A Full-Aperture Image Synthesis Method for the Rotating Rectangular Aperture System Using Fourier Spectrum Restoration


Abstract
:1. Introduction
2. Imaging Mechanism of the Rotating Rectangular Aperture (RRA) System
3. Full-Aperture Image Synthesis Algorithm Based on PSF Simulation and Fourier Spectrum Restoration
3.1. PSF Acquirement Using the Numerical Simulation Model of the RRA System
| Algorithm 1 A PSF numerical simulation model for the RRA system. |
| required: Aperture length and width , focal length , rotation angle interval |
| required: working wavelength , sensor pixel size and number , , frame number |
| 1: initialization , , , , , , |
| 2: Calculate , using Equation (7), then calculate using Equation (8) |
| 3: Calculate using Equation (9) |
| 4: for do |
| Given , calculate |
| Given , calculate using the affine transformation |
| Given , calculate using Equation (9) |
| end for |
| 5: return the simulated PSF sequence |
3.2. Full-Aperture Image Synthesis Based on Fourier Spectrum Restoration
| Algorithm 2 The image synthesis algorithm based on Fourier spectrum restoration for RRA system. |
| required: Image sequence , PSF sequence , step size , iteration number |
| required: sequence frame number , regularization weight , loss threshold |
| 1: Calculate , using Equation (10) |
| 2: for do |
| for do |
| Calculate using Equation (11) |
| Calculate the updated using Equation (16) |
| end for |
| Update using Equation (17), then |
| end for |
| 3: return the final reconstructed synthetic image |
4. Discussion of Simulation Results and Experimental Results
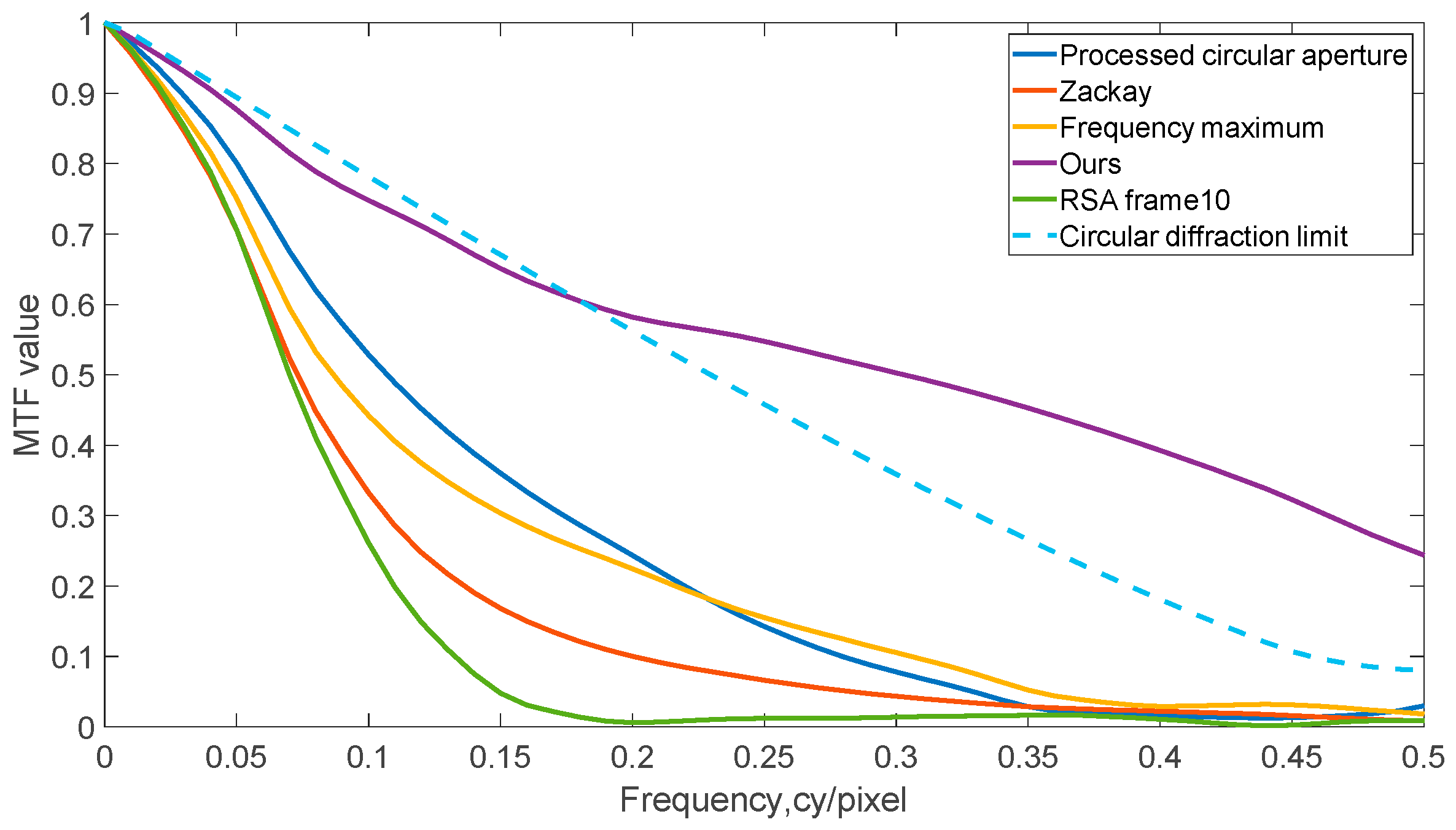
4.1. Numerical Simulation Results
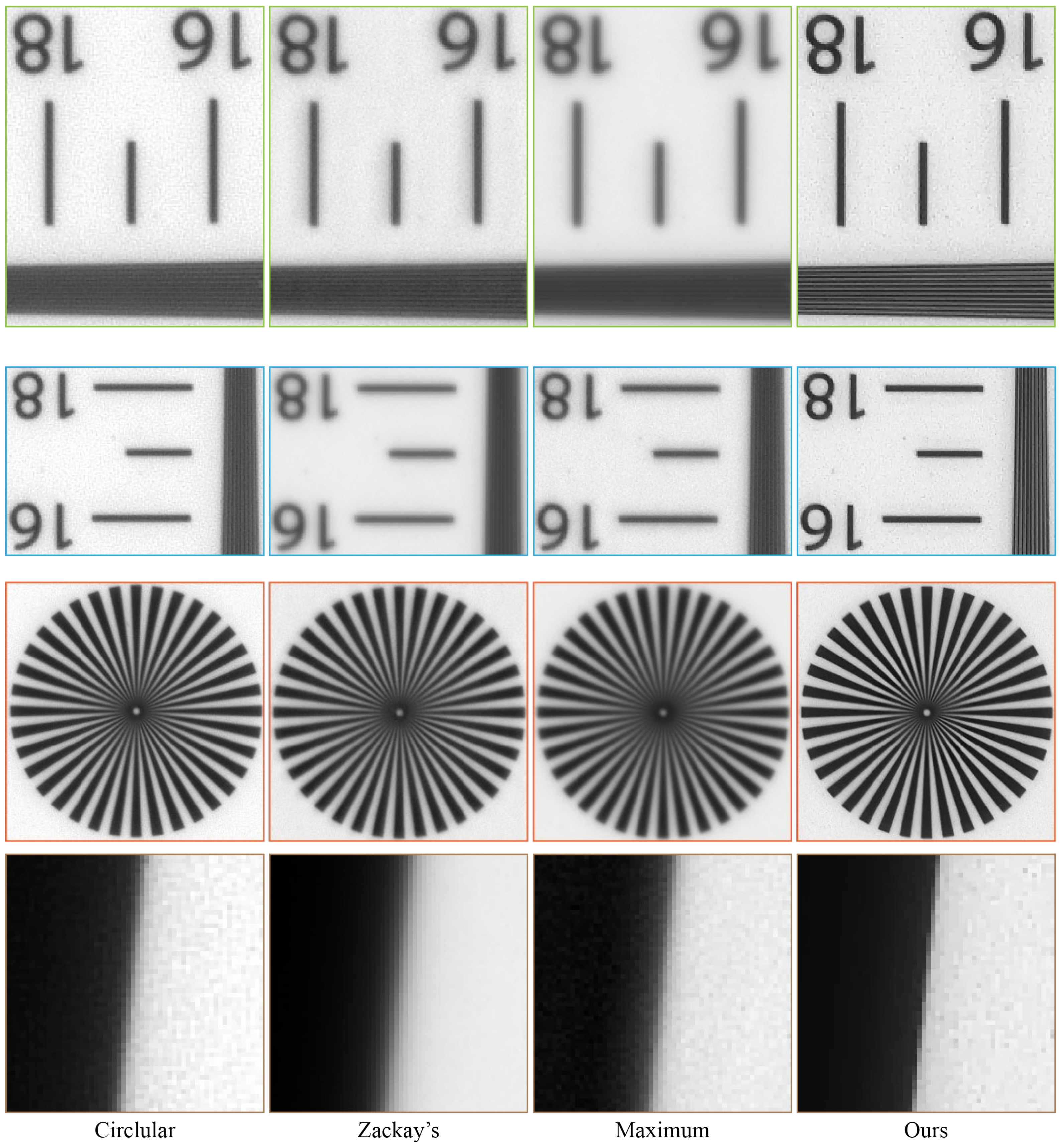
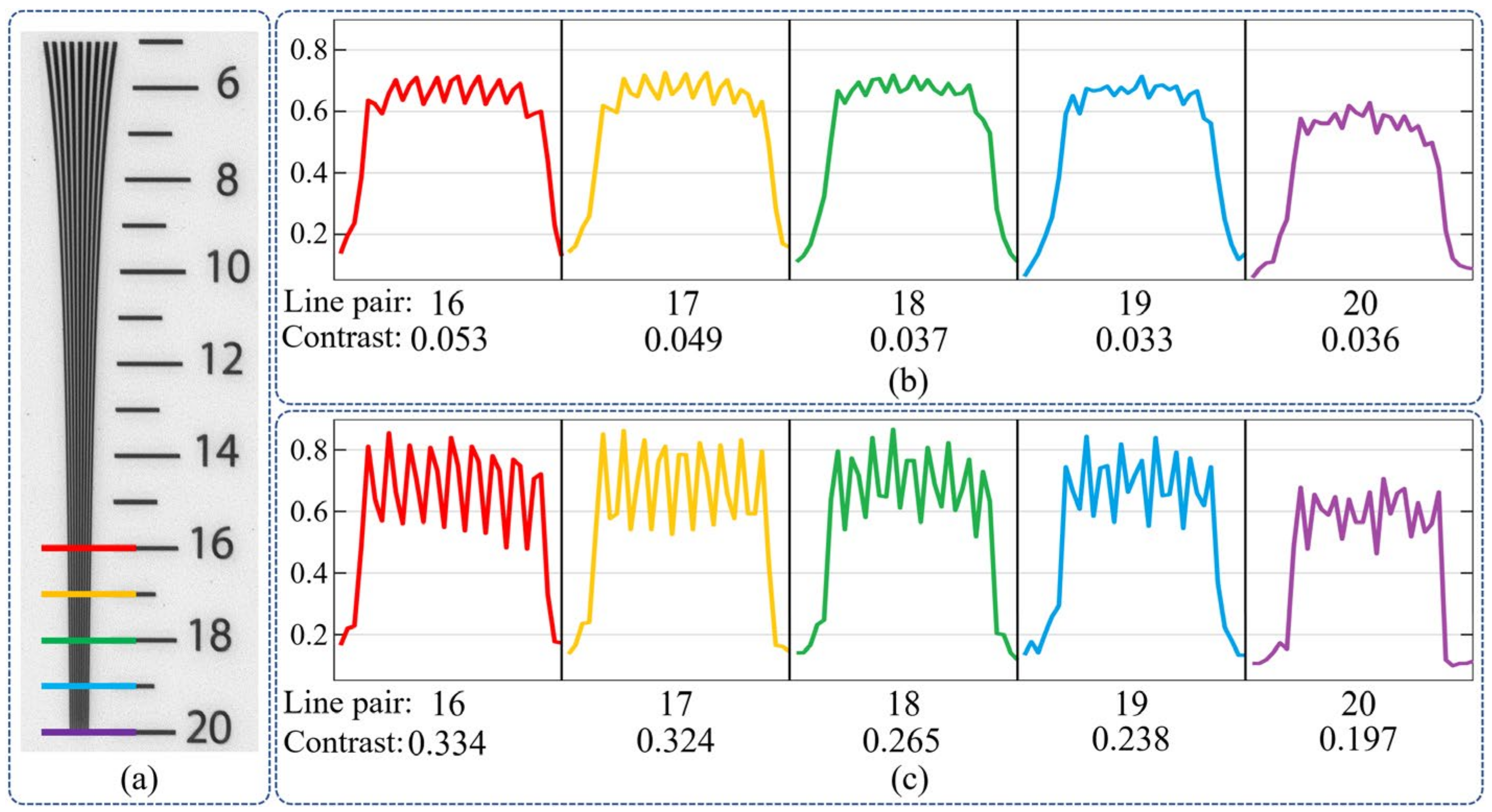
4.2. Practical Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.; Pei, Y.; Zhao, S.; Xiao, R.; Sang, X.; Zhang, C. A review of remote sensing for environmental monitoring in China. Remote Sens. 2020, 12, 1130. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.J.; Fan, Y.C.; Bao, H.; Xue, D.L. Applications and development of ultra large aperture space optical remote sensors. Opt. Precis. Eng. 2016, 24, 2613–2626. [Google Scholar] [CrossRef]
- Guo, L.; Xianghao, K. Overview and development trends of high-resolution optical imaging satellite at geostationary orbit. Spacecr. Recovery Remote Sens. 2018, 39, 55. [Google Scholar] [CrossRef] [Green Version]
- Kendrick, R.; Thurman, S.T.; Duncan, A.; Wilm, J.; Ogden, C. Segmented planar imaging detector for eo reconnaissance. In Computational Optical Sensing and Imaging; Optical Society of America: Washington, DC, USA, 2013. [Google Scholar]
- Chen, V.C.; Martorella, M. Inverse Synthetic Aperture Radar Imaging: Principles, Algorithms and Applications; SciTech: Edison, NJ, USA, 2014. [Google Scholar]
- Li, X.; Wang, W.; Shi, J.; Wang, C.; Zhao, H.; Fan, X. Design, analysis of self-configurable modular adjustable latch lock for segmented space mirrors. Opt. Express 2018, 26, 18064–18081. [Google Scholar] [CrossRef]
- Guo-mian, L.; Qi, L.; Yue-ting, C.; Hua-jun, F.; Zhi-hai, X.; Jingjing, M. An improved scheme and numerical simulation of segmented planar imaging detector for electro-optical reconnaissance. Opt. Rev. 2019, 26, 664–675. [Google Scholar] [CrossRef]
- Su, T.; Scott, R.P.; Ogden, C.; Thurman, S.T.; Kendrick, R.L.; Duncan, A.; Yu, R.; Yoo, S.J.B. Experimental demonstration of interferometric imaging using photonic integrated circuits. Opt. Express 2017, 25, 12653–12665. [Google Scholar] [CrossRef] [PubMed]
- Liu, G.; Wen, D.; Song, Z.; Jiang, T. System design of an optical interferometer based on compressive sensing: An update. Opt. Express 2020, 28, 19349–19361. [Google Scholar] [CrossRef] [PubMed]
- Rafanelli, G.; Cosner, C.; Spencer, S.; Wolfe, D.; Newman, A.; Polidan, R.; Chakrabarti, S. Revolutionary Astrophysics Using an Incoherent Synthetic Optical Aperture; SPIE: San Diego, CA, USA, 2017. Available online: https://www.spiedigitallibrary.org/conference-proceedings-of-spie/10398/103980P/Revolutionary-astrophysics-using-an-incoherent-synthetic-optical-aperture/10.1117/12.2272782.short?sessionGUID=ad883c9d-902b-c999-3ced-268bead49a28&sessionGUID=ad883c9d-902b-c999-3ced-268bead49a28&webSyncID=a0ce46e9-e6ec-7a49-dab6-a0cbad059329&tab=ArticleLink (accessed on 1 October 2021).
- Wu, P.; Zhang, Q.; Wang, F.; Wang, H.; Zhuang, J.; Han, S. Measuring transmitted wavefronts for non-circular apertures in broad bandwidths using discrete points. Results Phys. 2020, 17, 103095. [Google Scholar] [CrossRef]
- Nir, G.; Zackay, B.; Ofek, E.O. A Possible Advantage of Telescopes with a Noncircular Pupil. Astron. J. 2019, 158, 70. [Google Scholar] [CrossRef] [Green Version]
- Hall, D.L.; Llinas, J. An introduction to multi-sensor data fusion, Sensors, Nanoscience, Biomedical Engineering, and Instruments, Scopus, 2016, ISBN 142000316X, 0849373468, 9781420003161, 9780849373466. Available online: https://ieeexplore.ieee.org/document/554205 (accessed on 1 October 2021).
- Kulkarni, S.C.; Rege, P.P. Application of Taguchi method to improve land use land cover classification using PCA-DWT-based SAR-multispectral image fusion. J. Appl. Remote. Sens. 2021, 15, 014509. [Google Scholar] [CrossRef]
- Cheng, J.; Liu, H.; Liu, T.; Wang, F.; Li, H. Remote sensing image fusion via wavelet transform and sparse representation. ISPRS J. Photogramm. Remote Sens. 2015, 104, 158–173. [Google Scholar] [CrossRef]
- Lu, J.; Qiao, K.; Li, X.; Lu, Z.; Zou, Y. l(0)-minimization methods for image restoration problems based on wavelet frames. Inverse Probl. 2019, 35, 064001. [Google Scholar] [CrossRef]
- Yang, Y.; Ding, M.; Huang, S.; Que, Y.; Wan, W.; Yang, M.; Sun, J. Multi-Focus Image Fusion via Clustering PCA Based Joint Dictionary Learning. IEEE Access 2017, 5, 16985–16997. [Google Scholar] [CrossRef]
- Meher, B.; Agrawal, S.; Panda, R.; Abraham, A. A survey on region based image fusion methods. Inf. Fusion 2019, 48, 119–132. [Google Scholar] [CrossRef]
- Milgrom, B.; Avrahamy, R.; David, T.; Caspi, A.; Golovachev, Y.; Engelberg, S. Extended depth-of-field imaging employing integrated binary phase pupil mask and principal component analysis image fusion. Opt. Express 2020, 28, 23862–23873. [Google Scholar] [CrossRef] [PubMed]
- Zackay, B.; Ofek, E.O.; Gal-Yam, A. Proper image subtraction-optimal transient detection, photometry, and hypothesis testing. Astrophys. J. 2016, 830, 27. [Google Scholar]
- Zackay, B.; Ofek, E.O. How to COAAD Images. I. Optimal Source Detection and Photometry of Point Sources Using Ensembles of Images. Astrophys. J. 2017, 836, 187. [Google Scholar] [CrossRef] [Green Version]
- Zackay, B.; Ofek, E.O. How to COAAD Images. II. A Coaddition Image that is Optimal for Any Purpose in the Background-dominated Noise Limit. Astrophys. J. 2017, 836, 188. [Google Scholar] [CrossRef] [Green Version]
- Zhi, X.; Jiang, S.; Zhang, L.; Hu, J.; Yu, L.; Song, X.; Gong, J. Multi-frame image restoration method for novel rotating synthetic aperture imaging system. Results Phys. 2021, 23, 103991. [Google Scholar] [CrossRef]
- Zhou, H.; Chen, Y.; Feng, H.; Lv, G.; Xu, Z.; Li, Q. Rotated rectangular aperture imaging through multi-frame blind deconvolution with Hyper-Laplacian priors. Opt. Express 2021, 29, 12145–12459. [Google Scholar] [CrossRef]
- Pena, F.A.G.; Fernández, P.D.M.; Ren, T.I.; Leandro, J.J.; Nishihara, R. Burst ranking for blind multi-image deblurring. IEEE Trans. Image Process. 2018, 29, 947–958. [Google Scholar] [CrossRef]
- Chan, T.F.; Wong, C.K. Total variation blind deconvolution. IEEE Trans. Image Process. 1998, 7, 370–375. [Google Scholar] [CrossRef] [Green Version]
- Xu, L.; Zheng, S.; Jia, J. Unnatural L0 sparse representation for natural image deblurring. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; pp. 1107–1114. [Google Scholar]
- Dong, W.; Zhang, L.; Shi, G.; Li, X. Nonlocally Centralized Sparse Representation for Image Restoration. IEEE Trans. Image Process. 2013, 22, 1620–1630. [Google Scholar] [CrossRef] [Green Version]
- Hongbo, Z.; Liuyan, R.; Lingling, K.; Xujia, Q.; Meiyu, Z. Single image fast deblurring algorithm based on hyper-Laplacian model. IET Image Process. 2019, 13, 483–490. [Google Scholar] [CrossRef]
- Krishnan, D.; Fergus, R. Fast image deconvolution using hyper-laplacian priors. Adv. Neural Inf. Process. Syst. 2009, 22, 1033–1041. [Google Scholar]
- Pan, J.; Sun, D.; Pfister, H.; Yang, M.H. Blind image deblurring using dark channel prior. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Holloway, J. Synthetic Apertures for Visible Imaging using Fourier Ptychography; Rice University (ProQuest Dissertations & Theses, 2016), ISBN 978-0-355-38333-1. Available online: https://scholarship.rice.edu/handle/1911/95651 (accessed on 1 October 2021).
- Goodman, J.W. Introduction to Fourier Optics, 3rd ed.; Roberts & Company Publishers: Greenwood Village, CO, USA, 2004, ISBN 9780974707723. Available online: http://www.opticsjournal.net/post/ifo.pdf (accessed on 1 October 2021).
- Fienup, J.R.; Fienup, J.R. Phase retrieval algorithms: A comparison. Appl. Opt. 1982, 21, 2758–2769. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System’s Structural Parameters | Value |
|---|---|
| Rectangular aperture length X and width Y | 0.1 m, 0.02 m |
| System’s focal length f | 0.7m |
| Working wavelength λ | 550 nm |
| Rotation angle interval | 10° |
| sensor pixel size d, row number and column number | 3.45 μm, 3000, 4096 |
| Sequence images frame number | 18 |
| Target | Pixel Resolution | Image Restoration Method | Valuation Indicators | Running Time (s) | |
|---|---|---|---|---|---|
| PSNR (dB) | SSIM | ||||
| ISO12233 (2000 lines) | 1500 × 1500 | Processed circular | 30.23 | 0.760 | -- |
| Zackay’s | 26.64 | 0.832 | 2.95 | ||
| Frequency Maximum | 27.33 | 0.692 | 6.29 | ||
| Ours | 33.78 | 0.872 | 4.52 | ||
| Wharf | 2250 × 2250 | Processed circular | 27.99 | 0.747 | -- |
| Zackay’s | 25.67 | 0.814 | 6.11 | ||
| Frequency Maximum | 27.49 | 0.673 | 15.47 | ||
| Ours | 30.91 | 0.890 | 11.72 | ||
| Boat | 2736 × 2736 | Processed circular | 29.27 | 0.683 | -- |
| Zackay’s | 25.07 | 0.794 | 12.65 | ||
| Frequency Maximum | 27.50 | 0.679 | 27.73 | ||
| Ours | 30.58 | 0.817 | 17.28 | ||
| Real Shot Target | Pixel Resolution | Image Restoration Method | Running Time (s) |
|---|---|---|---|
| ISO 12233 (4000 lines) | 1200 × 1200 | Zackay’s | 2.75 |
| Frequency maximum | 4.78 | ||
| Ours | 4.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, G.; Xu, H.; Feng, H.; Xu, Z.; Zhou, H.; Li, Q.; Chen, Y. A Full-Aperture Image Synthesis Method for the Rotating Rectangular Aperture System Using Fourier Spectrum Restoration. Photonics 2021, 8, 522. https://doi.org/10.3390/photonics8110522
Lv G, Xu H, Feng H, Xu Z, Zhou H, Li Q, Chen Y. A Full-Aperture Image Synthesis Method for the Rotating Rectangular Aperture System Using Fourier Spectrum Restoration. Photonics. 2021; 8(11):522. https://doi.org/10.3390/photonics8110522
Chicago/Turabian StyleLv, Guomian, Hao Xu, Huajun Feng, Zhihai Xu, Hao Zhou, Qi Li, and Yueting Chen. 2021. "A Full-Aperture Image Synthesis Method for the Rotating Rectangular Aperture System Using Fourier Spectrum Restoration" Photonics 8, no. 11: 522. https://doi.org/10.3390/photonics8110522