
Data Driven Model Estimation for Aerial Vehicles: A Perspective Analysis

 ,
,  , and
, and 
Abstract
:1. Introduction
1.1. Related Work
1.2. Motivating Problems for This Paper
1.3. Main Contributions of This Paper
1.4. Sequence of This Paper
2. Problem Formulation
2.1. 6 DOF Flight Dynamics Model
Aerodynamic Parameters
3. Model Identification
- Acquiring data for two sorties of experimental UAV.
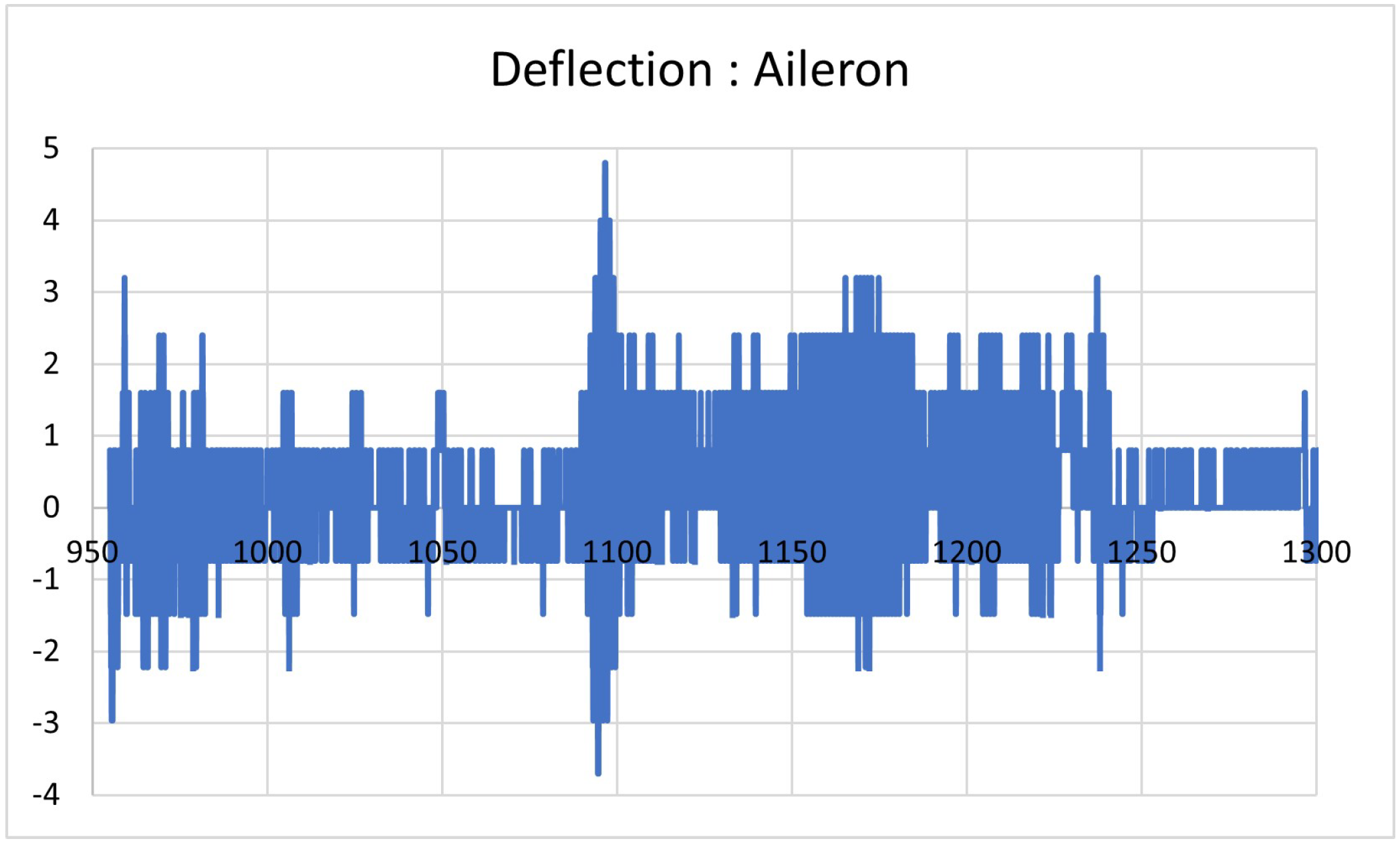
- Pre-processing and filtering the data for whole flight of the UAV.
- Model identification using flight data from one sortie using ARX, ARMAX, Output Error, Box Jenkin’s, Non-linear ARX (with various estimators).
- Training of model for each individual technique
- Selection of best fit model on basis of model quality parameters like Final Prediction Error (FPE), fit percentage to actual flight data and residual analysis.
- Validation of selected model on a different flight data and analysis of the results.
3.1. Model Structures
3.1.1. Auto-Regressive Exogenous (ARX) Model
3.1.2. Auto Regressive Moving Average eXogenous (ARMAX) Model
3.1.3. Box Jenkin’s (BJ) Model
3.1.4. Output Error (OE) Model
3.1.5. State Space Model
3.1.6. Nonlinear-ARX Model
4. Results and Analysis
- Final Prediction Error (FPE)
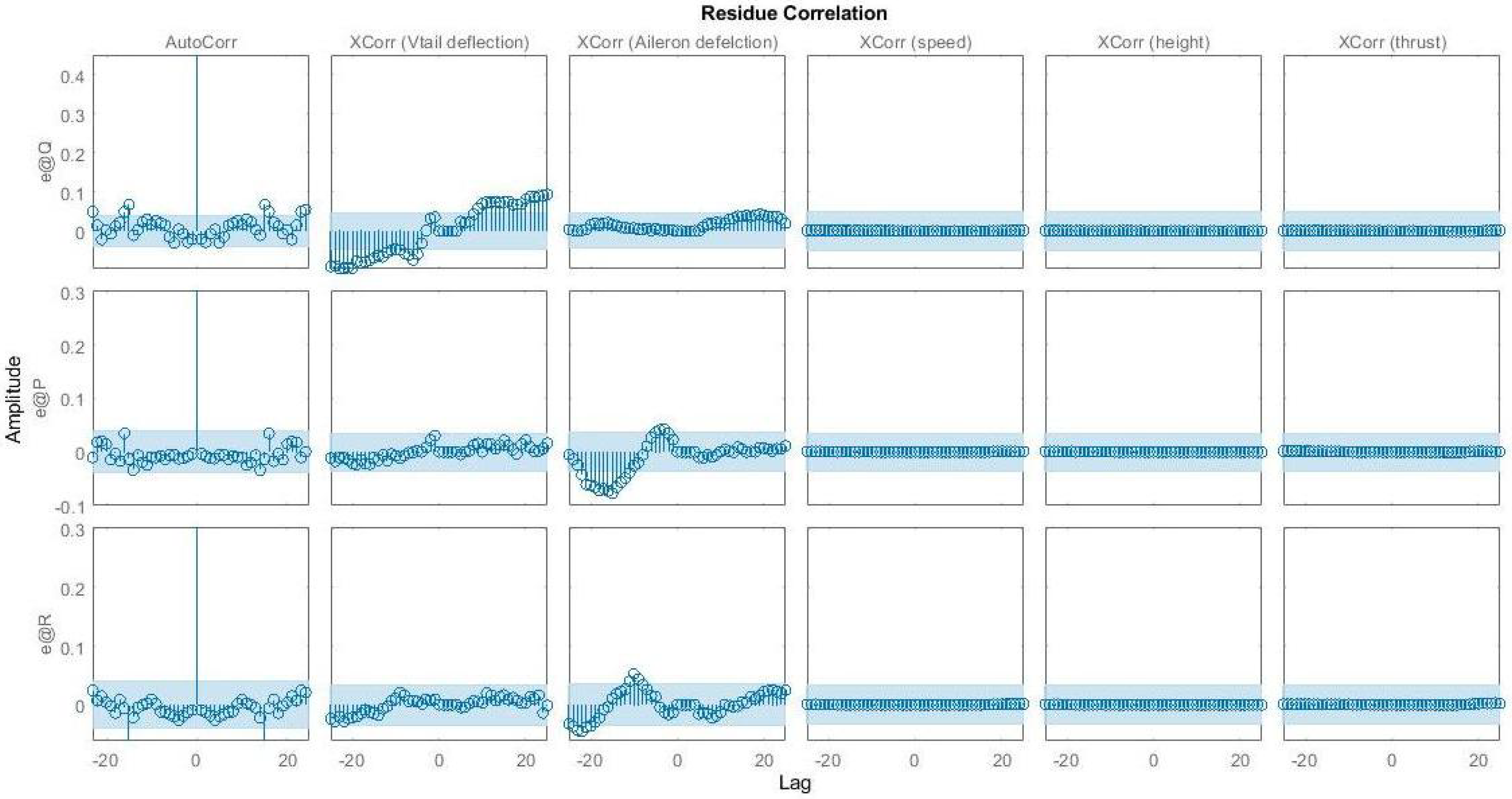
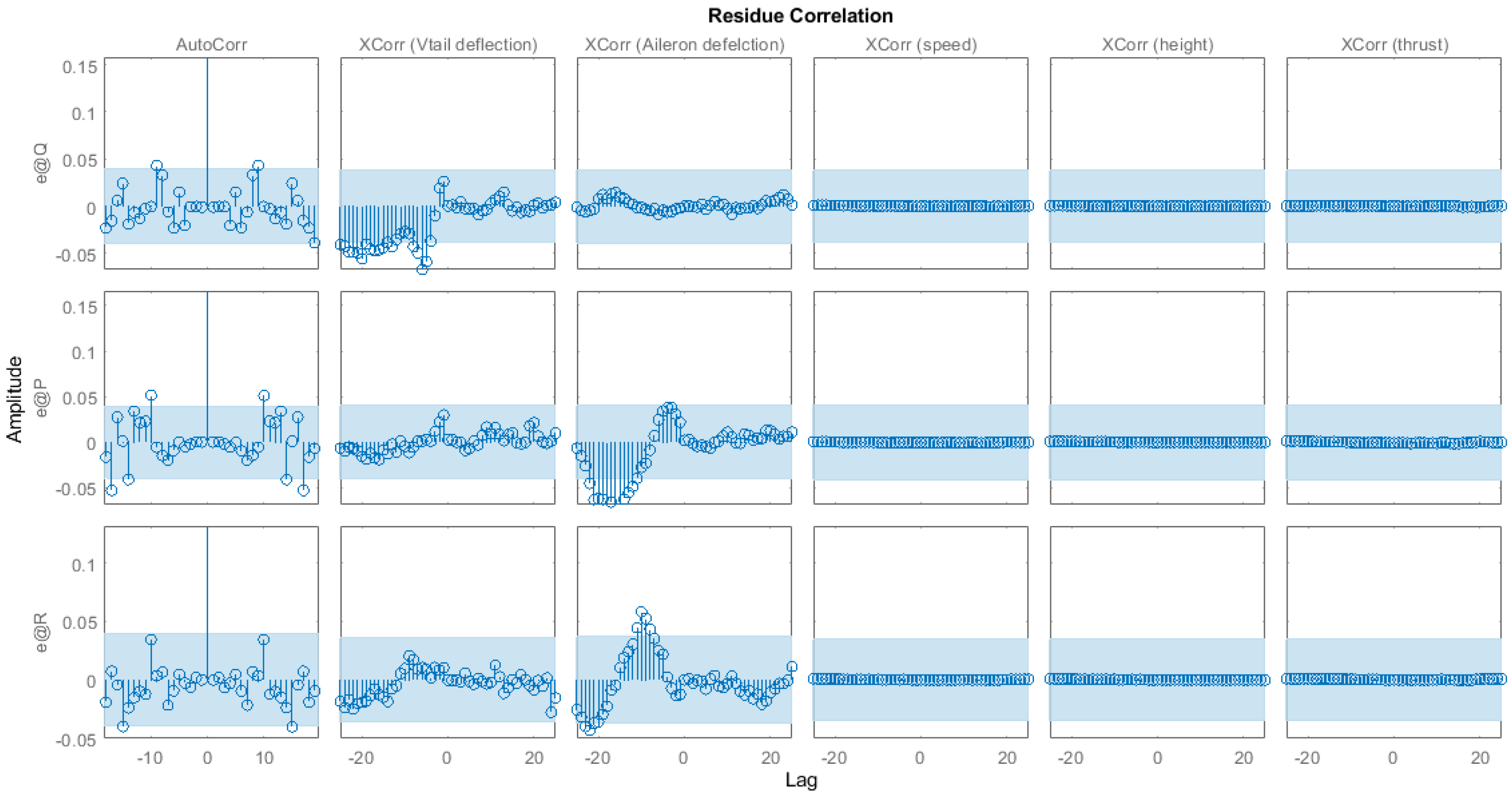
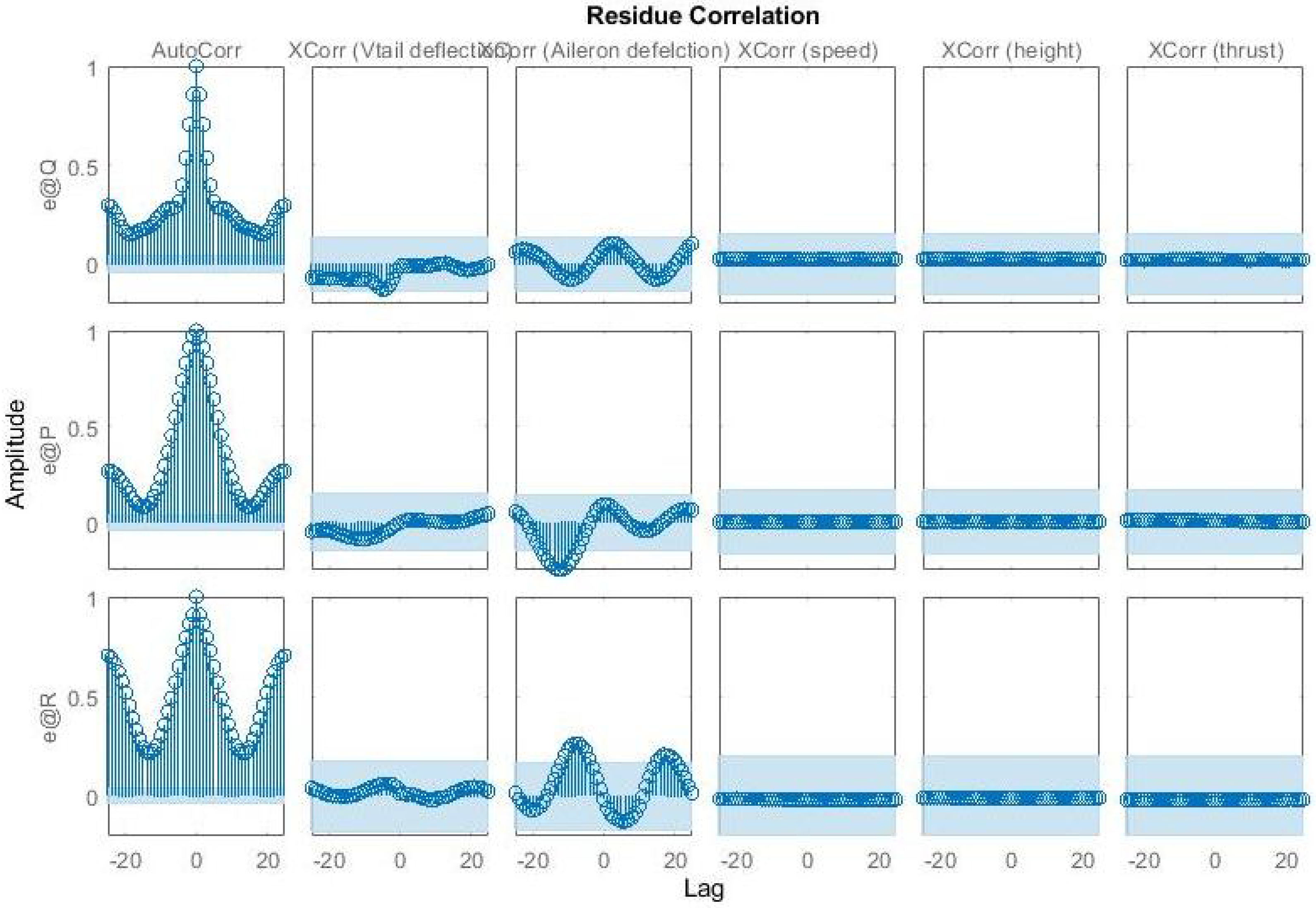
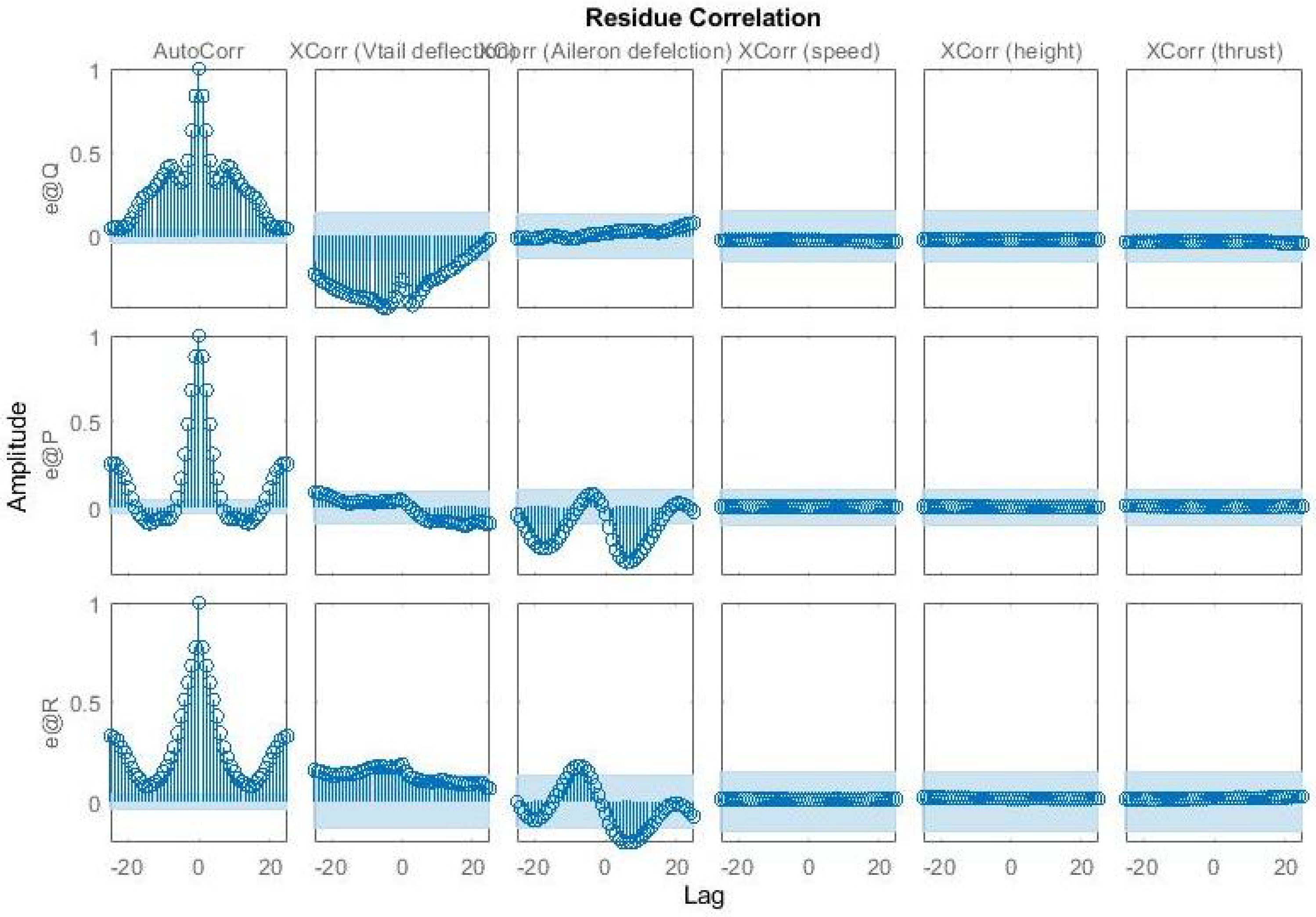
- Residual Analysis
- Percentage of fit to validation data
- Mean Squared Error (MSE)
4.1. Flight Designs
4.1.1. Flight 1 (Estimation)
4.1.2. Flight 2 (Validation)
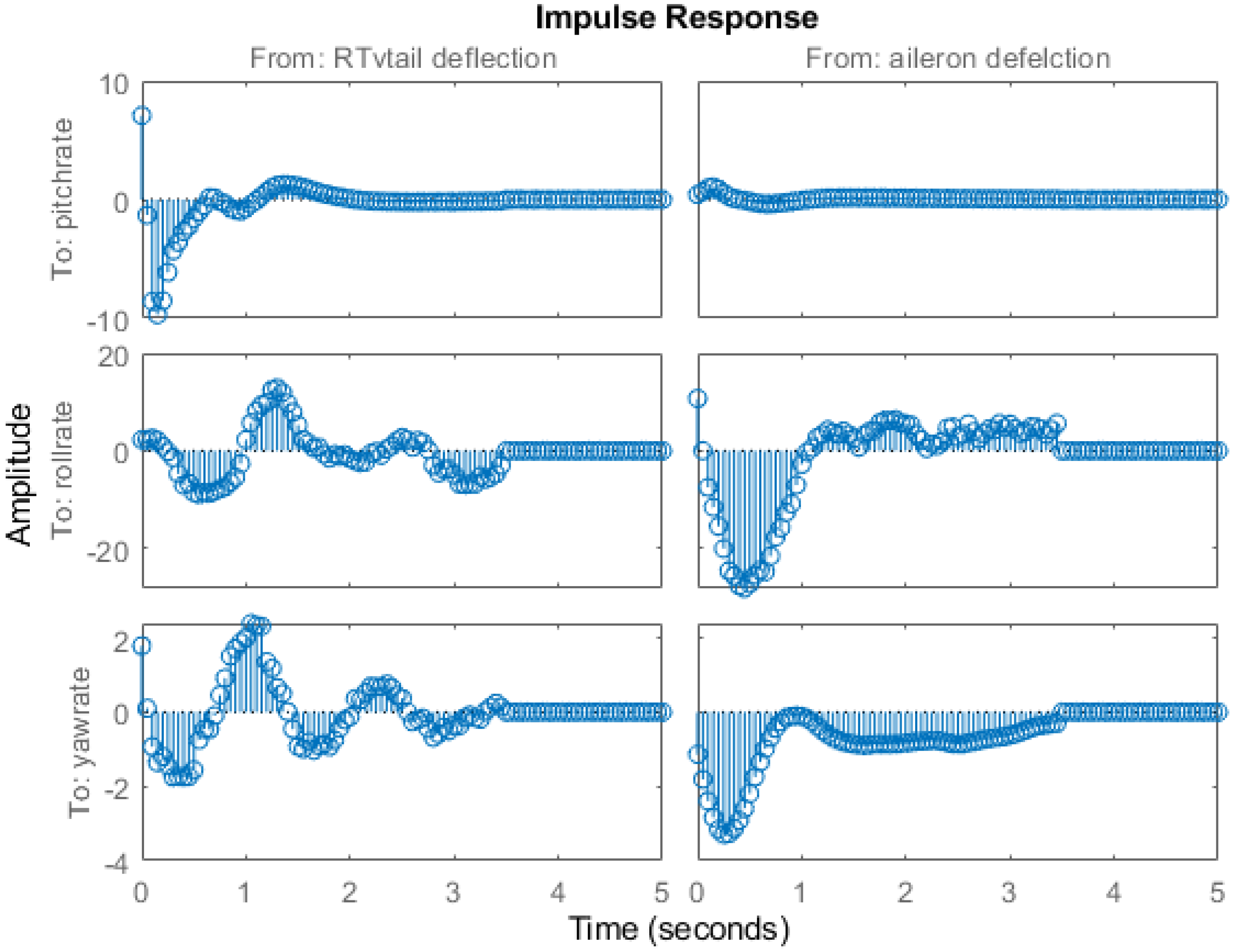
4.2. Finite Impulse Response (FIR) Model
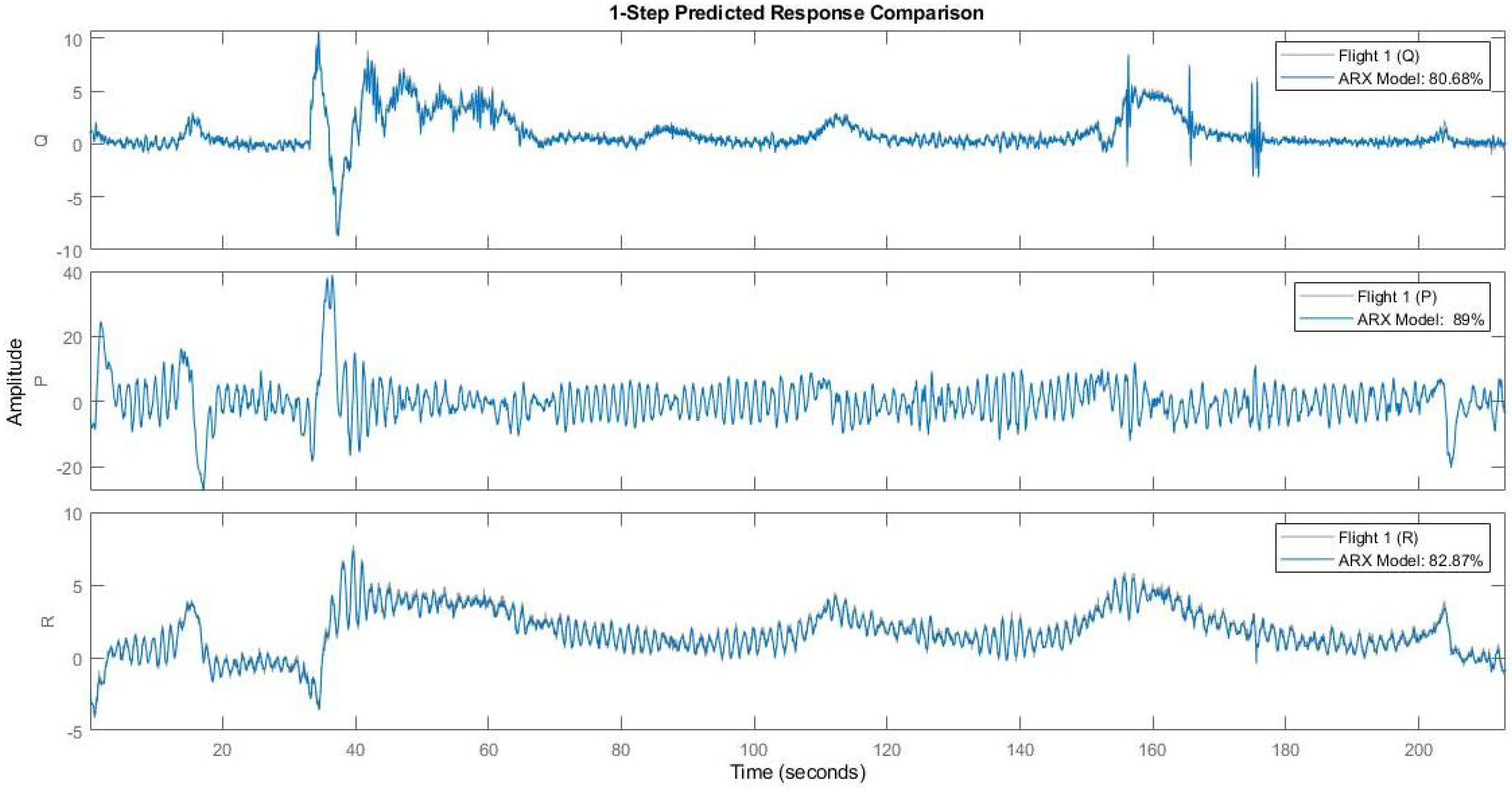
4.3. Auto Regressive Exogenous (ARX) Model
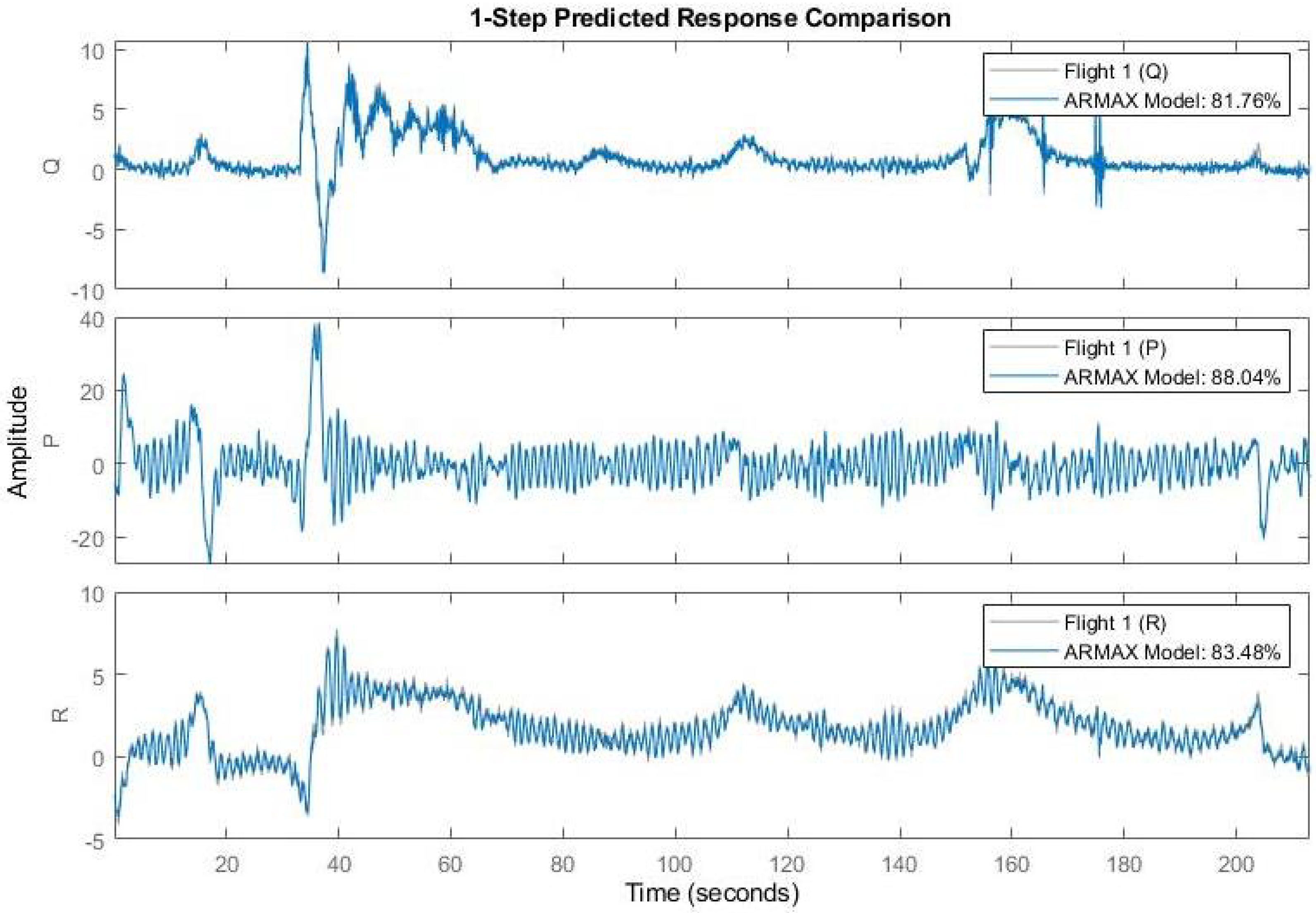
4.4. Autoregressive Moving Average eXogenous (ARMAX) Model
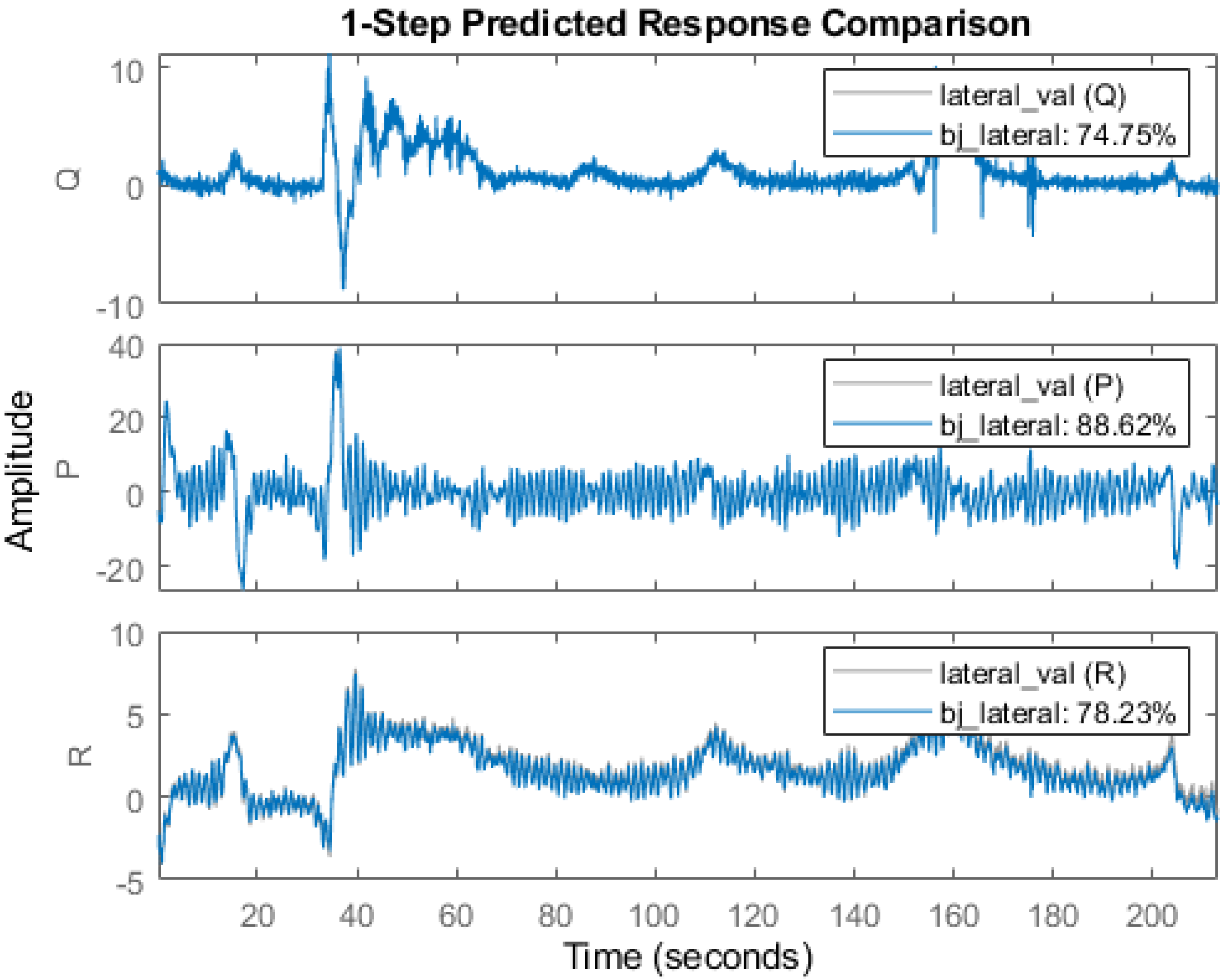
4.5. Box Jenkin’s (BJ Model)
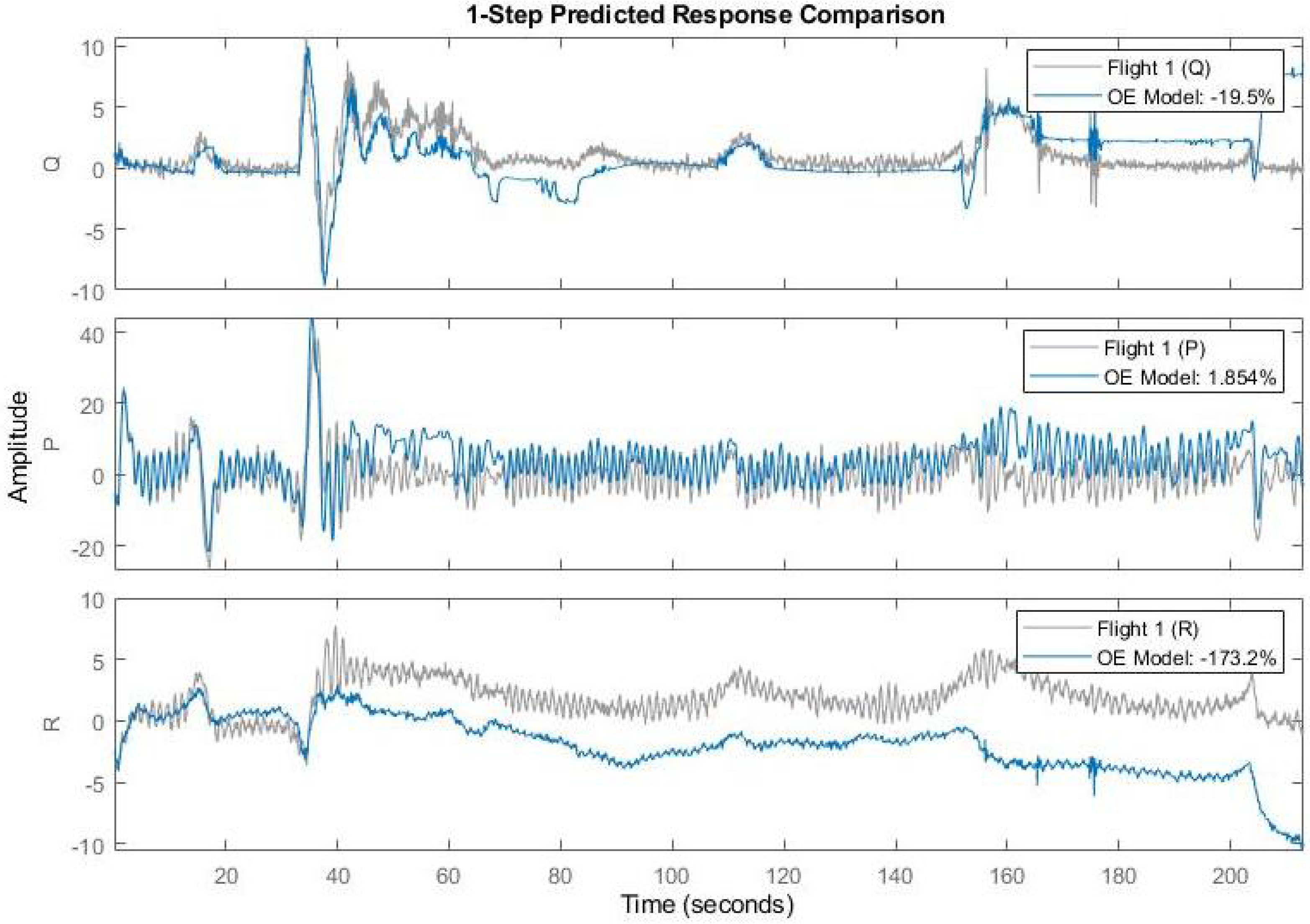
4.6. Output Error (OE) Model
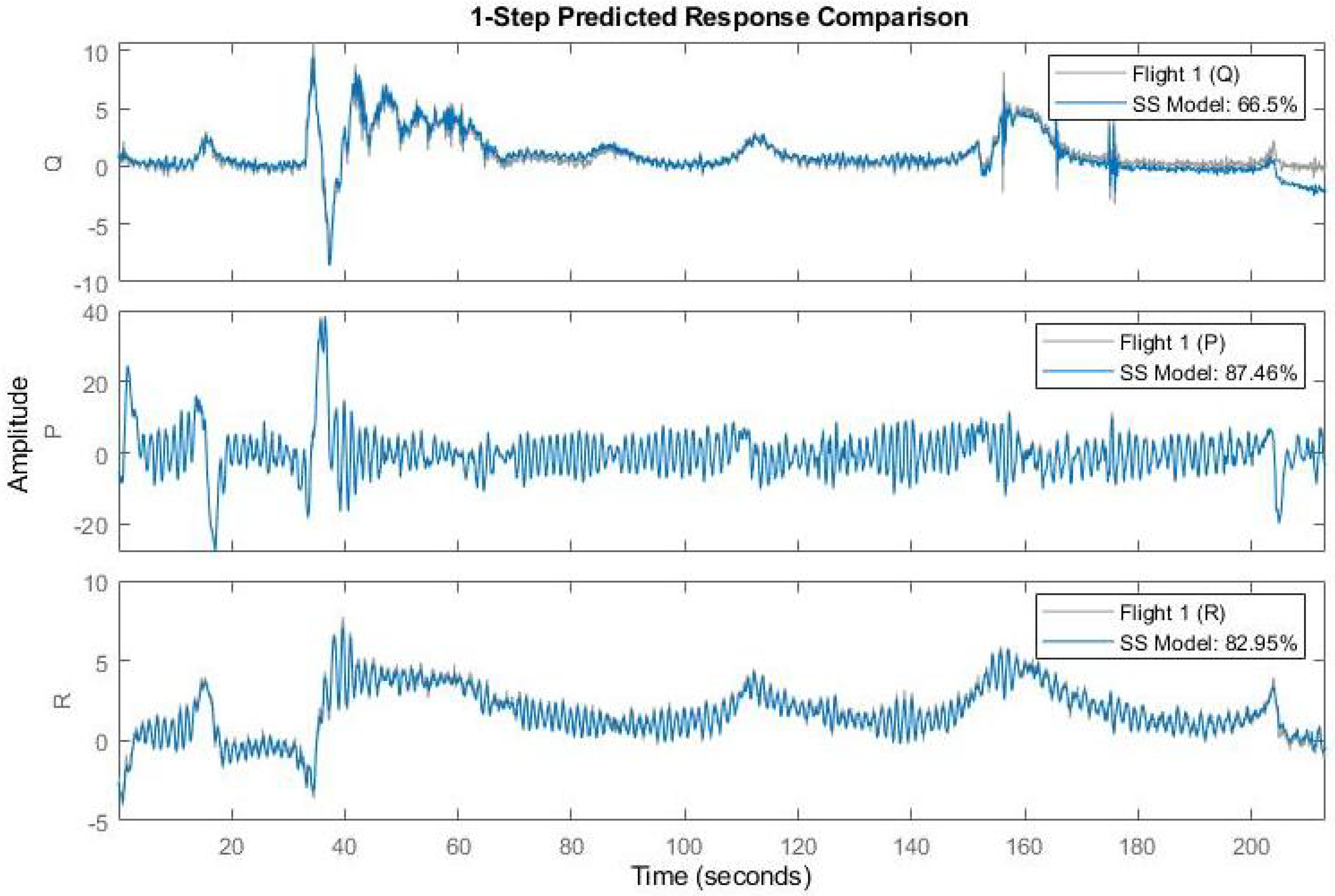
4.7. State Space Model
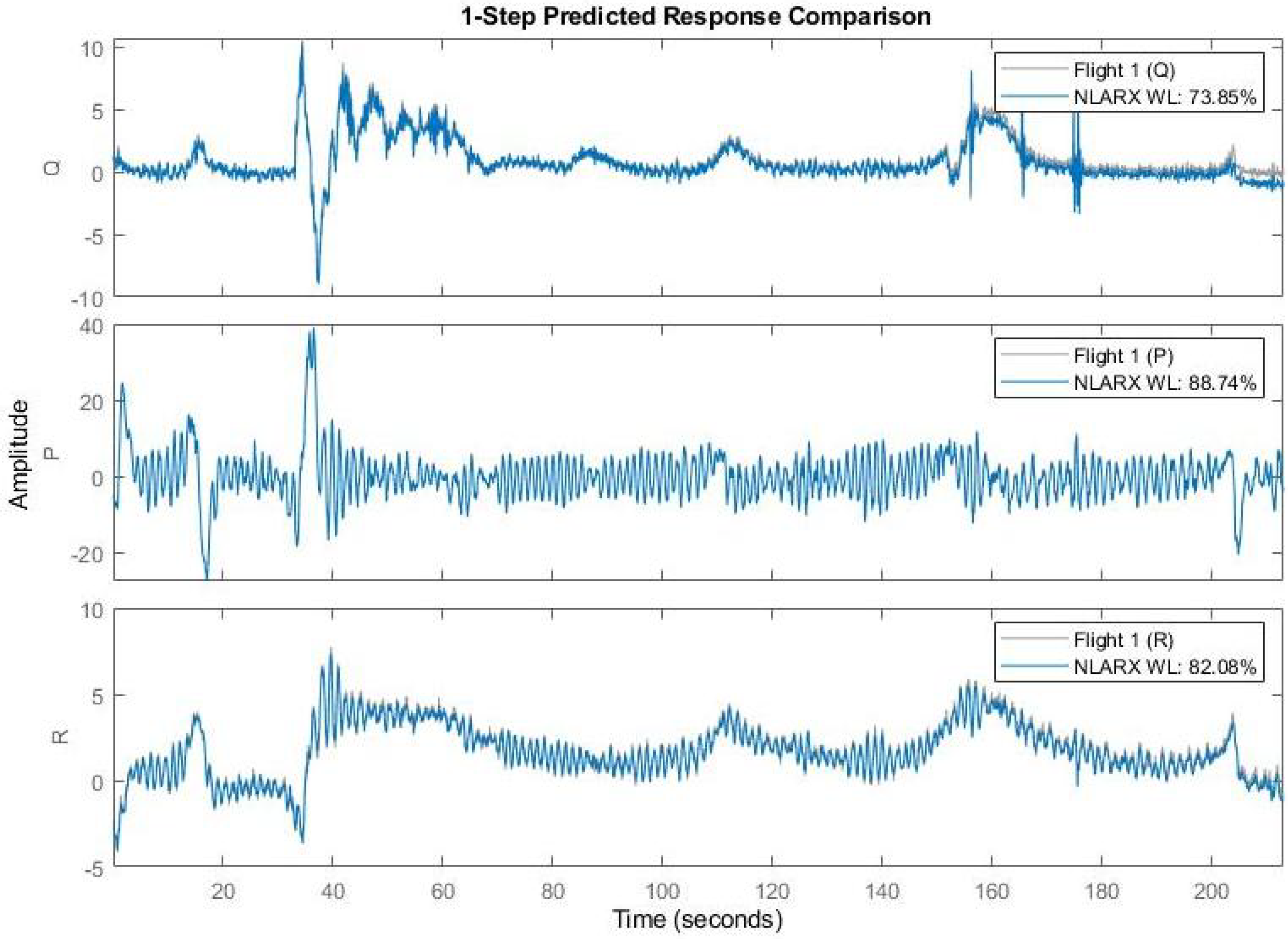
4.8. Non-Linear ARX Model
4.9. Comparative Analysis
4.10. Discussion and Remarks
4.11. Research Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Mean aerodynamic chord (m) | |
| Coefficients of drag, side force and lift | |
| moment coefficients of Roll, pitch and yaw | |
| D | Drag (N) |
| g | Acceleration due to gravitational force (ms) |
| GCM | Guidance and Control Module |
| h | Altitude (m) |
| UAV | Unmanned High Speed Aerial Vehicle |
| Components of the inertia matrix components in body frame | |
| Free-stream velocity (m/s) | |
| L | Lift (N) |
| m | Mass of the vehicle (kg) |
| n, m, l | (yaw, pitch and roll moments respectively) defined in body frame (Nm) |
| Position coordinates along the inertial east and north directions (m) | |
| p, q, r | Roll, pitch and yaw rates in body frame (deg/s) |
| Free stream dynamic pressure (N/m) | |
| Reference area (m) | |
| (axial, side and tangential force respectively) in the body frame (N) | |
| T | Engine thrust (N) |
| U, V, W | Linear velocity along body x, y and z axis respectively (m/s) |
| W | Weight (N) |
| ARX | Automatic Regression eXogenous |
| ARMAX | Automatic Regression Moving Average eXogenous |
| BJ | Box Jenkin’s |
| OE | Output Error |
| SS | State Space |
| TP | Tree Partition |
| WL | WaveLet Network |
| NN | Neural Network |
| FPE | Final Prediction Error |
| MSE | Mean Squared Error |
| n | Model order for state space model |
| Order of Polynomial | |
| Order of Polynomial | |
| Order of Polynomial | |
| Order of Polynomial |
Greek Symbols
| Air density (kg/m) | |
| Side slip angle (deg) | |
| Aerodynamic angle of attack (deg) | |
| Roll, pitch and azimuth angles describing body frame w.r.t inertial frame (deg) | |
| Flight path angle (deg) | |
| ,, | aileron, elevator and flap controls respectively |
References
- Gul, F.; Mir, I.; Abualigah, L.; Mir, S.; Altalhi, M. Cooperative multi-function approach: A new strategy for autonomous ground robotics. Future Gener. Comput. Syst. 2022, 134, 361–373. [Google Scholar] [CrossRef]
- Din, A.F.U.; Mir, I.; Gul, F.; Nasar, A.; Rustom, M.; Abualigah, L. Reinforced Learning-Based Robust Control Design for Unmanned Aerial Vehicle. Arab. J. Sci. Eng. 2022, 1–16. [Google Scholar] [CrossRef]
- Din, A.F.U.; Akhtar, S.; Maqsood, A.; Habib, M.; Mir, I. Modified model free dynamic programming: An augmented approach for unmanned aerial vehicle. Appl. Intell. 2022, 1–21. [Google Scholar] [CrossRef]
- Mir, I.; Eisa, S.A.; Maqsood, A. Review of dynamic soaring: Technical aspects, nonlinear modeling perspectives and future directions. Nonlinear Dyn. 2018, 94, 3117–3144. [Google Scholar] [CrossRef]
- Mir, I.; Maqsood, A.; Akhtar, S. Biologically inspired dynamic soaring maneuvers for an unmanned air vehicle capable of sweep morphing. Int. J. Aeronaut. Space Sci. 2018, 19, 1006–1016. [Google Scholar] [CrossRef]
- Mir, I.; Maqsood, A.; Akhtar, S. Dynamic modeling & stability analysis of a generic UAV in glide phase. In Proceedings of the MATEC Web of Conferences, EDP Sciences, Ulis, France, 10 July 2017; Volume 114, p. 01007. [Google Scholar]
- Mir, I.; Eisa, S.A.; Taha, H.; Maqsood, A.; Akhtar, S.; Islam, T.U. A stability perspective of bioinspired unmanned aerial vehicles performing optimal dynamic soaring. Bioinspiration Biomim. 2021, 16, 066010. [Google Scholar] [CrossRef]
- Gul, F.; Mir, S.; Mir, I. Coordinated Multi-Robot Exploration: Hybrid Stochastic Optimization Approach. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 1414. [Google Scholar]
- Gul, F.; Mir, S.; Mir, I. Multi Robot Space Exploration: A Modified Frequency Whale Optimization Approach. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 1416. [Google Scholar]
- Gul, F.; Mir, I.; Abualigah, L.; Sumari, P. Multi-Robot Space Exploration: An Augmented Arithmetic Approach. IEEE Access 2021, 9, 107738–107750. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W.; Alhady, S.N.; Ali, A.; Mir, I.; Jalil, A. Meta-heuristic approach for solving multi-objective path planning for autonomous guided robot using PSO–GWO optimization algorithm with evolutionary programming. J. Ambient Intell. Humaniz. Comput. 2021, 12, 7873–7890. [Google Scholar] [CrossRef]
- Gul, F.; Mir, I.; Rahiman, W.; Islam, T.U. Novel Implementation of Multi-Robot Space Exploration Utilizing Coordinated Multi-Robot Exploration and Frequency Modified Whale Optimization Algorithm. IEEE Access 2021, 9, 22774–22787. [Google Scholar] [CrossRef]
- Gul, F.; Mir, I.; Abualigah, L.; Sumari, P.; Forestiero, A. A Consolidated Review of Path Planning and Optimization Techniques: Technical Perspectives and Future Directions. Electronics 2021, 10, 2250. [Google Scholar] [CrossRef]
- Gul, F.; Alhady, S.S.N.; Rahiman, W. A review of controller approach for autonomous guided vehicle system. Indones. J. Electr. Eng. Comput. Sci. 2020, 20, 552–562. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W. An Integrated approach for Path Planning for Mobile Robot Using Bi-RRT. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Kuala Terengganu, Malaysia, 27–28 August 2019; IOP Publishing: Kuala Terengganu, Malaysia, 2019; Volume 697, p. 012022. [Google Scholar]
- Gul, F.; Rahiman, W.; Nazli Alhady, S.S. A comprehensive study for robot navigation techniques. Cogent Eng. 2019, 6, 1632046. [Google Scholar] [CrossRef]
- Szczepanski, R.; Tarczewski, T.; Grzesiak, L.M. Adaptive state feedback speed controller for PMSM based on Artificial Bee Colony algorithm. Appl. Soft Comput. 2019, 83, 105644. [Google Scholar] [CrossRef]
- Szczepanski, R.; Bereit, A.; Tarczewski, T. Efficient Local Path Planning Algorithm Using Artificial Potential Field Supported by Augmented Reality. Energies 2021, 14, 6642. [Google Scholar] [CrossRef]
- Szczepanski, R.; Tarczewski, T. Global path planning for mobile robot based on Artificial Bee Colony and Dijkstra’s algorithms. In Proceedings of the 2021 IEEE 19th International Power Electronics and Motion Control Conference (PEMC), Gliwice, Poland, 25–29 April 2021; pp. 724–730. [Google Scholar]
- Khalil, B.; Yesildirek, A. System identification of UAV under an autopilot trajectory using ARX and Hammerstein-Wiener methods. In Proceedings of the 7th International Symposium on Mechatronics and Its Applications, Sharjah, United Arab Emirates, 20–22 April 2010; pp. 1–5. [Google Scholar]
- Mir, I.; Akhtar, S.; Eisa, S.; Maqsood, A. Guidance and control of standoff air-to-surface carrier vehicle. Aeronaut. J. 2019, 123, 283–309. [Google Scholar] [CrossRef]
- Mir, I.; Taha, H.; Eisa, S.A.; Maqsood, A. A controllability perspective of dynamic soaring. Nonlinear Dyn. 2018, 94, 2347–2362. [Google Scholar] [CrossRef]
- Mir, I.; Maqsood, A.; Eisa, S.A.; Taha, H.; Akhtar, S. Optimal morphing–augmented dynamic soaring maneuvers for unmanned air vehicle capable of span and sweep morphologies. Aerosp. Sci. Technol. 2018, 79, 17–36. [Google Scholar] [CrossRef]
- Mir, I.; Maqsood, A.; Taha, H.E.; Eisa, S.A. Soaring Energetics for a Nature Inspired Unmanned Aerial Vehicle. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 1622. [Google Scholar]
- Hussain, A.; Hussain, I.; Mir, I.; Afzal, W.; Anjum, U.; Channa, B.A. Target Parameter Estimation in Reduced Dimension STAP for Airborne Phased Array Radar. In Proceedings of the 2020 IEEE 23rd International Multitopic Conference (INMIC), Bahawalpur, Pakistan, 5–7 November 2020; pp. 1–6. [Google Scholar]
- Hussain, A.; Anjum, U.; Channa, B.A.; Afzal, W.; Hussain, I.; Mir, I. Displaced Phase Center Antenna Processing For Airborne Phased Array Radar. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 988–992. [Google Scholar]
- Gul, F.; Rahiman, W. Mathematical Modeling of Self Balancing Robot and Hardware Implementation. In Proceedings of the 11th International Conference on Robotics, Vision, Signal Processing and Power Applications: Universiti Sains Malaysia, Penang, Malaysia, 5–6 April 2021; Springer: Penang, Malaysia, 2022; pp. 20–26. [Google Scholar]
- Hopping, B.M.; Garrett, T.M. Low Speed Airfoil Design for Aerodynamic Improved Performance of UAVs. U.S. Patent 9,868,525, 29 June 2018. [Google Scholar]
- Mir, I.; Maqsood, A.; Akhtar, S. Optimization of dynamic soaring maneuvers to enhance endurance of a versatile UAV. In Proceedings of the IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bangkok, Thailand, 2017; Volume 211, p. 012010. [Google Scholar]
- Mestrinho, J.; Gamboa, P.; Santos, P. Design optimization of a variable-span morphing wing for a small UAV. In Proceedings of the 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Denver, CO, USA, 4–7 April 2011; Volume 47. [Google Scholar]
- Mir, I.; Eisa, S.A.; Taha, H.; Maqsood, A.; Akhtar, S.; Islam, T.U. A stability perspective of bio-inspired UAVs performing dynamic soaring optimally. Bioinspir. Biomim. 2021. [Google Scholar] [CrossRef]
- Ahsan, J.; Ahsan, M.; Jamil, A.; Ali, A. Grey Box Modeling of Lateral-Directional Dynamics of a UAV through System Identification. In Proceedings of the 2016 International Conference on Frontiers of Information Technology (FIT), Islamabad, Pakistan, 19–21 December 2016; pp. 324–329. [Google Scholar]
- Rasheed, A. Grey box identification approach for longitudinal and lateral dynamics of UAV. In Proceedings of the 2017 International Conference on Open Source Systems & Technologies (ICOSST), Lahore, Pakistan, 18–20 December 2017; pp. 10–14. [Google Scholar]
- BELGE, E.; Hızır, K.; PARLAK, A.; ALTAN, A.; HACIOĞLU, R. Estimation of small unmanned aerial vehicle lateral dynamic model with system identification approaches. Balk. J. Electr. Comput. Eng. 2020, 8, 121–126. [Google Scholar] [CrossRef]
- Altan, A.; Aslan, Ö.; Hacıoğlu, R. Model predictive control of load transporting system on unmanned aerial vehicle (UAV). In Proceedings of the Fifth International Conference on Advances in Mechanical and Robotics Engineering, Rome, Italy, 1 May 2017; Institute of Research Engineers and Doctors: Rome, Italy, 2017; pp. 1–4. [Google Scholar]
- Dube, C.; Pedro, J.O. Modelling and closed-loop system identification of a quadrotor-based aerial manipulator. J. Phy. Conf. Ser. 2018, 1016, 012007. [Google Scholar]
- Cavanini, L.; Ferracuti, F.; Longhi, S.; Monteriù, A. Ls-svm for lpv-arx identification: Efficient online update by low-rank matrix approximation. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 1–4 September 2020; pp. 1590–1595. [Google Scholar]
- Cavanini, L.; Ippoliti, G.; Camacho, E.F. Model predictive control for a linear parameter varying model of an UAV. J. Intell. Robot. Syst. 2021, 101, 1–18. [Google Scholar]
- Belge, E.; Altan, A.; Hacıoğlu, R. Metaheuristic Optimization-Based Path Planning and Tracking of Quadcopter for Payload Hold-Release Mission. Electronics 2022, 11, 1208. [Google Scholar] [CrossRef]
- Weng, Y.; Nan, D.; Wang, N.; Liu, Z.; Guan, Z. Compound robust tracking control of disturbed quadrotor unmanned aerial vehicles: A data-driven cascade control approach. Trans. Inst. Meas. Control 2022, 44, 941–951. [Google Scholar] [CrossRef]
- Lecerf, M.; Allaire, D.; Willcox, K. Methodology for dynamic data-driven online flight capability estimation. AIAA J. 2015, 53, 3073–3087. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, J.; Ahn, C.K.; Xiang, Z. Neural adaptive distributed formation control of nonlinear multi-uavs with unmodeled dynamics. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef]
- Saengphet, W.; Tantrairatn, S.; Thumtae, C.; Srisertpol, J. Implementation of system identification and flight control system for UAV. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 24–26 April 2017; pp. 678–683. [Google Scholar]
- Bnhamdoon, O.A.A.; Mohamad Hanif, N.H.H.; Akmeliawati, R. Identification of a quadcopter autopilot system via Box–Jenkins structure. Int. J. Dyn. Control 2020, 8, 835–850. [Google Scholar] [CrossRef]
- Ayyad, A.; Chehadeh, M.; Awad, M.I.; Zweiri, Y. Real-time system identification using deep learning for linear processes with application to unmanned aerial vehicles. IEEE Access 2020, 8, 122539–122553. [Google Scholar] [CrossRef]
- Munguía, R.; Urzua, S.; Grau, A. EKF-based parameter identification of multi-rotor unmanned aerial vehiclesmodels. Sensors 2019, 19, 4174. [Google Scholar] [CrossRef]
- Puttige, V.R.; Anavatti, S.G. Real-time system identification of unmanned aerial vehicles: A multi-network approach. J. Comput. 2008, 3, 31–38. [Google Scholar] [CrossRef]
- Wu, Z.; Karimi, H.R.; Dang, C. An approximation algorithm for graph partitioning via deterministic annealing neural network. Neural Netw. 2019, 117, 191–200. [Google Scholar] [CrossRef]
- Hoffer, N.V.; Coopmans, C.; Jensen, A.M.; Chen, Y. A survey and categorization of small low-cost unmanned aerial vehicle system identification. J. Intell. Robot. Syst. 2014, 74, 129–145. [Google Scholar] [CrossRef]
- Sierra, J.E.; Santos, M. Modelling engineering systems using analytical and neural techniques: Hybridization. Neurocomputing 2018, 271, 70–83. [Google Scholar] [CrossRef]
- Stevens, B.L.; Lewis, F.L.; Johnson, E.N. Aircraft Control and Simulation: Dynamics, Controls Design, and Autonomous Systems; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ARX | ARMAX | BJ | OE | SS | NLARX | ||
|---|---|---|---|---|---|---|---|---|
| TP | WL | NN | ||||||
| FPE | 0.00257 | 0.0022 | 0.00868 | 2.611 | 0.0037 | - | 0.002688 | - |
| MSE | 0.6356 | 0.635 | 0.8518 | 16.29 | 0.74 | 3.998 | 0.643 | 0.6545 |
| 89% | 88.04% | 88.62% | 1.854% | 87.46% | 63.16% | 88.74% | 87.7% | |
| 80.68% | 81.76% | 74.75% | −19.5% | 66.5% | 12.57% | 73.85% | 77.02% | |
| 82.87% | 83.48% | 78.23% | −173.2% | 88.95% | −21.28% | 82.08% | 81.79% | |
| Coeff. | 210 | 135 | 72 | 105 | 102 | - | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fatima, S.K.; Abbas, M.; Mir, I.; Gul, F.; Mir, S.; Saeed, N.; Alotaibi, A.A.; Althobaiti, T.; Abualigah, L. Data Driven Model Estimation for Aerial Vehicles: A Perspective Analysis. Processes 2022, 10, 1236. https://doi.org/10.3390/pr10071236
Fatima SK, Abbas M, Mir I, Gul F, Mir S, Saeed N, Alotaibi AA, Althobaiti T, Abualigah L. Data Driven Model Estimation for Aerial Vehicles: A Perspective Analysis. Processes. 2022; 10(7):1236. https://doi.org/10.3390/pr10071236
Chicago/Turabian StyleFatima, Syeda Kounpal, Manzar Abbas, Imran Mir, Faiza Gul, Suleman Mir, Nasir Saeed, Abdullah Alhumaidi Alotaibi, Turke Althobaiti, and Laith Abualigah. 2022. "Data Driven Model Estimation for Aerial Vehicles: A Perspective Analysis" Processes 10, no. 7: 1236. https://doi.org/10.3390/pr10071236