
Development of a Love-Wave Biosensor Based on an Analytical Model

 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
2. Analytical Model of the Love-Wave Structure
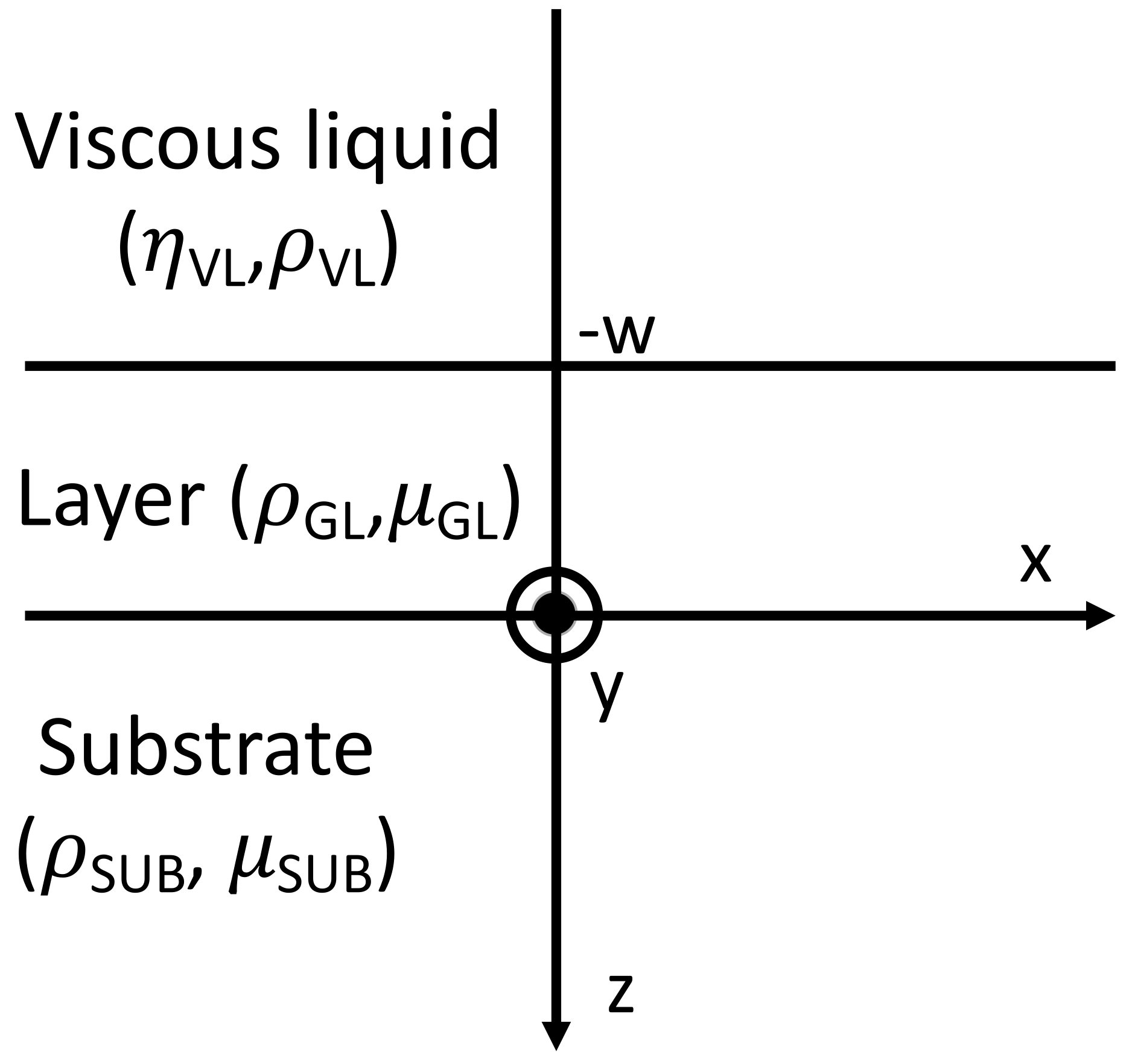
2.1. Physical Formulation of the Problem
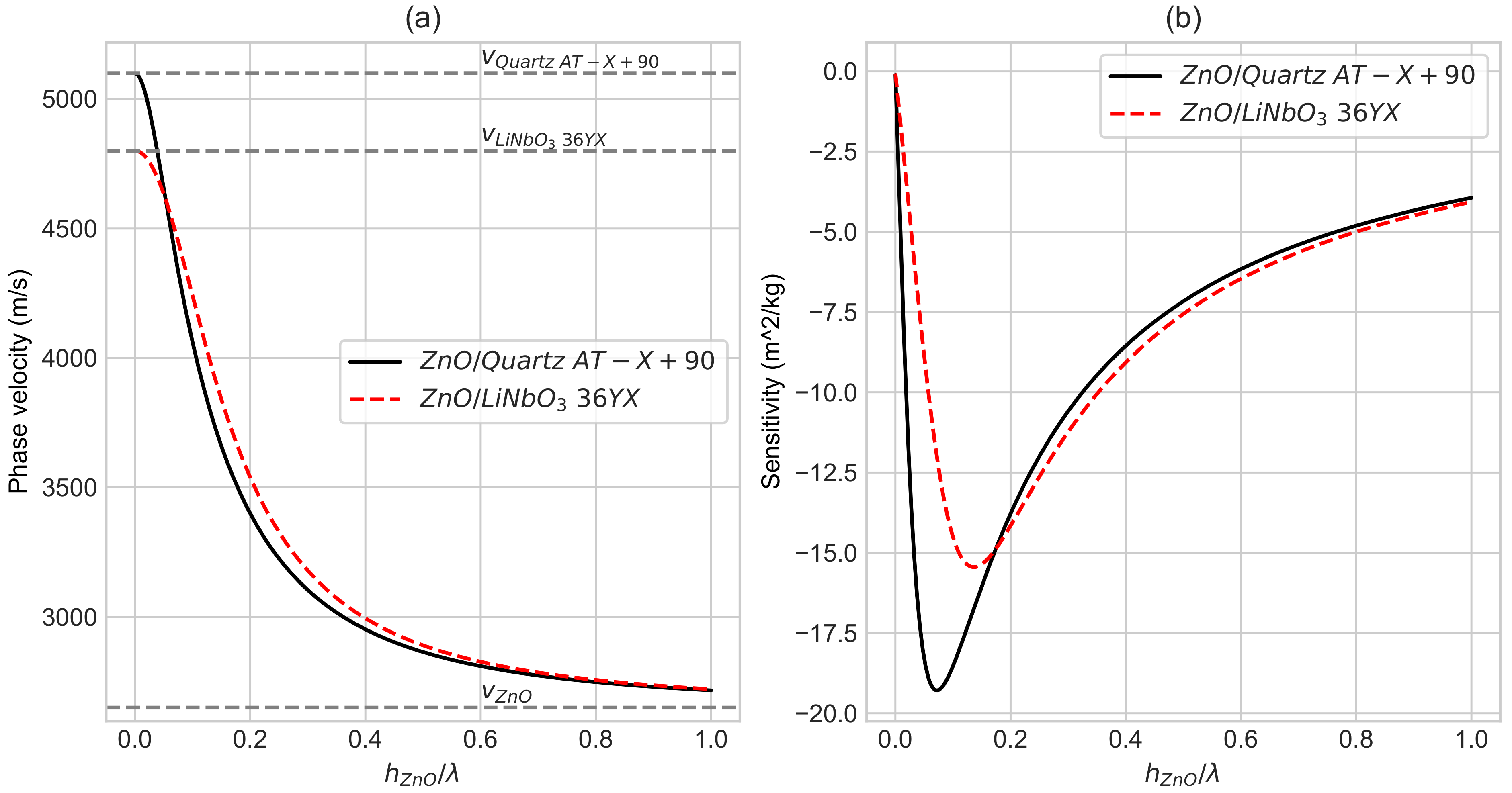
2.2. Results
3. Love SAW Biosensors
3.1. L-SAW Development
- and substrates (1 mm thick)
- Interdigital transducers (UV photolithography, 10 nm Ti + 100 nm Au, periodicity = 40 m), SPLIT fingers
- ZnO GL (RF magnetron sputtering process, highly oriented c-axis, ≈2.8 m and ≈4.9 m thick, respectively)
- Sensitive gold area on top of the GL (10 nm Ti + 50 nm Au).
- Velocity: = 4364 ms, = 3932 ms.
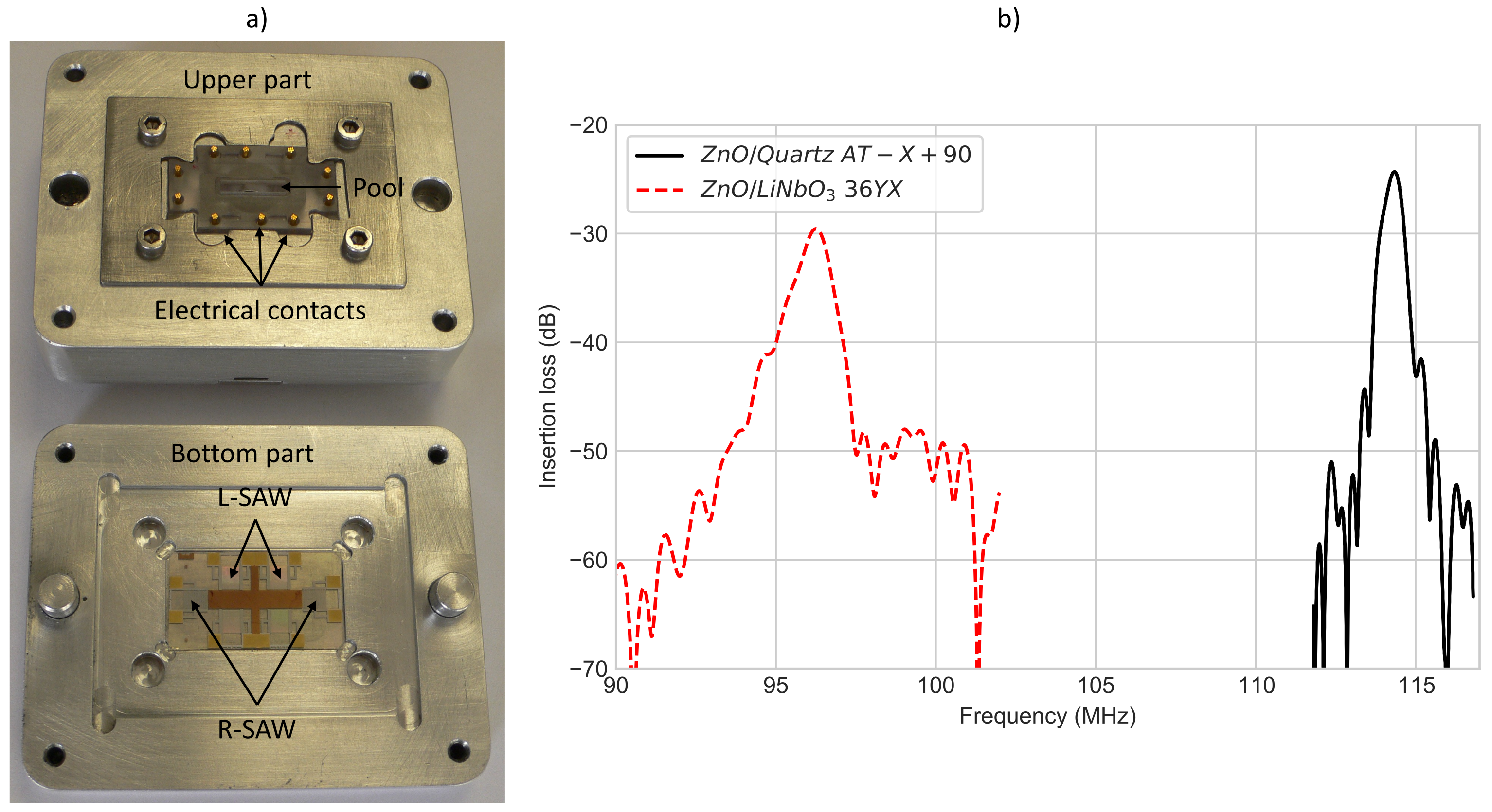
- Operating frequency: = 114.33 MHz, = 96.25 MHz.
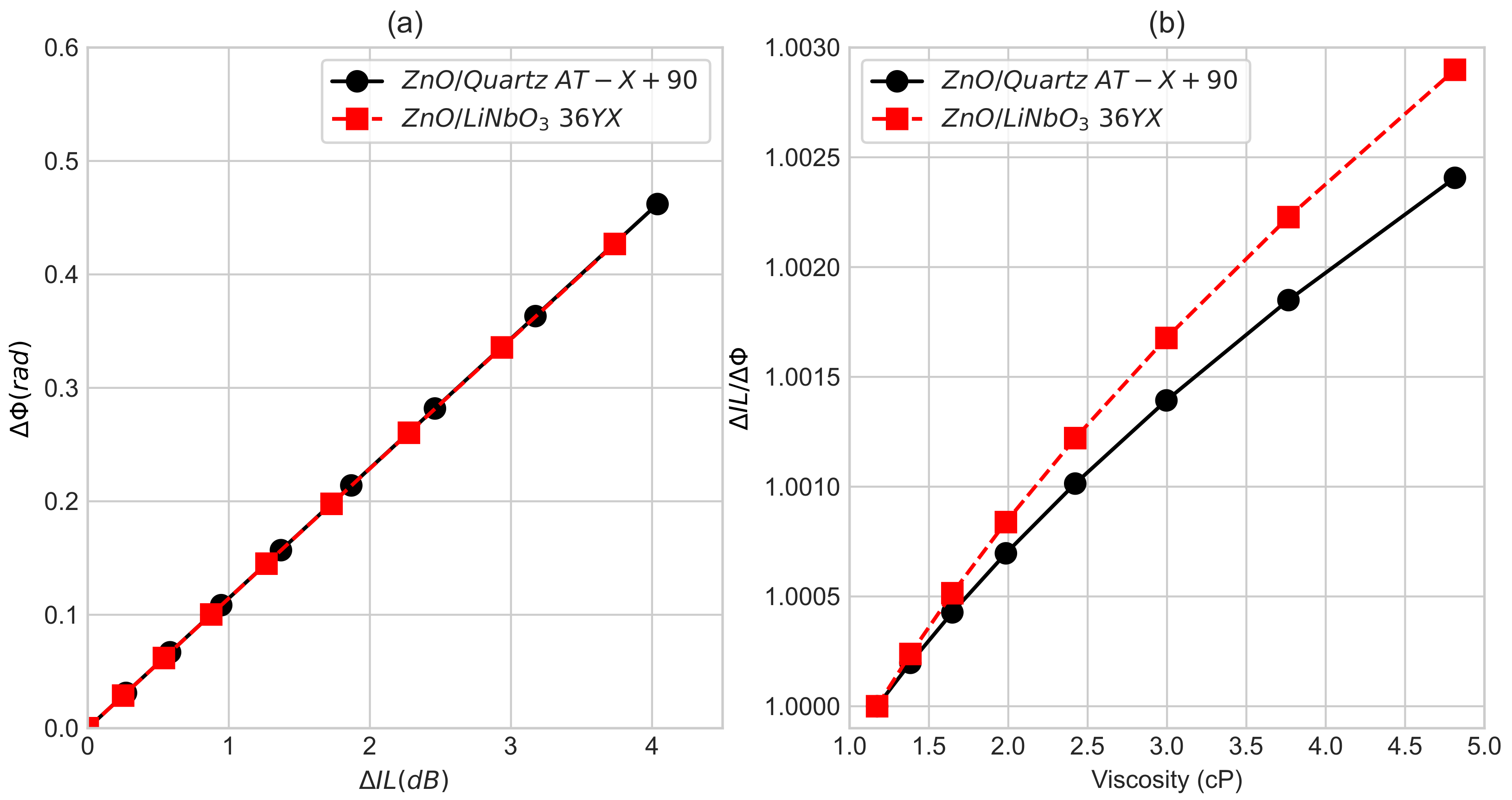
3.2. Biosensors Responses
4. Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Biosensors Market. Available online: https://www.marketsandmarkets.com/Market-Reports/biosensors-market-798.html (accessed on 17 January 2022).
- El Kaffas, A.; Bekah, D.; Rui, M.; Kumaradas, J.C.; Kolios, M.C. Investigating Longitudinal Changes in the Mechanical Properties of MCF-7 Cells Exposed to Paclitaxol Using Particle Tracking Microrheology. Phys. Med. Biol. 2013, 58, 923–936. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Darling, E.M.; Zauscher, S.; Block, J.A.; Guilak, F. A Thin-Layer Model for Viscoelastic, Stress-Relaxation Testing of Cells Using Atomic Force Microscopy: Do Cell Properties Reflect Metastatic Potential? Biophys. J. 2007, 92, 1784–1791. [Google Scholar] [CrossRef] [Green Version]
- Rebelo, L.M.; de Sousa, J.S.; Mendes Filho, J.; Radmacher, M. Comparison of the Viscoelastic Properties of Cells from Different Kidney Cancer Phenotypes Measured with Atomic Force Microscopy. Nanotechnology 2013, 24, 055102. [Google Scholar] [CrossRef] [PubMed]
- Plaza, G.R.; Marí, N.; Gálvez, B.G.; Bernal, A.; Guinea, G.V.; Daza, R.; Pérez-Rigueiro, J.; Solanas, C.; Elices, M. Simple Measurement of the Apparent Viscosity of a Cell from Only One Picture: Application to Cardiac Stem Cells. Phys. Rev. E 2014, 90, 052715. [Google Scholar] [CrossRef] [PubMed]
- Wang, K.; Sun, X.H.; Zhang, Y.; Zhang, T.; Zheng, Y.; Wei, Y.C.; Zhao, P.; Chen, D.Y.; Wu, H.A.; Wang, W.H.; et al. Characterization of Cytoplasmic Viscosity of Hundreds of Single Tumour Cells Based on Micropipette Aspiration. R. Soc. Open Sci. 2019, 6, 181707. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nikhil, B.; Pawan, J.; Nello, F.; Pedro, E. Introduction to Biosensors. Essays Biochem. 2016, 60, 1–8. [Google Scholar]
- Kuo, P.L.; Charng, C.C.; Wu, P.C.; Li, P.C. Shear-Wave Elasticity Measurements of Three-Dimensional Cell Cultures for Mechanobiology. J. Cell Sci. 2017, 130, 292–302. [Google Scholar] [CrossRef] [Green Version]
- Mitsakakis, K.; Tsortos, A.; Gizeli, E. Quantitative Determination of Protein Molecular Weight with an Acoustic Sensor; Significance of Specific versus Non-Specific Binding. Analyst 2014, 139, 3918–3925. [Google Scholar] [CrossRef]
- Hashimoto, K.Y. Surface Acoustic Wave Devices in Telecommunications; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Aubert, T.; Sarry, F.; Elmazria, O.; Assouar, B.; Bouvot, L.; Nicolay, P. High Temperature Pt/LGS SAW Sensor: From Theory to Experiment. Sensors 2011, 2011, 1632–1635. [Google Scholar]
- Bonhomme, J.; Oudich, M.; Segura Chavez, P.A.; Bellaredj, M.L.F.; Bryche, J.F.; Beyssen, D.; Charette, P.G.; Sarry, F. Numerical Characterization of Love Waves Dispersion in Viscoelastic Guiding-Layer under Viscous Fluid. J. Appl. Phys. 2020, 128, 154502. [Google Scholar] [CrossRef]
- Gigodot, A. Stimulation Cellulaire de Monocytes THP-1 par Ondes Élastiques de Surface—Cytotoxicité et Transcriptomique; Technical Report; Université Technologique de Compiègne: Compiègne, France, 2021. [Google Scholar]
- McHale, G.; Newton, M.I.; Martin, F. Theoretical Mass, Liquid, and Polymer Sensitivity of Acoustic Wave Sensors with Viscoelastic Guiding Layers. J. Appl. Phys. 2003, 93, 675–690. [Google Scholar] [CrossRef]
- Kiełczynski, P.; Szalewski, M.; Balcerzak, A.; Wieja, K. Dispersion Curves of Love Waves in Elastic Waveguides Loaded with a Newtonian Liquid Layer of Finite Thickness. Arch. Acoust. 2020, 45, 19–27. [Google Scholar]
- Campbell, J.; Jones, W. A Method for Estimating Optimal Crystal Cuts and Propagation Directions for Excitation of Piezoelectric Surface Waves. IEEE Trans. Sonics Ultrason. 1968, 15, 209–217. [Google Scholar] [CrossRef]
- Sarry, F.; Segura Chavez, P.A.; Bonhomme, J.; Olive, L.; Beyssen, D.; Oudich, M.; Charette, P.G. Love wave biosensor to diagnose modification of cell viscoelasticy. Sensors 2011, 2019, 1–4. [Google Scholar]
- Weiss, M.; Welsch, W.; Schickfus, M.; Hunklinger, S. Viscoelastic Behavior of Antibody Films on a Shear Horizontal Acoustic Surface Wave Sensor. Anal. Chem. 1998, 70, 2881–2887. [Google Scholar] [CrossRef] [PubMed]
- Mitsakakis, K.; Tsortos, A.; Kondoh, J.; Gizeli, E. Parametric Study of SH-SAW Device Response to Various Types of Surface Perturbations. Sens. Actuator Chem. 2009, 138, 408–416. [Google Scholar] [CrossRef]
- Auld, B.A. Acoustic Fields and Waves in Solids; Wiley: New York, NY, USA, 1973. [Google Scholar]
- Moreira, F.; Sarry, F.; Nicolas-Debarnot, D.; Elmazria, O.; Poncin-Epaillard, F. PANI/ZnO/Quartz Structure for Love Wave Gas Sensor. Eur. Phys. J. Appl. Phys. 2009, 47, 12702. [Google Scholar] [CrossRef] [Green Version]
- Kadota, M. Surface Acoustic Wave Characteristics of a ZnO/Quartz Substrate Structure Having a Large Electromechanical Coupling Factor and a Small Temperature Coefficient. Jpn. J. Appl. Phys. 1997, 36, 3076. [Google Scholar] [CrossRef]
- Mengue, P.; Hage-Ali, S.; Zhgoon, S.; Paulmier, B.; Floer, C.; Bartoli, F.; Elmazria, O. Direct Integration of SAW Resonators on Industrial Metal for Structural Health Monitoring Applications. Smart Mater. Struct. 2021, 30, 125009. [Google Scholar] [CrossRef]
- Talbi, A.; Sarry, F.; Le Brizoual, L.; Elmazria, O.; Alnot, P. Sezawa Mode SAW Pressure Sensors Based on ZnO/Si Structure. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2004, 51, 1421–1426. [Google Scholar] [CrossRef]
- Roux-Marchand, T.; Beyssen, D.; Sarry, F.; Elmazria, O. Temperature uniformity of microdroplet heated by Rayleigh Surface Acoustic Wave in view of biological reaction. In Proceedings of the 2013 IEEE International Ultrasonics Symposium (IUS), Prague, Czech Republic, 21–25 July 2013; pp. 1885–1888. [Google Scholar]
- Wu, H.; Xiong, X.; Zu, H.; Wang, J.H.C.; Wang, Q.M. Theoretical Analysis of a Love Wave Biosensor in Liquid with a Viscoelastic Wave Guiding Layer. J. Appl. Phys. 2017, 121, 054501. [Google Scholar] [CrossRef]
- Furniss, J.; Qin, L.; Ng, S.; Voiculescu, I.; Li, F. Love Mode Surface Acoustic Wave and Impedance Sensors for Water Toxicity Sensing. Environ. Prog. Sustain. Energy 2018, 37, 172–179. [Google Scholar] [CrossRef]
- Ricco, A.J.; Martin, S.J. Acoustic Wave Viscosity Sensor. Appl. Phys. Lett. 1987, 50, 1474–1476. [Google Scholar] [CrossRef]
- Nomura, T.; Saitoh, A.; Horikoshi, Y. Measurement of acoustic properties of liquid using liquid flow SH-SAW sensor system. Sens. Actuator Chem. 2001, 76, 69–73. [Google Scholar] [CrossRef]
- Goto, M.; Yatsuda, H.; Kondoh, J. Numerical Analysis of Viscosity Effect on Shear Horizontal Surface Acoustic Wave for Biosensor Application. IEEJ Trans. Sens. Micromach. 2016, 136, 1–5. [Google Scholar] [CrossRef]
- Cheng, N.S. Formula for the Viscosity of a Glycerol-Water Mixture. Ind. Eng. Chem. Res. 2008, 47, 3285–3288. [Google Scholar] [CrossRef]
- Jakoby, B.; Vellekoop, M.J. Viscosity Sensing Using a Love-Wave Device. Sens. Actuators Phys. 1998, 68, 275–281. [Google Scholar] [CrossRef]
- Mitsakakis, K.; Tserepi, A.; Gizeli, E. Integration of Microfluidics with a Love Wave Sensor for the Fabrication of a Multisample Analytical Microdevice. J. Microelectromech. Syst. 2008, 17, 1010–1019. [Google Scholar] [CrossRef]
- Saha, K.; Bender, F.; Rasmusson, A.; Gizeli, E. Probing the Viscoelasticity and Mass of a Surface-Bound Protein Layer with an Acoustic Waveguide Device. Langmuir 2003, 19, 1304–1311. [Google Scholar] [CrossRef]
- Francis, L.A.; Friedt, J.M.; Zhou, C.; Bertrand, P. In Situ Evaluation of Density, Viscosity, and Thickness of Adsorbed Soft Layers by Combined Surface Acoustic Wave and Surface Plasmon Resonance. Anal. Chem. 2006, 78, 4200–4209. [Google Scholar] [CrossRef] [Green Version]
- Saitakis, M.; Tsortos, A.; Gizeli, E. Probing the Interaction of a Membrane Receptor with a Surface-Attached Ligand Using Whole Cells on Acoustic Biosensors. Biosens. Bioelectron. 2010, 25, 1688–1693. [Google Scholar] [CrossRef] [PubMed]
- Tsortos, A.; Papadakis, G.; Mitsakakis, K.; Melzak, K.A.; Gizeli, E. Quantitative Determination of Size and Shape of Surface-Bound DNA Using an Acoustic Wave Sensor. Biophys. J. 2008, 94, 2706–2715. [Google Scholar] [CrossRef] [PubMed] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target | ZnO ( inch) |
| Gases | 8 sccm |
| 8 sccm | |
| Temperature | 170 C |
| Target power | 150 W |
| Total pressure | mbar |
| Experimental | , | , |
| Simulation | , | , |
| Experimental (; ) | (3.11; 0.47) | (2.41; 0.35) |
| Simulation (; ) | (3.09; 0.35) | (2.86; 0.32) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarry, F.; Bonhomme, J.; Oudich, M.; Segura Chavez, P.A.; Beyssen, D.; Elmazria, O.; Md Arshad, M.K.; Charette, P.G. Development of a Love-Wave Biosensor Based on an Analytical Model. Chemosensors 2022, 10, 81. https://doi.org/10.3390/chemosensors10020081
Sarry F, Bonhomme J, Oudich M, Segura Chavez PA, Beyssen D, Elmazria O, Md Arshad MK, Charette PG. Development of a Love-Wave Biosensor Based on an Analytical Model. Chemosensors. 2022; 10(2):81. https://doi.org/10.3390/chemosensors10020081
Chicago/Turabian StyleSarry, Frédéric, Jeremy Bonhomme, Mourad Oudich, Pedro Alberto Segura Chavez, Denis Beyssen, Omar Elmazria, Mohd Khairuddin Md Arshad, and Paul G. Charette. 2022. "Development of a Love-Wave Biosensor Based on an Analytical Model" Chemosensors 10, no. 2: 81. https://doi.org/10.3390/chemosensors10020081