Two-Level Finite Element Approximation for Oseen Viscoelastic Fluid Flow


Abstract
1. Introduction
2. Model Equations
Model Problem
3. The Weak Derivative and Finite Element Discretization
4. Two-Level Algorithm’s Existence and Uniqueness, Error Analysis of Oseen Viscoelastic Fluid Flow Model
4.1. Two-Level Method for Steady State Viscoelastic Fluid Flow Model
4.2. Two-Level Method for Oseen Viscoelastic Fluid Flow
4.3. Existence and Uniqueness of the Finite Element Solution
4.4. Error Analysis
5. Numerical Tests
5.1. Analytic Solution Test
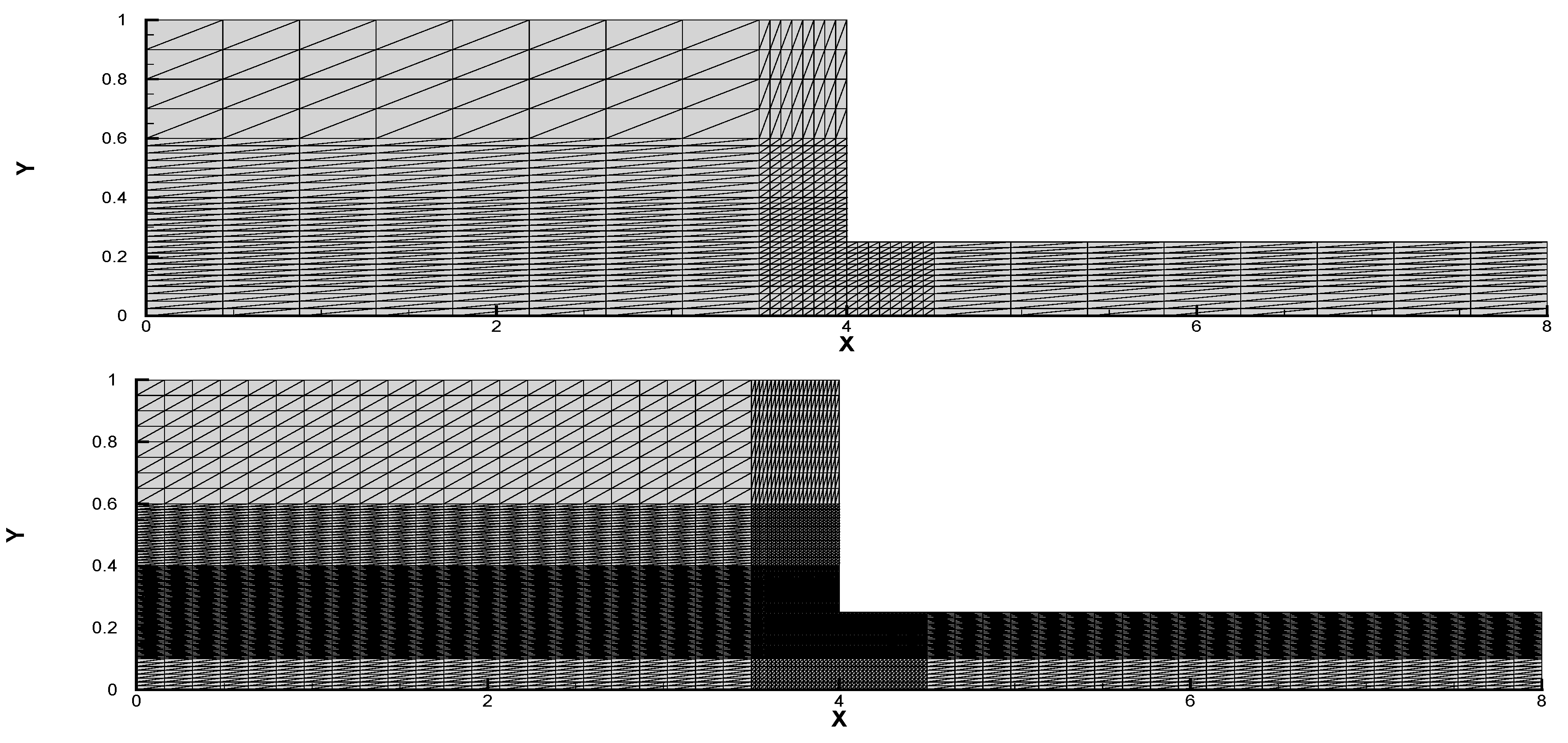
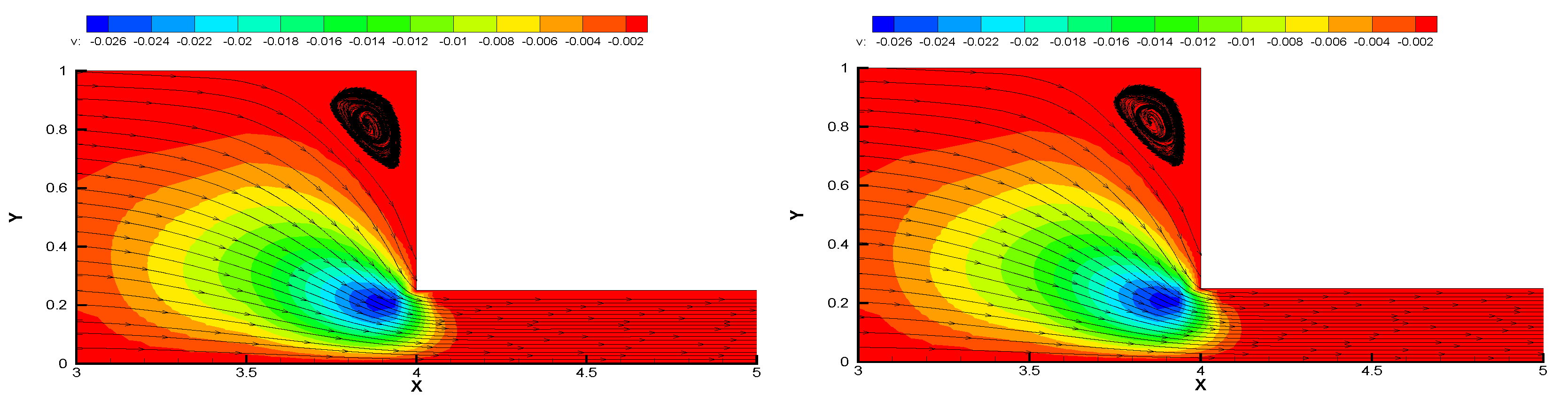
5.2. 4:1 Contraction Channel Flow
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Oldroyd, J.G. On the formuation of rheological equations of state. Proc. R. Soc. Lond. A 1950, 200, 523–541. [Google Scholar] [CrossRef]
- Ervin, V.J.; Lee, H.K.; Ntasin, L.N. Analysis of the Oseen-viscoelastic fluid flow problem. J. Non-Newton. Fluid Mech. 2005, 127, 157–168. [Google Scholar] [CrossRef]
- Reed, W.H.; Hill, T.R. Triangular Mesh Methods for the Neutron Transport Equation; Tech. Report LA-UR-73-479; Los Alamos Scientific Laboratory: Los Alamos, NM, USA, 1973.
- Lesaint, P.; Raviart, P.A. On a finite element method for solving the neutron transport equation. In Mathematical Aspects of Finite Elements in Partial Differential Equations; de Boor, C., Ed.; Academic Press: Cambridge, MA, USA, 1974; pp. 89–123. [Google Scholar]
- Fortin, M.; Fortin, A. A new approach for the FEM simulation of viscoelastic flows. J. Non-Newton. Fluid Mech. 1989, 32, 295–310. [Google Scholar] [CrossRef]
- Fortin, A.; Zine, A.; Agassant, J.F. Computing viscoelastic fluid flow problems at low cost. J. Non-Newton. Fluid Mech. 1992, 45, 209–229. [Google Scholar] [CrossRef]
- Baranger, J.; Sandri, D. Finite element approximation of viscoelastic fluid flow: Existence of approximate solutions and error bounds. Numer. Math. 1992, 63, 13–27. [Google Scholar] [CrossRef]
- Najib, K.; Sandri, D. On a decoupled algorithm for solving a finite element problem for the approximation of viscoelastic fluid flow. Numer. Math. 1995, 72, 223–238. [Google Scholar] [CrossRef]
- Sandri, D. Finite element approximation of viscoelastic fluid flow: Existence of approximate solutions and error bounds. Continuous approximation of the stress. SIAM J. Numer. Anal. 1994, 31, 362–377. [Google Scholar] [CrossRef]
- Ervin, V.J.; Miles, W.W. Approximation of time-dependent viscoelastic fluid flow: SUPG approximation. SIAM J. Numer. Anal. 2003, 41, 457–486. [Google Scholar] [CrossRef]
- Ervin, V.J.; Miles, W.W. Approximation of time-dependent, multi-component, viscoelastic fluid flow. Comput. Methods Appl. Mech. Eng. 2005, 194, 2229–2255. [Google Scholar] [CrossRef][Green Version]
- Jenkins, E.; Lee, H. A domain decomposition method for Oseen-viscoelastic flow equations. Appl. Math. Comput. 2008, 195, 127–141. [Google Scholar] [CrossRef]
- Ervin, V.J.; Lee, H. Defect correction method for viscoelastic fluid flows at high Weissenberg number. Numer. Methods Part. Differ. Equ. 2006, 22, 145–164. [Google Scholar] [CrossRef]
- Wang, A.; Zhao, X.; Qin, P.; Xie, D. An Oseen two level stabilized mixed finite element method for the 2D/3D stationary Navier-Stokes equations. Abstr. Appl. Anal. 2012, 2012, 520818. [Google Scholar] [CrossRef]
- Medvidova, M.L.; Mizerova, H.; Notsu, H.; Tabata, M. Numerical analysis of the Oseen-type Peterlin viscoelastic model by the stabilized Lagrange-Galerkin method Part II: A nonlinear scheme. Math. Model. Numer. Anal. SMAI 1999, 51, 1663–1689. [Google Scholar] [CrossRef]
- Xu, J. Two-Grid discretization techniques for linear and nonlinear PDEs. SIAM J. Numer. Anal. 1996, 33, 1759–1778. [Google Scholar] [CrossRef]
- Layton, W.; Tobiska, L. A two-level method with backtracking for the Navier-Stokes equations. SIAM J. Numer. Anal. 1998, 35, 2035–2054. [Google Scholar] [CrossRef]
- Mu, M.; Xu, J. A two grid method of a mixed Stokes-Darcy model for coupling fluid flow with porous media flow. SIAM J. Numer. Anal. 2007, 45, 1801–1813. [Google Scholar] [CrossRef]
- Qin, X.Q.; Dang, F.N.; Gong, C.Q. Two grid method for the characteristic mixed finite element approximations of 2D nonlinear convection diffusion problems. Chin. J. Eng. Math. 2009, 26, 906–916. [Google Scholar]
- Yan, W.J.; Ren, C.F.; Ma, Y.C. Numerical simulation of two grid method for the unsteady Navier-Stokes equations. Chin. J. Eng. Math. 2005, 22, 1026–1030. [Google Scholar]
- Liu, Q.F.; Hou, Y.R. A two-level finite element method for the Navier-Stokes equations based on a new projection. Appl. Math. Model. 2010, 34, 383–399. [Google Scholar] [CrossRef]
- He, Y.N.; Wang, A. A simplified two-level method for the steady Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 2008, 197, 383–399. [Google Scholar] [CrossRef]
- Dai, X.X.; Cheng, X.L. A two-grid method based on Newton iteration for the Navier-Stokes equations. J. Comput. Appl. Math. 2008, 220, 566–573. [Google Scholar] [CrossRef]
- Lee, H. A multigrid method for viscoelastic fluid flow. SIAM J. Numer. Anal. 2004, 42, 109–129. [Google Scholar] [CrossRef]
- Liakos, A.; Lee, H. Two-level finite element discretization of viscoelastic fluid flow. Comput. Methods Appl. Mech. Eng. 2003, 192, 4965–4979. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Hou, Y.R.; Mu, B.Y. A two-grid method based on Newton iteration for viscoelastic fluid flow. Chin. J. Eng. Math. 2012, 29, 117–130. [Google Scholar]
- Zhang, Y.; Hou, Y.; Mu, B. Defect correction method for time-dependent viscoelastic fluid flow. Int. J. Comput. Math. 2011, 88, 1546–1563. [Google Scholar] [CrossRef]
- Baranger, J.; Wardi, S. Numerical analysis of a FEM for a transient viscoelastic flow. Comput. Methods Appl. Mech. Eng. 1995, 125, 171–185. [Google Scholar] [CrossRef]
- Girault, V.; Raviart, P. Finite Element Methods for Navier-Stokes Equations; Springer: Berlin/Heidelberg, Germany, 1986. [Google Scholar]
- Ervin, V.J.; Howell, J.S.; Lee, H. A two-parameter defect-correction method for computation of steady-state viscoelastic fluid flow. Appl. Math. Comput. 2008, 196, 818–834. [Google Scholar] [CrossRef]
- Chrispell, J.C.; Ervin, V.J.; Jenkins, E.W. A fractional step θ-method approximation of time-dependent viscoelastic fluid flow. J. Comput. Appl. Math. 2009, 232, 159–175. [Google Scholar] [CrossRef]
- Hecht, F. FreeFEM++. J. Numer. Math. 2012, 20, 251–265. [Google Scholar] [CrossRef]
- Zheng, H.; Yu, J.; Shan, L. Unconditional error estimates for time dependent viscoelastic fluid flow. Appl. Numer. Math. 2017, 117, 1–17. [Google Scholar] [CrossRef]
- Zhang, Y.; Hou, Y.; Yang, G. A defect-correction method for time-dependent viscoelastic fluid flow based on SUPG formulation. Discret. Dyn. Nat. Soc. 2011, 2011, 689804. [Google Scholar] [CrossRef]
- Comminal, R.; Hattel, J.H.; Alves, M.A.; Spangenberg, J. Vortex behavior of the Oldroyd-B fluid in the 4-1 planar contraction simulated with the stream function-log-confirmation formulation. J. Non-Newton. Fluid Mech. 2016, 237, 1–15. [Google Scholar] [CrossRef]
- Owens, R.G.; Phillips, T.N. Computational Rheology; Imperial College Press: London, UK, 2002. [Google Scholar]
- Marchal, J.M.; Crochet, M.J. Hermitian finite elements for calculating viscoelastic flow. J. Non-Newton. Fluid Mech. 1986, 20, 187–207. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| H | Order | Order | Order | Order | ||||
|---|---|---|---|---|---|---|---|---|
| 0.0121043 | - | 0.153692 | - | 0.160544 | - | 0.679008 | - | |
| 0.0018913 | 2.6780 | 0.049206 | 1.6431 | 0.039237 | 2.0326 | 0.166186 | 2.0306 | |
| 0.00025339 | 2.8999 | 0.014089 | 1.8042 | 0.009757 | 2.0075 | 0.040482 | 2.0374 | |
| 0.000026587 | 3.2525 | 0.003482 | 2.0162 | 0.002458 | 1.9886 | 0.010090 | 2.0043 | |
| 0.000003542 | 2.9080 | 0.000902 | 1.9476 | 0.000627 | 1.9697 | 0.0025218 | 2.0004 | |
| 0.0117976 | - | 0.153040 | - | 0.117092 | - | 0.660409 | - | |
| 0.0017827 | 2.7263 | 0.048192 | 1.6670 | 0.035114 | 1.73752 | 0.163208 | 2.0166 | |
| 0.0002193 | 3.0231 | 0.013344 | 1.8526 | 0.009309 | 1.9152 | 0.040392 | 2.0145 | |
| 0.00002454 | 3.1593 | 0.003363 | 1.9883 | 0.002317 | 2.0062 | 0.010088 | 2.0014 | |
| 0.00000329 | 2.8962 | 0.000868 | 1.9533 | 0.000587 | 1.9806 | 0.002521 | 2.0001 | |
| 0.0120841 | - | 0.153453 | - | 0.119684 | - | 0.650230 | - | |
| 0.0018903 | 2.6763 | 0.048008 | 1.6764 | 0.038849 | 1.6232 | 0.162583 | 1.9997 | |
| 0.0002191 | 3.1083 | 0.013018 | 1.8827 | 0.010598 | 1.8740 | 0.040382 | 2.0093 | |
| 0.00002431 | 3.1724 | 0.003279 | 1.9888 | 0.002624 | 2.0136 | 0.010087 | 2.0011 | |
| 0.00000314 | 2.9513 | 0.000834 | 1.9745 | 0.000638 | 2.0401 | 0.002521 | 2.0001 |
| H | h | Order | Order | Order | Order | ||||
|---|---|---|---|---|---|---|---|---|---|
| 0.0011174 | - | 0.028512 | - | 0.033849 | - | 0.047326 | - | ||
| 0.0001464 | 2.0089 | 0.006602 | 1.4461 | 0.008810 | 1.3305 | 0.008135 | 1.7406 | ||
| 0.00001668 | 2.0341 | 0.001793 | 1.2203 | 0.002180 | 1.3077 | 0.001691 | 1.4707 | ||
| 0.00000216 | 1.9653 | 0.000413 | 1.4115 | 0.000510 | 1.3963 | 0.000406 | 1.3705 | ||
| 0.0016150 | - | 0.036364 | - | 0.031549 | - | 0.045067 | - | ||
| 0.0001714 | 2.2170 | 0.007398 | 1.5740 | 0.007916 | 1.3667 | 0.008142 | 1.6914 | ||
| 0.0000164 | 2.1949 | 0.001858 | 1.2939 | 0.001950 | 1.3118 | 0.001776 | 1.4254 | ||
| 0.00000198 | 2.0320 | 0.000408 | 1.4579 | 0.000433 | 1.4472 | 0.000420 | 1.3854 | ||
| 0.0017902 | - | 0.042179 | - | 0.038437 | - | 0.045171 | - | ||
| 0.0001969 | 2.1816 | 0.008877 | 1.5405 | 0.009659 | 1.3652 | 0.008582 | 1.6417 | ||
| 0.00001953 | 2.1641 | 0.002343 | 1.2472 | 0.002625 | 1.2198 | 0.002022 | 1.3537 | ||
| 0.00000229 | 2.0581 | 0.000492 | 1.5013 | 0.000622 | 1.3846 | 0.000493 | 1.3566 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nasu, N.J.; Mahbub, M.A.A.; Hussain, S.; Zheng, H. Two-Level Finite Element Approximation for Oseen Viscoelastic Fluid Flow. Mathematics 2018, 6, 71. https://doi.org/10.3390/math6050071
Nasu NJ, Mahbub MAA, Hussain S, Zheng H. Two-Level Finite Element Approximation for Oseen Viscoelastic Fluid Flow. Mathematics. 2018; 6(5):71. https://doi.org/10.3390/math6050071
Chicago/Turabian StyleNasu, Nasrin Jahan, Md. Abdullah Al Mahbub, Shahid Hussain, and Haibiao Zheng. 2018. "Two-Level Finite Element Approximation for Oseen Viscoelastic Fluid Flow" Mathematics 6, no. 5: 71. https://doi.org/10.3390/math6050071
APA StyleNasu, N. J., Mahbub, M. A. A., Hussain, S., & Zheng, H. (2018). Two-Level Finite Element Approximation for Oseen Viscoelastic Fluid Flow. Mathematics, 6(5), 71. https://doi.org/10.3390/math6050071