
Criteria on Exponential Incremental Stability of Dynamical Systems with Time Delay


1
School of Mathematical Sciences, Fudan University, Shanghai 200433, China
2
Shanghai Center for Mathematical Sciences, Fudan University, Shanghai 200433, China
3
Shanghai Key Laboratory for Contemporary Applied Mathematics, Shanghai 200433, China
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Mathematics 2023, 11(10), 2242; https://doi.org/10.3390/math11102242
Submission received: 14 April 2023
/
Revised: 7 May 2023
/
Accepted: 8 May 2023
/
Published: 10 May 2023
(This article belongs to the Special Issue Advances in Study of Time-Delay Systems and Their Applications, 2nd Edition)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Incremental stability analysis for time-delay systems has attracted more and more attention for its contemporary applications in transportation processes, population dynamics, economics, satellite positions, etc. This paper researches the criteria for exponential incremental stability for time-delay systems with continuous or discontinuous right-hand sides. Firstly, the sufficient conditions for exponential incremental stability for time-delay systems with continuous right-hand sides are studied, and several corollaries for specific cases are provided. As for time-delay systems with discontinuous right-hand sides, after expounding the relevant conditions for the existence and uniqueness of the Filippov solution, by using approximation methods, sufficient conditions for exponential incremental stability are obtained. The conclusions are applied to linear switched time-delay systems and Hopfield neural network systems with composite right-hand sides.
Keywords:
time-delay system; exponential incremental stability; discontinuous right-hand sides; Filippov solutionsMSC:
34K201. Introduction
Stability analysis in mathematics mainly refers to the relevant research on the long-term performance of the dynamical system’s steady state. With more and more applications of neural networks and complex systems, the stability analysis of differential equations, including time-delay dynamical systems, has attracted more and more attention from academia and industry. Incremental stability [1,2] has been presented to be a perfect instrument for stability analysis, which is able to address problems of synchronization of coupled systems.
Incremental stability means that as time approaches infinity, the solutions of the dynamical system in different initial states will approach each other, that is, the state variables of the system with different initial states will gradually converge to the same trajectory. This property has a very wide range of applications in different fields of academia and industry. In recent years, due to the increasing potential application value in many frontier fields, such as PI-controlled missiles, Ref. [3] as well as the synchronization problem of network dynamics [4,5,6], there is already a lot of literature available on incremental stability, e.g., Refs. [7,8] provided a systematic exposition and discussion of related issues, and Ref. [3] provided specific examples of incremental stability-related applications.
In dynamical system analysis, the theoretical research on differential equations with discontinuous right-hand sides has also been highly valued because of its wide application. In some fields, such as mechanical engineering, electronic engineering, and automatic control theory, many problems rely on relevant theories of these ‘discontinuous’ differential equations [9]. Among them, switched systems, as a type of differential equation with discontinuous right-hand functions, are particularly commonly used in the field of automatic control, thus driving the development of related theories [10,11,12,13].
In 1964, Filippov [14] studied the motion of Coulomb friction oscillators and proposed a differential equation with a discontinuous right-hand side. In order to study the trajectory of the solution, ‘differential inclusion’ and set-valued mapping were introduced, and the existence and uniqueness of the solution of the discontinuous differential equation were discussed. A detailed discussion on this type of discontinuous differential equation can be found in reference [15]. Before we study the compressibility of the system, we need to first ensure the existence and uniqueness of the Carathéodory solution of the system. Filippov’s theory mainly focuses on the existence and uniqueness of the solution of the non-smooth dynamical system. The relevant conclusions have been listed in [15].
Research on time-delay differential equations first began in the early 20th century by Volterra [16,17]. The ordinary differential equations with time delay are commonly used in contemporary applications, gradually pushing the relevant theories of time-delay systems to integrity and maturity and producing rich results. There are many important achievements emerging one after another. It is worth mentioning Hale and Verduyn Lunel’s comprehensive work [18], which discussed in detail the properties of the solutions for some time-delay differential equations, e.g., uniqueness, continuous dependence of parameters, continuity and compactness of solutions, stability and invariance, etc. At the same time, some concrete analyses and methods on the properties of these solutions for time-delay systems were proposed in the literature [19,20,21,22,23], among which, Ref. [20] includes an introductory chapter that provides detailed examples of time-delay differential equations used to control computer systems, transportation processes, population dynamics, economics, satellite positions, urban transportation, and so on.
Set-valued dynamical systems, also named Filippov systems, whose right-hand sides are set-valued mappings, are widely used in these applications mentioned above. These set-valued dynamical systems are perfect instruments to represent the time-delay differential equations with discontinuous right-hand sides [20,24,25,26,27,28] or control systems with time delay [20,29,30]. Therefore, naturally, a large amount of the literature has discussed the problems along these lines. One of the most important achievements in this field is [31], in which Haddad focused on upper semicontinuous dynamics, elaborated on the existence and compactness of the solution set, and also proved the upper semicontinuity of the solution. Haddad’s work [31] is given under functional differential inclusion, where the corresponding time-delay term acts on the infinite-dimensional space of continuous functions.
In recent years, there have been many related analytical studies and achievements on the incremental stability of Filippov systems. In the case that the local Lipschisz condition is satisfied, Ref. [32] provided a sufficient condition for the local stability of Filippov solutions. Ref. [33] used the concept of Filippov solutions to analyze a class of time-delay dynamical systems with discontinuous right-hand sides. In the sense of the Filippov solution, Ref. [34] proposed the conditions for global asymptotic stability of the error system of the time-delay neural network with a discontinuous activation function. While [35] put forward an approximation method and gave the specific sufficient conditions for the exponential incremental stability of the switched system.
In this paper, first, several preliminary definitions are given in Section 2. In Section 3, we research the criteria on the exponential incremental stability of the solutions for time-delay systems with continuous right-hand sides, involving several specific cases, and relevant corollaries are provided. Then, in Section 4, under the hypothesis that the system has a unique solution, we extend the sufficient conditions for exponential incremental stability to the time-delay system with a discontinuous right-hand side in the sense of the Filippov solution by using a sequence of ‘continuous systems’ to approach the corresponding Filippov system. In this section, we also provide the conditions for the existence and uniqueness of the solution for the time-delay dynamical system before stability analysis in Section 4.1. The applications on linear switched systems and Hopfield neural network systems with time delay are given in Section 5, respectively, and corresponding numerical examples are given in Section 6.
2. Preliminaries
Here, we first introduce some primary definitions, including matrix measure and multiple norms, incremental stability property, exponential incremental stability, and so on.
Definition 1
(Definition 1 in [35]). For any real matrix and a given norm , we define the corresponding matrix measure as
The matrix measure above can be considered as the one-sided directional derivative of the induced matrix norm function , evaluated at the point I, in the direction of A.
In the following parts, we will study the incremental stability property of time-delay systems under multiple norms. Here, we also list the definitions of multiple norms with subscript and the corresponding measures. Note that the function is a piecewise right-continuous function.
Definition 2.
For real matrix and the matrix norm , (the corresponding vector measure ), we here define the corresponding matrix measure as follows:
If () exists, then we denote the right (left) limit of the norm at time point t by . We say the norm is continuous at t, if and only if , that is, is right-continuous and left-continuous as well. If there exists , such that holds for all , we say is uniformly equivalent.
Then, we extend the definition for matrix measure in the sense of multiple norms. Consider the time-varying nature of , as follows:
Definition 3
(Definition 3 in [36]). If the following limit exists, the switched matrix measure with respect to vector norm is defined as follows:
where stands for the upper superior.
Remark 1.
The definition of multiple matrix norms can be thought of as matrix norms induced by vector norm : for a matrix A,
This implies that, if is constant over an internal , then it holds that in .
According to the existence of the switched matrix measure, the definition is as follows,
Definition 4
If exists at t, we say the multiple norm is right regular at time t.
According to the ‘right regular’ property, we have the following proposition [36]:
Proposition 1
([36]). If the multiple norm is right regular, then
- 1.
- The multiple norm is right-continuous at time t;
- 2.
- exists at time t.
For a clearer statement in the following part, we define a transaction function between norms and ,
Definition 5.
Function is the transaction function between norms and , satisfying that
Definition 6.
If the function is well-defined for all t and , we say the multiple norm is equivalent for all t.
Here, we consider the following dynamical time-delay system:
where , is the time-delay term, each is a bounded function, , function is an upper continuous staircase function, . The function represents the initial value function, and . Let be the solution of system (1).
Then, we will research the sufficient conditions for incremental stability for time-delay dynamical system (1), which is defined as follows.
We have the following definition for several types of incremental stability (IS):
Definition 7.
Let be the solution of system (1) with the initial time and initial value function . If there exist a function of class , and some norm induced by vector norm , defined as , such that for any initial function ,
then, we say that system (1) is Incrementally Asymptotically Stable (δAS) in the region . If is independent of initial time t, then we say system (1) is Incrementally Uniformly Asymptotically Stable (δUAS). If function is of class , then we say system (1) is Incrementally Uniformly Exponentially Asymptotically Stable (δUEAS).
3. Contraction Theory for Time-Delay Systems
Here, we list the following hypothesis, denoted by Assumption 1, including the Carathéodory condition to guarantee the existence and uniqueness of the solution of the time-delay dynamical system (1) with a continuous right-hand side.
Assumption 1.
Dynamical time-delay system (1) satisfies the following conditions:
- 1.
- is continuously differentiable with respect to x, and continuous with respect to except for the switching time points .
- 2.
- is upper bounded and has a positive lower bound for each k, and , .
- 3.
- is locally Lipschitz.
Thus, under Assumption 1, system (1) has a unique solution. (Refer to the Reference [37] for details.)
Here, we try to research the contraction property for time-delay system (1). First, enlightened by Ref. [38], we prove the following lemma:
Lemma 1.
Assume that is right regular, is a right-continuous staircase function with discontinuities in and holds for any . is continuous, is the initial time, and . For the following time-delay system:
where , is piecewise continuous with respect to t, and the discontinuities belong to , which is a countable set. If there exists a piecewise right-continuous function whose discontinuities belong to , and matrix-valued functions such that
where represents the Dini derivative, and
Then, for each , we have
Proof.
Let . Assume that is strictly increasing at time point , it implies that . There exists j such that , and here we calculate the Dini derivative of ,
in which can be rewritten as
Thus, we have
that is,
Let
then, for , we have
which is contradictory to the hypothesis that is strictly increasing at . Therefore, is decreasing for , that is,
that is,
The lemma is proved. □
With the conclusion in Lemma 1, we can select a proper function , and prove the following theorem for exponential incremental stability property of system (1).
Theorem 1.
Suppose that Assumption 1 holds for time-delay system (1). is a right-continuous staircase function with discontinuities in . Let , and there exist that
- 1.
- A constant ,
- 2.
- Positive constants , ,
- 3.
- for any ,
such that the following conditions hold:
Let , , be piecewise continuous with respect to t, and the discontinuities belong to . There exist matrix-valued functions , , such that
where
and for any ,
where , then system (1) is exponentially incrementally stable.
Proof.
For any initial state , denote the corresponding initial function by , . Here, we define a function as , which is the initial value function of the initial state . Let . is continuous with respect to except for the switching time points , and is continuously differentiable with respect to x, so we have the solution , which is continuously differentiable with respect to . Let , thus we can conclude that is well-defined and continuous. From chain rule, is the solution of the following system:
is well-defined and continuous, with condition (3), from the proof of Lemma 1, select a piecewise right-continuous function whose discontinuities belong to , we have
holds for any . Thus, under the condition (4), we have
then, we have
Therefore, together with the condition (4), we conclude that the time-delay system (1) is incrementally uniformly asymptotically stable:
□
Actually, the key thought of Theorem 1 is replacing the time-delay term with . In some special cases, we can set or for , which infers the following corollaries.
Corollary 1.
Suppose that Assumption 1 holds. is a right-continuous staircase function with discontinuities in . Let , and there exist
- 1.
- A constant ,
- 2.
- Positive constants , ,
- 3.
- for any ,
such that the following conditions hold:
Let , , be piecewise continuous with respect to t, and the discontinuities belong to ,
and for any ,
where , then system (1) is exponentially incrementally stable.
Corollary 2.
Suppose that Assumption 1 holds. is a right-continuous staircase function with discontinuities in . Let , and there exist
- 1.
- A constant ,
- 2.
- Positive constants ,
- 3.
- for any ,
such that the following conditions hold:
Let , , , there exist matrix-valued functions , , such that
where
and for any ,
where , then system (1) is exponentially incrementally stable.
4. Incremental Stability for Time-Delay Dynamical Systems with Discontinuous Right-Hand Sides
Here, we consider the time-delay dynamical systems [39] with discontinuous right-hand sides using multiple norms, formulated as follows:
where , represents the time-delay term. The right-hand function f may be discontinuous with respect to . The solution of the system (5) can be defined as a solution of the following differential inclusion, which is named a (time-delay) Filippov system,
where , is non-negative for , , , the initial function is defined on , and F is a set-valued mapping defined as follows,
where stands for the Lebesgue measure, represents the -neighborhood of with the given vector norm , and represents convex closure.
4.1. Existence and Uniqueness of the Solution
Before the main theorem, the existence and uniqueness of the Cauchy problem of the Filippov system (6) should be proved first. Herein, several of the existing results on dynamical systems without time-delay terms are presented as follows. Readers are referred to [15,37,40] for the details. For some dynamical systems without time-delay terms, formulated as follows,
in which , we have the corresponding Filippov system,
Then, from Definition 4 and 5 in [40]. We have concluded that under the following Assumption 2, it can be guaranteed that system (7) has at least one solution.
Assumption 2
([40]). The set-valued mapping satisfies that for all , is non-empty, bounded, convex, and closed, and F is upper semicontinuous at .
In Assumption 2, ‘upper semicontinuity’ for the set-valued mapping F is defined as follows.
Definition 8
(Section 1, Chapter 2 in [37]). A set-valued mapping is called upper semicontinuous at if and only if for any neighborhood of , , such that , .
Assumption 3.
With respect to a given Euclid norm defined on a n-dimensional space, we have the following hypothesis:
- 1.
- For any , is non-empty, convex, closed in , and set-valued mapping F is upper semicontinuous with respect to .
- 2.
- (Linearly increasing) There exists such thatholds for any . With Gronwall inequality [41], it can easily be seen as equivalent to: there exists such thatholds for any .
- 3.
- Function is continuously differentiable and bounded, with its upper bound and lower bound .
- 4.
- The initial function is measurable.
- 5.
- For any , there exists continuous function , such that holds.
First, we fix a continuous initial function , then select a measurable function such that holds for almost everywhere. For , consider the following differential inclusion [42]:
From Assumption 3, together with Assumption 2 and the conclusion for the existence of the solution of system (8), the inclusion (6) has at least one solution defined in .
Therefore, similarly, the solution can be extended to . Assume, as an inductive step, that the solution x is defined on , for some . Then, one can consider the vector as the initial state of the following differential inclusion,
Then, one can extend to a right neighborhood of , the interval . That is, we have the following lemma,
Lemma 2.
Then, when it comes to the problem of uniqueness, enlightened by Chapter 2, Section 10, Theorem 1 in [15], we similarly research the conditions for uniqueness of the solution of system (6).
Theorem 2.
Suppose that function defined on region is discontinuous on zero measure set M, and there exists an integral function such that holds for any , and almost everywhere. Let , for any satisfying that and ,
Then, under the simplest convex definition (Page 50 in [15]), equation is right-unique on D.
Proof.
If system (5) is a switched system, according to Theorem 2, one can prove the right uniqueness of the solution.
Here, we formulate a switched system with time delay, that is, the right-hand function is switched with respect to .
in which , regions , . All of the regions have non-empty interiors. The discontinuities are composed of several smooth hypersurfaces of dimension . Suppose that is a sequence -dimensional smooth hypersurfaces, , in which , the continuous region of the function f is a sequence of connected regions, whose boundaries are the switching surfaces. Suppose that the switching surfaces never intersect each other. Denote one of the connected continuous region of f by , then it satisfies that
- 1.
- ;
- 2.
- is continuous in ;
- 3.
- holds in ().
in which and are two different regions with their common boundary on .
Take a switched system defined as (10) with , as an example.In the domain G, consider one of the switching hypersurface S, and represent the limiting values of the function at point from the regions and , respectively. and represent the projections of the vectors and onto the normal vector to S directed from to , respectively, at the point .
Together with Theorem 2, according to bimodal time-delay systems, we have the following conclusion:
Theorem 3.
Under the notations defined above, for all and point , if the inequality is fulfilled, then right uniqueness of Filippov solution for the bimodal system (10) (, ) occurs. (Possibly different inequalities for different and t.)
Proof.
We use the conclusion in Theorem 2 to prove Theorem 3 above.
For any point on the switching surface S, and , , which satisfy that , , . Since , and are bounded, this implies that there exist such that
Similar to the proof of Theorem 2 in Chapter 2 in [15], if holds, then
The inequality (12) still holds if vector is substituted with vector , which is in the same direction. Together with (11) and (12), it infers that
That is, if , , , it holds that
Thus, together with Theorem 2, at any point in the domain, right uniqueness of the Filippov solution for system (10) () occurs for . □
4.2. Criteria for Incremental Stability for Filippov Systems with Time Delay
Here, with the conclusions above, we then research the conditions of incremental stability for time-delay systems with discontinuous right-hand sides.
where , is a bounded function with respect to time t, the function is discontinuous with respect to on a zero measure set. is a piecewise right-continuous switched function, with its discontinuities in .
Then, according to the discontinuous right-hand side , with corresponding set-valued mapping , we construct a sequence of functions satisfying the following conditions, denoted by Condition , where :
- 1.
- is continuous and continuously differentiable with respect to , and continuous with respect to . Moreover, satisfies local Lipschitz conditions for .
- 2.
- For each and compact set ,holds, where and represents the Hausdorff metric. and are considered on , where , and so it is with .
- 3.
- For any compact set , there exists measure , defined as , in which represents the Lebesgue measure, q is a measurable function mapping to , such that holds for each and .
Thus, we have the following conclusion on incremental stability of time-delay systems with discontinuous right-hand sides:
Theorem 4.
Suppose that system (13) has a unique solution, and there exists a sequence of functions satisfying Condition . is a right-continuous staircase function with discontinuities in . Let , and suppose that there exist
- 1.
- A constant ,
- 2.
- Positive constants , ,
- 3.
- for any ,
such that the following conditions hold:
Let , , , there exist matrix-valued functions , , such that
where
and for any ,
where , then system (6) is exponentially incrementally stable in Σ for .
Proof.
First, we construct a sequence of functions satisfying Condition , and the corresponding sequence of time-delay system:
in which, according to Condition , satisfy local Lipschitz conditions, so it can be seen that (14) has a unique solution for .
Therefore, from Theorem 1, for each p, system (14) is exponentially incrementally stable.
Denote any two of the solutions of (6) with different initial function and by and . Then, here, try to approximate and by two sequences of solutions of (14), denoted by and , respectively. The initial functions and here are defined for , where .
With satisfying condition , for each given T, , we have and are bounded regarding . It is the same with . Thus, () is uniformly bounded on , and () is uniformly bounded on as well.
Because of Condition 1 in , () is continuous with respect to t. Together with Condition 3 in , we conclude that (), are equicontinuous for .
Here, we present the Arzela–Ascoli lemma (similar to Theorem 2.2 in [43]):
Lemma 3.
(Arzela–Ascoli Lemma) X is a compact set on . If a sequence in is bounded and equicontinuous, then it has a uniformly convergent subsequence.
From Lemma 3, one can find a sub-sequence of and (still denoted by and ) satisfying that ((t)) uniformly converges to a continuous function () on , . For all , one can find a subsequence of such that holds on the interval . Then, by diagonal selection principle, select a new subsequence such that uniformly converges to a continuous function on , . It is the same with , for .
The system has a unique solution. satisfies Lipschitz condition:
where , . Because of norm equivalence, the Lipschitz condition above also holds with other norms defined in . Therefore, () also satisfies the Lipschitz condition, that is, () exists and is bounded and measurable for , .
We then have the conclusion that () weakly converges to () on the space , the demonstrations are as follows.
is dense in the Banach space , which is the conjugate space . Therefore, the following equation
holds for each . Since is bounded for each p, from the Lebesgue-dominant convergence theorem we have
That is, weakly converges to on the space .
With Mazur’s convexity theorem [43], one can find () with () such that converges to almost everywhere on , where . Notice that is in the convex closure of , converges to uniformly. So it is with with , and it is the same with and .
Recall Condition 3 in . For , it holds that
With in the convex closure of , for any , there exists such that for all and , .
Since can be arbitrarily small, it can be seen that with , which infers that the solution of (6) equals to in almost everywhere on . For and , both are continuous because converges to uniformly on , it can be seen that is the solution of (6). So it is with .
Because system (6) has a unique solution, and almost everywhere for . That is, converges to uniformly in , . A similar proof can be applied to and .
For is exponentially incrementally stable from Theorem 1, there exists some and ,
for all and . For each given , let , there exists some with which and hold for , which implies that
This completes the proof. □
Remark 2.
Similar to Theorem 4, Corollary 1 and Corollary 2 can also be extended to discontinuous cases.
5. Applications
In this section, with the conclusion in Theorem 4, the applications to switched time-delay systems and Hopfield time-delay systems are given.
5.1. Linear Switched Time-Delay System
Consider the following linear switched time-delay system:
in which , , is piecewise continuous, bounded matrix-valued functions, whose discontinuities are in . Take a simple bimodal system as an example, with the switching surface .
In order to guarantee the uniqueness of the Filippov solution for system (15), the linear time-delay system satisfies the following hypothesis:
Assumption 4.
The linear time-delay system (15) satisfies:
Under the definitions and Assumption 4 above, from Lemma 2 and Theorem 3, it can be obtained that system (15) has a unique solution.
Assumption 5.
Suppose that in the continuous regions, the right-hand side satisfies the conditions for exponential incremental stability in Theorem 1, which are formulated as follows.
Let , be a right-continuous staircase function with its discontinuous points belonging to , and there exist
- 1.
- A constant ,
- 2.
- Positive constants , ,
- 3.
- for any ,
- 4.
- Matrix satisfying that and ,
such that the following conditions are satisfied:
in which, for ,
and for all ,
where .
Thus, together with Theorem 4, we have the following corollary on incremental stability for bimodal linear time-delay systems.
Corollary 3.
Proof.
With the conclusion in Theorem 4, by constructing a sequence of time-delay systems with continuous right-hand sides satisfying Condition as follows, we can prove the exponential incremental stability property of system (15):
in which is defined as
let and , the partial derivative of the right-hand function with respect to x and are as follows,
Thus, it needs to satisfy
in which
where . That is,
Here, let , we have the following corollary, which is a variant of Corollary 3.
Corollary 4.
Let , and suppose that system (15) satisfies Assumption 4, and there exist
- 1.
- A constant ,
- 2.
- Positive constants , ,
- 3.
- for any ,
such that the following conditions are satisfied:
and for all ,
where . Moreover, in the neighborhood of switching surface S, that is, when , let , if it is satisfied that
holds for and , then the linear switched time-delay system (15) is exponentially incrementally stable.
5.2. Hopfield Neural Network Systems with Time Delay
Consider the following Hopfield neural network system with time delay:
where is the state variable, the time-delay term . For any , , , , is the input vector, , .
Here, we list the following hypothesis, denoted by Condition :
- 1.
- There exists , , such that is continuous and holds for and .
- 2.
- is non-decreasing and non-trivial in any compact set in , and each has only finite discontinuous points. Therefore, in any compact set in , except a finite points , where there exist finite right and left limits and with , is continuous.
- 3.
- is non-decreasing and non-trivial in any compact set in , and each has only finite discontinuous points. Therefore, in any compact set in , except a finite points , where there exist finite right and left limits and with , is continuous.
- 4.
- Here, define a matrix measure for matrix , with respect to vector norm and matrix norm , where . There exists a positive diagonal matrixsuch thatholds for .
Therefore, we have the following corollary:
Corollary 5.
Suppose the system (19) has a unique solution for , and satisfies Condition above. Let , and there exists
- 1.
- Positive piecewise right-continuous function ,
- 2.
- A constant ,
- 3.
- Positive constants ,
- 4.
- for any ,
such that in the continuous regions of g and u,
Let , , and , ,
Proof.
Suppose that system (19) has a unique solution for , then we construct a sequence of ‘continuous systems’ as follows,
where , . For each i, denote one of the discontinuous points of by , and one of the discontinuous point of by .
Function is formulated as follows, if , , and if ,
Function is similarly constructed. It can be seen that when , the function sequence converges to the Filippov differential inclusion of the right-hand side of (19), that is, satisfies Condition . Let , . Here, denote the Jacobi matrix of functions and by matrix and . In the neighborhood of the discontinuous point,
that is, we have
In the continuous regions, the function sequence satisfies (20), and . Meanwhile, in the neighborhood of the discontinuities, together with the condition (21), it holds that,
for . Therefore, if there exists a large enough number , such that for each , ,
holds for . According to Theorems 1 and 4, the time-delay system (19) is exponentially incrementally stable. □
6. Numerical Experiments
6.1. Linear Time-Delay System
Consider a linear switched time-delay system formulated as follows:
where . The switching surface of system (22) is where .
Let and
Here, we first prove that system (22) has a unique solution for . On the switching surface , we have
According to Assumption 4, the uniqueness of the Filippov solution for (22) occurs for . Let and the number represents the floor of time t. So, for ,
where stands for 2-norm. Then, for and ,
and for all ,
6.2. Hopfield Neural Network with Time Delay
Here, we take an example of the Hopfield system with time delay for illustration. The system is formulated as follows,
where is the state vector, is the switched function with respect to time t, takes value between 0 and 1. The parameter matrix are
where , . According to the uniqueness conditions for the Filippov solution of the time-delay system, Lemma 2 and Theorem 3, it can be seen that (23) has a unique solution in compact set .
Here, define the norm with subscript as , , , , then , , , , therefore, let , , , , such that in the continuous region of the right-hand side of system (23), it holds that
As for condition (21), after calculation, we have , ; thus, condition (21) holds for . Moreover, for , we have
7. Conclusions
This paper researches the criteria for incremental stability for time-delay dynamical systems, including systems with continuous right-hand sides and systems with discontinuous right-hand sides, respectively. In this paper, the corresponding sufficient conditions for the exponential incremental stability of solutions for time-delay dynamical systems with continuous right-hand sides are proposed and proved. Before studying sufficient conditions for incremental stability of the systems with discontinuous right-hand sides, we first provide the conditions for the existence and uniqueness of the Filippov solution. Then, by constructing a sequence of systems with continuous right-hand sides and using the approximation method, sufficient conditions for exponential incremental stability of the systems with discontinuous right-hand sides are obtained.
There still needs to be much further work. Our theorem can be helpful for applications in other more complex scenarios and we may propose more corollaries for some more complex systems in the future. Furthermore, we may seek some other approaches to construct “continuous systems” to approximate discontinuous systems.
Author Contributions
Conceptualization, W.L.; methodology, Y.L. and W.L.; software, Y.L.; validation, Y.L. and W.L.; formal analysis, Y.L.; investigation, Y.L.; resources, W.L.; data curation, W.L.; writing—original draft preparation, Y.L.; writing—review and editing, W.L.; visualization, Y.L.; supervision, W.L.; project administration, W.L.; funding acquisition, W.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work is jointly supported by the National Natural Sciences Foundation of China under Grant (No. 62072111), Shanghai Municipal Science and Technology Major Project under Grant 2018SHZDZX01. This work is conducted in joint accordance with the ZJLab and the Science and Technology Commission of Shanghai Municipality (No. 19JC1420101).
Institutional Review Board Statement
This work is conducted in joint accordance with the ZJLab and the Science and Technology Commission of Shanghai Municipality (No. 19JC1420101).
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created.
Acknowledgments
We here thank Hao Qiang for his assistance with some preliminary research.
Conflicts of Interest
The authors declare no conflict of interest.
Notations
| Vector norm with subscript | |
| Matrix norm induced by | |
| Matrix measure induced by | |
| A right-continuous staircase function with respect to t, with switching points belonging to | |
| A piecewise right-continuous function with respect to t, with switching points | |
| The initial time | |
| The upper bound of : | |
| The lower bound of : | |
References
- Pavlov, A.; Pogromsky, A.; Wouw, N.V.D.; Nijmeijer, H. Convergent dynamics, a tribute to Boris Pavlovich Demidovich. Syst. Control Lett. 2004, 52, 257–261. [Google Scholar] [CrossRef]
- Rüffer, B.S. Convergent systems vs. incremental stability. Syst. Control Lett. 2013, 62, 277–285. [Google Scholar] [CrossRef]
- Fromion, V.; Scorletti, G.; Ferreres, G. Nonlinear performance of a PI controlled missile: An explanation. Int. J. Robust Nonlinear Control. IFAC-Affil. J. 1999, 9, 485–518. [Google Scholar] [CrossRef]
- Hamadeh, A.; Stan, G.B.; Sepulchre, R.; Goncalves, J. Global State Synchronization in Networks of Cyclic Feedback Systems. IEEE Trans. Autom. Control 2012, 57, 478–483. [Google Scholar] [CrossRef]
- Russo, G.; Di Bernardo, M. Correction to Section V-B of “Contraction Theory and the Master Stability Function: Linking Two Approaches to Study Synchronization in Complex Networks” [Feb 09 177-181]. Circuits Syst. Express Briefs IEEE Trans. 2014, 61, 915. [Google Scholar] [CrossRef]
- Kim, H.; Persis, C.D. Output synchronization of Lur’e-type nonlinear systems in the presence of input disturbances. IEEE Conf. Decis. Control 2015, 4145–4150. [Google Scholar]
- Promion, V. Some results on the behavior of Lipschitz continuous systems. In Proceedings of the 1997 European Control Conference (ECC), Brussels, Belgium, 1–7 July 1997; pp. 2011–2016. [Google Scholar]
- Lohmiller, W.; Slotine, J.J.E. On contraction analysis for non-linear systems. Automatica 1998, 34, 683–696. [Google Scholar] [CrossRef]
- Andronov, A.A.; Vitt, A.A.; Khaikin, S.E. Vibration Theory; Fizmatgiz: Moscow, Russia, 1959. (In Russian) [Google Scholar]
- Barbashin, E.A. Introduction to Stability Theory; Nauka: Moscow, Russia, 1967. (In Russian) [Google Scholar]
- Neimark, Y.I. Points Mapping Method in the Theory of Nonlinear Vibrations; Nauka: Moscow, Russia, 1972. (In Russian) [Google Scholar]
- Bautin, N.N.; Leontovich, E.A. Methods and Techniques of Qualitative Study of Dynamic Systems in a Plane; Nauka: Moscow, Russia, 1976. (In Russian) [Google Scholar]
- Gelig, A.K.; Leonov, G.A.; Yakubovich, V.A. Stability of Nonlinear Systems with Nonunique Equilibrium State; Nauka: Moscow, Russia, 1978. (In Russian) [Google Scholar]
- Filippov, A. Differential equations with discontinuous right-hand side. Am. Math. Soc. Transl. 1964, 42, 199–231. [Google Scholar]
- Filippov, A.F. Differential Equations with Discontinuous Right-Hand Sides; Kluwer Academic: Boston, MA, USA, 1988. [Google Scholar]
- Volterra, V. Sur la théorie mathématique des phénom enes héréditaires. J. Math. Pures Appl. 1928, 7, 249–298. [Google Scholar]
- Volterra, V. Theorie Mathematique de la Lutte Pour la vie; Gauthier-Villars: Paris, France, 1931. [Google Scholar]
- Hale, J.K.; Lunel, S.V. Introduction to Functional Differential Equations(Applied Mathematical Sciences, 99); Springer: Berlin, Germany, 1993. [Google Scholar]
- Cooke, K.L. Differential—Difference equations. In International Symposium on Nonlinear Differential Equations and Nonlinear Mechanics; Academic Press: Cambridge, MA, USA, 1963; pp. 155–171. [Google Scholar]
- Nihtilä, M.T. Analysis and synthesis of time delay systems: H. Gorechi, S. Fuksa, P. Grabowski and A. Korytowski. Automatica 1991, 27, 1065–1067. [Google Scholar] [CrossRef]
- Kaminogo, T. Kneser’s property and boundary value problems for some retarded functional differential equations. Tohoku Math. J. 1978, 30, 471–486. [Google Scholar] [CrossRef]
- Kaminogo, T. Topological properties of solution mappings in functional differential equations. Nonlinear Anal. Theory Methods Appl. 1997, 30, 871–876. [Google Scholar] [CrossRef]
- Tunç, C. Qualitative properties in nonlinear Volterra integro-differential equations with delay. J. Taibah Univ. Sci. 2017, 11, 309–314. [Google Scholar] [CrossRef]
- Deimling, K. Multivalued Differential Equations; De Gruyter: Berlin, Germany; New York, NY, USA, 1992. [Google Scholar]
- Haddad, T.; Haddad, T. Delay perturbed state-dependent sweeping process. Appl. Anal. 2016, 95, 270–282. [Google Scholar] [CrossRef]
- Marques, M.D.P.M.; Dzonou, R. Dynamics of a particle with friction and delay. Comptes Rendus Mec. 2017, 346, 237–246. [Google Scholar] [CrossRef]
- Pust, L.; Pešek, L. Influence of delayed excitation on vibrations of turbine blades couple. Appl. Comput. Mech. 2013, 7, 39–52. [Google Scholar]
- Smirnov, G.V. Introduction to the Theory of Differential Inclusions; University of Porto: Porto, Portugal, 2002. [Google Scholar]
- Ali, M.; Hou, Z.; Noori, M. Stability and performance of feedback control systems with time delays. Comput. Struct. 1998, 66, 241–248. [Google Scholar] [CrossRef]
- Callender, A.B.; Hartree, D.R.; Porter, A.R. Time-Lag in a Control System. Philos. Trans. R. Soc. A 1936, 235, 415–444. [Google Scholar]
- Haddad, G. Topological properties of the sets of solutions for functional differential inclusions. Nonlinear Anal. Theory Methods Appl. 1981, 5, 1349–1366. [Google Scholar] [CrossRef]
- Bacciotti, A.; Ceragioli, F. Optimal Regulation and Discontinuous Stabilization. IFAC Proc. Vol. 2001, 34, 39–44. [Google Scholar] [CrossRef]
- Lu, W.; Chen, T. Almost periodic dynamics of a class of delayed neural networks with discontinuous activations. Neural Comput. 2008, 20, 1065–1090. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Cao, J. Synchronization control of discontinuous neural networks via approximation. In Proceedings of the 2010 Chinese Control and Decision Conference, Xuzhou, China, 26–28 May 2010; pp. 782–787. [Google Scholar]
- Fiore, D.; Hogan, S.J.; di Bernardo, M. Contraction analysis of switched systems via regularization. Automatica 2016, 73, 279–288. [Google Scholar] [CrossRef]
- Lu, W.; Bernardo, M. Contraction and incremental stability of switched Carathéodory systems using multiple norms. Automatica 2016, 70, 1–8. [Google Scholar] [CrossRef]
- Aubin, J.P.; Bayen, A.M.; Saint-Pierre, P. Viability Theory; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Qiang, H.; Lu, W. The Coupling Mechanism and Dynamic Behavior of Complex Network Systems; Fudan University: Shanghai, China, 2021. [Google Scholar]
- Ortiz-Robinson, N.; Rios, V. Qualitative Properties of the Solution Set for Time-Delayed Discontinuous Dynamics. Set-Valued Var. Anal. 2020, 28, 327–344. [Google Scholar] [CrossRef]
- Liu, B.; Lu, W.; Chen, T. New conditions on synchronization of networks of linearly coupled dynamical systems with non-Lipschitz right-hand sides. Neural Netw. 2012, 25, 5–13. [Google Scholar] [CrossRef]
- Ortiz-Robinson, N.; Rios, V. Forward Euler Solutions and Weakly Invariant Time-Delayed Systems. Abstr. Appl. Anal. 2012, 3, 327–344. [Google Scholar] [CrossRef]
- Forti, M.; Nistri, P.; Papini, D. Global exponential stability and global convergence in finite time of delayed neural networks with infinite gain. IEEE Trans. Neural Netw. 2005, 16, 1449–1463. [Google Scholar] [CrossRef]
- Haddad, G. Monotone viable trajectories for functional differential inclusions. J. Differ. Equ. 1981, 42, 1–24. [Google Scholar] [CrossRef]
Figure 1.
Dynamical trajectories of the solutions for time-delay system (22).
Figure 1.
Dynamical trajectories of the solutions for time-delay system (22).

Figure 2.
A diagram for exponential incremental uniform stability (the error of each segment) of time-delay system (22).
Figure 2.
A diagram for exponential incremental uniform stability (the error of each segment) of time-delay system (22).
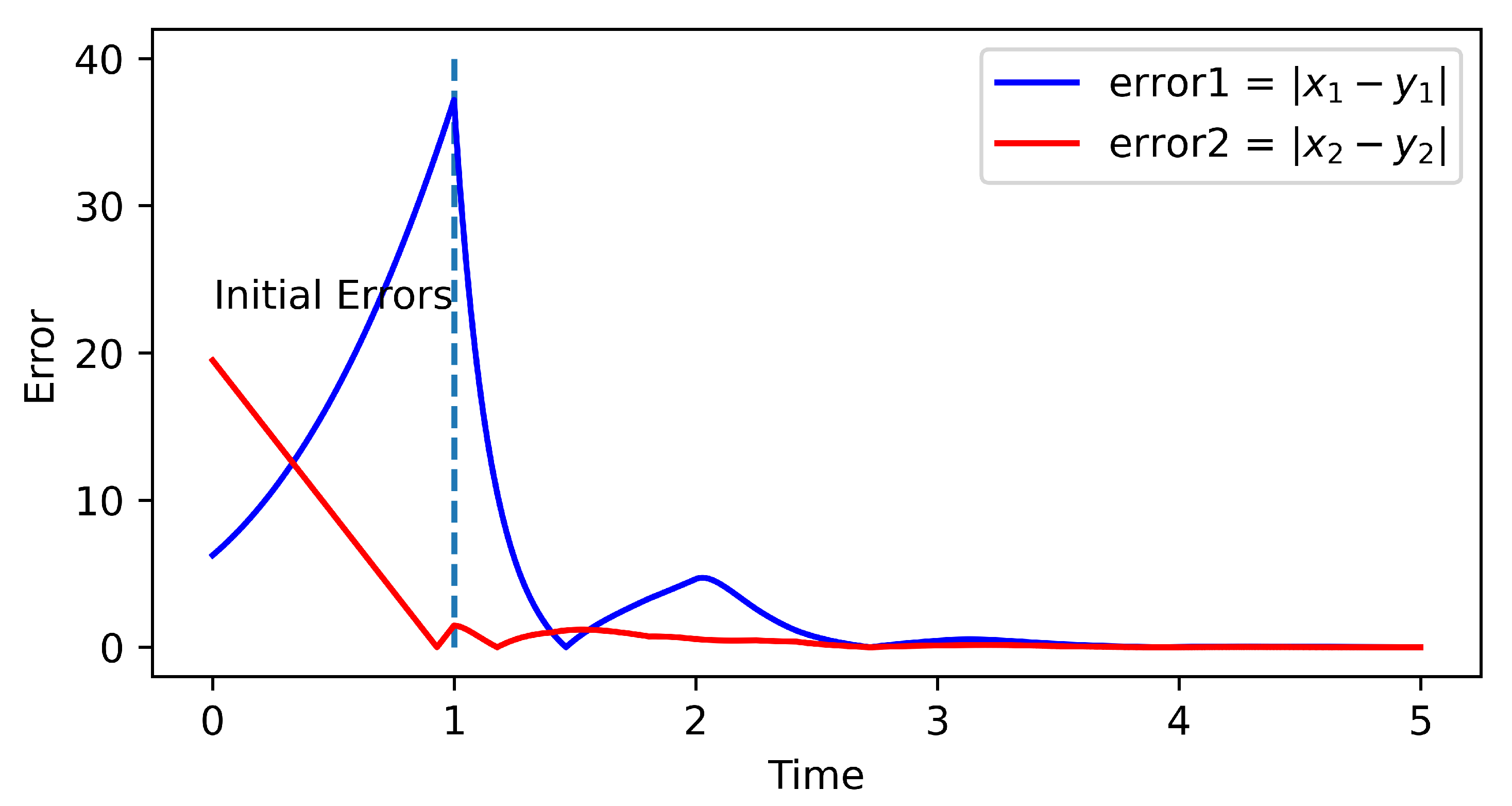
Figure 3.
Dynamical trajectories of the solutions for time-delay system (23).
Figure 3.
Dynamical trajectories of the solutions for time-delay system (23).
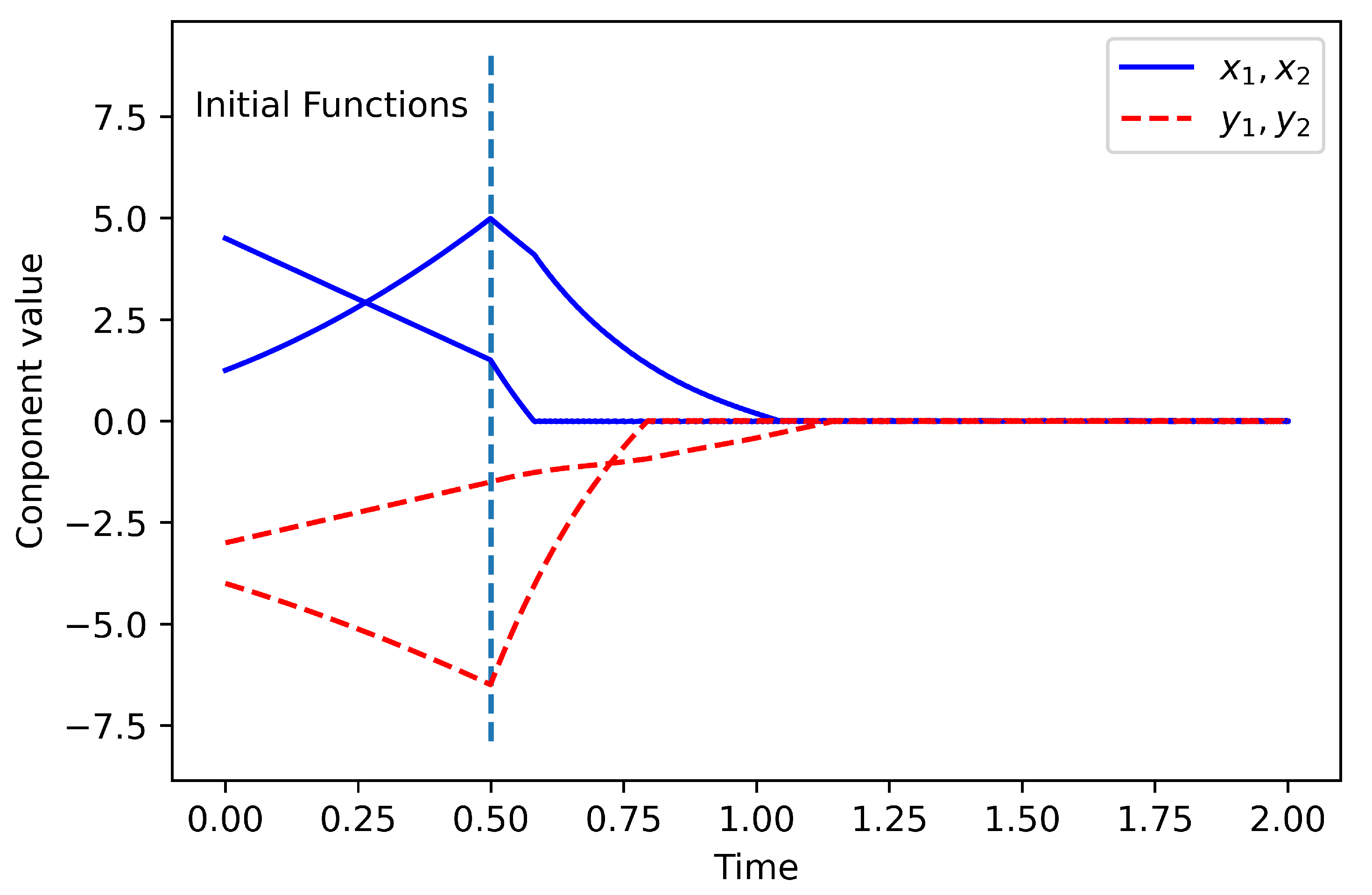
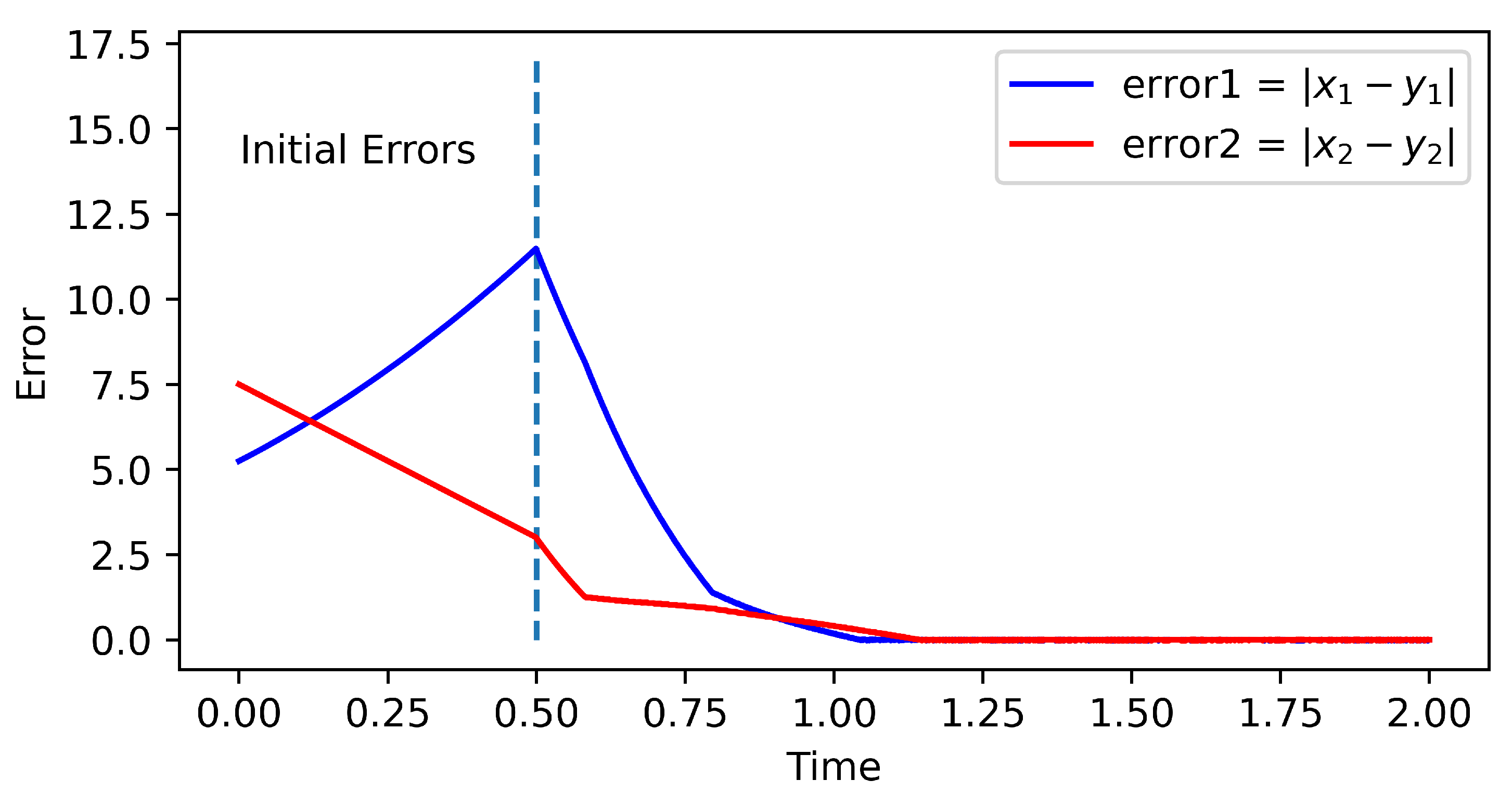
Figure 4.
A diagram for exponential incremental uniform stability (the error of each segment) for system (23).
Figure 4.
A diagram for exponential incremental uniform stability (the error of each segment) for system (23).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Lang, Y.; Lu, W. Criteria on Exponential Incremental Stability of Dynamical Systems with Time Delay. Mathematics 2023, 11, 2242. https://doi.org/10.3390/math11102242
AMA Style
Lang Y, Lu W. Criteria on Exponential Incremental Stability of Dynamical Systems with Time Delay. Mathematics. 2023; 11(10):2242. https://doi.org/10.3390/math11102242
Chicago/Turabian StyleLang, Yingying, and Wenlian Lu. 2023. "Criteria on Exponential Incremental Stability of Dynamical Systems with Time Delay" Mathematics 11, no. 10: 2242. https://doi.org/10.3390/math11102242
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.