Early theoretical studies of aeroelastic systems with structural freeplay were carried out on analog computers by linearizing the system about the nonlinearity via describing functions or harmonic balance or by time marching integration based on the state-space model. One of the compelling advantages of using harmonic balance or describing functions for aeroelastic systems is that traditional linear analytical tools, such as eigenanalysis, can be used for the determination of system stability while still allowing for the prediction of some nonlinear behavior. However, the response of a true nonlinear system may be dependent on the initial conditions, and the describing function approach does not permit a full exploration of this effect. The dependence on initial conditions and the wide variety of nonlinear behavior exhibited by systems with freeplay show the importance of incorporating this common physical nonlinearity into the theoretical model. In addition, the freeplay nonlinearity will likely have a significant effect on the response of the system to a control law designed for the nominal linear system.
Experimental Model and Measurement System
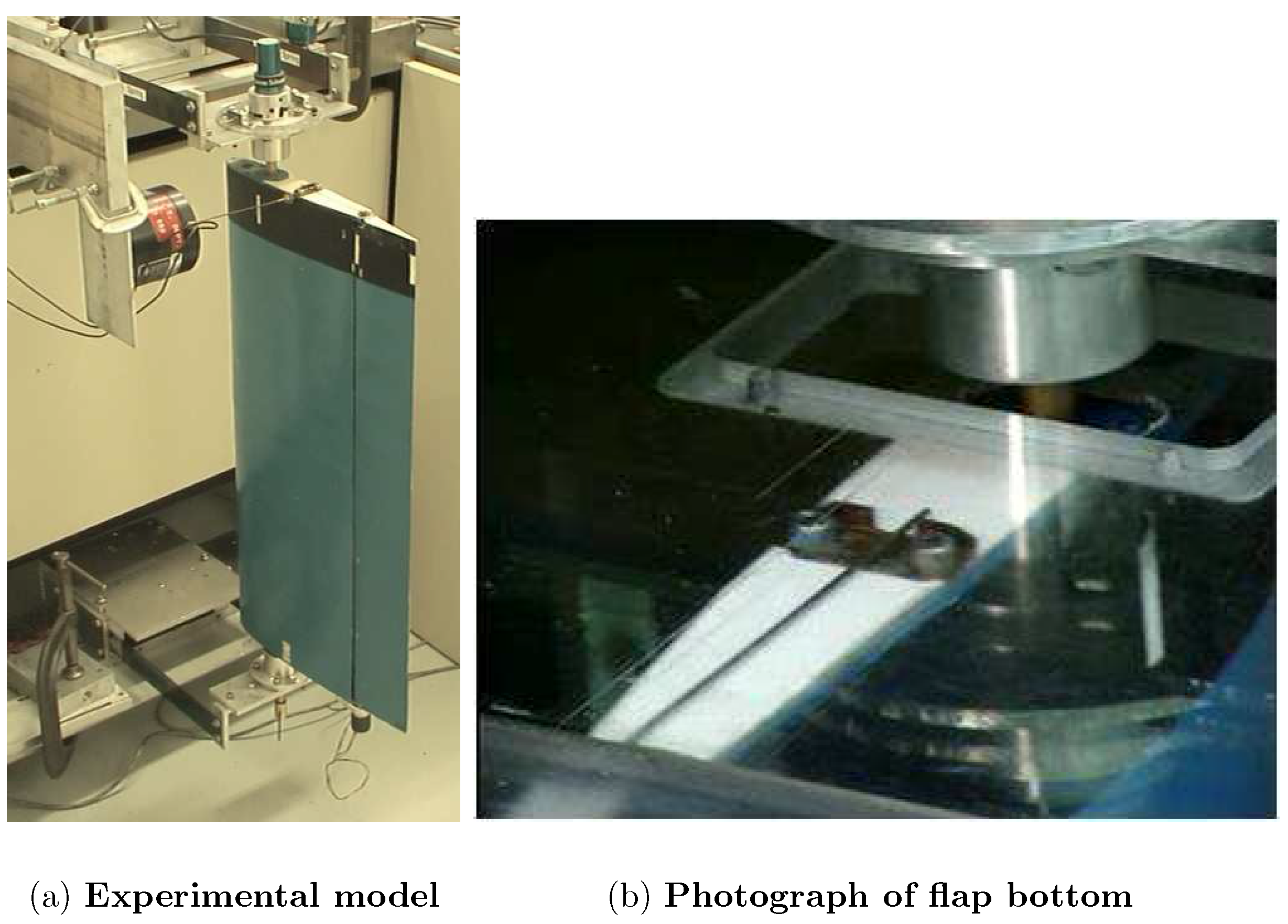
The two-dimensional NACA 0012 rectangular wing model includes two parts: a main wing with a 19 cm chord and 52 cm span; and a flap with a 6.35 cm chord and 52 cm span, which is mounted at the trailing edge of the main wing using two pairs of micro-bearing with a pin. The main wing is constructed from an aluminum alloy circular spar beam with a diameter of 2.54 cm and a wall thickness of 0.32 cm. The beam runs through 14 pieces of NACA 0012 aluminum airfoil plate and serves as the pitch axis, located at the quarter-chord location from the leading edge. A 0.254 mm thick aluminum sheet covers the entire chord and span, providing the aerodynamic contour of the wing. In addition, an aluminum tube with 1.27 cm diameter is mounted from wing tip to wing tip at a location of 3.175 cm from the leading edge. The chordwise center of gravity can be adjusted by adding or subtracting a balance weight from this tube.
The flap is constructed in a similar manner with an aluminum alloy tube spar beam (1.27 cm diameter and 0.158 cm wall-thickness) passed through the leading edge of 14 pieces of NACA 0012 wood airfoil plate. The flap is also covered with the same type of aluminum sheet.
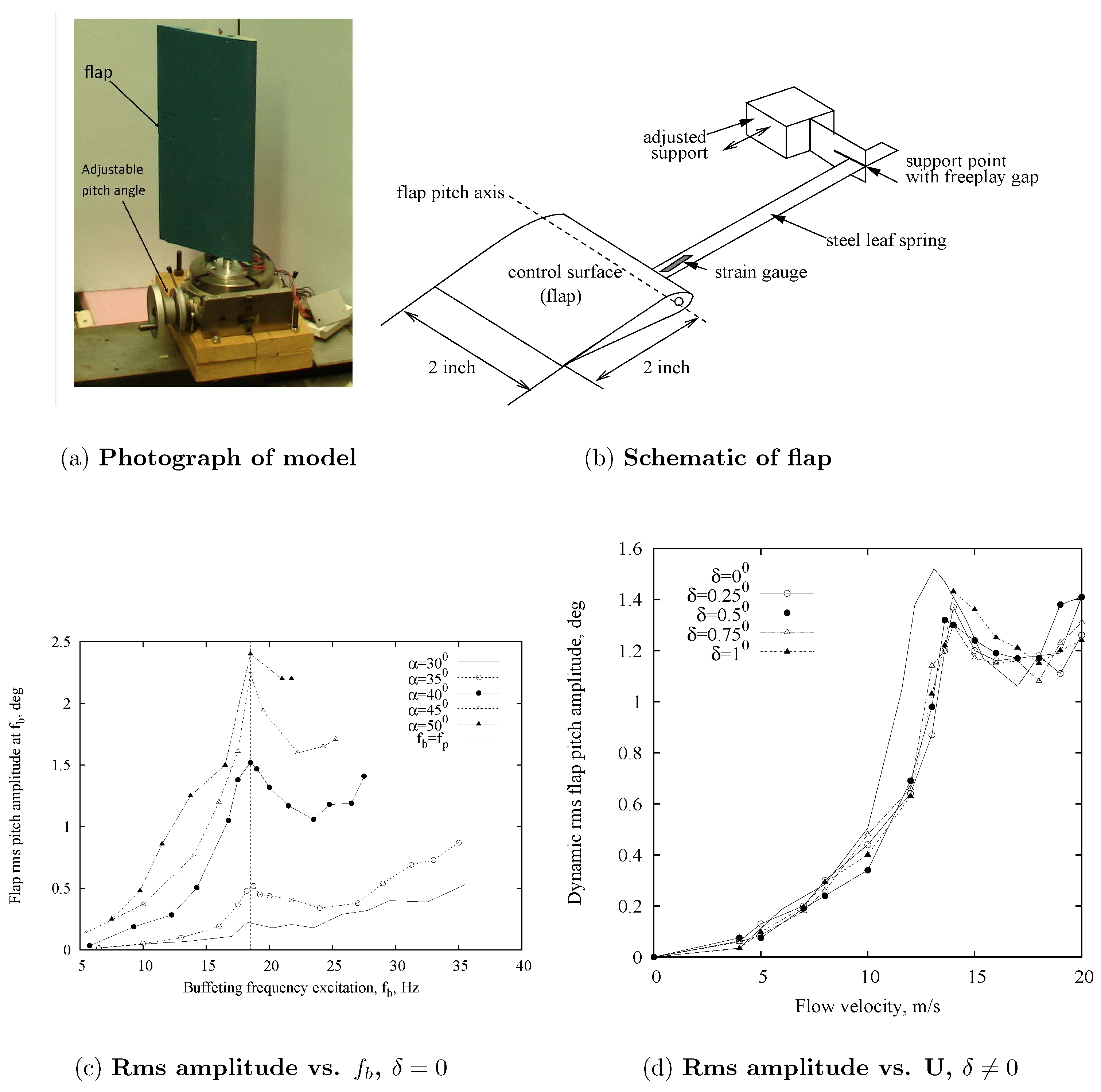
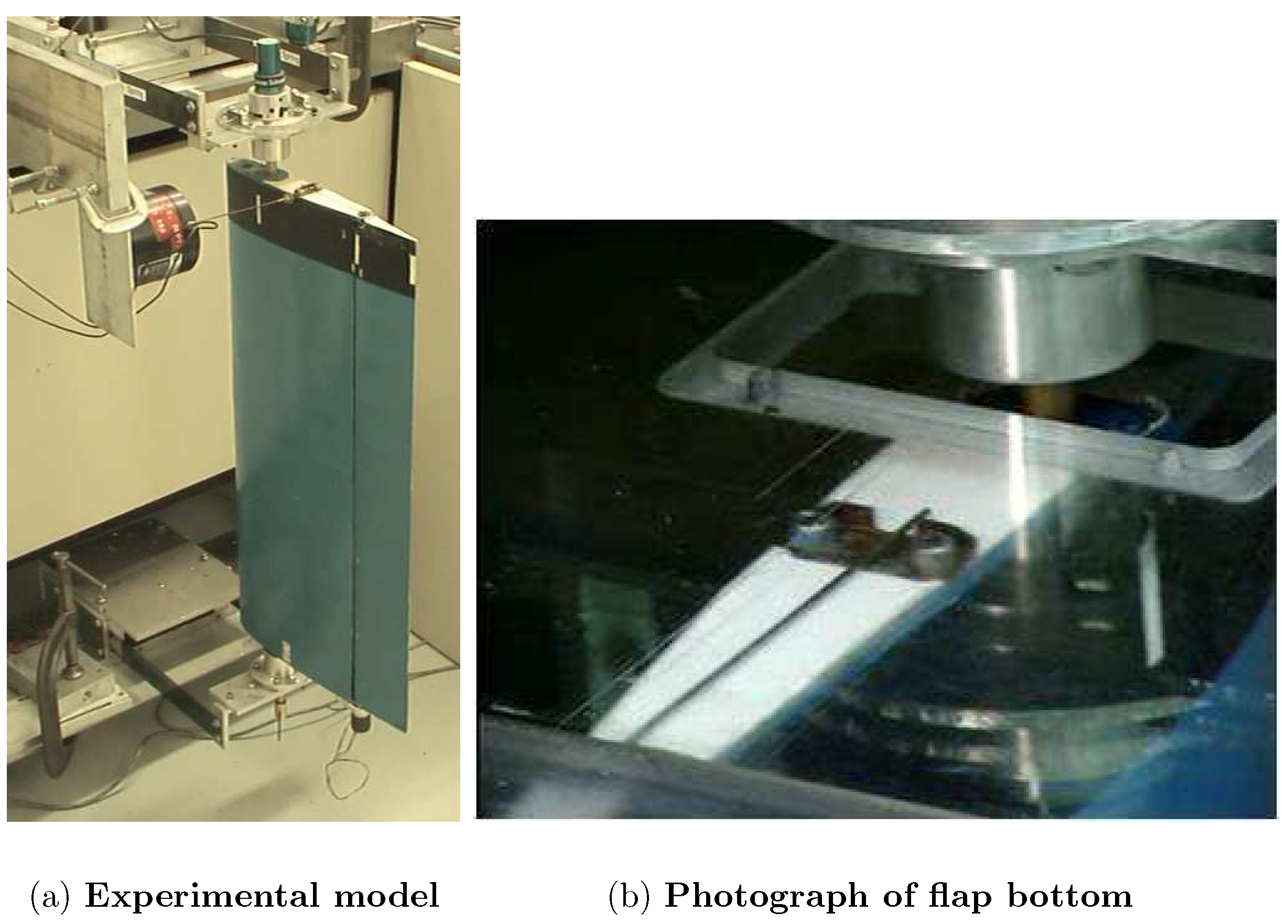
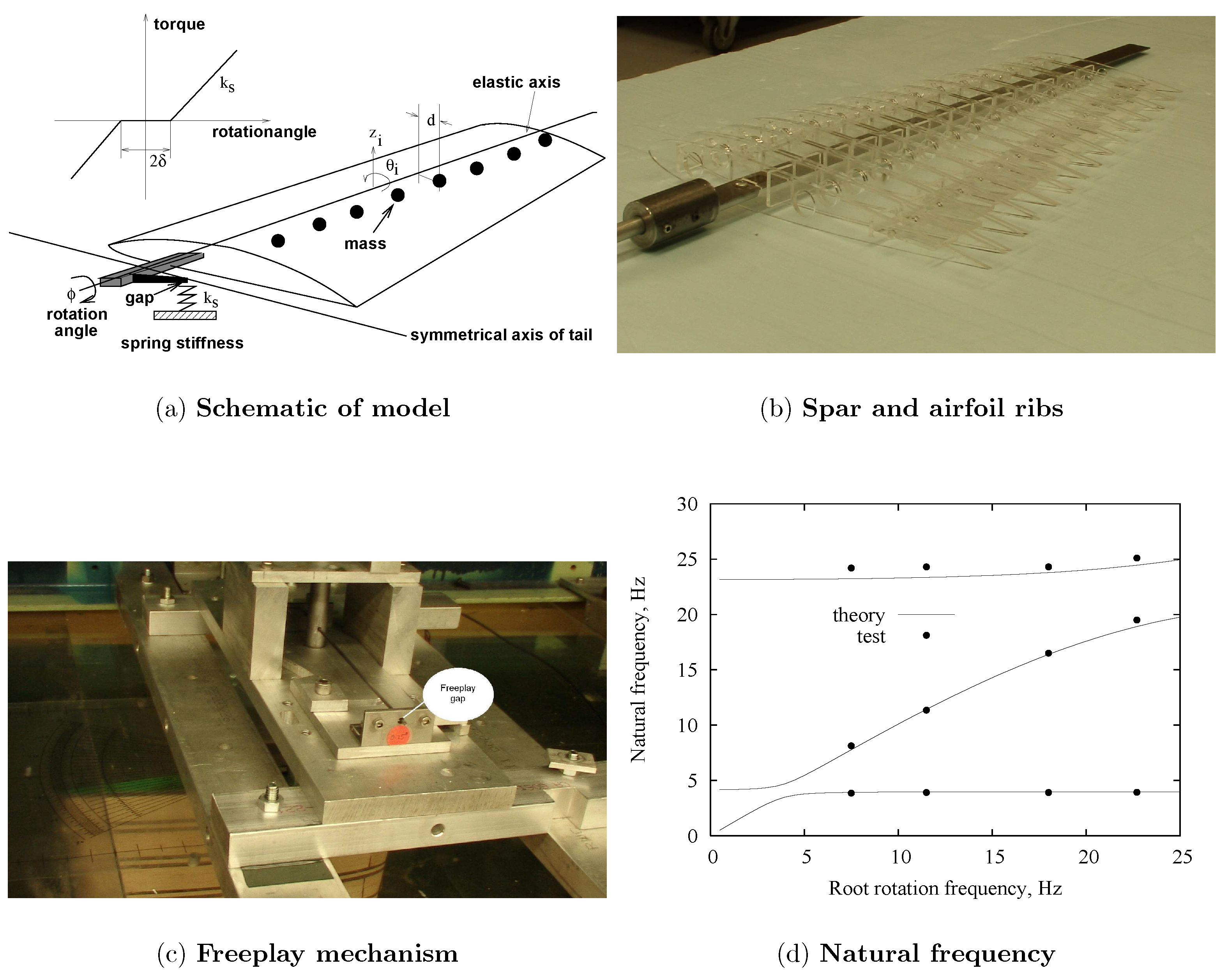
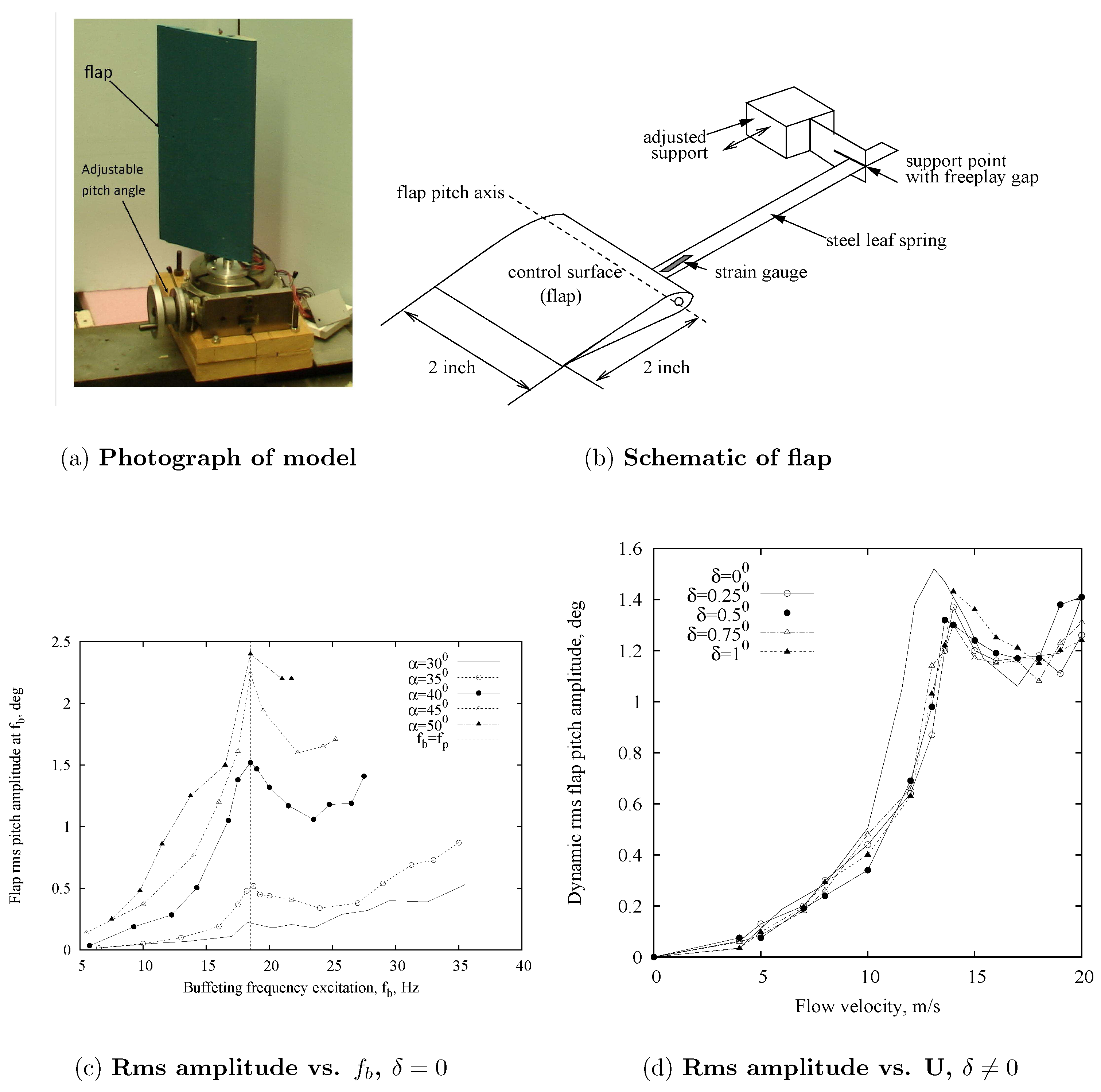
Figure 4a shows the photograph of the experimental model including the ground vibration test.
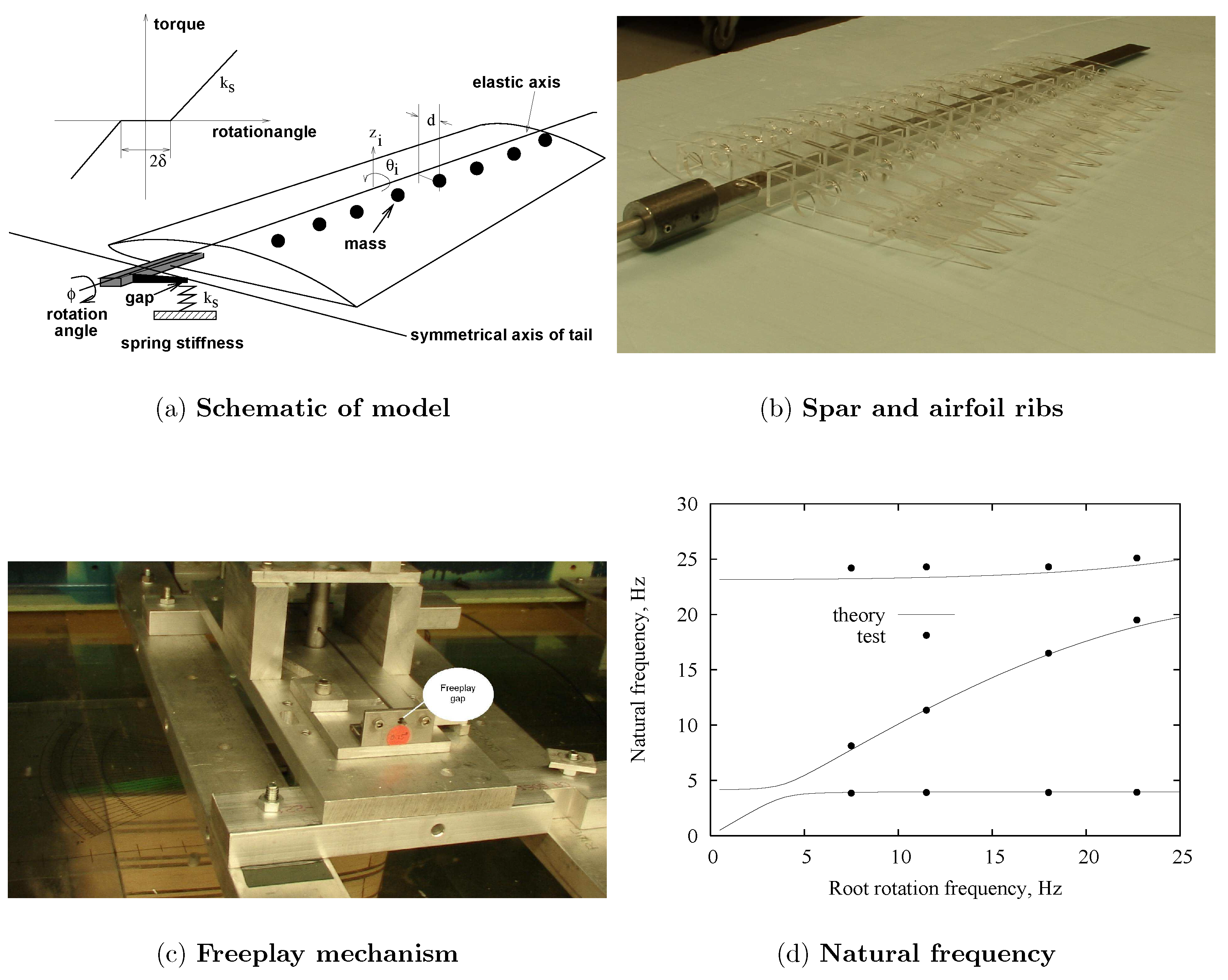
A rotational axis comprised of the micro-bearings and pin allows the flap to have a rotational degree of freedom relative to the main wing. A steel leaf-spring is inserted tightly into a slot of the tube spar beam at one end of the flap. The free end of the leaf spring is inserted into a support block mounted on the main wing,see
Figure 4b. The amount of structural stiffness that the leaf-spring provides can be adjusted by moving the support block toward or away from the rotational axis of the flap or by changing the diameter of the leaf-spring. Freeplay is incorporated by using a support block that allows the free end of the leaf-spring to move through a given range of motion before encountering resistance.
The support mechanisms for the entire model are mounted outside of the wind tunnel, at the top and bottom. The support mechanism at each end is a bi-cantilever beam made of two teel leaf-springs which are 20.32 cm long, 2.86 cm wide, and 0.102 cm thick. The distance between the two cantilever beams is 15.24 cm. A support block joins the free ends of the bi-cantilevered beams on both the top and the bottom and is free to move in the plunge direction.
Figure 2 shows the plunging motion of the support structure. An identical structure is located on the bottom side of the wind tunnel. The two support blocks are the only parts of the support mechanism that move with the model, and this motion is restricted to the plunge degree of freedom. The pitch axis of the main wing is mounted to the upper and lower support blocks through a pair of precision bearings which have small amount of dry friction in the ball. This design allows the model to have a plunge motion that is independent of the pitch degree of freedom. At the upper bracket, there is a spring wire inserted tightly into the pitch axis of the wing. The ends of the spring wire are simply supported on the bracket, which provides an adjustable pitch stiffness. The bracket is mounted on the upper support mechanism by three screws. The bracket allows rotation around the pitch axis when the screws are used to adjust the initial pitch angle.
The pitch angle of the main wing is measured by a rotational velocity displacement transducer, R30, which is fixed at the upper end of the pitch axis. The angular displacement transducer was calibrated and showed excellent linear response characteristic and high sensitivity. The plunge displacement is measured using another R30 which determines the motion of the upper support block. The flap rotational motion relative to the main wing is measured by a micro-RVDT which is mounted on the flap axis outside of the main wing. These three measurement signals are independent of one another.
The output from these transducers is amplified and directly recorded by data acquisition system, LabView 8.0 version in the computer. The digitized response data can be graphically displayed either on-line or off-line as a time history, phase plane plot, FFT, PSD, or Poincare map. In order to make a comparison of the theoretical and experimental data, a measurement system calibration was completed before the wing tunnel test. The dynamic calibration coefficients were determined by a ground vibration test. The system parameters for the experimental model are shown in
Table 4.
From the experimental ground vibration results, a comparison of the structural natural frequencies for the numerical and experimental systems is given in
Table 5.
Correlation study for zero angle of attack, = 0
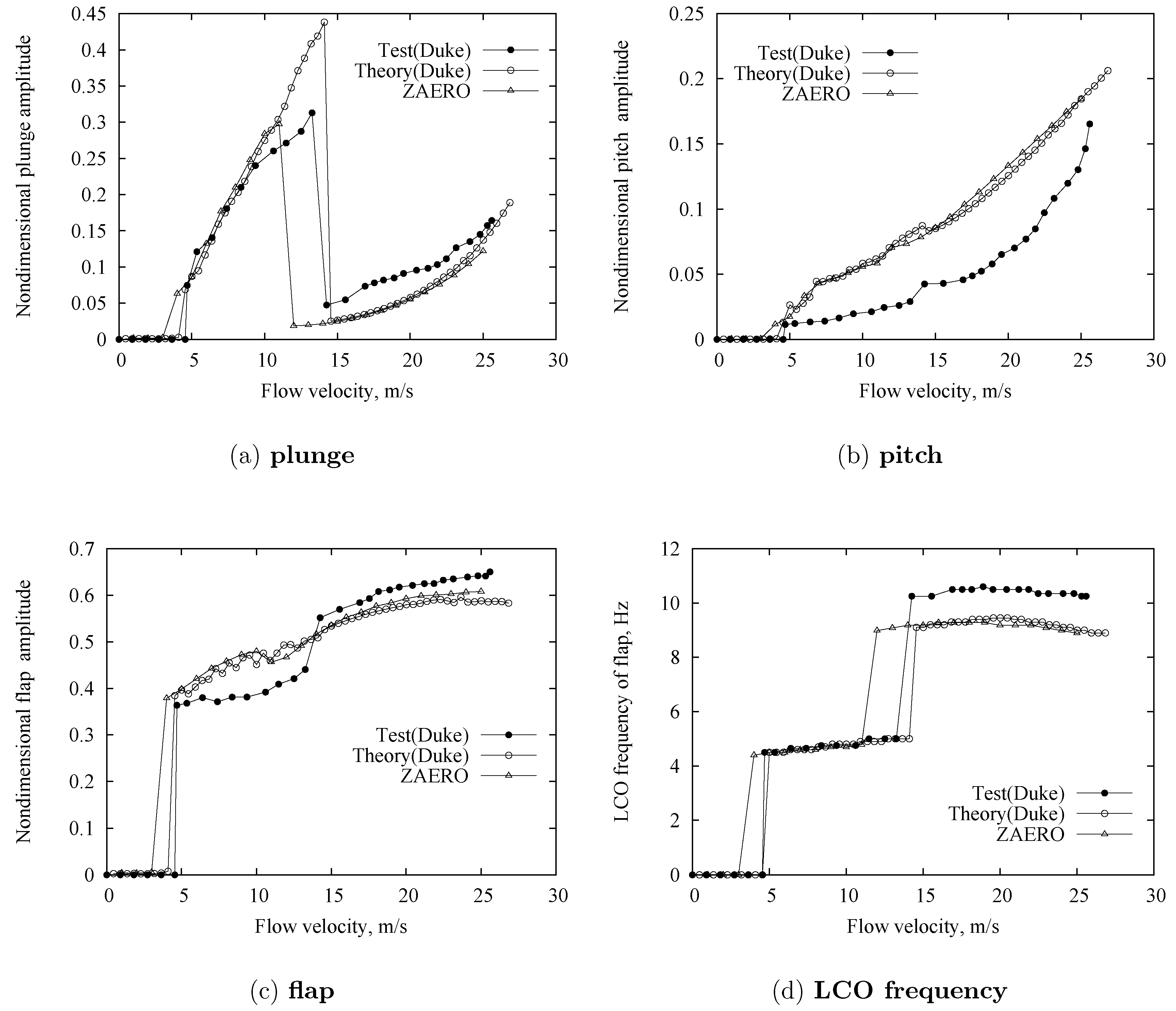
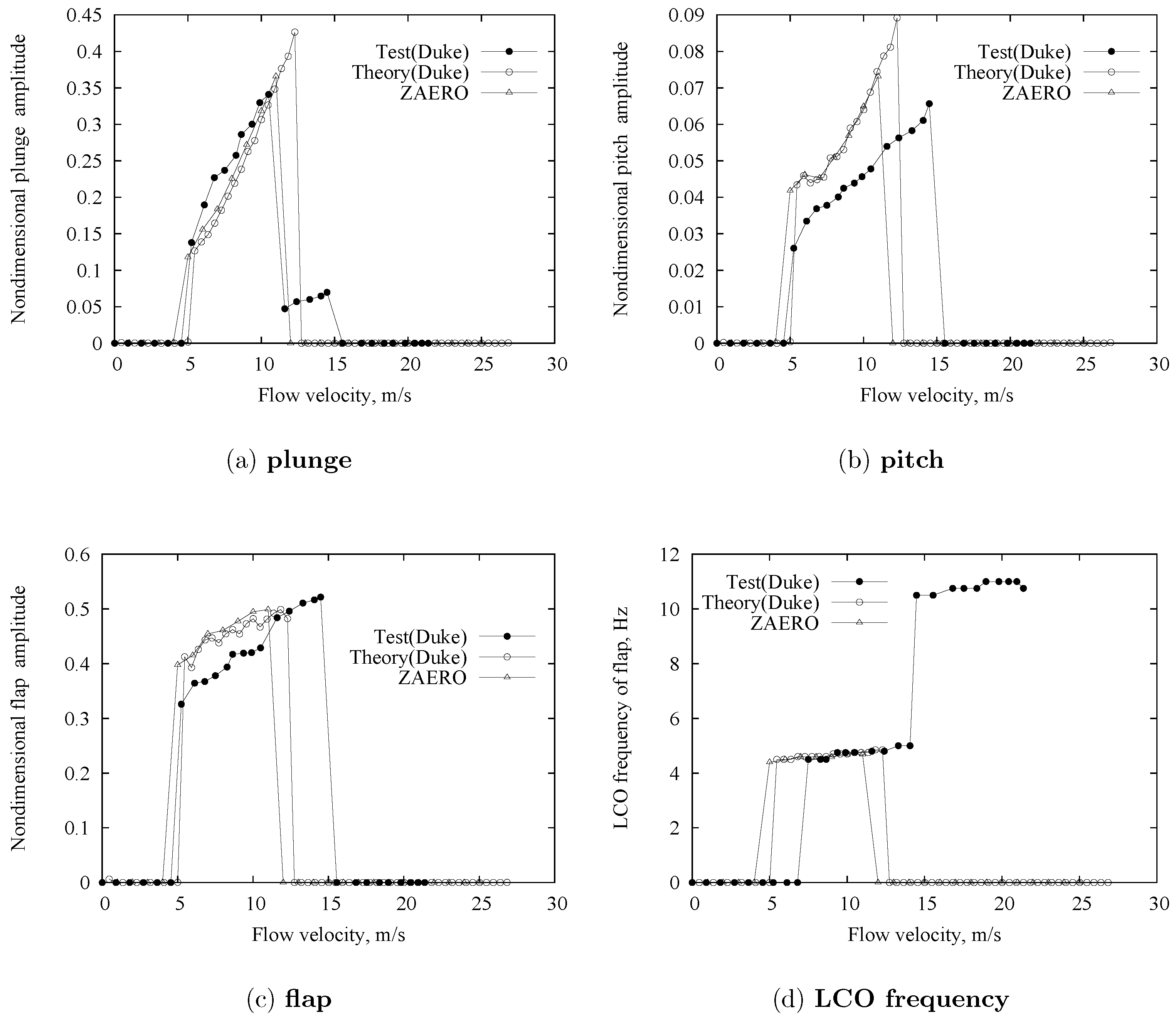
For the flutter/LCO test, a freeplay gap, = 2 × 2.12, to be used. A nondimensional rms amplitude normalized by the freeplay gap is introduced here for LCO amplitude. The pitch and flap motions are nondimensionalized by the freeplay gap, i.e., by . For the plunge motion, it is nondimensionalized by b/180.
When the freeplay gap is set zero, the measured flutter flow velocity is 26.5 m/s for zero initial angle of attack. Because in this flow velocity range the model motion is very large we use an external device to limit the plunge motion amplitude. The measured flutter frequency is about 6.25 Hz.
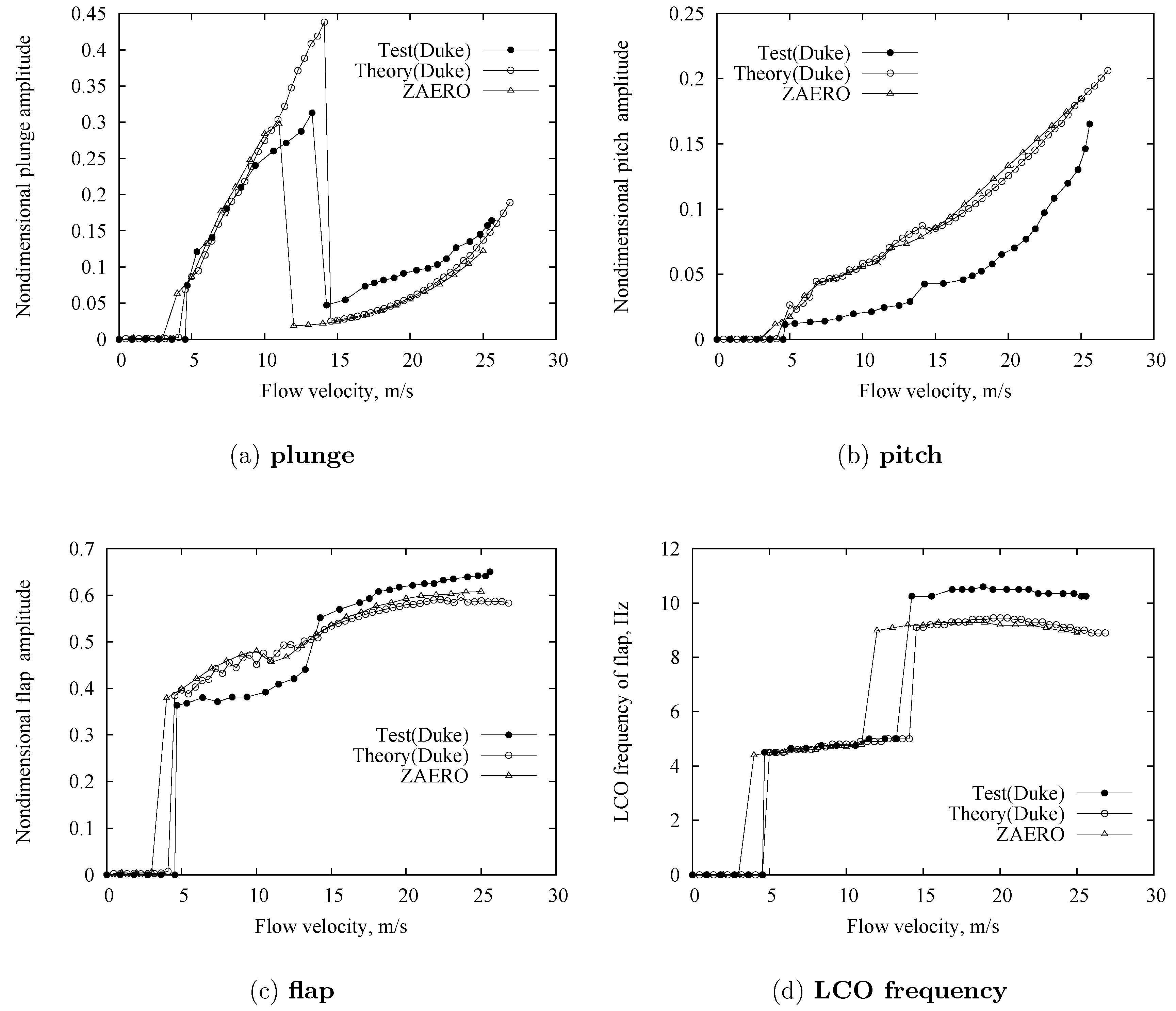
Figure 5 shows the nondimensional plunge, pitch, flap LCO amplitudes and LCO frequency
vs. the flow velocity for the initial pitch angle,
= 0. The motion may be periodic or non-periodic or chaotic. Here we use rms amplitude to present the LCO motion
vs. the flow velocity.
As shown
Figure 5, when the flow velocity,
U, is less than 4.67 m/s no LCO occurs either for the theory or the experiment. When U is between 4.67 and 13.26 m/s for the experiment and 4.55 and 14.1 m/s for the theory, the motion is dominated by the plunge degree of freedom and has an oscillation frequency of about 4.5 to 5 Hz for both the theory and experiment. When
U is between 13.26 and 25.6 m/s for the experiment and 14.1 and 27.4 m/s for the theory, the motion is dominated by the flap degree of freedom and has an oscillation frequency of about 10–10.5 Hz for the experiment and 9–9.5 Hz for the theory. When
U is greater than 25.6 m/s, the experimental LCO amplitude abruptly increases and the test is stopped to protect the model (this is called the catastrophic flutter velocity). This flow velocity is close to the experimental flutter velocity (26.5 m/s) of the linear structure without freeplay. However, the theoretical catastrophic flutter velocity is 27.4 m/s and is slightly higher than the theoretical linear flutter velocity (27.3 m/s). For comparison, the computational results using CFD code, ZAERO, provided by ZONA Technology, Inc., are also presented in this figure.
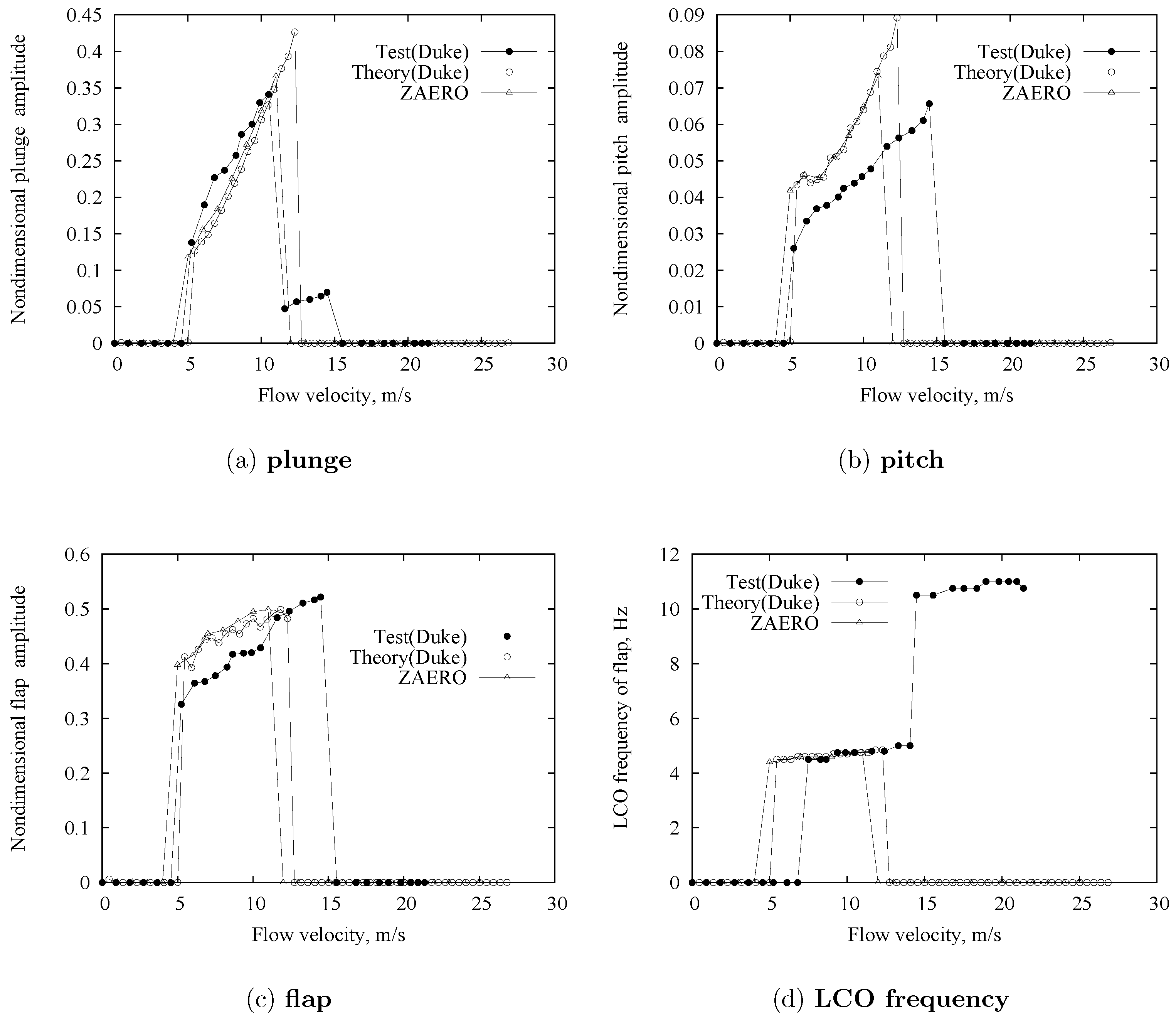
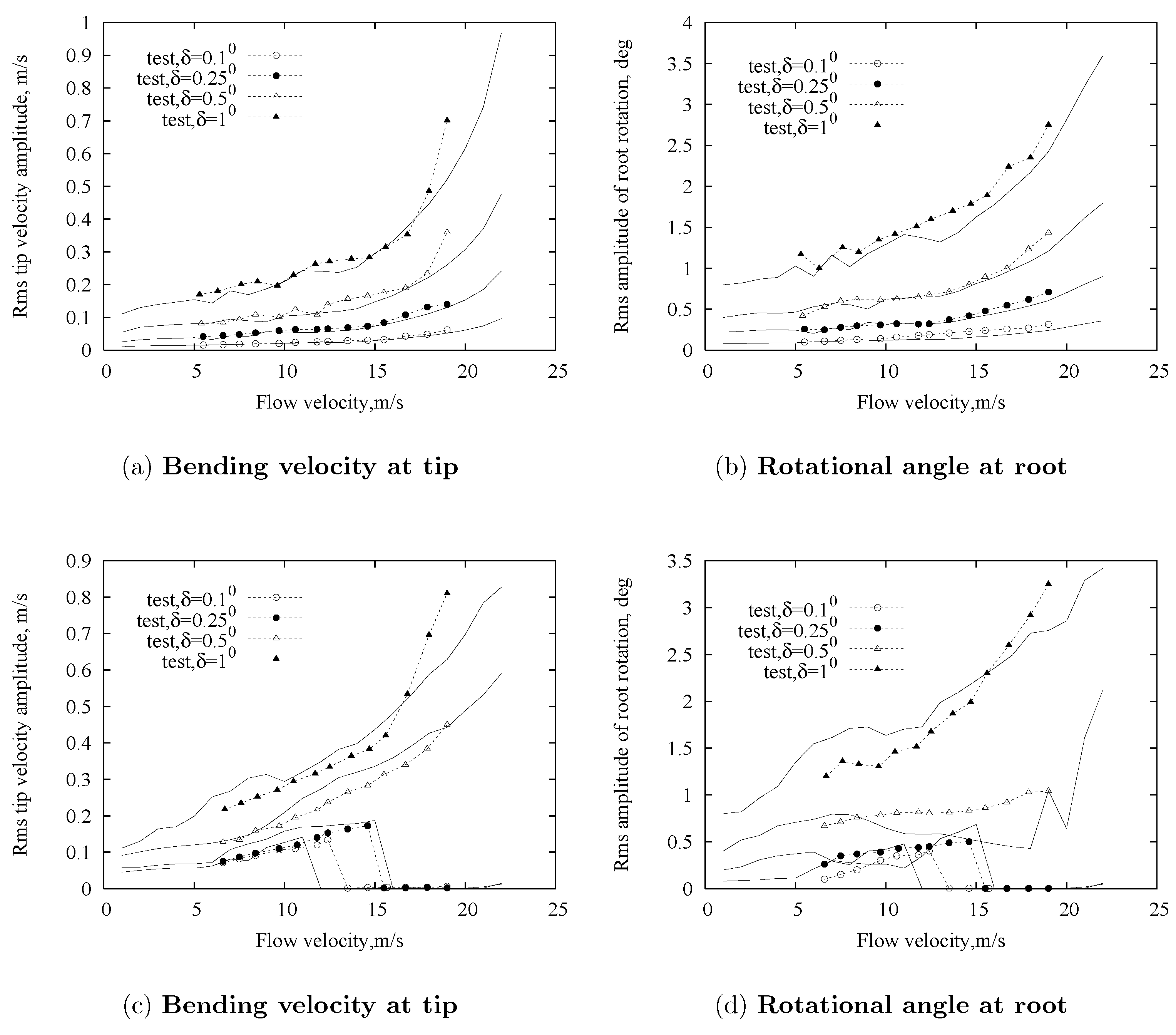
Correlation study for no-zero angle of attack,
Experimental measurement for the several initial pitch angles of attack from
= 2
to 8
, are made to study the correlation. Here, only one case (
= 6
) is shown
Figure 6. Summarizing the correlation results from
= 2
to
= 8
, the following observations may be made.
(1) The flow velocity corresponding to a change in the LCO behavior from a lower frequency oscillation to a higher frequency oscillation changes modestly in the experiments as increases.
(2) The flow velocity corresponding to catastrophic flutter (very large LCO amplitude) also decreases as the initial pitch angle increases. The experimental results are 25.6 m/s for = 0; 25.05 m/s for = 2; 23.96 m/s for = 4; 21.48 m/s for = 6 and 20.43 m/s for = 8.
(3) When equals 8, the flow velocity range for the LCO becomes quite small and when is larger than 8 the LCO disappears both for the theory and test.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}