
Physical Modeling and Simulation of Reusable Rockets for GNC Verification and Validation †
 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Modeling Challenges and Simulation Framework
- The multidisciplinary nature of the involved dynamics;
- The difference in the vehicle operational regimes during different test flights;
- The difficulty in quickly incorporating the results obtained from the specific field experts during their iterations (e.g., propulsion, structure, aerodynamics, etc.).
2.1. Reusable Rocket Dynamics
2.2. Acausal Physical Simulation Modeling for Reusable Rockets
2.3. Framework Description
3. The VLVLib: A Modelica Library for the Physical Modeling of Reusable Rockets
3.1. Library Development Approach
3.1.1. The Architecture-Driven Approach
3.1.2. Models Minimality
3.1.3. Library Packages Encapsulation
3.1.4. Handling Parameters and Data
3.1.5. Models Export and Simulink® Integration
3.1.6. Information Propagation across Components
3.2. How to Derive a Vehicle Model with a Custom Configuration
- The World class, needed to operate with the MSL’s Multibody package. It defines the inertial frame (called ‘World’) for referencing all model states and the gravity field.
- The DryBody, modeling the dry structural mass and moment of inertia.
- The TanksAssembly component, to model the propellant distribution and, if activated, the slosh dynamics.
- The support classes enabling the input of generic forces and torques suitably expressed in a vehicle-fixed frame. If they are engine or RCS thrust forces, they are injected at the correct application point.
- Two components, globalBending for modeling flexibility and sixDofGround to simulate pre-flight phases, which are not further deepened here.
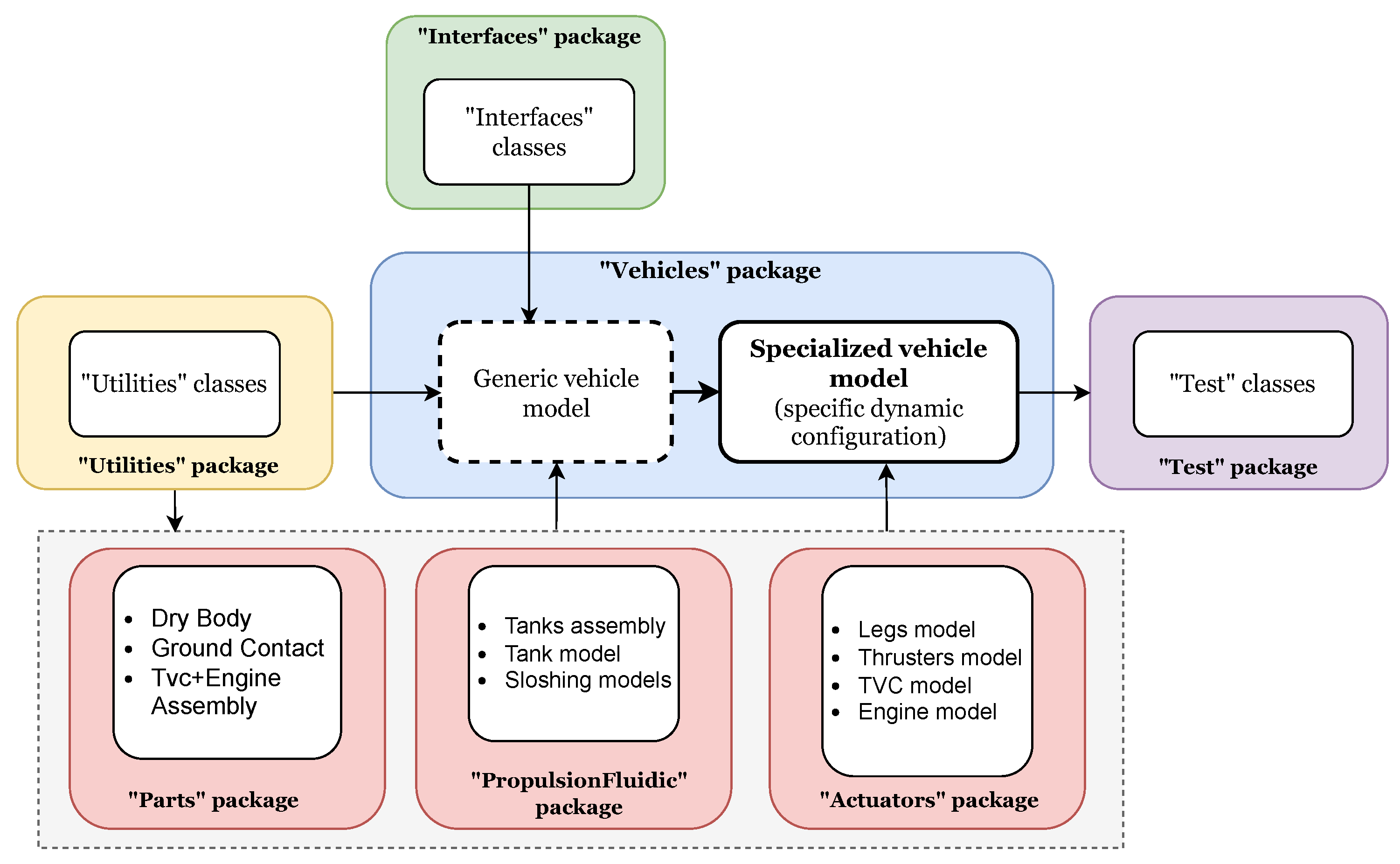
3.3. VLVLib Packages Description
- #1
- The Vehicles package contains the base models of specific vehicles (e.g., Callisto) after extending the GenericVehicle partial model.
- #2
- Contains fundamental classes that concur in building the GenericVehicle class, but also specific dynamic effects (like flexibility) or actuator assemblies.
- #3–4
- Contain respectively the models for simulating the propulsion system and the actuator dynamics like the landing legs and TVC system.
- #5
- Includes utility classes of any type used across the library.
- #6
- Contains several unit tests of fundamental library models, including the vehicle ones.
- #7
- Contains the specialized vehicle models for the final export. For instance, the displayed Callisto_S_NL_NT model includes sloshing, but no TVC nor leg dynamics.
4. Propellant Slosh Dynamics Modeling
5. EMA-Based Thrust Vector Control Modeling
5.1. Mechanical Power Transmission Modeling
- Level 1. It simply considers a perfect conversion of the motor torque and angular speed into a force and linear velocity, respectively.
- Level 2. It adds a mechanical efficiency factor and an equivalent structural compliance (spring), capturing the whole transmission elasticity.
- Level 3. It removes the efficiency factor and considers the mechanical degradation coming from the viscous friction. It includes the EMA screw mass as well.
- Level 4. It adds Coulomb and Stribeck friction model contributions.
- Level 5. It adds a friction component that depends on the loads induced by the engine dynamic condition.
- Level 6. It adds the mechanical backlash and preload effects.
5.2. Electric Motor Modeling
- Level 1. This is the simplest model, where the demanded torque is purely applied to the motor rotor rotational inertia.
- Level 2. Here, the PMSM is physically modeled: the stator three-phase voltage and current equations can be written in a stationary reference frame. This transforms the three-phase machine into a two-phase machine, equipped with two windings fixed with the stator and orthogonal each other, expressed as d (‘direct’) and q (‘quadrature’), allowing for a more straightforward current closed loop design and analysis [33].
- Level 3. It adds to EM Level 2 several dissipative effects: (i) friction losses; (ii) core losses (eddy current and hysteresis losses); (iii) permanent magnet losses; (iv) cogging torque. They are are included using the machine losses MSL’s package.
5.3. Power Drive Electronics Modeling
- Level 1. An input motor torque demand from the EMA control system is transferred directly to the EM as output. No dynamic is introduced.
- Level 2. The motor torque outputted to the EM has second-order dynamics depending on the current loop natural frequency and its damping factor.
- Level 3. This model implements the physical PDE dynamics to be connected with the motor. In this scenario, two closed loops are present to deal with the motor direct and quadrature currents. The motor torque demand is transformed into an appropriate quadrature current, responsible for the motor torque generation. The direct current is regulated to zero. These currents are transformed into a three-phase representations via an inverse Park transform. The voltage to produce such currents feeds the motor via an ideal generator.
- Level 4. Adds to the Level 3 implementation the Pulse-Width Modulation (PWM) and inverter dynamics to command the required voltage to the EM. Introducing an inverter model is computationally heavy, so this fidelity level is not considered hereafter.
5.4. The EMA Control System
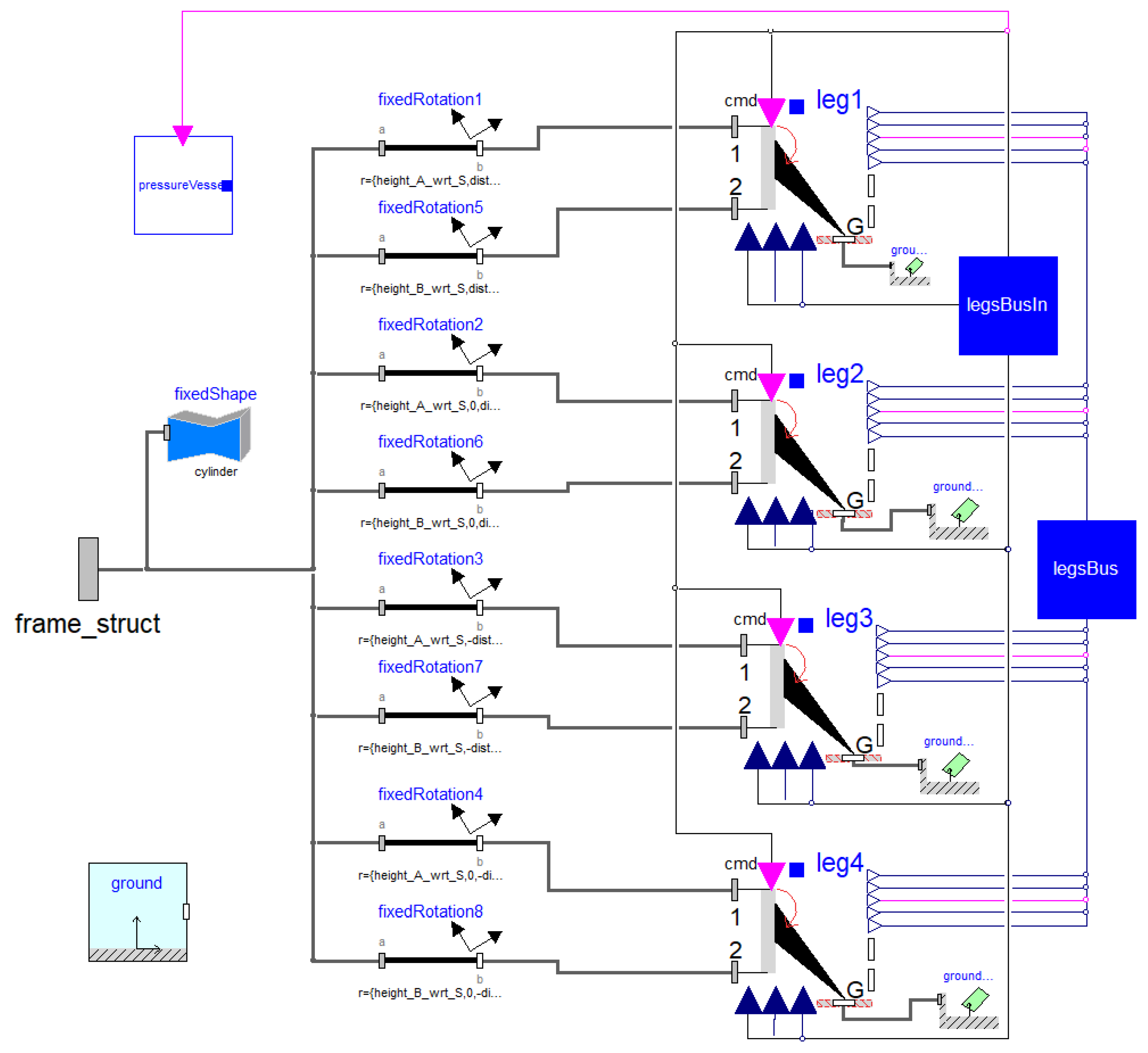
6. Landing Legs Deployment Model
7. Ground Contact Modeling
8. Simulation Results
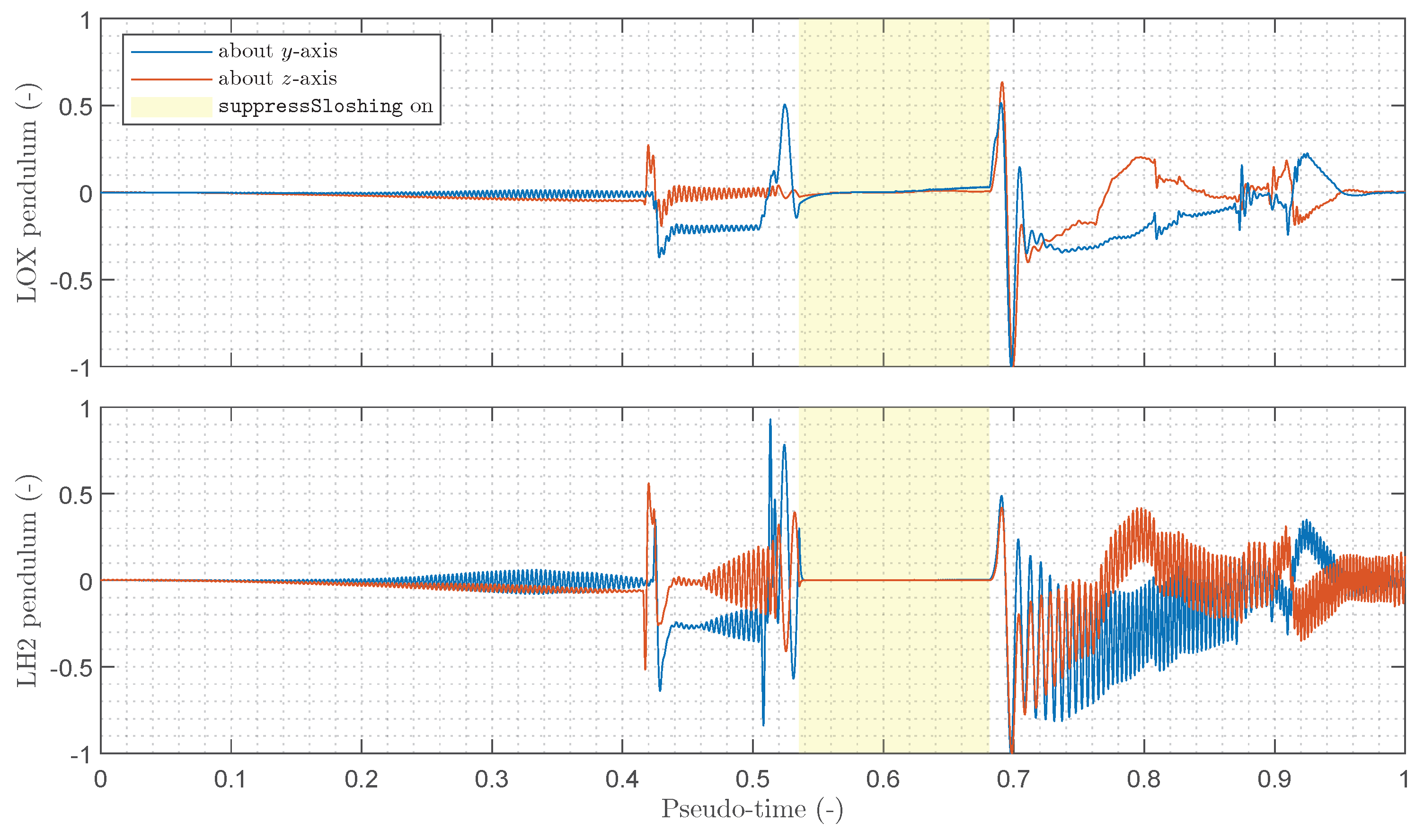
8.1. Sloshing Dynamics
8.2. TVC System
8.3. Legs Deployment and Touchdown Dynamics
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CALLISTO | Cooperative Action Leading to Launcher Innovation in Stage Toss back Operations |
| CNES | Centre National d’Études Spatiales |
| CoM | Center of Mass |
| DAE | Differential-Algebraic system of Equations |
| DLR | Deutsches Zentrum für Luft- und Raumfahrt (English: German Aerospace Center) |
| DoF | Degrees-of-Freedom |
| EM | Electric Motor |
| EMA | Electro-Mechanical Actuator |
| FMI | Functional Mock-up Interface |
| FMU | Functional Mock-up Unit |
| GNC | Guidance, Navigation and Control |
| IDE | Integrated Development Environment |
| JAXA | Japan Aerospace Exploration Agency |
| MCI | Mass-Centering-Inertia |
| MoI | Moment of Inertia |
| MPT | Mechanical Power Transmission |
| MSL | Modelica Standard Library |
| PDE | Power Drive Electronics |
| PMSM | Permanent-Magnet Synchronous Motor |
| PWM | Pulse-Width Modulation |
| RCS | Reaction Control System |
| RLV | Reusable Launch Vehicle |
| TVC | Thrust Vector Control |
| TWD | Tail-Wags-Dog |
| V&V | Validation and Verification |
| VLVLib | Vertical Landing Vehicles Library |
| VTVL | Vertical Take-off, Vertical Landing |
Appendix A. Landing Legs Deployment Library Implementation


Appendix B. Ground Contact Library Implementation

References
- Blackmore, L. Autonomous Precision Landing of Space Rockets. Natl. Acad. Eng. Bridge Front. Eng. 2016, 4, 15–20. [Google Scholar]
- Hoffman, L.; Baker, M.; Glynn, S.; Darley, M.; Beck, P. Reusable Electron: Analysis of Progress Toward the World’s First Reusable Commercial Small Rocket. In Proceedings of the Small Satellite Conference, Logan, UT, USA, 6–11 August 2022. [Google Scholar]
- Dumont, E.; Illig, M.; Ishimoto, S.; Chavagnac, C.; Saito, Y.; Krummen, S.; Eichel, S.; Martens, H.; Giagkozoglou, S.; Häseker, J.S.; et al. CALLISTO: A Prototype Paving the Way for Reusable Launch Vehicles in Europe and Japan. In Proceedings of the 73rd International Astronautical Congress (IAC), Paris, France, 18–22 September 2022. [Google Scholar]
- Dumont, E.; Ecker, T.; Chavagnac, C.; Witte, L.; Windelberg, J.; Klevanski, J.; Giagkozoglou, S. CALLISTO—Reusable VTVL Launcher First Stage Demonstrator. In Proceedings of the Space Propulsion Conference, Seville, Spain, 14–18 May 2018. [Google Scholar]
- Bertorello, C.; Gogdetb, O.; Breteauc, J.; Tincelind, Y.; Cliquet-Moreno, E.; Coletti, E.; Bensalem, S. Themis Demonstration Programme. In Proceedings of the 73rd International Astronautical Congress (IAC), Paris, France, 18–22 September 2022. [Google Scholar]
- Gallego, P. MIURA 5: The European and Reusable Microlauncher for CubeSats and Small Satellites. In Proceedings of the Small Satellite Conference, Logan, UT, USA, 1–6 August 2020. [Google Scholar]
- Patureau de Mirand, A.; Bahu, J.M.; Gogdet, O. Ariane Next, a Vision for the next Generation of Ariane Launchers. Acta Astronaut. 2020, 170, 735–749. [Google Scholar] [CrossRef]
- Strauch, H.; Luig, K.; Bennani, S. Model Based Design Environment for Launcher Upper Stage GNC Development. In Proceedings of the Workshop on Simulation on for European Space Programmes (SESP), ESA/ESTEC, Noordwijk, The Netherlands, 24–26 March 2015. [Google Scholar]
- Gäßler, B.; Briese, L.E.; Acquatella B., P.; Simplício, P.; Bennani, S.; Casasco, M. Design and Development of R2M2—A Multi-Physics Modeling Tool for Reusable Launch Vehicles. In Proceedings of the 9th International Conference on Astrodynamics Tools and Techniques (ICATT), Sopot, Poland, 12–16 June 2023. [Google Scholar]
- Farì, S.; Grande, D. Vector Field-based Guidance Development for Launch Vehicle Re-entry via Actuated Parafoil. In Proceedings of the 72nd International Astronautical Congress (IAC), Dubai, United Arab Emirates, 25–29 October 2021; Available online: https://elib.dlr.de/145123 (accessed on 20 April 2024).
- Gutierrez, J.L.R.; Farì, S.; Winter, M. Control System Design for the ALINA Lunar Lander. In Proceedings of the 72nd International Astronautical Congress (IAC), Dubai, United Arab Emirates, 25–29 October 2021; Available online: https://elib.dlr.de/145129 (accessed on 20 April 2024).
- Farì, S.; Seelbinder, D.; Theil, S. Advanced GNC-oriented Modeling and Simulation of Vertical Landing Vehicles with Fuel Slosh Dynamics. Acta Astronaut. 2022, 204, 294–306. [Google Scholar] [CrossRef]
- Looye, G. The New DLR Flight Dynamics Library. In Proceedings of the 6th Modelica Conference, Bielefeld, Germany, 3–4 March 2008. [Google Scholar]
- Pulecchi, T.; Casella, F.; Lovera, M. A Modelica Library for Space Flight Dynamics. In Proceedings of the 5th International Modelica Conference, Vienna, Austria, 4–5 September 2006. [Google Scholar]
- Briese, L.E.; Schnepper, K.; Acquatella B., P. Advanced Modeling and Trajectory Optimization Framework for Reusable Launch Vehicles. In Proceedings of the 2018 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2018. [Google Scholar] [CrossRef]
- Acquatella, P.; Reiner, M.J. Modelica Stage Separation Dynamics Modeling for End-to-End Launch Vehicle Trajectory Simulations. In Proceedings of the 10th International Modelica Conference, Lund, Sweden, 10–12 March 2014. [Google Scholar]
- Farì, S. The Vertical Landing Vehicles Library (VLVLib): A Modelica-based Approach to High-Fidelity Simulation and Verification of GNC Systems for Reusable Rockets. In Proceedings of the 73rd International Astronautical Congress (IAC), Paris, France, 18–22 September 2022; Available online: https://elib.dlr.de/188514 (accessed on 20 April 2024).
- Martin, C.; Urquia, A.; Sanchez, J.; Dormido, S. Interactive Simulation of Object-Oriented Hybrid Models, by Combined Use of Ejs, Matlab/Simulink and Modelica/Dymola. In Proceedings of the 18th European Simulation Multiconference, Magdeburg, Germany, 13–16 June 2004. [Google Scholar]
- Schneider, A.; Desmariaux, J.; Klevanski, J.; Schröder, S.; Witte, L. Deployment Dynamics Analysis of CALLISTO’s Approach and Landing System. CEAS Space J. 2023, 15, 343–356. [Google Scholar] [CrossRef]
- Farì, S.; Seelbinder, D.; Theil, S.; Simplicio, P.; Bennani, S. Physical Modeling and Simulation of Electro-Mechanical Actuator-Based TVC Systems for Reusable Launch Vehicles. Acta Astronaut. 2024, 214, 790–808. [Google Scholar] [CrossRef]
- Gäßler, B.; Briese, L.E.; Acquatella B., P.; Simplício, P.; Bennani, S.; Casasco, M. Variable-Mass Dynamics Implementation in Multi-Physics Environment for Reusable Launcher Simulations. In Proceedings of the 9th European Conference for Aeronautics and Space Sciences (EUCASS-3AF), Lille, France, 27 June–1 July 2022. [Google Scholar] [CrossRef]
- Modelica Association. Modelica Standard Library. Available online: https://github.com/modelica/ModelicaStandardLibrary (accessed on 20 April 2024).
- Otter, M.; Elmqvist, H.; Mattsson, S.E. The New Modelica MultiBody Library. In Proceedings of the 3rd International Modelica Conference, Linköping, Sweden, 3–4 November 2003. [Google Scholar]
- The MathWorks, Inc. Implement Variations in Separate Hierarchy Using Variant Subsystems. Available online: https://www.mathworks.com/help/simulink/ug/variant-subsystems.html (accessed on 20 April 2024).
- Modelica Association. Functional Mock-up Interface. Available online: https://fmi-standard.org (accessed on 20 April 2024).
- Brück, D.; Elmqvist, H.; Mattsson, S.E.; Olsson, H. Dymola for Multi-Engineering Modeling and Simulation. In Proceedings of the 2nd International Modelica Conference, Starnberg, Germany, 18–19 March 2002. [Google Scholar]
- Fritzson, P. Principles of Object-Oriented Modeling and Simulation with Modelica 3.3: A Cyber-Physical Approach; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Modelica Association. Modelica Specification. Available online: https://specification.modelica.org (accessed on 20 April 2024).
- Bayle, O.; L’Hullier, V.; Ganet, M.; Delpy, P.; Francart, J.L.; Paris, D. Influence of the ATV Propellant Sloshing on the GNC Performance. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002. [Google Scholar] [CrossRef]
- Abramson, H.N. Dynamic Behavior of Liquids in Moving Containers with Applications to Space Vehicle Technology; Special Publication (SP) 19670006555; NASA: Washington, DC, USA, 1966.
- Dodge, F.T.; Antonio, S. The New “Dynamic Behavior of Liquids in Moving Containers”; Southwest Research Inst.: San Antonio, TX, USA, 2000. [Google Scholar]
- Farì, S.; Seelbinder, D.; Theil, S.; Simplicio, P.; Bennani, S. Sensor Fault Detection and Isolation for Electro-Mechanical Actuators in a Reusable Launch Vehicle TVC System. In Proceedings of the 10th European Conference For Aeronautics And Space Sciences (EUCASS), Lausanne, Switzerland, 9–15 July 2023. [Google Scholar] [CrossRef]
- Krishnan, R. Permanent Magnet Synchronous and Brushless DC Motor Drives, 1st ed.; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Hofmann, A.; Mikelsons, L.; Gubsch, I.; Schubert, C. Simulating Collisions within the Modelica MultiBody Library. In Proceedings of the 10th International Modelica Conference, Lund, Sweden, 10–12 March 2014; pp. 949–957. [Google Scholar] [CrossRef]
- Oestersötebier, F.; Wang, P.; Trächtler, A. A Modelica Contact Library for Idealized Simulation of Independently Defined Contact Surfaces. In Proceedings of the 10th International Modelica Conference, Lund, Sweden, 10–12 March 2014; pp. 929–937. [Google Scholar] [CrossRef]
- Sagliano, M.; Tsukamoto, T.; Maces Hernandez, J.A.; Seelbinder, D.; Ishimoto, S.; Dumont, E. Guidance and Control Strategy for the CALLISTO Flight Experiment. In Proceedings of the 8th European Conference for Aeronautics and Space Sciences (EUCASS), Madrid, Spain, 1–4 July 2019. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dynamic Effect | Description |
|---|---|
| Aerodynamics | The aerodynamics are included by computing the generated forces and torques from ad hoc interpolation tables with respect to quantities like angle of attack, side-slip angle, Mach number and engine thrust. The tables normally come from computational fluid dynamics analyses, eventually adjusted by experiments. They also include dependencies with respect to each aerodynamic fin deflections and each landing leg opening angle. |
| Aerodynamic fins | Each fin’s aerodynamics are mainly included in the aforementioned aerodynamic look-up tables. Their deployment dynamics, however, influence the Mass-Centering-Inertia (MCI) vehicle properties by shifting the overall Center of Mass (CoM) and changing the overall vehicle Moment of Inertia (MoI). The deployment generates reaction forces and torques to the vehicle, but due to their relatively low mass, it could be neglected. |
| Dry vehicle dynamics | The dry vehicle (no propellant considered) inertial properties are captured as a specific body. Naturally, it has to be always included in any RLV model. |
| Engine thrust dynamics | The engine dynamics depend on environment properties during flight, like the air density. The thrust characteristics are obtained via interpolation tables after experimental testing and injected in the vehicle dynamics as an external force at the right application point. |
| Ground contact * | The landing legs interact with the ground at the moment of touchdown, therefore the vehicle tipping depends on if and how ground contact is modeled. The impact reaction forces and torques to each leg depend on the ground stiffness and damping properties, as well as those of the legs themselves. |
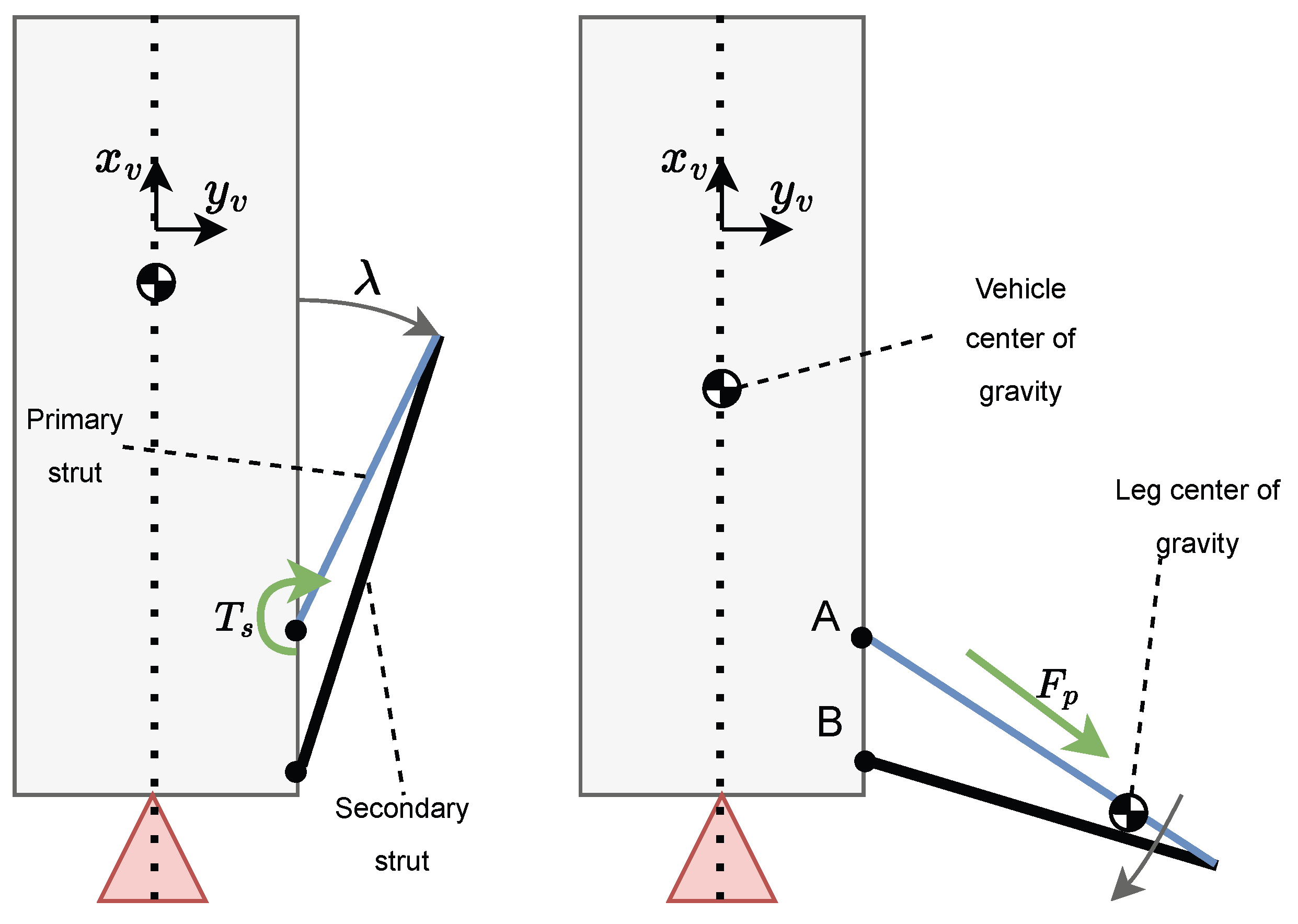
| Landing legs * | The deployment of landing legs has a similar impact on the whole vehicle MCI as for the fins. Furthermore, their mass is not negligible, and the deployment dynamics depend on several factors, like the pneumatic system, the release springs, or the aerodynamic resistance. Hence, the resulting impact on the vehicle dynamics is relevant. Each leg is composed of several bodies connected in a closed kinematic loop; this makes each leg model, per se, multibody [19]. |
| Propellant depletion | As the propellant gets depleted, the remaining mass within the tank decreases, thus altering the overall vehicle MCI. This is due to both the fuel and oxidizer, but also to the RCS propellant. |
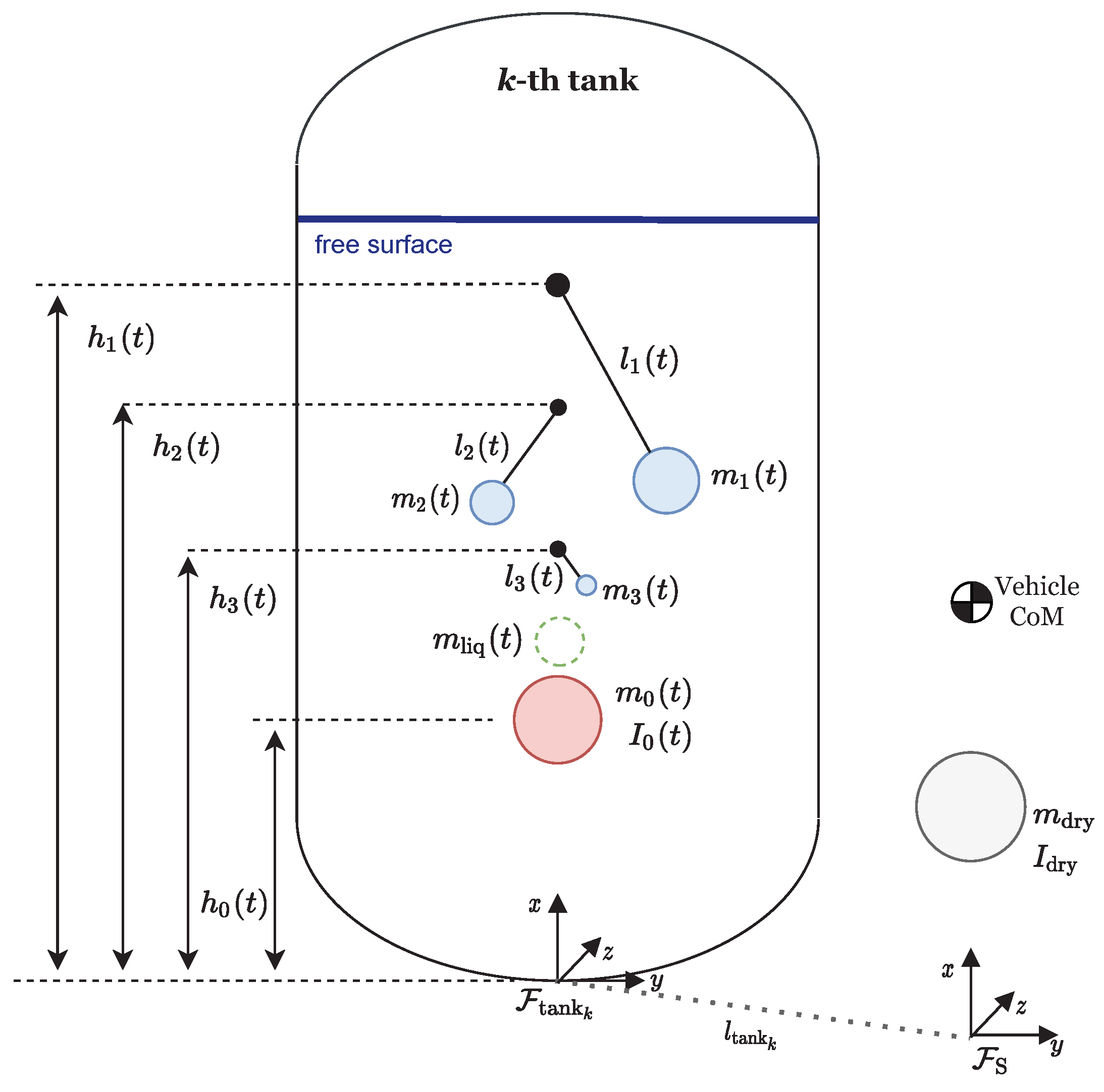
| Propellant slosh dynamics * | The propellant is subject to lateral sloshing motion, captured via a spherical pendulum mechanical equivalent. Each pendulum represents a fraction of the liquid mass in a tank, and must approximate the sloshing behavior at each tank filling level, for which specific parameters are available. The vehicle overall CoM and MoI properties are influenced by the pendula motion. |
| Reaction Control System (RCS) | The thrust direction of the RCS is normally fixed, whereas the thrust level depends on the air density. A simple model of the thrust profile of each thruster can be used and applied to the vehicle as external force at the right application point. |
| Structural flexibility | The vehicle experiences bending due to all the forces and torques acting on it, mainly aerodynamics, engine thrust, sloshing and control fins. The rocket flexibility heavily depends on the remaining propellant mass. Bending modeling can be tackled by adopting a linear combination of independent bending modes to describe the bending state of the structure. The application point of specific forces, like the main engine thrust or the aerodynamic forces, are then altered depending on the bent vehicle states. |
| Tail-Wags-Dog (TWD) | In rockets, a part of the engine assembly (or its nozzle, if present) is gimbaled to adjust the thrust direction. The gimbaled load is normally a non-negligible part of the vehicle overall mass. This ratio increases as the propellant is depleted. The interaction that arises between the engine/nozzle and the vehicle upper part is called the Tail-Wags-Dog effect. During the vehicle’s physical model development, adding the movable part of the engine as a separate body is enough to capture this effect [20]. |
| Thrust Vector Control (TVC) * | The thrust direction pointing is provided by two orthogonal EMAs. They are influenced by vehicle-induced loads and their efficiency can vary depending on the forces to exert, the resulting friction, the flexibility of the actuator itself and the structural joint properties. Moreover, the two TVC planes are coupled. The inertial properties of the movable engine part is accounted for by another body, as said for the TWD. |
| Variable mass effects | The propellant outflow causes variations in the liquid mass and MoI, generating additional Coriolis forces and torques to the vehicle, as well as a jet damping torque. The MoI variation also produces an additional torque function of the vehicle angular rates. These contributions are often not negligible and must be included [21]. |
| Requirement | Description |
|---|---|
| General applicability | The library shall be designed to not limit its applicability to only one class of vehicle, thereby providing a versatile tool. |
| Minimalism | Each model shall be crafted such that any increase in complexity does not compromise efficiency and understandability. |
| Interfaces standardization | A consistent and standardized approach to interfaces shall be prioritized, facilitating ease of use and integration with other environments. |
| Flexibility | The capability to adjust and configure models to suit specific design needs and scenarios shall be given, providing a robust platform for experimentation and development. |
| Modularity | The library shall facilitate the inclusion or removal of various dynamic effects, streamlining the process of model refinement and enhancement. |
| Complexity progressivity | The library shall allow the user to start with a basic model and incrementally add detail, aligning model sophistication with the stages of the design, simulation and V&V needs. |
| Integration with Simulink® | The implemented library models shall allow export and integration within Simulink®. Furthermore, they shall avoid the replication of functions or dynamics already implemented in Simulink®. |
| Requirement | |
|---|---|
| 1 | The overall tank liquid mass shall equal the sum of the masses after the liquid mass splitting. |
| 2 | The overall CoM of the liquid within a tank shall remain unaltered after the liquid mass splitting into sloshing and non-sloshing parts. |
| 3 | The pendulum motion shall not be planar (i.e., there is a universal joint at the hinge point). |
| 4 | Sloshing parameters shall be time-varying depending on the tank filling level. |
| 5 | Up to three sloshing modes shall be supported. |
| 6 | The sloshing motion shall be inhibited during simulation under non-accelerated phases to avoid nonphysical dynamics of the pendula. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farì, S.; Sagliano, M.; Macés Hernández, J.A.; Schneider, A.; Heidecker, A.; Schlotterer, M.; Woicke, S. Physical Modeling and Simulation of Reusable Rockets for GNC Verification and Validation. Aerospace 2024, 11, 337. https://doi.org/10.3390/aerospace11050337
Farì S, Sagliano M, Macés Hernández JA, Schneider A, Heidecker A, Schlotterer M, Woicke S. Physical Modeling and Simulation of Reusable Rockets for GNC Verification and Validation. Aerospace. 2024; 11(5):337. https://doi.org/10.3390/aerospace11050337
Chicago/Turabian StyleFarì, Stefano, Marco Sagliano, José Alfredo Macés Hernández, Anton Schneider, Ansgar Heidecker, Markus Schlotterer, and Svenja Woicke. 2024. "Physical Modeling and Simulation of Reusable Rockets for GNC Verification and Validation" Aerospace 11, no. 5: 337. https://doi.org/10.3390/aerospace11050337