Abstract
Asset monitoring, specifically infrastructure monitoring such as water distribution pipelines, is becoming increasingly critical for utility owners who face new challenges due to an aging network. In the UK alone, during the period of 2009–2010, approximately 3281 mega litres (106) of water were wasted due to failure or leaks in water pipelines. Various techniques can be used for the monitoring of water distribution networks. This paper presents the design, development and testing of a smart wireless sensor network for leak detection in water pipelines, based on the measurement of relative indirect pressure changes in plastic pipes. Power consumption of the sensor nodes is minimised to 2.2 μW based on one measurement every 6 h in order to prolong the lifetime of the network and increase the sensor nodes’ compatibility with current levels of power available by energy harvesting methods and long life batteries. A novel pressure sensing method is investigated for its performance and capabilities by both laboratory and field trials. The sensors were capable of measuring pressure changes due to leaks. These pressure profiles can also be used to locate the leaks.
1. Introduction
Infrastructure monitoring has been an attractive subject for researchers in recent years. Advances in electronics and decreases in the cost of sensors and electrical components have made smart infrastructures a reality. Moreover, the proliferation of the internet has opened up new applications for the “internet of things” to serve as a backbone for infrastructure monitoring [1,2,3]. One of the main issues in infrastructure monitoring is power consumption and power availability. Power consumption of sensor nodes should be optimised while keeping their functionality to a suitable level. Another issue in the field of infrastructure monitoring, especially large scale infrastructure such as water pipe networks, is data handling. The sensor node in these systems should be capable of handling the produced data locally and then send the processed data to the control centre in order to minimise the required post processing and transmission packet size.
Pipeline systems are responsible for transporting vital materials such as water, oil and gas. Any leakage in the pipe can cause major financial losses and possible environmental damages. Currently, buried pipelines are only monitored at key points, which can be spaced several kilometres apart. A system with a higher spatial resolution would provide operators with a better understanding of their network.
In buried pipeline monitoring, sensor nodes are deployed in soil. The underground environment imposes major limitations on sensor nodes, such as poor RF transmission and lack of maintainability. Digging trenches in order to repair or replace nodes is extremely costly; therefore sensor nodes should have a long operational life without any maintenance. This means that sensor nodes are required to be robust and consume a small amount of energy in order to last their desired lifetime.
Despite the limitations, Underground Wireless Sensor Networks (UWSN) have a wide range of applications [4,5,6]. Pipeline monitoring is one of the main areas in which UWSN can be used. A suitable UWSN for pipeline monitoring should be easy to deploy on existing and new pipes. Measurements of the pipes’ condition should also be non-invasive to the pipe in order to maintain the structural integrity of the pipeline. This creates a need to design and develop new methods of measuring pipeline characteristics in order to monitor their structural integrity.
Various methods are used in order to detect and locate leaks in pipes [7]. The main methods for pipe monitoring are acoustic measurements, pressure measurements, vision based systems, ground penetrating radar (GPR) based systems, fibre optic monitoring and multimodal systems.
Vision based systems use a PIG (pipeline inspection gauge) with a form of image processing or laser scanning in order to find cracks and faults in pipelines [8]. These systems require access to the interior of the pipe to operate and only take measurements at long time intervals as it is costly to insert the PIGS into the pipe. Moreover they require high processing power or a skilled operator to analyse the results [9].
A vast amount of literature and research exists regarding the use of acoustic or vibration measurements for pipeline monitoring [5,10,11,12,13,14,15,16]. The majority of these methods are based on the detection of the acoustic emissions from the pipe. The frequency and magnitude of these signals depends on pipe pressure, leak diameter and type of fluid inside the pipe [5]. These signals are then detected by hydrophones or accelerometers [10]. The location of the leak then can be calculated by different cross correlation methods. Although these systems look promising they have some disadvantages, which make them currently not suitable to be deployed as a buried wireless sensor network system. Measuring the acoustic signal requires a high sampling rate which makes the nodes consume more power and last a shorter amount of time on the limited power supply available. These methods also produce large data sets and require complex processing algorithms which also increase the power consumption of the sensor nodes.
GPR based systems can be used to non-invasively (both to the pipe and surface) detect leaks in the pipes [17]. However performance and detection reliability of these systems is highly dependent on the soil type and condition and they are more suited to dry soils. Moreover, these systems are not suitable for continuous monitoring of large pipe networks (thousands of metres of pipes).
Fibre optic technology can potentially solve the major problems with current pipeline monitoring systems. There are many research projects with different levels of success regarding the use of fibre optics in structural health monitoring [18,19,20,21,22]. Fibre optic cables can be deployed over long distances (few kilometres) to detect leaks or measure temperatures and strains in the pipes [11,13]. This makes it a suitable technique for pipeline monitoring. Moreover, different types of measurements can be taken via embedded fibre optic sensors. A major fundamental disadvantage of these systems is the potential for redundancy, which currently makes them unsuitable for general adaptation in pipeline monitoring. If, for any reason, a section of the pipe is damaged or it is required to be replaced, the fibre optic system after that location could be potentially put out of service. Moreover, the fibre optic systems are difficult to install and are usually required to be installed while the pipe is being constructed. Furthermore retro fitting of these systems in the case of damage to the fibre can be difficult, uneconomic and potentially can cause blind spots in the system [21].
A multimodal Underground Wireless Sensor Network (UWSN) using low power sensors offers a good solution to the mentioned issues. Dense deployment allows these systems to have an acceptable level of redundancy within the system. Underground wireless sensor networks offer many advantages over the other methods, such as concealment, ease of deployment, retro fitting, reliability and coverage density [23]. Sensor nodes can be retro fitted to the existing pipes individually without the need for a continuous trench. Moreover, flexibility of deployment makes spot monitoring possible where pipe monitoring is only required for a limited section of the pipe.
This paper reports on the design and development of a multimodal Underground Wireless Sensor Network (UWSN) for pipeline structural health monitoring. A non-invasive method (to the structure of the pipe) of pressure monitoring is designed and developed based on Force Sensitive Resistor (FSR) technology. This method is then tested and validated in laboratory and field trials. Moreover, power consumption requirements of a suitable UWSN are identified and based on these findings an ultra-low power wireless sensor node is designed and developed.
2. System Design
A wireless sensor network can have different topologies and structures. The restrictive environment of a buried pipeline enforces many limitations on the overall structure of the UWSN. The RF transmission range in soil is significantly lower than in air, therefore communication between nodes is much more limited. This imposes limitations on routing protocols and the overall structure of the UWSN. Moreover, the topology of the network is restricted by the topology of the pipeline. Figure 1 illustrates the general schematics of the proposed UWSN for pipeline monitoring. In the proposed UWSN each node communicates with both nodes in front and behind itself via RF signals. For every 4–5 nodes (up to maximum of 10 nodes) there is a master node which has the capability to communicate with the sensor nodes via RF transmission. Moreover, these master nodes should be able to connect to the internet and transmit the received data from the nodes to the cloud. Data in the cloud can then be accessed via different devices with internet connectivity.
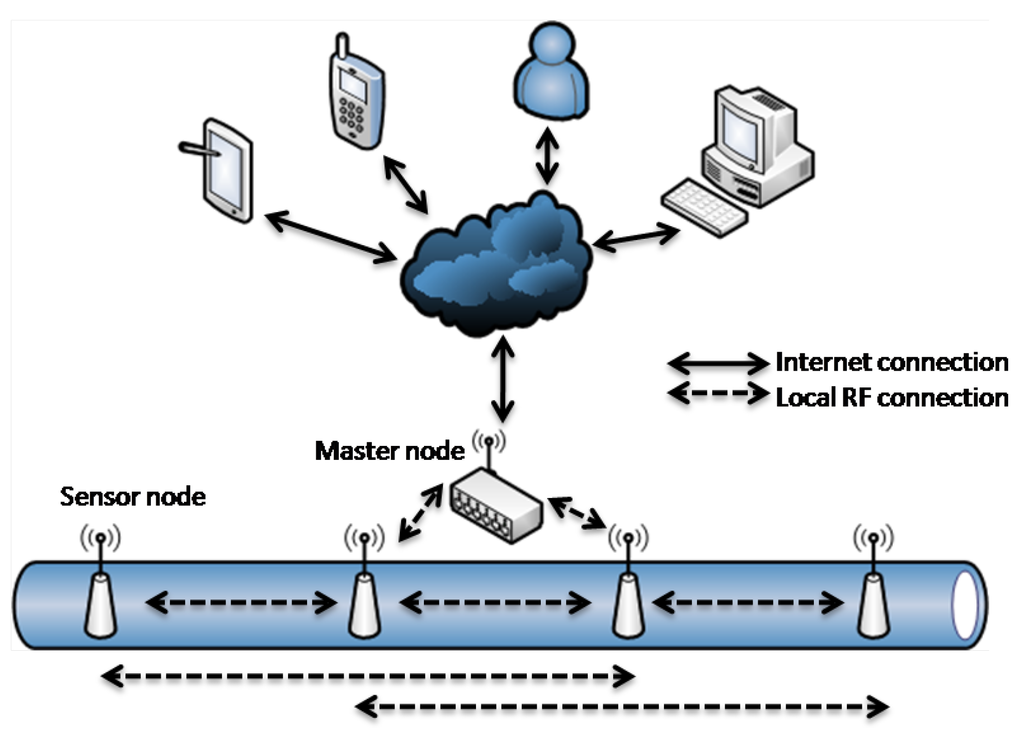
Figure 1.
General schematic of the proposed Underground Wireless Sensor Network (UWSN) for a pipeline monitoring system.
2.1. Processing Unit and Transmission
Individual sensor nodes commonly have four main parts: a data gathering and processing unit, transmission unit, power management and sensors. Performance of each of these sections in terms of power consumption and reliability greatly affects the overall performance of the sensor nodes and network.
Figure 2 illustrates a general schematic of different sections of the proposed sensor node for pipeline monitoring.
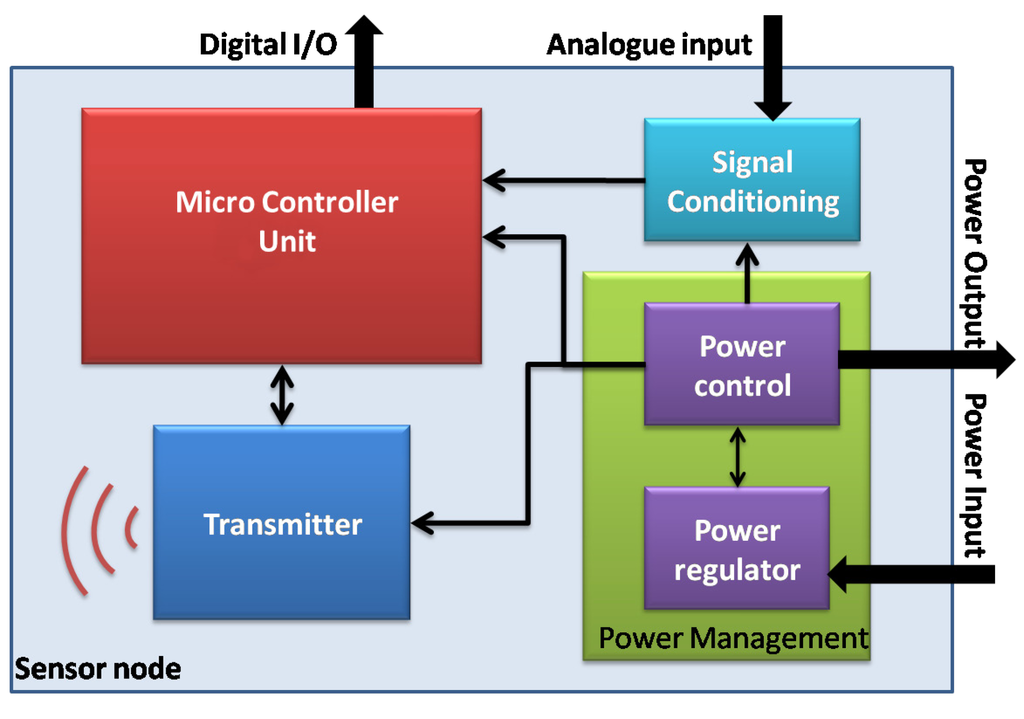
Figure 2.
Schematic of the sensor node and its components.
The Micro Controller Unit (MCU) is responsible for gathering measurements from the sensors, processing data, managing the power regime of the nodes and sending data to the transmitter. The performance of the MCU highly affects the overall performance of the node. A careful balance between the processing capability and power consumption is required to achieve optimum overall performance.
The power management unit is responsible for converting the input voltage from the battery to a usable voltage for the MCU and other components.
The Transmitter is one of the main parts of any sensor node. This unit is responsible for transmission of the data which is collected by MCU to other nodes via RF signals.
Signal conditioning is composed of a voltage divider circuitry and passive filters to regulate and condition the signals from the sensors before they are transferred to the analogue to digital converter in the MCU. Another aspect which affects the performance of the sensor node is its firmware. This can greatly affect both the power consumption and reliability. Figure 3 illustrates the latest version of the sensor node without packaging.
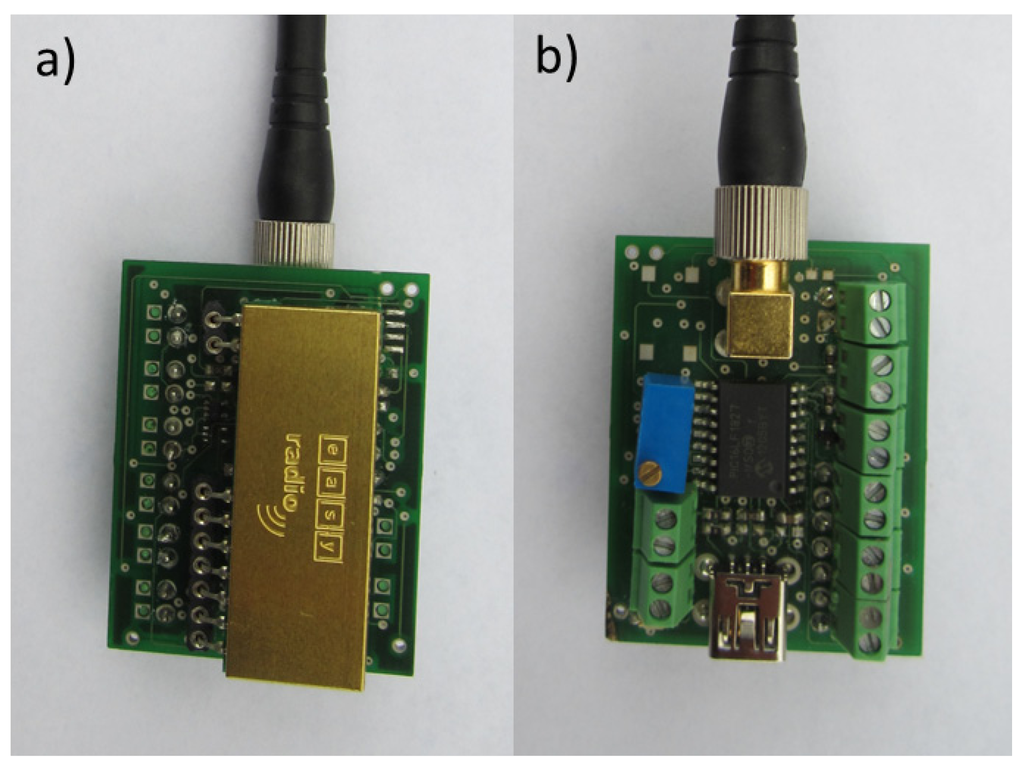
Figure 3.
(a) Rear view of the sensor node; (b) Front view of the sensor node.
The sensor node illustrated in Figure 3 was designed and developed based on commercially available components in order to keep the overall costs down. In choosing the components special attention was given to power consumption. The MCU of the sensor node plays a major role in its power consumption; a PIC16LF1827 microcontroller was selected for its low power consumption characteristics (nano Watt XLP Technology). The main feature of this microcontroller is its low power consumption during sleep mode. This is especially important as the node will spend most of its time in sleep mode. The other main component of the sensor node is its RF transceiver; an eRA400TRS 433 MHz transceiver was selected for its low power requirements and flexible firmware.
2.2. Power Consumption
Power consumption is the most challenging aspect of the UWSN. Ultra-low power consumption will allow the sensor node to operate for an extended period (in excess of the shelf life of the battery) of time without the need for battery replacement. Various parts of the UWSN can affect the power consumption. The environment in which the sensor nodes are being deployed also imposes restrictions on the design (i.e., lack of maintainability, lack of access to common power supplies, etc.).
Structural conditions of pipes change, in most cases very slowly so there is no need for a high sampling frequency; therefore these nodes will spend most of their time in sleep mode. This makes the sleep power consumption of the components very important [24]. Figure 4 shows a general schematic of the sensor node routine.
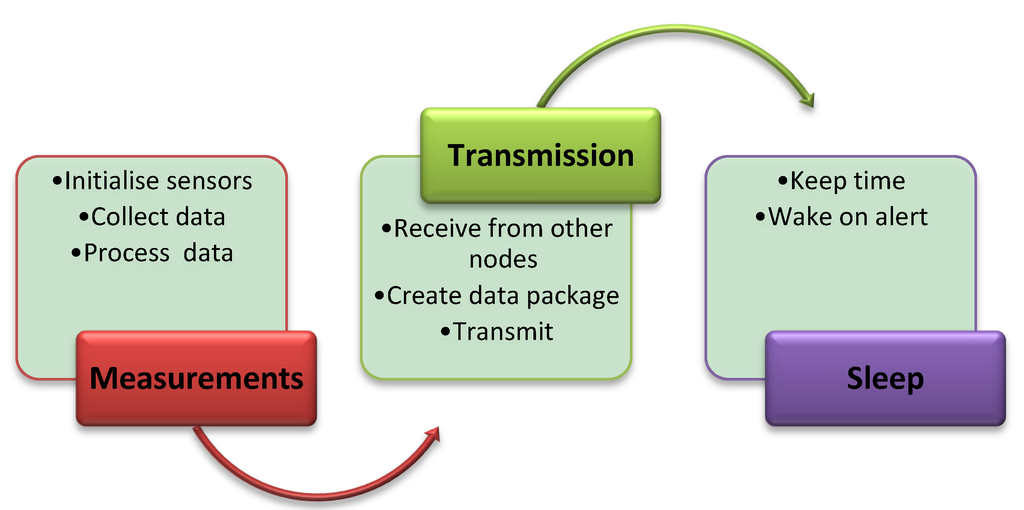
Figure 4.
Schematic of the sensor node routine.
During the sleep period the MCU of the sensor node cuts power to all components in order to minimise power consumption. Unnecessary internal functions of the MCU are also disabled during the sleep mode. The time the nodes spend in sleep mode is managed by a watchdog timer module in the MCU. This timer allows the MCU to keep time while it is in sleep mode and wakes up after a programmable interval. Figure 5 illustrates the power consumption profile of the sensor node.
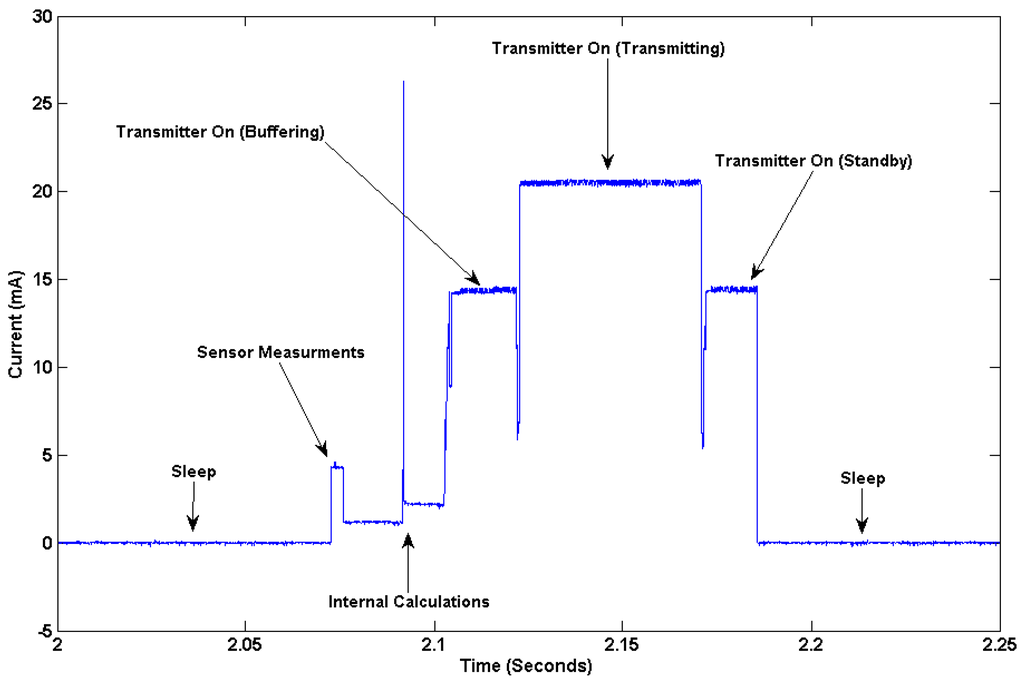
Figure 5.
Power consumption profile of the sensor node during one cycle at 2.5 V.
The hardware and software design of the nodes allow it to operate at only 2.2 μW for one transmission per 6 h. This enables the node to have a theoretical lifetime of more than 100 years on the equivalent energy stored within two AA size lithium iron batteries. This indicates that the operating lifetime of the sensor nodes is limited by the lifetime of the batteries and not by its power consumption.
2.3. Sensors
The ideal sensor for pipeline monitoring should be non-invasive to the pipe, low in power consumption and easy to install. Furthermore, they should be able to gather useful information without extensive data processing or high sampling rates.
One of the key parameters in pipeline monitoring is the internal pressure of the pipe. Leaks or blockages can potentially alter the normal pressure in the pipe and hence monitoring the pressure can potentially help to identify these. Temperature measurements of a pipe and its surroundings can also provide useful data in pipeline monitoring. A slow leak might not have a major effect on the internal pressure of the pipe, but it can potentially change its surrounding temperature profile.
Common pressure sensors used to measure the pressure inside water pipes require pressure tappings or special valves that allow access to the sensor to the inside of the pipe. This can have a negative effect on the structure of the pipe and is not suitable for certain types of pipe (e.g., old PVC pipes, older more brittle cast iron, glass reinforced or asbestos cement pipes). A novel, relative pressure sensing method based on force sensitive resistors (FSR) is used for pressure measurements in the proposed UWSN for pipeline monitoring [25]. This system operates based on the principle of a changing diameter of the pipe caused by an internal pressure change. Figure 6 shows a schematic of the sensor node assembly.
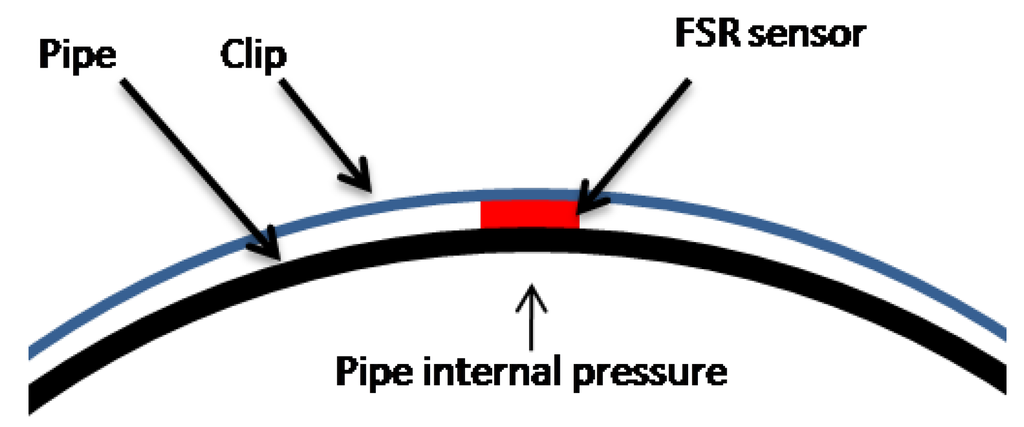
Figure 6.
Schematic of the pressure sensor assembly FSR sensor.
In the proposed sensor node assembly the FSR sensor is attached to the outside of a pipe with a clip whose Young’s modulus should be greater than that of the pipe. The clip is initially tightened to fix the FSR sensor to the pipe. All pipes expand to some extent when they are pressurised. Pressure in the pipe causes a contact force between the pipe and the clip. This contact force is then measured by the FSR sensor and relative internal pressure changes can be calculated from this force. This contact force is also dependent on the pipe diameter, pipe thickness, pipe material, clip material, clip diameter and clip thickness. Equation (1) can be used to calculate the contact pressure between the pipe and clip Pc, where p(Pa) is the internal pressure of the pipe, rp(m) is the radius of the pipe, rj(m) is the radius of the clip, Ep(Pa) is the Young’s modulus of the pipe, Ej(Pa) is the Young's modulus of the clip, tp(m) and tj(m) are the thickness of the pipe and clip respectively.
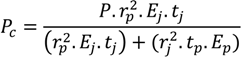
The contact force on the sensor Fc(N) can then be calculated from Equation (2), where As(m2) is the area of the sensor and K is a constant between 0 and 1 which indicates the fraction of the contact pressure which is applied to the sensor.
Fc = K.Pc.As
From Equations (1) and (2) it can be concluded that a change in pressure will result in a change in the force which is applied on the sensor. This will result in a change in resistance of the FSR. This change in resistance is then measured by the sensor nodes’ analogue to digital converter through a voltage divider. The performance of the proposed pressure sensor assembly was compared to a commercial pressure sensor in order to validate its suitability and reliability in plastic pipes; which are currently the most common type of newly installed pipes in water distribution [25]. In these tests a 152 mm diameter PVC pipe was pressurised from 0 to 4 bars and the pressure was measured simultaneously using both a direct pressure sensor and the FSR based relative pressure assembly. Results from this study showed a high correlation between data from the commercial sensor and the proposed FSR based sensor (an R-squared value of 0.9905 was obtained for these tests). More details of these tests can be found in [26]. The working domain of the proposed sensor assembly for different pipe materials and dimensions was calculated using a MATLAB script based on Equation (1). Figure 7 shows the resultant force on the sensor for different pipe dimensions at 1 bar pressure for an MDPE (medium density polyethylene) and a cast iron pipe.
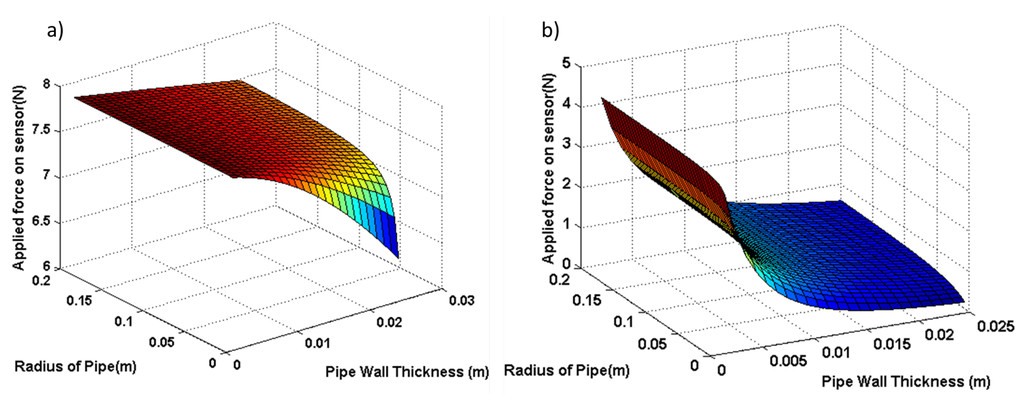
Figure 7.
Resultant force on the sensor at 1 bar for (a) a medium density polyethylene (MDPE) pipe and (b) a cast iron pipe.
As is shown in Figure 7 the resultant force on the sensor is higher for the MDPE pipe (Figure 3a) than the cast iron pipe (Figure 3b). It can also be seen that the force drops rapidly with increasing pipe wall thickness for the cast iron pipe as it becomes much stiffer. Hence, the model indicates that the proposed sensor is more suitable in the pressure monitoring of plastic pipes, however it can still be used for metallic pipes of certain dimensions. One way of increasing the force measured by the FSR sensor is to increase the Young’s modulus of the clip and make this much stiffer than the Young’s modulus of the pipe itself.
As demonstrated, the sensitivity of the FSR based pressure sensor depends on various factors such as pipe wall thickness, material properties and diameter. Therefore, the sensitivity of the pressure FSR based sensor should be calculated based on the application parameters. As an example, during validation tests mentioned earlier, the pressure sensor exhibited a sensitivity of 87.6 mV/bar for a 152 mm diameter PVC pipe, with a wall thickness of 10 mm.
Temperature measurements of the pipe’s surroundings and the pipe wall can potentially generate useful information in leak detection and its localisation. Water leaking from a pipe into the ground can potentially change the local temperature profile in the ground compared with measurements from other nodes further away from the leak. In addition, changes in water flow through a pipe can change the temperature of the pipe wall compared to the temperature of the ambient soil around the pipe as the water has different retention times in the pipe. Therefore, temperature data in conjunction with pressure data can potentially be used to detect and localise leaks and differentiate those from other pressure changes in the system. A commercial temperature sensor (LM35) was used to detect temperature fluctuations of a pipe in this research and assess the hypothesis. The temperature sensors used in this research are analogue sensors therefore they are connected to the node via the ADC channel of the node (similar to the FSR sensor). They are non-invasively mounted on the pipe wall via a clip. Moreover, during cold periods temperature information can be used to prevent failure of pipes due to low pipe wall temperature (water companies can use temperature data to manage the water temperature in the pipe and prevent pipe failure, i.e., they pass warm water into the pipes).
3. Leak Detection Experimental Setup
3.1. Laboratory Tests
A laboratory based test bench system was designed and developed in order to test the capabilities of the proposed non-invasive (to the pipe) pressure sensor assembly to detect and locate leaks. This system consists of a U shaped section made of 40 mm PVC pipe with a simulated leak in the middle section (Figure 8). Water was circulated in the system by a common water pump capable of providing up to 3 bars of pressure. A hole with a diameter of 10 mm was made in the middle section of one of the PVC pipe sections as shown in Figure 8. This hole was plugged with a rubber insert which would pop out after a random amount of time, resulting in a leak in the pipe initially, but at the time the rubber insert pops out, it behaves more like a small burst.
Figure 8 shows five FSR sensors attached to the PVC pipe sections at 2 m intervals. Sensors 1, 2 and 3 were located before the leak and Sensors 4 and 5 were located after the leak. Each sensor was secured on the pipe with a stainless steel jubilee clip. Signals from the FSR based pressure assemblies were recorded at 100 samples per second for each sensor using a Labjack U3 data acquisition device. The high data rates for this experiment allowed the identification of the optimum sampling rate for the FSR.
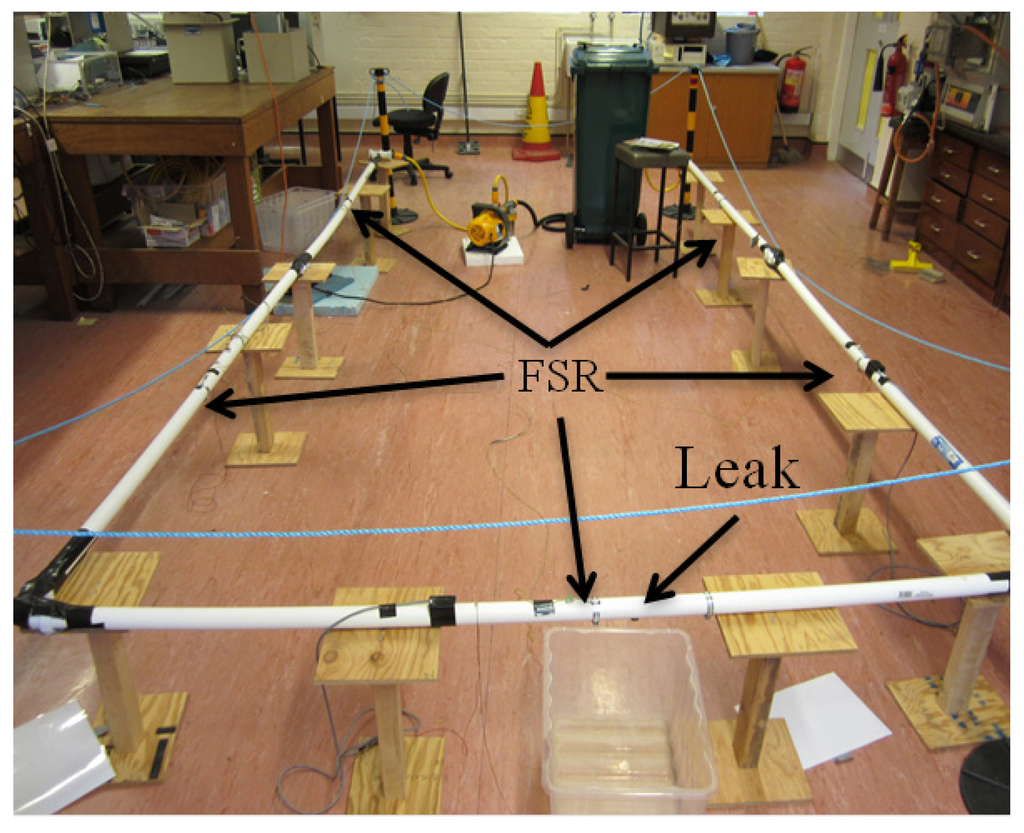
Figure 8.
Photo of the laboratory test setup for leak detection.
3.2. Field Trials
In order to fully evaluate the performance of the nodes and sensors in real life conditions they were deployed on a leak testing facility (connected to the main water supply). Each node was connected to two temperature sensors and one FSR based pressure sensor. One of the temperature sensors was attached directly to the pipe to measure the pipe wall temperature while the other temperature sensor was located approximately 30 cm away from the pipe in order to measure the soil temperature surrounding the pipe. Each sensor node measured all three parameters every 1,027 s (approximately 17 min) and transmitted the values to the mother node located in a building close to the nodes. These data were then logged locally and shared via the internet with other devices. Figure 9 shows the nodes installed on the pipe with sensors attached to the pipe and in the surrounding soil.
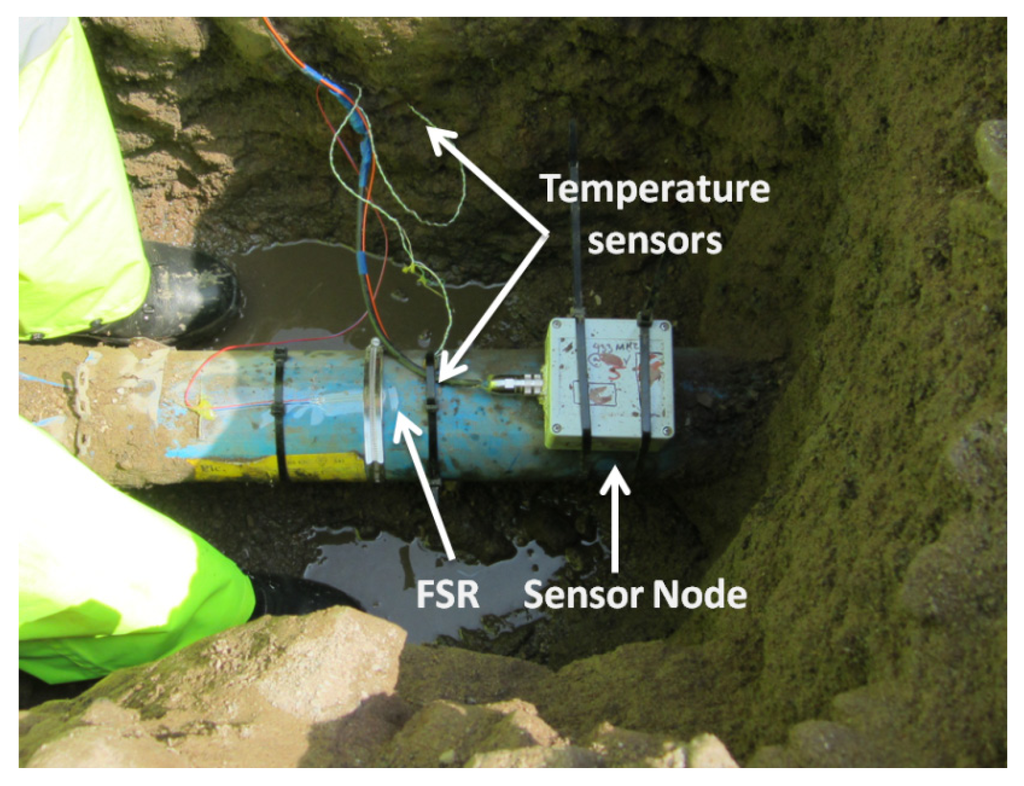
Figure 9.
Sensor node and its sensors attached to the pipe on a leak test facility.
4. Results and Discussion
The proposed leak detection method is based on the relative pressure change profile in the pipe; therefore it is unnecessary to calibrate the sensors. Raw data from the sensors in laboratory tests are illustrated in Figure 10. As can be seen from this figure four main phases of the experiment (pump start, stabilization, leak, pump off) are clearly visible from the output of the pressure sensors. These include the pressure before the pump was switched on, the increase in pressure when the pump was switched on, the drop in pressure due to the development of the leak and finally the drop in pressure due to the switching off of the pump (shortly after development of the leak).
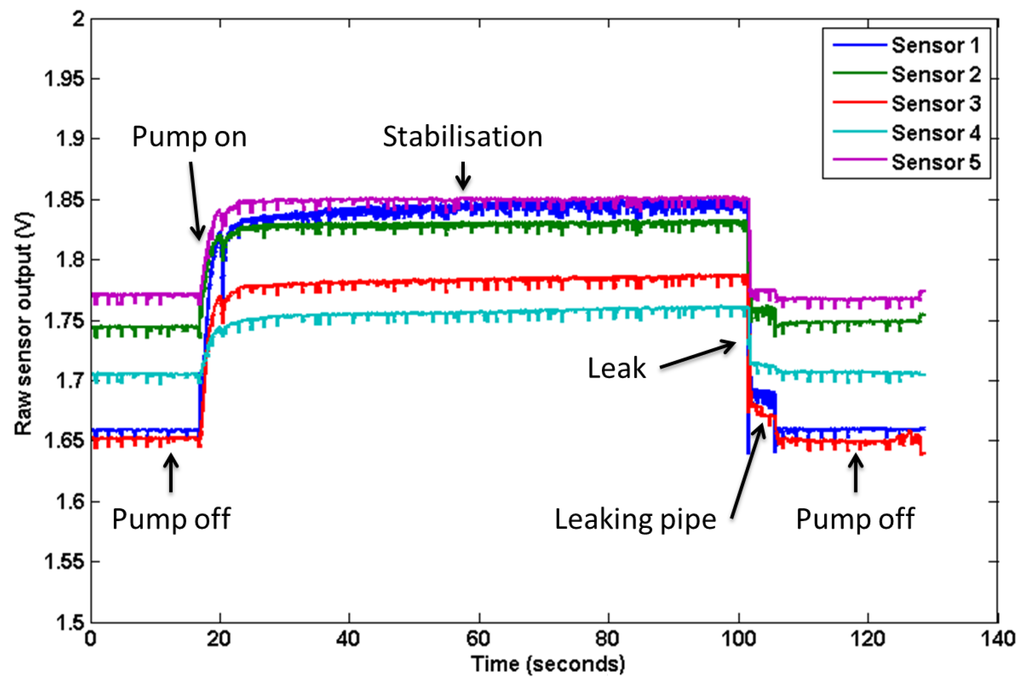
Figure 10.
Raw sensor output of laboratory experiment illustrating the pressure profiles for the five FSR sensors.
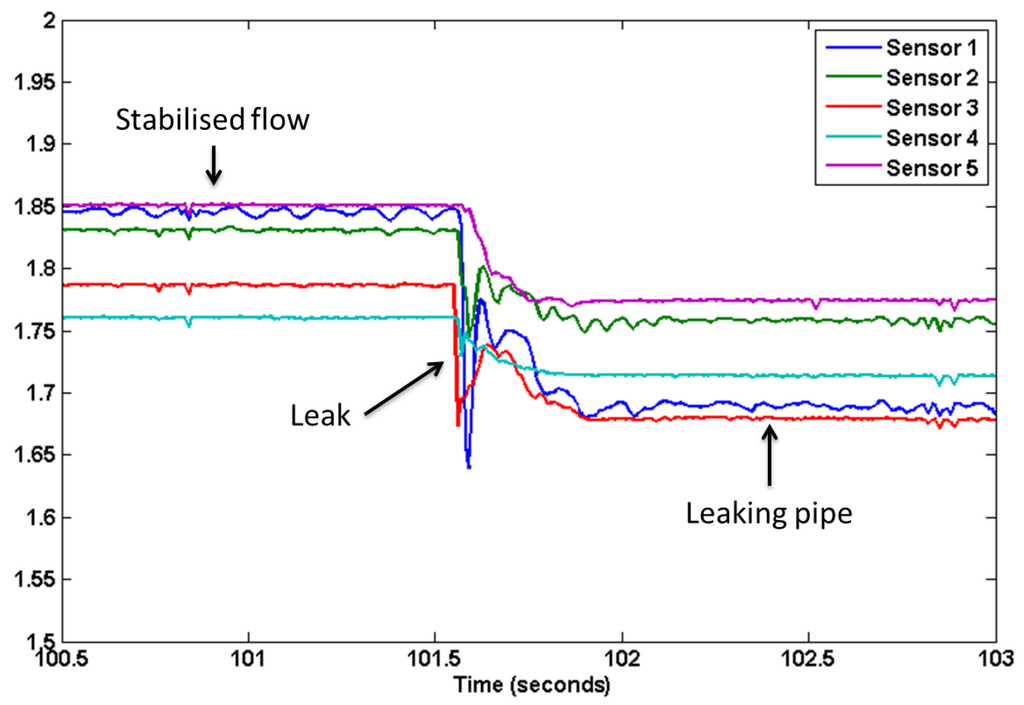
Figure 11.
Pressure drop measured by the five FSR sensors due to the occurrence of the leak.
It can be clearly seen from Figure 10 that the simulated burst can be detected from the sensors’ raw output as a sudden pressure drop in the system. However, based on Figure 10 it is difficult to determine the exact position of the leak as all FSR sensors appear to respond similarly to the leak.
Figure 11 shows a close-up of the pressure drop due to the burst. It can be seen from this figure that the pressure profiles of Sensors 4 and 5, which are downstream to the leak point, are different to the ones upstream of the leak. The profile for theses sensors exhibit a more gradual pressure drop profile than the ones before the leak. This difference can be used to determine the approximate location of the leak, i.e., it is somewhere between Sensors 3 and 4 in this case.
In addition to the detection of a burst in the laboratory test, the FSR based pressure sensors successfully registered daily pressure variations in the pipes in the field trials. Figure 12 illustrates relative pressure data and temperature readings from a sensor node for a period of three days over which leak tests were carried out. During these tests various service valves were opened and closed as part of a valve training programme at the test site. Data presented in this figure are from a node attached to a 90 mm diameter MDPE pipe.
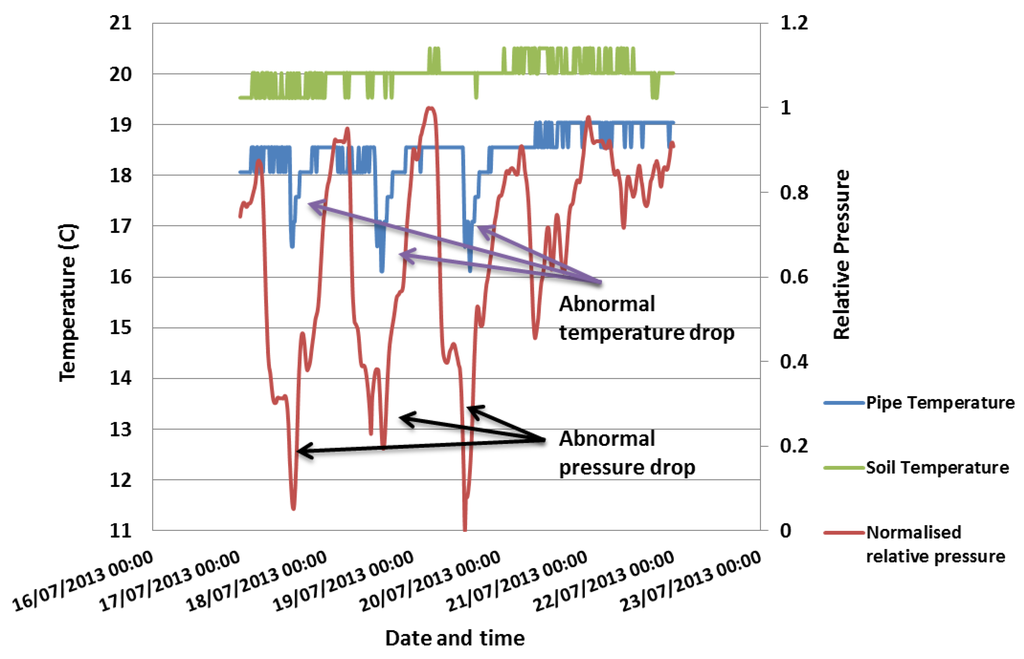
Figure 12.
Sensor reading from one of the nodes attached to a 90 mm MDPE pipe for a period of five days.
As can be seen from Figure 12, the proposed non-intrusive pressure sensor clearly registered the daily pressure variations in the pipe. Valve trainings were carried out on three consecutive days and clearly show themselves by an abnormal pressure drop, further than normal daily relative pressure variations (0.4–0.95). In addition, it was noticed that the pipe wall temperature (blue line) dropped significantly at the same time and behaved differently to the temperature measurements in the soil. In contrast, on the 21st July 2013 a pressure drop was recorded, with no corresponding temperature drop of the pipe wall. On this occasion, the pressure drop was not due to a leakage test, but simply a pressure change in the overall system (within daily pressure variation). The drop in temperature of the pipe wall for a leak is caused by a reduced residence time of the water in the pipe. Although the temperature sensors were never intended to be used for leak detection, Figure 12 shows the potential of using the temperature data in combination with the FSR data to differentiate leaks from other pressure changes in the system, especially when analyzing individual node locations and not taking the whole sensor network into account as shown in the laboratory tests. However, further tests are necessary to completely verify this hypothesis. Furthermore, the temperature measurements can also provide the operator with useful information to protect their assets in the winter. The proposed leak detection method is designed to identify leaks which create a change in the normal local pressure profile of the pipe (i.e., the sensor ‘learns’ what is ‘normal’ for that section of pipe on a daily basis and only warns of a potential leak if the relative pressure value goes outside this normal range). Therefore, the minimum size of a leak which could be detected depends on pipe geometry and material and the operational parameters (pressure managed system, PRV controlled, etc.). One of the main benefits of the relative pressure change compared to absolute pressure reading is that the results are less affected by error. Environmental factors such as degradation of the clip holding the FSR sensor and gradual loss of the contact pressure due to relaxation of the clip can potentially cause errors in readings. However this will not affect the leak detection method dramatically as it can be compensated for in the leak detection algorithm, i.e., this will be gradual and potentially happen over an extended period of time and will be different from the sensor’s response to a leak. Furthermore, it is important to realize that for leak detection not only measurements from a single sensor will be investigated, but also the data from neighboring nodes, as shown in the laboratory tests, in order to differentiate between a pressure drop due to a leak and those in the system.
5. Conclusions
Wireless smart sensor networks are a viable solution for monitoring the condition, in particular the pressure and hence leaks, of buried water pipelines. Their advantage over other commonly used leak detection methods is that they have a degree of redundancy as individual faulty nodes do not render the whole system obsolete and allow for continuous monitoring without operator intervention. Ultra-low power smart wireless sensor networks allow them to stay operational for extended periods of time without maintenance. This makes them now viable for both existing and novel power supplies. The ultra-low power consumption of 2 μW was achieved by a careful hardware selection and also adaptation of the firmware.
A non-invasive (to the pipe) pressure measurement method based on FSR sensors has been presented. This method allows easy installation of the sensor nodes on pipes without jeopardizing the pipes’ structural integrity. The FSR sensors detected pressure changes both in the laboratory tests as well as in the field trials. The laboratory data showed that the profile of the pressure drop caused by the leak is different for the measurements before and after the leak. This might be used to determine the location of the leak. The sensor nodes were successfully deployed in field trials and they collected temperature and relative pressure data. Leak tests and daily pressure variations were clearly registered by the nodes showing a response in both the relative pressure sensor (FSR) as well as the temperature sensors. It is postulated that the temperature sensors have the potential to be combined with the FSR data to identify leaks as opposed to ‘normal’ pressure drops. This further validates the potential of UWSNs for pipeline monitoring.
Acknowledgments
The authors gratefully acknowledge the support by the University of Birmingham and UK Water Industry Research (UKWIR) who jointly funded this project.
Author Contributions
All authors have contributed equally to the paper preparation.
Conflict of Interest
The authors declare no conflict of interest.
References
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Miorandi, D.; Sicari, S.; De Pellegrini, F.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 1497–1516. [Google Scholar] [CrossRef]
- Christin, D.; Reinhardt, A.; Mogre, P.S.; Steinmetz, R. Wireless Sensor Networks and the Internet of Things : Selected Challenges. In Proceedings of the 8th GI/ITG KuVS Fachgespräch Drahtlose Sensornetze, Hamburg, Germany, August 2009; pp. 31–33.
- Yu, X.; Wu, P.; Han, W.; Zhang, Z. Overview of wireless underground sensor networks for agriculture. Afr. J. Biotechnol. 2012, 11, 3942–3948. [Google Scholar]
- Hieu, B.; Choi, S.; Kim, Y.U.; Park, Y.; Jeong, T. Wireless transmission of acoustic emission signals for real-time monitoring of leakage in underground pipes. KSCE J. Civ. Eng. 2011, 15, 805–812. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Sun, Z.; Vuran, M.C. Signal propagation techniques for wireless underground communication networks. Phys. Commun. 2009, 2, 167–183. [Google Scholar] [CrossRef]
- Liu, Z.; Kleiner, Y. State-of-the-art review of technologies for pipe structural health monitoring. IEEE Sens. J. 2012, 12, 1987–1992. [Google Scholar] [CrossRef]
- Kingajay, M.; Jitson, T. Real-time laser monitoring based on pipe detective operation. Proc. World Acad. Sci. Eng. Technol. 2008, 44, 127–132. [Google Scholar]
- Sinha, S.K.; Knight, M.A. Intelligent system for condition monitoring of underground pipelines. Comput. Civ. Infrastruct. Eng. 2004, 19, 42–53. [Google Scholar]
- Gao, Y.; Brennan, M.; Joseph, P.; Muggleton, J.; Hunaidi, O. On the selection of acoustic/vibration sensors for leak detection in plastic water pipes. J. Sound Vib. 2005, 283, 927–941. [Google Scholar] [CrossRef]
- Khulief, Y.A.; Khalifa, A.; Ben Mansour, R.; Habib, M.A. Acoustic detection of leaks in water pipelines using measurements inside pipe. J. Pipeline Syst. Eng. Pract. 2012, 3, 47–54. [Google Scholar] [CrossRef]
- Stoianov, I.; Nachman, L.; Madden, S.; Tokmouline, T.; Csail, M. PIPENET: A Wireless Sensor Network for Pipeline Monitoring. In Proceedings of IEEE the 6th International Symposium on Information Processing in Sensor Networks (IPSN 2007), MA, USA, 25–27 April 2007; pp. 264–273.
- Ahadi, M.; Bakhtiar, M.S. Leak detection in water-filled plastic pipes through the application of tuned wavelet transforms to Acoustic Emission signals. Appl. Acoust. 2010, 71, 634–639. [Google Scholar] [CrossRef]
- Muggleton, J.M.; Brennan, M.J. Leak noise propagation and attenuation in submerged plastic water pipes. J. Sound Vib. 2004, 278, 527–537. [Google Scholar] [CrossRef]
- Muggleton, J.M.; Brennan, M.J.; Pinnington, R.J.; Gao, Y. A novel sensor for measuring the acoustic pressure in buried plastic water pipes. J. Sound Vib. 2006, 295, 1085–1098. [Google Scholar] [CrossRef]
- Gao, Y.; Brennan, M.J.; Joseph, P.F.; Muggleton, J.M.; Hunaidi, O. A model of the correlation function of leak noise in buried plastic pipes. J. Sound Vib. 2004, 277, 133–148. [Google Scholar] [CrossRef]
- Nakhkash, M. Water Leak Detection Using Ground Penetrating Radar. In Proceedings of the 10th International Conference on Ground Penetrating Radar, Delft, The Netherlands, 21–24 June 2004; pp. 525–528.
- Li, H.-N.; Li, D.-S.; Song, G.-B. Recent applications of fiber optic sensors to health monitoring in civil engineering. Eng. Struct. 2004, 26, 1647–1657. [Google Scholar] [CrossRef]
- Yan, S.Z.; Chyan, L.S. Performance enhancement of BOTDR fiber optic sensor for oil and gas pipeline monitoring. Opt. Fiber Technol. 2010, 16, 100–109. [Google Scholar] [CrossRef]
- Nikles, M. Long-distance fiber optic sensing solutions for pipeline leakage, intrusion and ground movement detection. Proc. SPIE 2009, vol. 7316, 731602–731613. [Google Scholar] [CrossRef]
- Myles, A. Permanent Leak Detection on Pipes using a Fibre Optic Based Continuous Sensor Technology. In Proceedings of Pipelines Conference 2011: A Sound Conduit for Sharing Solutions, WA, USA, 23–27 July 2011; pp. 744–754.
- López-higuera, J.M.; Cobo, L.R.; Incera, A.Q.; Cobo, A. Fiber optic sensors in structural health monitoring. J. Light. Technol. 2011, 29, 587–608. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Stuntebeck, E.P. Wireless underground sensor networks: Research challenges. Ad Hoc Netw. 2006, 4, 669–686. [Google Scholar] [CrossRef]
- Walton, R.; Sadeghioon, A.M.; Metje, N.; Chapman, D.; Ward, M. Smart Pipes: The Future for Proactive Asset Management. In Proceedings of the International Conference on Pipelines and Trenchless Technology, Beijing, China, 26–29 October 2011; pp. 1512–1523.
- Metje, N.; Chapman, D.N.; Metje, N.; Walton, R.; Sadeghioon, A.M.; Ward, M. Real time condition monitoring of buried water pipes. Tunn. Undergr. Sp. Technol. 2012, 28, 315–320. [Google Scholar] [CrossRef]
- Sadeghioon, A.M.; Walton, R.; Chapman, D.; Metje, N.; Anthony, C.; Ward, M. Design and development of a non intrusive pressure measurement system for pipeline monitoring. J. Pipeline Syst. Eng. Pract. 2014. (Accepted awaiting publication). [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).