1. Introduction
Benefiting from the rapid developments of positioning and monitoring technology, along with the extensive real-time collection of registering data in banks, restaurants, recreation venues, mobile telecoms and transportation sites [
1], law enforcement has been endowed with the capability to monitor the location information of suspects’ social activities in recent years. These mobility data can be utilized to not only reveal suspects’ social and offending behavior preferences but also probe multiple crime incentives under different geographical environments. Furthermore, the ability to predict suspect location by mining spatiotemporal patterns from such mobility data can serve as a valuable source of knowledge for law enforcement from both tactical and strategic perspectives, such as assessing the correlation of suspects and crime locations, discovering gang members, and detecting “crime dark figures” [
2,
3].
Location prediction of an individual offender is known as Crime Geographic Profiling (CGP), which is increasingly utilized by police and law enforcements to make predictions regarding the spatial distribution of the anchor point (residence or next crime place) where the perpetrator of a series of offences might be most likely to stay [
3] on the basis of historical crime locations [
4], land-use types [
5], crime categories [
5] or road networks [
6], with the models originating from the distance decay function [
6], Bayesian theorem [
7], logistic regression [
8], and least-effort principle and kinetic theorem [
9].
However, the existing research on CGP still has the following deficiencies. First, most research in this field has only described the adjacent spatial relations between the anchor point and offending locations. However, in reality, suspects could display complex transition patterns among different categories of places that are wildly distributed in space [
10]. For example, a suspect may commit crimes between two places (e.g., residential communities) that are far away from each other and carry out other social activities (e.g., entertainment, shopping) in different venues (e.g., Internet bars, stores) at short distances. Existing CGP models have focused on limited types of locations (crime location and address) that lie within a narrow hunting area, resulting in the inability to comprehensively characterize the diverse movement patterns of offenders [
3], and they are therefore not practical for the location prediction of suspects who have complicated commuting or itinerant paths.
Second, existing CGP models have seldom considered the problem of mobility data sparsity, which seriously degrades location prediction performance [
11]. Suspect mobility data captured by a limited number of monitoring sensors (e.g., hotel registration system, port registration system), are typically not only sparse but also distributed unevenly spatiotemporally. Therefore, the mobility data can merely reflect part of suspects’ social lives. For example, if a suspect takes the subway and goes into a cybercafé without any other behaviors (such as hotel registration, cellphone use or ATM use, etc.) being observed, the mobility data for him that day simply contains three points, and the majority of his social movements are unknown. However, the movement modes are difficult to discover from the sparse geo-data of criminals [
12]. Some studies have also demonstrated that data sparsity undermines the accuracy of geographic profiling [
13]. Even some state-of-the-art approaches are far below the theoretical estimation because of the data sparsity problem [
14]. In the domain of LBSN (Location-based Social Networks), researchers address this issue by utilizing the trajectory data of all or relevant users to create “synthesized” trajectories or integrating heterogeneous mobility data sources (e.g., check-in data, bus and taxi trajectories data) to boost prediction performances. However, it is impractical to synthesize trajectory data of all suspects since suspects might have different mobility patterns from the public. Moreover, there is no other type of mobility data or relationship data regarding suspects that can be analyzed.
To address the above challenges, this paper proposes a novel model called CMoB (Crime Multi-order Bayes model), aiming to explore the social environment and mobility patterns of suspects for the task of individual location prediction. That is, two underlying signals inferred from suspects’ mobility data that reveal the socio-economic activities of suspects need to be taken into account:
Spatial semantics. As we know, a suspect’s mobility data imply his preferences regarding social environments in different regions. This paper terms the factors of such a social environment in a region as
spatial semantics, described by POI categories, population and crime intensities, etc. [
15,
16]. For example, a region containing a number of bars has a high probability of being a high crime risk area. Suspects who share similar social activity characteristics can be obtained by calculating the similarities of spatial semantics between regions where they have stayed. Thus, the robustness of the prediction model is enhanced by synthesizing the mobility data of similar suspects. Alternately, as offenders tend to commit crimes at places that are near or similar to their own daily living areas with familiar geographical environments [
17,
18,
19], we believe that the two nearby regions with similar social environments will cause a high transition probability between them for suspects. Thus, the transition probabilities for the unobserved locations (locations not recorded in the dataset) can be estimated based on the spatial proximities and the spatial semantics similarities to further mitigate the data sparsity problem.
Temporal semantics. As social persons, suspects arrive at and leave regions usually according to certain time rhythms, whether for ordinary or illegal activities. This paper terms such time rhythms that reflect the social routine as temporal semantics, in terms of day hours and weekday, etc. For example, some suspects like to visit cybercafé at midnight, and others perform the same behaviors at noon. Though they tend to stay at the same POI categories, the difference of temporal activities patterns between them in fact presents their divergences in social backgrounds, statuses, habits or interests. Therefore, in our study, two suspects are considered more strongly associated with the mobility patterns in the similar spatial and temporal semantic spaces [
18] rather than only share the similar spatial semantics.
In summary, the contributions of this paper are defined by the following aspects:
- (1)
A Bayes probability model that is able to uncover the moving preferences among a large numbers of locations instead of being confined to describe the relations of the address and crime locations is proposed to represent the complex location transition patterns for the individual suspect.
- (2)
A ranking algorithm is developed to measure the similarities of social movement preferences between suspects relying on the spatiotemporal semantics to fuse the mobility data of similar suspects together to cope with the data sparsity problem.
- (3)
The availability and robustness of the proposed model are enhanced by exploring KDE smoothing techniques on both spatial semantics and spatial proximity so that the transition frequencies between unobserved locations and other locations can be obtained.
- (4)
Extensive experiments were conducted using suspect mobility data, crime events data and other urban data in Wuhan city to investigate the performance of the proposed model on metrics of top-k error, top-k precision and missing percentiles. The results validate that the proposed model significantly outperformed other baseline methods with greater robustness and effectiveness.
The remainder of this paper is organized as follows. It first surveys related work in
Section 2;
Section 3 illustrates the specific design process of the proposed CMoB model;
Section 4 makes a performance assessment for CMoB on real datasets; finally, conclusions and future work are drawn in
Section 5.
3. Methodology
This section first formalizes the location prediction problem and briefly describes the location prediction workflow. Then, the exposition for each step in the workflow is presented.
3.1. Overview
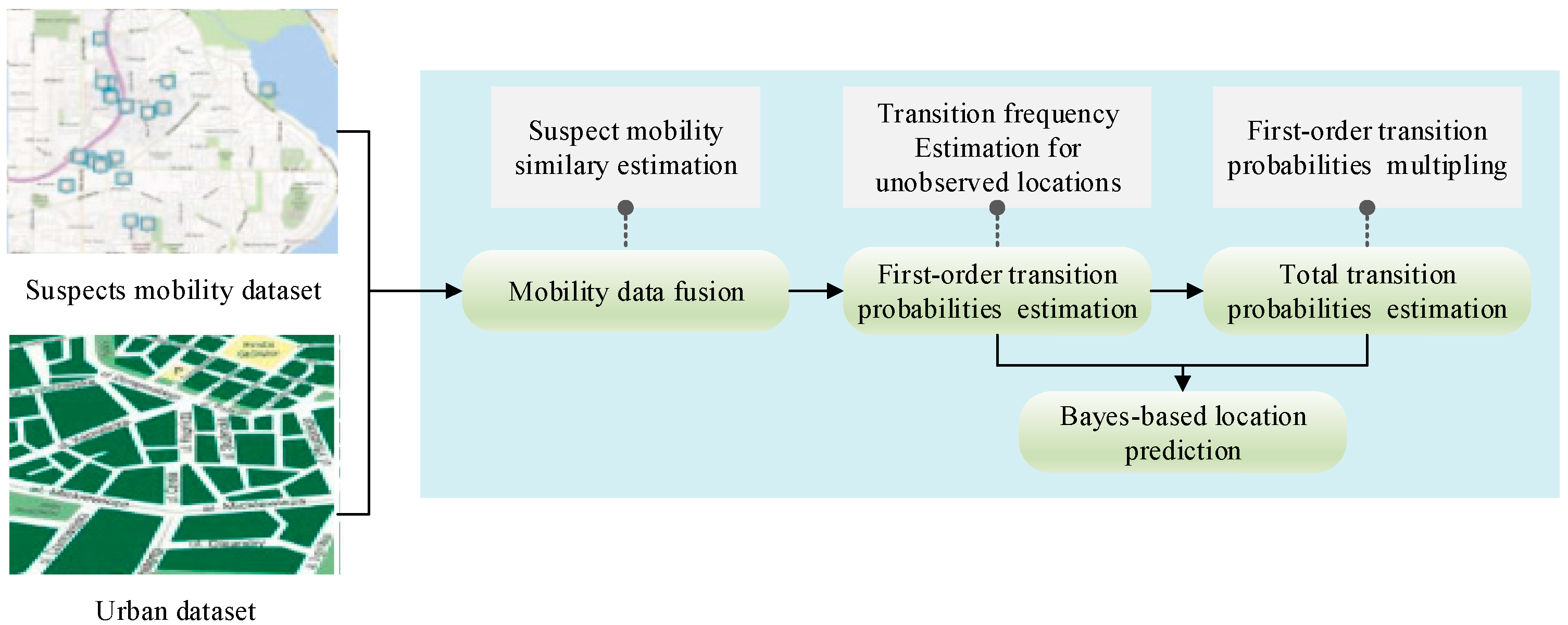
As shown in
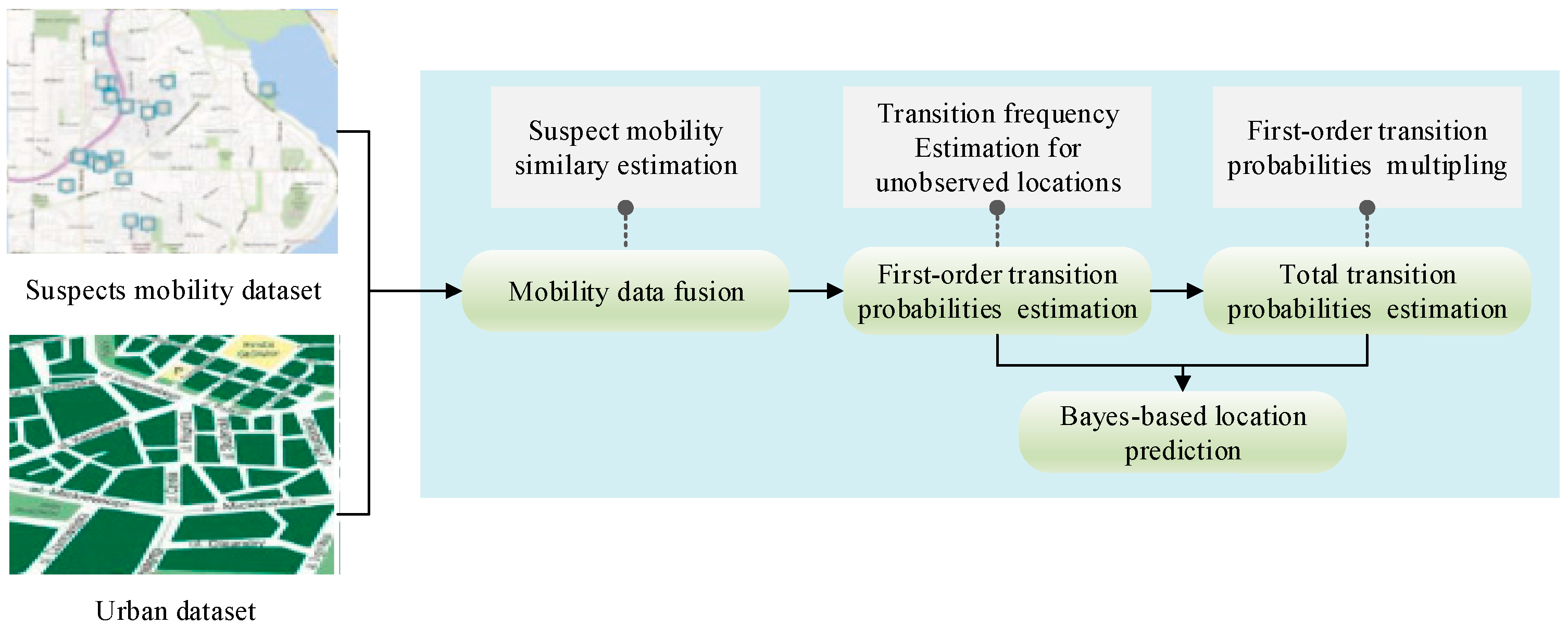
Figure 1, the prediction process consists of four major parts:
Mobility data fusing: The suspects with a similar mobility pattern to the target suspect are selected. Then, their mobility data are collected as the one of the target suspects.
First-order location transition probabilities estimation: This stage focuses on the transition frequencies estimation for unobserved locations according to the target suspect’s fused mobility data. After that, the transition probabilities in each pair of locations are calculated.
Total location transition probabilities estimation: The total transition probabilities, which are used to model the transition pattern of all possible paths in each pair of locations [
34], is indispensable for the multi-step location prediction. The total transition probabilities are obtained by multiplying first-order location transition probabilities.
Bayes-based location prediction: By integrating the first-order location transition probabilities and total location transition probabilities into a Bayes formula, the multi-step location prediction for the target suspect is realized.
3.2. Formal Statement of Problem
Our study aims to predict destinations for the individual suspect using historical trajectories from the suspect’s mobility data. This location prediction problem can be formally expressed as:
Given:
(1) Location set: G = {g1, g2,…,g|G|}, gi denotes a location (region);
(2) Query trajectory: Tp = {n1 = gk+1, n2 = gk+2,…, nj-1 = gk+t}, ni denotes a trajectory point, ;
Solve: Obtaining the probability of the next point
nj of
Tp being
gd:
3.3. Basic Concepts and Definitions
Definition 1 (Trajectory location). The observed location that one or more than one mobility points fall in.
Definition 2 (Peripheral location). The unobserved location near a trajectory location without any mobility point falling in.
Definition 3 (Semantic Vector). The semantic vector is: sr = <sr1, sr2, …>, where sri is the ith social environment feature of the location r, including crime rate, population, house density, occupation, road density and POI categories, etc.
Definition 4 (Density function).
Given a d-dimension space Fd, points px and py ∈ Fd, the density function that represent the influence of py to px can be determined by the product of the attribute value cy in py and the kernel function :
where
B represents the kernel function type.
Definition 5 (Density attracting set and Density attracting point). Given the spatial distance function , pi and px ∈ Fd, if {pi| pi ∈ D, d(px,pi) ≤ ε}, we call D the density attracting set of px and call pi the density attracting point that is attracted by px.
Definition 6 (Density value).
Given px∈ Fd, the density attracting set D = {p1, p2, …, pN} ∈ Fd of px, the density value of px is the average of the aggregating density function values of all the density attracting points in D:
Definition 7 (Transition). Given px and py∈ Fd, px is the start point and py is the end point, we denote the movement from px to py as a transition.
3.4. Suspects Mobility Data Fusion
This part aims to estimate the movement similarities between suspects, thereby enabling the model to overcome the data sparsity problem and represent a rich social movement characteristic for the target suspect, by exploring the trajectory data of similar suspects. Two essential steps are:
- (1)
Mobility Points Clustering: To make movement patterns of different suspects comparable according to the sparse individual mobility data, we cluster the mobility points of the entire dataset into multiple regions based on spatial semantics similarity and spatial proximity.
- (2)
Top-n Similar Suspects: The similarity scores between suspects are measured by overlaps among the spatiotemporal distributions of the regions created in step (1). Therefore, we can easily find the top-n similar suspects of the target suspect by ranking the similarity scores.
The spatial semantics similarity used in step (1) is able to convey social behavior similarity between suspects. Moreover, this rank method gains the advantage of a self-adaption spatial scale for movement similarity calculation.
3.4.1. Mobility Points Clustering
The spatial semantic distance between two trajectory points
i and
j can be represented by the Cosine applied on their semantic vector
si and
sj:
The unified distance
between
i and
j is determined by
where
is the spatial distance between
i and
j.
δ controls the maximum distance that, if
δ, the points
i and
j will never be clustered together.
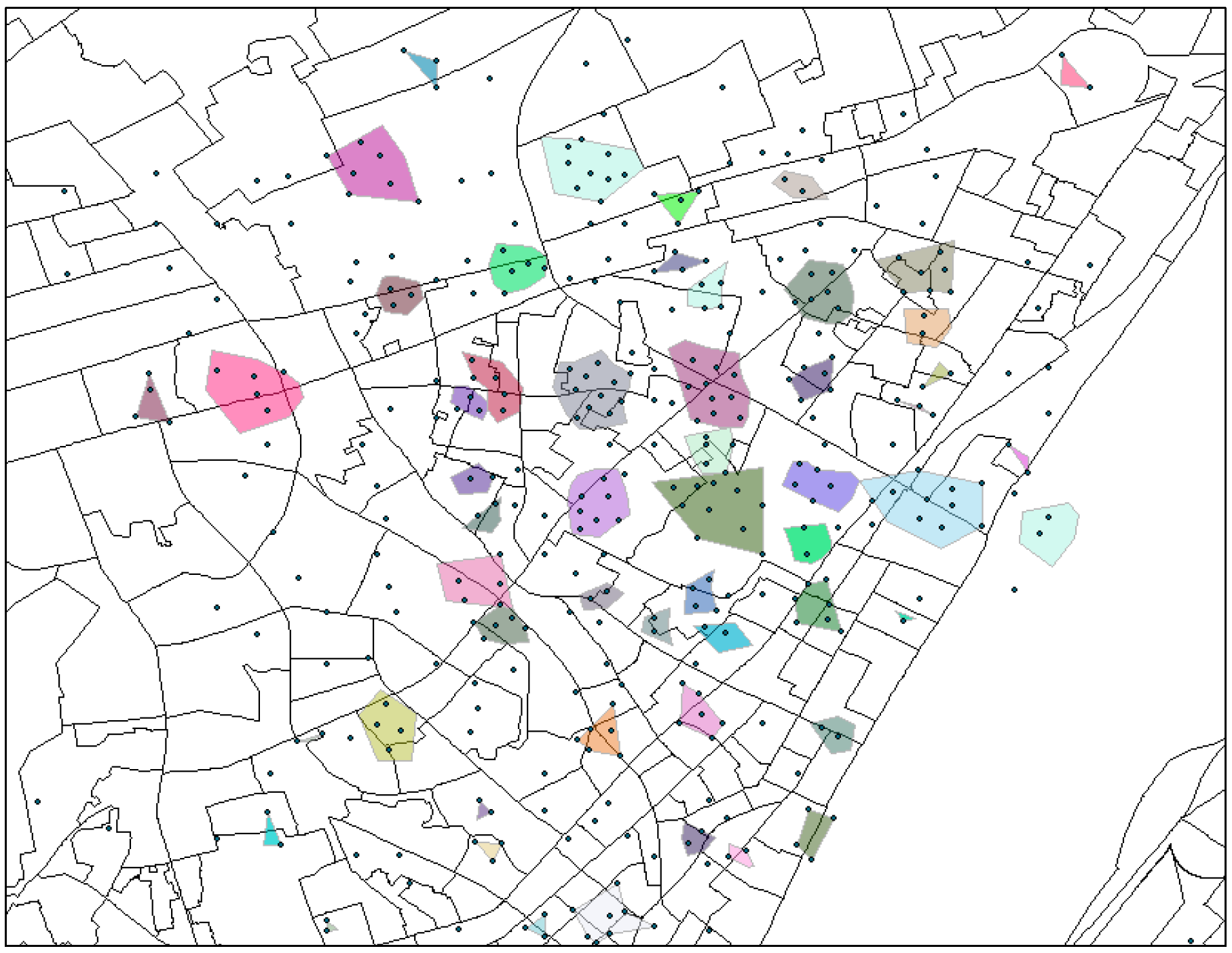
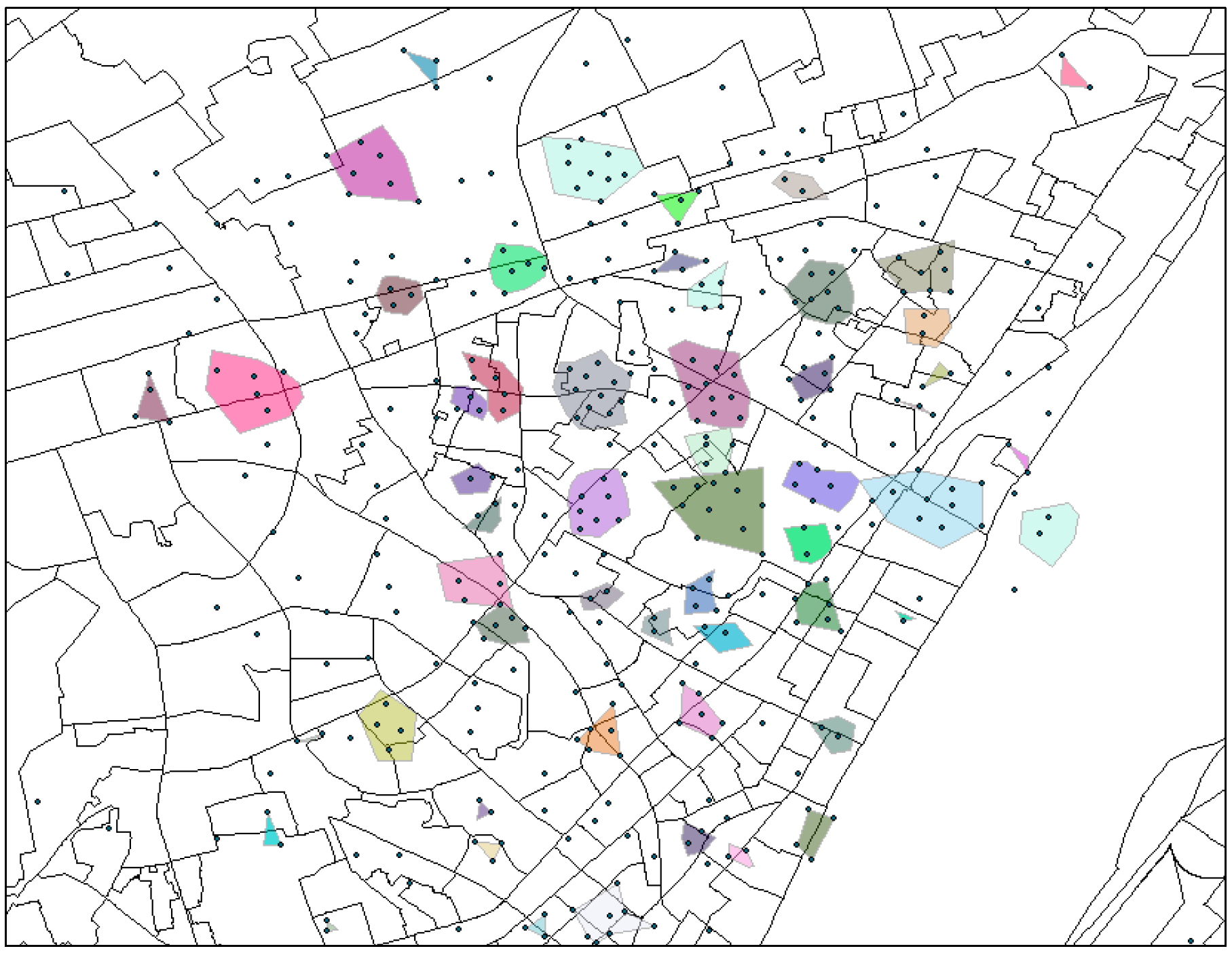
With Formula (5), all of the trajectory points are clustered into different regions using the DBSCAN [
55] clustering algorithm.
Figure 2 exhibits the regions in a local area, where each colored cluster and/or overlapping points (seen as a single point) denote a region.
3.4.2. Top-n Similar Suspects
The similarity between a pair of suspects is calculated by their temporal visiting distribution of all regions in terms semantic times. Temporal semantics are designed according to the social routine and are classify as the following three-fold.
- (1)
Hour bins of day, HBOD ∈ {< 0–6>, < 7–12>, <12–19>, < 20–24>}, denoting before-dawn, morning, afternoon and night, respectively.
- (2)
Day of week, DOW = {1 ,..., 7}, representing Monday to Sunday, respectively.
- (3)
Rest of Day, ROD = {0, 1}, where 0 express the current day is a rest day, and 1 is a working day.
Intuitively, if location
b is visited many times by suspect
u, then
b must be important for suspect
u. Furthermore, a location
b that is visited rarely by others will be more representative for suspect
u than other common locations. Thus, combining these two ideas, we design the
region visiting vector by visiting intensity as follows.
where
qt,u,s is the visiting intensity of region
s for suspect
u in a semantic time
t as,
where
bt,u is the total visiting number of all the regions at semantic time
t for suspect
u,
bt,u,s stands for the visiting number of region
s at semantic time
t for suspect
u, and I
t{
s} represents the number of suspects that visit the region
s at semantic time
t.
Relying on
, the region visiting multinomial distribution of semantic time
t for suspect
u is defined as:
Then, we use the
Jensen-Shannon formula to convey the diversity of the region visiting multinomial distribution between suspects
u and
v.
where
KL(.) denotes Kullback-Leibler Divergence.
The similarity score between suspects
u and
v can be defined according to the diversities in all of semantic time
T:
Consequently, by Formula (10), we are able to choose the top-n most similar suspects for the target suspect.
3.5. First-Order Transition Probabilities Estimation
Fusing the trajectory data of similar suspects is an applicable way to alleviate the data sparsity problem. However, these trajectory data are usually insufficient since the visiting information among a number of unobserved locations is unknown. As a consequence, the prediction model will fail to unveil comprehensive mobility patterns among more locations, cause the model to suffer from the overfitting problem [
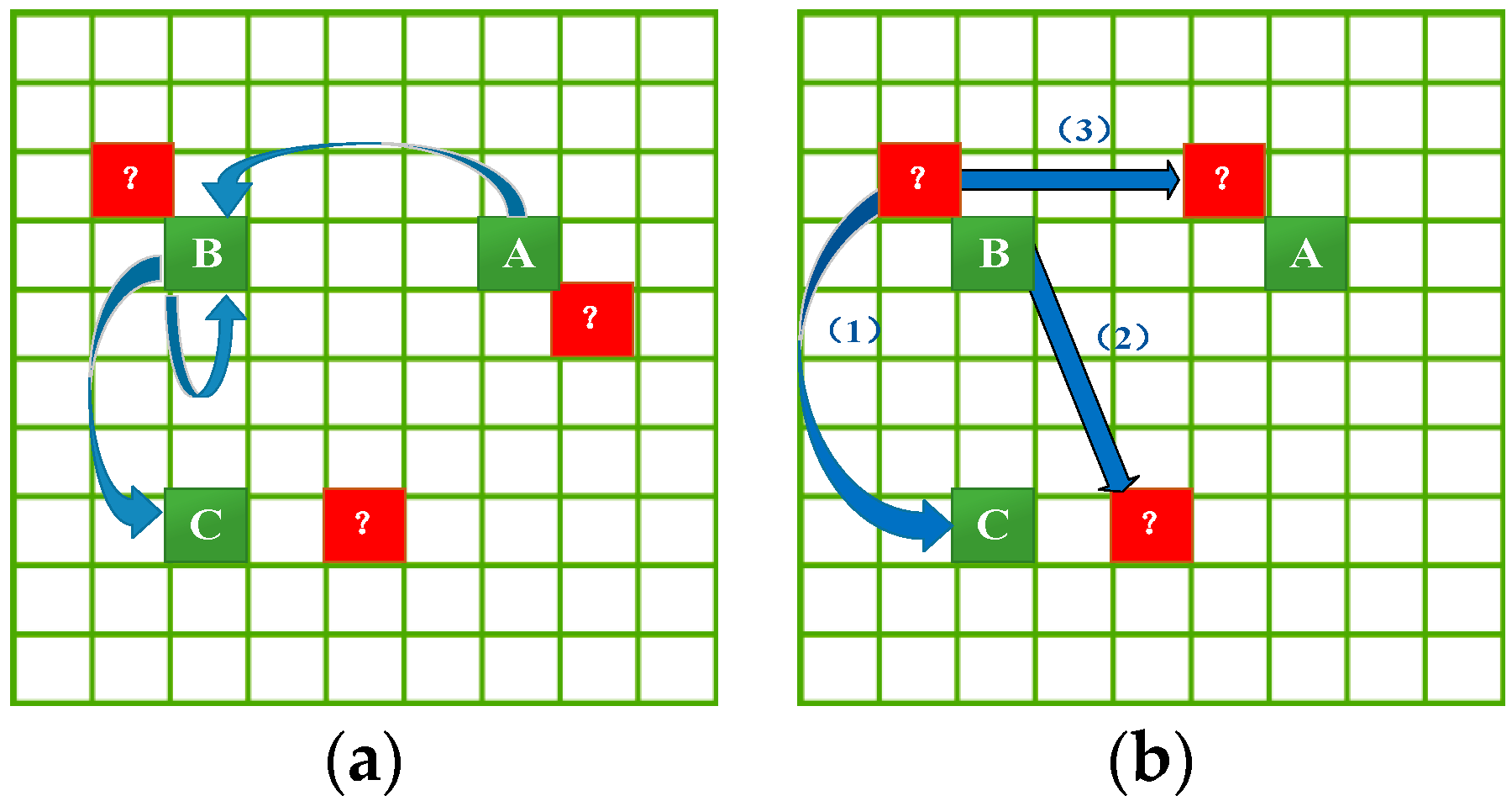
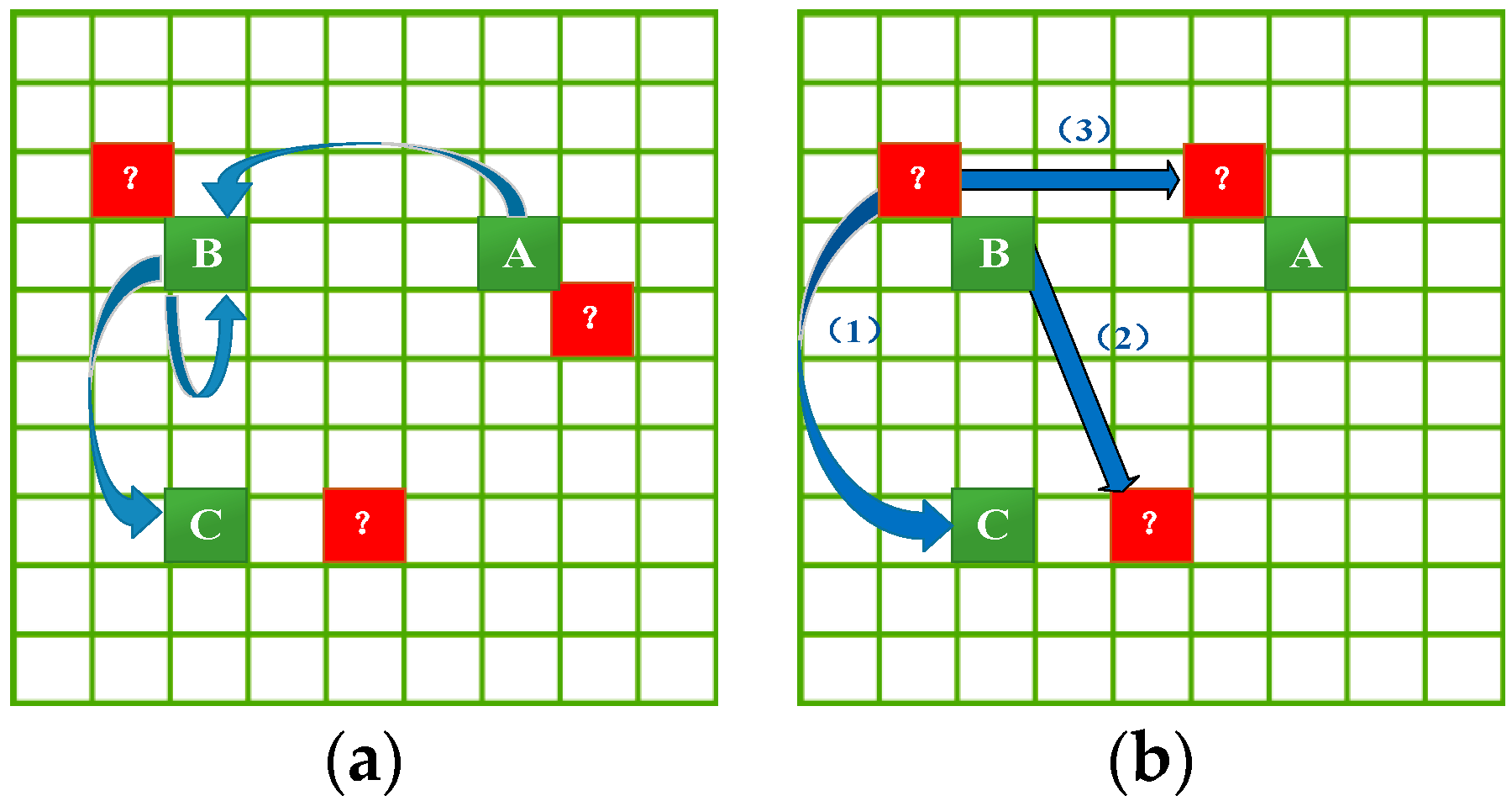
53], and further make it incapable of meeting the prediction requirement when the query trajectory contains the unobserved locations. For example, as shown in
Figure 3a, given that we already know the transition frequencies (blue arrows) among trajectory locations A, B and C (green grids), we can make a prediction for the query trajectory consisting of any of them. However, we are unable to make a prediction for any query trajectory consisting of the unobserved (peripheral) location (red grids with “?”) because there is no transition information for these locations in the mobility dataset.
Therefore, to improve the generalization capability of the prediction model, this section will estimate the transition frequencies in three instances as shown in
Figure 3b: (1) transition frequencies from peripheral locations to trajectory locations; (2) transition frequencies from trajectory locations to peripheral locations; and (3) transition frequencies from peripheral locations to peripheral locations. These transition frequency estimations follow the principles below.
- (1)
A significant characteristic of human activity is that the transition probability from one location to another one is inversely proportional to the distance between them [
46]. Therefore, we can exploit such a geographical characteristic to build the transition patterns for an unobserved location from its spatially adjacent observed locations.
- (2)
The similarity in social environment between locations that are nearby each other may lead to similar crime spatial activity patterns and transition patterns for them [
56,
57]. Thus, it can be leveraged such spatial semantic similarity to help us estimate the transition probabilities for unobserved locations.
The challenge is how to quantify and utilize the influences of both spatial adjacency and spatial semantics to estimate the transition frequencies for peripheral locations. This research addressed the challenge via a KDE-based smoothing technique. To the best of our knowledge, this is the first attempt to infer the transition patterns for unobserved locations by jointly exploring geographical influence and spatial semantics. In the following, we elaborate this procedure.
3.5.1. Transition Frequencies from Trajectory Location to Peripheral Location
We assume that
px is the peripheral location, that the trajectory location
p0 is the starting point of
N transitions
Ʈ = {
}, and that
D = {
p1,
p2,
…, pN } is the
density attracting set of
px. The trajectory locations
p1,
p2,
…, pN are the end points of transitions in
Ʈ. Given the transition frequency
from
p0 to every
pi ∈ D, the transition frequency from
p0 to
px can be obtained by aggregating
and dividing it by
N according to Formula (3) when only considering the spatial proximity:
where
gauss means that we use a Gaussian kernel function,
d(px,pi) indicates the spatial distance between
px and
py, and
hd is the bandwidth for spatial distance in the kernel function.
If we only consider the spatial semantics closeness, the above Formula (11) transforms to:
where
hs is the bandwidth for spatial semantics closeness in the kernel function.
When both spatial distance and semantics closeness are considered simultaneously, we will obtain the unified transition frequency by combining Formulas (11) and (12)):
where
a1 is a weight controlling the influences of spatial proximity and spatial semantics on the transition frequency.
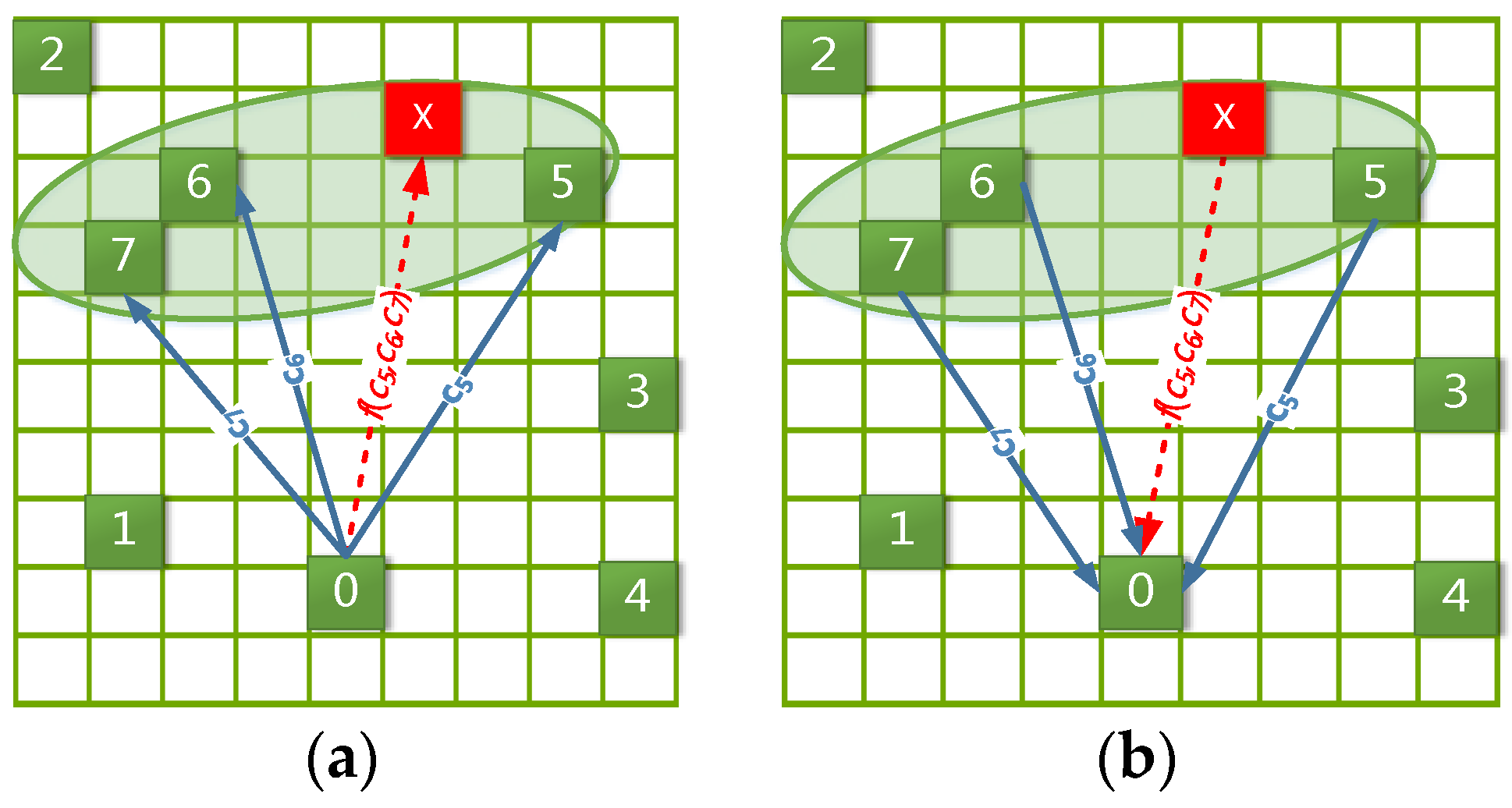
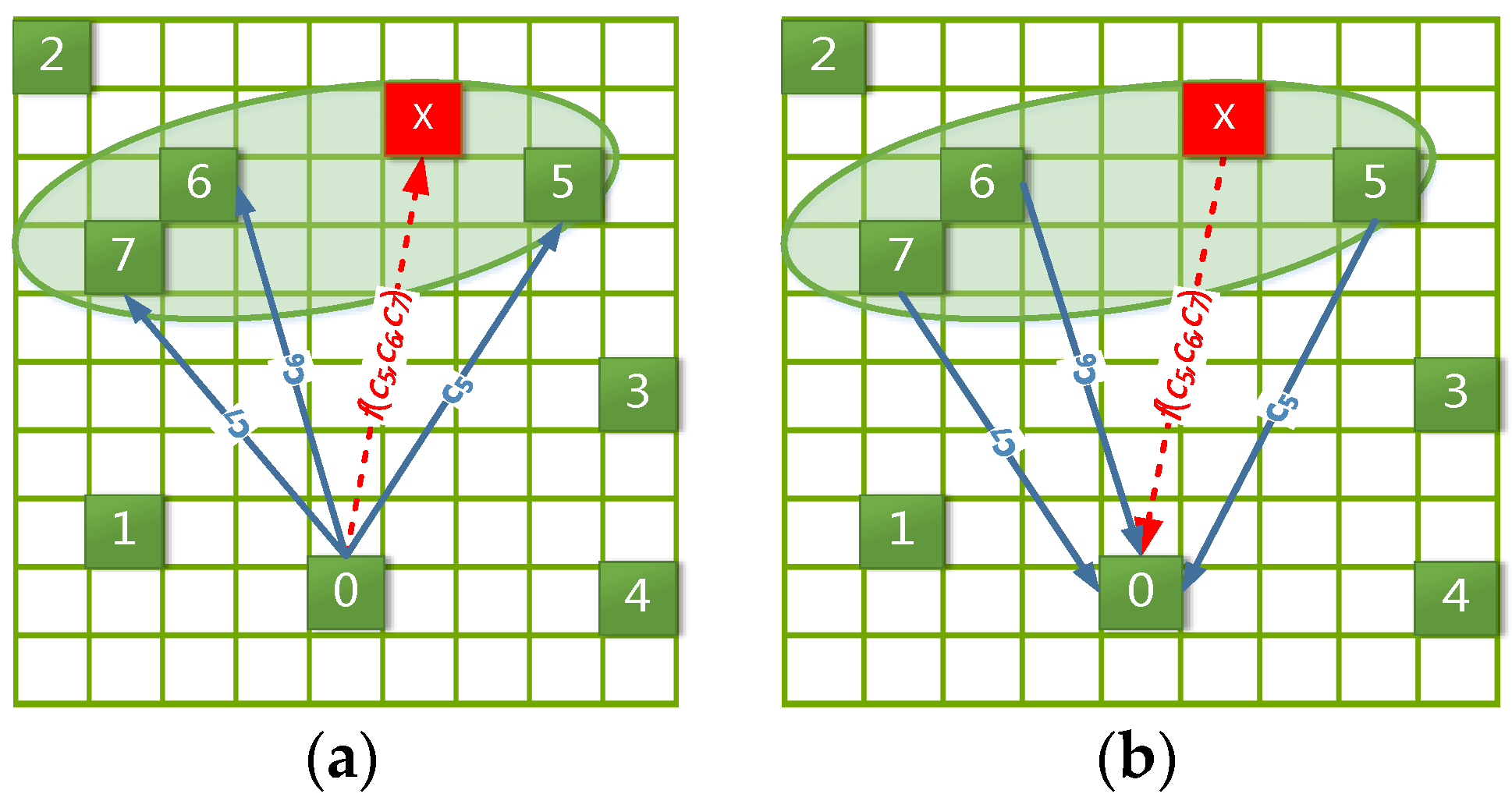
For example, as shown in
Figure 4a,
px is a peripheral location (red grid), and its
density attracting set D is composed of the trajectory locations
p5,
p6 and
p7 (green grids located in the green eclipse). Meanwhile,
c5,
c6 and
c7 (blue arrows) denote the known transition frequencies from
p0 to
p5,
p6 and
p7, respectively. Then, we can estimate the unknown transition frequency (red dotted arrow) from
p0 to
px by importing
c5,
c6 and
c7 into Formulas (11)–(13).
3.5.2. Transition Frequencies from Peripheral Location to Trajectory Location
By the same process mentioned above, we are able to estimate the transition frequency from a peripheral location to a trajectory location. Formally, assume that the trajectory location
p0 is the end point of
N transitions
Ʈ = {
},
D = {
p1, p2, …, pN } is the density attracting set of the peripheral location
px, and the trajectory locations in
D are the starting points of the transitions in
Ʈ. Given the transition frequency
from
pi ∈ D to
p0 in each transition of
Ʈ, the transition frequencies from
px to
p0 can be obtained by Formulas (11) and (12) as
and
, respectively. Therefore, the final transition frequencies from
px to
p0 are
where
a2 is a weight.
The corresponding example plot is shown in
Figure 4b with almost the same processing as in
Figure 4a. Its description is omitted to avoid repetition.
3.5.3. Transition Frequencies from Peripheral Location to Peripheral Location
We learn of the transition frequency from peripheral location
px to another peripheral location
py through two aspects: (1) deeming
py as the trajectory location as in
Section 3.5.2 and (2) regarding
px as the trajectory location as in
Section 3.5.3. Then, we combined the two estimated visiting frequencies, denoted as
cxy and
cyx, respectively, to produce the final result
:
where
a3 is a weight.
It should be noted that only by estimating all the transition frequencies between peripheral locations and trajectory locations can we obtain the transition frequencies between peripheral locations.
3.5.4. Markov Location Transition Matrix
Thus far, we are able to compute the first-order transition probabilities, which are utilized to build the Markov transition matrix
M:
where
G denotes all of the locations.
3.6. Total Transition Probability Estimation
Next, we need to calculate the total transition probability
pi→j that expresses the transition probability between a pair of locations through all possible paths, each of which is made up of a number of bypass locations. Luckily, this total transition probability can be generated from
M by multiplying itself. In general,
M1+r (
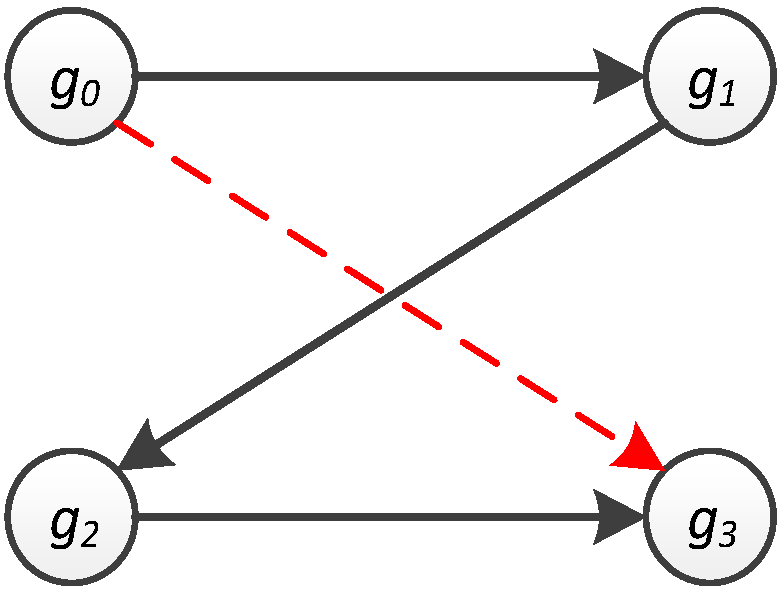
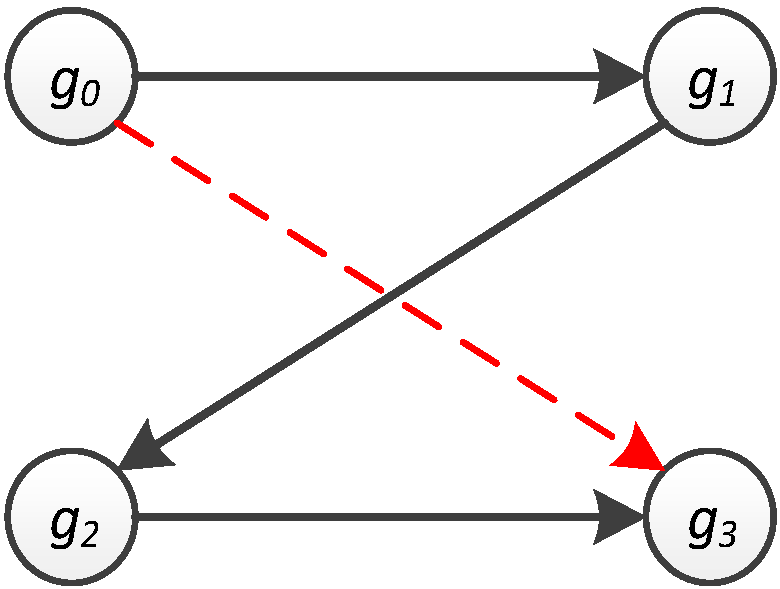
r ∈ [0, ∞)) holds the probabilities of transition from one location to another one in exactly r steps (bypass locations). The following example demonstrates the concept of the total transition probability. By referring to
Figure 5 and
Figure 6a, the probability of travelling from
g0 to
g3 is found to be zero (
= 0) because
M only stores the probability of movement from one location to another through exactly zero steps (bypass locations). Nevertheless, when
M is multiplied by itself 2 times to form
M3, each entry in it indicates the transition probability from one location to another in two steps. Hence, the transition probability from
g0 to
g3 through 2 steps is 0.729 (
), as shown in
Figure 6c.
According to the multi-step products of
M, we can obtain the total transition probability
pi→j by the sum of
r-step transition probabilities of all possible paths between
pi and
pj. Formally [
34]:
However, two problems also arise:
- (1)
The paths with different numbers of steps do not necessarily have the same influences on the total transition probability. For instance, the pair of locations with short spatial distance prefers a small number of steps rather than many bypass locations. Therefore, how are we to capture various influences of different Mr on the total transition probability?
- (2)
How do we define the maximum value of r since the number of paths from one location to another is infinitely large without restrictions?
For the first question, people including suspects usually travel in a short path to make the cost (e.g., time, expense or energy) as small as possible even though a detour distance may be taken sometimes. Therefore, the shortest path generally makes the greatest contribution to the total transition probability, and the path with more bypass locations makes a lesser contribution to the total transition probability. Thus, we can give different weights to different
r-step transition probabilities and sum them up as the total transition probability
, formally,
where
dij is the spatial distance between locations
i and
j. When
dij is fixed, a large
r will cause a small
wr, reflecting the fact that a path with too many bypass locations is seldom chosen by suspects.
For the second question, the existing study of [
34] gives the answer that the maximum step
rmax is usually 1.2 times the shortest steps between the start and end locations. However, this idea only fits specific trajectory datasets. Furthermore, it may yield an irrelevant
rmax when focusing on a different individual suspect. It is suggested that
rmax should account for the shortest steps of the target suspect as well as the spatial distance between the two locations. The procedure to compute the
rmax for an individual suspect is shown as below.
- (1)
Give a constant value q > 1, assuming it equals to 2.
- (2)
Build a transition weight matrix H. If there is no transition between locations gi and gj, the entry Hij = ∞; if the target suspect is involved in this transition, Hij = 1; else, Hij = q.
- (3)
Obtain the top-
k shortest paths [
56] based on
H in which the entries are considered to be the distances among locations;
- (4)
Computer the conformity tm for every path m in the top-k shortest paths by
where
a4 is a fixed coefficient larger than zero,
lm denotes the distance of path
m,
rm denotes the number of bypass locations in path
m, and
em denotes the number of locations visited by the target suspect in path
m. Therefore, a path with more locations that the target suspect has visited and fewer bypass locations has more power to describe the
r that the target suspect prefers.
The number of bypass locations rmax in the path with the largest conformity tmax is what we need.
Once
wr and
rmax are obtained, we can efficiently compute the total transition probability matrix for all pairs of locations by a dynamic programming method [
34].
3.7. Bayes-Based Location Prediction
The probability of a location
being the destination can be computed as the probability that
nj contains the destination location
conditioning on the query trajectory
Tp. This probability was previously given in Formula (1) and is extended using Bayer’s inference here as:
The prior probability
is easily obtained through
where
is the visiting times of
and
is the visiting times of all locations.
The posterior probability
is calculated as [
34],
where P(
Tp) is the path probability of the query trajectory
Tp;
p(j-1)→j is the total transition probability of moving from
n(j-1), the end location of
Tp, to the predicted destination
nj = ; and
p1→j is the total transition probability of travelling from
n1, the starting location of
Tp, to
nj = .
The path probability P(
Tp) can be obtained by:
where
pk(k+1) is the first-order transition probability between locations
nk and
n(k+1).
Now, the first-order transition probabilities coming from Formula (16) and the total transition probabilities coming from Formula (17) can be inserted into Formulas (23) and (22), respectively, to fulfill the location prediction task. The complete location prediction algorithm is shown in Algorithm 1.
| Algorithm 1. Location Prediction Algorithm. |
| Input: query trajectory Tp = {n1,…,n(j−1)} |
| Output: top-k predicted locations. |
| 1 list = ∅; |
| 2 construct path probability P(Tp) from M; |
| 3 Foreach nj in G do |
| 4 Retrieve p1→j and p(j-1)→j from Mr; |
| 5 Compute ; |
| 6 Compute P(Tp | nj = ); |
| 7 Compute P(nj = | Tp); |
| 8 Store P(nj = | Tp) in list; |
| 9 sort list; |
| 10 return: top-k elements in list. |
4. Experimental Section
In this section, we conduct an extensive experimental study to evaluate the performance of our CMoB.
4.1. Data Preparation
4.1.1. Study Area
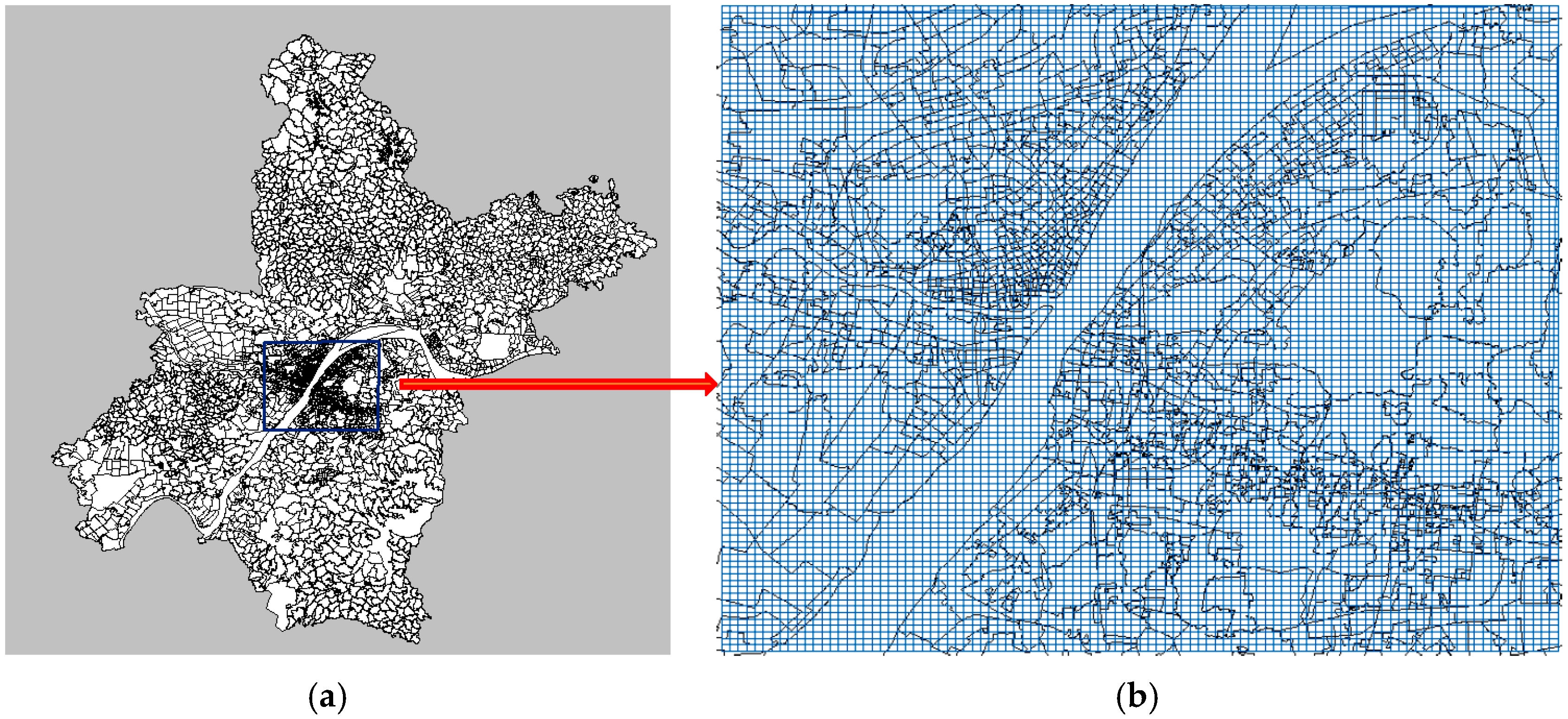
Wuhan is the capital of Hubei province and is one of the largest cities in central China. It lies in the eastern Jianghan Plain at the intersection of the middle reaches of the Yangtze and Han rivers. The city of Wuhan has a population of 10,766,200 people as of 2016, and its urban administration consists of 7 central districts (Qiaokou, Jianhan, Jiangan, Hanyang, Wuchang, Hongshan, and Qiangshan) and 6 suburban and rural districts (Dongxihu, Hannan, Caidian, Jiangxia, Huangpi and Xinzhou).
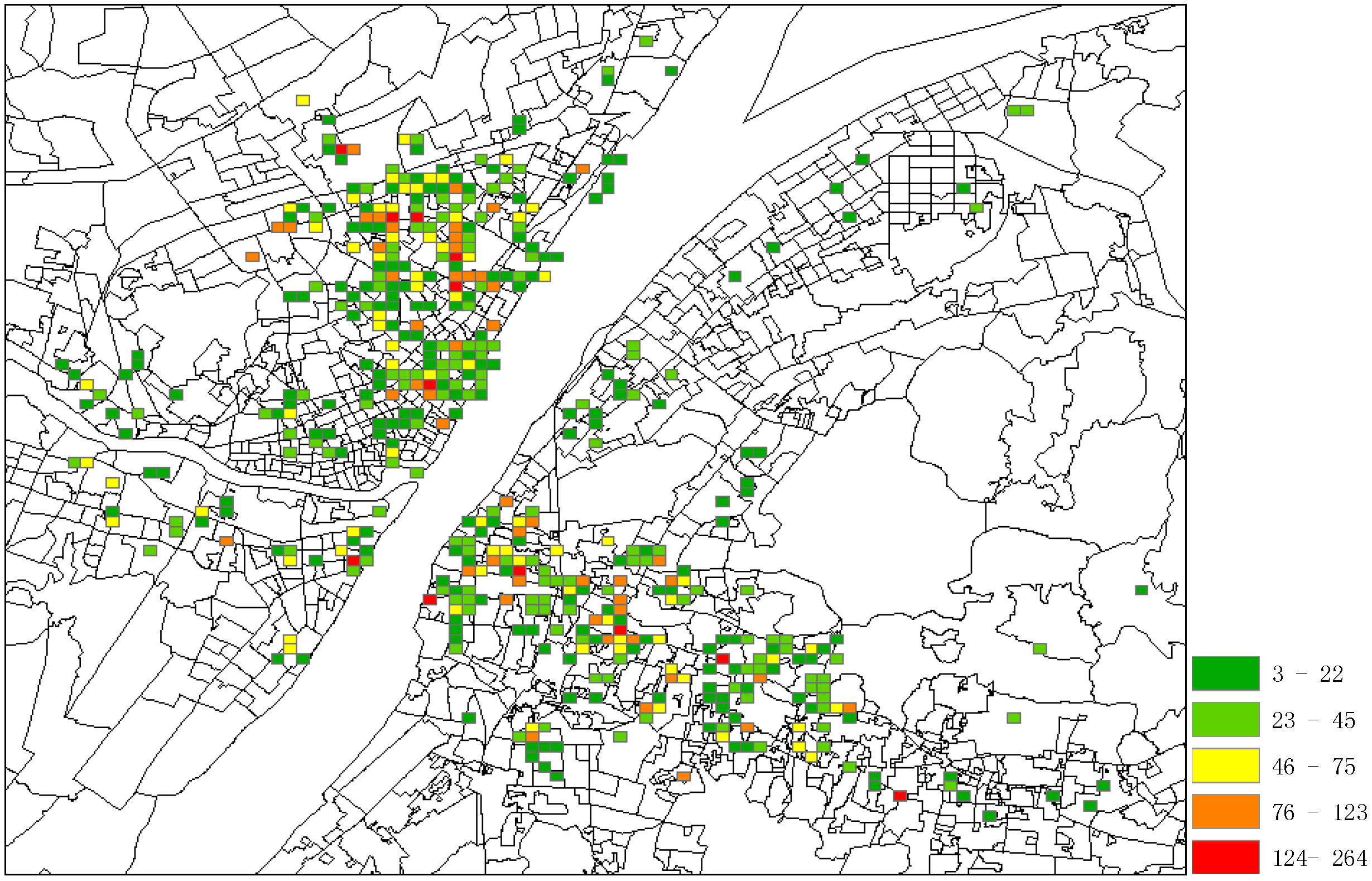
This paper built 100 × 100 grids to cover the 570-km
2 urban areas of Wuhan City as shown in
Figure 7, and each of grid (256 m × 224 m) denotes a location as the basic spatial unit.
4.1.2. Data Sources
Four types of datasets are used to test the location predictions, including a suspect mobility dataset, criminal dataset, POI dataset, and demographic dataset. The detailed information of each dataset is described below.
(1) Suspect Mobility Dataset
This dataset, which was reported to the Wuhan Police Department, includes 18,754 records of 210 suspects within 6 months (January–June 2012) in Wuhan city, distributed across 1083 different venues. A trajectory can be represented as the sequence of grids that cover the locations of a suspect recorded in the dataset according to the temporal order in one day. There are 10,537 trajectories in total. A large number of locations in the records are described as text addresses, such as "Yinxing Drifting Wood shop, No. 557 Liberty Avenue Wuhan City", “Changxin Digital Hongyuan Shop the 1st floor Ya’an Garden, science museum road” etc. Therefore, we converted these text addresses into longitudes and latitudes by Geocoding web services from Baidu [
57] and Geopy [
58]. It should be noted that the geocoding web services will randomly introduce artificial errors. However, by checking some results of geocoding services with real coordinates, we found that these artificial errors are so small that they will not lead to a venue transfer from one grid to another grid, which means that these artificial errors will not influence the effects of our model and baseline methods.
After data cleaning processing, 65 records were filtered out because their text addresses were unresolvable in geocoding web services, and together with records referring to suspects who have fewer than 10 records in dataset. At last, 179 suspects with 17,516 records (containing 1050 venues and 10,195 trajectories) are left as the final dataset. The spatial distribution of suspects is shown in
Figure 8, where the colors in grids denote the different accessing intensities by all suspects.
There are several characteristics about the final dataset:
The mobility data for each suspect is extremely sparse. For example, there are 70% of suspects with fewer than 50 records, 83% of suspects with fewer than 50 trajectories, and 80% of them with fewer than 8 different venues. It can also be inferred that each suspect was frequently detected in several limited areas.
The distances between continuous trajectory points varied from 0 km to 10 km.
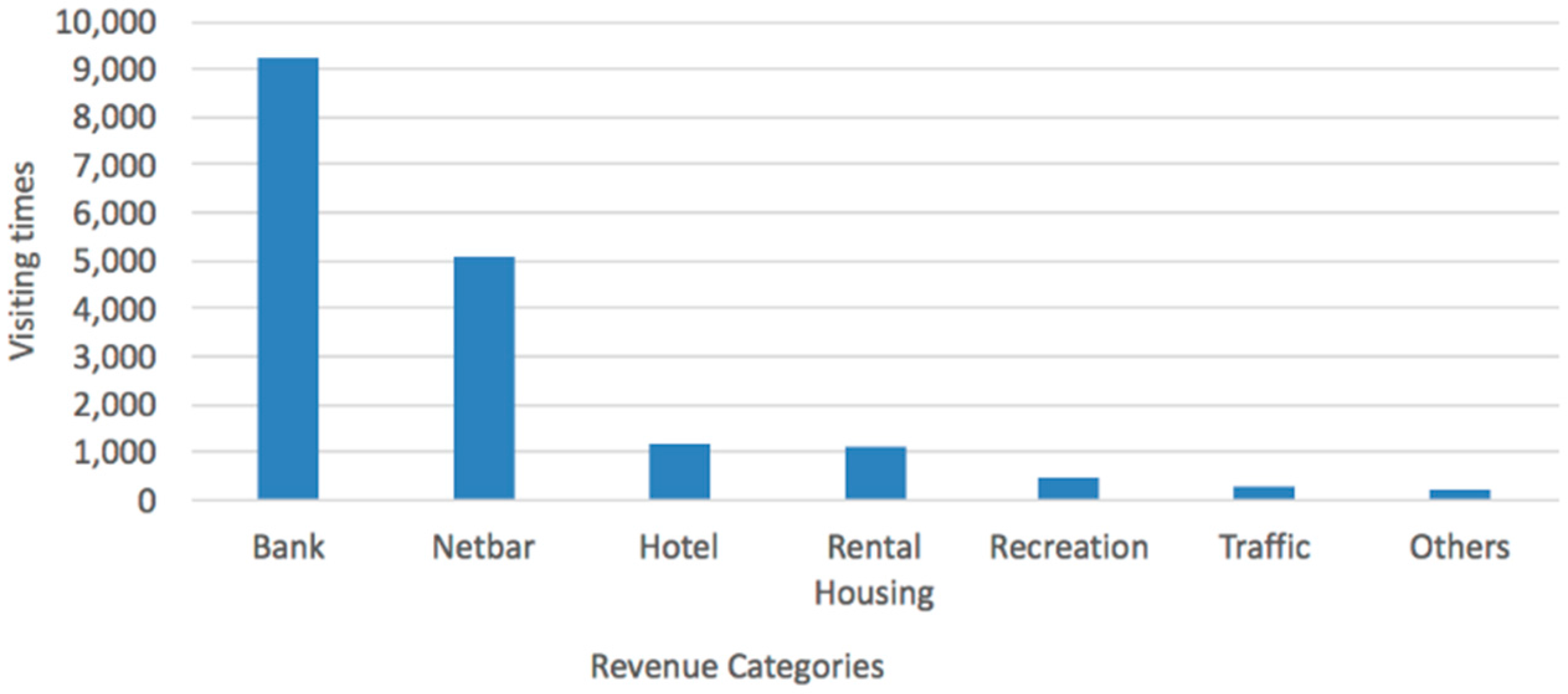
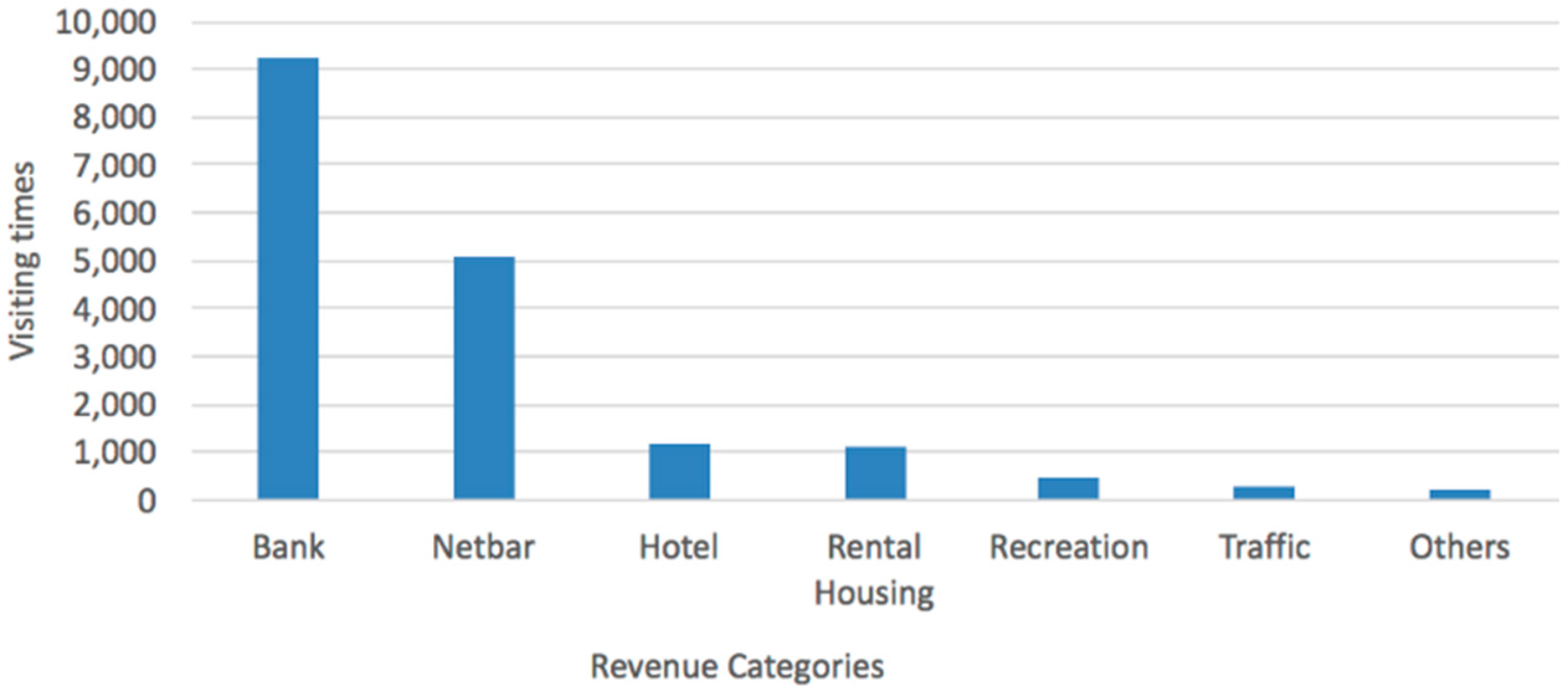
The visiting distribution of venue types is shown in
Figure 9, where the suspects accessed banks (mostly ATM machines) up to 9207 times. The second highest accessing place is cybercafés, followed by hotels, rental housing, recreation, traffic sites (airports and bus stations, etc.) and other types (such as shopping malls, etc.).
(2) Criminal Dataset: It includes 105,347 criminal incidents of Wuhan city from January–December 2012, with the offense type and coordinates for each incident.
(3) POI Dataset: This dataset consists of 102,641 POIs in 12 categories, containing restaurant, traffic station, hotel, residential community, education, entertainment, shop, government, factory, company, hospital and bank.
Demographic dataset: There are 3602 communities with demographic information for each community. The demographic information contains population, education, sex, birth date, nationality and occupation. The datasets from (2) to (4) are all obtained from the Wuhan Police Department and are utilized as the spatial semantics to find similar suspects (in
Section 3.4.1) and estimate transition frequencies for the unobserved locations (in
Section 3.5.1,
Section 3.5.2 and
Section 3.5.3).
4.2. Evaluation Metrics
We use three metrics to measure the performance of location prediction models:
- (1)
Top-
k Precision [
54] (TP): If the correct destination falls within the top-
k predicted locations, this time is considered to be the correct time. Thus, the ratio of correct times to the total times is called top-
k precision. The higher this metric value is, the better performance the model has.
- (2)
Top-
k Error (TE): The shortest distance between the top-
k predicted locations and the correct destination. If
k = 1, it is called Accuracy Measures [
27]. This metric is used to indicate how far the prediction results deviate from the true destinations. A better algorithm has a lower distance deviation.
- (3)
Missing Percentiles (MP): The percentage of occurrences for which a model cannot give any result. This metric is used to evaluate the impact of the data sparsity on the robustness of the models. A better algorithm has a lower missing percentile.
k in the metrics of (1) and (2) specifies the number of locations (grids) that have to be searched to identify the correct destination. A large k relates to more locations needing to be searched by police forces, as well as more resources needing to be consumed. Therefore, k should be adjusted according to the compromise between consumable resources and preferable metric performance in the actual application. If it is not specified, we define k = 9.
In this work, we define the distance of the two grids as the distance between their centers.
4.3. Baselines
In experiments, we randomly chose ten suspects with m similar suspects for each of them. Hence, we carried out eleven experiments to evaluate the performance for each model as m increases from 0 to 20.
As discussed in
Section 1, no related work has been proposed to the multi-order location prediction for individual suspects based on the query trajectory. However, we use the following LBSN-related methods, which are equivalent to state-of-the-art methods as baselines.
Markov: it employs the first-order location transition matrix to predict the location. Most existing location prediction methods are actually variants of the Markov model. Particularly, [
54] employed the Markov model to model the neighbor road selection probabilities for individual offenders, though the probabilities were not used to present the transition patterns between arbitrary distance locations as this paper did. The Markov model therefore represents the general class of location prediction models without dealing with the data sparsity problem.
ZMDB [
44]: This method is used for the multi-order location prediction. It first counts the number of trajectories satisfying two conditions: (i) it is partially matched by the query trajectory
Tp; (ii) it terminates at a location in
nj. The count is then divided by the number of trajectories that terminate at a location in
nj to serve as the posterior probability. Formally,
where
denotes the number of trajectories that satisfy both aforementioned conditions and
denotes the number of trajectories that terminate at a location n
j. Afterwards, Formula (24) is substituted into Formula (20), thus yielding the probability of
nj as the destination. Compared with Markov, ZMDB holds the advantage of modeling multi-order location transitions.
SubSyn [
34]: This approach realizes the multi-order location prediction by decomposing suspects’ trajectories into a Markov matrix and total transition probabilities. However, the difference between it and our approach lies in two aspects: it does not estimate the transition patterns for unobserved locations, and the number of bypass locations when computing the total transition probability is a fixed value. In addition, this model is trained using the trajectory data of all of ten suspects in each experiment to simulate the way of synthesizing the mobility data of all users in [
34].
For the proposed CMoB, the gridding-searching method [
59] is involved to search for the optimal parameters for the proposed CMoB. To illustrate the step, a numbers of parameter sets were sampled from the space in
Table 1.
Then, top-k precision was used as a criteria for selecting the optimal parameter sets, which were finally assigned as: ε = 650 m, hd = 300 m, hs = 0.1, a1 = 0.5, a2 = 0.5, a3 = 0.5 and a4 = 0.7.
For all of the models, if any of them fails to find the predicted destination, we use the last point in the query trajectory as the predicted one.
4.4. Results Evaluation of Top-k Error
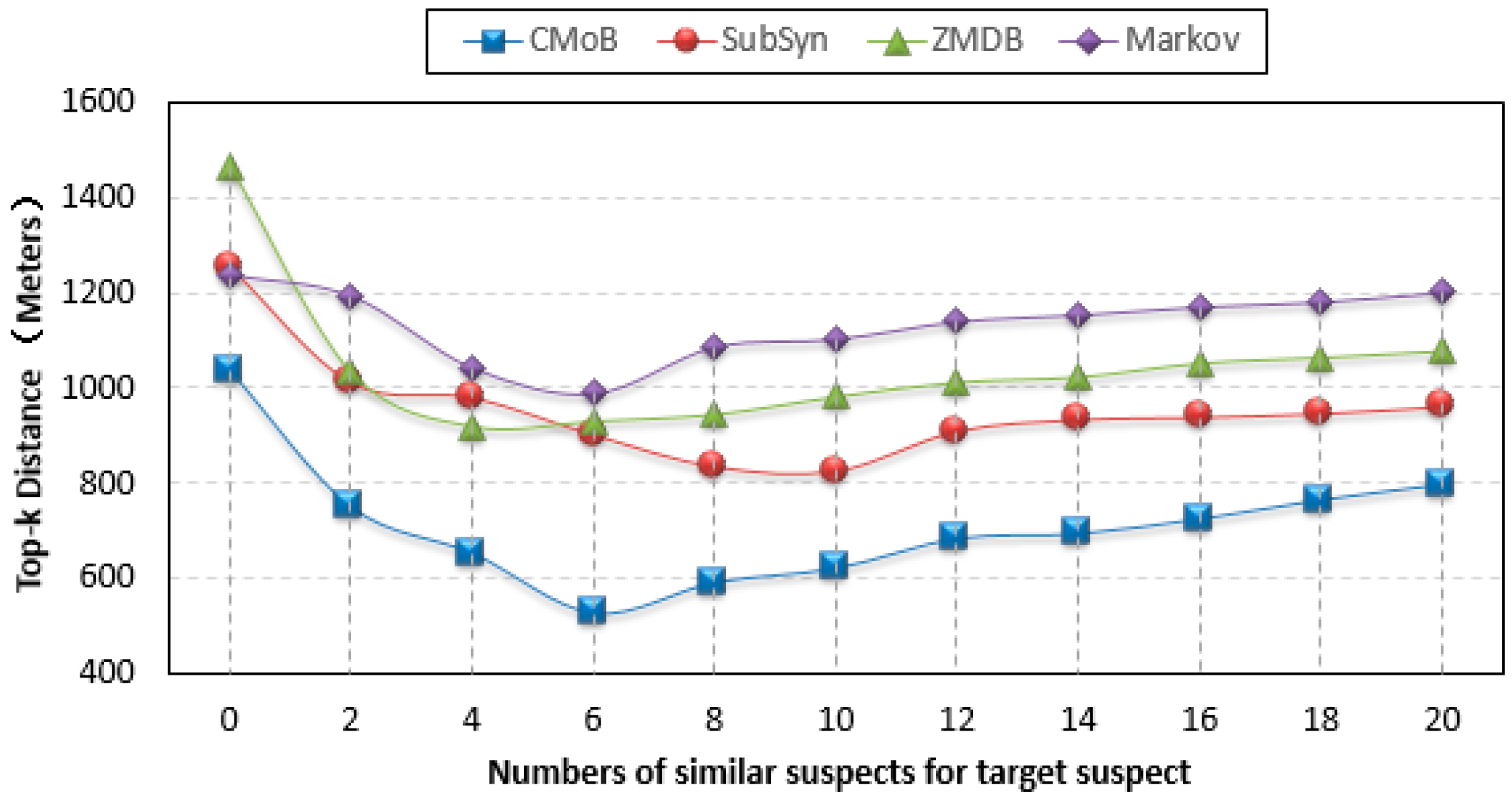
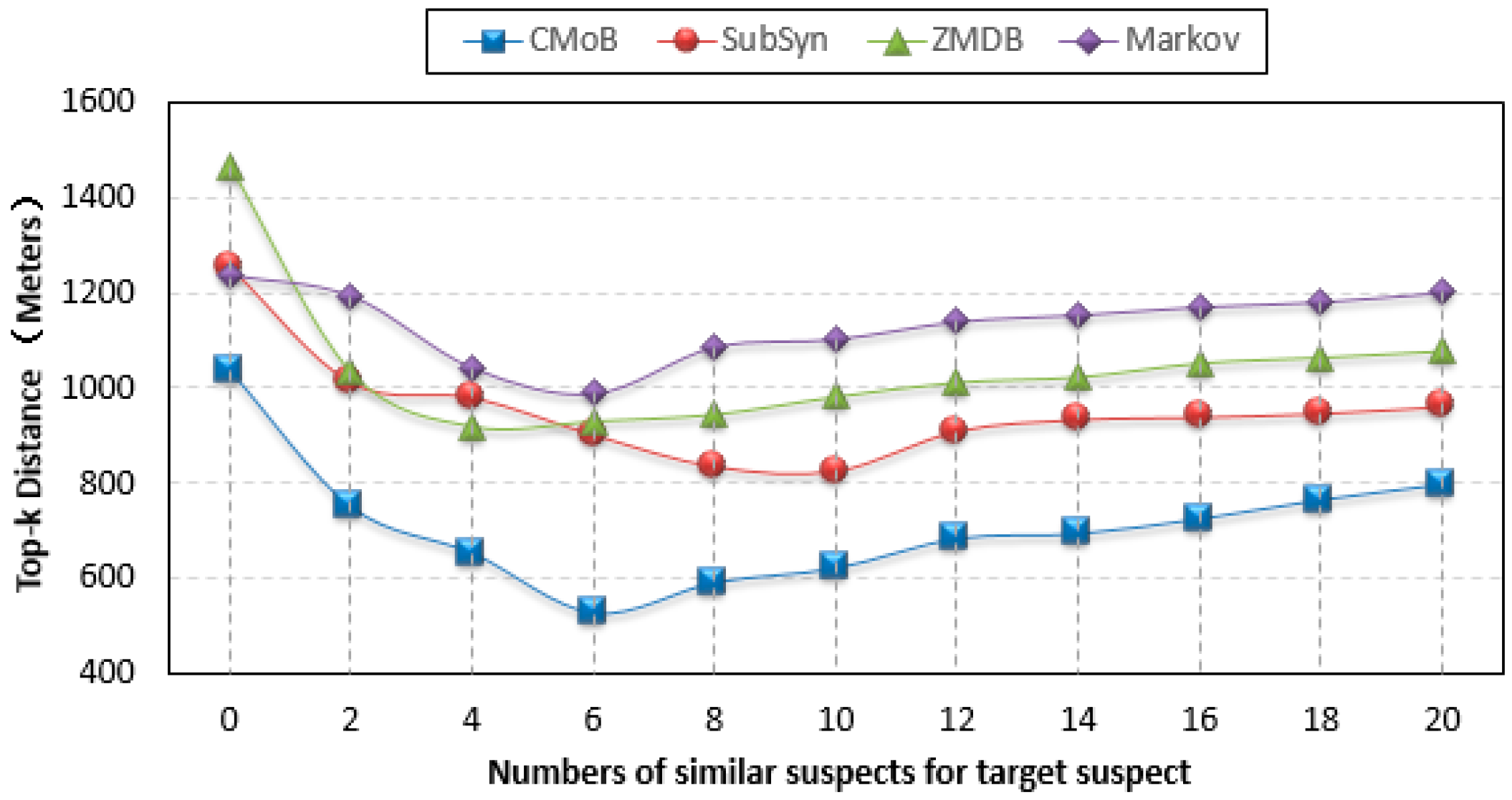
As shown from the curves in
Figure 10, the performance of our CMoB on TE (top-
k error) is outstanding among the four models. In particular, with the increase of
m, the TEs of the other three baseline methods are all higher than 800 m, while that of CMoB is below 800 m most of the time. When
m = 0, which means there is no external trajectory data to be leveraged, the TE of CMoB is lower than those of SubSyn, ZMDB and Markov by 20%, 20% and 40%, respectively, yielding a significant improvement in performance, because CMoB is capable of alleviating the data sparsity by the estimation of transition frequency for unobserved locations. As
m continues to increase, the TEs of all models decrease since more external trajectory data weaken the data sparsity problem. For instance, when
m increases from 0 to 6, the TE of CMoB keeps decreasing, and that of SubSyn keeps decreasing when
m increases from 0 to 10. The best TE of each model is also obtained during the processing, where the best TE of our proposed model is 527 m and those of the other three models stay in the 800–1000 m range, which means that the performance of our model is better than the others by approximately 80–100%. However, when the value of
m is beyond a certain threshold, the performances of all the models decline owing to the difference of mobility patterns between the target suspect and later employed similar suspects growing wider. For example, when
m > 6, the TE of CMoB and Markov start to increase. With
m is beyond a certain threshold, the new employed trajectories become geographically far away from those of target suspects, thus posing lower and lower impacts on the transition patterns of the focus areas where the targeted suspect stayed. Therefore, the TEs of all models tends to be a constant value at this stage. For instance, the TEs of CMoB and Markov tend to 800 m and 1200 m, respectively, when
m > 6. This situation also suggests that a large value of
m (too many similar suspects) will have little influence on the performance of the prediction model. Here, when
m increases to 20, the performance of the proposed CMoB still excels compared to the other baseline models by approximately 20–50%.
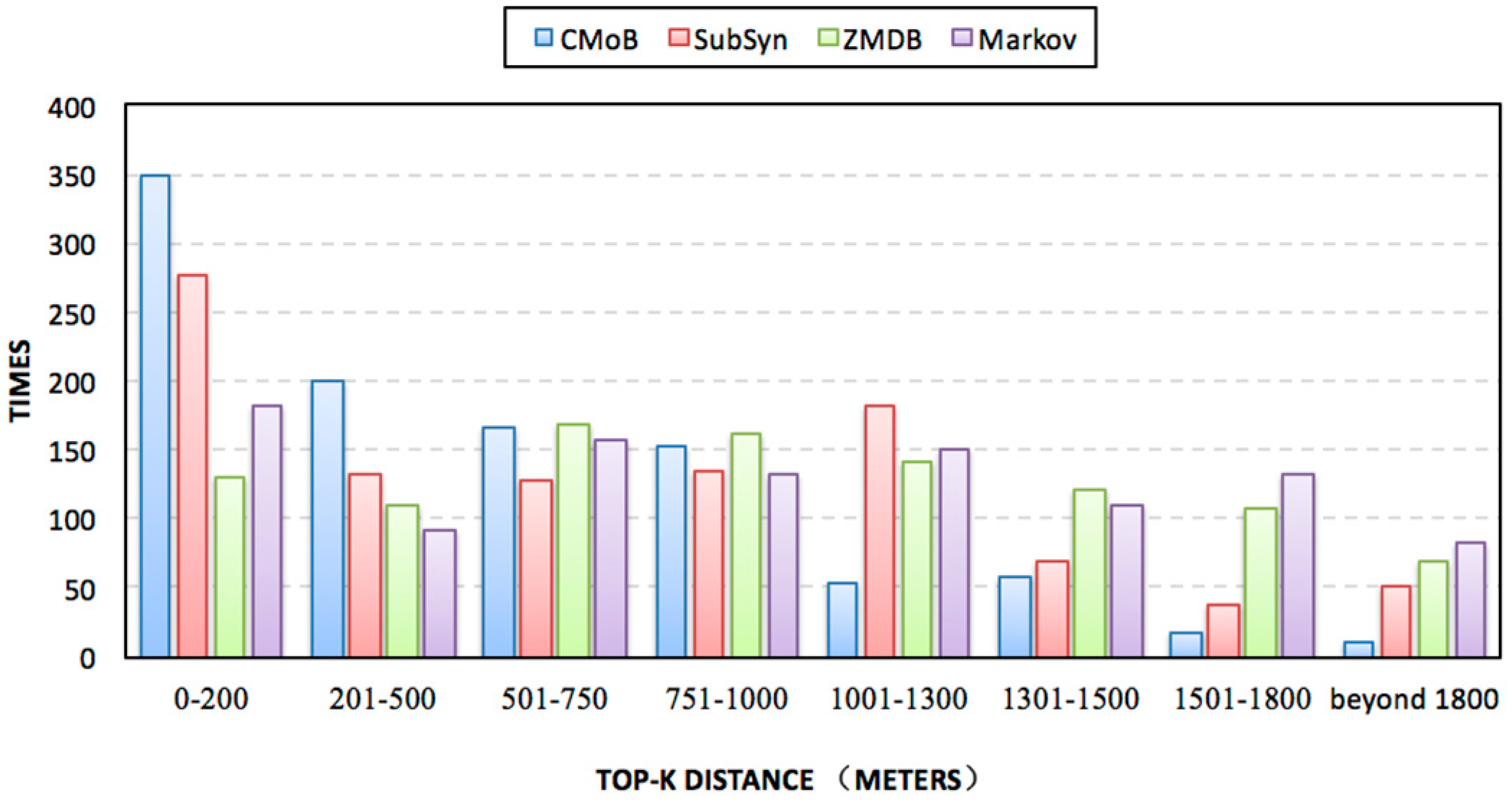
Figure 11 gives the histogram of the occurrences for different TEs during experiments, where the high occurrence at low TE represents excellent performance. From the plot, we can find that the occurrences of CMoB at TE < 500 m accounted for 50% of the total occurrences, showing that most predicted locations of CMoB are close to the correct destinations compared to other baseline methods. As TE increased, the occurrences of CMoB reduced dramatically, with approximately 90% of the total occurrences being concentrated in TE < 1000 m. For SubSyn, the occurrences demonstrate a decreasing tendency as TE increases, and approximately 40% of the occurrences are allocated in TE < 500 m, while approximately 68% are located with TE < 1000 m. For ZMDB and Markov, the discrepancies of occurrences along with different TD are inconspicuous. Their 50% of occurrences remained at TE > 1000 m, implying extremely low performances when they confront the data sparsity problem. Moreover, for Markov, there are 82 occurrences appearing for TE between 750 m and 1800 m, which is the largest value among all models, indicating the worst performance among all models.
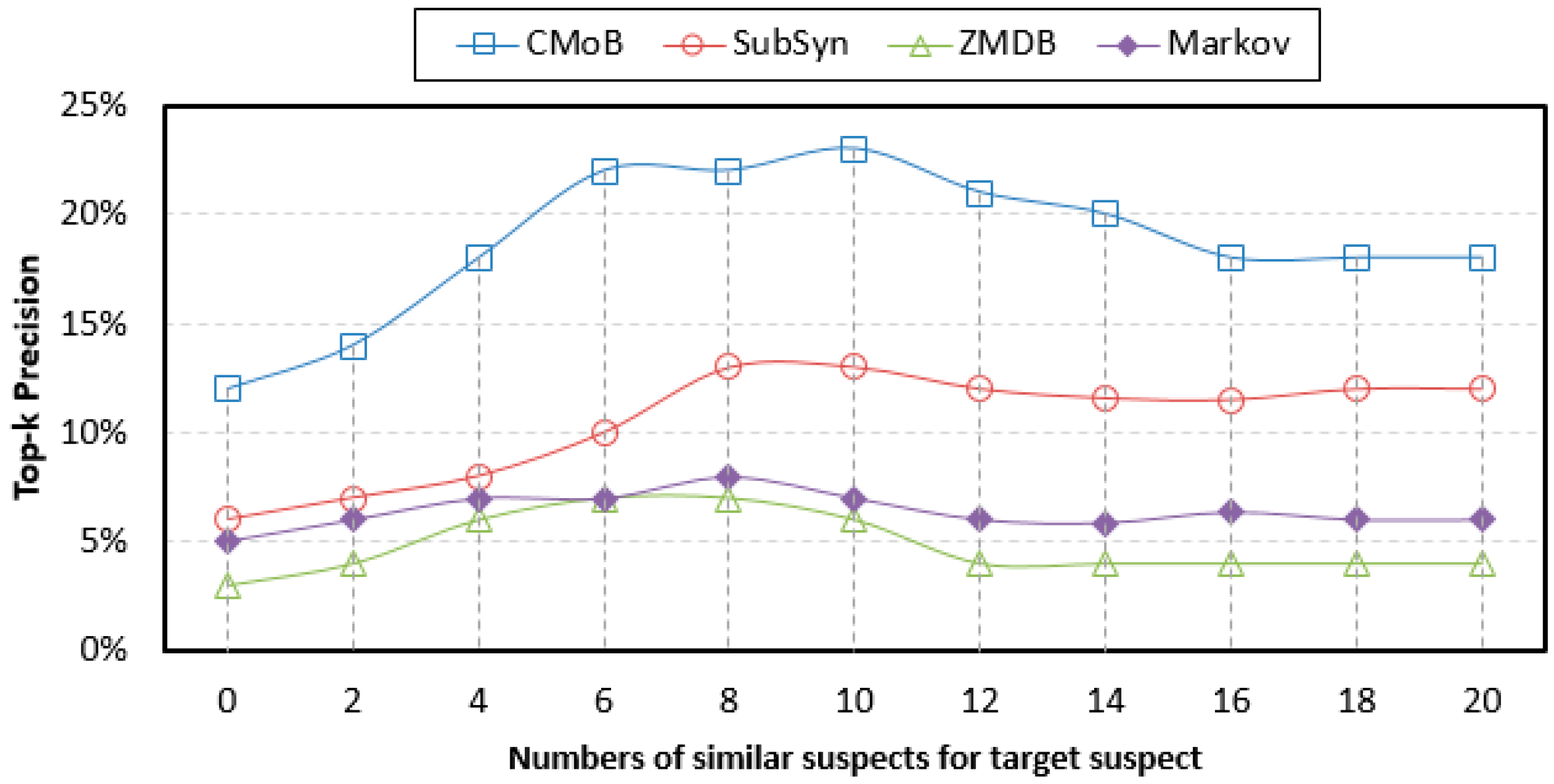
4.5. Evaluation of Top-k Precision
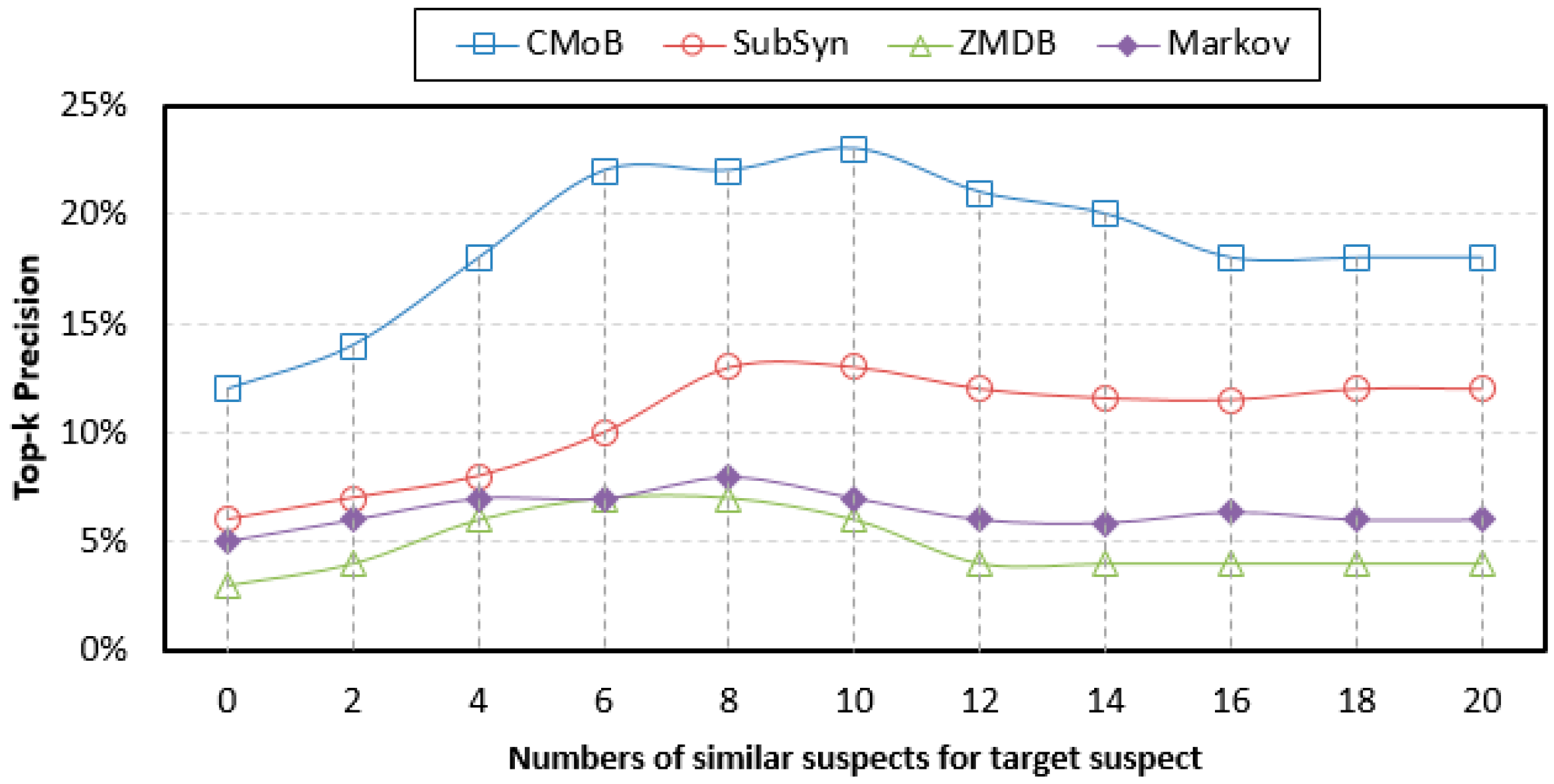
From
Figure 12, we can discover that with the growth of
m, the TP (top-
k precision) of our CMoB are distributed in 12–23%, higher than those of the three baseline methods, in which the performance of ZMDB is the lowest, with its best TP being only 7%. When
m = 0, our CMoB achieves 12% on TP, which is higher than those of the others by 100–200%, implying that CMoB has the ability to reveal transition patterns for more locations. With the growth of
m, more newly employed mobility data are located in the areas where the target suspect concentrated on so that all prediction models are able to obtain the transition patterns for more locations, resulting in the improvement in their performances on TP. For example, as
m increased from 0 to 10, the best TP of CMoB reached 23%, with the improvement rate being beyond 90%, higher than the other three baseline methods by 100–300%. Along with the growth of
m, more mobility data of un-similar suspects are introduced, which makes TPs of the four models gradually decline to some fixed values, according to the same reason explained in
Section 4.4, when the performances of TE also declined to fixed values as
m increased beyond a certain threshold.
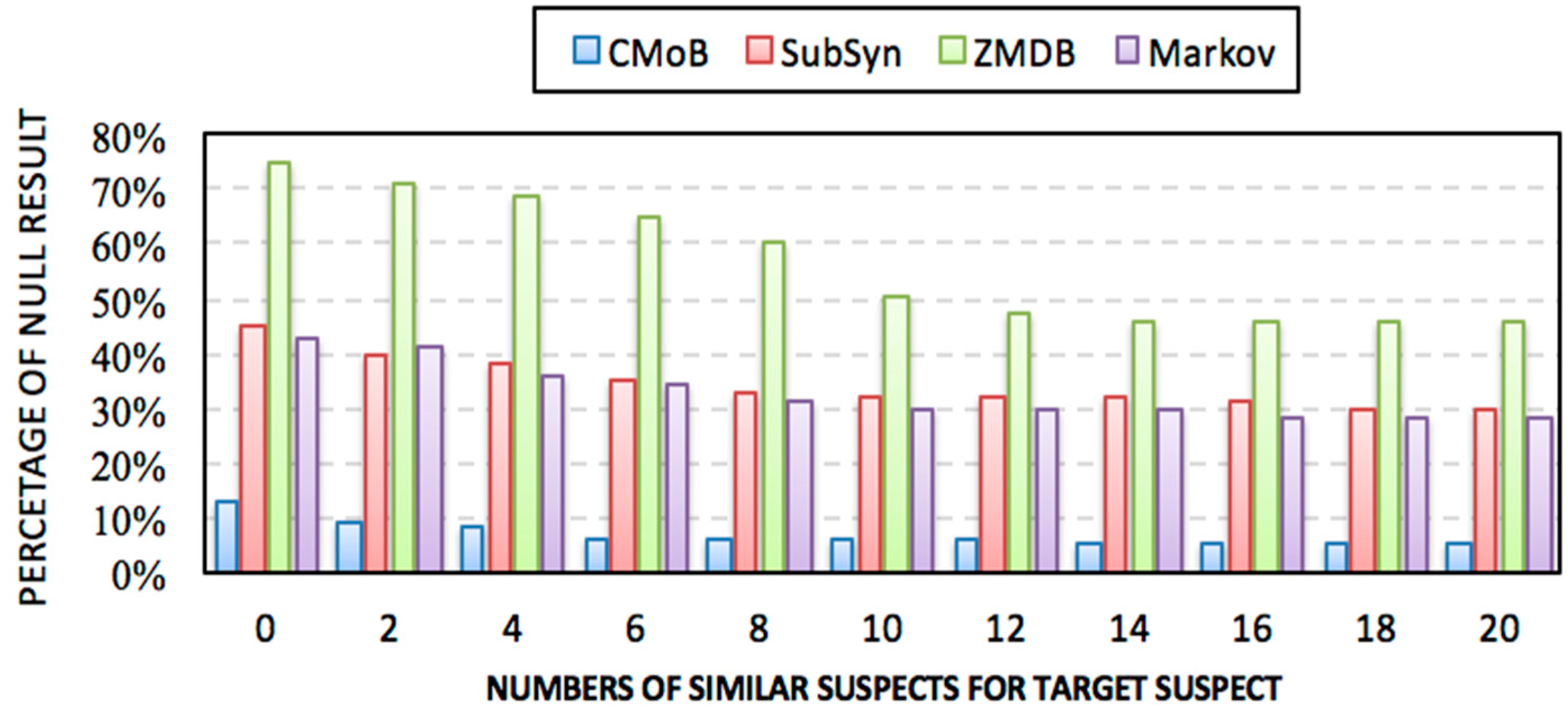
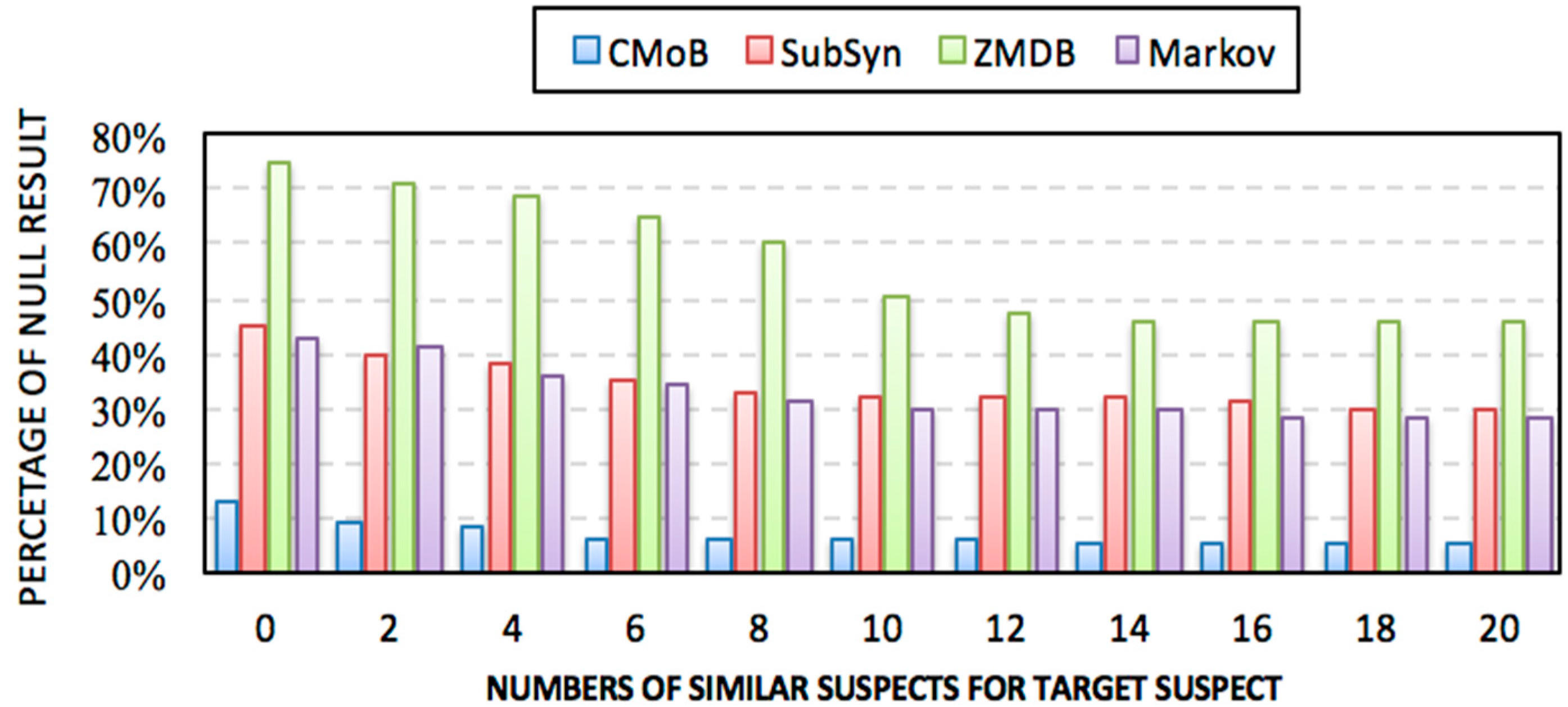
4.6. Evaluation of Missing Percentiles
Figure 13 shows that the missing percentiles (MP) of all models decrease along with the increase of
m. Specifically, CMoB achieves the best performance among them with the MP below 10% most of the time. Compared with CMoB, the performance of ZMBD remains the lowest at all times, with its MP up to 45%, while the MPs of SubSyn and Markov are all higher than 30% for the most part. Moreover, for the metric of average MP, CMoB is five times lower than SubSyn, eight times lower than ZMDB and four times lower than Markov, indicating that data sparsity is fatal to the robustness of the model, which lacks appropriate solutions to address the issue.
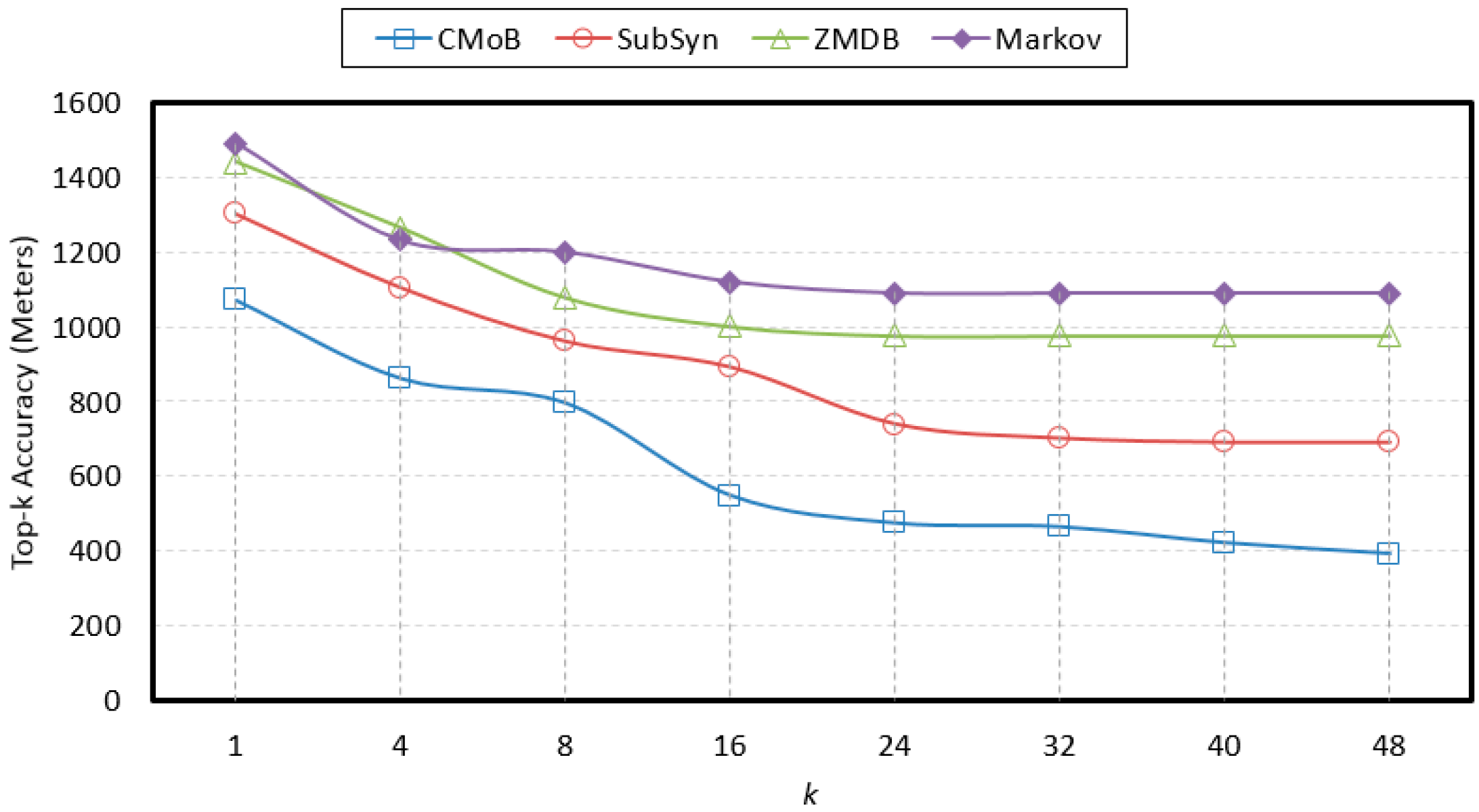
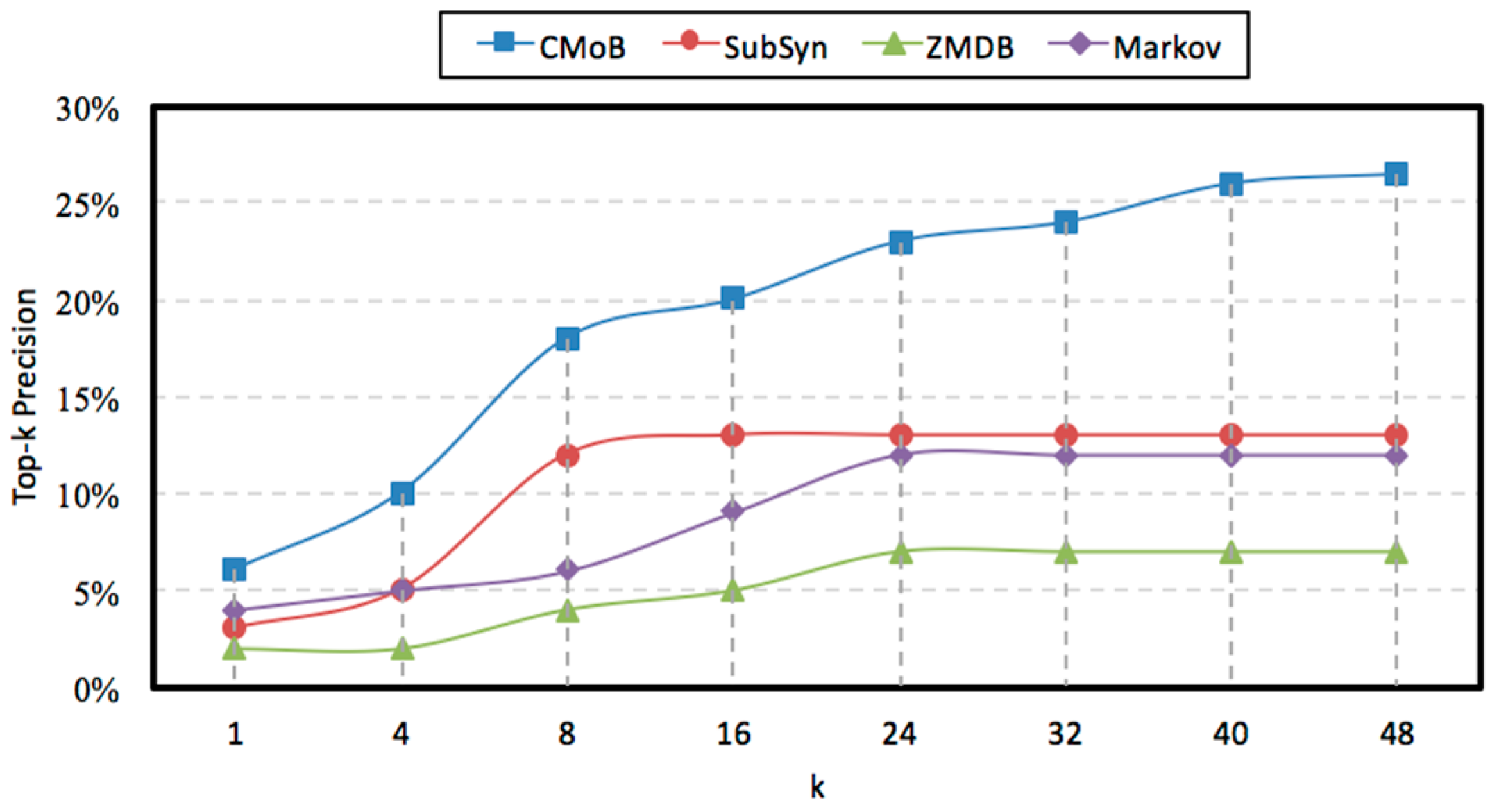
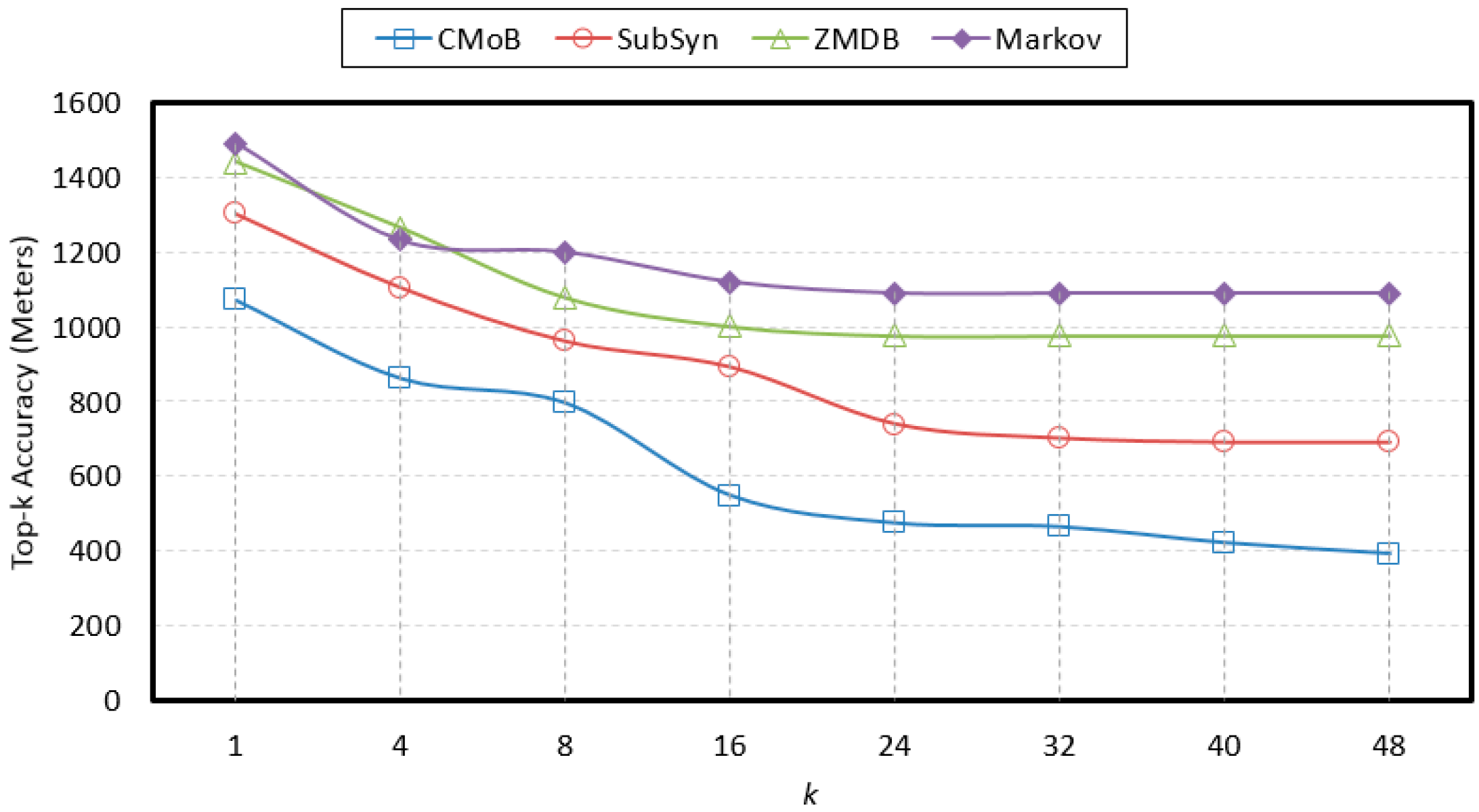
4.7. Evaluation of k
With the rise of
k, the variations of prediction performances on TE and TP are shown in
Figure 14 and
Figure 15 when
m = 20. It can be observed that the performances of CMoB are much better than the other 3 baseline methods at any
k value. Meanwhile, as
k reaches a critical value, the performances of SubSyn, ZMDB and Markov on TP and TE no longer changed. For example, when
k > 24, the TE of ZMDB and Markov stopped at 976 m and 1091 m, respectively. Similarly, when
k > 24, the TP of Markov and SubSyn no longer change, staying at 14% and 12%, respectively. However, with the increase of
k, the performances of CMoB continued improving, where its TE falls down from 1072 m to 392 m and TP increases from 6% to 27%. Moreover, the improvement rates of CMoB on the two metrics are still the largest among these four models. This is because CMoB can obtain the transition patterns for more locations so there were more candidate predicted locations in its results. With the growth of
k, the opportunities for observing shorter distances between the correct destination and the top-
k candidate locations increase, and the correct destination is more likely to be found in the top-
k candidate results. However, for the other three baseline methods, the numbers of candidate predicted locations in their results are very small or even equal to zero due to the data sparsity. Consequently, once
k is beyond a critical value, there is no other candidate predicted location left to improve their performances on TP and TE.
It will not detail the sensitivities of k using different m since the results were similar. Therefore, regardless of how k and m varied, CMoB achieved better prediction performances compared to the other 3 baseline methods.
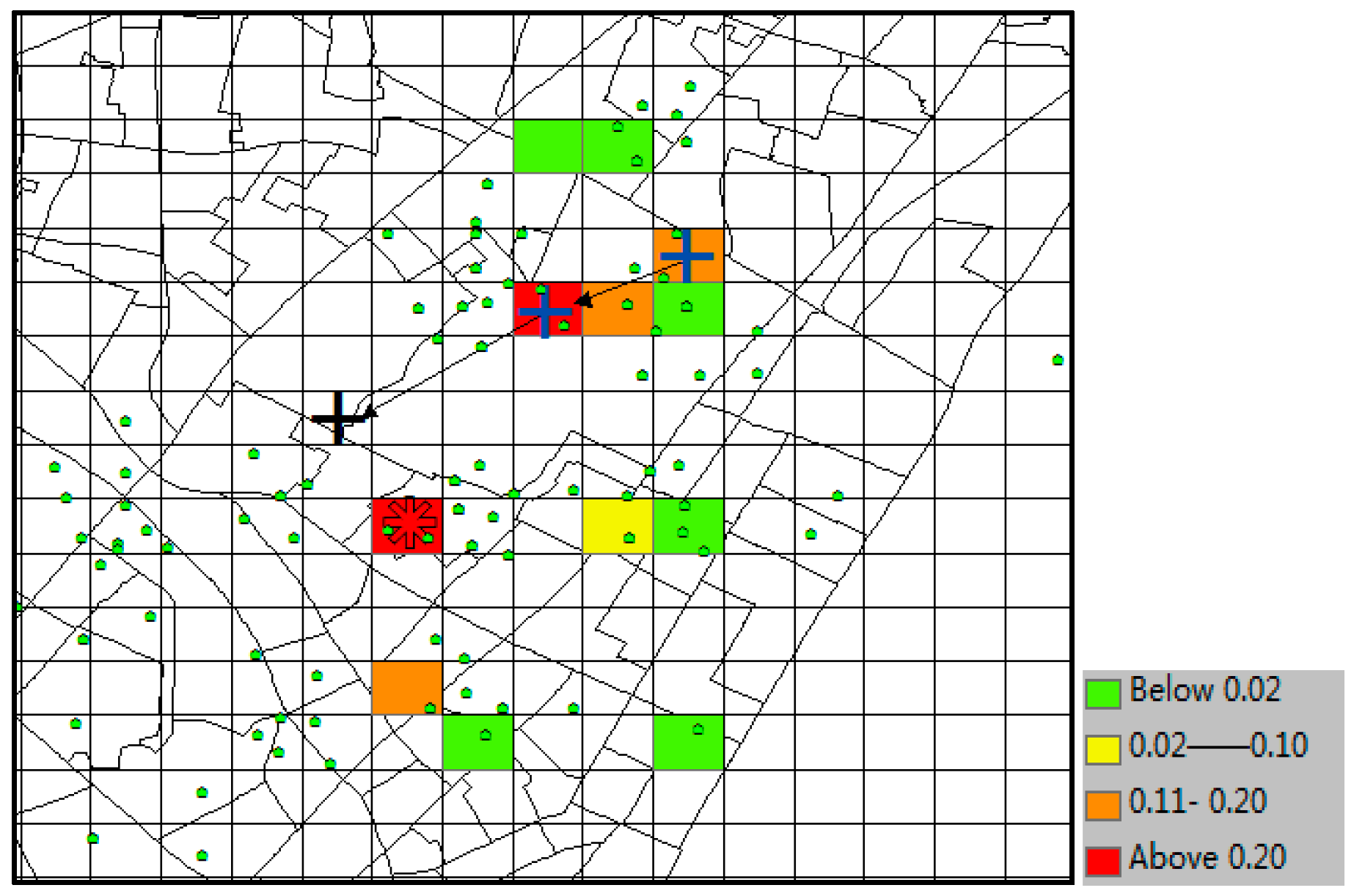
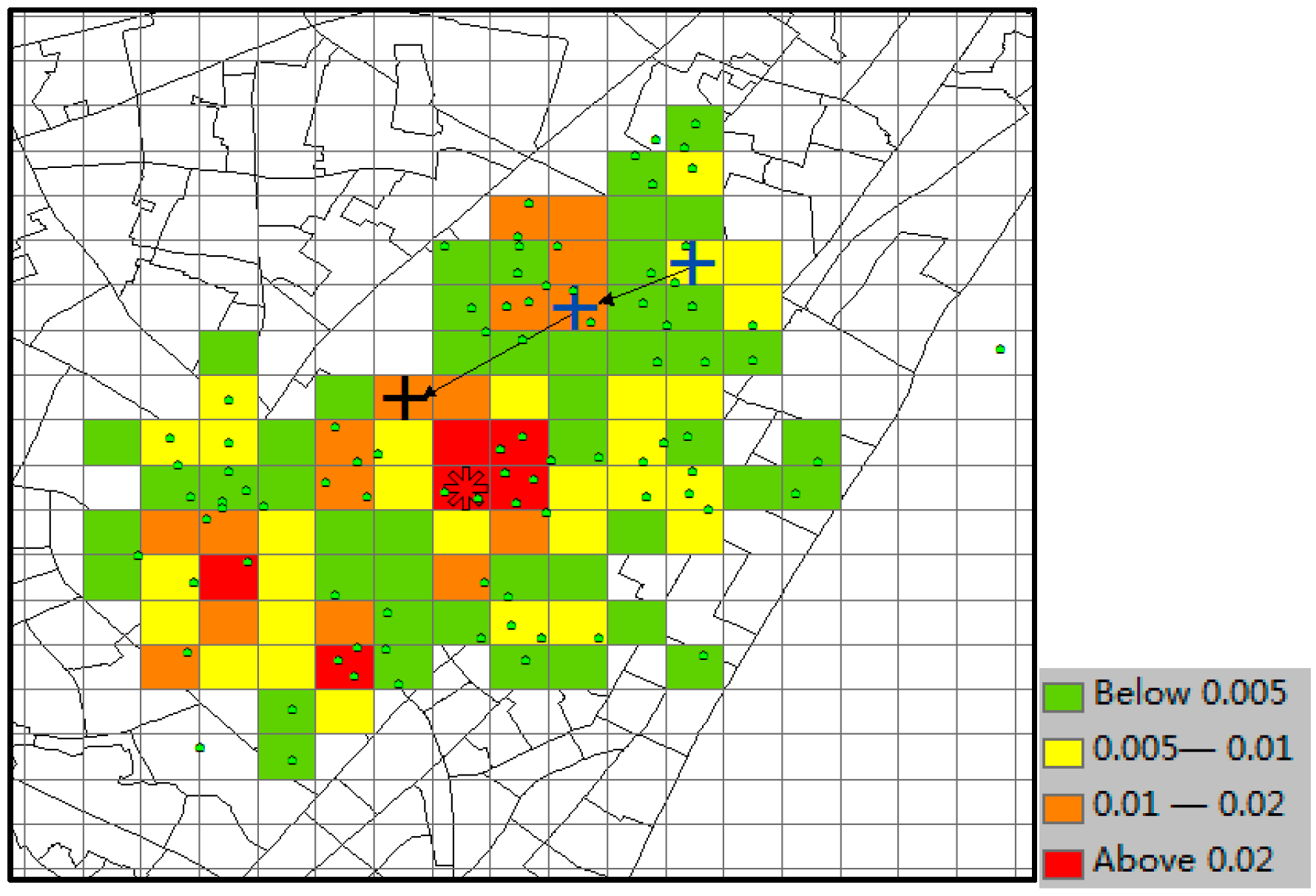
4.8. Visualizations of Prediction Results
This section gives visualization examples of the four models for one prediction test using the same dataset.
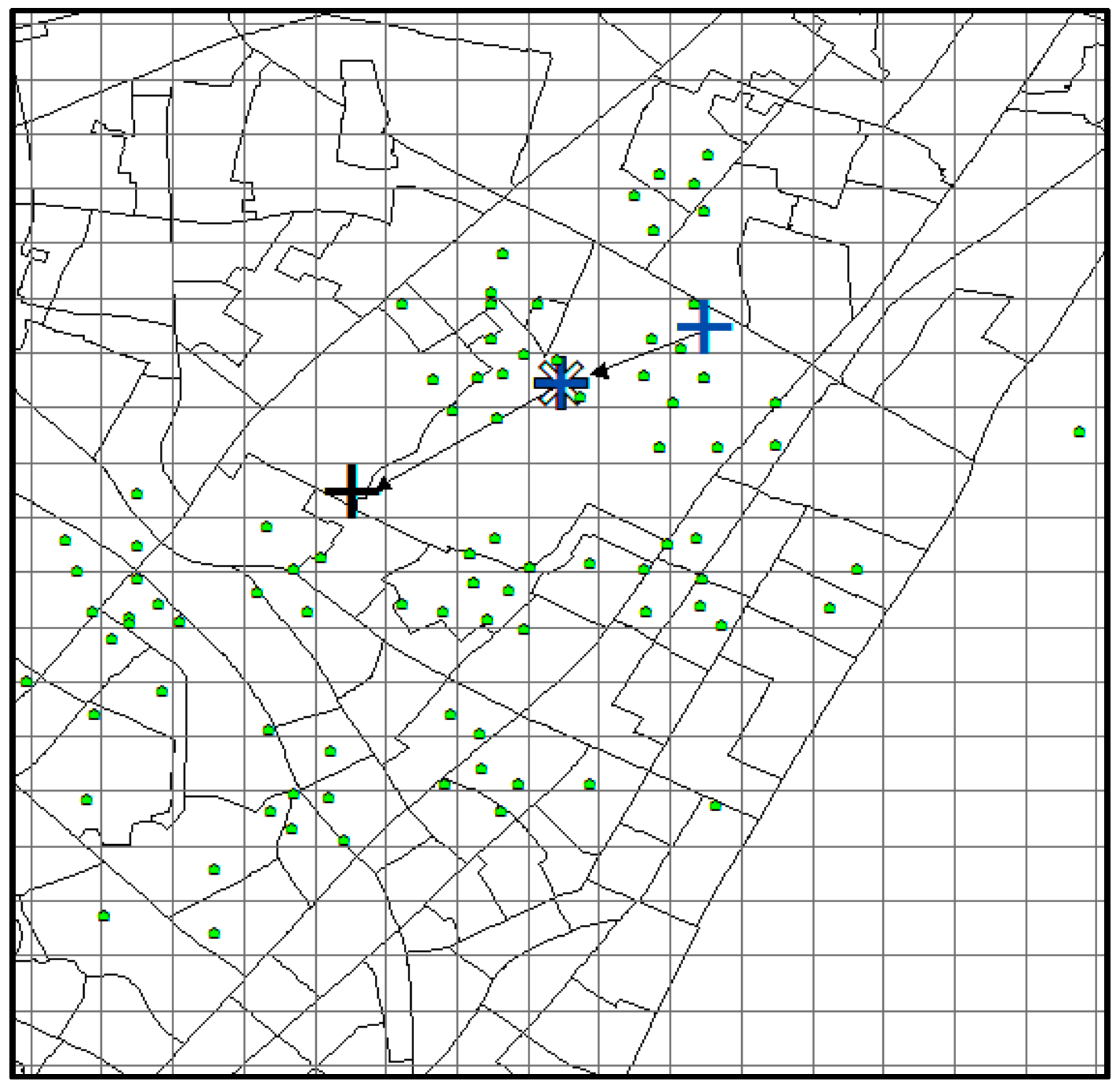
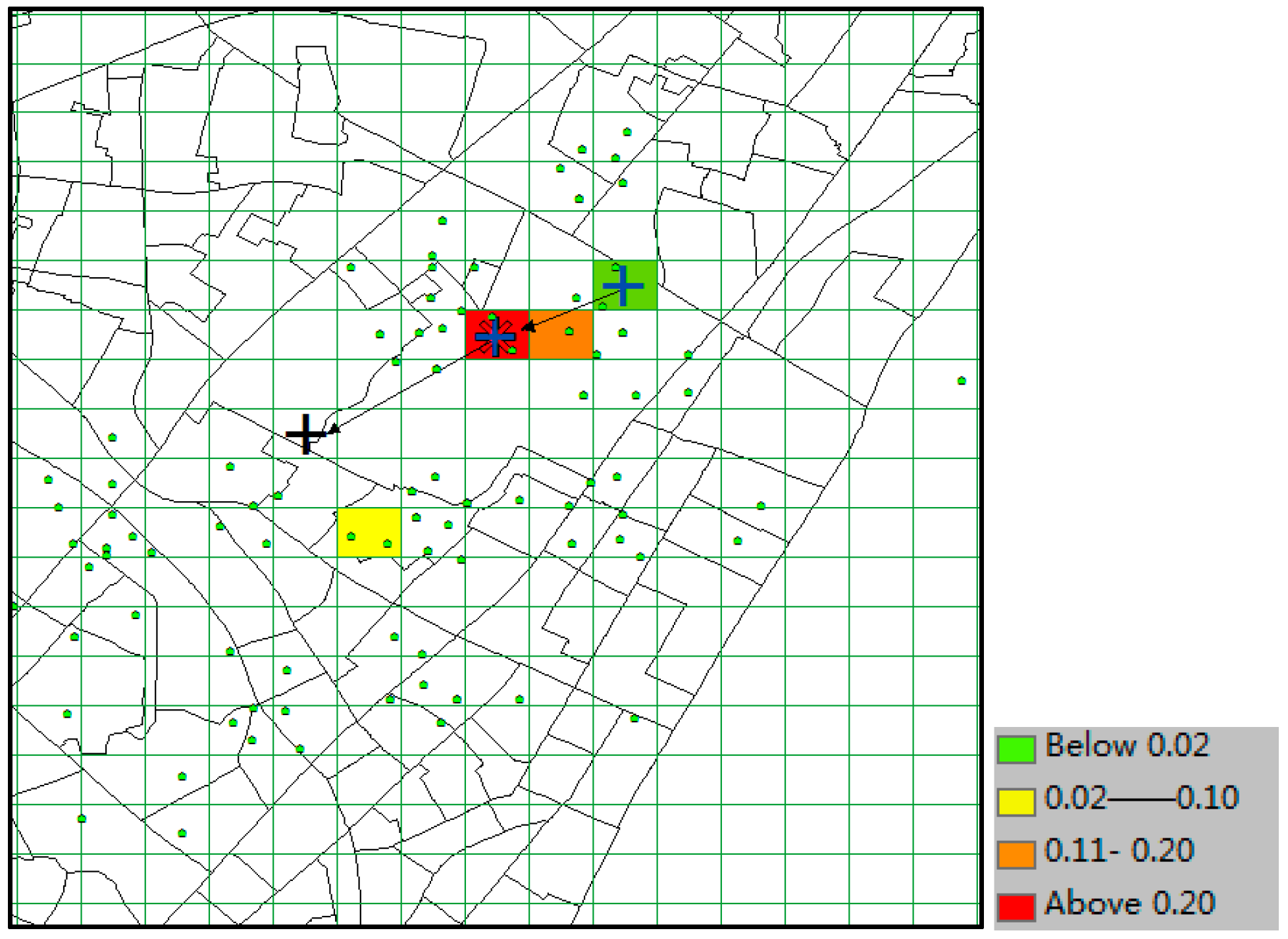
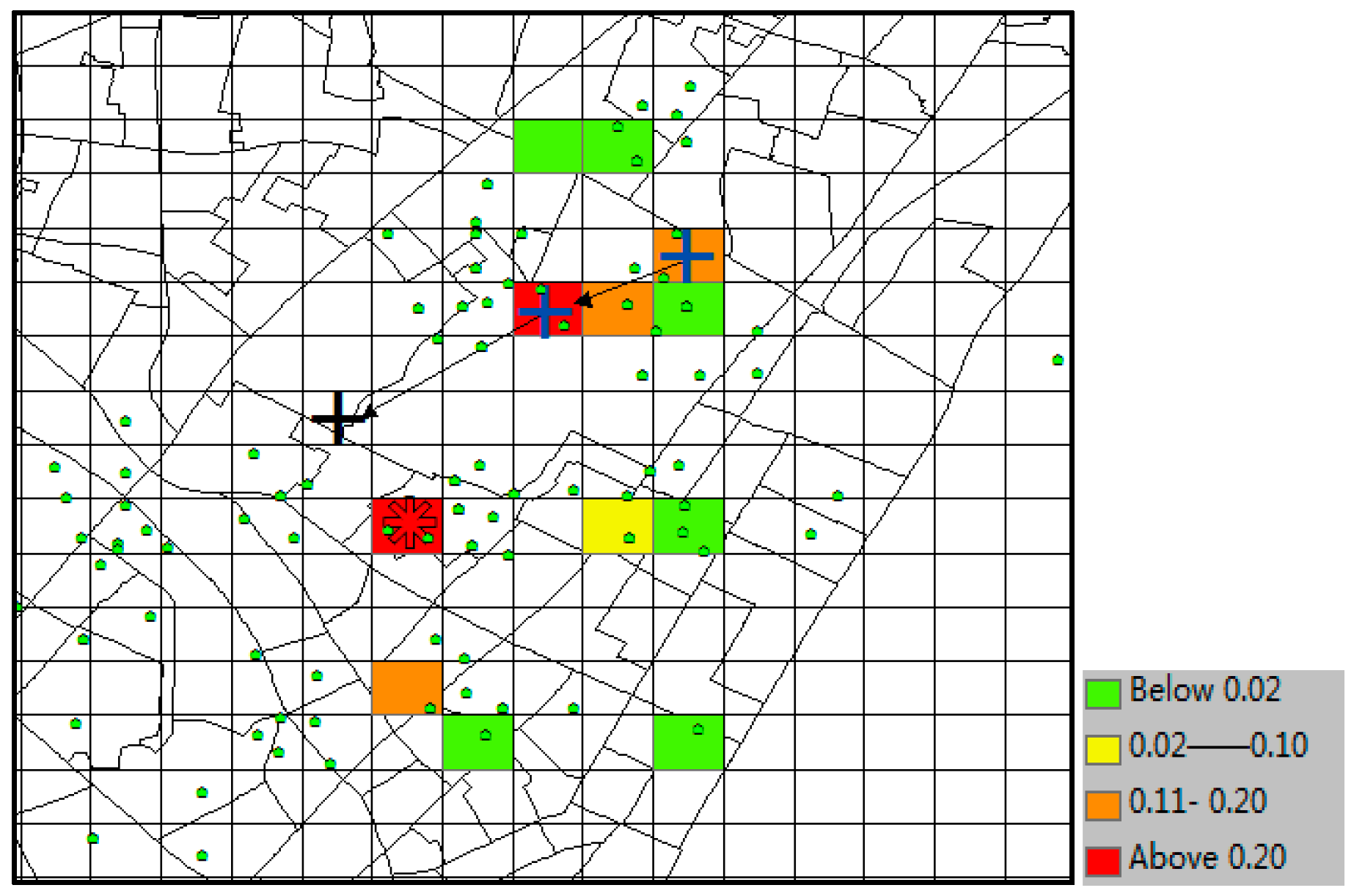
The predicted result of CMoB is shown in
Figure 16, where the little green dots represent the visiting venues of the target suspect and his/her similar suspects (some dots overlap with each other), the query trajectory is composed of blue “+” and black arrows, and the colored grid denotes the predicted locations with the probabilities in decreasing order according to red-orange-yellow-green. The symbol “*” denotes the predicted location with highest probability, and the correct destination is represented as the black “+”, which is included in the predicted result set as the 8th highest probability. In this experiment, when
k ≥ 8, this can be considered as a correct time with its TE = 0 m. From the plot, we can discover that the correct destination was an unobserved location that is never visited by the suspects, though it was still selected among the candidate predicted locations due to the outstanding ability of our model to learn transition frequencies of unobserved locations from sparse mobility data.
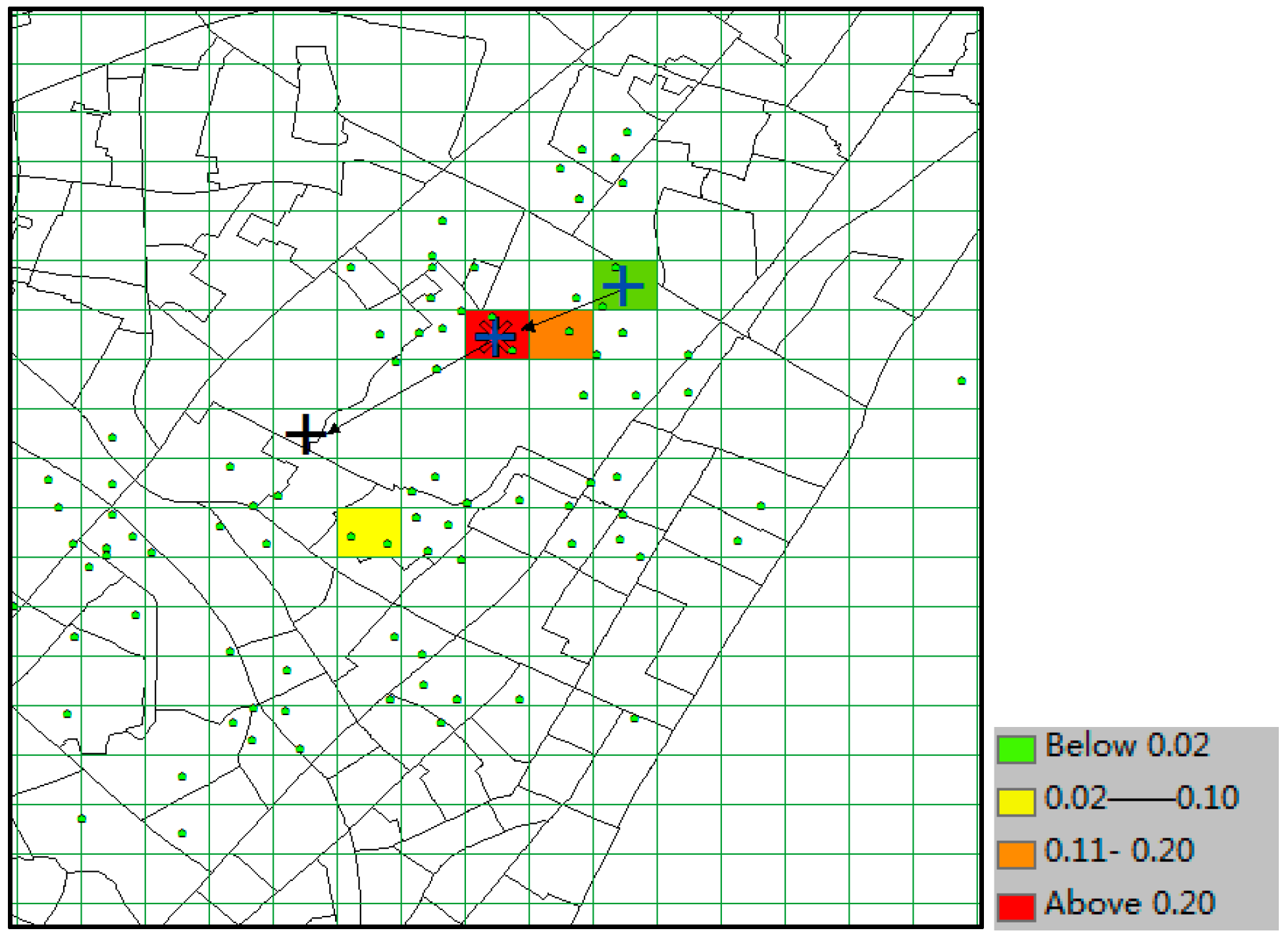
With the same prediction condition, the predicted results of SubSyn are shown in
Figure 17. From the plot, we can see that this model is unable to include the correct destination (black “+”) into its prediction result set (no color in that grid). Therefore, when
k ≥ 8, this cannot be considered as a correct time, and its TE is 300 m (the distance between the grids of black “+” and “*”).
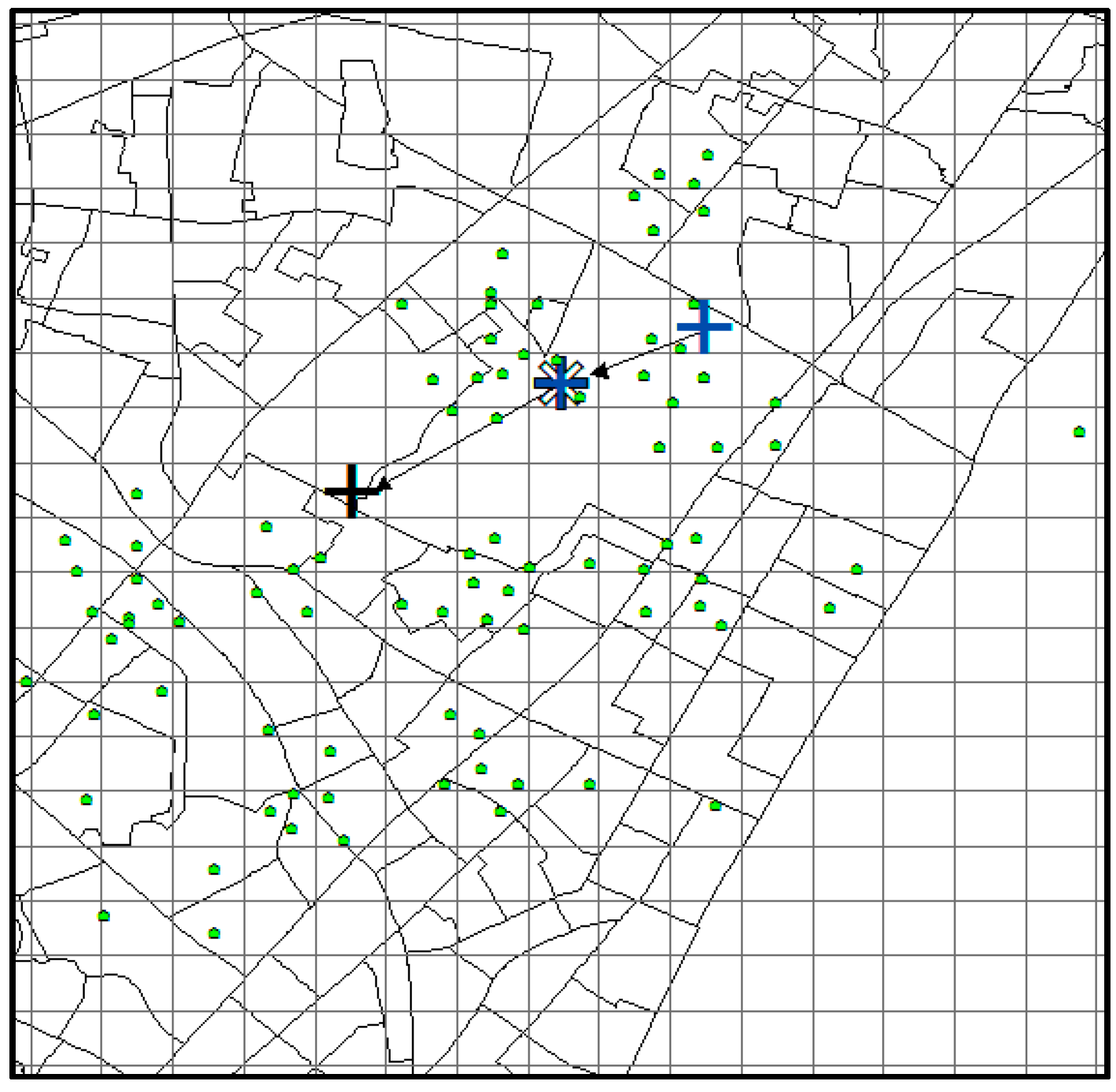
With the same prediction condition, the predicted results of ZMDB are shown in
Figure 18. Because there is no trajectory in the dataset containing the query trajectory (2 blue symbols of “+” ) with the number of trajectory points being greater than 2, the prediction result set is empty (no grid is colored). Thus, the grid of the last point (the grid covering both blue “+” and “*”) in the query trajectory was considered as the unique candidate predicted location. Hence, when
k ≥ 8, it would not be a correct time, and its TE is 700 m (the distance between the grid covering black “+” and the grid covering both of blue “+” and “*”).
The predicted result of Markov is shown in
Figure 19. Due to the sparse data, the number of candidate predicted locations (colored grid) is merely four. The model did not incorporate the correct destination (grid of black “+”) into its result set. Therefore, when
k ≥ 8, it would not be a correct time, and its TE = 300 m (the distance between the yellow grid and grid of black “+”).
5. Conclusions
This study presents an approach to effectively help police break cases by searching for the spatial correlation of crime locations with the predicted movements of numerous suspects, or it can be used to obtain an early warning of suspects’ abnormal movements if some individual suspects are predicted to leave for high risk areas. However, subject to the sparsity of mobile data, it is challenging to develop an effective location prediction model for an individual suspect using the existing algorithms [
60,
61,
62,
63]. In this paper, we propose a novel CMoB model to address this issue based on the spatiotemporal semantics. In particular, this model obtains the suspect group with similar movement preferences according to spatiotemporal semantics. Then, the mobility data of suspects in this group are fused together to learn the transition frequencies of peripheral locations surrounding trajectory locations by a KDE smoothing method based on spatial proximities and spatial semantics. The first-order transition matrix and total transition probabilities between locations are formulated, and the Bayes-based location prediction is realized.
Experiments using real datasets showed that the proposed CMoB has outstanding predictive power compared with other methods on the metrics of top-k error, top-k precision, and missing percentiles, confirming that the proposed model is better and applicable to suspect location prediction. The declining effectiveness of the baseline methods relies mainly on two aspects. First, the sparsity of mobile data seriously undermines their robustness such that they cannot generalize to predict locations in unobserved areas. Most of the time, they can only consider the last point in the query trajectory as a single prediction result. Although SubSyn employs the trajectory data from more suspects and has better robustness compared with ZMDB and Markov, the incorporation of mobility data of un-similar suspects makes the transition patterns largely deviate from those of the target suspect, which has a negative effect on the precision of SubSyn. In comparison, our CMoB effectively lowers the negative impact caused by the sparsity of data by forcing the combination of the trajectory data of similar suspects as data sources and revealing the transition frequencies for unobserved locations based on the spatiotemporal semantics. Such efforts help reveal the comprehensive transition patterns of the target suspect and thus maintain a stable performance to advance its effectiveness by obtaining more predicted candidate locations close to the correct destinations.
The ideas suggested in this paper also play important roles in a large number of applications that require the prediction of locations from sparse observed data, such as prediction of the next terrorist attack, estimation of the commercial venue for users, prediction of the locations of enemy troops or discovery of victims in earthquake disasters. In the future, this study needs to be extended to other cities and areas where the size of the individual geo-crime data is small and thus could be biased. In this manner, the flexibility of the proposed model can further be explored. Further improvement could be achieved by employing more features, for example, leveraging suspects’ temporal preferences, personalized information, dynamical geo-social data or urban ubiquitous data, such as 110 calling data (emergence-request service data in China). A second possible improvement could be resorting to more complex prediction models, such as deep neural networks, which can conduct automatic feature abstraction and represent the strong non-linear correlation among original features. In addition, the predicted location profiles can be further enriched, which will be beneficial for the semantic locations (e.g., POI type) prediction or the next offending location estimation.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}