Stability and Gait Planning of 3-UPU Hexapod Walking Robot



Abstract
:1. Introduction
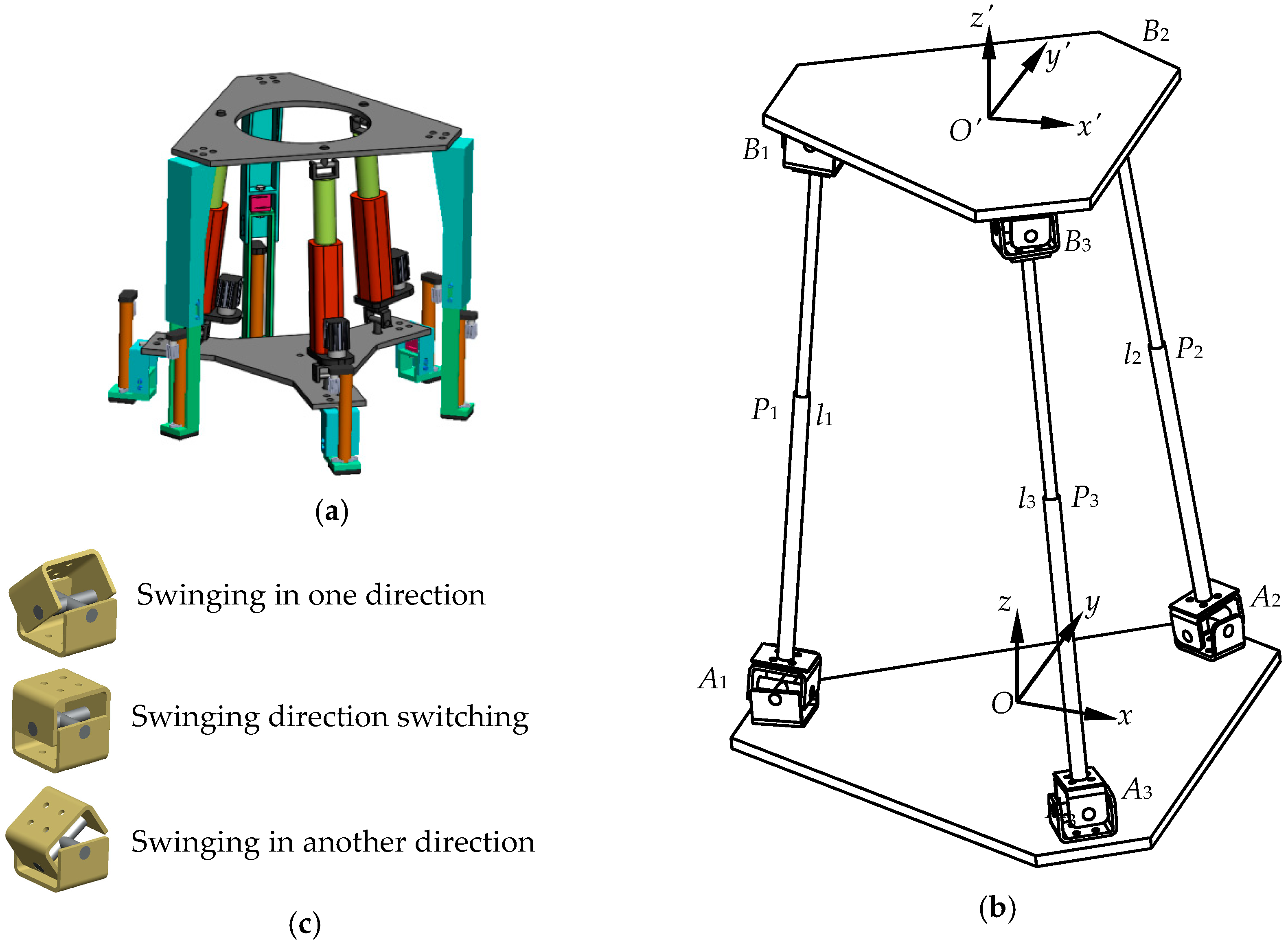
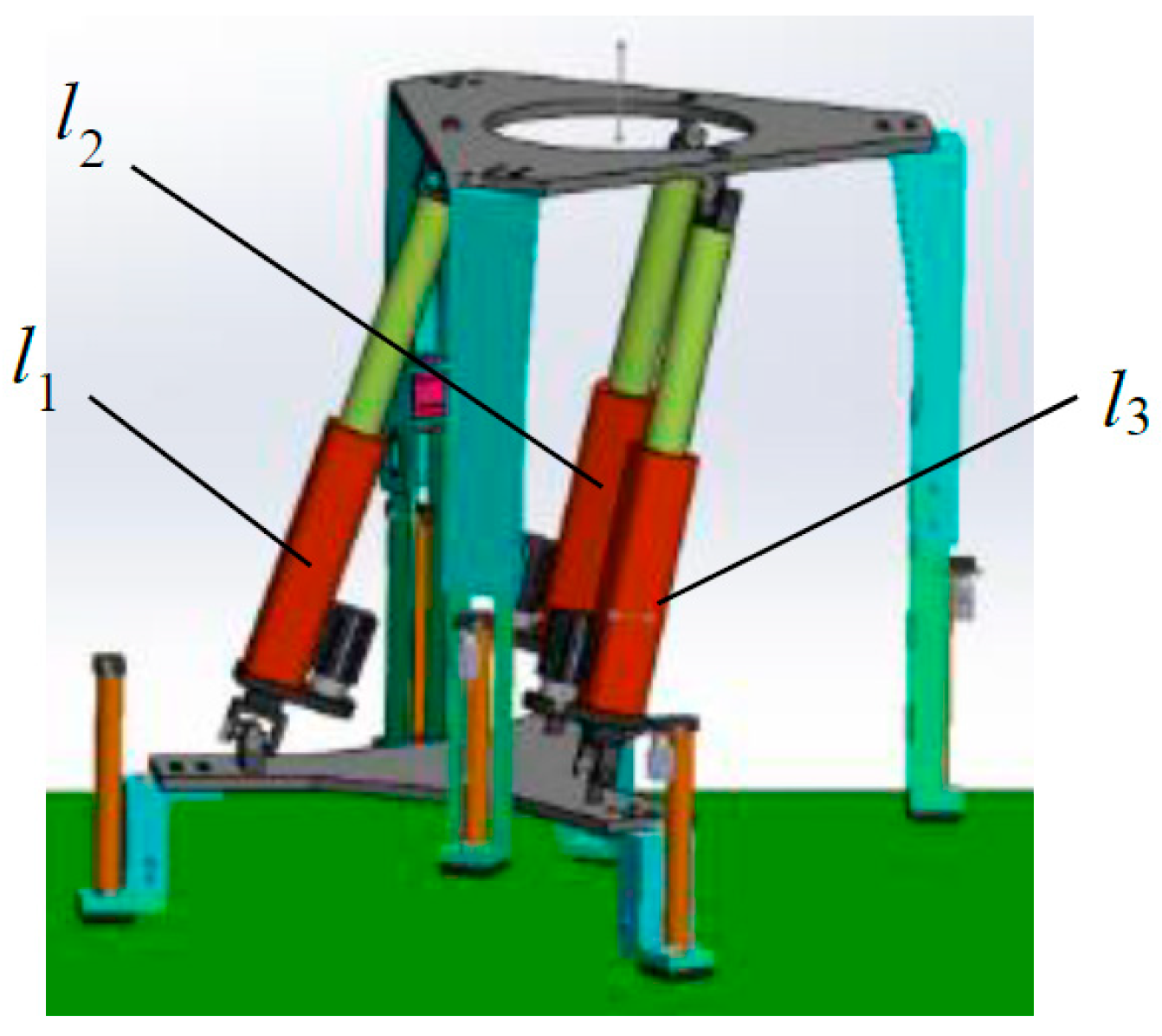
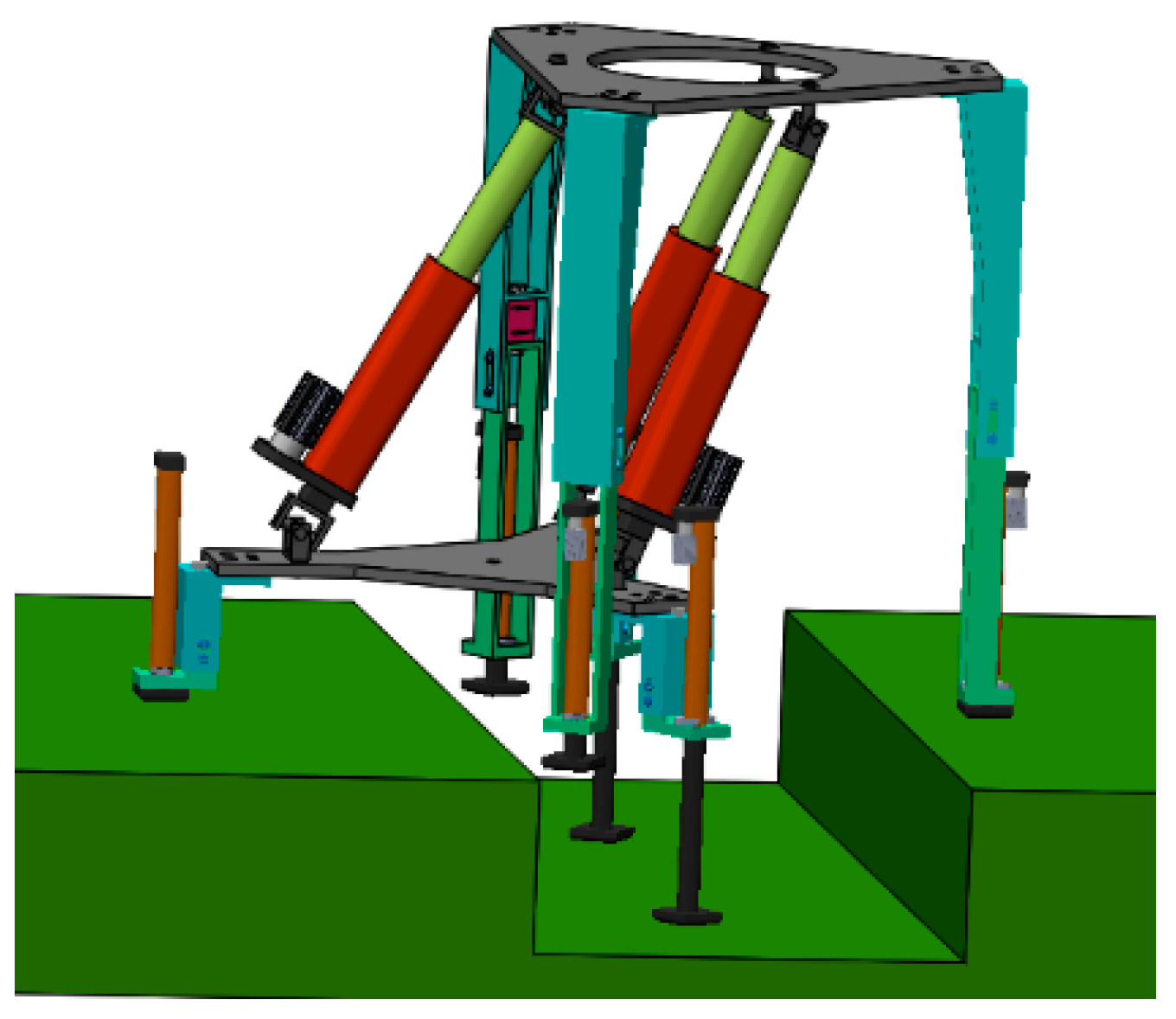
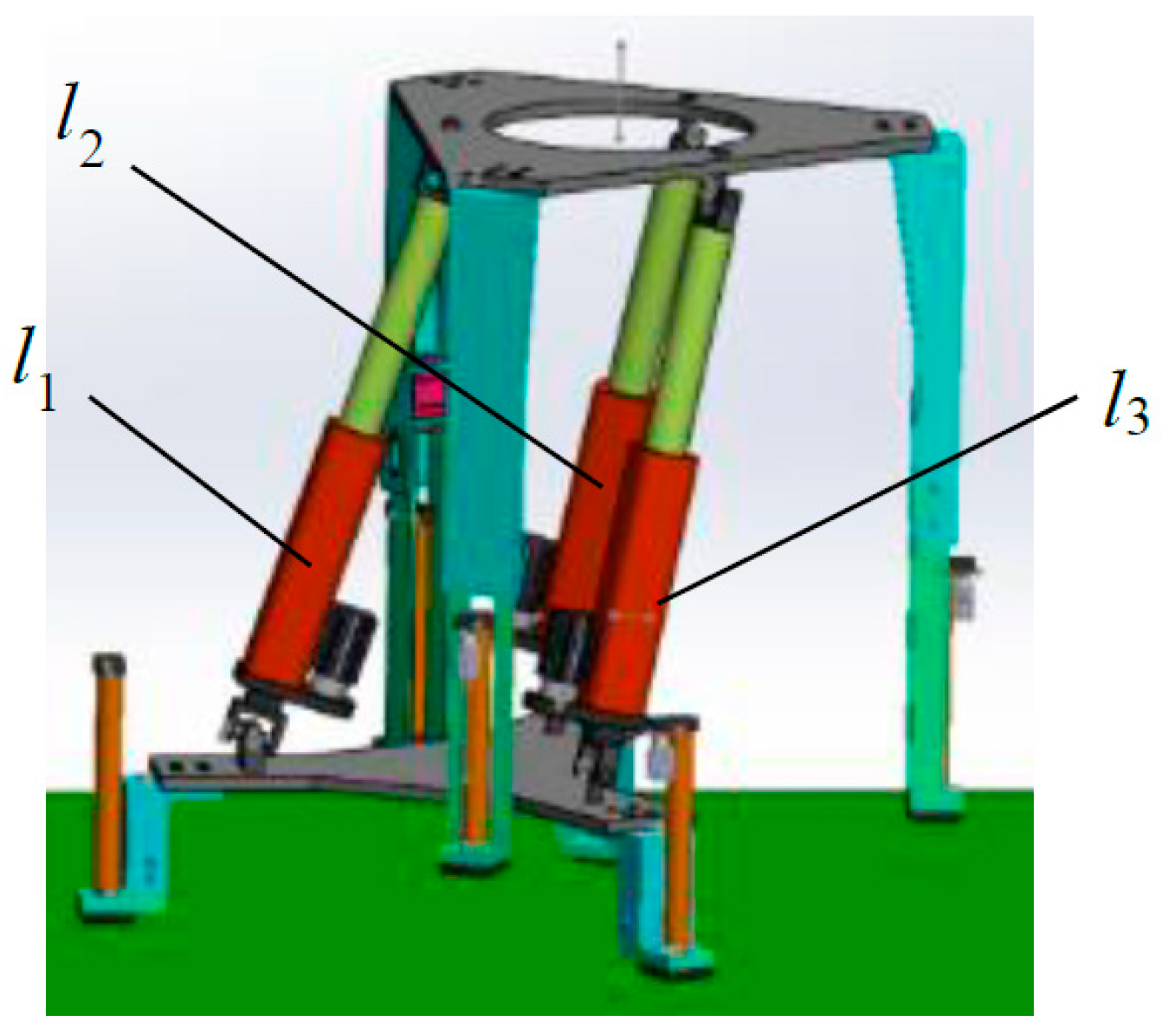
2. Configuration of 3-UPU Hexapod Walking Robot
3. Kinematics of 3-UPU Parallel Mechanism
3.1. Inverse Kinematics Solution
3.2. Kinematics Forward Solution
4. Workspace of the 3-UPU Parallel Mechanism
4.1. Factors Influencing the Workspace of the 3-UPU Parallel Mechanism
4.1.1. Shortest and Longest Distances of the Limbs
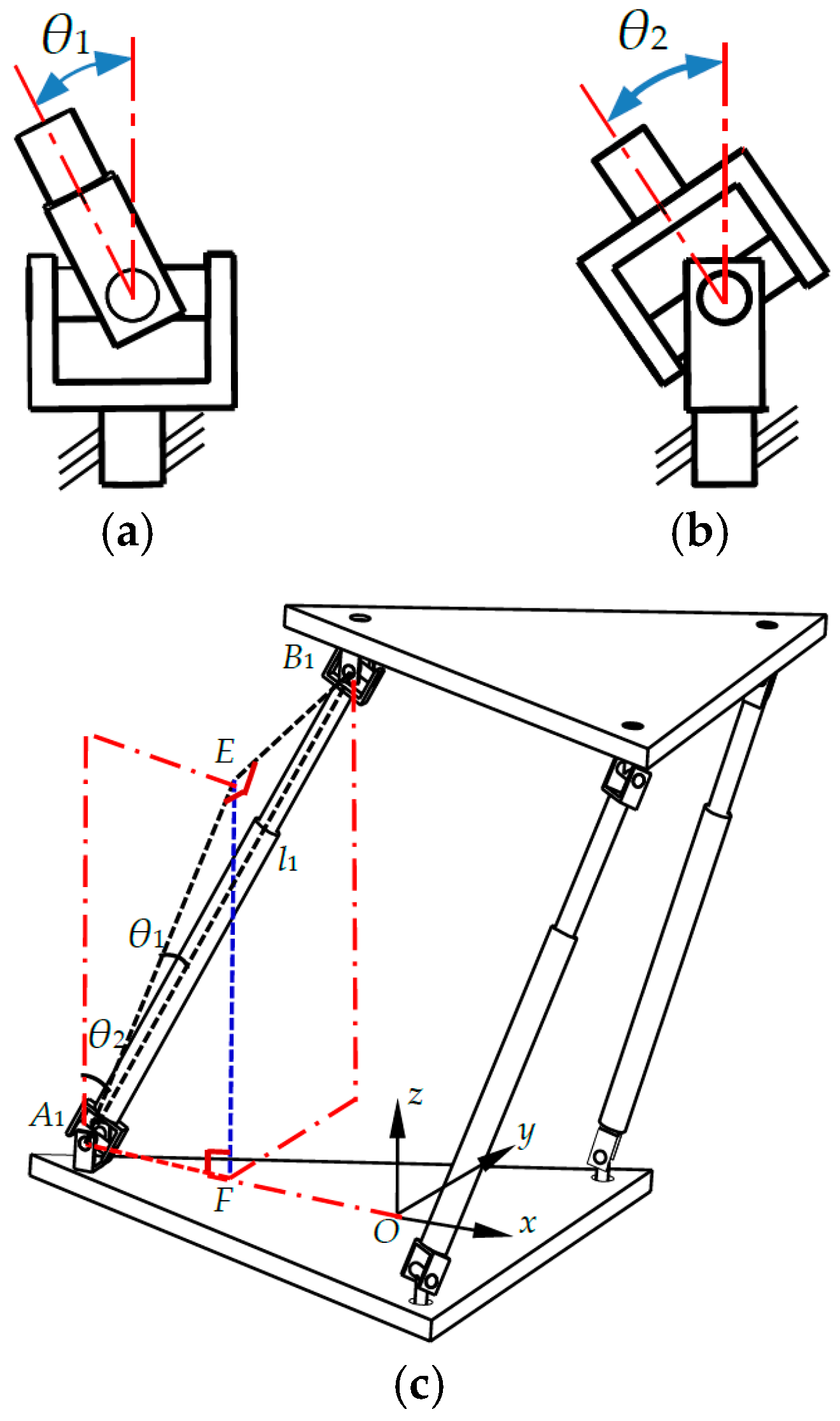
4.1.2. Rotation Angle Range of the Hooke Joint
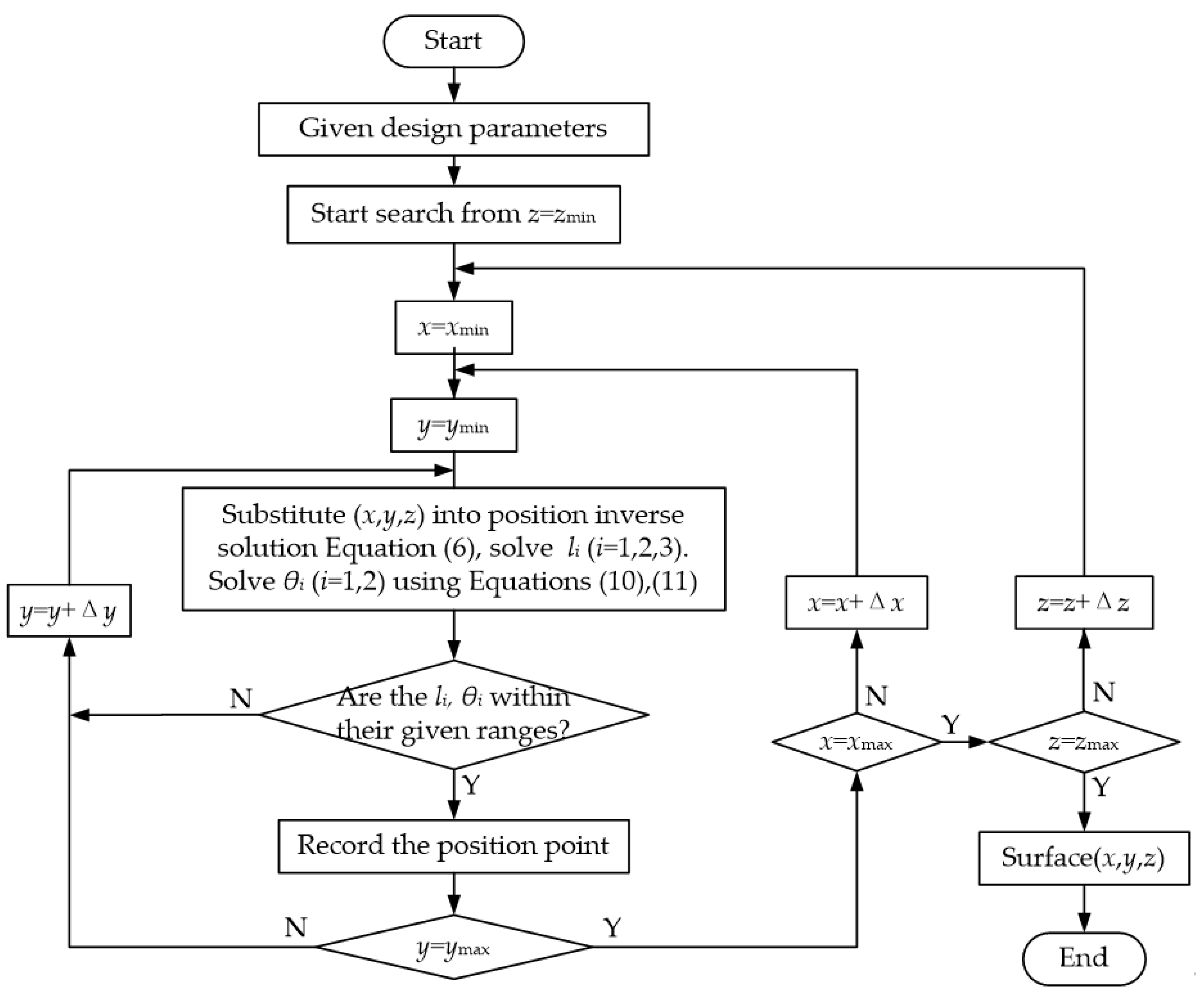
4.2. Method for Determining Workspace of the 3-UPU Parallel Mechanism
- (1)
- Defining the structure parameter of the mechanism, including: the circumradii r and R of the upper and lower platforms, the maximum travel range of the equivalent link length li (i = 1, 2, 3) of limb i, the maximum rotation angle of Hooke joint.
- (2)
- Defining the range of the coordinates (x, y, z) of the reference points of the moving platform, or, the search space.
- (3)
- The reference point coordinate is substituted into the position inverse solution equation of the mechanism, the equivalent link length li (i = 1, 2, 3) and the Hooke joint angles θ1 and θ2 in the limbs are obtained. The results are checked whether they are within the allowable range. If they are, these points are recorded.
- (4)
- The set of points satisfying the condition is the workspace of the 3-UPU parallel mechanism when a given range of values has been searched.
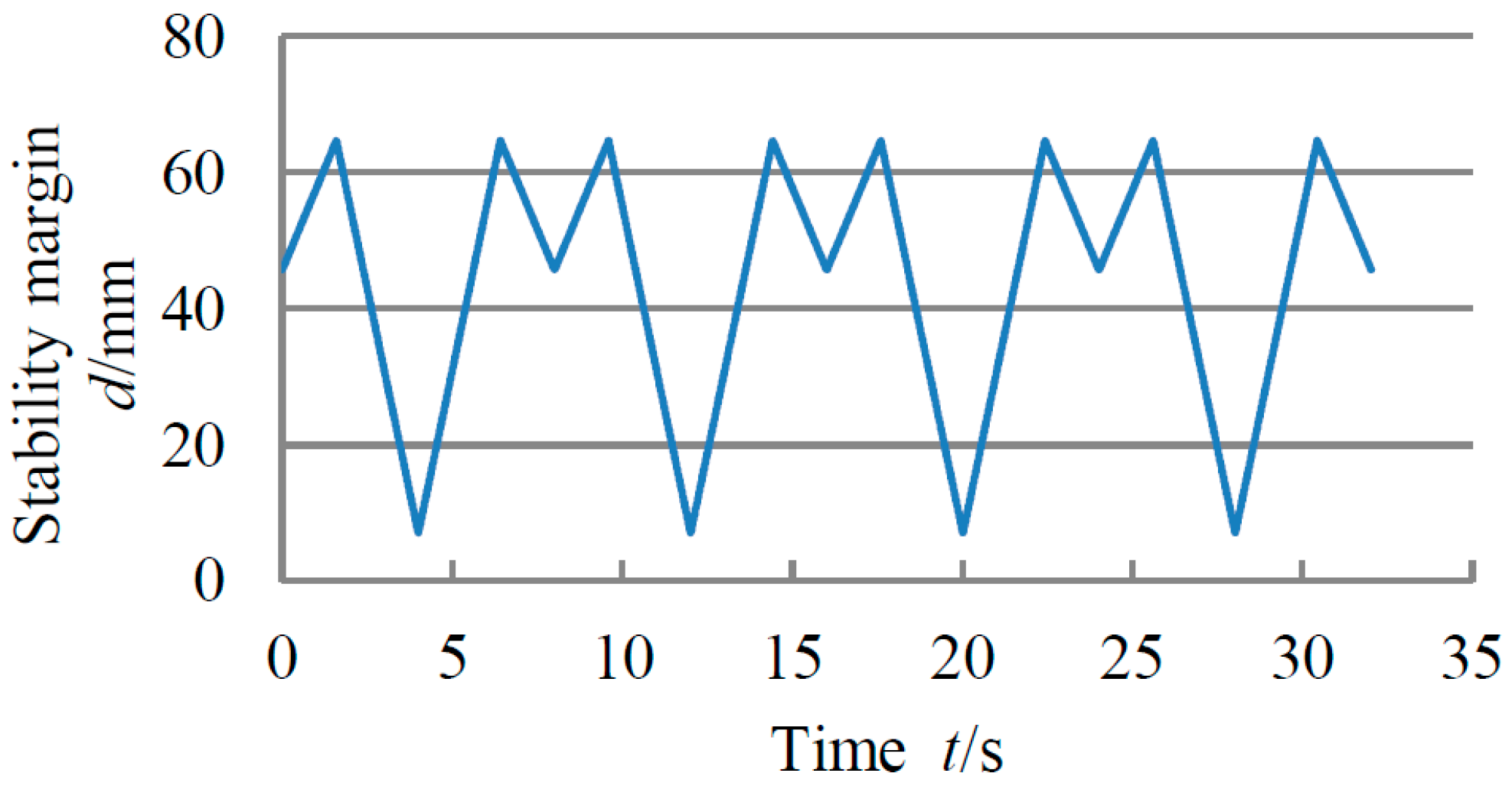
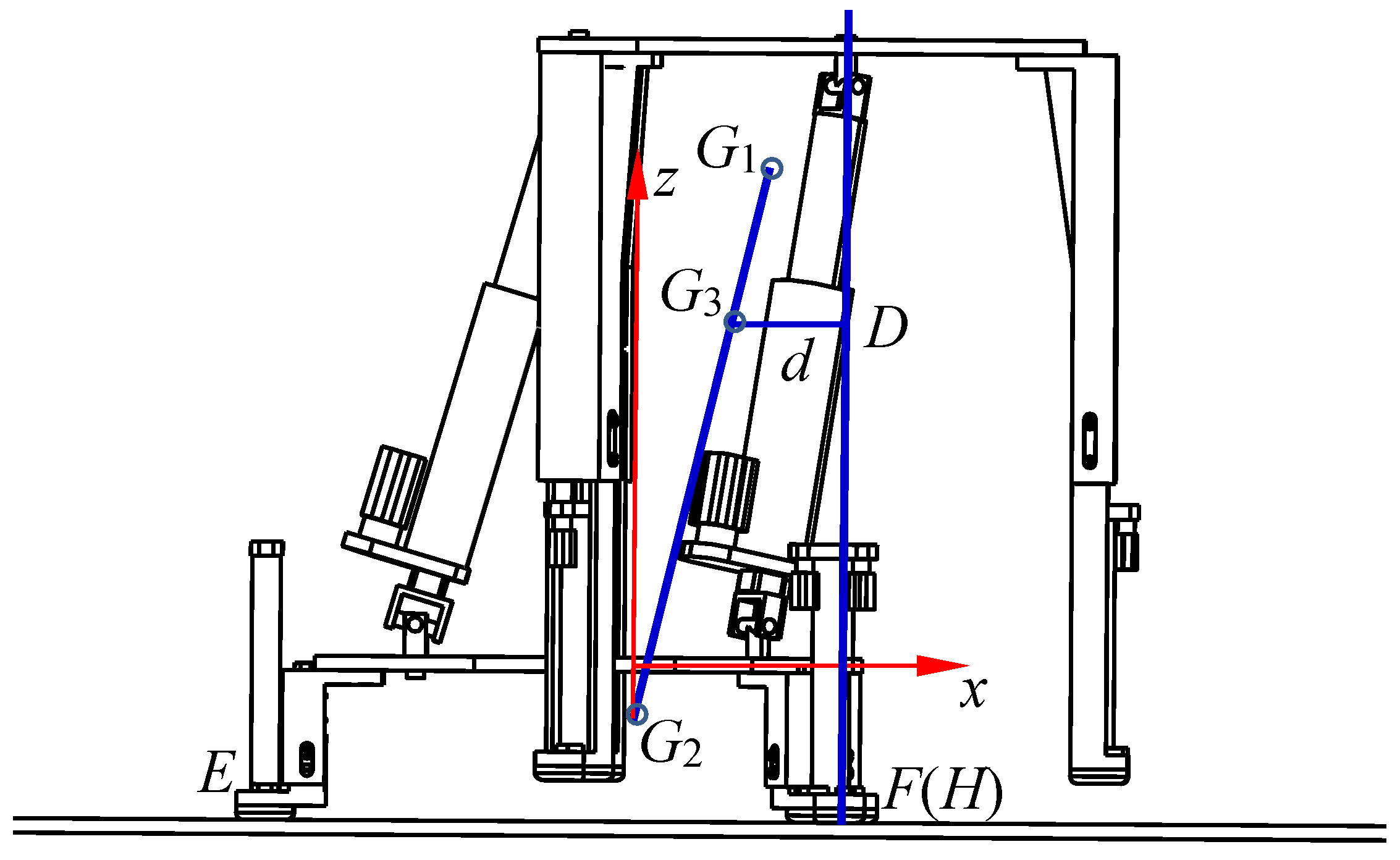
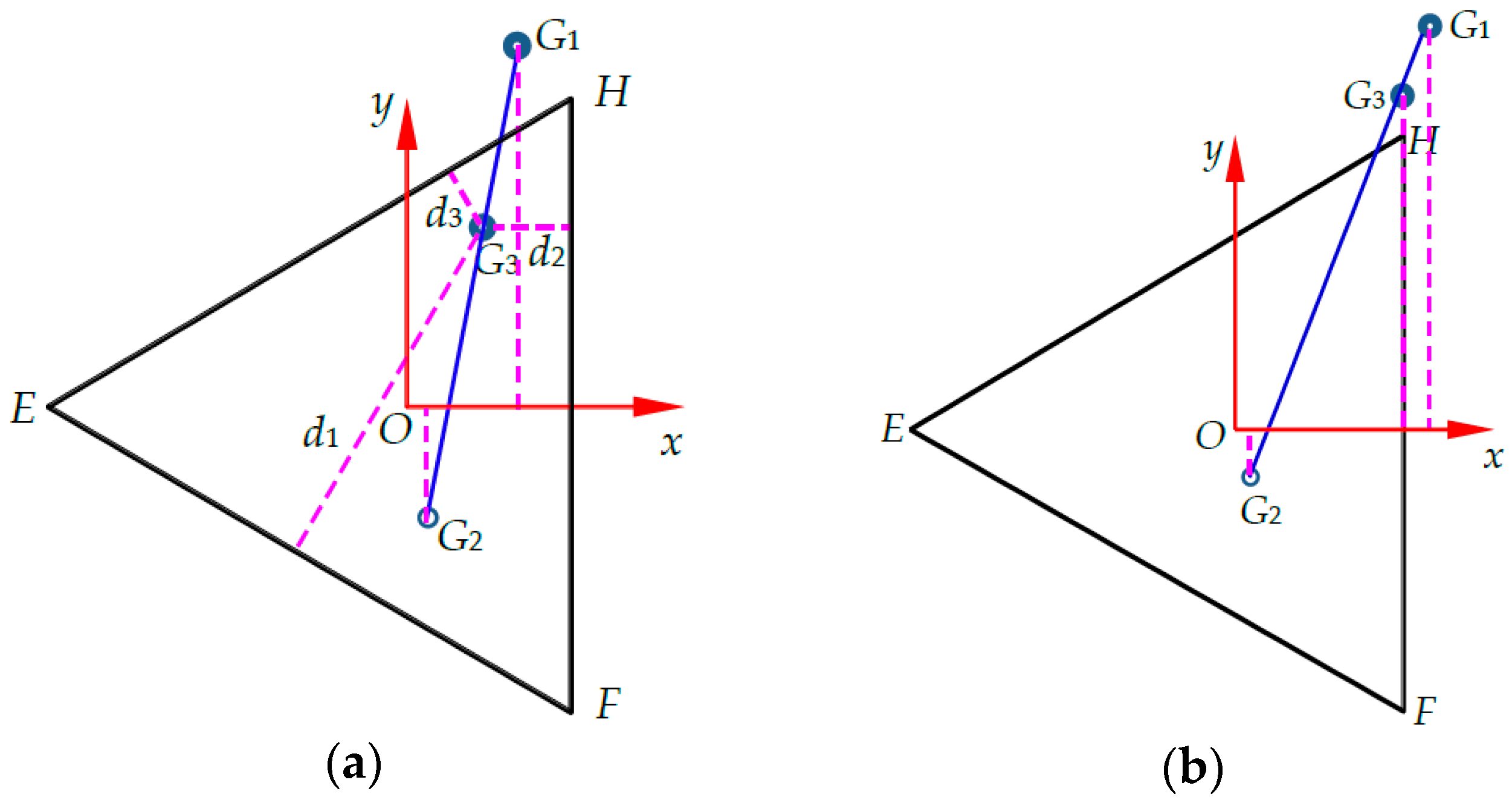
5. Stability of 3-UPU Hexapod Walking Robot
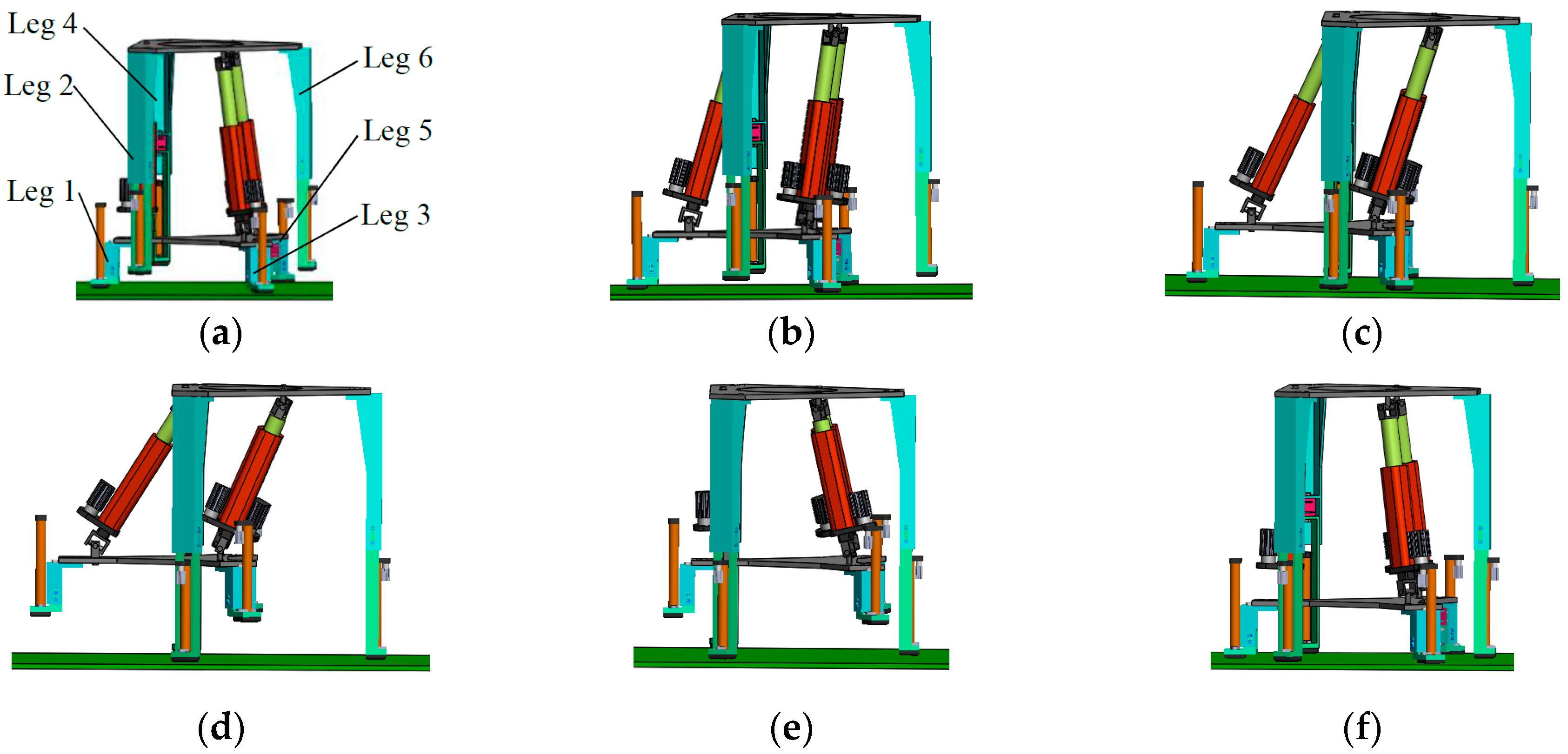
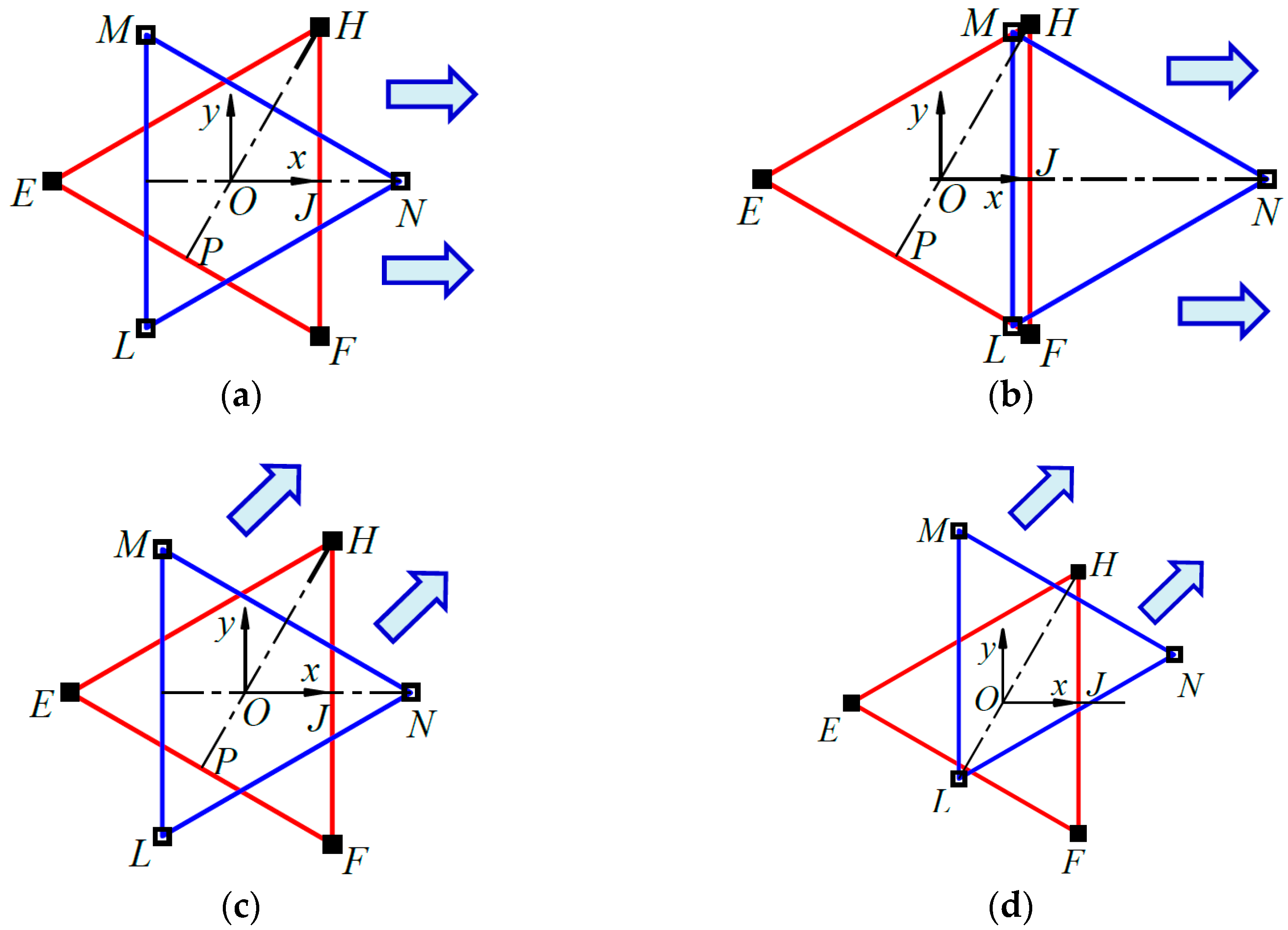
6. Gait Planning of 3-UPU Hexapod Walking Robot
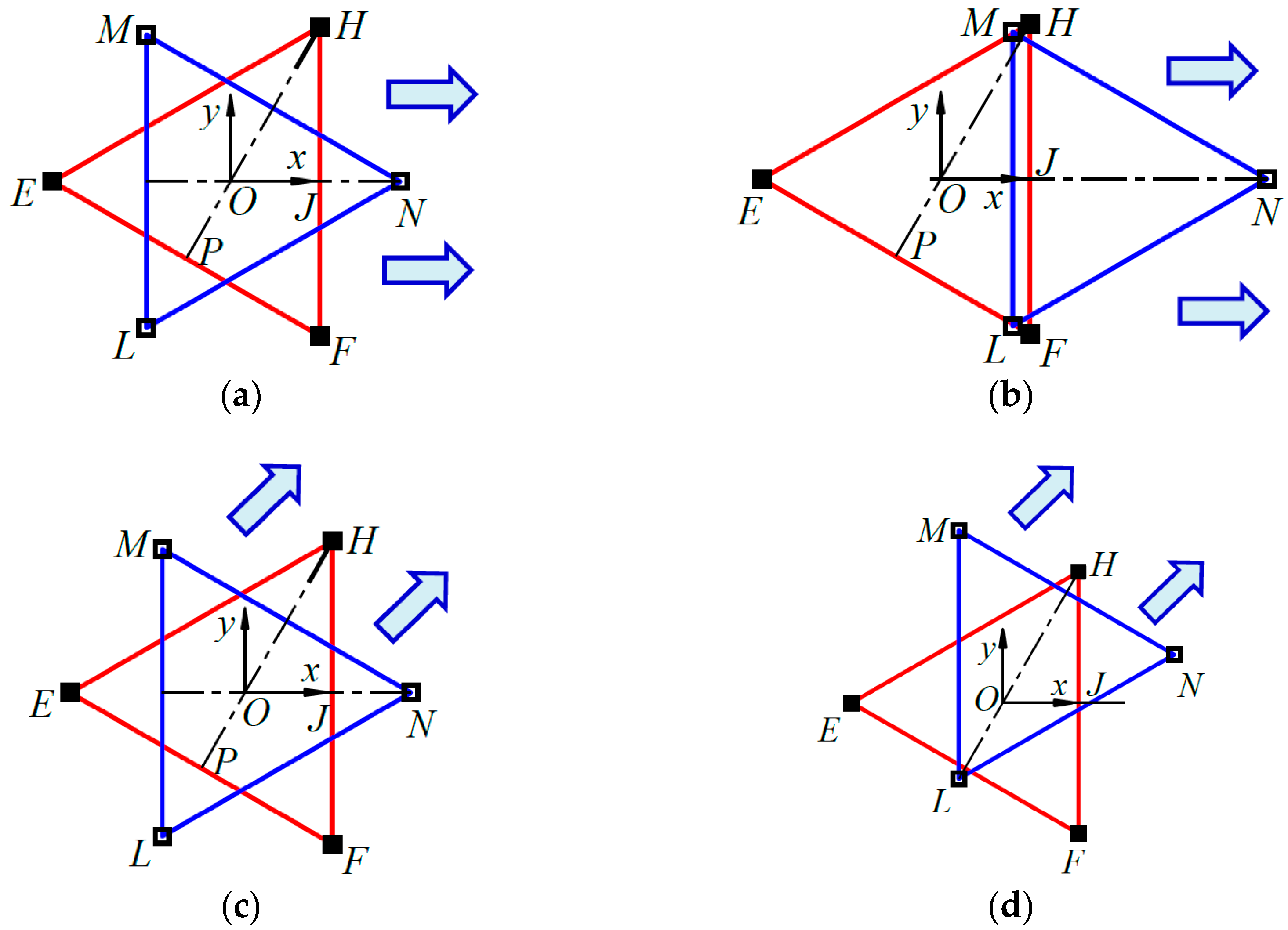
6.1. A New Gait
6.2. Gait Parameters of 3-UPU Hexapod Walking Robot
6.3. Stride Calculation of 3-UPU Hexapod Walking Robot
6.4. Trajectories of the Two Platforms
7. Case Study
8. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tedeschi, F.; Carbone, G. Design issues for hexapod walking robots. Robotics 2014, 3, 181–206. [Google Scholar] [CrossRef]
- Yang, F.; Ding, X.L.; Peng, S.J. Bio-control of a modular design robot-NOROS. In Proceedings of the Third ASME/IFToMM International Conference on Reconfigurable Mechanisms and Robots, Beijing, China, 20–22 July 2015; pp. 891–900. [Google Scholar]
- Peng, S.J.; Ding, X.L.; Yang, F.; Xu, K. Motion planning and implementation for the self-recovery of an overturned multi-legged robot. Robotica 2017, 35, 1107–1120. [Google Scholar] [CrossRef]
- Ma, Z.R.; Guo, W.Z.; Gao, F. Analysis on obstacle negotiation ability of a new wheel-legged robot. Mach. Des. Res. 2015, 31, 6–10, 15. (In Chinese) [Google Scholar]
- Tsai, L.W. Kinematics of a three-DOF platform with three extensible limbs. In Recent Advances in Robot Kinematics; Lenarcic, J., Parenti-Castelli, V., Eds.; Kluwer Academic: London, UK, 1996; pp. 401–410. [Google Scholar]
- Gregorio, R.D. Kinematics of the 3-UPU wrist. Mech. Mach. Theory 2003, 38, 253–263. [Google Scholar] [CrossRef]
- Ji, P.; Wu, H.T. Kinematics analysis of an offset 3-UPU translational parallel robotic manipulator. Robot. Auton. Syst. 2003, 42, 117–123. [Google Scholar] [CrossRef]
- Han, C.; Kim, J.; Kim, J.; Park, F.C. Kinematic sensitivity analysis of the 3-UPU parallel mechanism. Mech. Mach. Theory 2002, 37, 787–798. [Google Scholar] [CrossRef]
- Huang, Z.; Li, S.H.; Zuo, R.G. Feasible instantaneous motions and kinematic characteristics of a special 3-DOF 3-UPU parallel manipulator. Mech. Mach. Theory 2004, 39, 957–970. [Google Scholar] [CrossRef]
- Wu, T.; Zhang, W.X.; Ding, X.L. Design and analysis of a novel parallel metamorphic mechanism. J. Mech. Eng. 2015, 51, 30–37. (In Chinese) [Google Scholar] [CrossRef]
- Staicu, S.; Popa, C. Kinematics of the spatial 3-UPU parallel robot. UPB Sci. Bull. Ser. D 2013, 75, 9–18. [Google Scholar]
- Lu, Y.; Shi, Y.; Hu, B. Kinematic analysis of two novel 3UPU I and 3UPU II PKMs. Robot. Auton. Syst. 2008, 56, 296–305. [Google Scholar] [CrossRef]
- Staicu, S.; Popa, C. Dynamics of the translational 3-UPU parallel manipulator. UPB Sci. Bull. Ser. D 2014, 76, 3–12. [Google Scholar]
- Gregorio, R.D.; Parenti-Castelli, V. Mobility analysis of the 3-UPU parallel mechanism assembled for a pure translational motion. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Atlanta, GA, USA, 19–23 September 1999; pp. 520–525. [Google Scholar]
- Peng, B.B.; Li, Z.M.; Wu, K.; Sun, Y. Kinematic characteristics of 3-UPU parallel manipulator in singularity and its application. Int. J. Adv. Robot. Syst. 2011, 8, 54–64. [Google Scholar]
- Zhang, D.; Wei, B. Interactions and optimizations analysis between stiffness and workspace of 3-UPU robotic mechanism. Meas. Sci. Rev. 2017, 17, 83–92. [Google Scholar] [CrossRef]
- Miao, Z.H.; Yao, Y.A.; Kong, X.W. A rolling 3-UPU parallel mechanism. Front. Mech. Eng. 2013, 8, 340–349. [Google Scholar] [CrossRef]
- Gu, Q.F. Kinematics of 3-UPU parallel leg mechanism used for a quadruped walking robot. In Proceedings of the 14th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES 2015), Guiyang, China, 18–24 August 2015; pp. 188–191. [Google Scholar]
- Wang, M.F.; Ceccarelli, M.; Carbone, G. A feasibility study on the design and walking operation of a biped locomotor via dynamic simulation. Front. Mech. Eng. 2016, 11, 144–158. [Google Scholar] [CrossRef]
- Sugahara, Y.; Endo, T.; Lim, H.; Takanishi, A. Design of a battery-powered multi-purpose bipedal locomotor with parallel mechanism. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; pp. 2658–2663. [Google Scholar]
- Wang, H.B.; Qi, Z.Y.; Hu, Z.W.; Huang, Z. Application of parallel leg mechanisms in quadruped/biped reconfigurable walking robot. J. Mech. Eng. 2009, 45, 24–30. (In Chinese) [Google Scholar] [CrossRef]
- Hirakoso, N.; Terayama, J.; Yoshinaga, N.; Arai, T. A study on optimal formulation for multi-legged gait robot with redundant joint. In Proceedings of the International Symposium on Micro-Nanomechatronics and Human Science, Nagoya, Japan, 3–6 December 2017; pp. 1–6. [Google Scholar]
- Sun, T.; Xiang, X.; Su, W.H.; Wu, H.; Song, Y.M. A transformable wheel-legged mobile robot: Design, analysis and experiment. Robot. Auton. Syst. 2017, 98, 30–41. [Google Scholar] [CrossRef]
- Bai, S.; Low, K.H.; Zielinska, T. Quadruped free gait generation for straight-line and circular trajectories. Adv. Robot. 2000, 13, 513–538. [Google Scholar] [CrossRef]
- Bai, S.; Low, K.H. Terrain evaluation and its application to path planning for walking machines. Adv. Robot. 2001, 15, 729–748. [Google Scholar] [CrossRef]
- Bai, S.; Low, K.H.; Teo, M.Y. Path generation of walking machines in 3D terrain. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 2216–2221. [Google Scholar]
- Gong, D.W.; Wang, P.; Zhao, S.Y.; Duan, Y. Bionic quadruped robot dynamic gait control strategy based on twenty degrees of freedom. IEEE/CAA J. Autom. Sin. 2018, 5, 382–388. [Google Scholar] [CrossRef]
- Li, M.T.; Jiang, Z.Y.; Wang, P.F.; Sun, L.N.; Ge, S.S. Control of a quadruped robot with bionic springy legs in trotting gait. J. Bionic Eng. 2014, 11, 188–198. [Google Scholar] [CrossRef]
- Matsuzawa, T.; Koizumi, A.; Hashimoto, K.; Sun, X.; Hamamoto, S.; Teramachi, T.; Sakai, N.; Kimura, S.; Takanishi, A. Crawling motion and foot trajectory modification control for legged robot on rough terrain. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 6–9 August 2017; pp. 1976–1982. [Google Scholar]
- Winkler, A.W.; Farshidian, F.; Pardo, D.; Neunert, M.; Buchli, J. Fast trajectory optimization for legged robots using vertex-based ZMP constraints. IEEE Robot. Autom. Lett. 2017, 2, 2201–2208. [Google Scholar] [CrossRef]
- Winkler, A.W.; Bellicoso, C.D.; Hutter, M.; Buchli, J. Gait and trajectory optimization for legged systems through phase-based end-effector parameterization. IEEE Robot. Autom. Lett. 2018, 3, 1560–1567. [Google Scholar] [CrossRef]
- Neunert, M.; Farshidian, F.; Winkler, A.W.; Buchli, J. Trajectory optimization through contacts and automatic gait discovery for quadrupeds. IEEE Robot. Autom. Lett. 2017, 2, 1502–1509. [Google Scholar] [CrossRef]
- Zhao, Y.; Chai, X.; Gao, F. Obstacle avoidance and motion planning scheme for a hexapod robot Octopus-III. Robot. Auton. Syst. 2018, 103, 199–212. [Google Scholar] [CrossRef]
- Oliveira, L.F.P.; Rossini, F.L. Modeling, simulation and analysis of locomotion patterns for hexapod robots. IEEE Lat. Am. Trans. 2018, 16, 375–383. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol and Unit |
|---|---|
| Equivalent circumradius of the upper platform | r/mm |
| Equivalent circumradius of the lower platform | R/mm |
| Range of the equivalent link length of limb i | /mm |
| Range of the rotation angle of the Hooke joint | /rad |
| Parameter | Value |
|---|---|
| Equivalent circumradius of the upper platform, r/mm | 125 |
| Equivalent circumradius of the lower platform, R/mm | 160 |
| Range of the equivalent link length of limb i, /mm | |
| Range of the rotation angle of the Hooke joint, /rad |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, R.; Meng, H.; Bai, S.; Yao, Y.; Zhang, J. Stability and Gait Planning of 3-UPU Hexapod Walking Robot. Robotics 2018, 7, 48. https://doi.org/10.3390/robotics7030048
Li R, Meng H, Bai S, Yao Y, Zhang J. Stability and Gait Planning of 3-UPU Hexapod Walking Robot. Robotics. 2018; 7(3):48. https://doi.org/10.3390/robotics7030048
Chicago/Turabian StyleLi, Ruiqin, Hongwei Meng, Shaoping Bai, Yinyin Yao, and Jianwei Zhang. 2018. "Stability and Gait Planning of 3-UPU Hexapod Walking Robot" Robotics 7, no. 3: 48. https://doi.org/10.3390/robotics7030048
APA StyleLi, R., Meng, H., Bai, S., Yao, Y., & Zhang, J. (2018). Stability and Gait Planning of 3-UPU Hexapod Walking Robot. Robotics, 7(3), 48. https://doi.org/10.3390/robotics7030048