A Magnetic Microrobot with in situ Force Sensing Capabilities


Abstract
:1. Introduction
2. Related Work
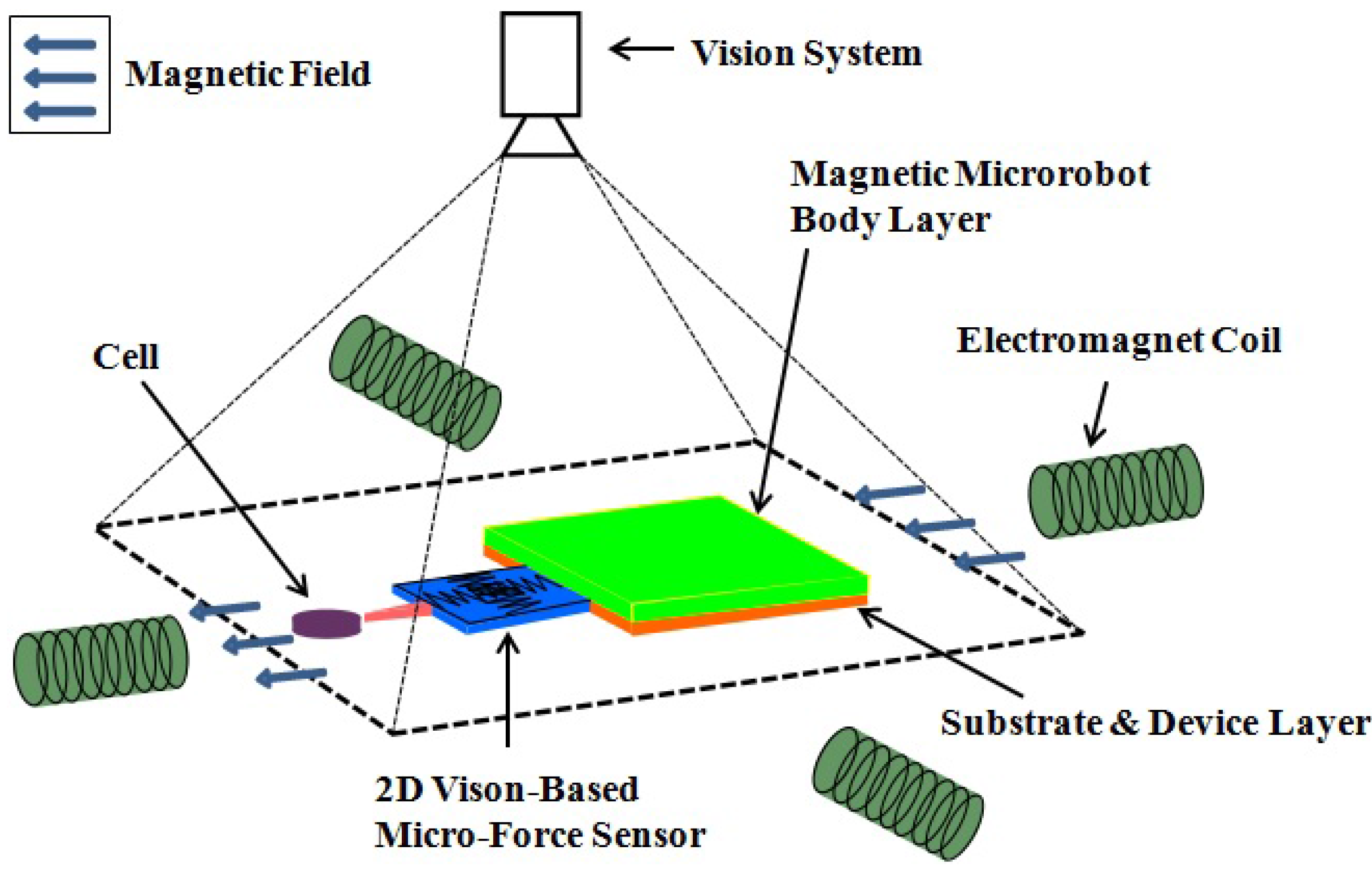
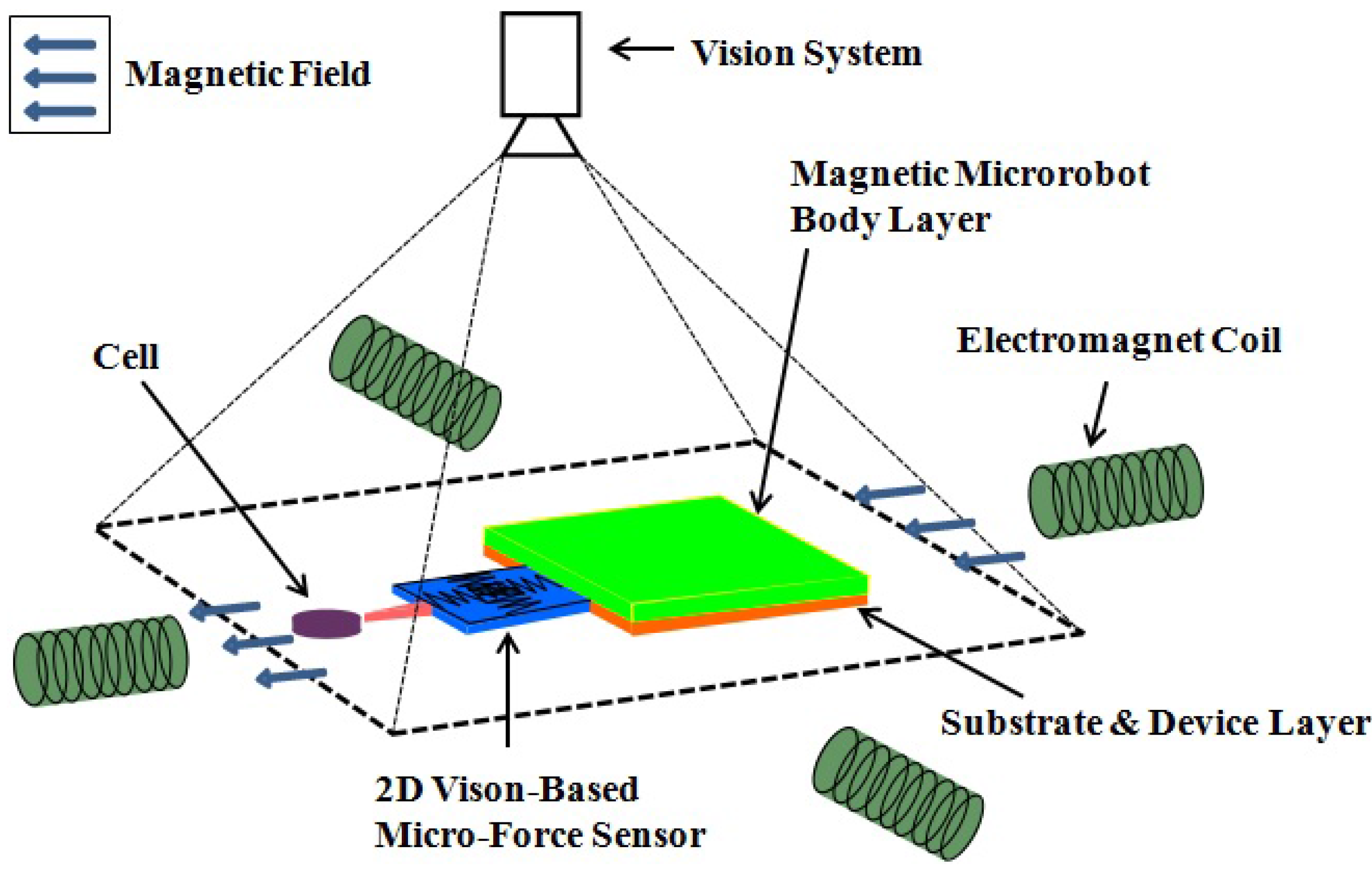
3. Micro-Force Sensing Mobile Microrobot (μFSMM) Design
3.1. Design Specifications

| Camera sensor size (mm) | 7.60 (H) × 6.20 (V) |
| Pixels | 1, 360 (H) × 1, 024 (V) |
| Primary magnification (PMAG) | 0.75 X − 3 X |
| Field of view (FOV, mm) | 10.13 (H) × 8.27 (V) at 0.75 X |
| 2.53 (H) × 2.07 (V) at 3 X | |
| Measurement accuracy (μm) | 14.9 (H) × 16.2 (V) at 0.75 X |
| 3.7 (H) × 4.0 (V) at 3 X |
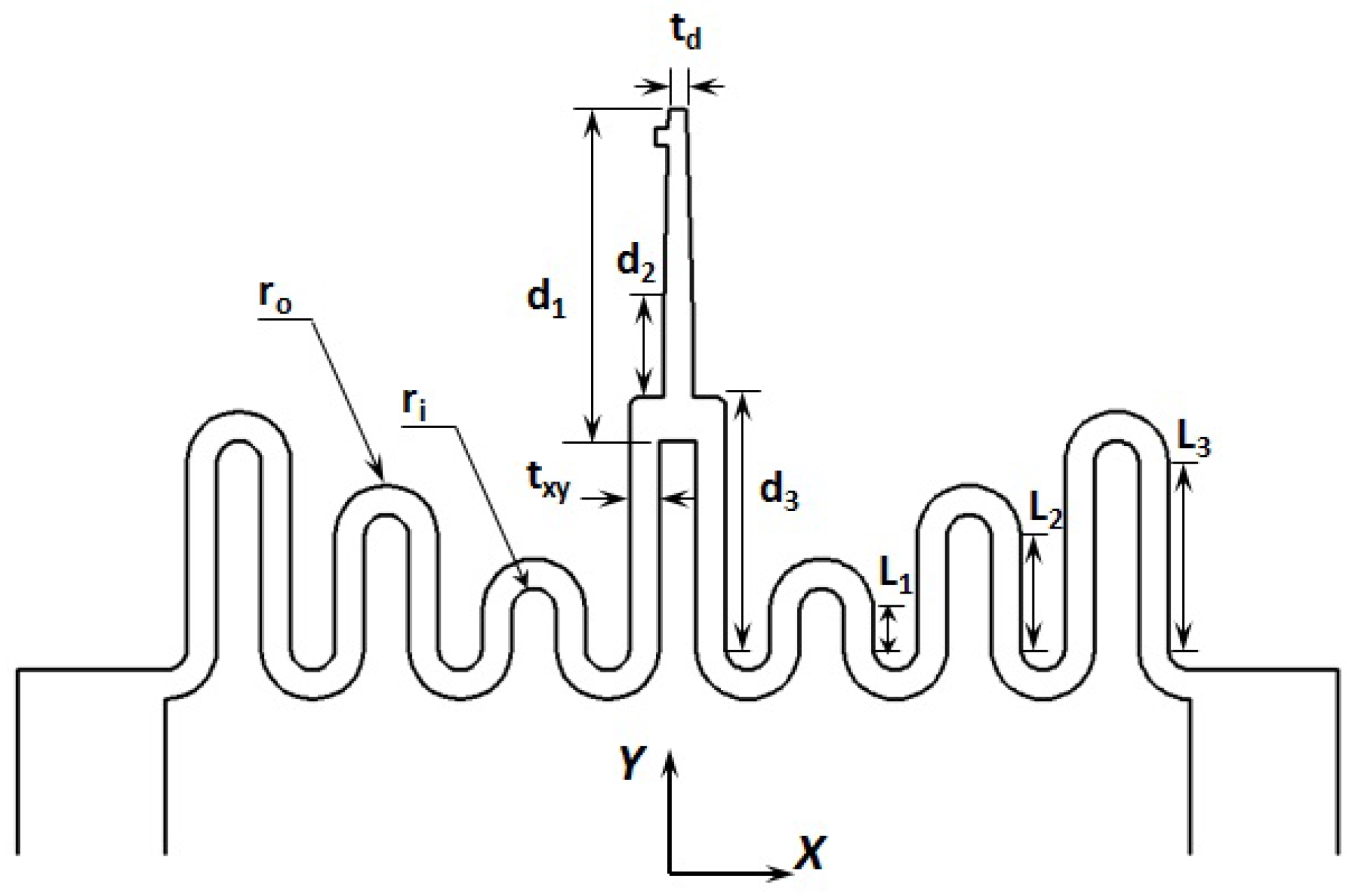
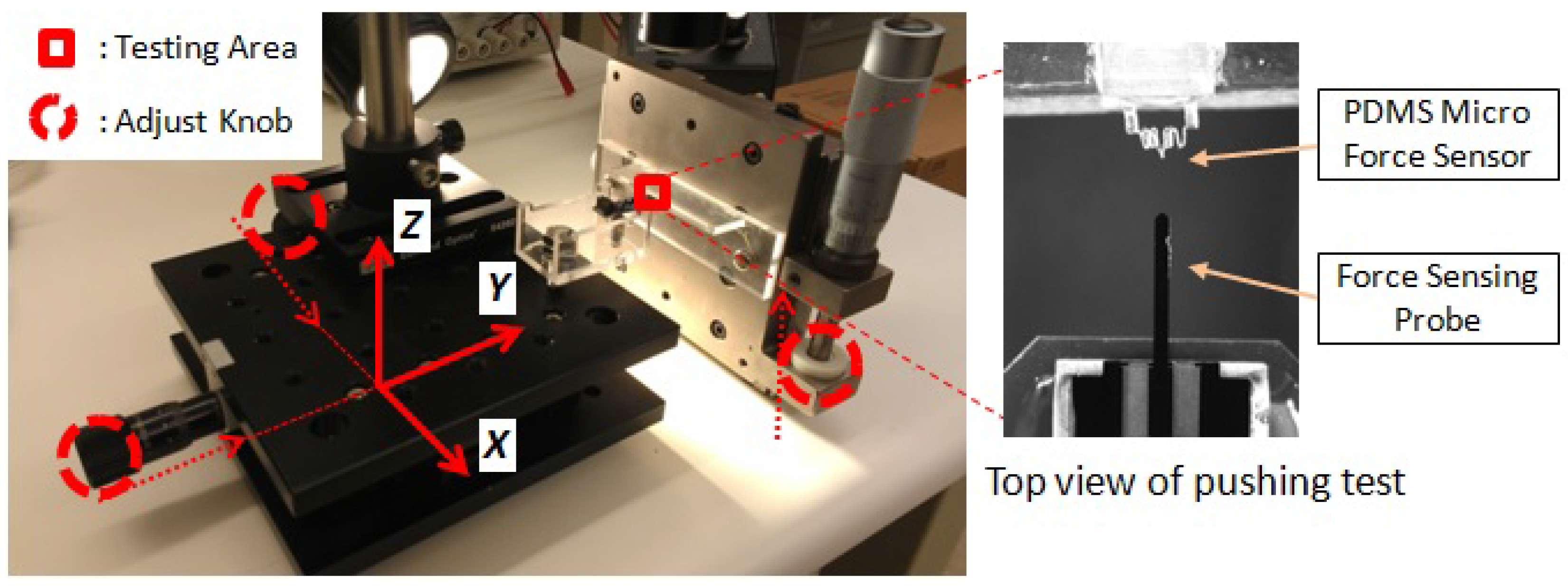
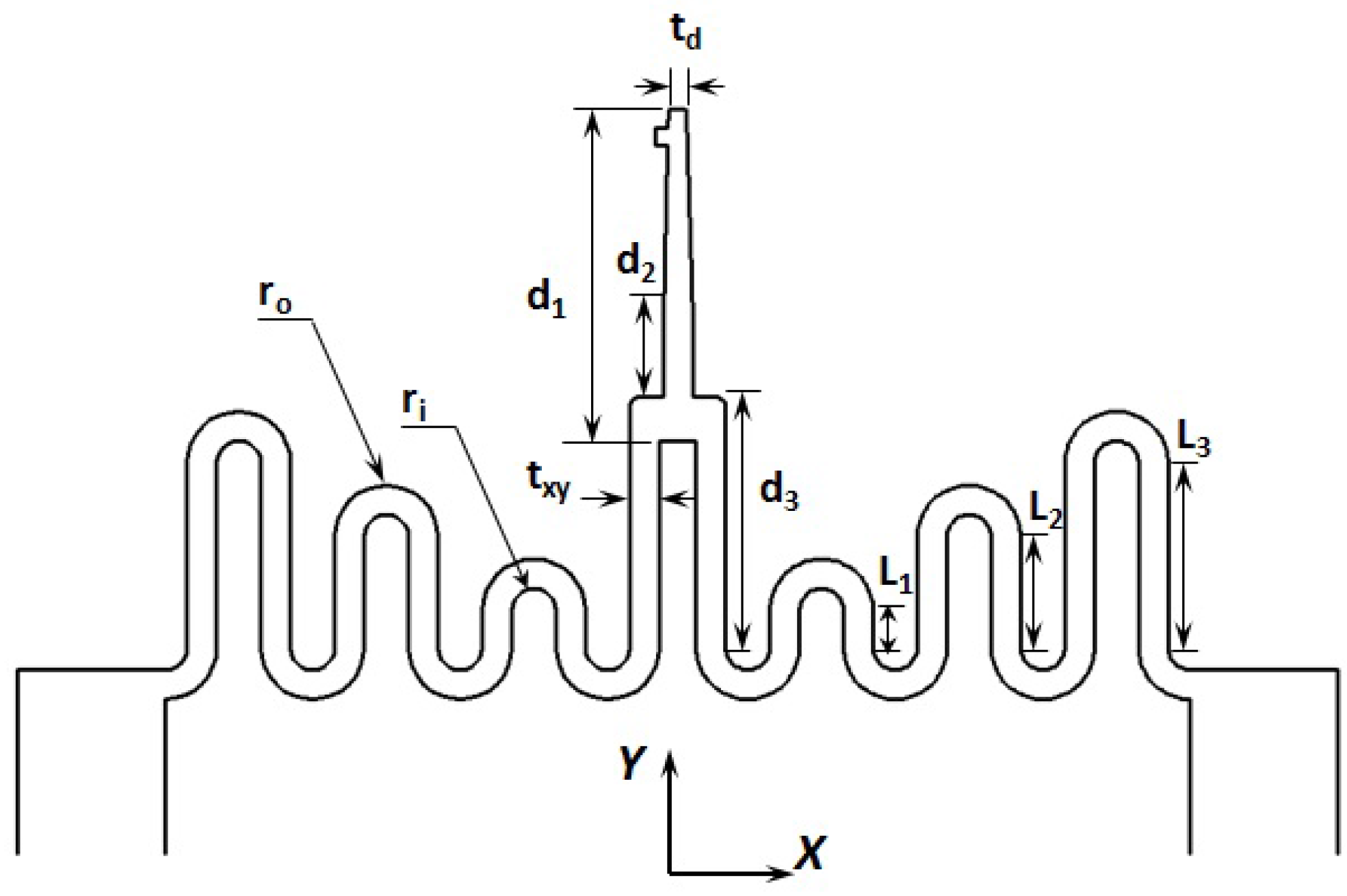
3.2. Micro Force Sensor Design
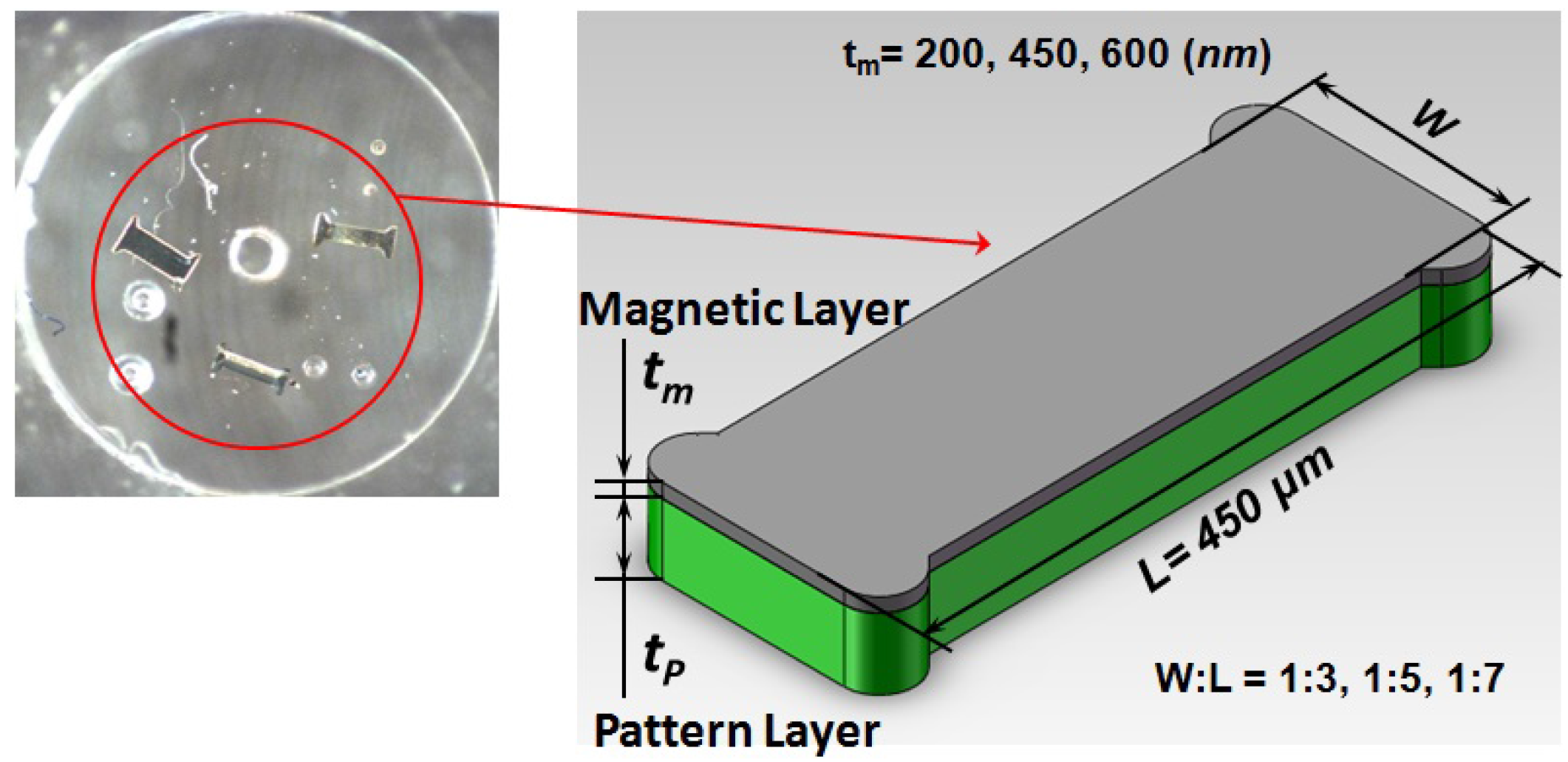
3.3. Mobile Microrobot Design
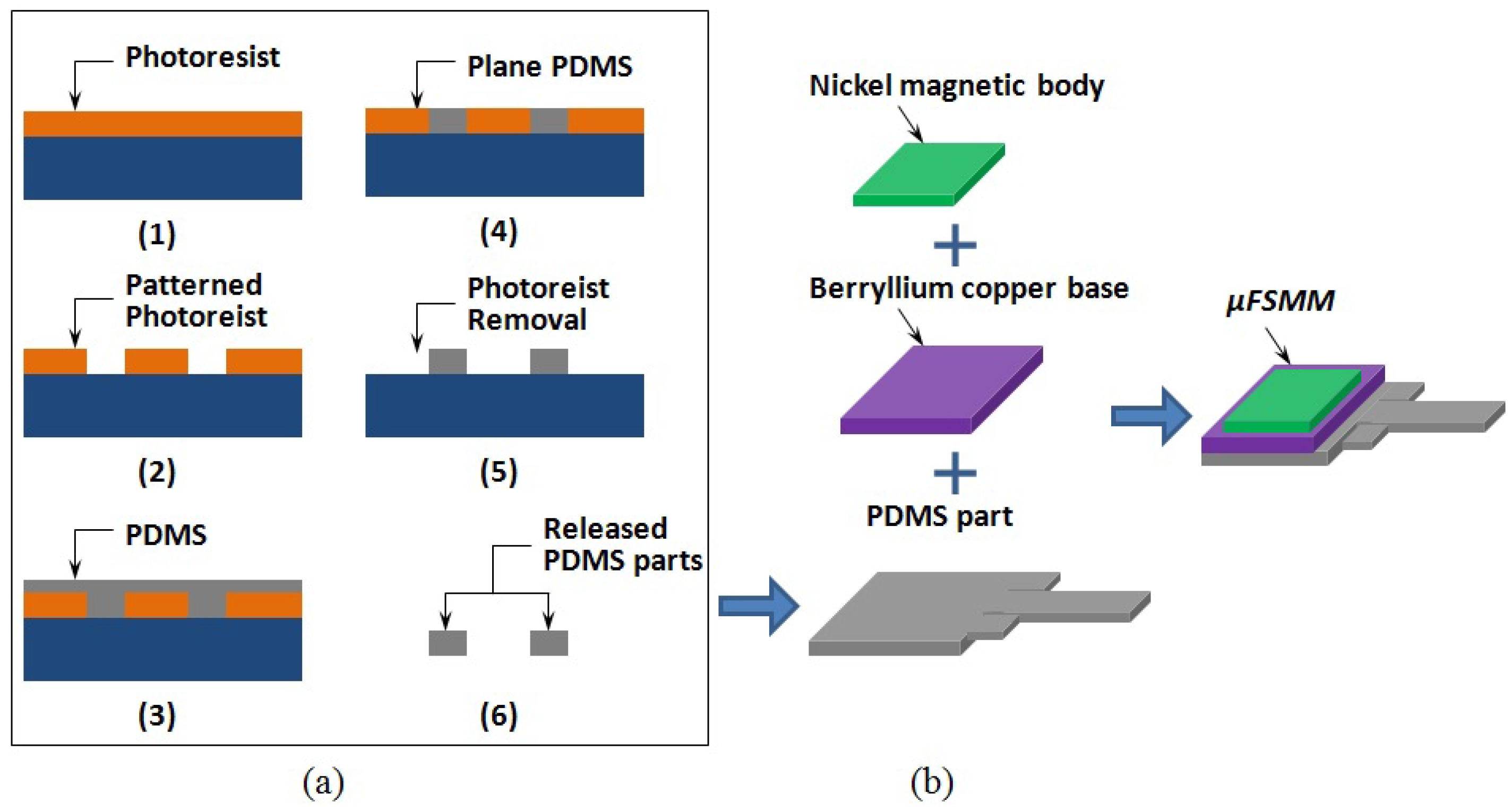
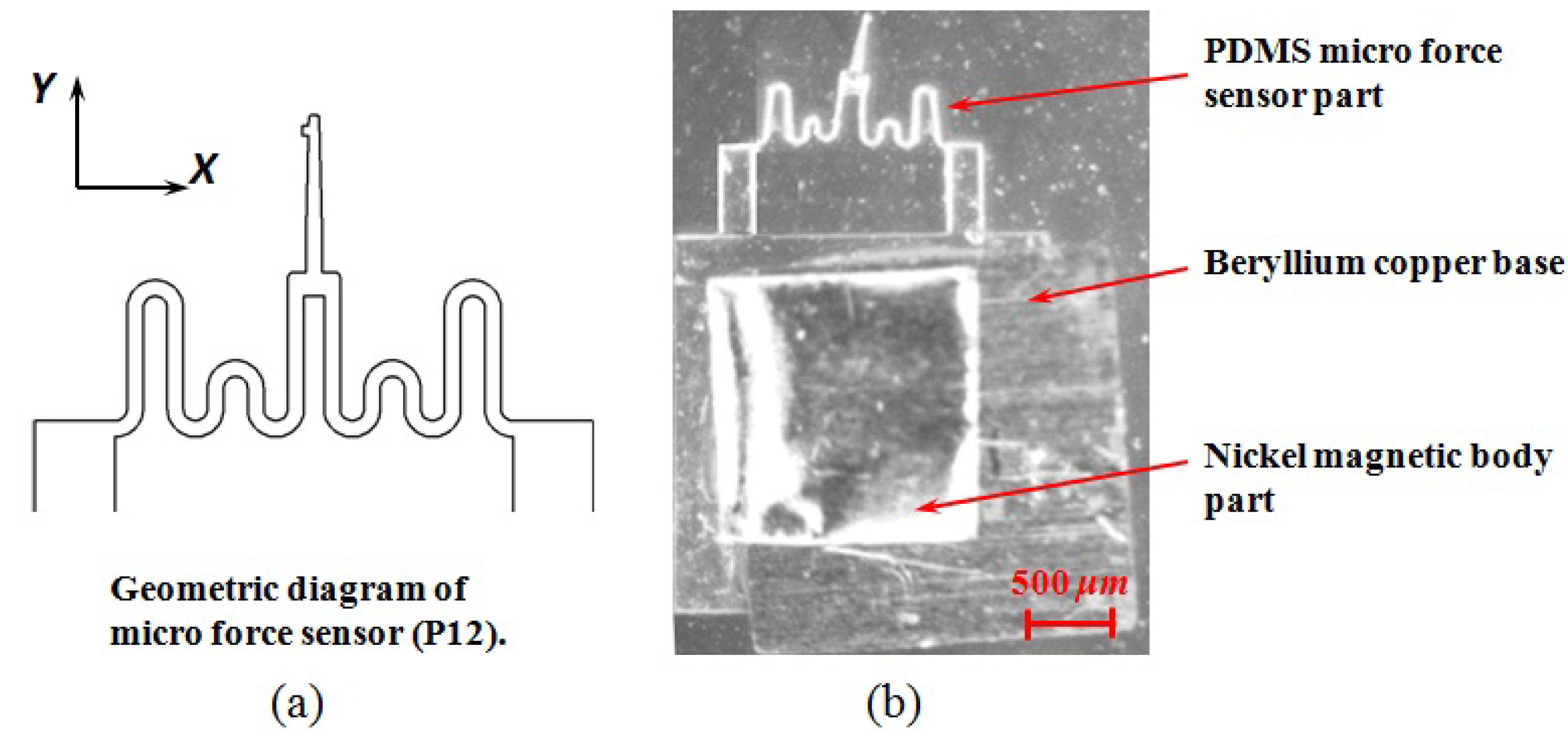
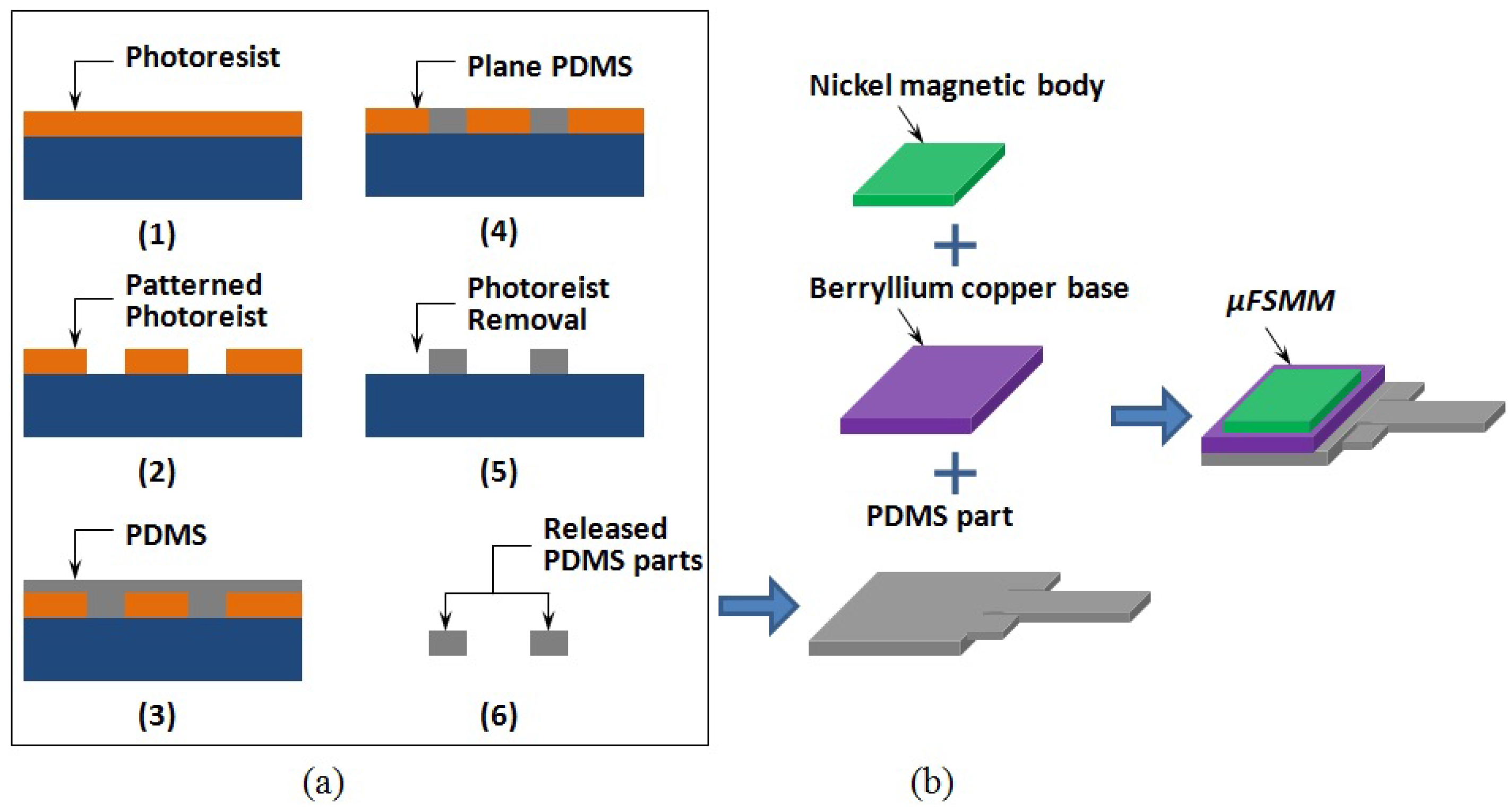
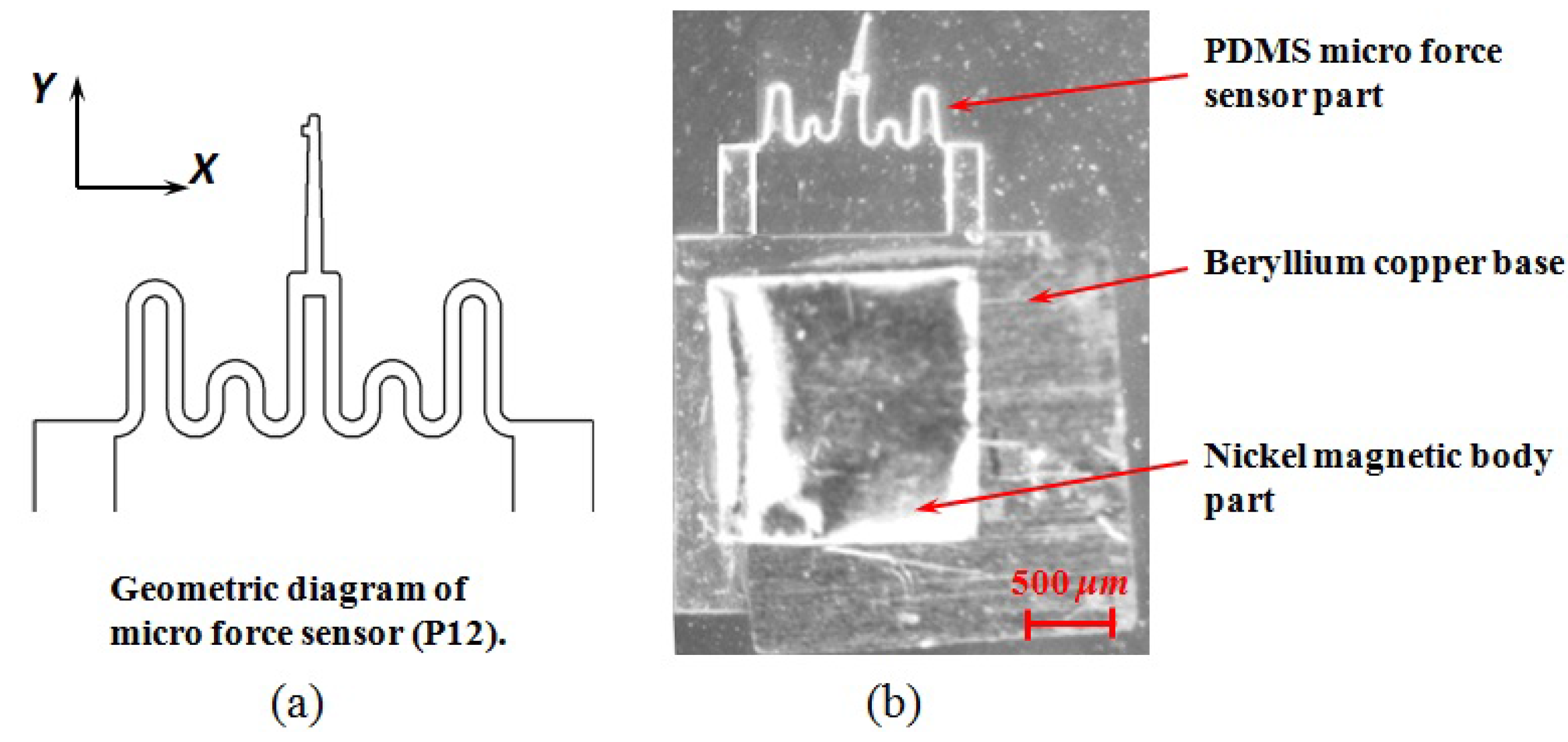
4. Prototype Fabrication
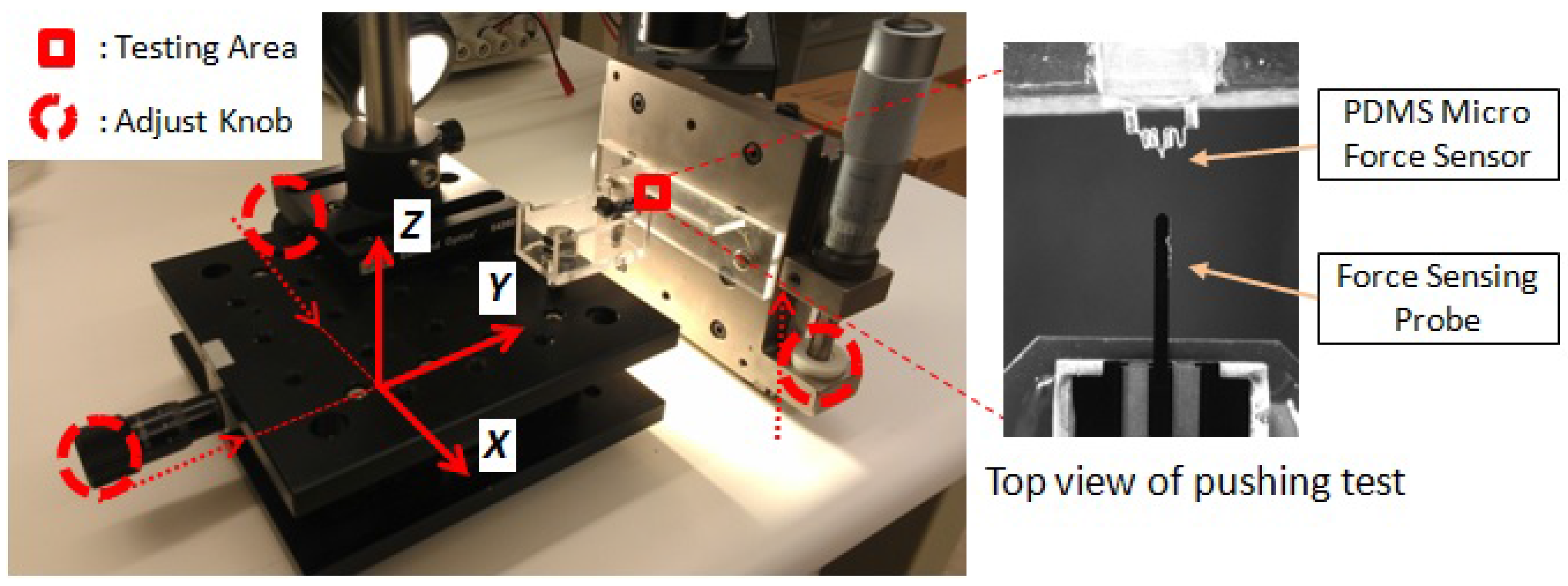
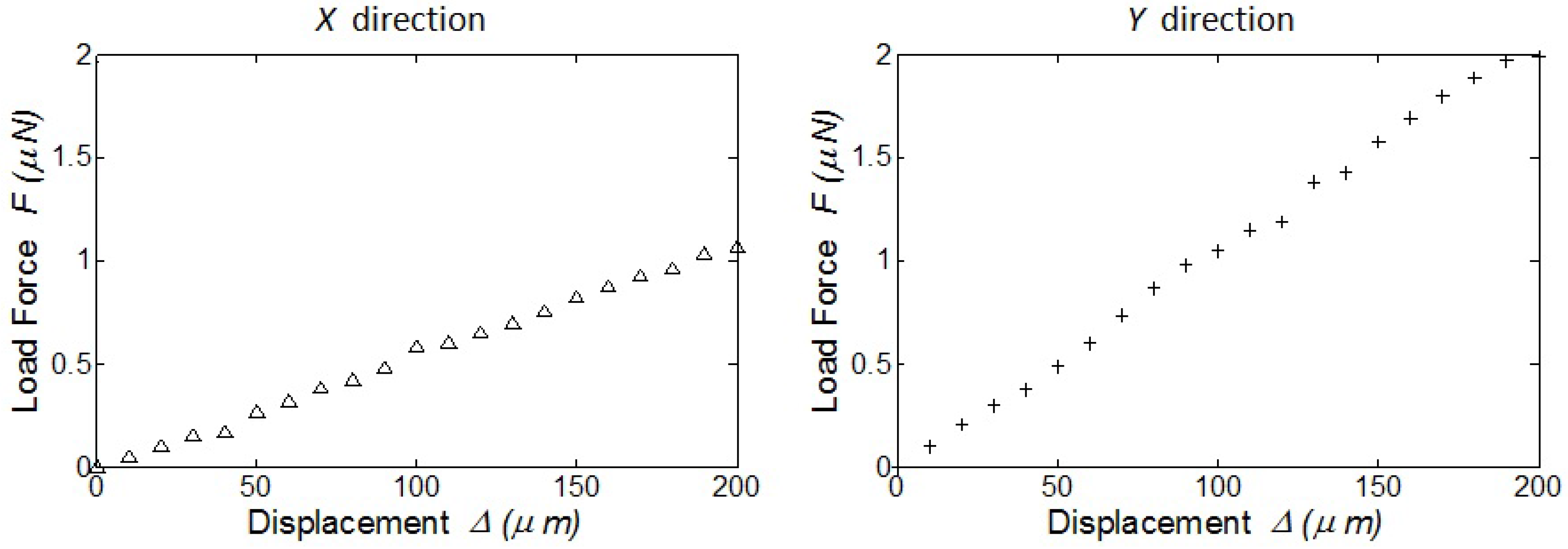
5. Calibration
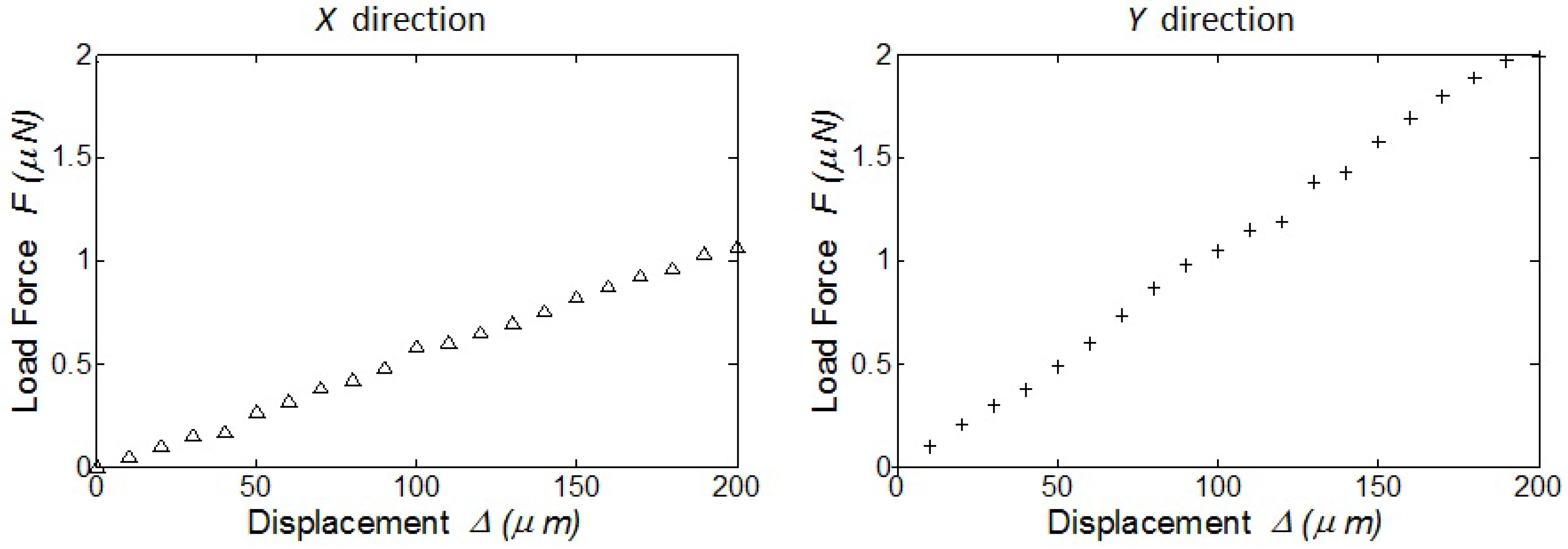
| Kx (N/m) | Ky (N/m) | |
|---|---|---|
| Design criteria | 0.014 | 0.014 |
| FEA-design parameters | 0.0012 | 0.0070 |
| Experimental measurements | 0.0053 | 0.0105 |
6. Characterization
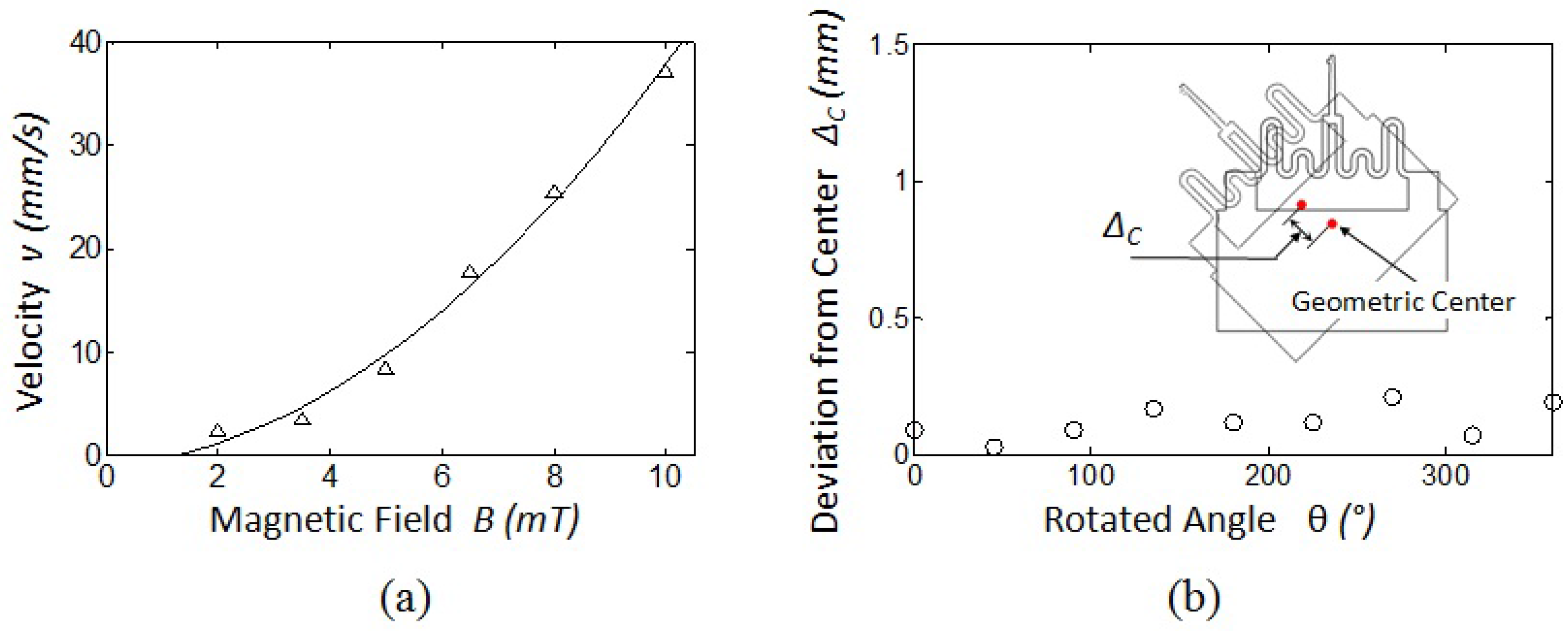
6.1. Mobility


| Velocity | (mm/s) | ||
|---|---|---|---|
| tm (nm) | AR 1:3 | AR 1:5 | AR 1:7 |
| 200 | 1.55 | 1.29 | 1.10 |
| 400 | 4.70 | 4.27 | 3.64 |
| 600 | 10.24 | 9.21 | 6.02 |
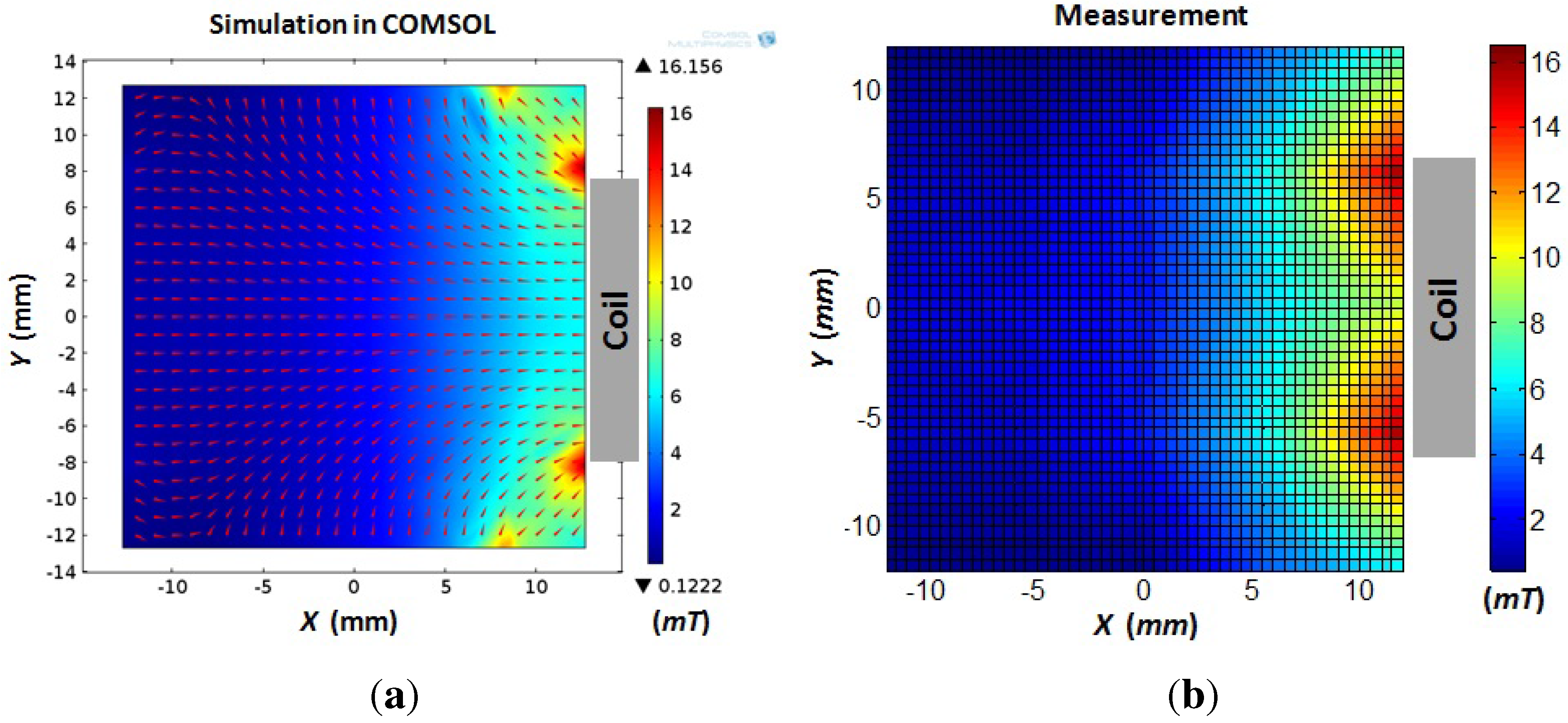
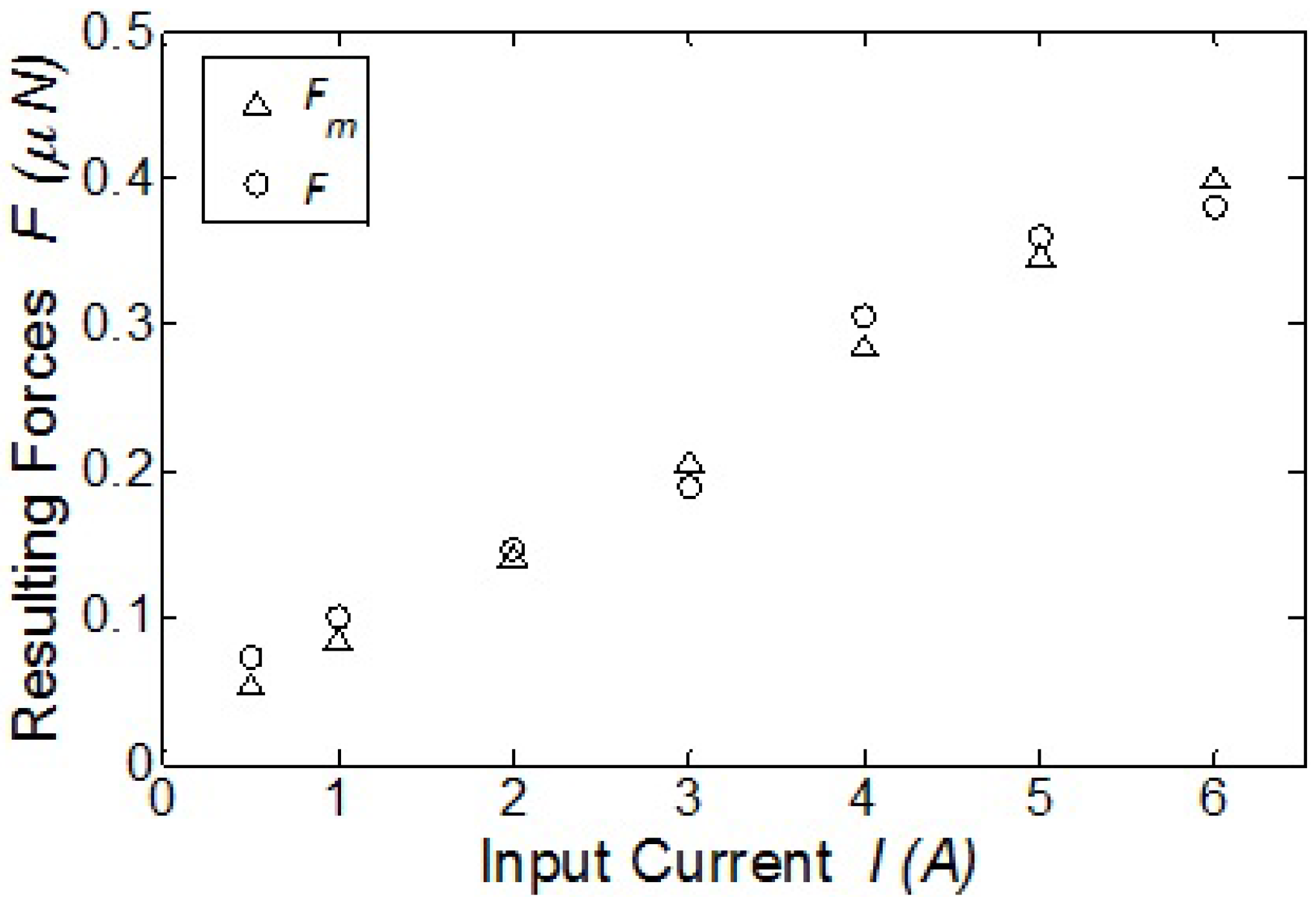
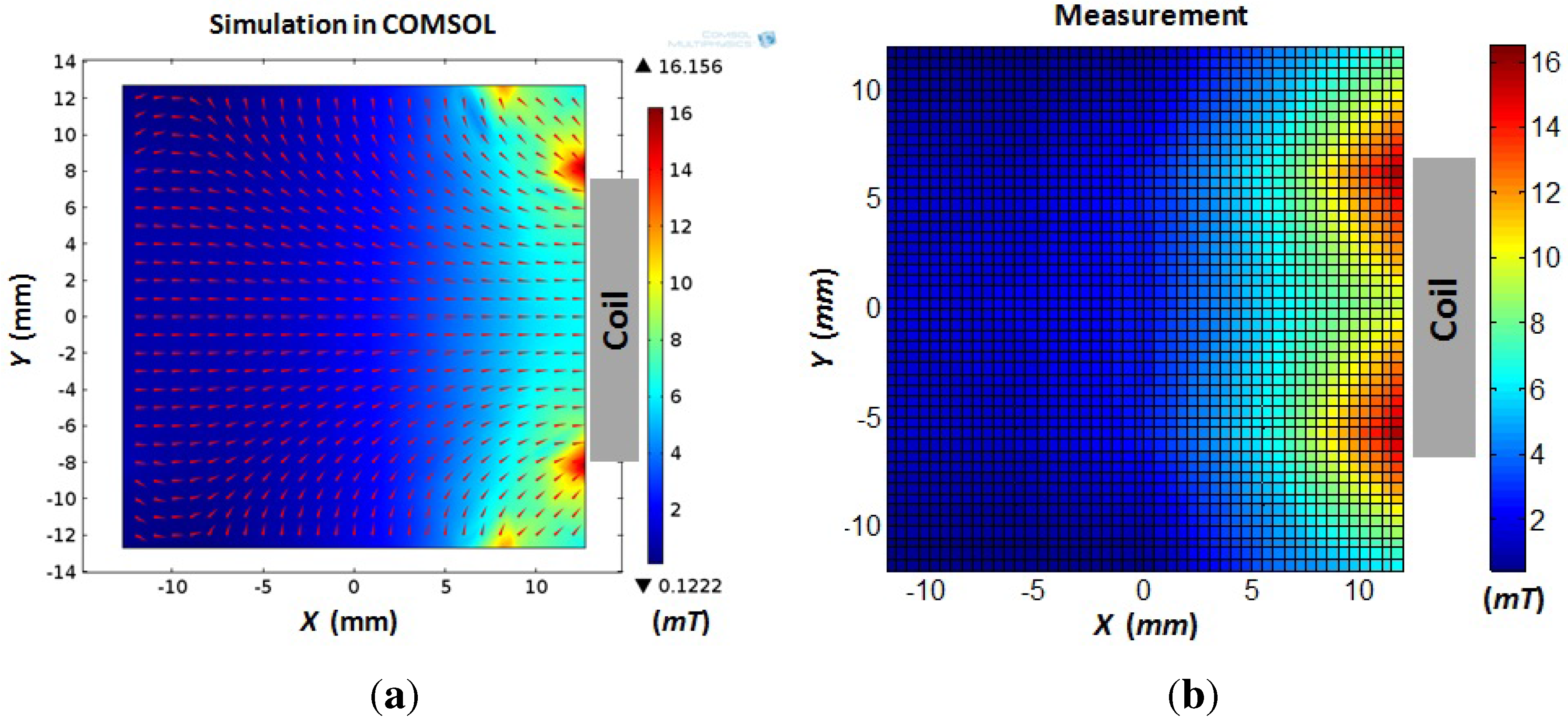
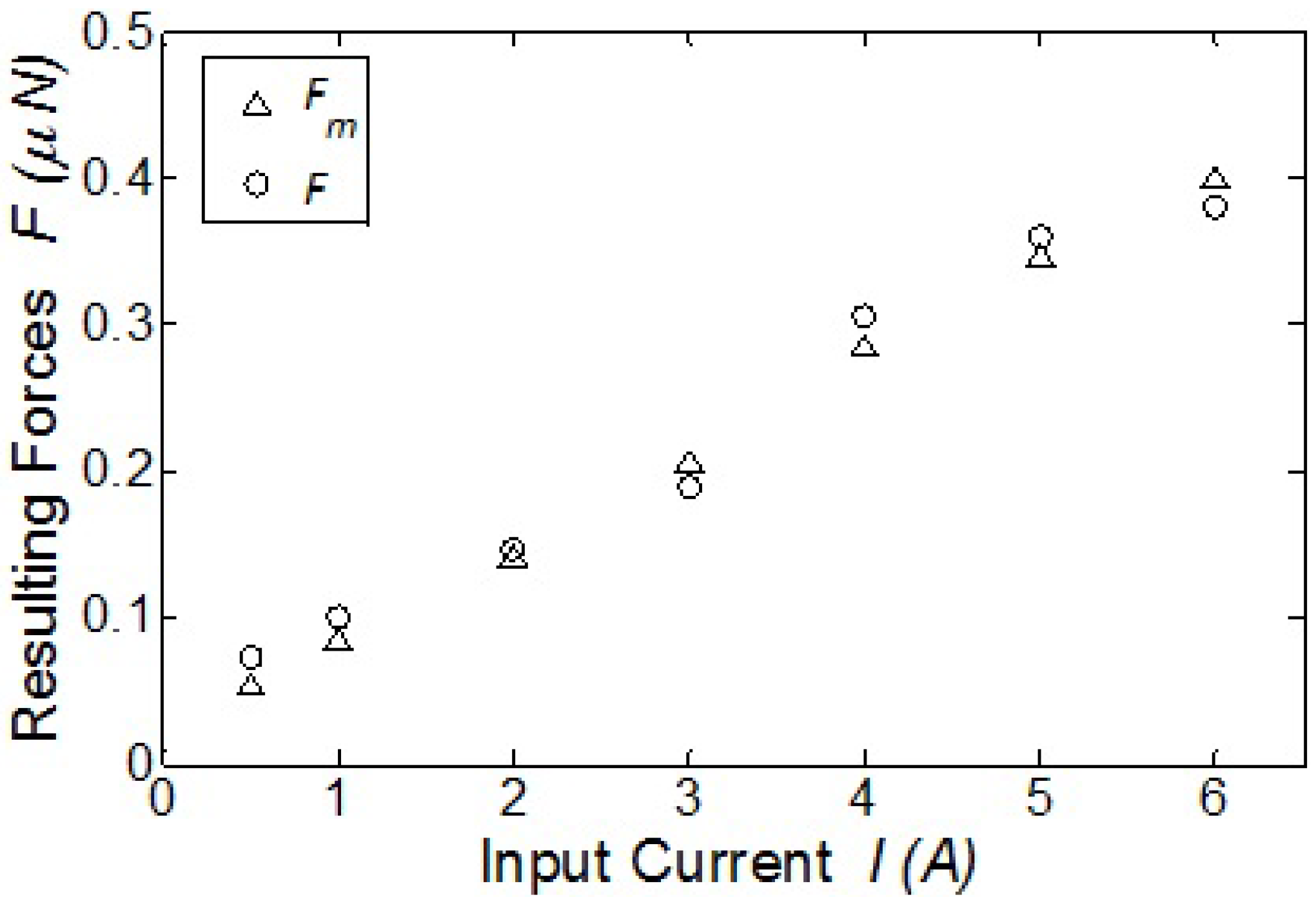
6.2. Calibration of Input Current to Force Relationship
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
7. Conclusions and Future Work
Acknowledgements
Authors Contributions
Conflicts of Interest
References
- Dong, L.; Nelson, B.J. Robotics in the small, part 2: Nanorobotics. IEEE Robot. Autom. Mag. 2007. [Google Scholar] [CrossRef]
- Fatikow, S.; Rembold, U. Microsystem Technology and Microrobotics; Springer: New York, NY, USA, 1997. [Google Scholar]
- Donald, B.R.; Levey, C.G.; McGray, C.D.; Paprotny, I.; Rus, D. An Untethered, Electrostatic, Globally Controllable MEMS Micro-Robot. J. Microelectromech. Syst. 2006, 15, 1–15. [Google Scholar] [CrossRef]
- Sul, O.J.; Falvo, M.R.; Taylor, R.M.; Washburn, S.; Superfine, R. Thermally actuated untethered impact-driven locomotive microdevices. Appl. Phys. Lett. 2006. [Google Scholar] [CrossRef]
- Zhang, L.; Abbott, J.; Dong, L.; Kratochvil, B.E.; Bell, D.; Nelson, B.J. Artificial bacterial flagella: Fabrication and magnetic control. Appl. Phys. Lett. 2009, 94, 064107:1–064107:3. [Google Scholar] [CrossRef]
- Frutiger, D.R.; Vollmers, K.; Kratochvil, B.E.; Nelson, B.J. Small, Fast, and Under Control: Wireless Resonant Magnetic Micro-agents. Int. J. Robot. Res. 2010, 29, 613–636. [Google Scholar] [CrossRef]
- Tung, H.W.; Frutiger, D.R.; Pan�, S.; Nelson, B.J. Polymer-Based Wireless Resonant Magnetic Microrobots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), St. Paul, MN, USA, 14–18 May 2012.
- Pawashe, C.; Floyd, S.; Sitti, M. Modeling and experimental characterization of an untethered magnetic micro-robot. Int. J. Robot. Res. 2009, 28, 1077–1094. [Google Scholar] [CrossRef]
- Jiang, G.L.; Guu, Y.H.; Lu, C.N.; Li, P.K.; Shen, H.M.; Lee, L.S.; Yeh, J.A.; Hou, M.T.-K. Development of rolling magnetic microrobots. J. Micromech. Microeng. 2010, 20, 085042. [Google Scholar] [CrossRef]
- Tung, H.W.; Peyer, K.E.; Sargent, D.F.; Nelson, B.J. Noncontact manipulation using a transversely magnetized rolling robot. Appl. Phys. Lett. 2013, 103, 114101. [Google Scholar] [CrossRef]
- Jing, W.; Pagano, N.; Cappelleri, D.J. A novel micro-scale magnetic tumbling microrobot. J. Micro-Bio Robot. 2013, 8, 1–12. [Google Scholar] [CrossRef]
- Jing, W.; Pagano, N.; Cappelleri, D. A Tumbling Magnetic Microrobot with Flexible Operating Modes. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013.
- Abbott, J.J.; Ergeneman, O.; Kummer, M.; Hirt, A.M.; Nelson, B.J. Modeling Magnetic Torque and Force for Controlled Manipulation of Soft-Magnetic Bodies. IEEE Trans. Robot. 2007, 23, 1247–1252. [Google Scholar] [CrossRef]
- Kummer, M.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. OctoMag: An Electromagnetic System for 5-DOF Wireless Micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Tabatabaei, S.N.; Lapointe, J.; Martel, S. Shrinkable Hydrogel-Based Magnetic Microrobots for Interventions in the Vascular Network. Adv. Robot. 2011, 25, 1049–1067. [Google Scholar] [CrossRef]
- Sun, Y.; Nelson, B. MEMS for cellular force measurements and molecular detection. Int. J. Inf. Acquis. 2004, 1, 23–32. [Google Scholar] [CrossRef]
- Li, X.; Su, D.; Zhang, Z. A novel technique of microforce sensing and loading. Sens. Actuators A: Phys. 2009, 153, 13–23. [Google Scholar] [CrossRef]
- Gnerlich, M.; Perry, S.F.; Tatic-Lucic, S. A submersible piezoresistive MEMS lateral force sensor for a diagnostic biomechanics platform. Sens. Actuators A: Phys. 2012, 188, 111–119. [Google Scholar] [CrossRef]
- Hoover, A.; Fearing, R. Rapidly prototyped orthotweezers for automated microassembly. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Roma, Italy, 10–14 April 2007.
- Perez, R.; Chaillet, N.; et al. Fabrication, modeling and integration of a silicon technology force sensor in a piezoelectric micro-manipulator. Sens. Actuators A: Phys. 2006, 128, 367–375. [Google Scholar] [CrossRef]
- Beyeler, F.; Nelid, A.; Oberti, S.; Bell, D.J.; Sun, Y.; Dual, J.; Nelson, B.J. Monolithically Fabricated Microgripper With Integrated Force Sensor for Manipulating Microobjects and Biological Cells Aligned in an Ultrasonic Field. J. Microelectromech. Syst. 2007, 16, 7–15. [Google Scholar] [CrossRef]
- Beyeler, F.; Muntwyler, S.; Nelson, B.J. A Six-Axis MEMS Force? Torque Sensor With Micro-Newton and Nano-Newtonmeter Resolution. J. Microelectromech. Syst. 2009, 18, 433–441. [Google Scholar] [CrossRef]
- Koch, S.J.; Thayer, G.E.; Corwin, A.D.; de Boer, M.P. Micromachined piconewton force sensor for biophysics investigations. Appl. Phys. Lett. 2006, 89, 173901. [Google Scholar] [CrossRef]
- Wang, X.; Ananthasuresh, G.; Ostrowski, J. Vision-based sensing of forces in elastic objects. Sens. Actuators A: Phys. 2001, 94, 142–156. [Google Scholar] [CrossRef]
- Greminger, M.; Nelson, B. Vision-based force measurement. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 290–298. [Google Scholar] [CrossRef] [PubMed]
- Jeong, K.H.; Keller, C.; Lee, L. Direct force measurements of biomolecular interactions by nanomechanical force gauge. Appl. Phys. Lett. 2005, 86, 193901. [Google Scholar] [CrossRef]
- Ioppolo, T.; Kozhevnikov, M.; Stepaniuk, V.; Otugen, M.V.; Sheverev, V. Micro-optical force sensor concept based on whispering gallery mode resonators. Appl. Opt. 2008, 47, 3009–3014. [Google Scholar] [CrossRef] [PubMed]
- Sasoglu, F.; Bohl, A.; Layton, B. Design and microfabrication of a high-aspectratio pdms microbeam array for parallel nanonewton force measurement and protein printing. J. Micromech. Microeng. 2007, 17, 623–632. [Google Scholar] [CrossRef]
- Liu, X.; Kim, K.; Zhang, Y.; Sun, Y. Nanonewton force sensing and control in microrobotic cell manipulation. Proc. Robot.: Sci. Syst. iv@ 2009, 28, 1065–1076. [Google Scholar]
- Cappelleri, D.J.; Piazza, G.; Kumar, V. A two dimensional vision-based force sensor for microrobotic applications. Sens. Actuators A: Phys. 2011, 171, 340–351. [Google Scholar] [CrossRef]
- Sia, S.K.; Whitesides, G.M. Microfluidic devices fabricated in Poly(dimethylsiloxane) for biological studies. Electrophoresis 2003, 24, 3563–3576. [Google Scholar] [CrossRef] [PubMed]
- Fox, R.W.; McDonald, A.T. Introduction to Fluid Mechanics; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1992. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Jing, W.; Cappelleri, D. A Magnetic Microrobot with in situ Force Sensing Capabilities. Robotics 2014, 3, 106-119. https://doi.org/10.3390/robotics3020106
Jing W, Cappelleri D. A Magnetic Microrobot with in situ Force Sensing Capabilities. Robotics. 2014; 3(2):106-119. https://doi.org/10.3390/robotics3020106
Chicago/Turabian StyleJing, Wuming, and David Cappelleri. 2014. "A Magnetic Microrobot with in situ Force Sensing Capabilities" Robotics 3, no. 2: 106-119. https://doi.org/10.3390/robotics3020106
APA StyleJing, W., & Cappelleri, D. (2014). A Magnetic Microrobot with in situ Force Sensing Capabilities. Robotics, 3(2), 106-119. https://doi.org/10.3390/robotics3020106