The Control Parameter Determination Method for Bidirectional DC-DC Power Converters Interfaced Storage Systems Based on Large Signal Stability Analysis

Abstract
:1. Introduction
2. The DC-MG Topology and the Large Signal Model Construction
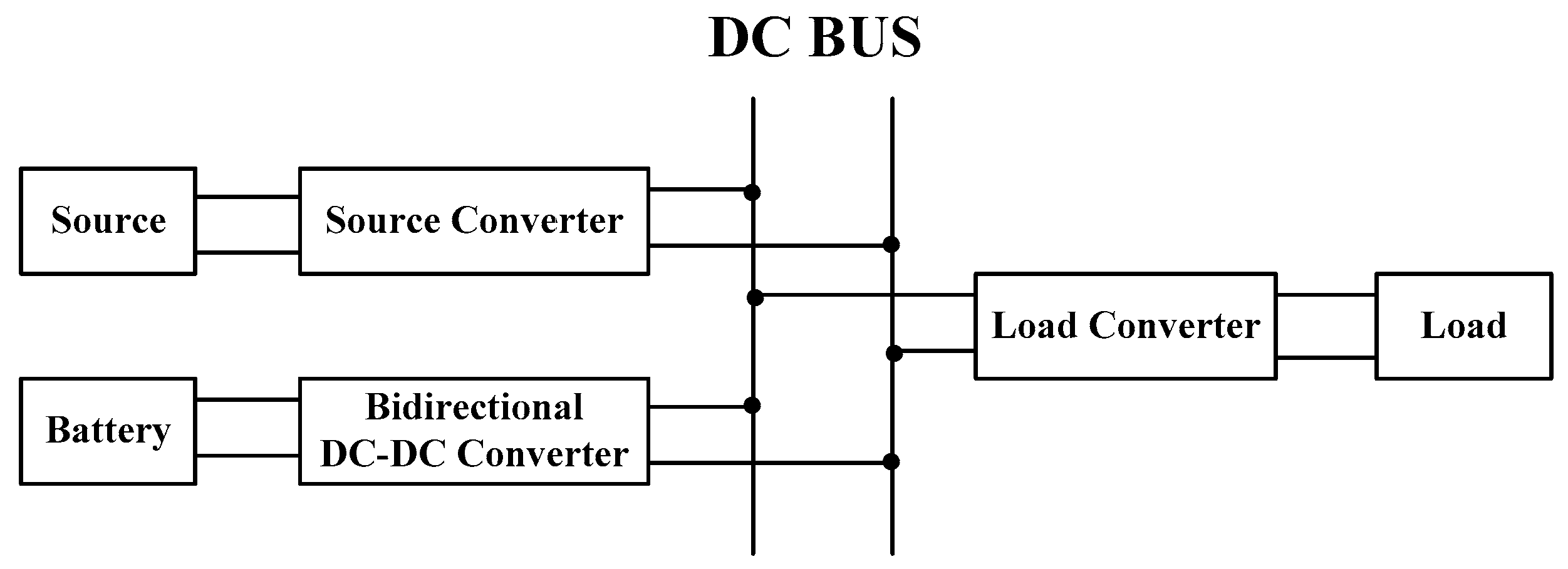
2.1. The DC-MG Topology
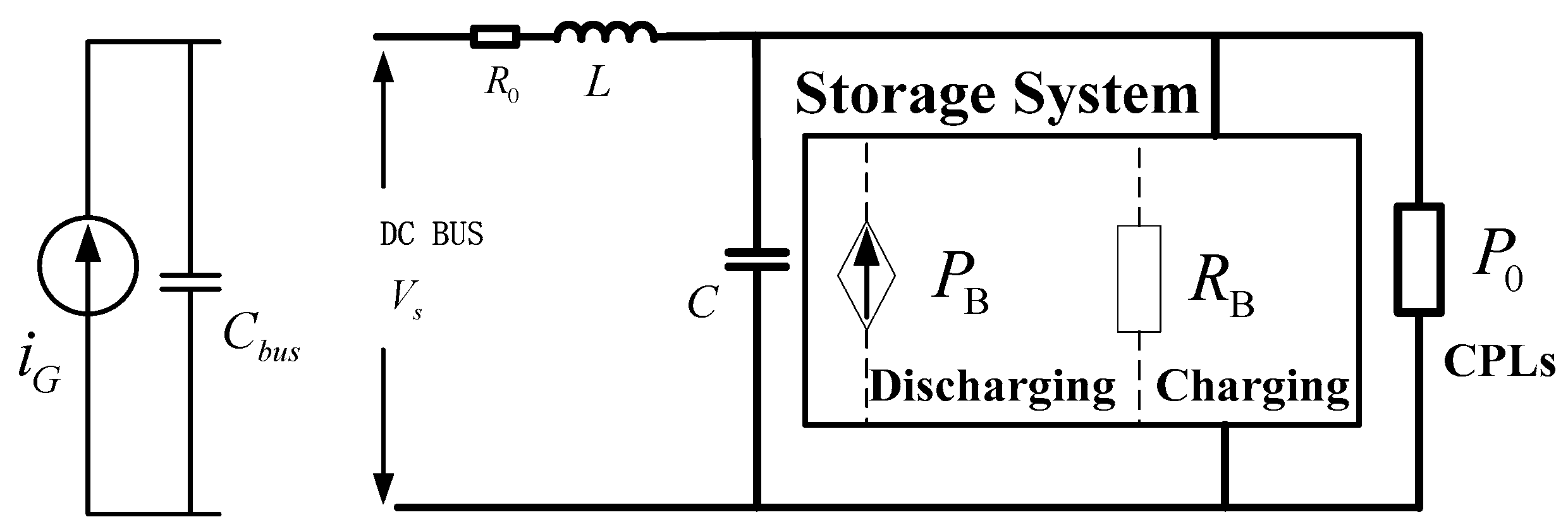
2.2. Large Signal Modeling
3. Large Signal Stability Analysis
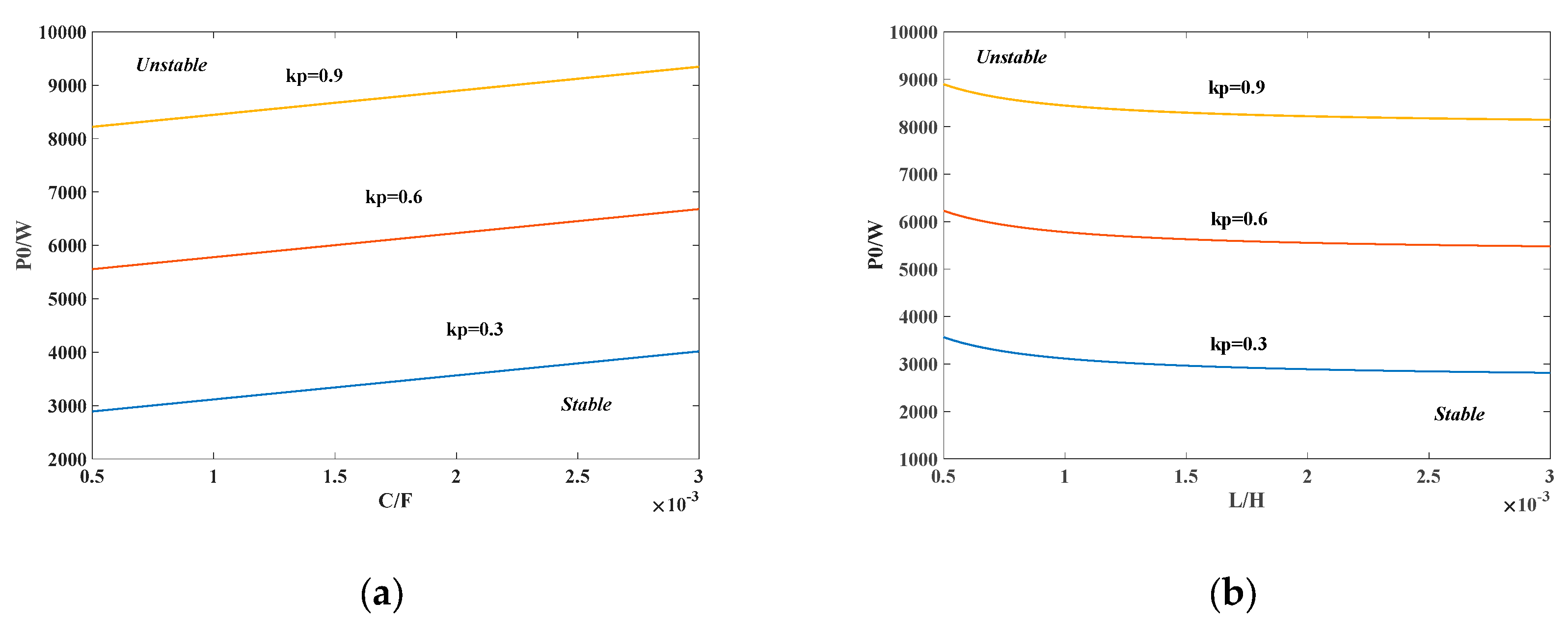
4. System Design and Region of Asymptotic Stability (RAS)
5. The Control Parameter Determination Results and Verification
5.1. Simulation Experimental Topology and Design
5.2. Simulation Verification
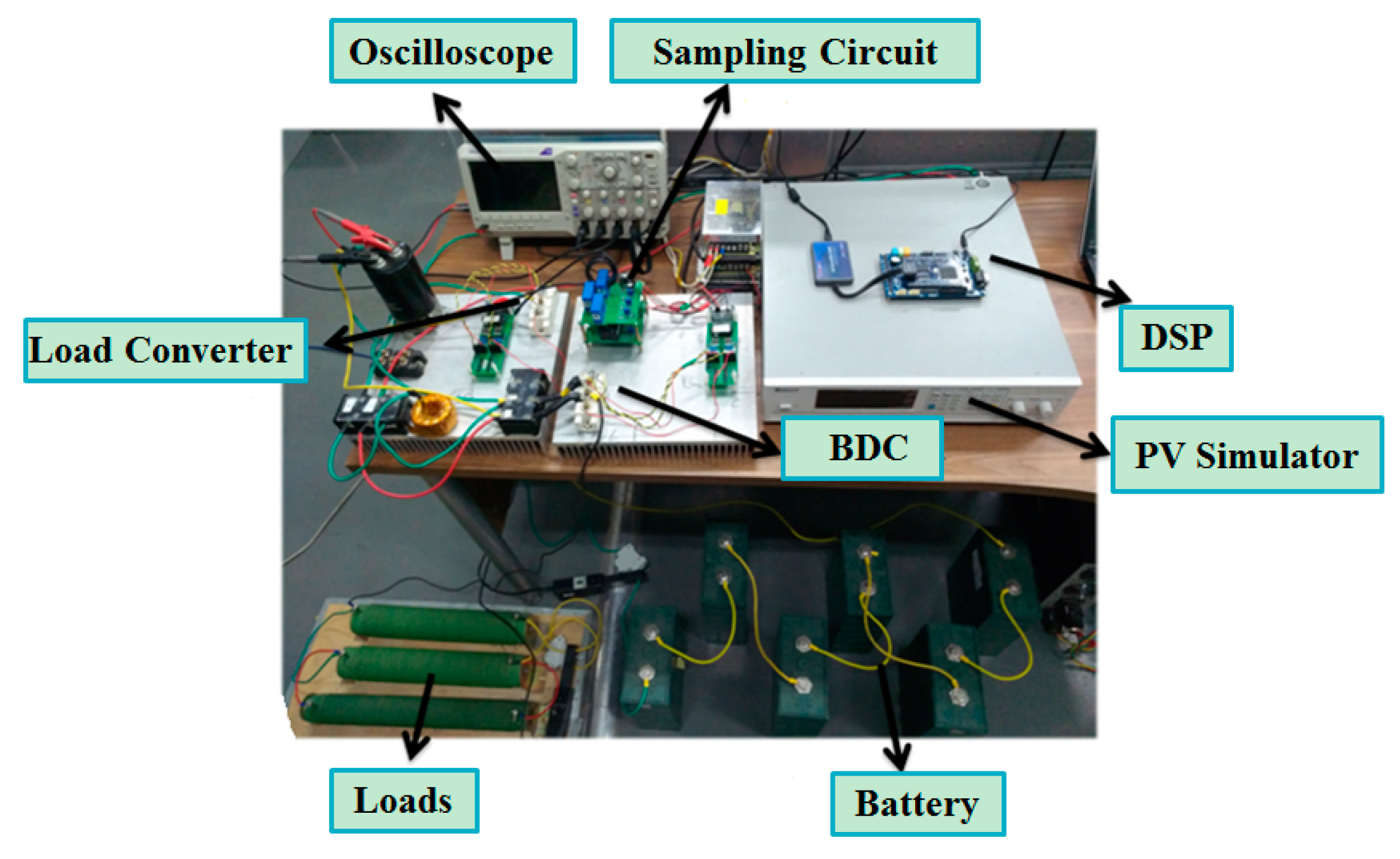
5.3. Experimental Verification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jin, Z.; Savaghebi, M.; Juan, C.; Vasquez, J.C.; Meng, L.; Guerrero, J.M. Maritime DC Microgrids—A Combination of Microgrid Technologies and Maritime Onboard Power System for Future Ships. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016. [Google Scholar]
- Buticchi, G.; Costa, L.; Liserre, M. Improving System Efficiency for the More Electric Aircraft: A Look at dc\/dc Converters for the Avionic Onboard dc Microgrid. IEEE Ind. Electron. Mag. 2017, 11, 26–36. [Google Scholar] [CrossRef]
- Du, W.; Zhang, J.; Zhang, Y. Stability Criterion for Cascaded System with Constant Power Load. IEEE Trans. Power Electron. 2013, 28, 1843–1851. [Google Scholar] [CrossRef]
- Peng, D.; Huang, M. Large-Signal Stability Criterion for Parallel-Connected DC-DC Converters with Current Source Equivalence. IEEE Trans. Circuits Syst. II Express Briefs 2019. [Google Scholar] [CrossRef]
- Kwasinski, A.; Onwuchekwa, C.N. Dynamic Behavior and Stabilization of DC Microgrids with Instantaneous Constant-Power Loads. IEEE Trans. Power Electron. 2011, 26, 822–834. [Google Scholar] [CrossRef]
- Rahimi, A.M.; Emadi, A. Active Damping in DC/DC Power Electronic Converters: A Novel Method to Overcome the Problems of Constant Power Loads. IEEE Trans. Ind. Electron. 2009, 56, 1428–1439. [Google Scholar] [CrossRef]
- Cespedes, M.; Xing, L.; Sun, J. Constant-Power Load System Stabilization by Passive Damping. IEEE Trans. Power Electron. 2011, 26, 1832–2011. [Google Scholar] [CrossRef]
- Yu, X.; Salato, M. An Optimal Minimum-Component DC–DC Converter Input Filter Design and Its Stability Analysis. IEEE Trans. Power Electron. 2014, 29, 829–840. [Google Scholar]
- Rahimi, A.M.; Williamson, G.A.; Emadi, A. Loop-Cancellation Technique: A Novel Nonlinear Feedback to Overcome the Destabilizing Effect of Constant-Power Loads. IEEE Trans. Veh. Technol. 2010, 59, 650–661. [Google Scholar] [CrossRef]
- Zhao, Y.; Qiao, W.; Ha, D. A Sliding-Mode Duty-Ratio Controller for DC/DC Buck Converters with Constant Power Loads. IEEE Trans. Ind. Appl. 2015, 50, 1448–1458. [Google Scholar] [CrossRef]
- Magne, P.; Marx, D.; Nahid-Mobarakeh, B. Large-Signal Stabilization of a DC-Link Supplying a Constant Power Load Using a Virtual Capacitor: Impact on the Domain of Attraction. IEEE Trans. Ind. Appl. 2012, 48, 878–887. [Google Scholar] [CrossRef]
- Anun, M.; Ordonez, M.; Zurbriggen, I.G. Circular Switching Surface Technique: High-Performance Constant Power Load Stabilization for Electric Vehicle Systems. IEEE Trans. Power Electron. 2015, 30, 4560–4572. [Google Scholar] [CrossRef]
- Byrne, R.H.; Nguyen, T.A.; Copp, D.A.; Chalamala, B.R.; Gyuk, I. Energy Management and Optimization Methods for Grid Energy Storage Systems. IEEE Access 2018, 6, 13231–13260. [Google Scholar] [CrossRef]
- Hasan, A.K.; Haque, M.H.; Aziz, S.M. Application of Battery Energy Storage System to Improve Damping of a Simple Power System. In Proceedings of the 2018 10th International Conference on Electrical and Computer Engineering (ICECE), Dhaka, Bangladesh, 20–22 December 2018. [Google Scholar]
- Kondrath, N. Bidirectional DC-DC Converter Topologies and Control Strategies for Interfacing Energy Storage Systems in Microgrids: An Overview. In Proceedings of the 2017 IEEE International Conference on Smart Energy Grid Engineering (SEGE), Oshawa, ON, Canada, 14–17 August 2017. [Google Scholar]
- Zamora, R.; Srivastava, A.K. Energy Management and Control Algorithms for Integration of Energy Storage Within Microgrid. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014. [Google Scholar]
- Jeung, Y.C.; Lee, D.C. Voltage and Current Regulations of Bidirectional Isolated Dual-Active-Bridge DC–DC Converters Based on a Double-Integral Sliding Mode Control. IEEE Trans. Power Electron. 2019, 34, 6937–6946. [Google Scholar] [CrossRef]
- Mardani, M.M.; Khooban, M.H.; Masoudian, A.; Dragičević, T. Model Predictive Control of DC–DC Converters to Mitigate the Effects of Pulsed Power Loads in Naval DC-MGs. IEEE Trans. Ind. Electron. 2019, 66, 5676–5685. [Google Scholar] [CrossRef]
- Bambang, R.T.; Rohman, A.S.; Bambang, R.T.; Rohman, A.S.; Dronkers, C.J.; Ortega, R.; Sasongko, A. Energy Management of Fuel Cell/Battery/Supercapacitor Hybrid Power Sources Using Model Predictive Control. IEEE Trans. Ind. Inform. 2014, 10, 1992–2002. [Google Scholar]
- Iyer, V.M.; Gulur, S.; Bhattacharya, S. Small-Signal Stability Assessment and Active Stabilization of a Bidirectional Battery Charger. IEEE Trans. Ind. Appl. 2019, 55, 563–574. [Google Scholar] [CrossRef]
- Hamidi, S.A.; Nasiri, A. Stability Analysis of a DC-DC Converter for Battery Energy Storage System Feeding CPL. In Proceedings of the 2015 IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 18–22 October 2015. [Google Scholar]
- Belkhayat, M.; Cooley, R.; Witulski, A. Large Signal Stability Criteria for Distributed Systems with Constant Power Loads. In Proceedings of the PESC ′95—Power Electronics Specialist Conference, Atlanta, GA, USA, 18–22 June 1995. [Google Scholar]
- Luo, Z.; Geng, H. Cooperative Control for DC Microgrid with Large Power Disturbance. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition(PEAC), Shenzhen, China, 4–7 November 2018. [Google Scholar]
- Sanchez, S.; Molinas, M. Large Signal Stability Analysis at the Common Coupling Point of a DC Microgrid: A Grid Impedance Estimation Approach Based on a Recursive Method. IEEE Trans. Energy Convers. 2015, 30, 122–131. [Google Scholar] [CrossRef]
- Pakdeeto, J.; Areerak, K.; Areerak, K. Large-signal model of DC micro-grid systems feeding a constant power load. In Proceedings of the 2017 International Electrical Engineering Congress (iEECON), Pattaya, Thailand, 8–10 March 2017. [Google Scholar]
- Kim, H.J.; Kang, S.W.; Seo, G.S. Large-Signal Stability Analysis of DC Power System with Shunt Active Damper. IEEE Trans. Ind. Electron. 2016, 63, 6270–6280. [Google Scholar] [CrossRef]
- Li, Z.; Pei, W.; Ye, H. Large signal stability analysis for DC microgrid under droop control based on mixed potential theory. J. Eng. 2019, 2019, 1189–1193. [Google Scholar] [CrossRef]
- Liu, X.; Bian, Y.; Fan, S. Active stabilization control strategy for storage system paralleled with constant power loads. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017. [Google Scholar]
- Brayton, R.K.; Moser, J.K. A Theory of Nonlinear networks-I. Q. Appl. Math. 1964, 22, 1–33. [Google Scholar] [CrossRef]
- Griffo, A.; Wang, J.; Howe, D. Large Signal Stability Analysis of DC Power Systems with Constant Power Loads. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | #1 | #2 |
|---|---|---|
| kp of the outer DC bus voltage loop (charging) | 0.3 | 0.3 |
| Stability Constraint: kp > 0.0056 | Satisfying | Satisfying |
| kp of the outer DC bus voltage loop (discharging) | 0.1 | 0.6 |
| Stability Constraint: kp > 0.512 | Not Satisfying | Satisfying |
| Parameters | #1 | #2 |
|---|---|---|
| kp of the outer DC bus voltage loop (charging) | 0.3 | 0.3 |
| Stability Constraint: kp > −0.123 | Satisfying | Satisfying |
| kp of the outer DC bus voltage loop (discharging) | 0.005 | 2 |
| Stability Constraint: kp > 0.166 | Not Satisfying | Satisfying |
| Parameters | #1 | #2 |
|---|---|---|
| kp of the outer DC bus voltage loop(charging) | 0.3 | 0.3 |
| Stability Constraint: kp > −0.123 | Satisfying | Satisfying |
| kp of the outer DC bus voltage loop(discharging) | 0.005 | 2 |
| Stability Constraint: kp > 0.53 | Not Satisfying | Satisfying |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Bian, Y.; Cao, M.; Zhang, Z.; Meng, Q. The Control Parameter Determination Method for Bidirectional DC-DC Power Converters Interfaced Storage Systems Based on Large Signal Stability Analysis. Electronics 2019, 8, 1018. https://doi.org/10.3390/electronics8091018
Liu X, Bian Y, Cao M, Zhang Z, Meng Q. The Control Parameter Determination Method for Bidirectional DC-DC Power Converters Interfaced Storage Systems Based on Large Signal Stability Analysis. Electronics. 2019; 8(9):1018. https://doi.org/10.3390/electronics8091018
Chicago/Turabian StyleLiu, Xinbo, Yawei Bian, Meigen Cao, Zhou Zhang, and Qinghai Meng. 2019. "The Control Parameter Determination Method for Bidirectional DC-DC Power Converters Interfaced Storage Systems Based on Large Signal Stability Analysis" Electronics 8, no. 9: 1018. https://doi.org/10.3390/electronics8091018