Stereo Matching in Address-Event-Representation (AER) Bio-Inspired Binocular Systems in a Field-Programmable Gate Array (FPGA)

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
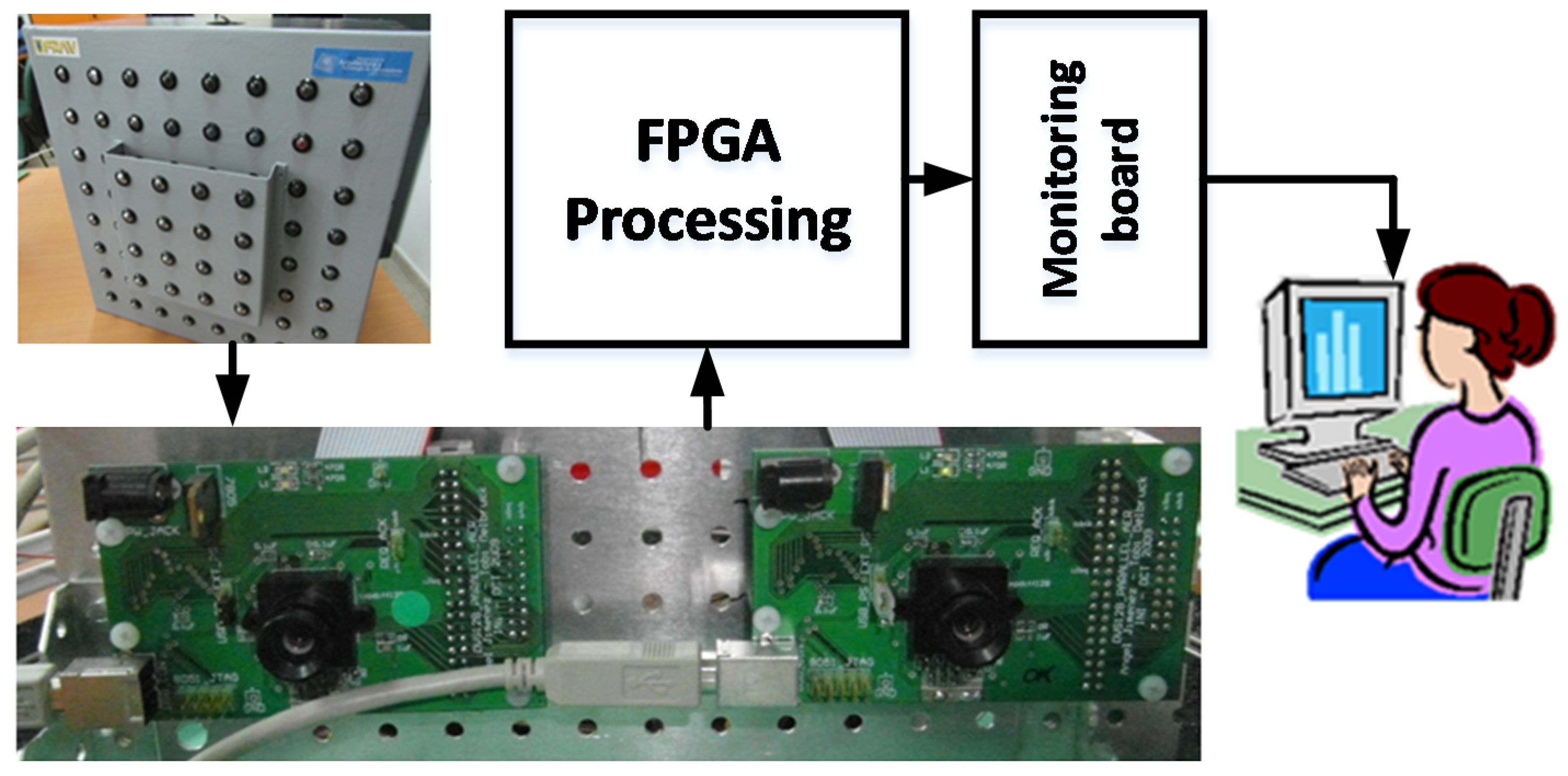
2.1. Hardware
2.1.1. Address-Event-Representation (AER) Retina
- DVS128: A camera that has a single high-speed USB 2.0, to send the spiking information, and a plastic case with integrated tripod mount and camera sync connector pins. The DVS128 is intended for jAER software.
- DVS128_PAER: A bare-board camera that offers parallel AER connectors for direct interfacing of the DVS sensor to other AER systems, supporting two connector standards (Rome and CAVIAR). It has also a USB 2.0 port. Our research group worked on European Project CAVIAR [10] and the sensor board was designed by our group.
- eDVS128: An embedded camera that integrates the Tmpdiff128 sensor chip with a 32-bit microcontroller.
2.1.2. AER Monitoring Board
2.1.3. Virtex-5 FPGA
2.1.4. Calibration Matrix
2.2. Matching Process
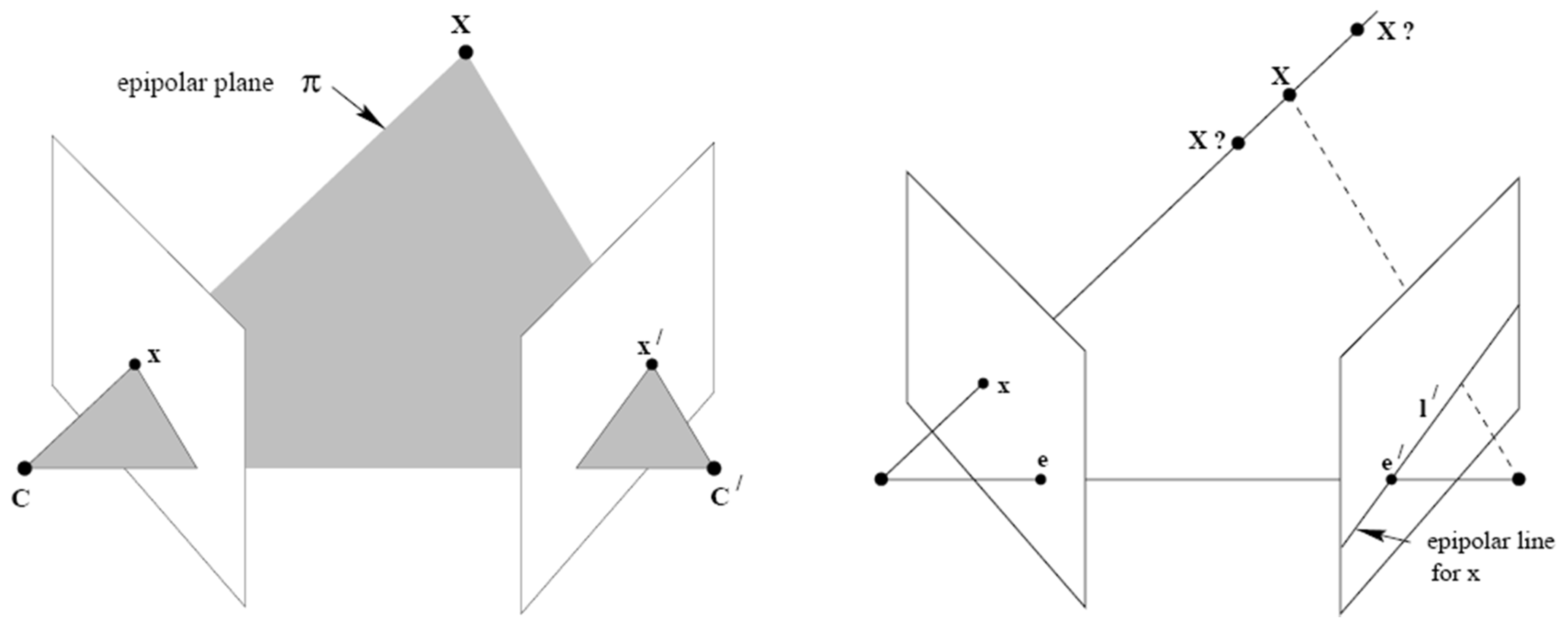
2.2.1. Epipolar Restriction
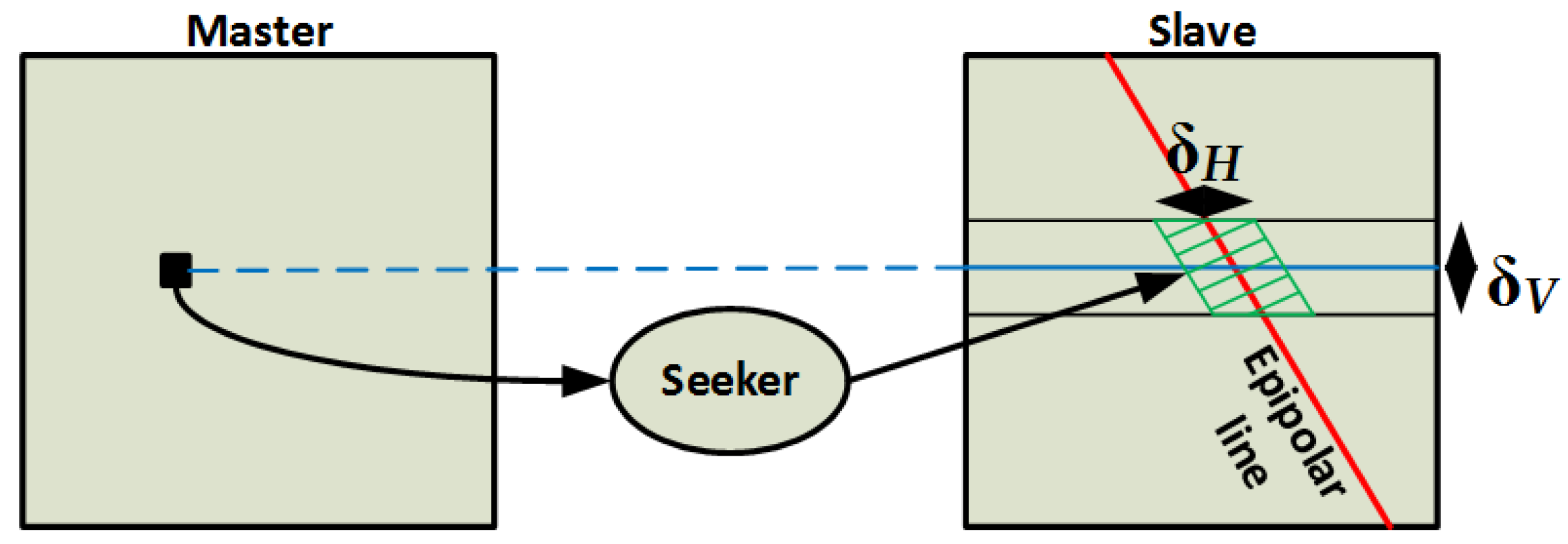
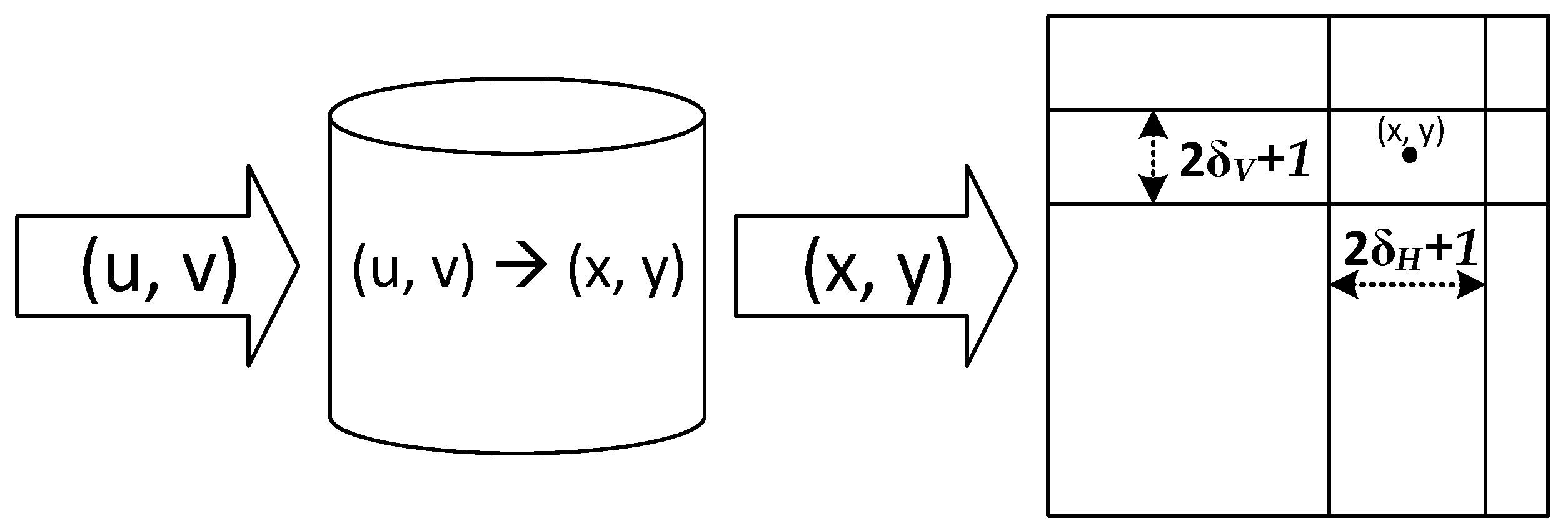
2.2.2. Positional Restriction
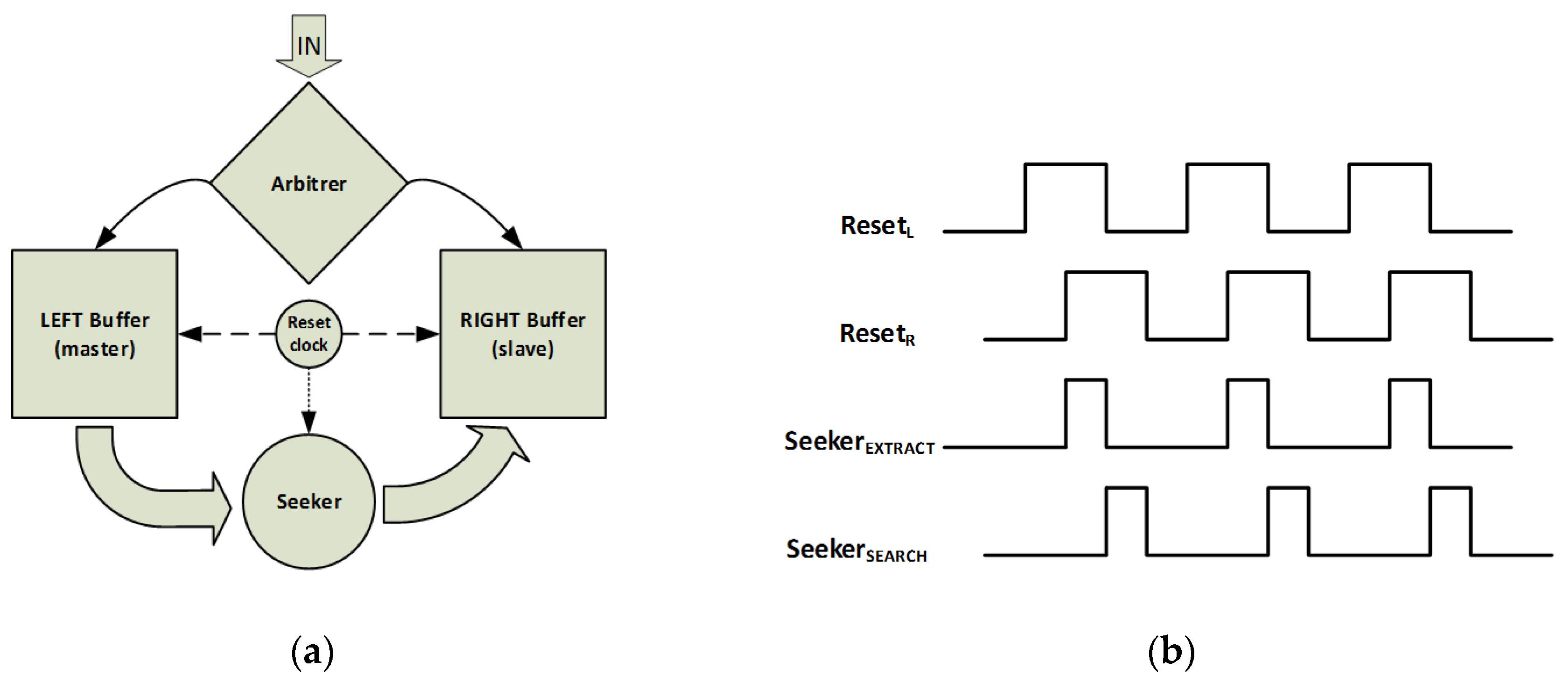
2.2.3. FPGA Implementation
3. Results
3.1. Simulated Test
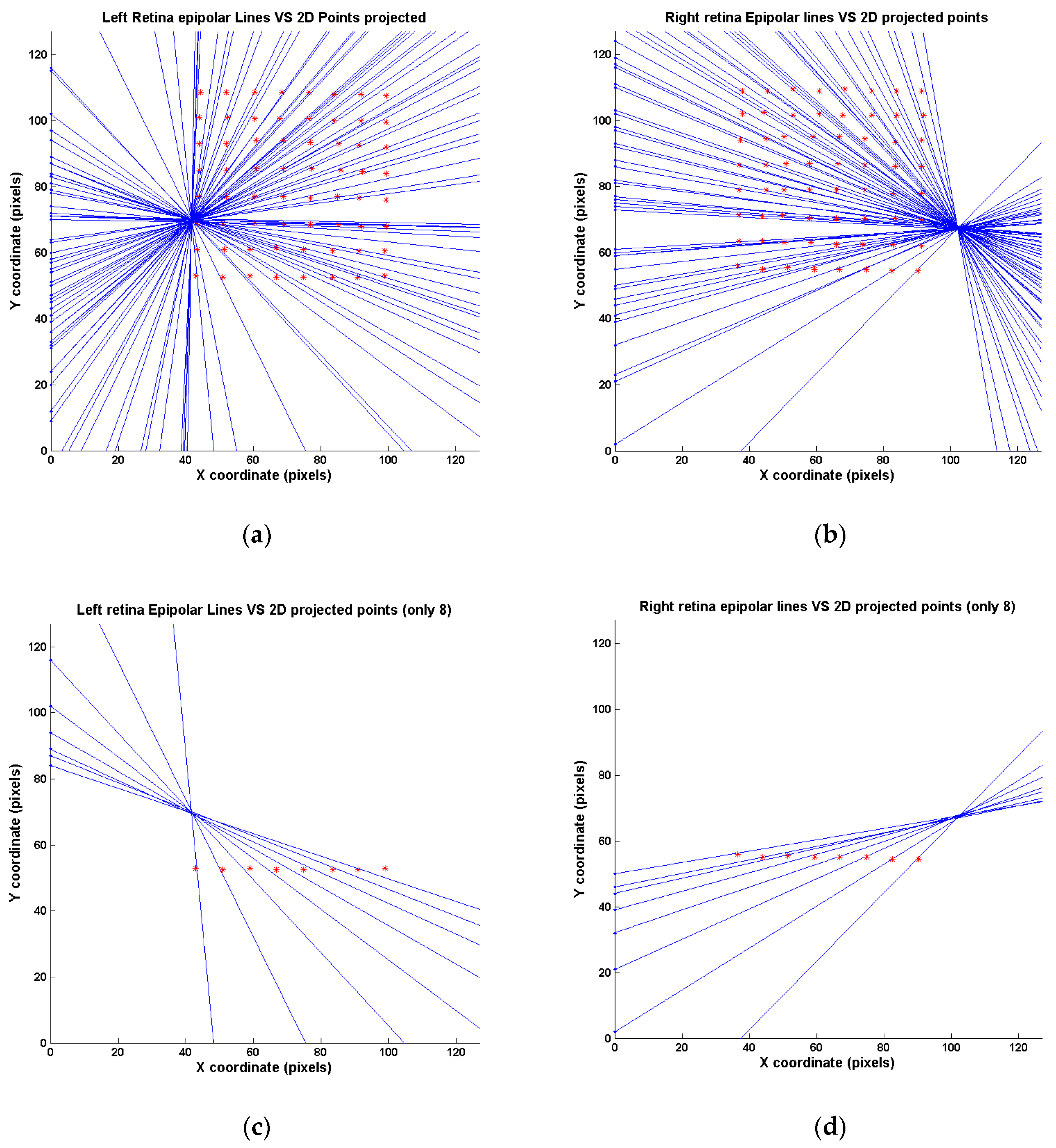
3.1.1. Applying the Epipolar Restriction
3.1.2. Applying the Positional Restriction
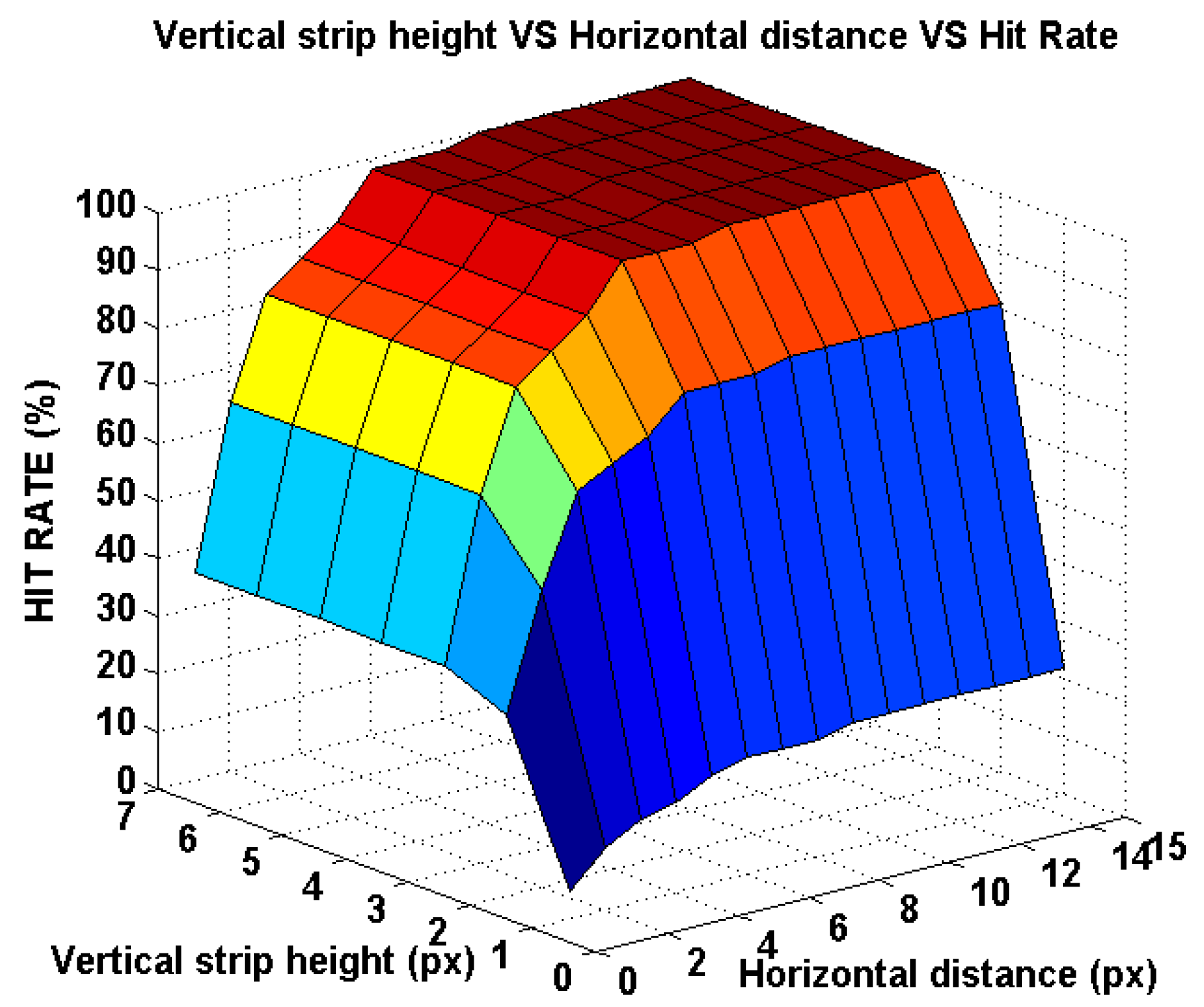
- Vertical variation: For values greater than three pixels (with the same horizontal variation), the hit rate does not vary. This will be the vertical variation selected.
- Horizontal variation: To obtain a 100% hot rate, a value of 9 needs to be selected. However, the hit rate variation between 6 and 9 is only 1.5%, but the searching space increases 50% using a vertical variation of 3 pixels. The horizontal variation selected is 6 pixels.
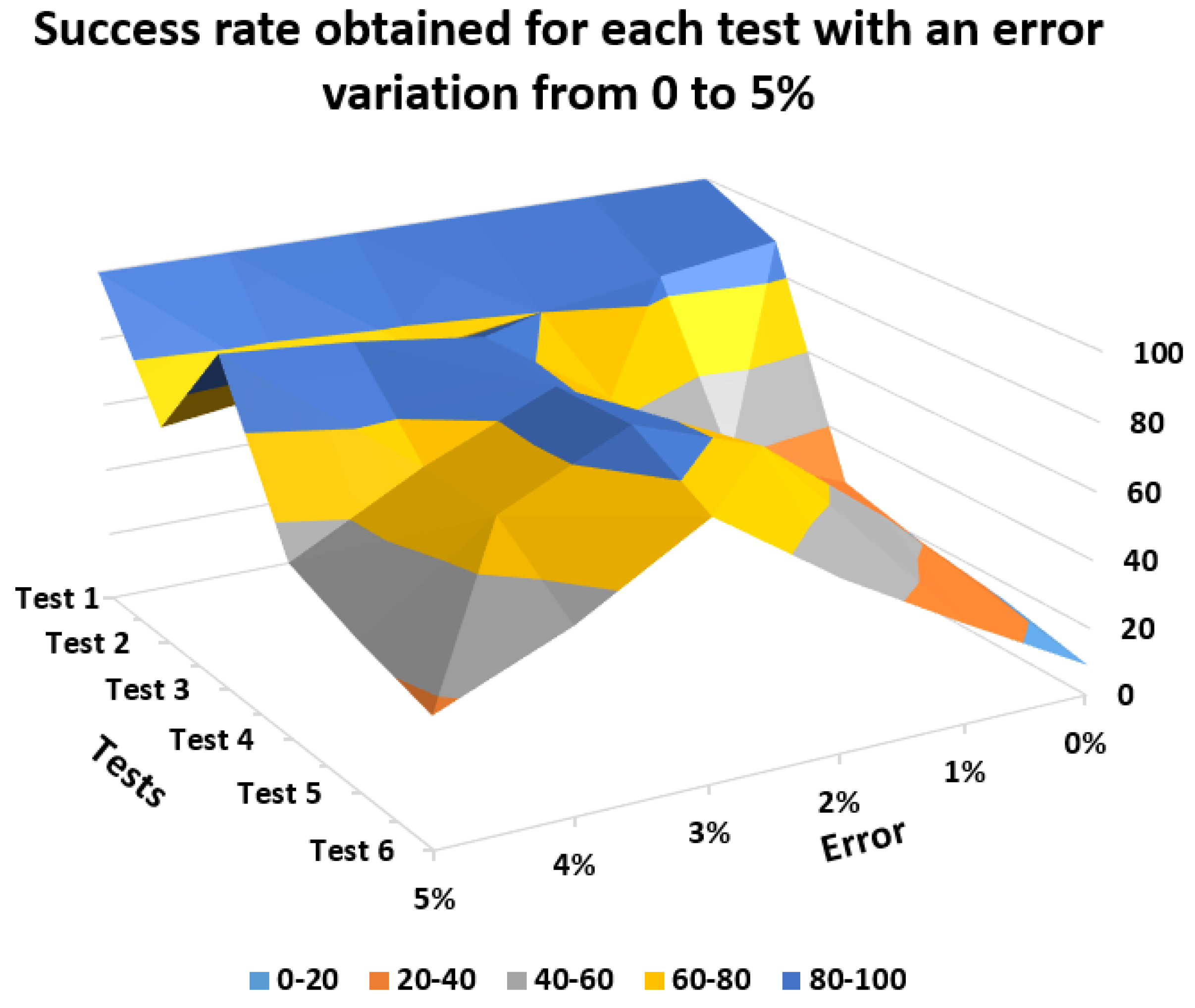
3.2. On-Board Test
- Input data: Visual information of both retinas. For the master retina, spikes from only one-pixel activation were fired with a specific firing rate. For the slave retina, spikes from several pixels were fired, and one of these pixels was the correspondence. The aim was to test the searching process implemented in the FPGA. This process takes the pixel from the master retina and searches for its correspondence in the slave retina.
- Output data: Information about the match found. Once the searching process determined that it has found the correspondence, the pixel coordinates were sent to the computer. Then, we evaluate the success of the matching process and the delay obtained, since the input data are received in the FPGA until the seeker responds. This elapsed time is calculated inside the FPGA and sent to the computer with the correspondence coordinates.
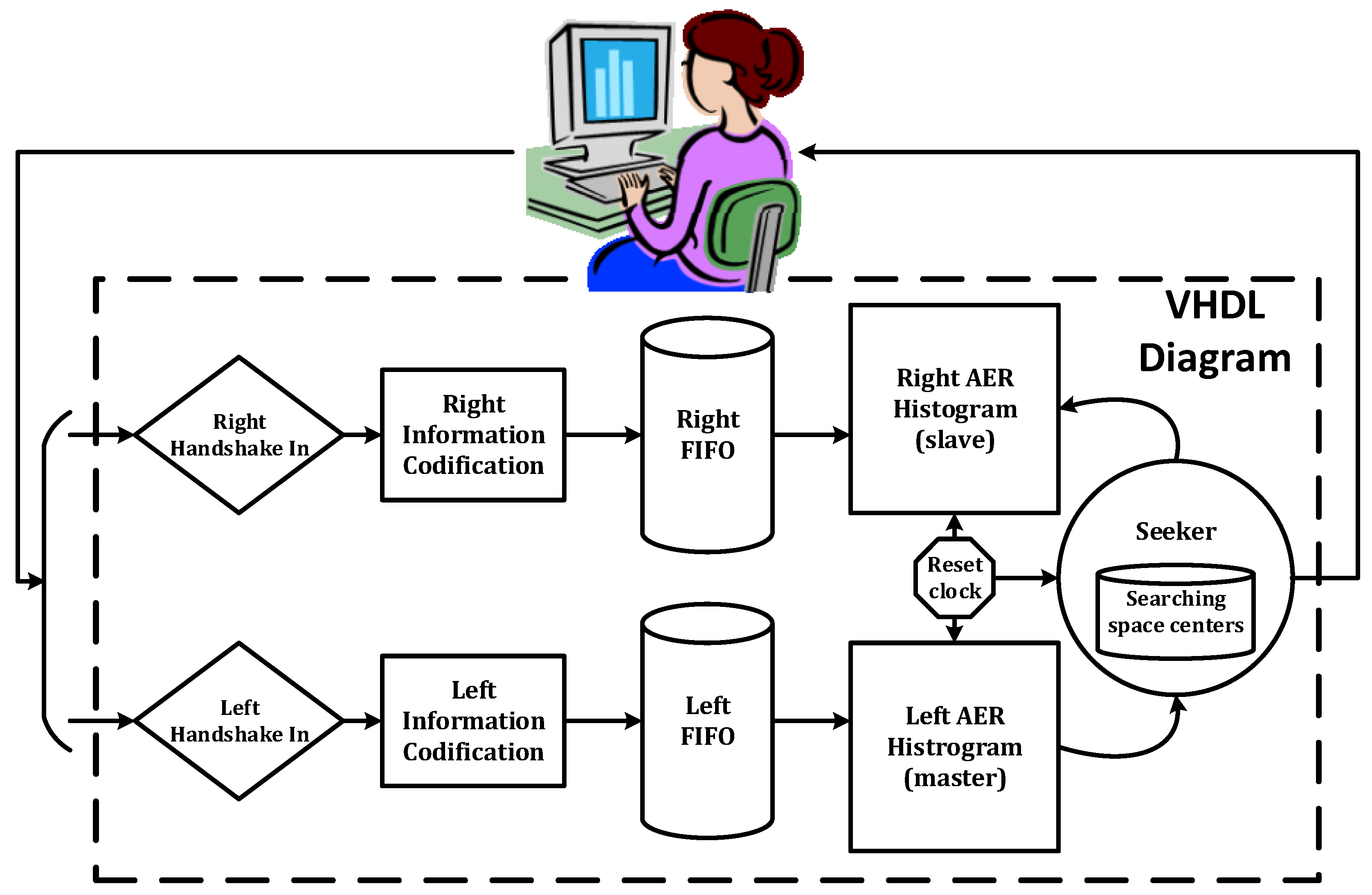
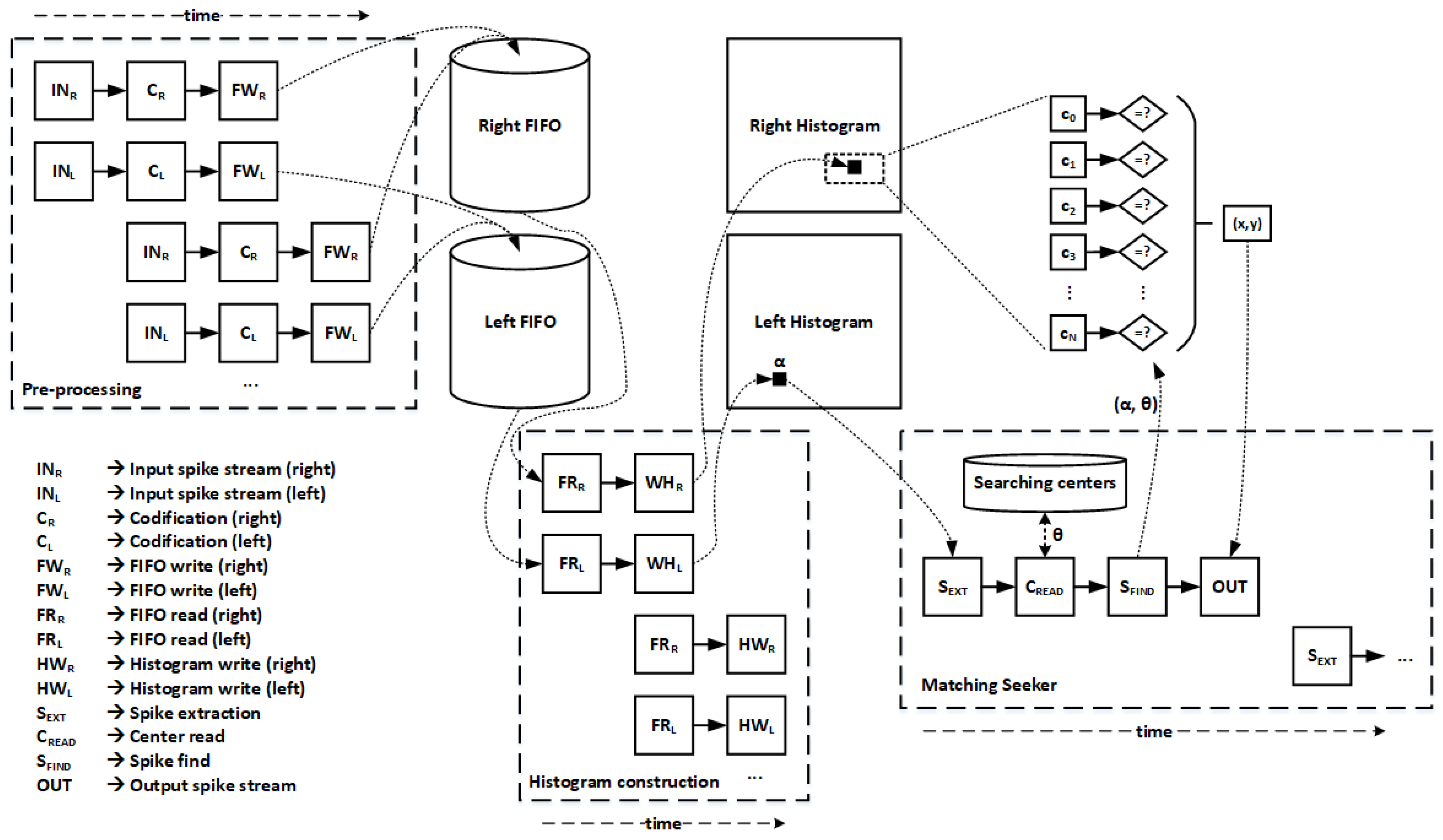
- Pre-processing process: This process integrates the activities ranging from the data input to the storage in the FIFO (queue) of each retina. It is divided into three independent phases that need the output of the previous one (they work as a pipeline). Moreover, this path is duplicated for each retina, and they work in parallel.
- Histogram construction: This process waits for any change in the FIFO and, when its content is not empty, it extracts the first spike stored in it and updates the histogram associated with this FIFO. This path is duplicated, and thus they also work in parallel.
- Matching seeker: This is a unique process that extracts the important information from the left histogram and finds its correspondence point in the right histogram inside the searching space bounded by the pre-calculated square.
- There is no correspondence point inside the searching space:
- ○
- No pixel activated inside (1 test).
- ○
- Some activated pixels but with different grayscale value (1 test).
- There is a correspondence point inside the searching space:
- ○
- Only the correspondence point is situated inside the searching space (1 test).
- ○
- More points are situated inside the searching space, but with different grayscale values (2–3 tests).
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Rosenfeld, A. Picture Processing by Computer. Comput. Surv. 1969, 1, 147–176. [Google Scholar] [CrossRef]
- Dyer, C.R. Volumetric scene reconstruction from multiple views. In Foundations of Image Understanding; Springer: Boston, MA, USA, 2001; pp. 1–20. [Google Scholar]
- Weng, J.; Cohen, P.; Herniou, M. Camera calibration with distortion models and accuracy evaluation. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 965–980. [Google Scholar] [CrossRef]
- Memon, Q.; Khan, S. Camera calibration and three-dimensional world reconstruction of stereo-vision using neural networks. Int. J. Syst. Sci. 2001, 32, 1155–1159. [Google Scholar] [CrossRef]
- Tsai, R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef]
- Douret, J.; Benosman, R. A volumetric multi-cameras method dedicated to road traffic monitoring. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004. [Google Scholar]
- Domínguez-Morales, M.; Cerezuela-Escudero, E.; Jiménez-Fernández, A.; Paz-Vicente, R.; Font-Calvo, J.L.; Iñigo-Blasco, P.; Linares-Barranco, A.; Jiménez-Moreno, G. Image matching algorithms in stereo vision using address-event-representation: A theoretical study and evaluation of the different algorithms. In Proceedings of the SIGMAP 2011—International Conference on Signal Processing and Multimedia Applications, Seville, Spain, 18–21 July 2011; pp. 79–84. [Google Scholar]
- Linares-Barranco, A.; Jiménez-Moreno, G.; Linares-Barranco, B.; Civit-Balcells, A. On algorithmic rate-coded AER generation. IEEE Trans. Neural Netw. 2006, 17, 771–788. [Google Scholar] [CrossRef] [PubMed]
- Serrano-Gotarredona, R.; Serrano-Gotarredona, T.; Acosta-Jiménez, A.J.; Serrano-Gotarredona, C.; Pérez-Carrasco, J.A.; Linares-Barranco, B.; Linares-Barranco, A.; Jiménez-Moreno, G.; Civit-Balcells, A. On real-time AER 2-D convolutions hardware for neuromorphic spike-based cortical processing. IEEE Trans. Neural Netw. 2008, 19, 1196–1219. [Google Scholar] [CrossRef]
- Serrano-Gotarredona, R.; Oster, M.; Lichtsteiner, P.; Linares-Barranco, A.; Paz-Vicente, R.; Gómez-Rodríguez, F.; Camunas-Mesa, L.; Berner, R.; Rivas-Perez, M.; Delbrück, T.; et al. CAVIAR: A 45k neuron, 5M synapse, 12G connects/s AER hardware sensory-processing-learning-actuating system for high-speed visual object recognition and tracking. IEEE Trans. Neural Netw. 2009, 20, 1417–1438. [Google Scholar] [CrossRef] [PubMed]
- Lichtsteiner, P.; Posch, C.; Delbrück, T. A 128×128 120dB 15μs Latency Asynchronous Temporal Contrast Vision Sensor. IEEE J. Solid-State Circuits 2008, 43, 566–576. [Google Scholar] [CrossRef]
- Belbachir, A.N.; Litzenberger, M.; Schraml, S.; Hofstatter, M.; Bauer, D.; Schon, P.; Humenberger, M.; Sulzbachner, C.; Lunden, T.; Merne, M. CARE: A dynamic stereo vision sensor system for fall detection. In Proceedings of the ISCAS 2012—2012 IEEE International Symposium on Circuits and Systems, Seoul, Korea, 20–23 May 2012. [Google Scholar]
- Rogister, P.; Benosman, R.; Ieng, S.-H.; Lichtsteiner, P.; Delbruck, T. Asynchronous Event-based Binocular Stereo Matching. IEEE Trans. Neural Netw. 2012, 23, 347–353. [Google Scholar] [CrossRef] [PubMed]
- Jimenez-Fernandez, A.; Jimenez-Moreno, G.; Linares-Barranco, A.; Dominguez-Morales, M.J.; Paz-Vicente, R.; Civit-Balcells, A. A neuro-inspired spike-based PID motor controller for multi-motor robots with low cost FPGAs. Sensors 2012, 12, 3831–3856. [Google Scholar] [CrossRef] [PubMed]
- Jimenez-Fernandez, A.; Cerezuela-Escudero, E.; Miro-Amarante, L.; Dominguez-Moralse, M.J.; De Asis Gomez-Rodriguez, F.; Linares-Barranco, A.; Jimenez-Moreno, G. A binaural neuromorphic auditory sensor for FPGA: A spike signal processing approach. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 804–818. [Google Scholar] [CrossRef]
- Firouzi, M.; Conradt, J.; Dikov, G.; Richter, C.; Röhrbein, F. Spiking Cooperative Stereo-Matching at 2 ms Latency with Neuromorphic Hardware. In Conference on Biomimetic and Biohybrid Systems; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Eibensteiner, F.; Kogler, J.; Scharinger, J. A high-performance hardware architecture for a frameless stereo vision algorithm implemented on a FPGA platform. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Berner, R.; Delbrück, T.; Civit-Balcells, A.; Linares-Barranco, A. A 5 Meps $100 USB2.0 Address-Event Monitor-Sequencer Interface. In Proceedings of the 2007 IEEE International Symposium on Circuits and Systems, New Orleans, LA, USA, 27–30 May 2007. [Google Scholar]
- Domínguez-Morales, M.; Cerezuela-Escudero, E.; Perez-Peña, F.; Jiménez-Fernández, A.; Linares-Barranco, A.; Jiménez-Moreno, G. On the AER Stereo-Vision Processing: A Spike Approach to Epipolar Matching. Neural Inf. Process. 2013, 8226, 267–275. [Google Scholar]
- Faugeras, O.; Luong, Q.; Maybank, S. Camera self-calibration: Theory and experiments. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 1992; Volume 588, pp. 321–334. ISBN 978-3-540-55426-4. [Google Scholar]
- Faugeras, O. Stratification of three-dimensional vision: Projective, affine, and metric representations: Errata. J. Opt. Soc. Am. A 1995, 12, 1606. [Google Scholar] [CrossRef]
- Martins, H.A.; Birk, J.R.; Kelley, R.B. Camera models based on data from two calibration planes. Comput. Graph. Image Process. 1981, 17, 173–180. [Google Scholar] [CrossRef]
- Ricolfe-Viala, C.; Sánchez-Salmerón, A.J. Using the camera pin-hole model restrictions to calibrate the lens distortion model. Opt. Laser Technol. 2011, 43, 996–1005. [Google Scholar] [CrossRef]
- Hernandez-Juarez, D.; Chacon, A.; Espinosa, A.; Vazquez, D.; Moure, J.C.; Lopez, A.M. Embedded real-time stereo estimation via Semi-Global Matching on the GPU. Procedia Comput. Sci. 2016, 80, 143–153. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Retina\Error | Average Error (pixels/point) | Max Error (pixels) | σ (pixels) |
|---|---|---|---|
| Right Retina | 1.3957 | 4.8593 | 1.5492 |
| Left Retina | 2.2299 | 5.8227 | 1.0354 |
| Vertical\Horizontal Strip (px) | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 4.68 | 10.93 | 14.06 | 15.62 | 18.75 | 20.31 | 20.31 | 21.87 | 21.87 | 21.87 | 21.87 | 21.87 | 21.87 | 21.87 | 21.87 |
| 2 | 31.25 | 51.56 | 67.18 | 70.31 | 73.43 | 79.68 | 79.68 | 79.68 | 81.25 | 81.25 | 81.25 | 81.25 | 81.25 | 81.25 | 81.25 |
| 3 | 35.93 | 64.06 | 81.25 | 85.93 | 90.62 | 98.43 | 98.43 | 98.43 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| 4 | 35.93 | 64.06 | 81.25 | 85.93 | 90.62 | 98.43 | 98.43 | 98.43 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| 5 | 35.93 | 64.06 | 81.25 | 85.93 | 90.62 | 98.43 | 98.43 | 98.43 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| 6 | 35.93 | 64.06 | 81.25 | 85.93 | 90.62 | 98.43 | 98.43 | 98.43 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| 7 | 35.93 | 64.06 | 81.25 | 85.93 | 90.62 | 98.43 | 98.43 | 98.43 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| \Error (%) | 0 | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|---|
| Time response (ms) | 7.9 | 8.1 | 8.5 | 8.8 | 8.9 | 9.2 |
| Success rate (%) | 30.6 | 48.3 | 67.8 | 84.1 | 70.5 | 55.4 |
| Slices | Used (number) | Max (number) | Usage (%) |
|---|---|---|---|
| Slice Registers | 428 | 20,480 | 2.09% |
| - used as Flip-Flops | 342 | 20,480 | 1.67% |
| - used as Latches | 86 | 20,480 | 0.25% |
| Slice LookUp Tables (LUTs) | 7066 | 20,480 | 3.5% |
| - used as Logic | 1168 | 20,480 | 5.75% |
| - used as Memory | 5898 | 6080 | 97% |
| TOTAL | 7494 | 20,480 | 36.59% |
| On-Chip Power | Consumption (mW) | From total (%) |
|---|---|---|
| Dynamic | 1 | 1.1 |
| - Signals | 0.27 | 0.29 |
| - Logic | 0.68 | 0.74 |
| - I/O | 0.05 | 0.07 |
| Static | 91 | 98.9 |
| TOTAL | 92 | 100 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Domínguez-Morales, M.; Domínguez-Morales, J.P.; Jiménez-Fernández, Á.; Linares-Barranco, A.; Jiménez-Moreno, G. Stereo Matching in Address-Event-Representation (AER) Bio-Inspired Binocular Systems in a Field-Programmable Gate Array (FPGA). Electronics 2019, 8, 410. https://doi.org/10.3390/electronics8040410
Domínguez-Morales M, Domínguez-Morales JP, Jiménez-Fernández Á, Linares-Barranco A, Jiménez-Moreno G. Stereo Matching in Address-Event-Representation (AER) Bio-Inspired Binocular Systems in a Field-Programmable Gate Array (FPGA). Electronics. 2019; 8(4):410. https://doi.org/10.3390/electronics8040410
Chicago/Turabian StyleDomínguez-Morales, Manuel, Juan P. Domínguez-Morales, Ángel Jiménez-Fernández, Alejandro Linares-Barranco, and Gabriel Jiménez-Moreno. 2019. "Stereo Matching in Address-Event-Representation (AER) Bio-Inspired Binocular Systems in a Field-Programmable Gate Array (FPGA)" Electronics 8, no. 4: 410. https://doi.org/10.3390/electronics8040410
APA StyleDomínguez-Morales, M., Domínguez-Morales, J. P., Jiménez-Fernández, Á., Linares-Barranco, A., & Jiménez-Moreno, G. (2019). Stereo Matching in Address-Event-Representation (AER) Bio-Inspired Binocular Systems in a Field-Programmable Gate Array (FPGA). Electronics, 8(4), 410. https://doi.org/10.3390/electronics8040410