Intelligent Airflow Controls for a Stalling-Free Operation of an Oscillating Water Column-Based Wave Power Generation Plant

 ,
,  , and
, and
Abstract
:1. Introduction
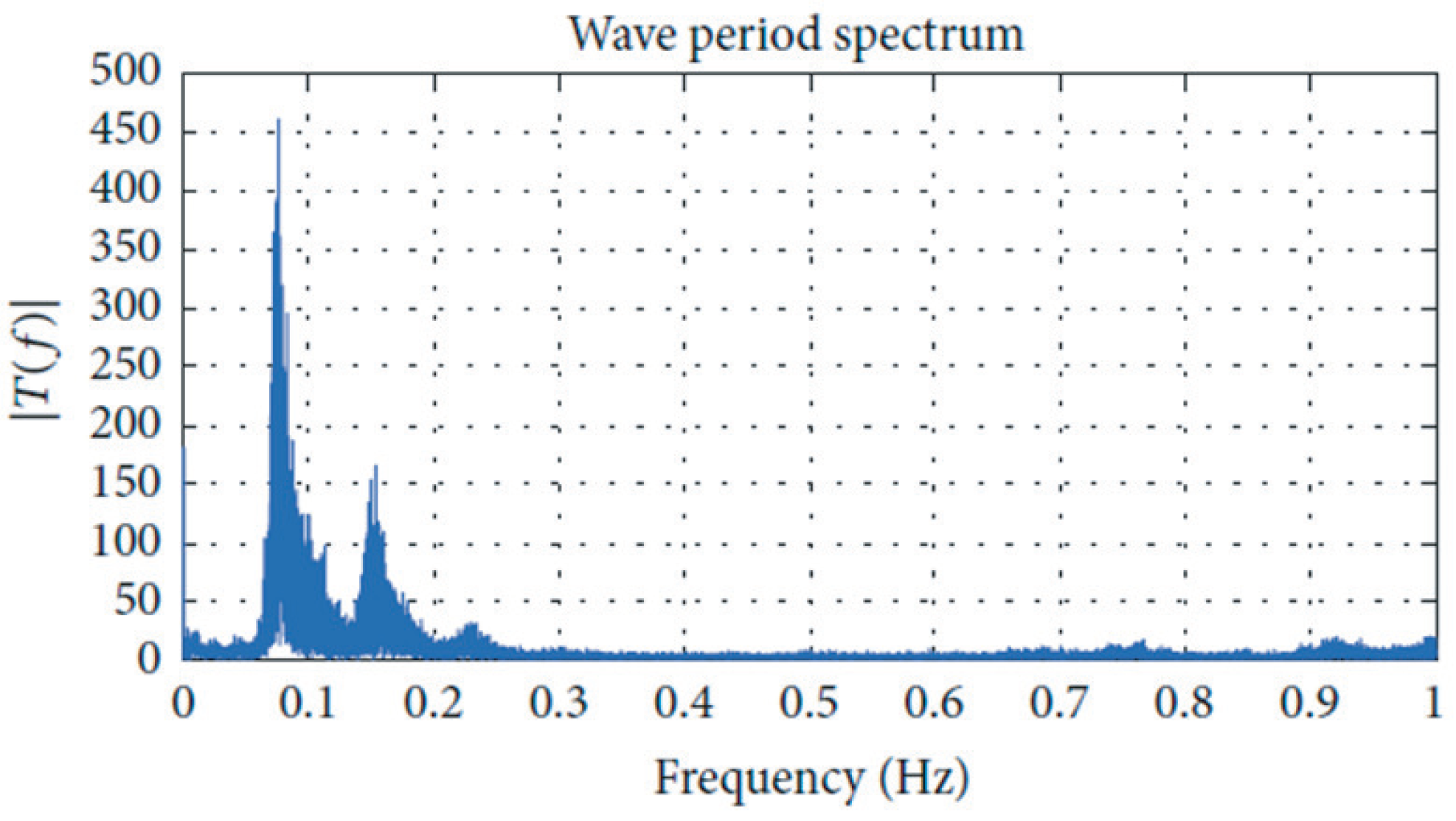
2. Wave Background and Model
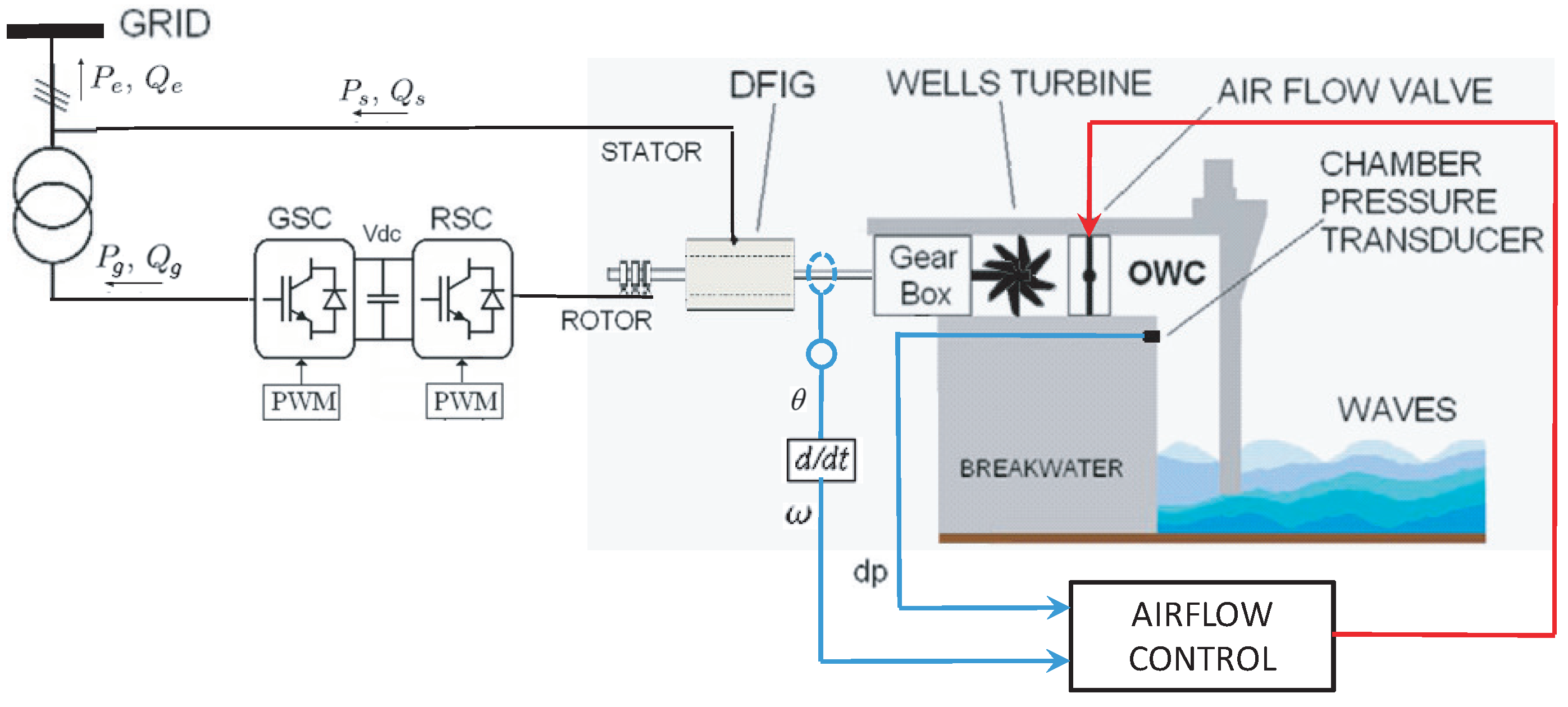
3. OWC Plant Modeling
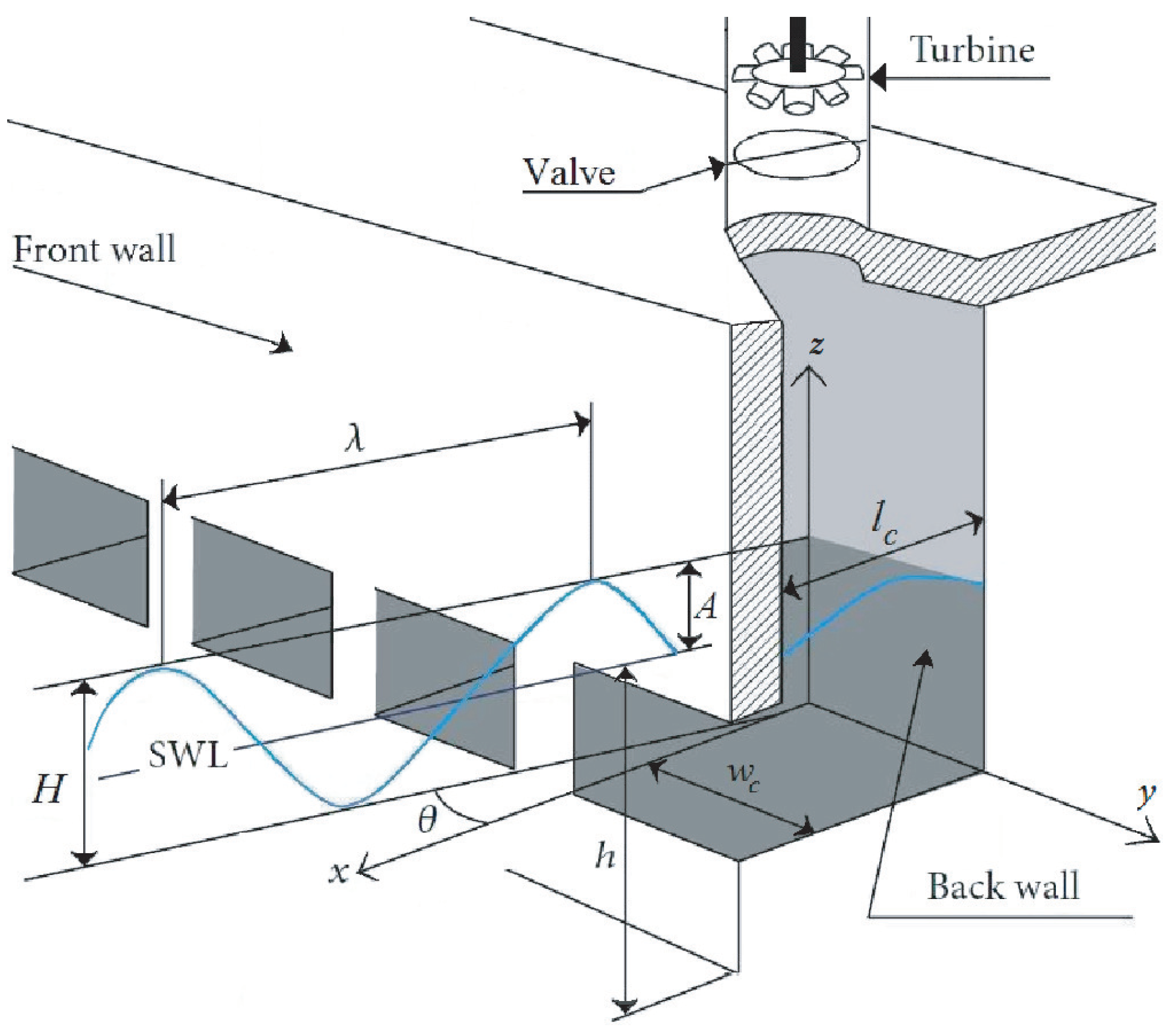
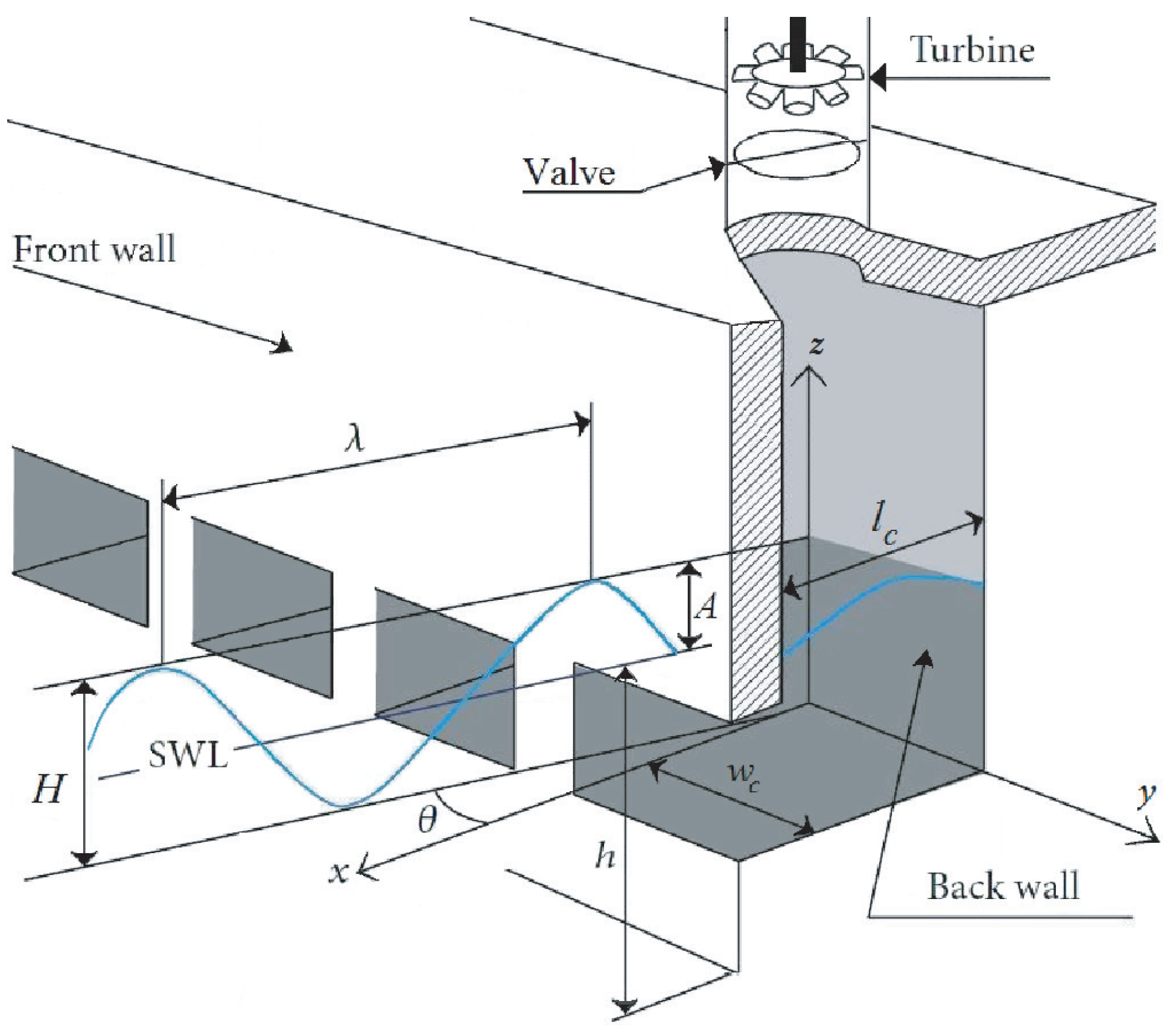
3.1. Capture Chamber Model
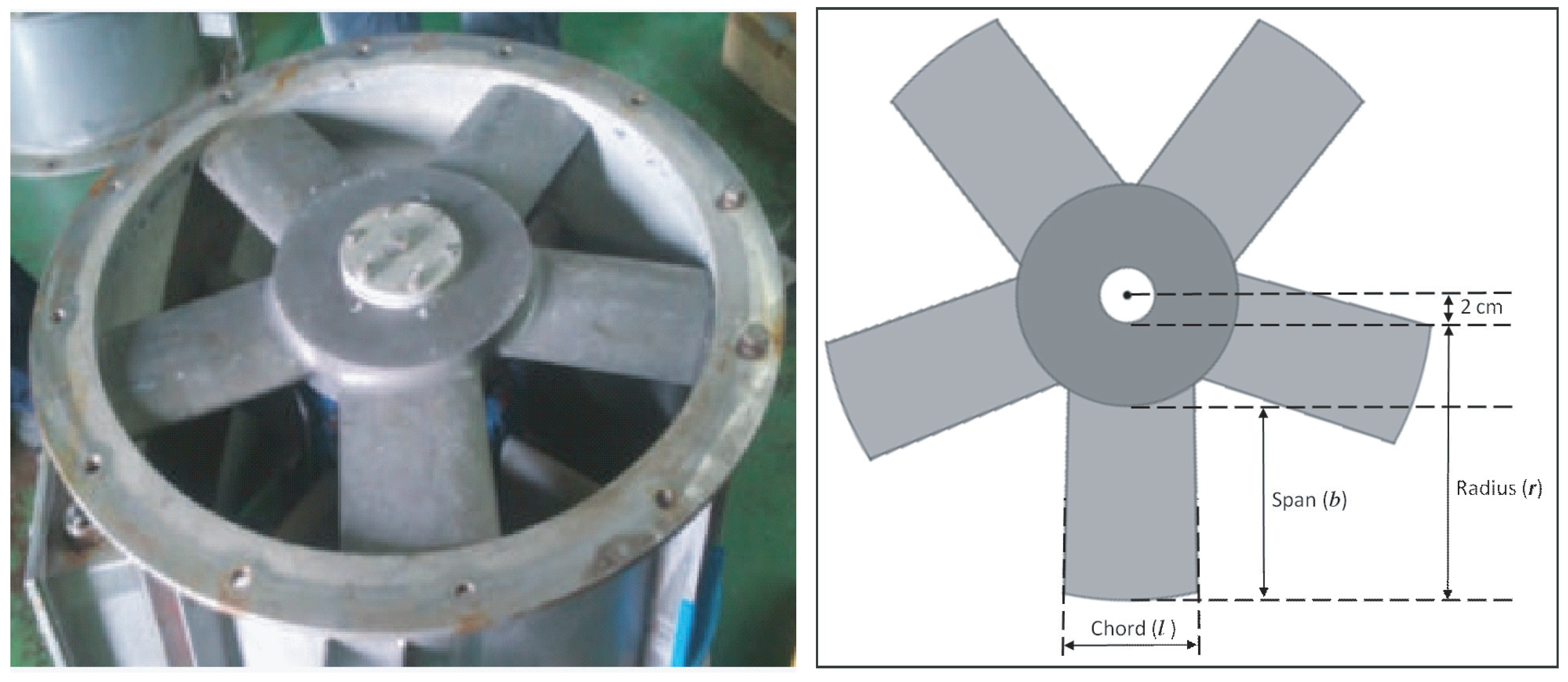
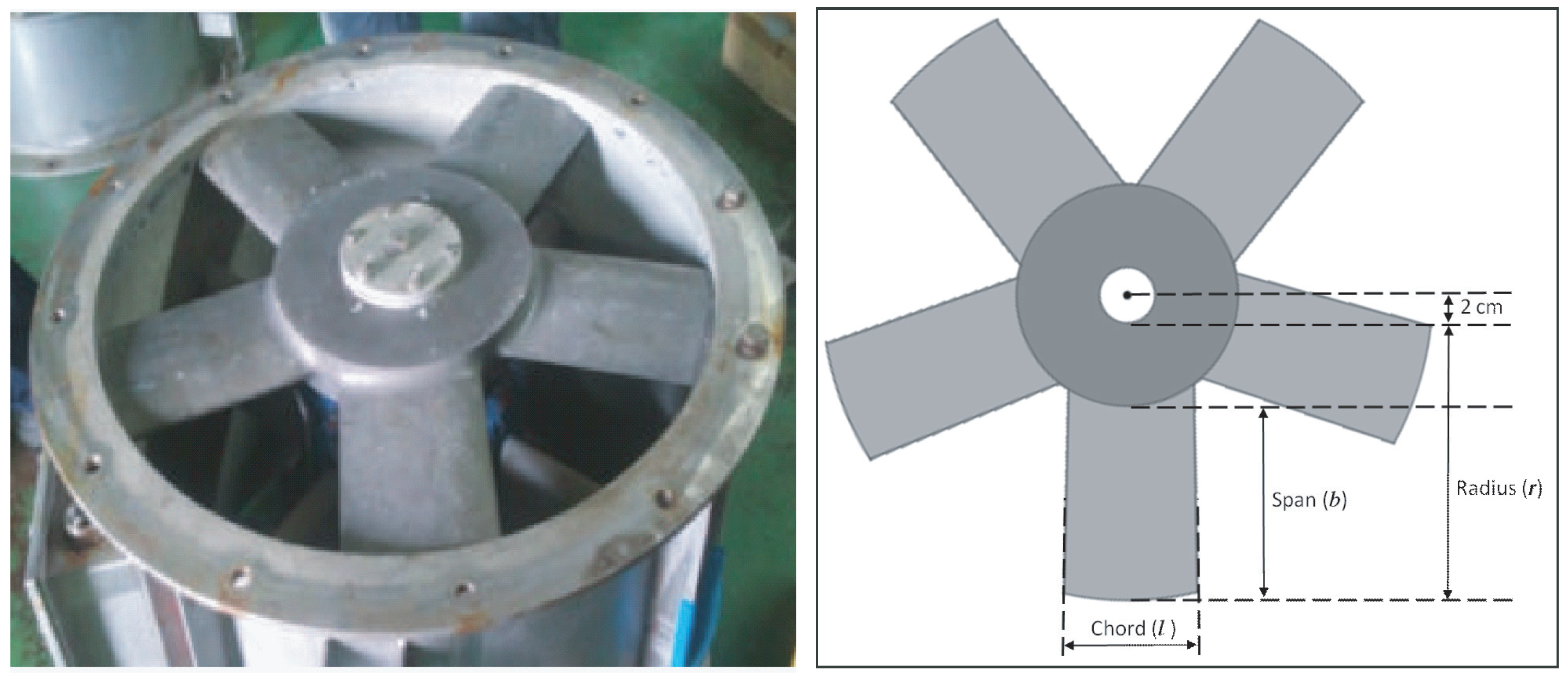
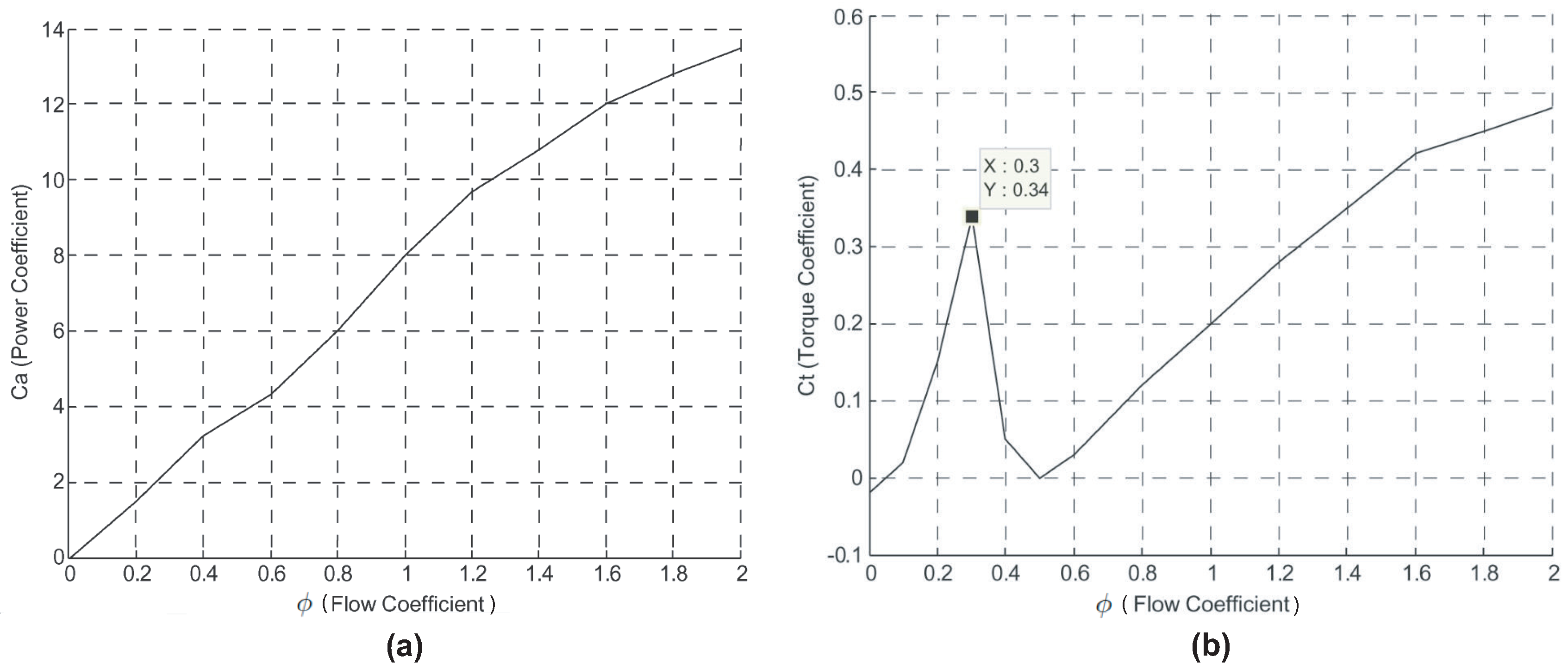
3.2. Wells Turbine Model
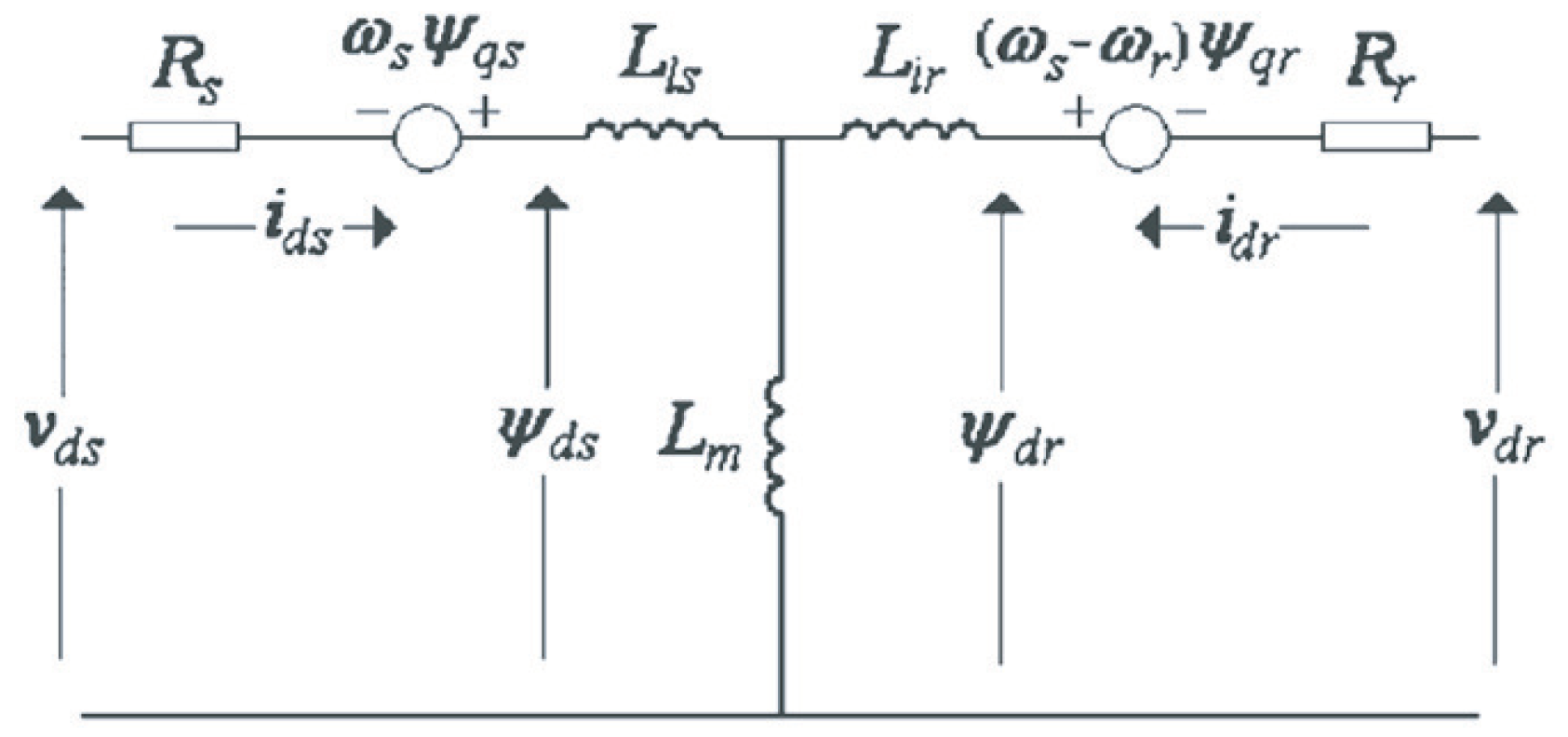
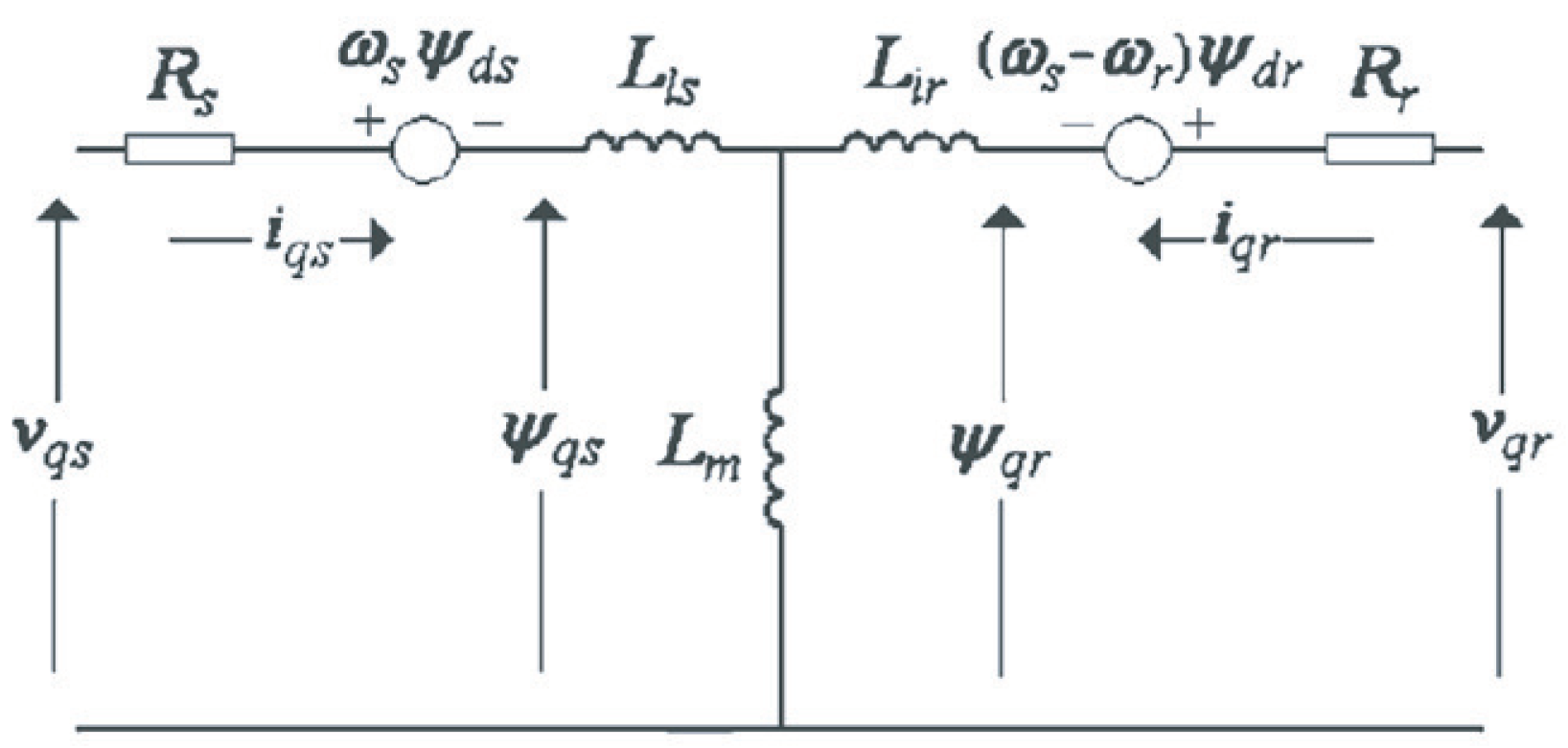
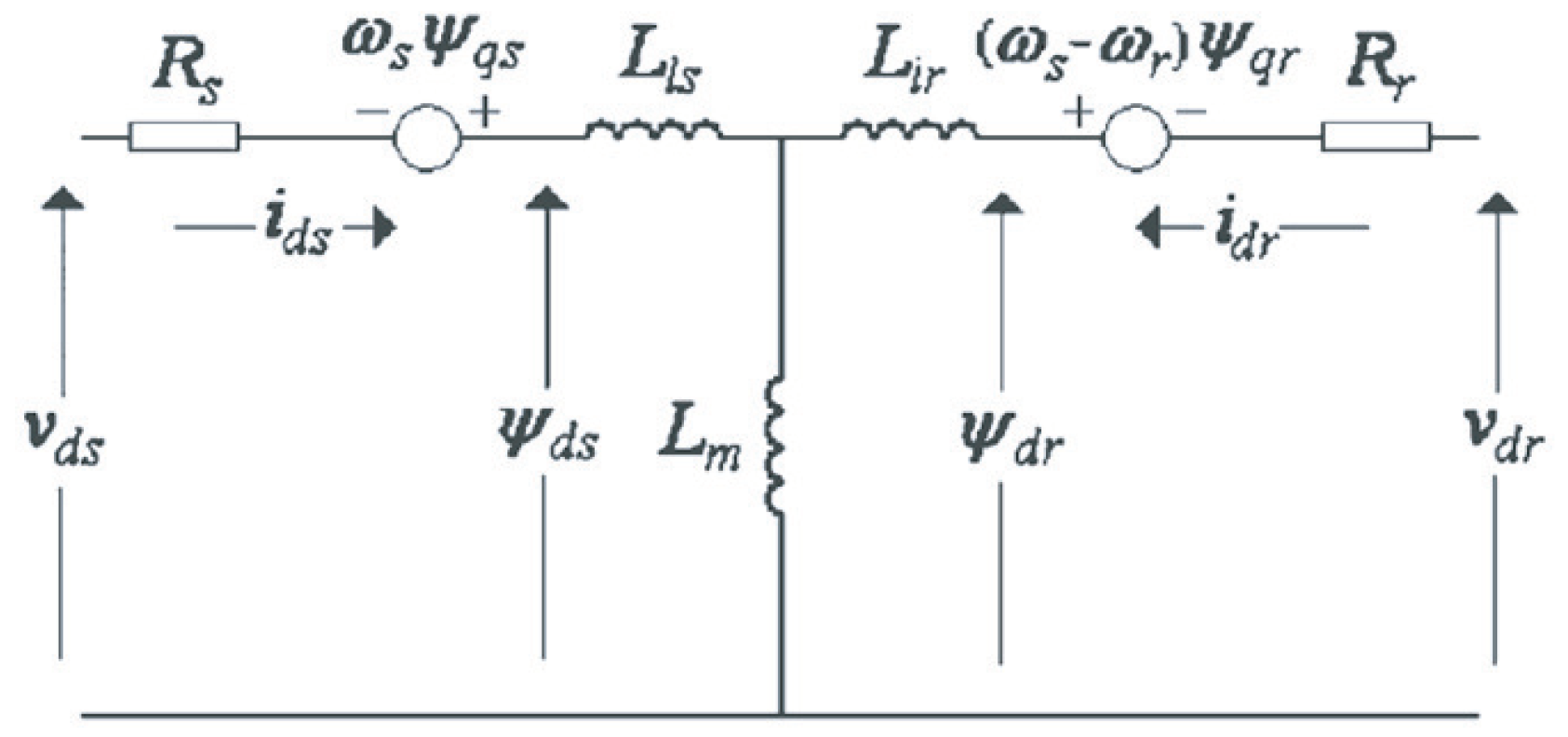
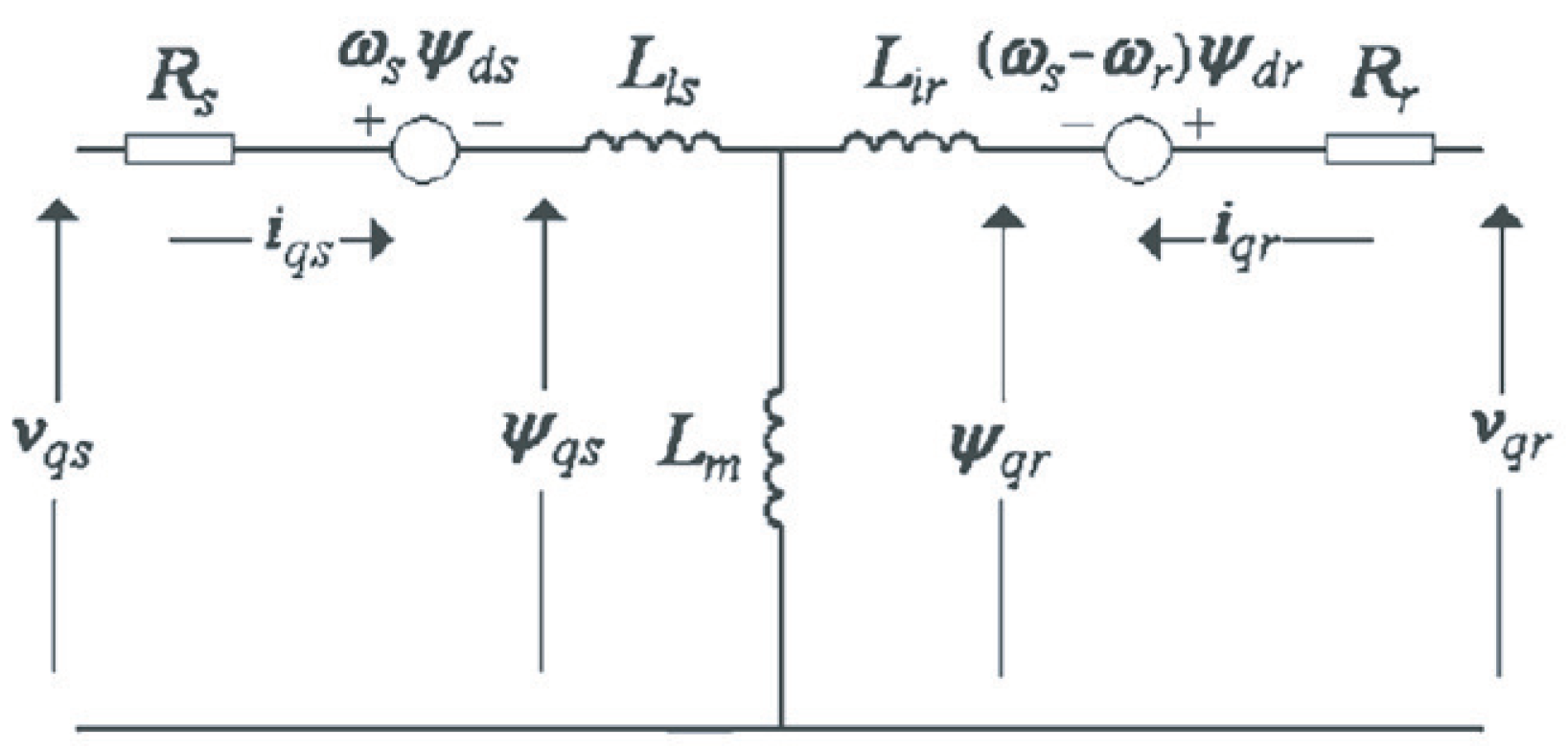
3.3. Doubly-Fed Induction Generator Model
3.4. Back-to-Back Converter Model
4. Problem Statement
5. Control Statement
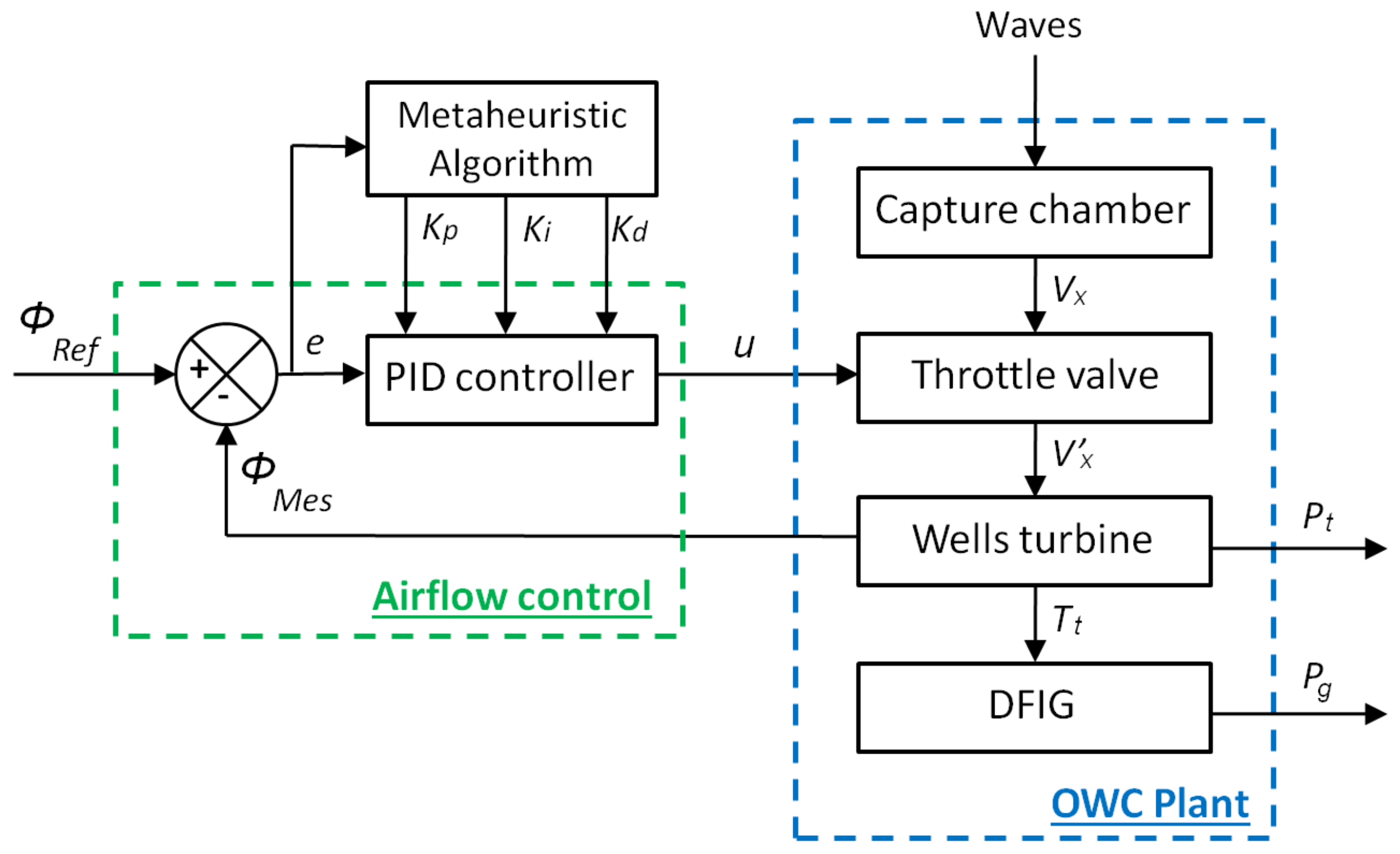
5.1. Metaheuristic-Based Airflow Control
5.1.1. Control Problem Formulation
5.1.2. Harmony Search Algorithm
- Step 1: Initializing the Harmony Memory (HM) arbitrarily with:Here, is a possible solution, and is the size of the HM.
- Step 2: Improving a new solution from the harmony memory.
- Step 3: Updating the harmony memory. New solutions from Step 2 are assessed. In fact, if the solution offers a better cost function compared to that of the worst component in the harmony memory, then the new solution will replace the worst element. Otherwise, it is discarded.
- Step 4: Abort executing when the termination condition is reached. Else, return to Step 2.
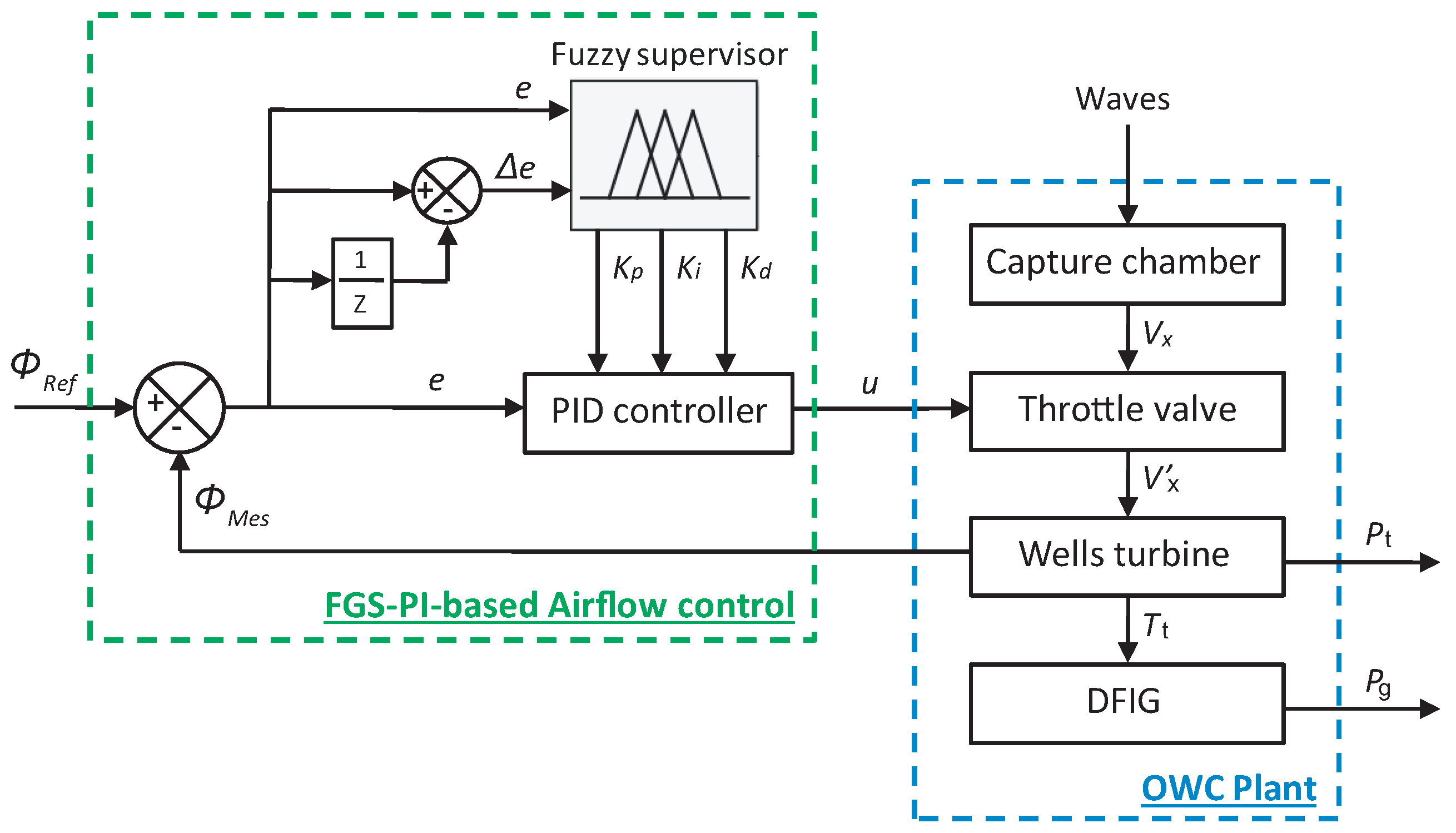
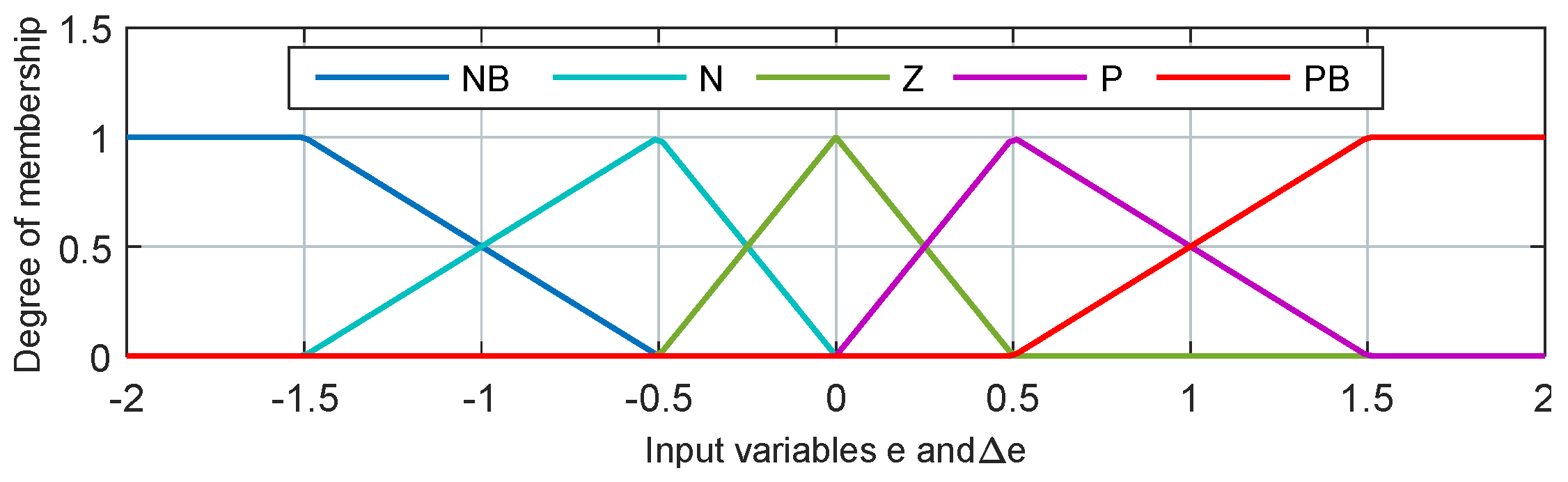
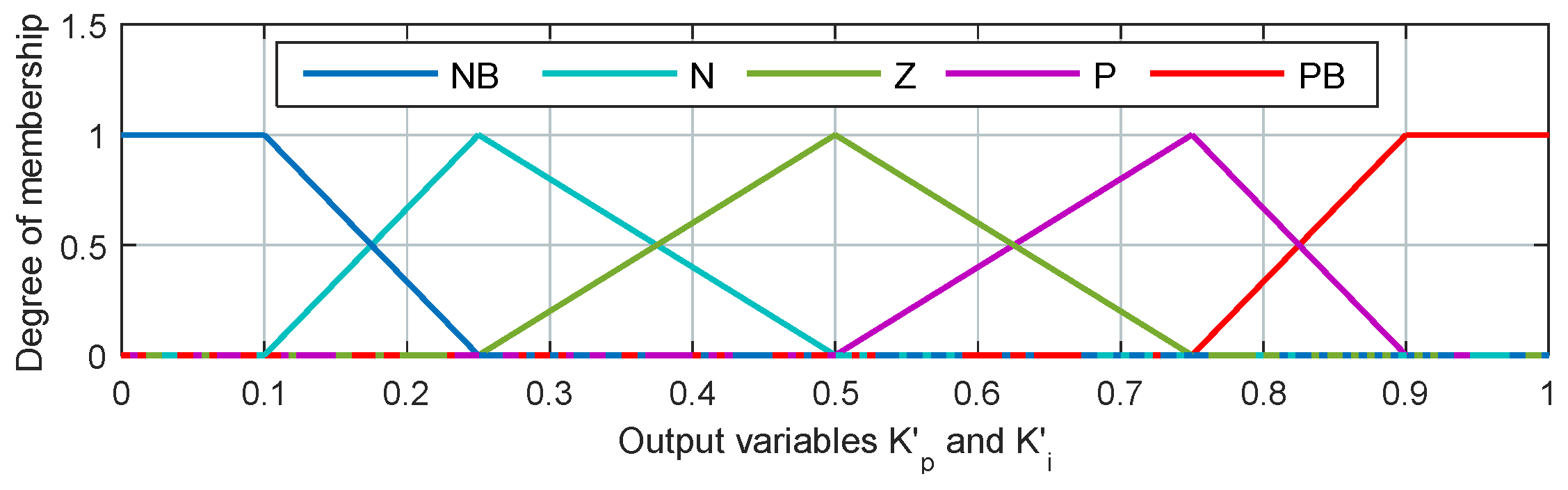
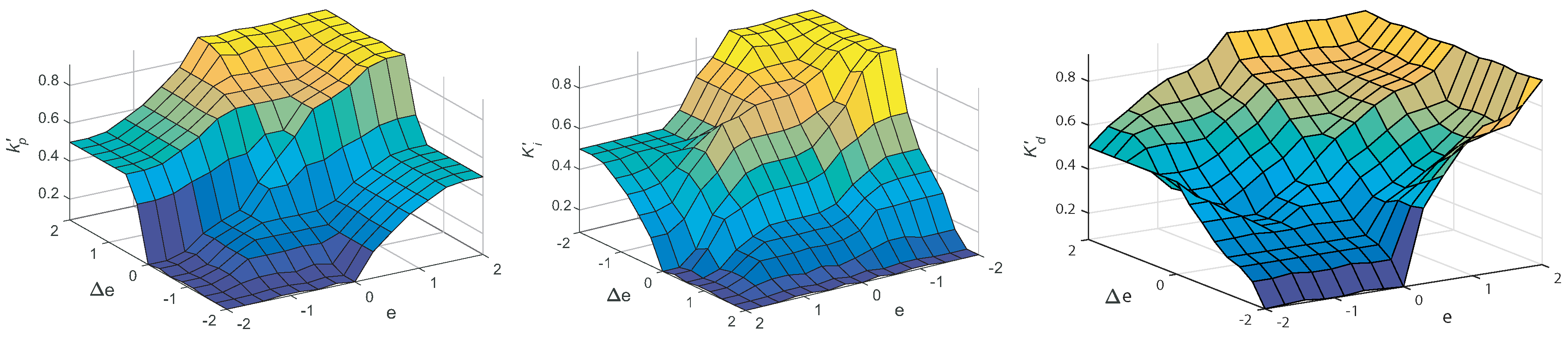
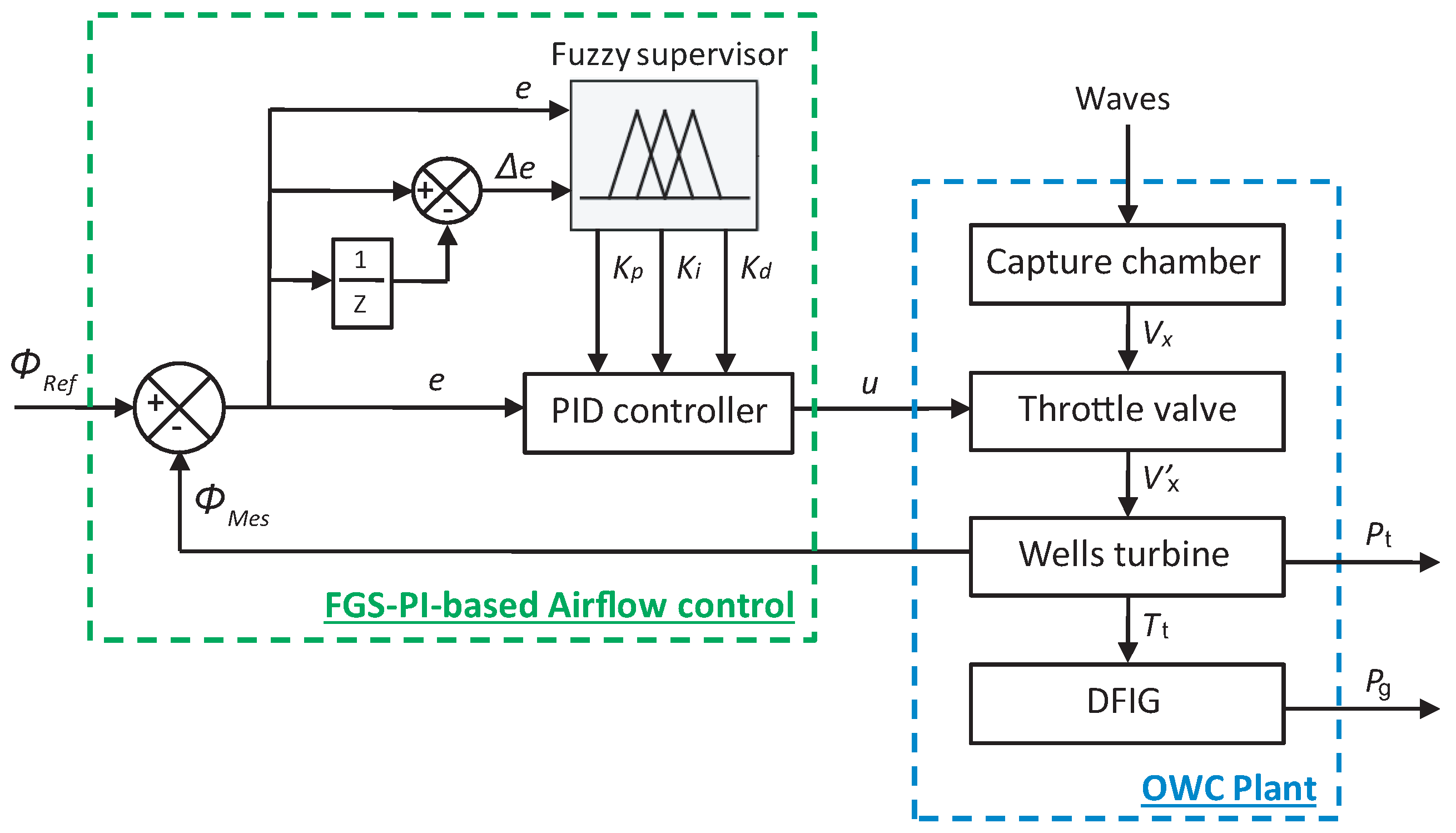
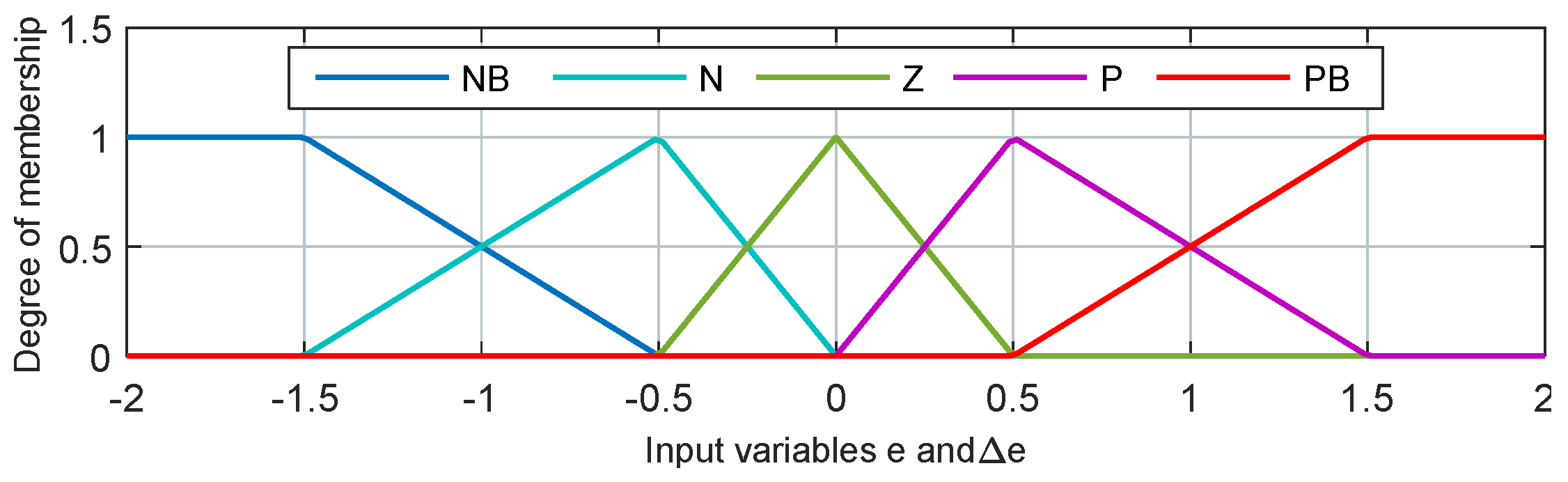
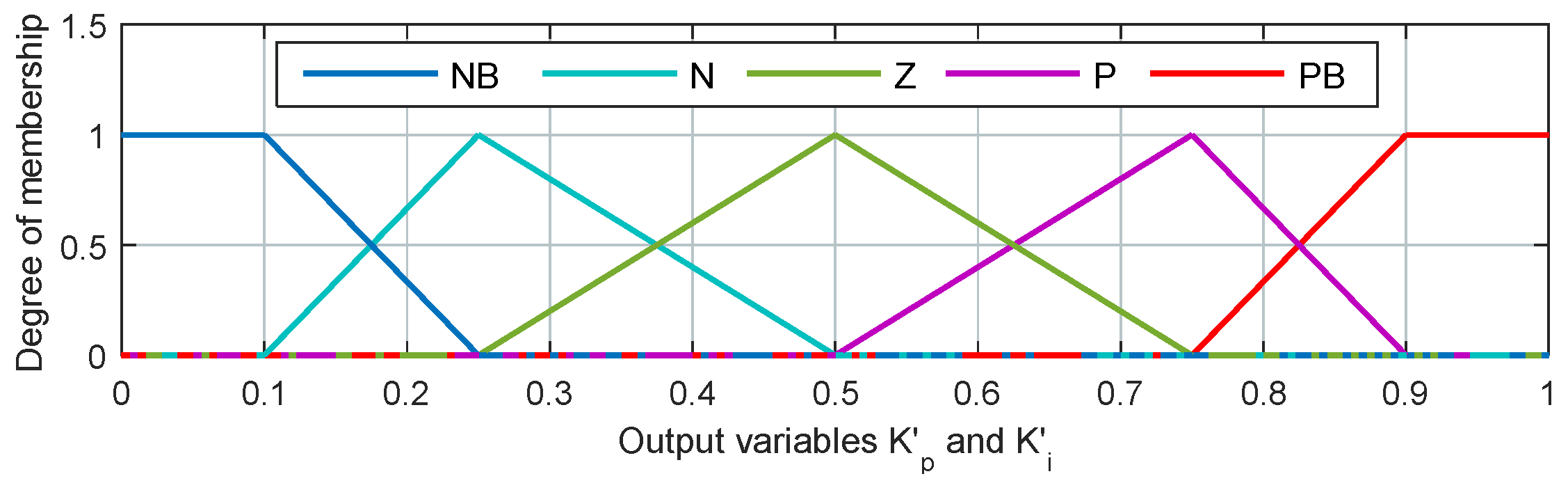
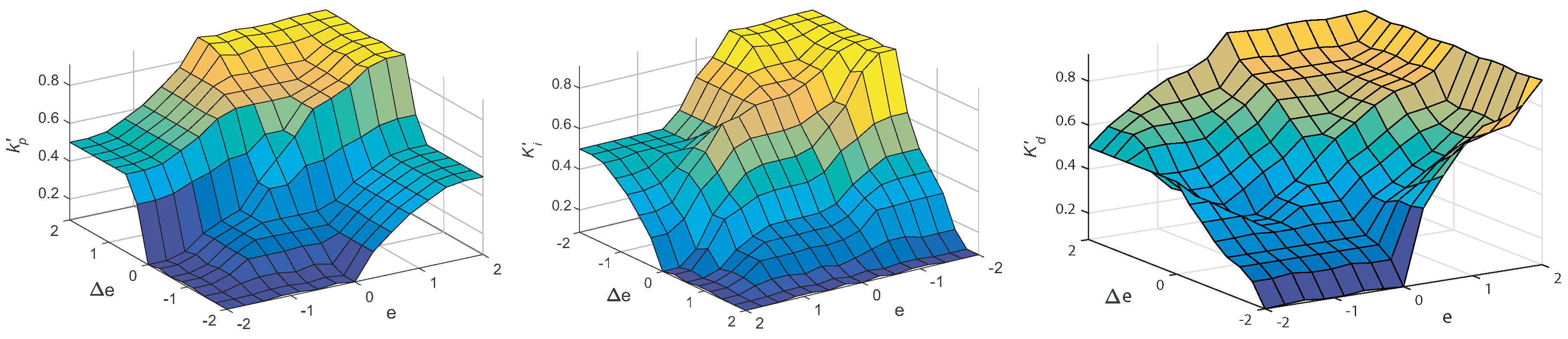
5.2. Fuzzy Gain Schedule-Based Airflow Control
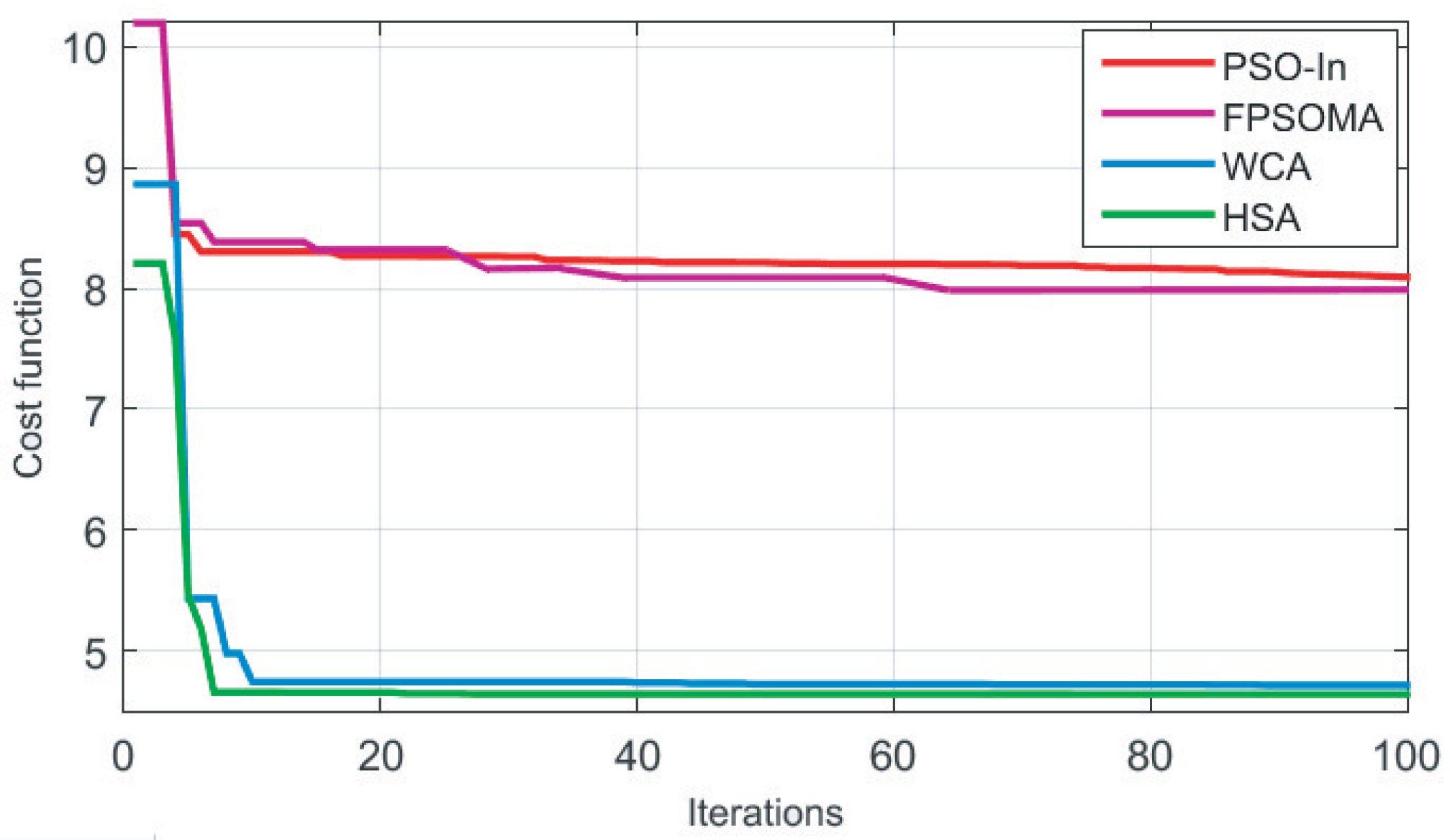
6. Results and Discussion
6.1. Advanced PID Tuning and Setup
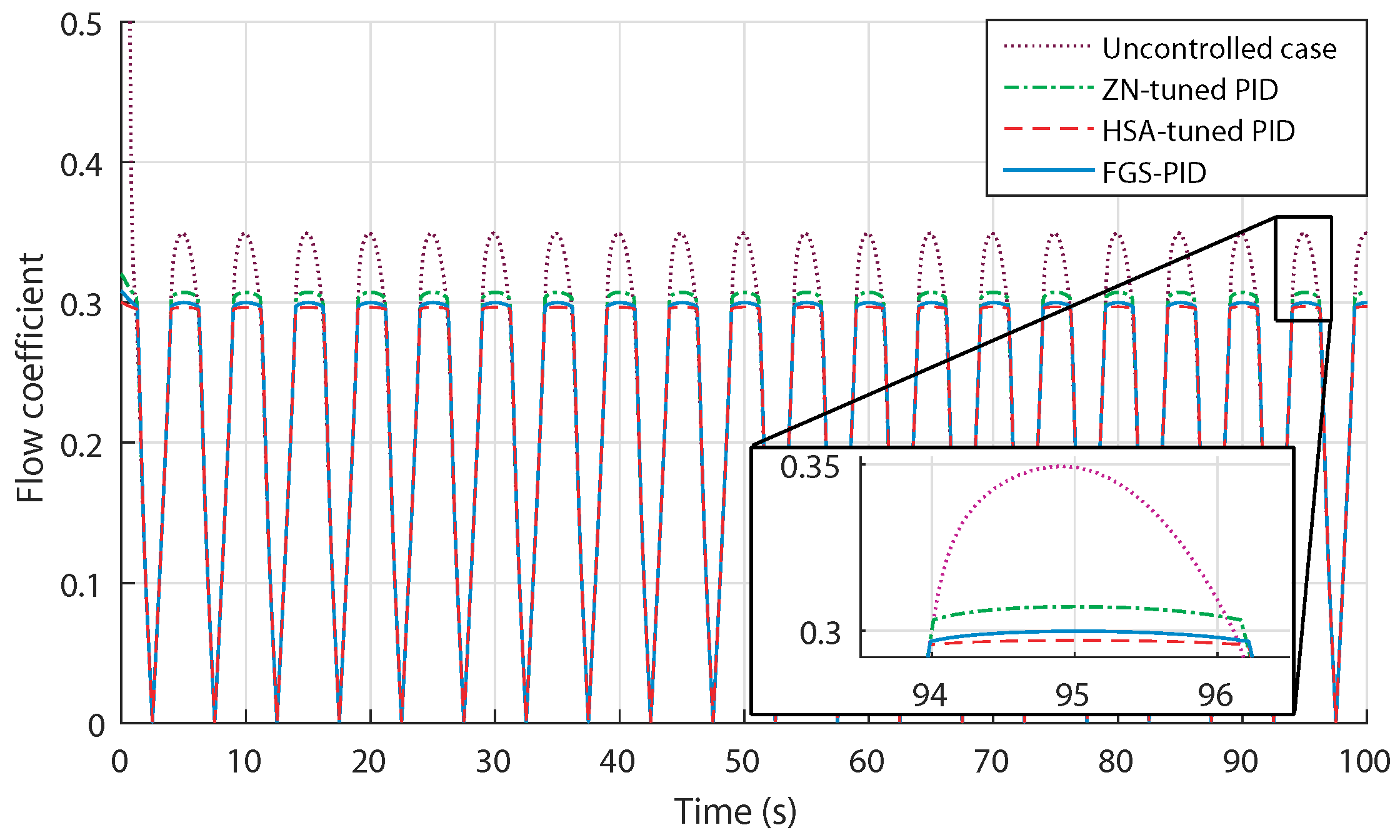
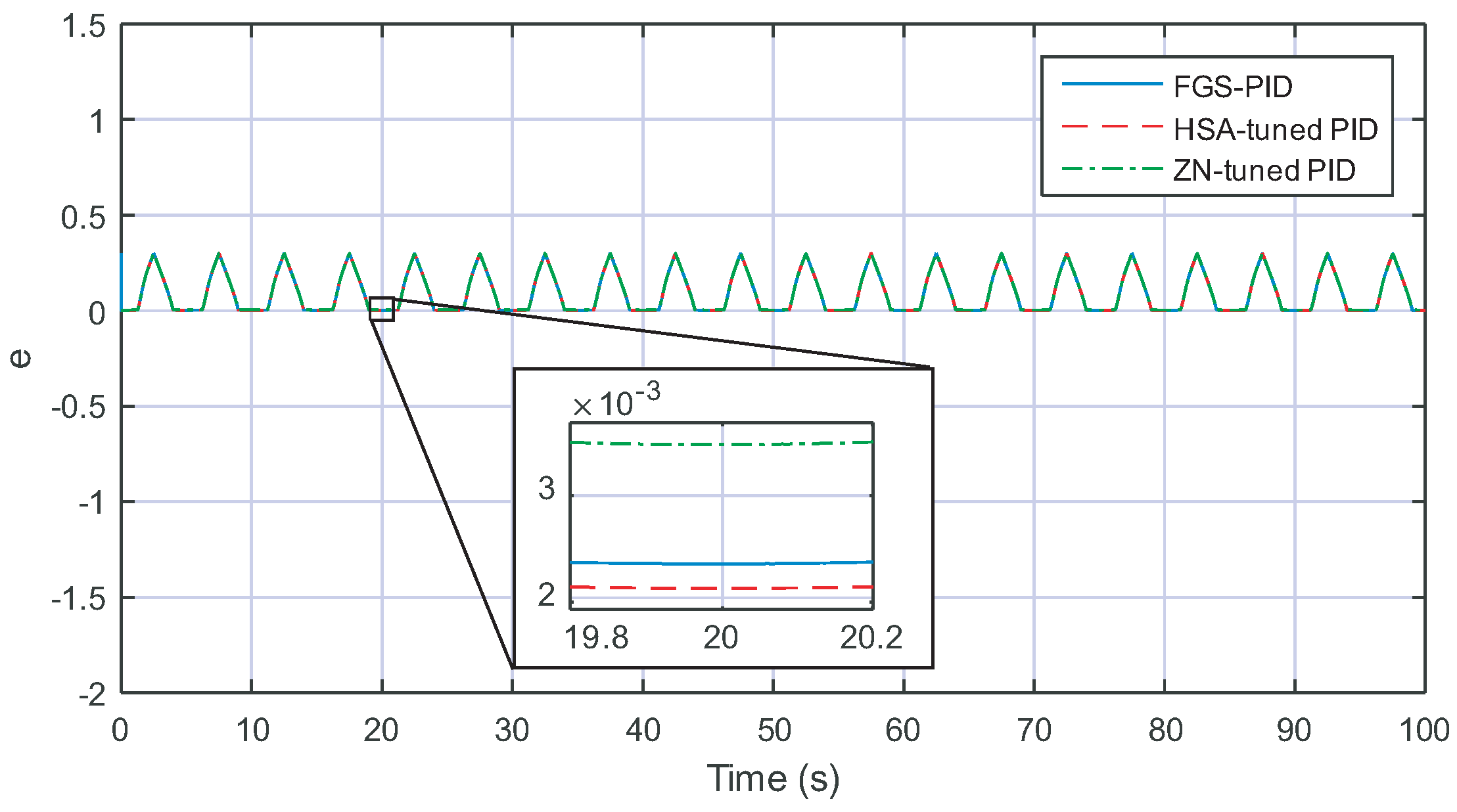
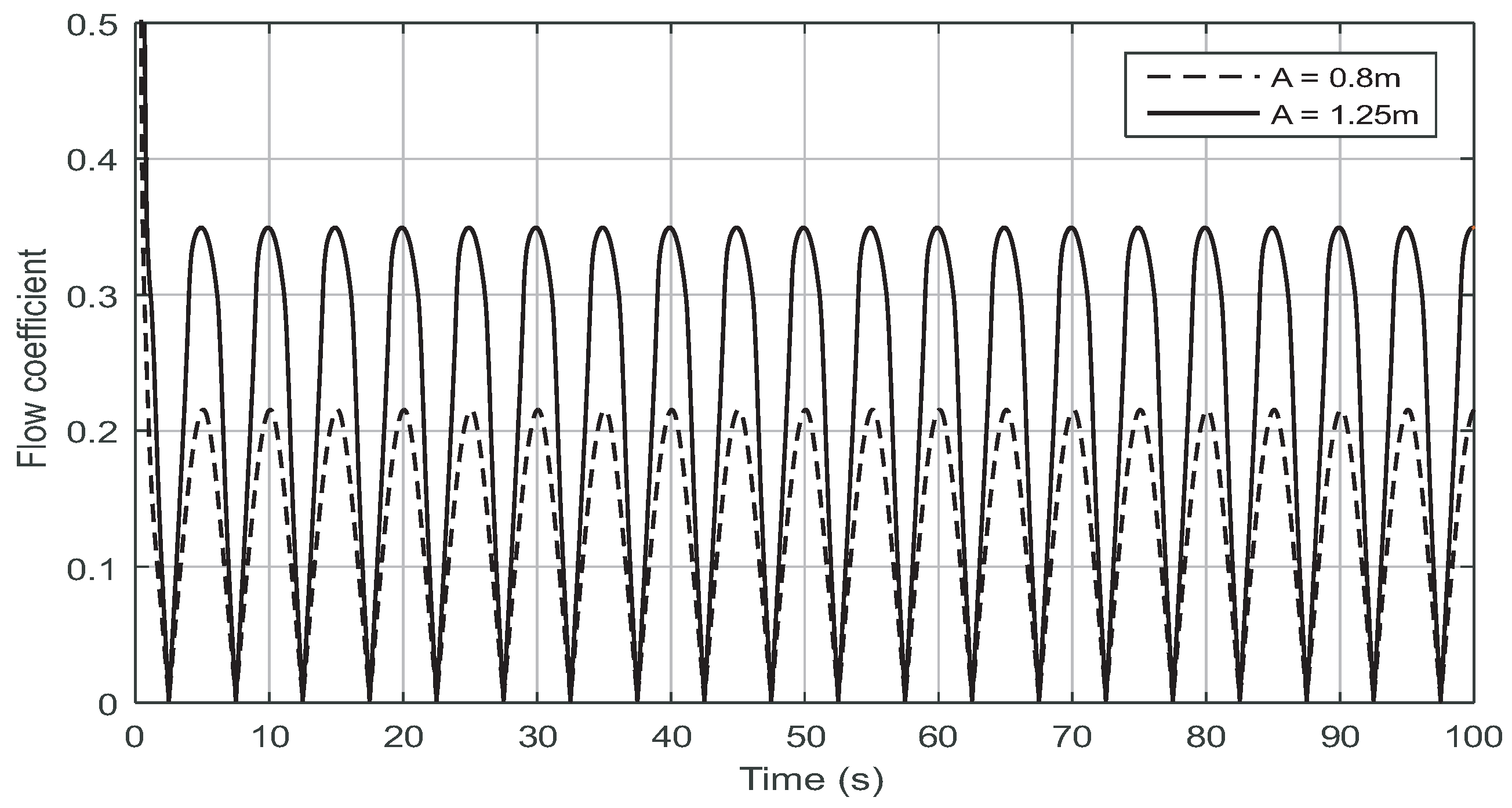
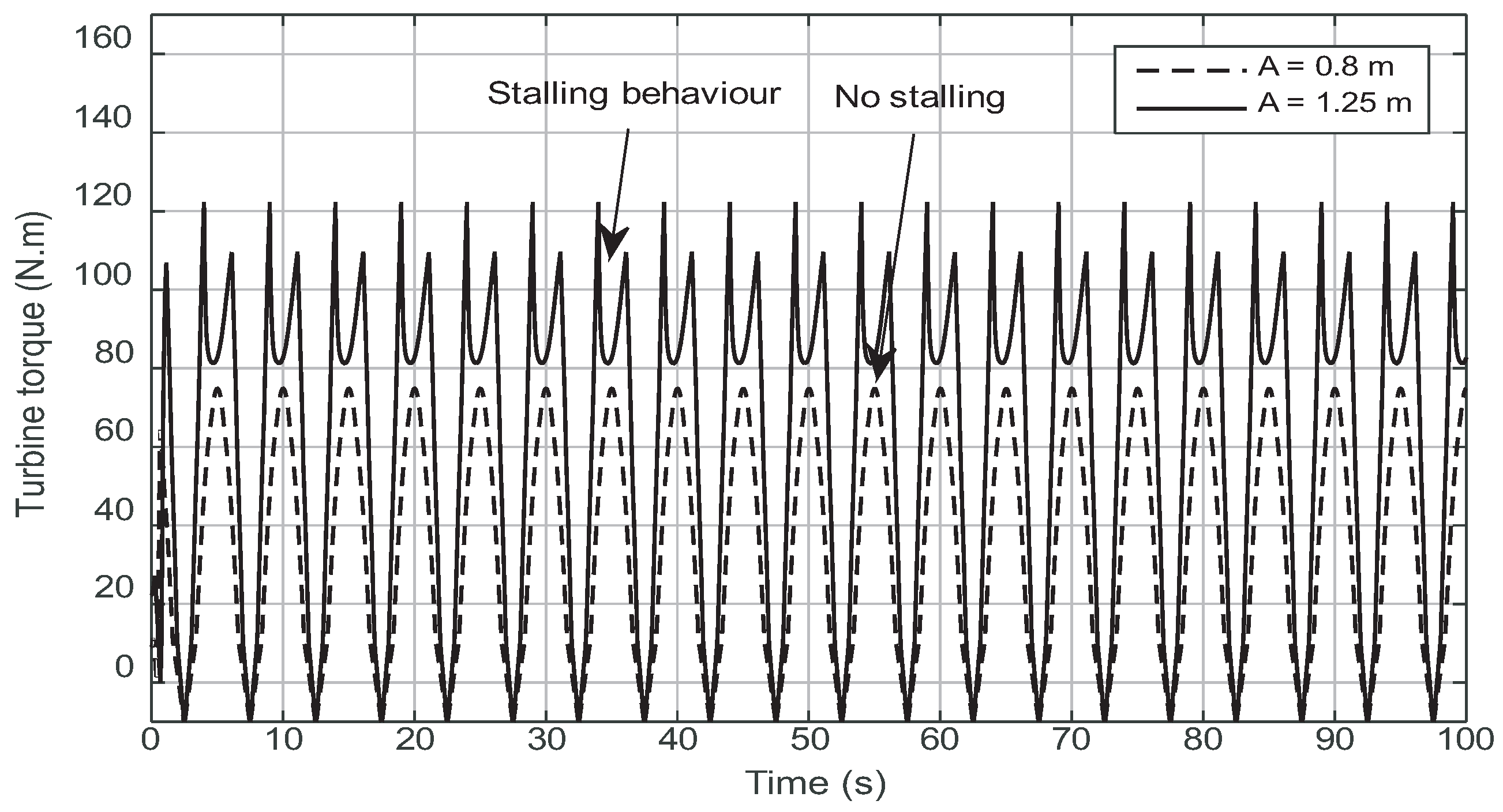
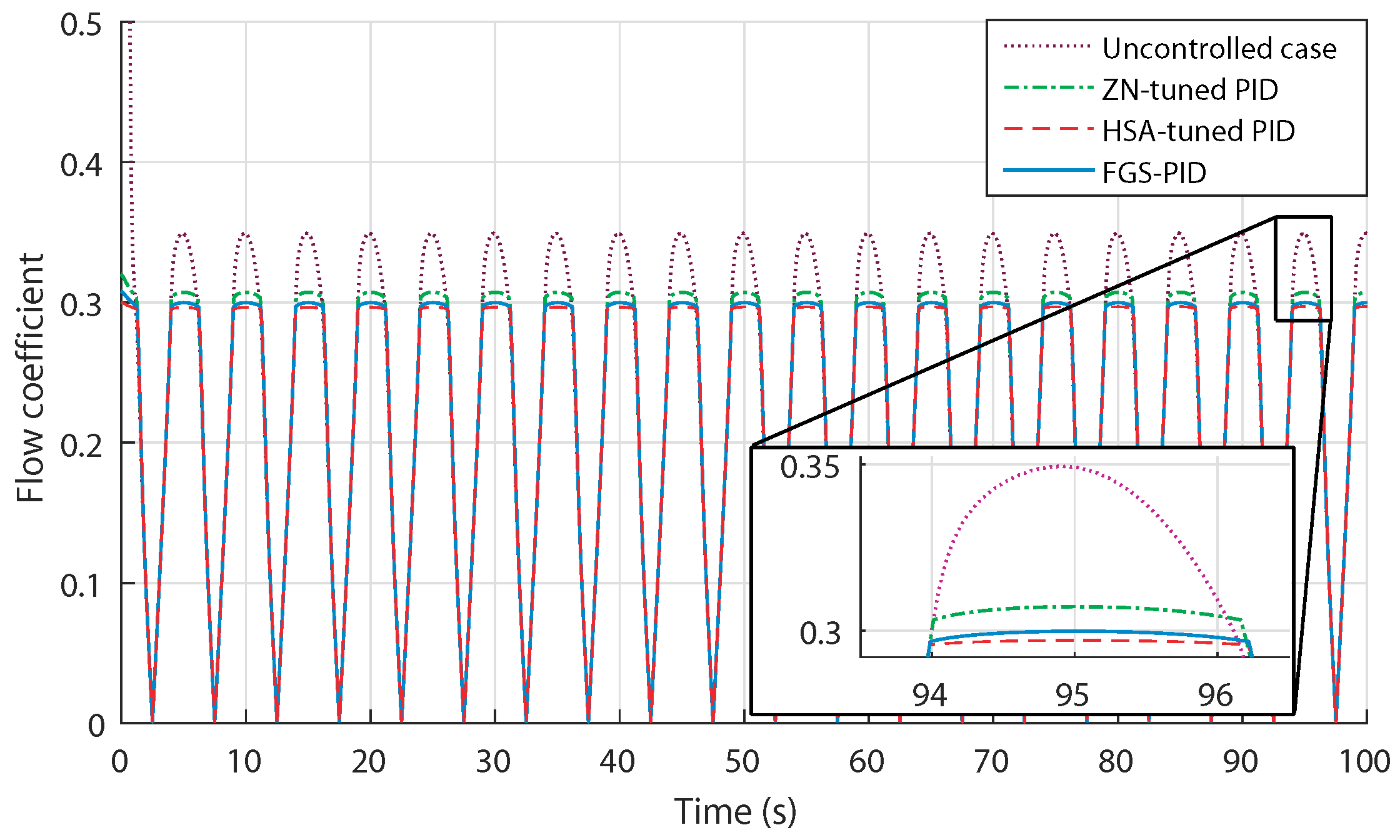
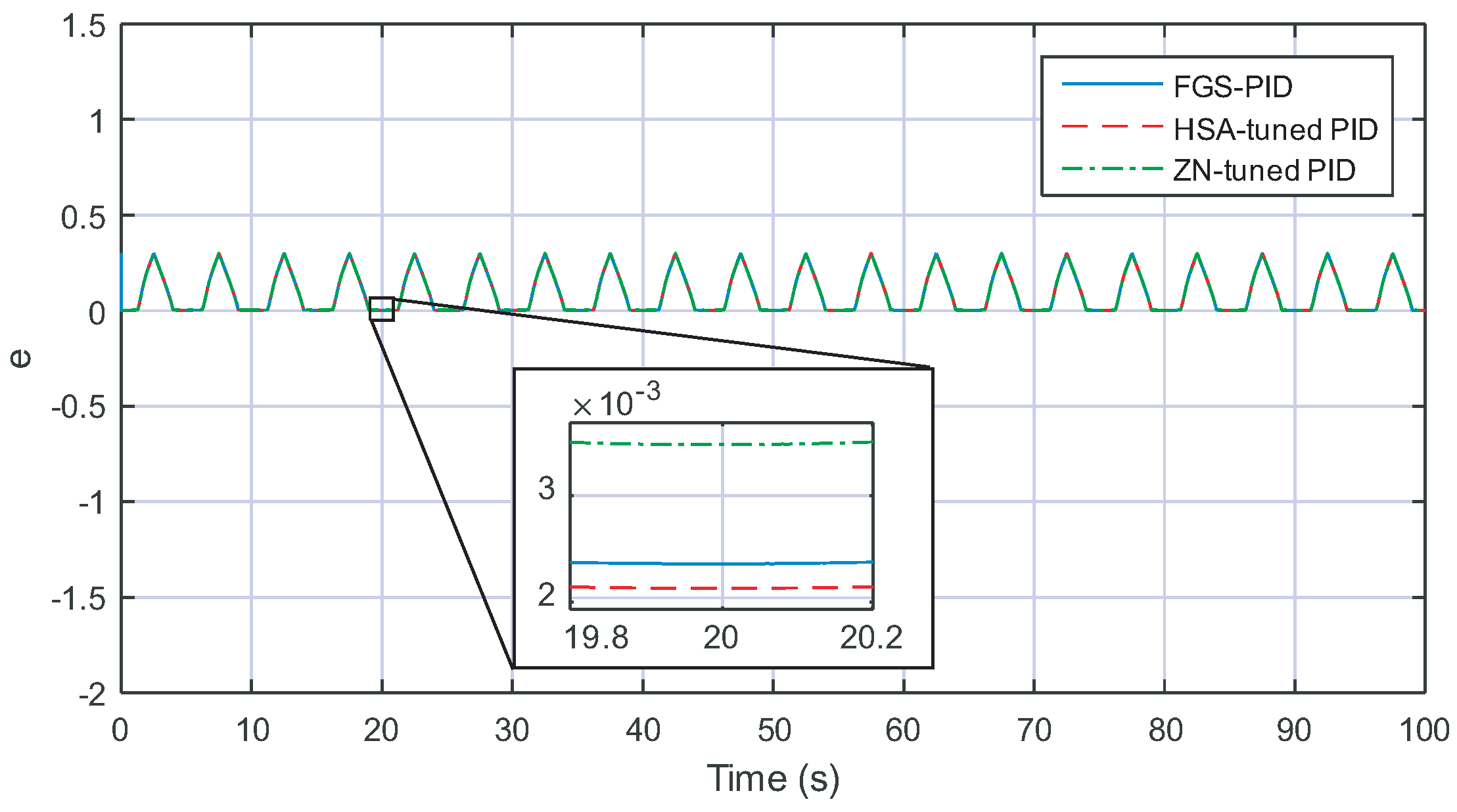
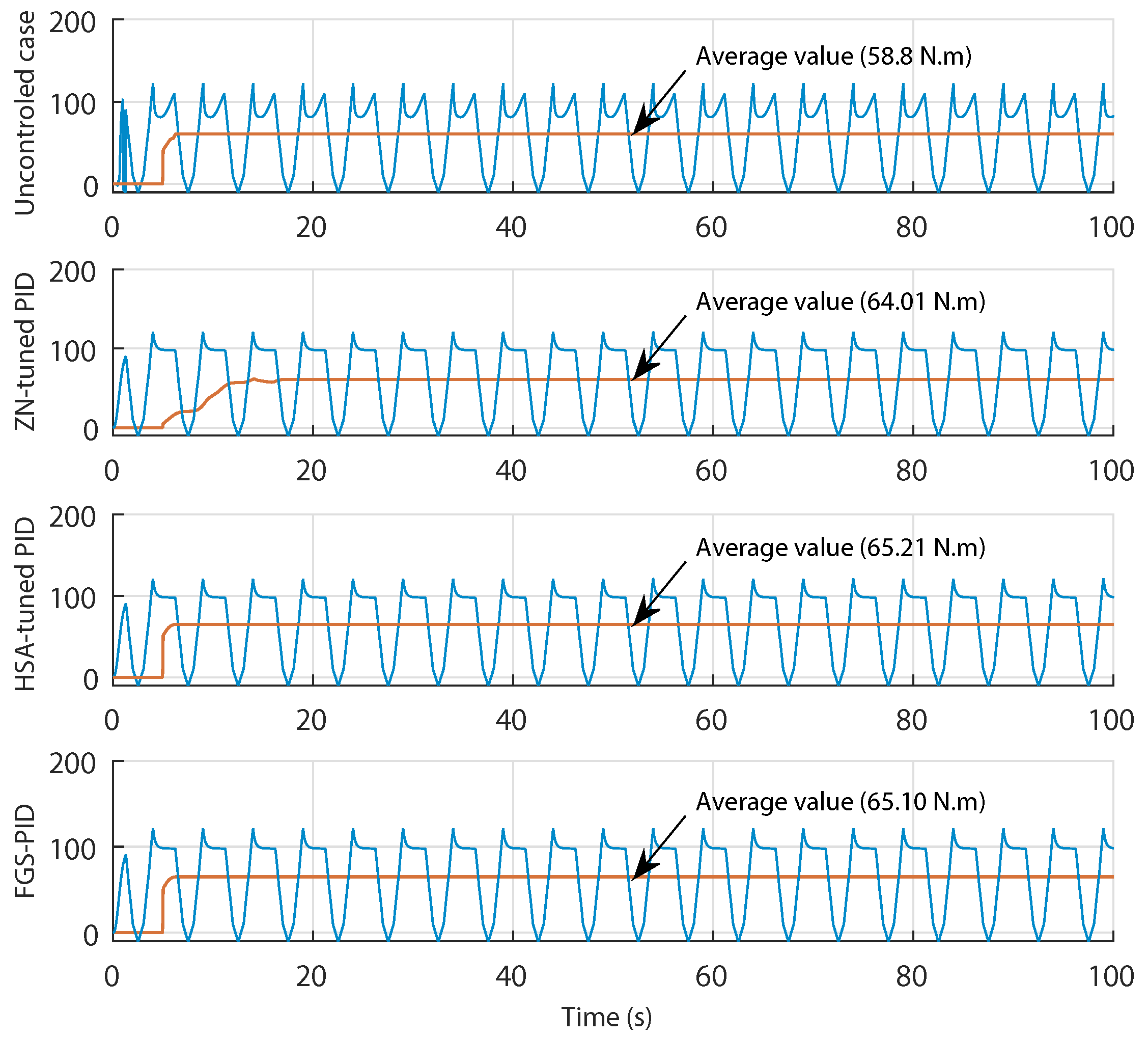
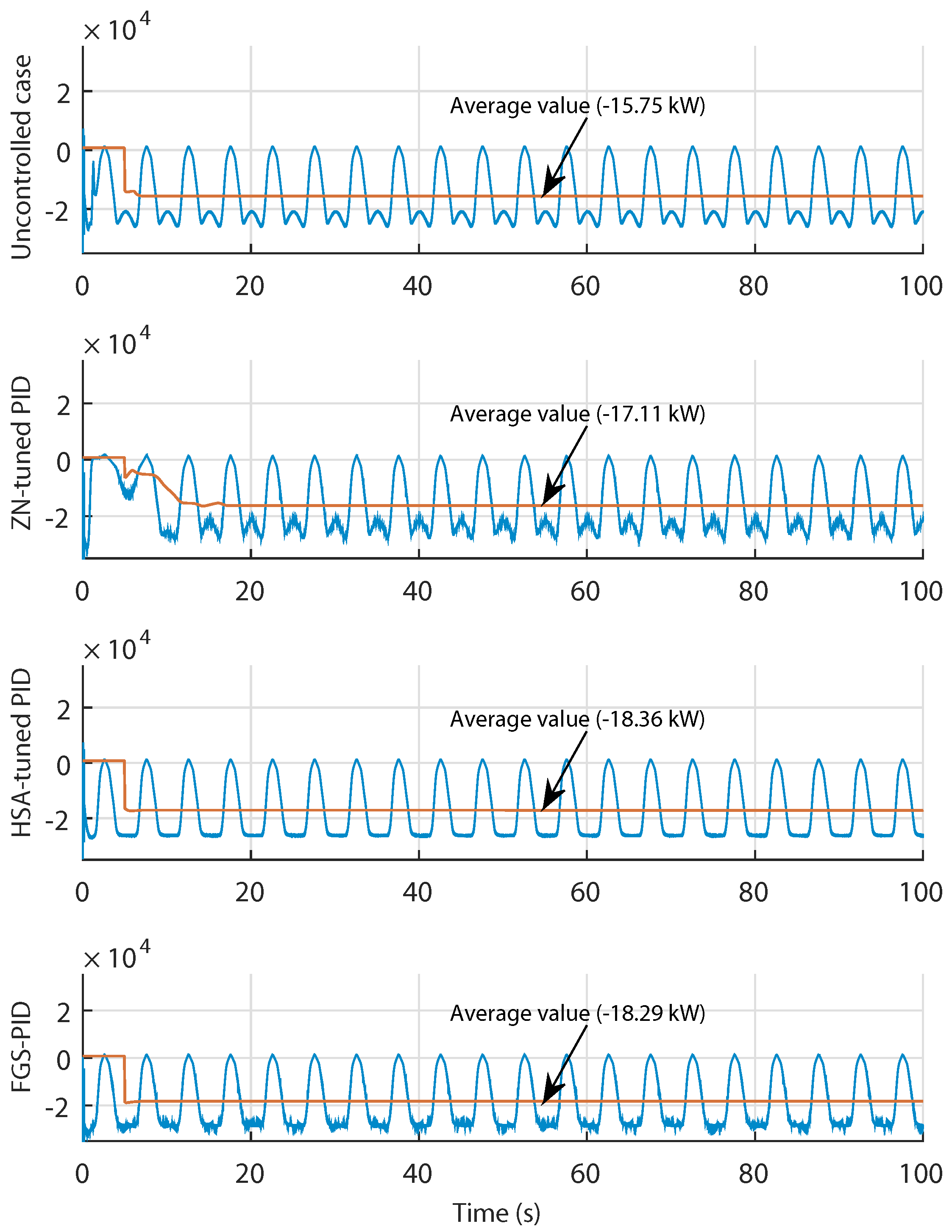
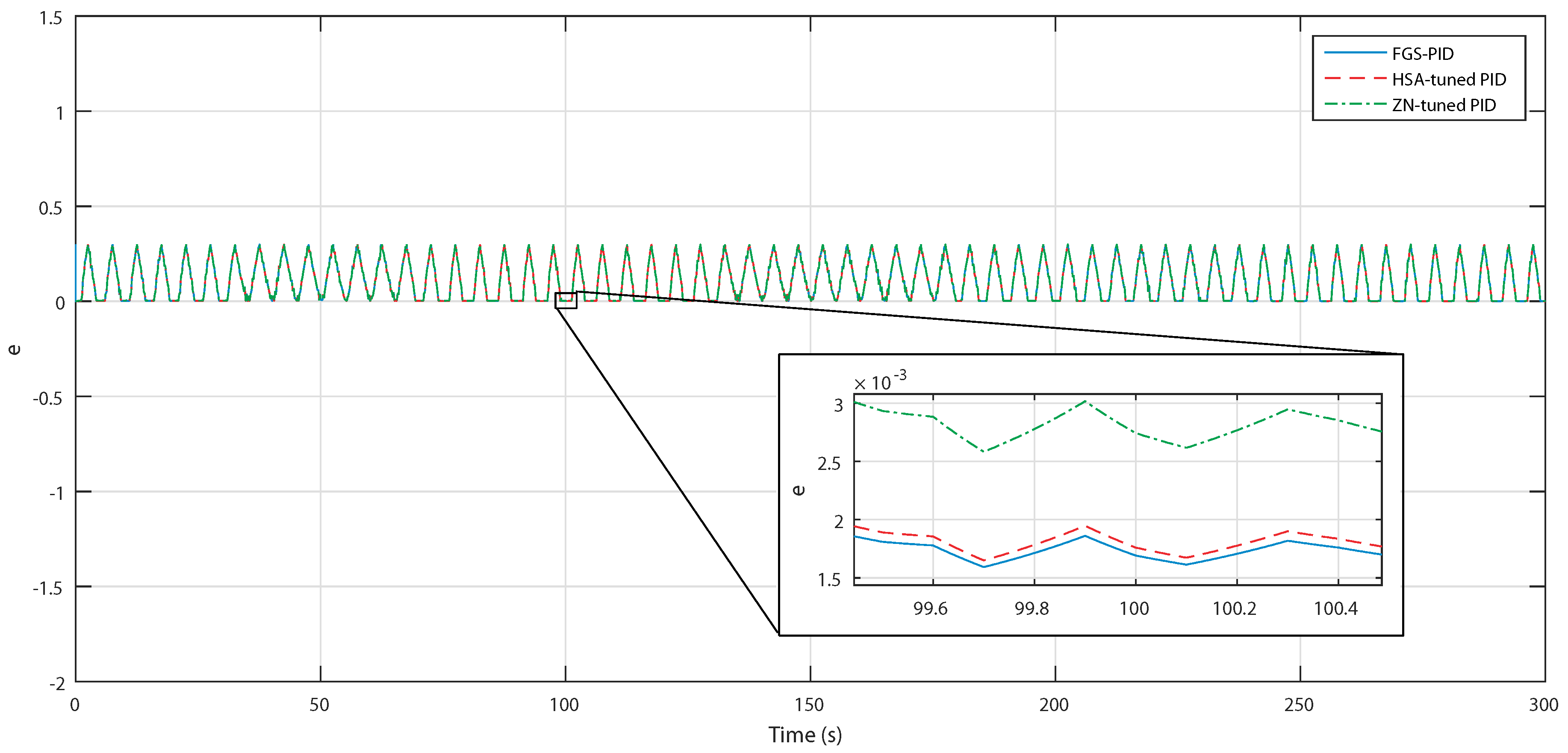
6.2. Performance in Regular Waves
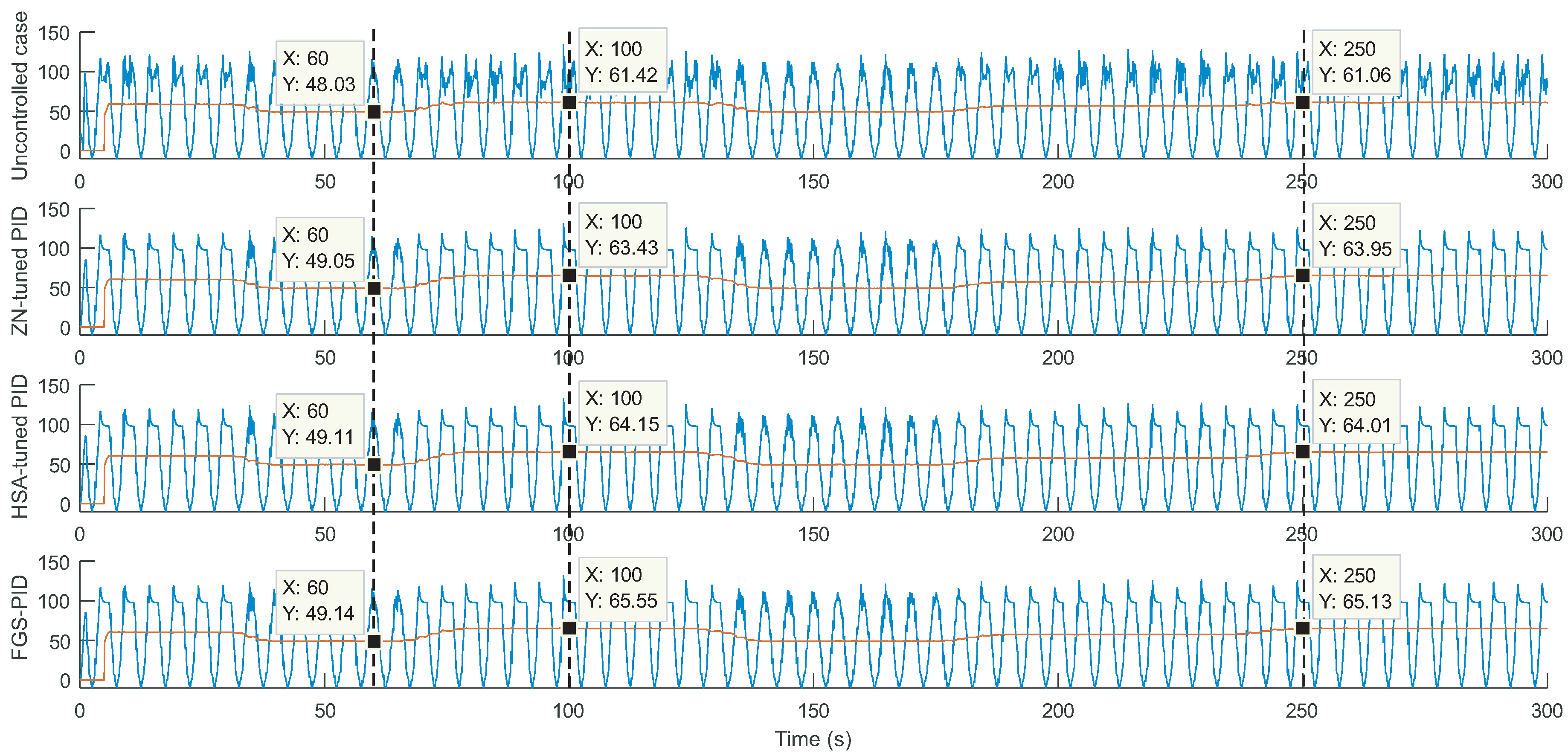
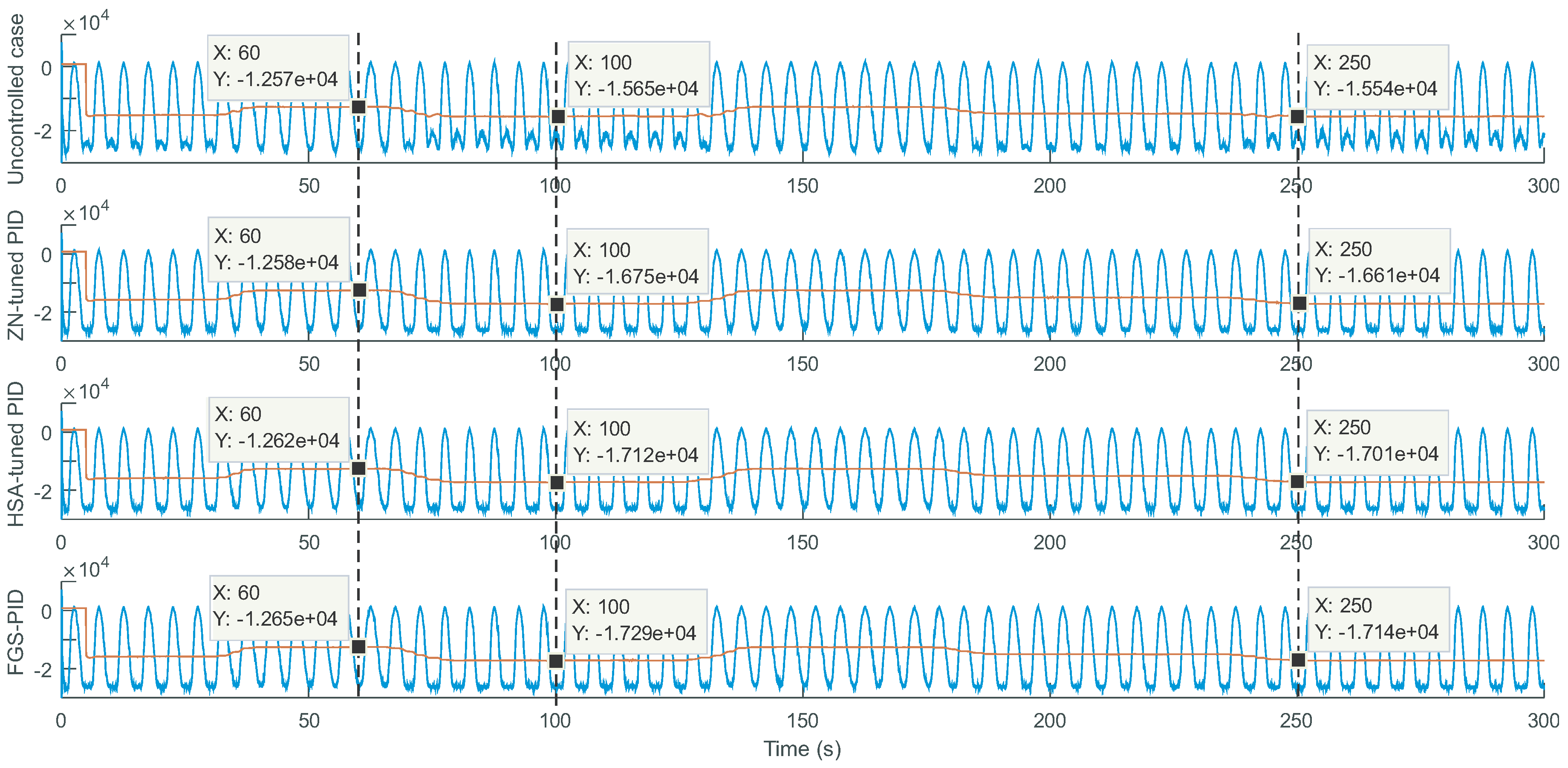
6.3. Performance in Irregular Waves
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alamir, M.; Fiacchini, M.; Chabane, S.B.; Bacha, S.; Kovaltchouk, T. Active power control under Grid Code constraints for a tidal farm. In Proceedings of the 2016 Eleventh International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 6–8 April 2016; pp. 1–7. [Google Scholar]
- Magagna, D.; Uihlein, A. 2014 JRC Ocean Energy Status Report; European Commission: Luxembourg, 2015. [Google Scholar]
- Stopa, J.E.; Cheung, K.F.; Chen, Y.L. Assessment of wave energy resources in Hawaii. Renew. Energy 2011, 36, 554–567. [Google Scholar] [CrossRef]
- Liberti, L.; Carillo, A.; Sannino, G. Wave energy resource assessment in the Mediterranean, the Italian perspective. Renew. Energy 2011, 50, 938–949. [Google Scholar] [CrossRef]
- Kumar, V.S.; Anoop, T.R. Wave energy resource assessment for the Indian shelf seas. Renew. Energy 2015, 76, 212–219. [Google Scholar] [CrossRef]
- Lopez, M.; Veigas, M.; Iglesias, G. On the wave energy resource of Peru. Energy Convers. Manag. 2015, 90, 34–40. [Google Scholar] [CrossRef]
- Scottish Energy Association. Available online: http://www.wearesea.com/ (accessed on 7 October 2018).
- Falcão, A.F.O.; Rodrigues, R.J.A. Stochastic modeling of OWC wave power plant performance. Appl. Ocean Res. 2002, 24, 59–71. [Google Scholar] [CrossRef]
- Torre-Enciso, Y.; Ortubia, I.; López de Aguileta, L.I.; Marqués, J. Mutriku Wave Power Plant: From the thinking out to the reality. In Proceedings of the 8th European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009; pp. 319–329. [Google Scholar]
- Tease, W.K.; Lees, J.; Hall, A. Advances in oscillating water column air turbine development. In Proceedings of the 7th European Wave and Tidal Energy Conference, Porto, Portugal, 11–14 September 2007. [Google Scholar]
- Raghunathan, S. Performance of the Wells self-rectifying turbine. Aeronaut. J. 1985, 89, 369–379. [Google Scholar]
- Raghunathan, S. The wells air turbine for wave energy conversion. Prog. Aerosp. Sci. 1995, 31, 335–386. [Google Scholar] [CrossRef]
- M’zoughi, F.; Bouallègue, S.; Ayadi, M. Modeling and SIL simulation of an oscillating water column for ocean energy conversion. In Proceedings of the 2015 6th International Renewable Energy Congress (IREC), Sousse, Tunisia, 24–26 March 2015; pp. 1–6. [Google Scholar]
- M’zoughi, F.; Bouallègue, S.; Ayadi, M.; Garrido, A.J.; Garrido, I. Modeling and airflow control of an oscillating water column for wave power generation. In Proceedings of the 2017 4th International Conference on Control, Decision and Information Technologies (CoDIT), Barcelona, Spain, 5–7 April 2017; pp. 938–943. [Google Scholar]
- Sobey, R.; Goodwin, P.; Thieke, R.; Westberg, R.J., Jr. Application of Stokes, Cnoidal, and Fourier wave theories. J. Waterw. Port Coast. Ocean Eng. 1987, 113, 565–587. [Google Scholar] [CrossRef]
- Tromans, P.S.; Anaturk, A.R.; Hagemeijer, P. A new model for the kinematics of large ocean waves-application as a design wave. In Proceedings of the First International Offshore and Polar Engineering Conference, Edinburgh, UK, 11–16 August 1991. [Google Scholar]
- Chadwick, A.; Morfett, J.; Borthwick, M. Hydraulics in Civil and Environmental Engineering; Spon Press: London, UK, 2004. [Google Scholar]
- Garrido, A.J.; Otaola, E.; Garrido, I.; Lekube, J.; Maseda, F.J.; Liria, P.; Mader, J. Mathematical Modeling of Oscillating Water Columns Wave-Structure Interaction in Ocean Energy Plants. Math. Probl. Eng. 2015, 2015, 727982. [Google Scholar] [CrossRef]
- Le Roux, J.P. An extension of the Airy theory for linear waves into shallow water. Coast. Eng. 2008, 55, 295–301. [Google Scholar] [CrossRef]
- Sarmento, A.J.N.A.; Falcão, A.F.D.O. Wave generation by an oscillating surface-pressure and its application in wave-energy extraction. J. Fluid Mech. 1985, 150, 467–485. [Google Scholar] [CrossRef]
- Falcao, A.F.D.O.; Justino, P.A.P. OWC wave energy devices with air flow control. Ocean Eng. 1999, 26, 1275–1295. [Google Scholar] [CrossRef]
- M’zoughi, F.; Bouallègue, S.; Garrido, A.J.; Garrido, I.; Ayadi, M. Stalling-free Control Strategies for Oscillating-Water-Column-based Wave Power Generation Plants. IEEE Trans. Energy Convers. 2018, 33, 209–222. [Google Scholar] [CrossRef]
- M’zoughi, F.; Bouallègue, S.; Garrido, A.J.; Garrido, I.; Ayadi, M. Water Cycle Algorithm-based Airflow Control for an Oscillating Water Column-based Wave Generation Power Plant. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 2018. [Google Scholar] [CrossRef]
- Lekube, J.; Garrido, A.J.; Garrido, I.; Otaola, E. Output Power Improvement in Oscillating Water Column-based Wave Power Plants. Revista Iberoamericana de Automática e Informática Industrial 2018, 15, 145–155. [Google Scholar] [CrossRef]
- Falcão, A.F.O.; Gato, L.M.C. Air Turbines. In Comprehensive Renewable Energy; Sayigh, A., Ed.; 8: Ocean Energy; Elsevier: Oxford, UK, 2012; pp. 111–149. [Google Scholar] [CrossRef]
- López, I.; Andreu, J.; Ceballos, S.; de Alegría, I.M.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar] [CrossRef]
- Setoguchi, T.; Takao, M. Current status of self rectifying air turbines for wave energy conversion. Energy Convers. Manag. 2006, 47, 2382–2396. [Google Scholar] [CrossRef]
- O’Sullivan, D.L.; Lewis, A. Generator selection and comparative performance in offshore oscillating water column. IEEE Trans. Energy Convers. 2011, 26, 603–614. [Google Scholar] [CrossRef]
- Alberdi, M.; Amundarain, M.; Garrido, A.J.; Garrido, I.; Casquero, O.; De la Sen, M. Complementary control of oscillating water column-based wave energy conversion plants to improve the instantaneous power output. IEEE Trans. Energy Convers. 2011, 26, 1021–1032. [Google Scholar] [CrossRef]
- Muller, S.; Diecke, M.; De Donker, R.W. Doubly fed induction generator systems for wind turbines. IEEE Ind. Appl. Mag. 2002, 8, 26–33. [Google Scholar] [CrossRef]
- Ledesma, P.; Usaola, J. Doubly fed induction generator model for transient stability analysis. IEEE Trans. Energy Convers. 2005, 20, 388–397. [Google Scholar] [CrossRef]
- M’zoughi, F.; Garrido, A.J.; Garrido, I.; Bouallègue, S.; Ayadi, M. Sliding Mode Rotational Speed Control of an Oscillating Water Column-based Wave Generation Power Plants. In Proceedings of the 2018 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 1263–1270. [Google Scholar]
- Amundarain, M.; Alberdi, M.; Garrido, A.J.; Garrido, I. Modeling and simulation of wave energy generation plants: Output power control. IEEE Trans. Ind. Electron. 2011, 58, 105–117. [Google Scholar] [CrossRef]
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A review of the state of the art of power electronics for wind turbines. IEEE Trans. Power Electron. 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Fletcher, J.; Yang, J. Introduction to the Doubly-Fed Induction Generator for Wind Power Applications. In Paths to Sustainable Energy; INTECH Open Access Publisher: London, UK, 2010. [Google Scholar] [Green Version]
- Lei, Y.; Mullane, A.; Lightbody, G.; Yacamini, R. Modeling of the wind turbine with a doubly fed induction generator for grid integration studies. IEEE Trans. Energy Convers. 2006, 21, 257–264. [Google Scholar] [CrossRef]
- Bouallègue, S.; Haggège, J.; Benrejeb, M. A new method for tuning PID-type fuzzy controllers using particle swarm optimization. In Fuzzy Controllers-Recent Advances in Theory and Applications; InTech.: London, UK, 2012. [Google Scholar]
- Bouallègue, S.; Haggège, J.; Ayadi, M.; Benrejeb, M. PID-type fuzzy logic controller tuning based on particle swarm optimization. Eng. Appl. Artif. Intell. 2012, 25, 484–493. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the 6th International Symposium on micro Machine and Human Science MHS’95, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Legowski, A.; Niezabitowski, M. Robot path control based on PSO with fractional-order velocity. In Proceedings of the International Conference on Robotics and Automation Engineering (ICRAE), Jeju Island, Korea, 27–29 August 2016; pp. 21–25. [Google Scholar]
- Zotes, F.A.; Santos Penas, M. Heuristic Optimization of Interplanetary Trajectories in Aerospace Missions. Revista Iberoamericana de Automatica e Informatica Industrial 2017, 14, 1–15. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The Particle Swarm-Explosion, Stability, and Convergence in a Multidimensional Complex Space. IEEE Trans. Evolut. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Bouallègue, S.; Haggège, J.; Benrejeb, M. Particle Swarm Optimization-Based Fixed-Structure H∞ Control Design. Int. J. Control Autom. Syst. 2011, 9, 258–266. [Google Scholar] [CrossRef]
- Eskandar, H.; Sadollah, A.; Bahreininejad, A.; Hamdi, M. Water cycle algorithm—A novel metaheuristic optimization method for solving constrained engineering optimization problems. Comput. Struct. 2012, 30, 151–166. [Google Scholar] [CrossRef]
- Pahnehkolaei, S.M.A.; Alfi, A.; Sadollah, A.; Kim, J.H. Gradient-based Water Cycle Algorithm with evaporation rate applied to chaos suppression. Appl. Soft Comput. 2017, 30, 420–440. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Wang, X.; Gao, X.Z.; Zenger, K. An Introduction to Harmony Search Optimization Method; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Gao, X.Z.; Govindasamy, V.; Xu, H.; Wang, X.; Zenger, K. Harmony search method: Theory and applications. Comput. Intel. Neurosci. 2015, 2015, 39–48. [Google Scholar] [CrossRef]
- M’zoughi, F.; Bouallègue, S.; Ayadi, M.; Garrido, A.J.; Garrido, I. Harmony Search Algorithm-based Airflow Control of an Oscillating Water Column-based Wave Generation Power Plants. In Proceedings of the 2018 International Conference on Advanced Systems and Electric Technologies (IC_ASET), Hammamet, Tunisia, 22–25 March 2018; pp. 249–254. [Google Scholar]
- Zaho, Z.Y.; Tomizuka, M.; Isaka, S. Fuzzy Gain Scheduling of PID Controllers. IEEE Trans. Syst. Man Cybern. 1993, 23, 1392–1398. [Google Scholar]
- Tursini, M.; Parasiliti, F.; Zhang, D. Real-time gain tuning of PI controllers for high-performance PMSM drives. IEEE Trans. Ind. Appl. 2002, 38, 1018–1026. [Google Scholar] [CrossRef]
- Dounis, A.I.; Kofinas, P.; Alafodimos, C.; Tseles, D. Adaptive fuzzy gain scheduling PID controller for maximum power point tracking of photovoltaic system. Renew. Energy 2013, 60, 202–214. [Google Scholar] [CrossRef]
- Bedoud, K.; Ali-rachedi, M.; Bahi, T.; Lakel, R. Adaptive fuzzy gain scheduling of PI controller for control of the wind energy conversion systems. Energy Procedia 2015, 74, 211–225. [Google Scholar] [CrossRef]
- Ziegler, J.G.; Nichols, N.B. Optimum settings for automatic controllers. Trans. ASME 1942, 64, 759–765. [Google Scholar] [CrossRef]
- Aström, K.J.; Hägglund, T. Advanced PID Control; ISA—The Instrumentation, Systems and Automation Society: Research Triangle Park, NC, USA, 2006. [Google Scholar]
- Hang, C.C.; Aström, K.J.; Ho, W.K. Refinements of the Ziegler-Nichols tuning formula. IEE Proc. D Control Theory Appl. 1991, 138, 111–118. [Google Scholar] [CrossRef]
- Wang, Q.G.; Lee, T.H.; Fung, H.W.; Bi, Q.; Zhang, Y. PID tuning for improved performance. IEEE Trans. Control Syst. Technol. 1999, 7, 457–465. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | ||||||
|---|---|---|---|---|---|---|
| NB | N | Z | P | PB | ||
| NB | NB | NB | NB | N | Z | |
| N | NB | N | N | N | Z | |
| e | Z | NB | N | Z | P | PB |
| P | Z | P | P | P | PB | |
| PB | Z | P | PB | PB | PB | |
| e | ||||||
|---|---|---|---|---|---|---|
| NB | N | Z | P | PB | ||
| NB | PB | PB | PB | N | NB | |
| N | PB | P | P | Z | NB | |
| e | Z | P | P | Z | N | NB |
| P | Z | P | N | N | NB | |
| PB | Z | N | NB | NB | NB | |
| e | ||||||
|---|---|---|---|---|---|---|
| NB | N | Z | P | PB | ||
| NB | NB | NB | NB | P | PB | |
| N | N | N | N | Z | PB | |
| e | Z | Z | N | Z | P | PB |
| P | Z | N | P | P | PB | |
| PB | Z | P | PB | PB | PB | |
| Capture Chamber | Wells Turbine | DFIG Generator |
|---|---|---|
| = 4.5 m | n = 5 | = 18.45 kW |
| = 4.3 m | b = 0.21 m | = 400 V |
| = 1.19 kg/m | l = 0.165 m | = 50 Hz |
| = 1029 kg/m | r = 0.375 m | |
| a = 0.4417 m | = 0.5968 | |
| = 0.6258 | ||
| = 0.0003495 H | ||
| = 0.324 H | ||
| = 0.324 H |
| Algorithm | Best | Mean | Worst | S.D. |
|---|---|---|---|---|
| PSO-In | 8.092 | 8.357 | 11.743 | 1.692 |
| FPSOMA | 8.001 | 8.321 | 9.864 | 1.468 |
| WCA | 4.712 | 6.854 | 8.131 | 1.586 |
| HSA | 4.638 | 5.526 | 7.728 | 1.331 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
M’zoughi, F.; Garrido, I.; Bouallègue, S.; Ayadi, M.; Garrido, A.J. Intelligent Airflow Controls for a Stalling-Free Operation of an Oscillating Water Column-Based Wave Power Generation Plant. Electronics 2019, 8, 70. https://doi.org/10.3390/electronics8010070
M’zoughi F, Garrido I, Bouallègue S, Ayadi M, Garrido AJ. Intelligent Airflow Controls for a Stalling-Free Operation of an Oscillating Water Column-Based Wave Power Generation Plant. Electronics. 2019; 8(1):70. https://doi.org/10.3390/electronics8010070
Chicago/Turabian StyleM’zoughi, Fares, Izaskun Garrido, Soufiene Bouallègue, Mounir Ayadi, and Aitor J. Garrido. 2019. "Intelligent Airflow Controls for a Stalling-Free Operation of an Oscillating Water Column-Based Wave Power Generation Plant" Electronics 8, no. 1: 70. https://doi.org/10.3390/electronics8010070