1. Introduction
Passive sonar is an important system for underwater detection. It mainly receives underwater radiated noise to detect its target. Direction-of-arrival (DOA) estimation is a major task in underwater signal processing [
1], through which the sonar system can obtain the target position. In recent years, sparsity-based DOA estimation [
1,
2,
3,
4,
5] has attracted much attention since it can be applied under a low signal-to-noise ratio (SNR) condition in comparison with traditional DOA estimation methods [
1]. This characteristic helps the system work well even in a noisy environment [
6]. The sparsity-based method can be classified into the
lp-norm minimization method [
7,
8,
9] and the sparse Bayesian learning (SBL) method [
10,
11,
12,
13]. The
lp-norm-based method uses the
lp-norm to enforce sparsity with a well-tuned regularization parameter. On the contrary, SBL assigns a suitable prior for the signal and enforces sparsity by automatically estimating the model parameters, avoiding the choice of regularization parameter.
Wideband processing plays a fundamental role in underwater source localization. Most of the wideband SBL methods [
14,
15,
16,
17] make full use of the common sparsity profile across frequency bins by assigning Gaussian priors to signals with the same precision in all frequency bins. These methods are often implemented by expectation maximization [
18] or variational Bayesian inference (VBI) [
19,
20]. The matrix inverse is involved in each iteration, which increases the computational workload. To avoid this problem, Jiang et al. [
21] extend the fast relevance vector machine (Fast-RVM) [
22] to wideband conditions. As such, the method only updates one signal precision parameter in each iteration and avoids matrix inversion.
However, when strong interference (such as tow-vessel noise) is nearby the target with weak power, this strong interference will mask the target-of-interest. Under such a condition, the DOAs of the targets can hardly be obtained, leading to a significant challenge to weak target detection. Hence, DOA estimation in a strong interference environment is a tough problem.
To solve this problem, Refs. [
23,
24] reconstruct the interference subspace through eigen decomposition and remove it from the received data, thus decreasing the influence of the interference. Then, a traditional DOA estimation method, i.e., conventional beamforming (CBF) [
25], is applied to estimate DOAs. This is also regarded as a subspace-separation-based method. However, it is known that the main lobe of the CBF is wide. Hence, though the influence of interference is decreased, this method still suffers from low resolution.
Spatial filter is another useful tool to suppress interference. References [
26,
27] adopt the matrix filter (MF) [
28,
29] as preprocessor, and then a
lp-norm-based method is applied to estimate the DOAs from MF outputs, thus achieving high resolution. However, this kind of method suffers from a large computational workload and can hardly provide DOA estimates in real time. This high cost increases the computational pressure on the system, which prohibits its applications in practical signal processing. In contrast, References [
30,
31] use the CBF instead of MF to improve the computational efficiency, and the
lp-norm-based method is applied to estimate DOAs from beamformer power outputs (BPO). The performance degrades seriously when the interference is not sufficiently suppressed. Moreover, it also needs to tune the regularization parameter well.
To achieve high estimation precision in a strong interference environment, we have proposed a method named BPO-based SBL (SBL-BPO) in [
32]. Minimum variance distortionless response with diagonal loading (MVDR-DL) [
33] is applied to suppress interference, since it adaptively produces a deep nulling to the direction of the interference and can suppress this interference sufficiently. Then, a probabilistic model suitable for the BPO is established. On the basis of this, the VBI is applied to estimate DOAs from the BPO, avoiding tuning the regularization parameter. The simulation and experimental results have proven that the SBL-BPO achieves better performance than the existing methods in a strong interference environment. However, this method involves matrix inversion to update the signal covariance matrix in each iteration, which still brings some computational burden.
In this paper, the SBL-BPO is further modified to reduce the computational burden. The Fast-RVM [
22] is extended to the beam domain, and a sequence solution for the parameters in the BPO probabilistic model is provided. Unlike the SBL-BPO that updates all signal precision parameters in each iteration, the modified SBL-BPO (MSBL-BPO) only updates the single signal precision parameter that maximizes the increment of marginal distribution. In this manner, matrix inversion is avoided in each iteration, thus improving computational efficiency. Simulation and experimental results show that the MSBL-BPO maintains high estimation precision in a strong interference environment. At the same time, its computational workload is lower than other sparsity-based methods.
The following notations are used throughout this paper. , and denote the transpose, conjugate transpose and conjugate, respectively. and are vectors with diagonal elements of X as its elements and a diagonal matrix with x as its diagonal element, respectively. represents the real Gaussian distribution. is an identify matrix, and denotes the Hadamard product.
The rest of this paper is organized as follows.
Section 2 establishes the BPO model and BPO probabilistic model.
Section 3 presents the proposed MSBL-BPO method.
Section 4 and
Section 5 present the numerical simulations and experimental results, respectively.
Section 6 concludes this paper.
3. Proposed Method
The SBL-BPO method [
32] uses VBI for Equation (12). In this method, given
and
, the posterior distribution of
is as follows:
In this equation,
The estimate of
is expressed as
where
and
represent the
pth elements in
and the (
p,
p)th element in
, respectively. All signal precision parameters are updated as shown in Equation (15) at each iteration, and the method needs to compute the matrix inversion of
at each iteration, which increases the computational burden.
In this paper, we further modify the SBL-BPO to reduce the computational burden. The Fast-RVM [
22] is extended to beam domain, and a sequential solution for model (12) is provided to obtain DOA estimates. Instead of updating whole signal precision parameters in an iteration, the proposed method only adds, deletes or updates one entry in each iteration. The key problem is to estimate the entry in
, which can be performed through maximizing the following marginal distribution:
where
.
Equation (16) can be decomposed as [
21]:
In this equation,
and
, where
,
, and
,
is a vector composed by the entries in
expect
. To maximize
with respect to
, we differentiate
with respect to
and set it to zero. The result is as follows [
21]:
The increment of
caused by
in the
ith iteration is computed as follows:
where
is the estimate of
in the (
i−1)th iteration. A large
shows that a signal exists in the corresponding basis with a high probability, and this basis should be activated. Then, the entry of
corresponding to the largest
is updated:
where
is the index corresponding to the largest
. Assuming that
is the active basis set, then
- (1)
if , add to the active basis set,
- (2)
if , maintain the active basis set,
- (3)
if , delete from the active basis set.
The DOA estimation process is similar to that in [
21]. The main difference is that the model in the proposed method contains the noise power parameter. Hence,
and
are divided into two parts, as shown in Equations (14) and (17), respectively. Furthermore, the noise parameters are also updated during iteration. The modified update processing is shown as follows:
(1)
Initialization: Before estimation, all of the bases are assumed to be inactive. At this time,
,
,
,
,
, and
. By substituting these values into Equation (18),
can be obtained. The initialization of
is set to
where
is the index corresponding to the largest increment of
, computed by
. The active basis is set to
.
The covariance matrix and the mean of the signal are set to the following values:
where
and
.
Then, the initial noise parameter is given as follows. The posterior of the noise power is expressed as [
32]
In this equation,
is the estimate of
.
The parameter
is updated via maximizing the expected log-likelihood function, expressed as
where
represents the expectation with respect to
. After differentiating Equation (27) with respect to
and setting it to zero, the estimate of
is expressed as
In this manner, the noise parameters
,
, and
are set to the following values, respectively:
where
only contains the bases corresponding to the indexes in
.
,
, and
are set to
(2)
Adding a basis: If
, then
. The covariance matrix
is updated as follows:
where
. The values of
and
are updated by
,
, and
are updated by
where
.
(3)
Updating a basis: If
, then
. The covariance matrix
is updated as follows:
where
represents the
pth column of
,
,
represents the (
p,
p)th element in
, and
denotes a vector whose entries are all zero except that the
pth entry is 1. The
and
are updated by
where
and
represent the
pth elements in
and
, respectively. Based on this,
is estimated using Equation (35).
,
, and
are updated by
(4)
Deleting a basis: If
, then
is the set removing
from
. At this time,
With the substitution of Equation (40) into Equations (37)–(39), the update for each parameter can be completed.
Once the signal parameters have updated in an iteration, is updated by Equation (25), is obtained by substituting to Equation (26), and is updated by Equation (28).
The iteration is terminated when
for a small tolerance of
or a maximum number of iterations of
is reached. Once the iteration converges, the estimated spectrum
can be obtained by
A summary of the MSBL-BPO is provided in Algorithm 1.
| Algorithm 1 Summary of the implementation of the MSBL-BPO |
| Input: , , , , |
Initialization: Initialize , , through Equations (21)–(23). Set , , , , , and using Equations (29)–(32). , and i = 0.
while and
Update i = i + 1.
Compute using Equation (18).
Compute the increment caused by using Equation (19), and record the index corresponding to the largest as .
Update using Equation (20).
if
.
Update , , , , , and using Equations (33), (34) and (36).
end if
if
.
Update , , , , , and using Equations (37)–(39).
end if
if
Update by removing from .
Compute using Equation (40).
Update , , , , , and by substituting Equation (40) into Equations (37)–(39).
end if
Update using Equation (35).
Update , , and using Equations (25), (26) and (28), respectively.
end while |
| Output: |
4. Simulation Results
In this section, the MSBL-BPO is compared with the SBL-BPO [
32], eigenanalysis-based adaptive interference suppression based CBF (EAAIS-CBF) [
24], and covariance-based fast SBL (C-FSBL) methods [
21]. The EAAIS-CBF is a subspace-separation-based method, and the C-FSBL is a method that extends the Fast-RVM to a vectorized covariance matrix. For all simulations, a uniform linear array with 32 sensors and 4 m spacing is considered. Two weak targets and a strong interference impinge on the array from −10°, −7° and 10° (90° is defined as the endfire direction). The frequency ranges of targets and interference are [90, 180] Hz. The sample frequency is 2 kHz. The received data are divided into
N blocks, with a length of 1000. Then, a 1000-point DFT is applied in each block, i.e., frequency resolution is 2 Hz. The sector-of-interest
used in MSBL-BPO and SBL-BPO is set to [−14, −2]°. The sector is divided with a step of 2° to obtain beam pointing angles. The coarse bearing range where the targets may exist is also set to [−14, −2]° in EAAIS-CBF. The C-FSBL estimates DOAs in whole space with a grid interval of 1° to ensure the inclusion of the bases of the signals in the dictionary matrix, while other methods search for the DOAs in
with a grid interval of 1°, since the signals out of
are suppressed. The tolerance
and the maximum number of iterations
are set to
and 3000, respectively. All simulations are performed in MATLAB on a PC with an Intel Core i7-6820HQ CPU and 32 GB RAM.
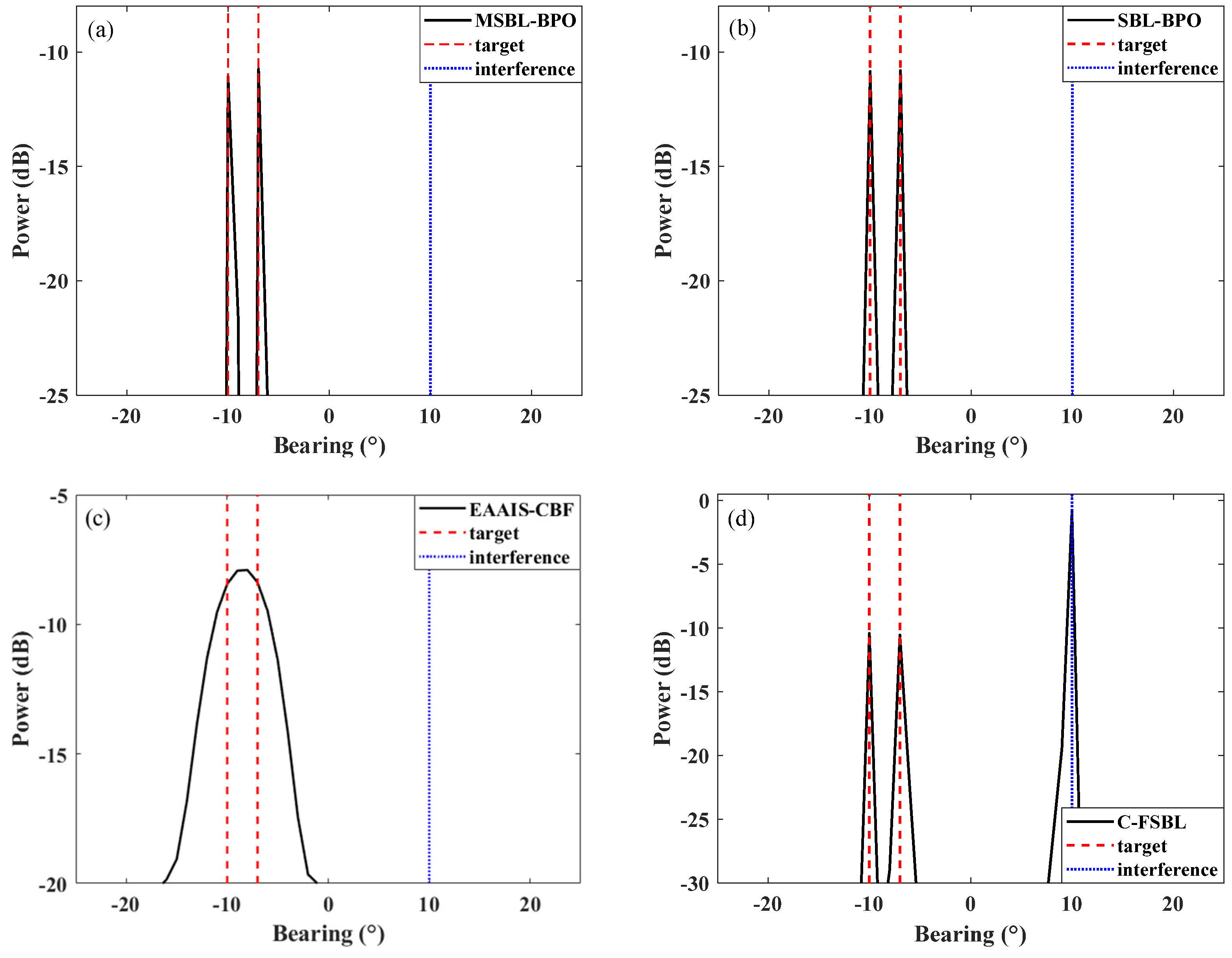
Figure 1 shows the spatial spectra of the abovementioned algorithms with SIR of −10 dB. The SNR and the number of snapshots
N are set to −10 dB and 50, respectively. Under such a condition, the MSBL-BPO, the SBL-BPO and the C-FSBL as super-resolution methods, can estimate the two directions of the targets. On the contrary, though the EAAIS-CBF can suppress the interference by removing the interference subspace from the covariance matrix, it still cannot resolve the directions of signals because of the wide main lobe, which results in low resolution.
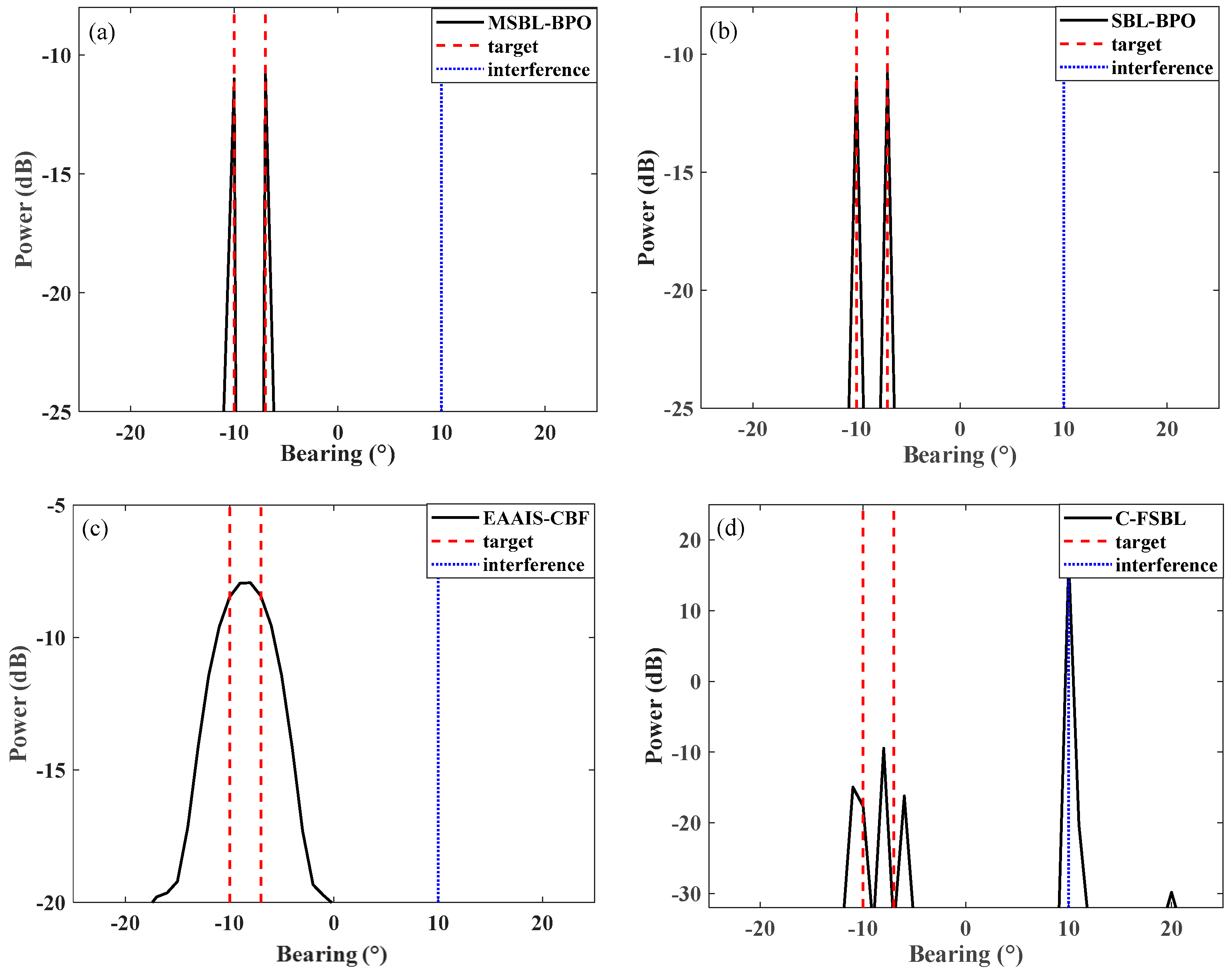
Then, the SIR increases to −30 dB.
Figure 2 shows the spatial spectra of the method considered above under such a condition. Obviously, the interference power increases with a decrease in SIR. Once again, the proposed method and the SBL-BPO use the MVDR-DL as preprocessor to suppress the interference. As such, they can maintain good performance when the interference power increases. The C-FSBL can estimate the direction of the interference. However, its performance is seriously affected by the strong interference in comparison with the result in
Figure 1d. The method experiences problems in resolving two directions of the targets. Furthermore, the EAAIS-CBF still cannot work under such a condition, mainly due to the low resolution.
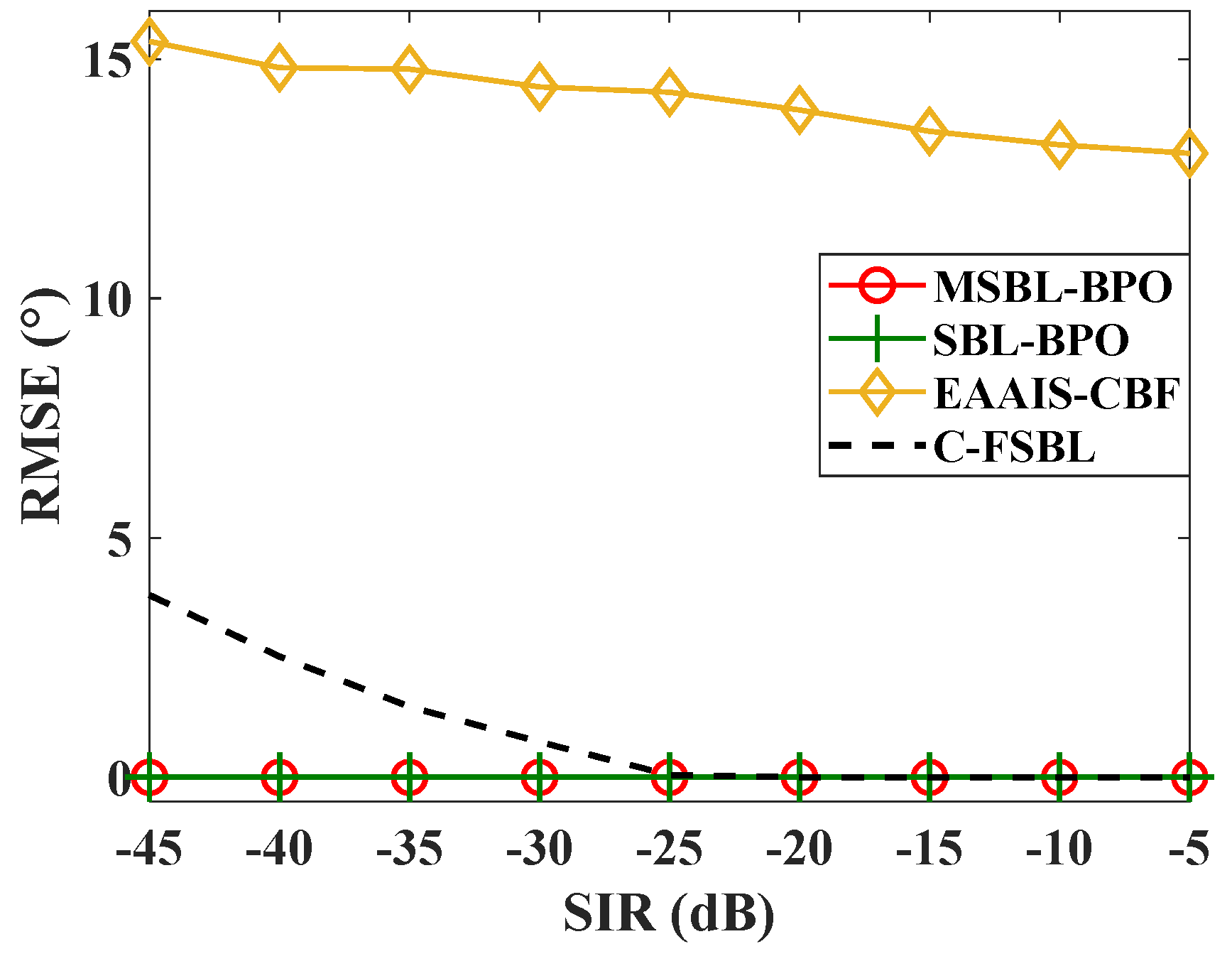
Subsequently, the estimation accuracy of the methods is compared under different SIR conditions, examined by the root-mean-square error (RMSE):
where
K and
W are the number of signals and the sum of the Monte Carlo runs, respectively.
K = 2 and
W = 200 in the simulations.
Figure 3 shows the RMSE of each method versus the SIR curve obtained by fixing the SNR and the number of snapshots
N to −10 dB and 50, respectively. It can be observed that the performance of the MSBL-BPO is comparable to that of the SBL-BPO. They provide stable DOA estimates as the interference power increases since the interference is sufficiently suppressed by the MVDR-DL and cannot affect the DOA estimation. However, the performance of the C-FSBL is affected by strong interference, and its estimation precision decreases when SIR is smaller than −25 dB. The RMSEs of EAAIS-CBF are larger than in other methods. This is mainly because that the main lobe of the CBF is wide and only a peak exists in the sector [−14, −2]°, as shown in
Figure 1c and
Figure 2c. The peak out of the sector is mistaken for the target, leading to a large bias.
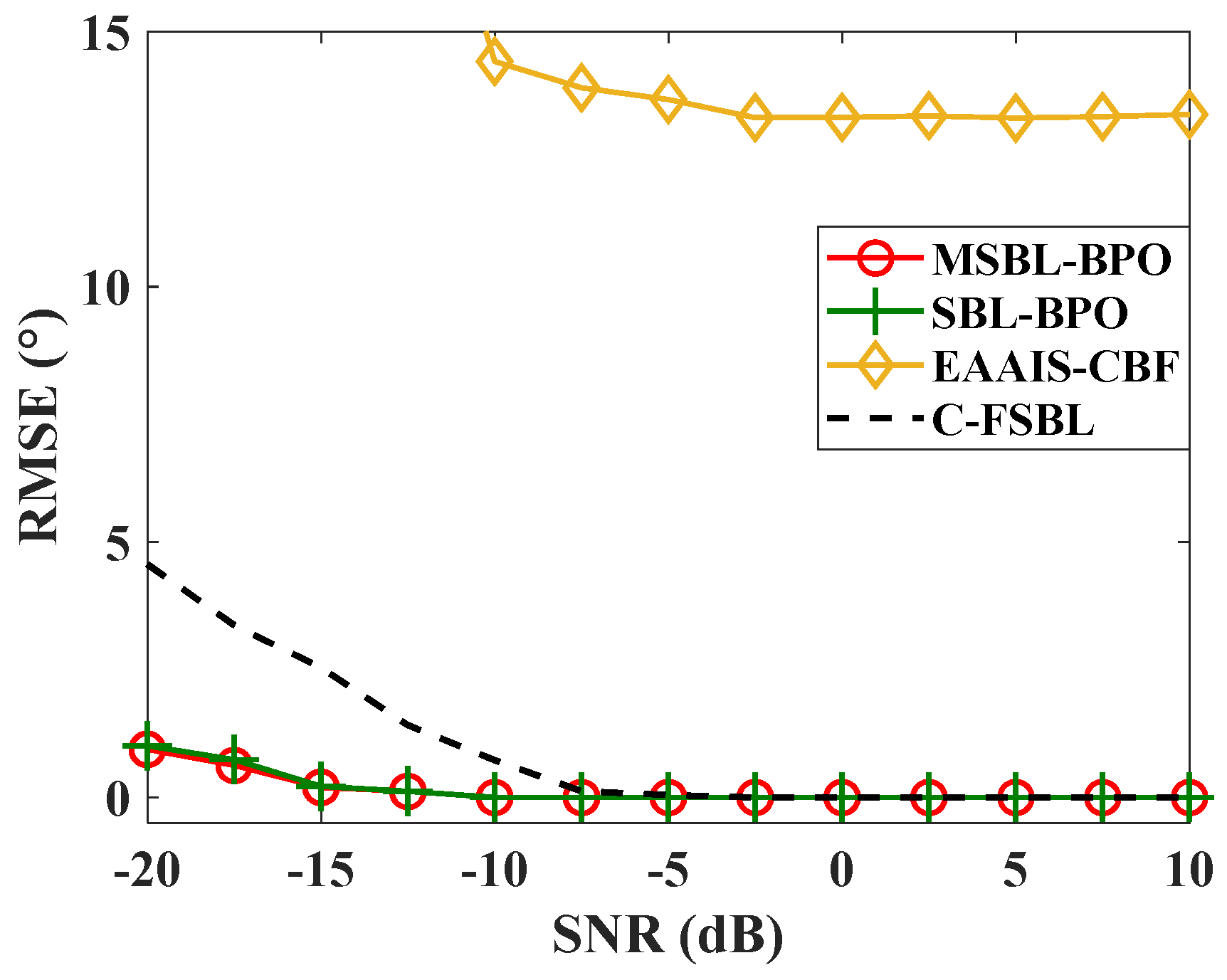
Figure 4 illustrates the RMSE of each method versus the SNR by fixing the SIR to −30 dB. Other parameters remain unchanged. The MSBL-BPO and the SBL-BPO use the MVDR-DL to suppress the interference, thus improving the signal-to-interference-and-noise ratio. Hence, they can be applied under lower SNR condition in comparison with other methods. Their RMSEs are lower than those of other methods when
. The performance of the C-FSBL is worse than that of the proposed method, since it directly estimates the DOAs from the received data and ignores the interference. The existence of the interference affects its performance, especially in low SNR cases. Furthermore, the EAAIS-CBF has a wide main lobe, which leads to low resolution. Hence, it cannot provide DOA estimates for the targets.
Finally, the computational efficiency is compared in terms of the running time. The simulation settings are the same as those shown in
Figure 1. The mean running time over 200 trials is shown in
Table 1. The time usage of the proposed method is almost three times smaller than that of the SBL-BPO. This is mainly because the SBL-BPO applies the VBI to estimate the parameters in Equation (12) and the workload almost depends on Equation (14), i.e.,
in each iteration. In contrast, as shown in Algorithm 1, the proposed method avoids matrix inversion. At this time, the computational workload of
updating is
if a basis is added to the active basis set in an iteration, while the computational workload becomes
if a basis is updated or deleted, where
represents the number of elements in active basis set. It is obvious that the workload of the proposed method is smaller than that of the SBL-BPO since
. Hence, the proposed method successfully improves the computational efficiency in comparison with SBL-BPO. Though C-FSBL also avoids matrix inversion, this method uses the vectorized covariance matrix model, increasing the dimension of the matrix. The workload of this method is
if a basis is added to the active basis set in an iteration, while the computational workload is
when a basis is updated or deleted. Hence, its computational workload is also larger than that of the proposed method, since
. Furthermore, the EAAIS-CBF achieves high computational efficiency because it needs no iteration to estimate DOAs and the workload mainly depends on eigen decomposition. Therefore, the proposed method can achieve high estimation precision in the strong interference environment. At the same time, it achieves high computational efficiency, which is comparable to the traditional method.
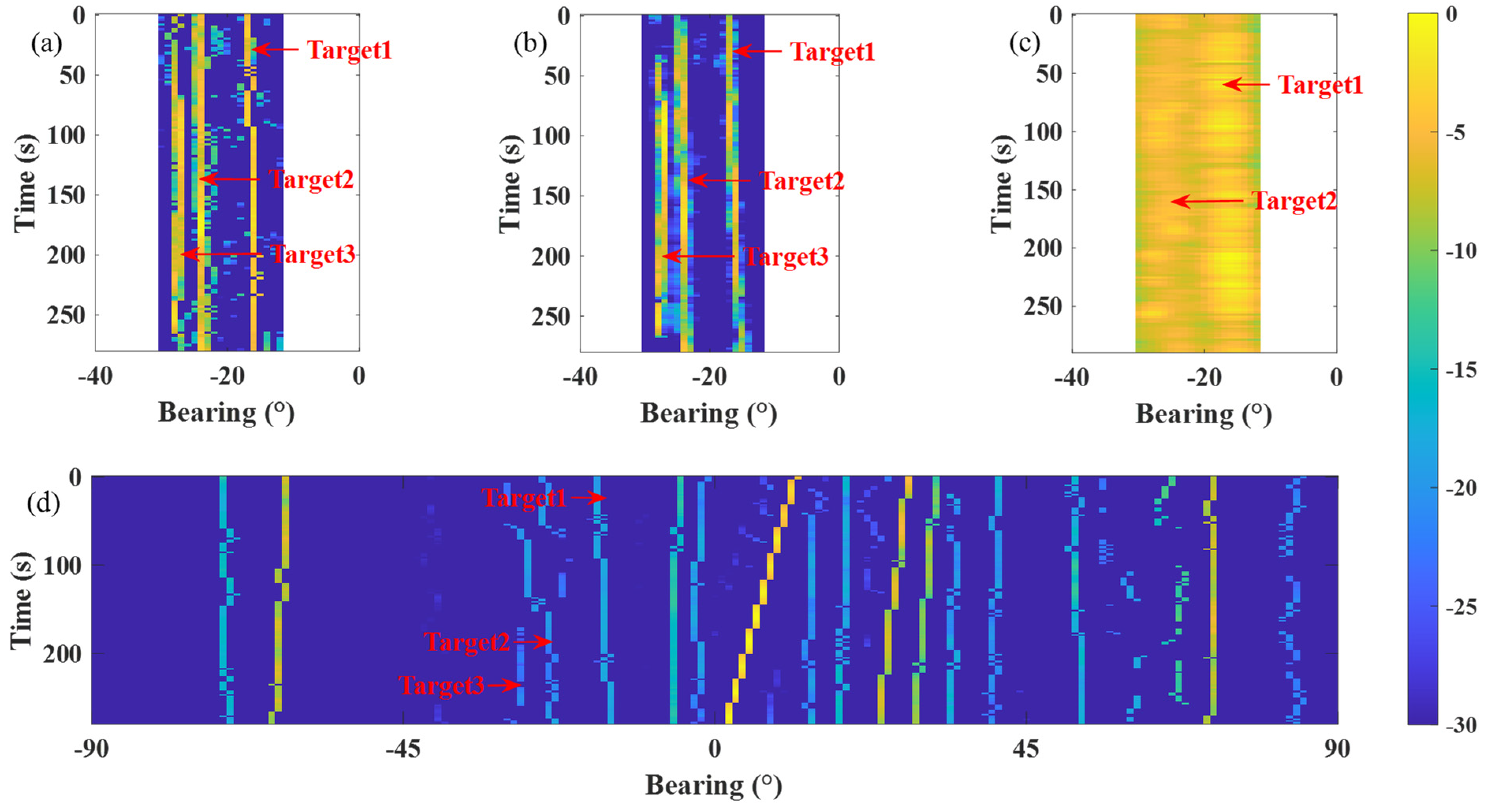
5. Experimental Results
Experimental data were collected by a tow array with 32 hydrophones uniformly spaced at 4 m, which was processed in [
32]. Target1, target2 and target3 were, respectively, located at −18°, −25°, and −29°. The received data sampled at 2048 Hz, are divided into 96 frames with 15 s of data, and the overlap between the adjacent frames is 80%. The data in each frame are divided into 49 blocks with 50% overlap, i.e.,
N = 49. A 1024-point DFT is applied in each block, i.e., the frequency resolution is 2 Hz. The analyzed frequency ranges from 90 to 180 Hz. The sector-of-interest in MSBL-BPO and SBL-BPO is set to [−30, −12]°. The sector is divided with a step of 2° to obtain beam pointing angles. The coarse bearing range in EAAIS-CBF is also set to [−30, −12]°. Other parameter settings remain the same as those in the simulations.
Figure 5 illustrates the DOA estimation result of each method. The MSBL-BPO and SBL-BPO use the MVDR-DL as preprocessor to sufficiently suppress the interferences, thus decreasing the influence of the interference on DOA estimation. They can estimate three weak targets well. In contrast, the performance of C-FSBL is affected by the interference, and it has some difficulties in resolving target2 and target3 from 120 s to 150 s. The EAAIS-CBF removes the interference subspace from the covariance matrix, thus preventing the interference from masking the targets to some degree. Unfortunately, the main lobe of its spatial spectrum is wide. Hence, it cannot resolve target2 and target3 due to the low resolution.
Table 2 shows the mean running time of each algorithm over segments. Similar to the simulation result, the computational efficiency of the proposed method is comparable to that of EAAIS-CBF, but the EAAIS-CBF suffers from low resolution, as shown before. The time usage of the MSBL-BPO is almost three times smaller than that of the SBL-BPO, since the proposed method avoids matrix inversion. The mean running time of the C-FSBL is longer than that of the proposed method due to the large matrix dimension. Hence, we can draw a conclusion that the proposed method can achieve better performance than state-of-the-art methods in a strong interference environment.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}