Abstract
In this article, we propose a control scheme with predictors in a decentralized manner for coupled networked control systems (NCSs) under uncertain, large time-delays and event-triggered inputs. The network-induced delays are handled via the prediction; thus, the delay value is allowed to be large, and the burden of the network is relieved by the event-triggered input. Two methods are employed to deal with the large delay issue: the state and output feedback. When the state of each subsystem is measurable, full-state feedback is used, whereas when the plant state cannot be measured, output feedback is employed with the help of an observer, which is more common in practice. Instead of treating the interactive plants like a global system, the exponential stability of the coupled systems, under decentralized predictors with asynchronous sampled-data feedback, is analyzed in a decentralized way. Finally, the proposed methods are verified via an example of three interconnected cart–pendulum systems, while such systems would not be stabilizable by the traditional approach when the network-induced delays are relatively large.
1. Introduction
Making full use of the burgeoning technologies of digital communication, networked control systems (NCSs) are demonstrated to be a quite effective modern control method. However, the NCSs’ development is not without difficulties. One of the important technical challenges in NCSs is the time-delay arising from network transmission, which deteriorates the performance of controlled systems if the delay is ignored in the design. A large body of existing studies on NCSs care about the robustness to delays provided that delay values are not large. In other words, the transmission delays caused by the communication network are not addressed in the control design, and they only explore the maximum delay that the control systems are able to withstand to preserve performance [1,2].
For the purpose of compensating delays that are large, a useful tool is the prediction approach, which has seen popular growth since it was first proposed in 1959 [3]. Nevertheless, a lot of research on the predictor is limited to a centralized controller of a single plant [4,5,6,7,8,9]. In [10,11,12,13,14,15,16,17,18], the network-dependent control of interconnected systems under communication time-delay considers predictor-free stabilization where the delays are disregarded when the decentralized controllers are designed; thus, the delay length cannot be “large”. Considering two subsystems, a recent paper [19] investigates the continuous-time predictor by state feedback.
On the other hand, as illustrated in [20,21], as networked control systems in either wired or wireless manners have found wide applications in practice, solutions to deal with network constraints involving communication and computation have been unavoidable. The effective solution to overcome these constraints is event-based control, which results in reducing the workload of delayed NCSs and has become increasingly popular. In [22], the authors considered decentralized MRAC for interconnected time-delay systems with delays in both the state and in the input via a nested predictor, but they required that the delays were constant and did not use event-triggered schemes to relax the controller workload.
On the basis of the predictor feedback for a single plant [8,9] and the predictor-free feedback for coupled NCSs [16], this paper applies predictor-based stabilization to coupled NCSs with uncertain, large network-induced delays and event-triggered inputs in a decentralized manner, which is a non-trivial problem due to large delays and interactions among subsystems. By “large delays”, we refer to those delays that render the control system unstable if we do not introduce any designs to take care of the delay’s negative impact [2,23]. In comparison with the literature [24,25], the delays are variable and the event-triggered mechanism is brought in. Two distinct methods are utilized to deal with large delays: full-state and observer-based output feedback. In Section 3, we assume the plant state to be measurable, and use full-state feedback to derive simpler LMI conditions. In Section 4, we take into account a more challenging case of the unmeasurable state, and employ output feedback with the observer, which is important in implementation. Although the global plant is made up of a few of interconnected subsystems, the local control networks are designed in a decentralized manner and do not utilize information from their neighbors. The communication network-induced delays in the subsystems differ from each other, and the sampling instants of the decentralized sensors are asynchronous. An event-triggered strategy is included to decrease the network’s workload.
As an alternative to analyze the interactive systems as a whole entity, under decentralized predictors, we construct the Lyapunov–Krasovskii functional of stability analysis in a decentralized way to ensure the interacted systems are exponentially stable.
2. Sampled-Data Control for Coupled NCSs: State Feedback
Consider the interconnected linear systems below:
where ; N is the index of the subsystem; , , and are the plant state, the plant output, and the control input of the ith subsystem, respectively; is the plant state of the jth subsystem; and is the interconnection matrix, which refers to the coupling interaction between the ith and jth subsystems. We assume that the pair is stabilizable and the pair is detectable.
In this section, we deal with a relatively simple circumstance where full-state feedback is taken into account.
As shown in Figure 1, we apply networked control with sampled data to large-scale systems (1). As revealed in Figure 2, we denote the ith subsystem’s sampling instants as , , which satisfy
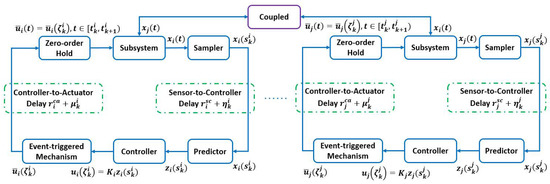
Figure 1.
State feedback for interconnected NCSs with predictors and event-triggered controllers.
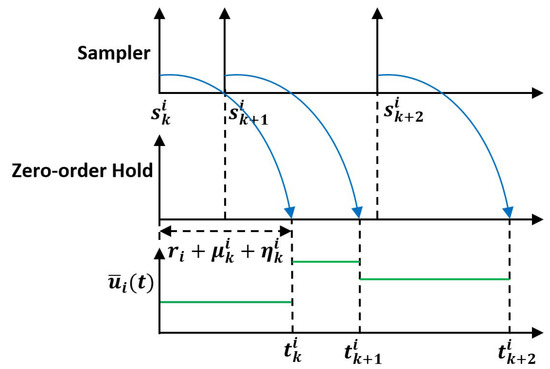
Figure 2.
The timing relationship among the sampling, actuation instants, and transmission delays.
Signal transmissions suffer from large communication delays in both the sensor-to-controller channel and the controller-to-actuator channel, which are denoted by and , respectively, where and are known constant delays, whereas and are uncertain variable delays such that
Since compensation for large delays is one of the main purposes of this paper, there is no restriction that the delays and should be less than the sampling interval .
We assume the controller and actuator to be event-driven; in other words, once they receive new data they update their outputs. As a result, the controller’s updating instants and actuation instants are, respectively, the following:
and they satisfy
For the event-triggered mechanism, a piece-wise function is defined such that
In order to relieve the network’s burden, the event-triggered scheme is employed. The key idea of the event-triggered strategy is the following: only when the relative change among the sequential inputs is greater than a threshold do we send control signals such that
where and .
Under the above mechanism, subsystem (1) becomes
For sake of compensating for the large delay, the predictor is selected as
and the predictor-based state feedback law is designed as
The clocks for the sensor, controller, and actuator are assumed to be synchronized. Please note the upper limit of integral from (5), which implies that the input over the historical time-interval is available to the controller at time . Therefore, the integral term in (12) with a piecewise constant defined by (7) is implementable.
For the stability analysis, we focus on the prediction-based future state governed by
For the jth subsystem, the inverse conversion of (10) is given as
where
which satisfies the following inequality:
Substituting (14)–(16) and (20) into (13), we obtain a closed-loop system for stability analysis as follows:
Theorem 1.
Consider a closed-loop system which is made up of the plant (9) and controller (12). Provided positive tuning parameters , , and α such that , let matrices , and and scalar parameters ; , for ; and satisfy the LMIs:
where is a symmetric matrix consisting of
and I is a unit matrix of appropriate dimensions.
Then, the closed-loop system is exponentially stable with a convergence rate ρ such that with .
3. Sampled-Data Control for Coupled NCSs: Output Feedback
This section deals with a more complicated case where the plant state cannot be measured so that the output feedback with the observer is utilized.
As shown in Figure 3, the communication network and the event-triggered scheme in the output feedback are exactly the same as those of the state feedback. The main difference is that the sampled data of the output feedback is the output rather than the state . As a result, under the transmission delays and the event-triggered scheme, subsystems (1) and (2) become
where the event-triggered mechanism is defined by (8).
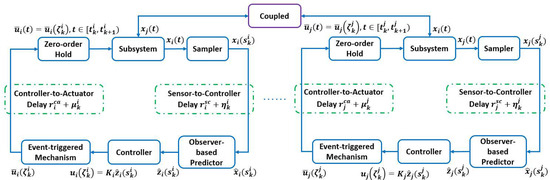
Figure 3.
Output feedback for interconnected NCSs with predictors and event-triggered controllers.
We bring in to be an estimate of with the estimation error to overcome the difficulty that the full-state feedback of each sub-plant is not available to be measured. Accordingly, we design the observer as
where is given by (7).
The predictor is designed in an observer-based manner such that
and the predictor-based output feedback law is selected as
For stability analysis, the dynamics of in (44) and (42) are calculated as
where , and is defined underneath (14) and satisfies (17).
Subtracting (42) from (40), the estimation error is governed by
where , , and are defined underneath (15) and (16), satisfy (17), and (18) and
The term is given by (21) and meets
Theorem 2.
Consider a closed-loop system that consists of plants (40) and (41), observers (42) and (43), and controller (46). Provided tuning parameters , and such that , let matrices , , , and scalar parameters ; , for ; and satisfy the LMIs:
where is a symmetric matrix made up of
and I is the unit matrix of the appropriate dimensions.
Then, the closed-loop system is exponentially stable with a convergence rate ρ such that with .
4. Applicable Example of Physical Systems
In this section, we take into account an application of three coupled inverted pendulums on three carts, which is borrowed from [16,26,27,28] (as revealed in Figure 4). We utilize the control mechanism proposed in previous sections.
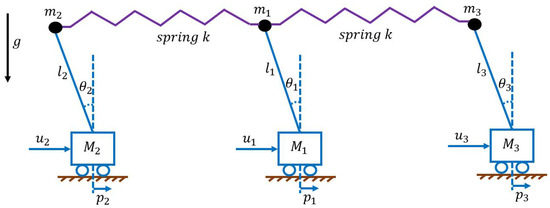
Figure 4.
Three coupled cart–pendulum systems.
The system matrices are , , , and . The control gains are selected as and . The observer gains are selected as . The initial states are set as , , and .
Please note that the maximum delays allowed by predictor-free controllers in [16,26,27,28] are less than 0.03s.
As shown in Figure 5, when the predictor is not employed in the feedback, the three sub-plants become unstable if the delay lengths are s. In contrast, as revealed in Figure 6 and Figure 7, when the predictor is utilized in the feedback, the three sub-plants are still stable even if the delay lengths are as large as s. It is seen that, relative to the delay length promised by the predictor-free controller, the predictor-based controller allows for a larger delay.
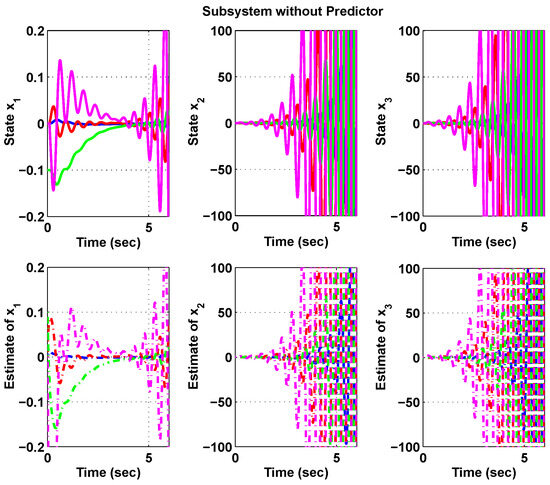
Figure 5.
Predictor-free feedback under small delay of 0.1 s.
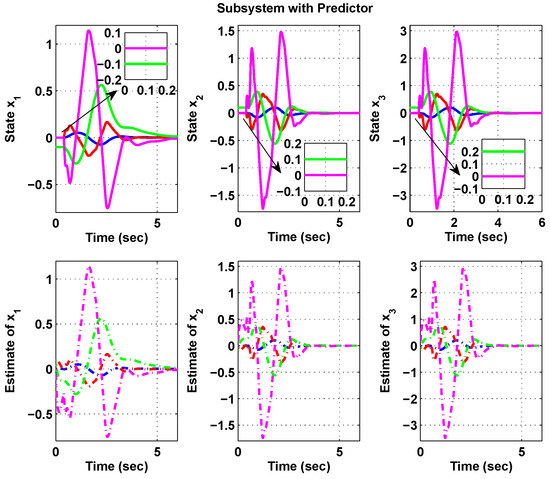
Figure 6.
Predictor-based feedback under large delay of 0.2 s.
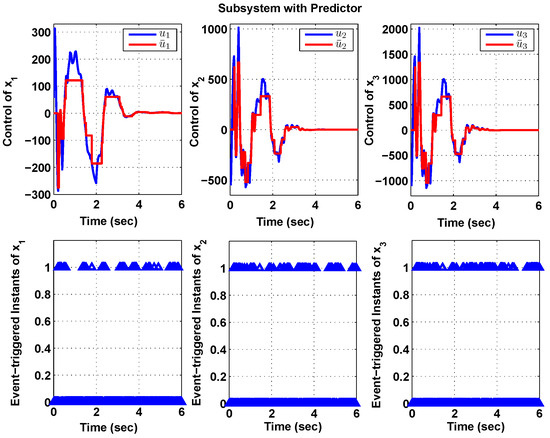
Figure 7.
Predictor event-triggered control input under large delay of 0.2 s.
5. Conclusions
This paper develops predictor-dependent stabilization for coupled networked control systems under large, uncertain transmission delays and event-triggered strategies in a decentralized manner. The network-induced delays in the communication network in our paper are addressed by a prediction method; thus, the delay length is promised to be large. The local control laws of the subsystems that are coupled work independently using no information from their neighbors and operate asynchronously under respective sampling instants. Given the controller and observer gains that stabilize the systems in the case of no delay, a couple of prediction-dependent controllers are proposed to compensate the large delays: prediction using a state feedback method and prediction using an output feedback method. The first kind of method leads to simpler conditions, whereas the second is easily implementable in practice. The stability analysis via the Lyapunov–Krasovskii method is carried out in a decentralized way. The practical implementation of three coupled cart–pendulum systems is taken into account to validate the given method in a case where the transmission delays are so large that the closed-loop control system cannot be stabilized if we do not use a predictor.
Author Contributions
Conceptualization, Y.Z. and M.Z.; Methodology, Y.Z. and Q.J.; Simulation, Y.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by National Key R&D Program of China (Grant No. 2021YFB1714100).
Data Availability Statement
All data underlying the results are available as part of the article and no additional source data are required.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Shi, P.; Li, F.; Wu, L.; Lim, C.C. Neural network-based passive filtering for delayed neutral-type semi-Markovian jump systems. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2101–2114. [Google Scholar] [CrossRef]
- Fridman, E. Introduction to Time-Delay Systems: Analysis and Control; Birkhauser: Basel, Switzerland, 2014. [Google Scholar]
- Smith, O.J.M. A controller to overcome dead time. ISA 1959, 6, 28–33. [Google Scholar]
- Novella-Rodriguez, D.F.; Tudon-Martinez, J.C.; Vazquez-Guerra, R.J.; Marquez-Rubio, J.F. Feedback control based on a sequential observer-predictor for systems with unknown actuator delay. Int. J. Control. Autom. Syst. 2022, 20, 2779–2791. [Google Scholar] [CrossRef]
- Wu, F.; Lian, J. Truncated predictor feedback control for switched linear systems subject to input delay and saturation. Int. J. Control. Autom. Syst. 2022, 20, 2849–2856. [Google Scholar] [CrossRef]
- Rajkumar, S.M.; Chakraborty, S.; Dey, R.; Deb, D. Online delay estimation and adaptive compensation in wireless networked system: An embedded control design. Int. J. Control. Autom. Syst. 2020, 18, 856–866. [Google Scholar] [CrossRef]
- Artstein, Z. Linear systems with delayed controls: A reduction. IEEE Trans. Autom. Control 1982, 27, 869–879. [Google Scholar] [CrossRef]
- Selivanov, A.; Fridman, E. Predictor-based networked control under uncertain transmission delays. Automatica 2016, 70, 101–108. [Google Scholar] [CrossRef]
- Selivanov, A.; Fridman, E. Observer-based input-to-state stabilization of networked control systems with large uncertain delays. Automatica 2016, 74, 63–70. [Google Scholar] [CrossRef]
- Michiels, W.; Niculescu, S.I. Stability and Stabilization of Time-Delay Systems: An Eigenvalue-Based Approach; SIAM: Philadelphia, PA, USA, 2007. [Google Scholar]
- Bakule, L. Decentralized control: An overview. Annu. Rev. Control. 2008, 32, 87–98. [Google Scholar] [CrossRef]
- Mahmoud, M.S. Decentralized stabilization of interconnected systems with time-varying delays. IEEE Trans. Autom. Control 2009, 54, 2663–2668. [Google Scholar] [CrossRef]
- Erol, H.E.; Iftar, A. Stabilization of decentralized descriptor-type neutral time-delay systems by time-delay controllers. Automatica 2016, 64, 262–269. [Google Scholar] [CrossRef]
- Zhang, M.; Shen, C.; Wu, Z.; Zhang, D. Dissipative filtering for switched fuzzy systems with missing measurements. IEEE Trans. Cybern. 2020, 20, 1931–1940. [Google Scholar] [CrossRef]
- Zhang, M.; Shi, P.; Ma, L.; Cai, J.; Su, H. Quantized feedback control of fuzzy markov jump systems. IEEE Trans. Cybern. 2019, 49, 3357–3384. [Google Scholar] [CrossRef]
- Freirich, D.; Fridman, E. Decentralized networked control of systems with local networks: A time-delay approach. Automatica 2016, 69, 201–209. [Google Scholar] [CrossRef]
- Zhang, M.; Dong, S.; Wu, Z.-G.; Chen, G.; Guan, X. Reliable Event-Triggered Load Frequency Control of Uncertain Multi-Area Power Systems with Actuator Failures. IEEE Trans. Autom. Sci. Eng. 2023, 20, 1545–1595. [Google Scholar]
- Zhang, M.; Dong, S.; Shi, P.; Chen, G.; Guan, X. Distributed Observer-based Event-Triggered Load Frequency Control of Multi-Area Power Systems under Cyber Attacks. IEEE Trans. Autom. Sci. Eng. 2023, 20, 2435–2444. [Google Scholar] [CrossRef]
- Liu, K.; Sun, X.; Krstic, M. Distributed predictor-based stabilization of continuous interconnected systems with input delays. Automatica 2018, 91, 69–78. [Google Scholar] [CrossRef]
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef]
- Heemels, W.P.M.H.; Johansson, K.H.; Tabuad, P. An introduction to event-triggered and self-triggered control. In Proceedings of the 51st IEEE Conference on Decision and Control, Maui, HI, USA, 10–13 December 2012; pp. 3270–3285. [Google Scholar]
- Hashemipour, S.H.; Vasegh, N.; Sedigh, A.K. Decentralized model reference adaptive control for interconnected time delay systems with delay in state and compensation of long delay in input by nested prediction. Int. J. Control. Autom. Syst. 2017, 5, 1198–1206. [Google Scholar] [CrossRef]
- Krstic, M. Delay Compensation for Nonlinear, Adaptive, and PDE Systems; Birkhauser: Berlin, Germany, 2009. [Google Scholar]
- Zhu, Y.; Fridman, E. Predictor methods for decentralized control of large-scale systems with input delays. Automatica 2020, 116, 108903. [Google Scholar] [CrossRef]
- Zhu, Y.; Fridman, E. Observer-based decentralized predictor control for large-scale interconnected systems with large delays. IEEE Trans. Autom. Control 2020, 66, 2897–2904. [Google Scholar] [CrossRef]
- Borgers, D.; Heemels, W. Stability analysis of large-scale networked control systems with local networks: A hybrid small-gain approach. In Proceedings of the 17th International Conference on Hybrid Systems: Computation and Control, Berlin, Germany, 15–17 April 2014; pp. 103–112. [Google Scholar]
- Heemels, W.; Borgers, D.; Wouw, N.v.; Nesic, D.; Teel, A. Stability analysis of nonlinear networked control systems with asynchronous communication: A small-gain approach. In Proceedings of the 52th IEEE Conference on Decision and Control, Florence, Italy, 10–13 December 2013; pp. 4631–4637. [Google Scholar]
- Dolk, V.-S.; Borgers, D.-P.; Heemels, W.-P.-M.-H. Output-based and decentralized dynamic event-triggered control with guaranteed Lp-gain performance and zeno-freeness. IEEE Trans. Autom. Control 2017, 62, 34–49. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).