
5G Reconfigurable Intelligent Surface TDOA Localization Algorithm


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- A reconfigurable intelligent surface-based localization (RBL) system model (composed of a single-antenna base station, a user to be localized, and multiple RISs) was designed. The system is set up as an NLOS environment for the base station and user to be localized, communicating through the RIS, which effectively solves the problem of poor localization under the NLOS path.
- (2)
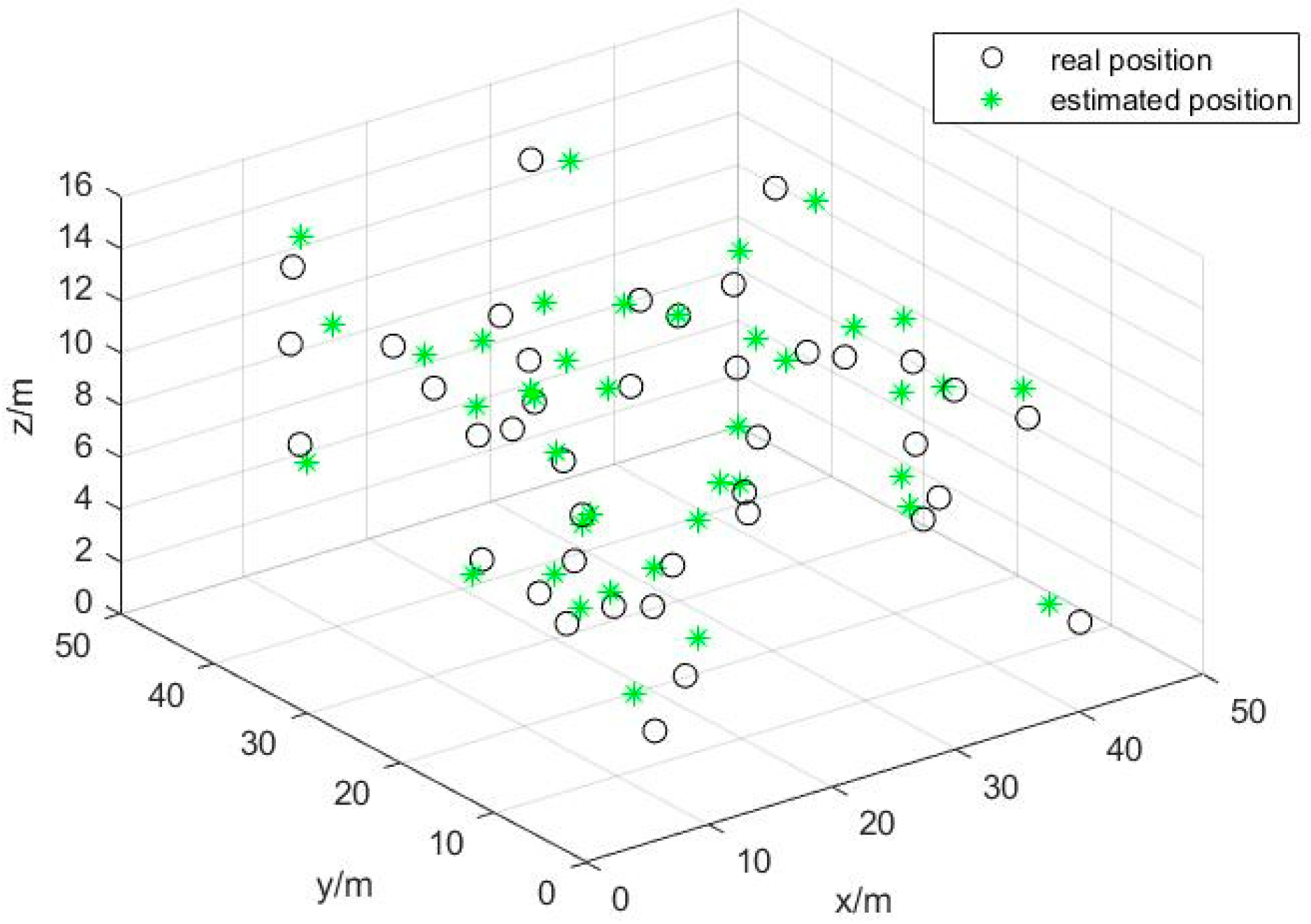
- A reconfigurable intelligent surface non-line-of-sight TDOA localization (RNTL) algorithm is proposed, and the range from RIS to user to be located is solved by adjusting the RIS’s phase shift matrix (PSM). The estimated coordinates of the user to be located are further solved, and an optimal issue is created to minimalize the separation between each of the estimated coordinates and the actual coordinates.
- (3)
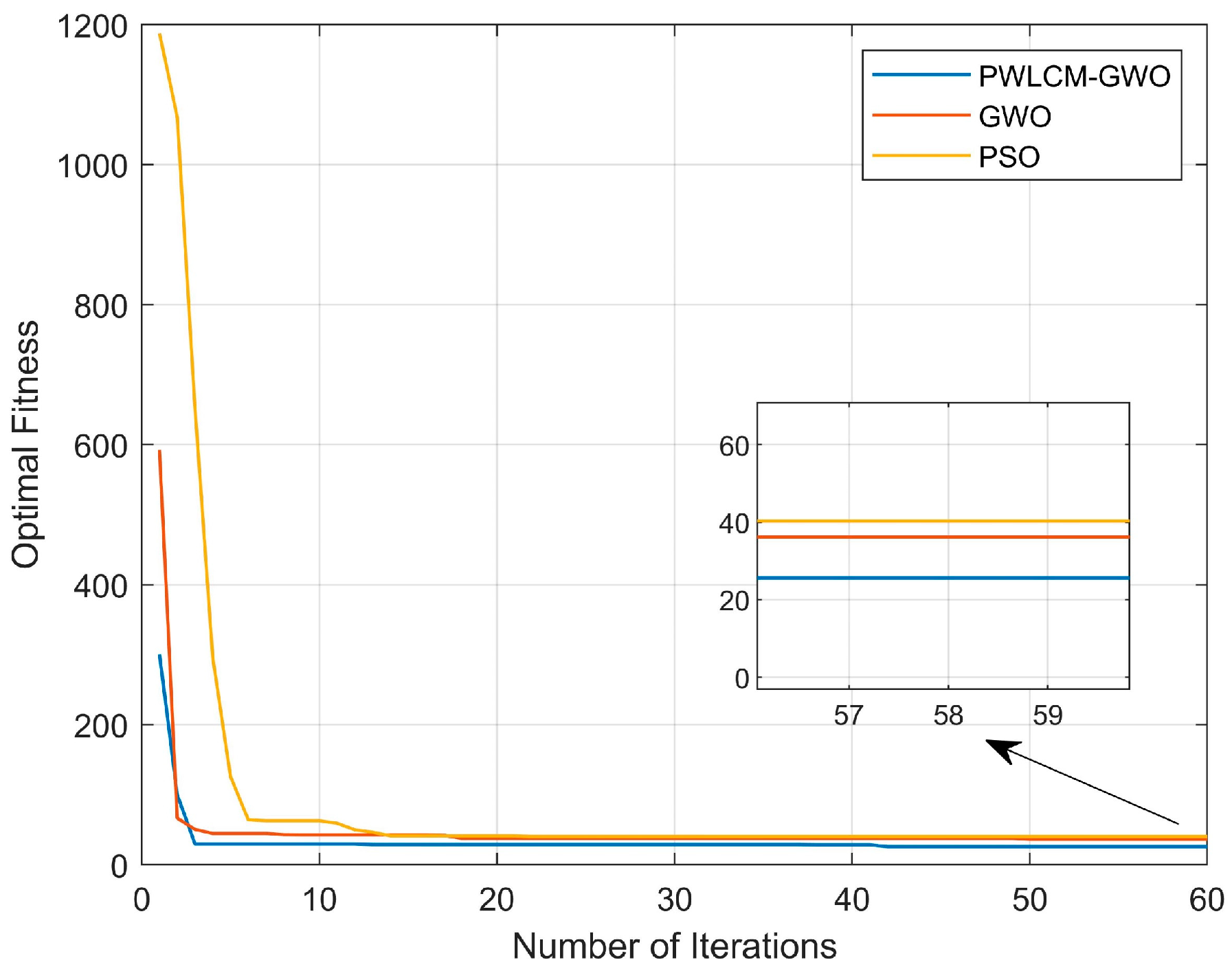
- A PWLCM–gray wolf optimization (PWLCM-GWO) algorithm is suggested to address the optical issue. First, PWLCM chaotic mapping is introduced to address the issue of insufficient diversity of individuals in the traditional GWO algorithm. Second, an improved convergence factor is used to solve the problem of difficulty in balancing the global search and local hunting in the traditional GWO algorithm. Finally, population elimination is induced to lower the computational complexity of the method while maintaining the accuracy of the calculation.
- (4)
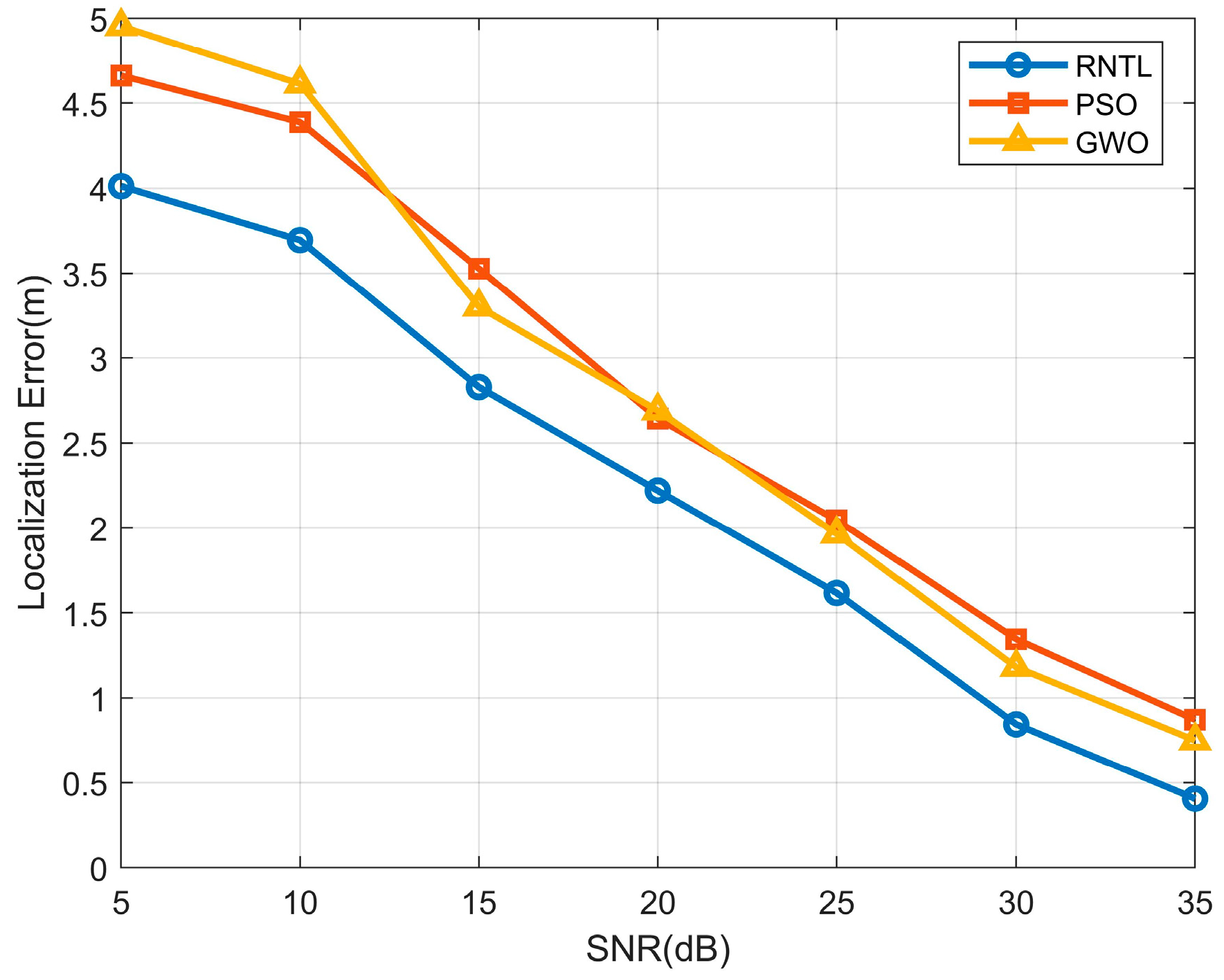
- Simulation results indicate that the proposed RNTP algorithm has superior performance to that of the GWO and particle swarm optimization (PSO) algorithms in varying signal-to-noise ratios (SNRs), and the localization error obtained by this algorithm can be reduced by up to 46% and 53.5% compared with the GWO and PSO algorithms, respectively.
2. System Model
3. RNTL Algorithm
3.1. RNTL Algorithm
3.2. PWLCM-GWO
| Algorithm 1 RNTL Algorithm | |
| Input: maximum population size , minimum population size , maximum number of hunts , the location of BS , the location of in , free space loss , input signal s; | |
| 1. | Find the output when noise is included according to Equation (14); |
| 2. | The distance between and the user to be localized UE is found by Equation (16); |
| 3. | The estimated point coordinates are solved by the TDOA principle, and the anomalies are removed using the quadrature method; |
| 4. | The initial position of the individual is generated according to the PWLCM chaotic mapping in Equation (19); |
| 5. | Calculate the fitness of all individuals according to Equation (18), and find the three individuals with the smallest fitness; |
| 6. | for do |
| 7. | for do |
| 8. | Calculate the wiggle factor according to Equation (21); |
| 9. | Calculate the convergence factor according to Equation (24); |
| 10. | Calculate the new position of the individual according to Equations (20), (22), (23) and (26); |
| 11. | Discipline the transgressing individual; |
| 12. | The new fitness of each individual is calculated according to Equation (18); |
| 13. | end |
| 14. | While protecting the better individuals, some of the worse individuals are eliminated according to Equations (27) and (28); |
| 15. | Re-comparison determines the three individuals with the smallest fitness; |
| 16. | end |
| Output: localize the optimal solution | |
4. Simulation Results and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, C.H.; Chen, L.H.; Wu, H.K.; Jin, M.H.; Chen, G.H.; Gomez, J.L.G.; Chou, C.F. An Indoor Positioning Algorithm Based on Fingerprint and Mobility Prediction in RSS Fluctuation-Prone WLANs. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2926–2936. [Google Scholar] [CrossRef]
- Chen, R.; Liu, M.; Hui, Y.; Cheng, N.; Li, J. Reconfigurable Intelligent Surfaces for 6G IoT Wireless Positioning: A Contemporary Survey. IEEE Internet Things J. 2022, 9, 23570–23582. [Google Scholar] [CrossRef]
- Saleh, S.; El-Wakeel, A.S.; Noureldin, A. 5G-Enabled Vehicle Positioning Using EKF With Dynamic Covariance Matrix Tuning. IEEE Can. J. Electr. Comput. Eng. 2022, 45, 192–198. [Google Scholar] [CrossRef]
- Ko, C.-H.; Wu, S.-H. A Framework for Proactive Indoor Positioning in Densely Deployed WiFi Networks. IEEE Trans. Mob. Comput. 2022, 21, 1–15. [Google Scholar] [CrossRef]
- Tao, Y.; Zhao, L. AIPS: An Accurate Indoor Positioning System with Fingerprint Map Adaptation. IEEE Internet Things J. 2022, 9, 3062–3073. [Google Scholar] [CrossRef]
- Jiang, W.; Cao, Z.; Cai, B.; Li, B.; Wang, J. Indoor and Outdoor Seamless Positioning Method Using UWB Enhanced Multi-Sensor Tightly-Coupled Integration. IEEE Trans. Veh. Technol. 2021, 70, 10633–10645. [Google Scholar] [CrossRef]
- Zhang, Z.; Chang, Q.; Zhao, N.; Wang, H. TOA-Based Relative Localization With Reflecting Signal Paths Assisted: Algorithm and Performance Analysis. IEEE Sens. Lett. 2022, 6, 7501004. [Google Scholar] [CrossRef]
- Navrátil, V.; Krška, J.; Vejražka, F. Concurrent Bidirectional TDoA Positioning in UWB Network With Free-Running Clocks. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4434–4450. [Google Scholar] [CrossRef]
- Sheng, H.-T.; Wu, W.-R.; Hsiao, W.-H.; Servetnyk, M. Joint Channel and AoA Estimation in OFDM Systems: One Channel Tap With Multiple AoAs Problem. IEEE Commun. Lett. 2021, 25, 2245–2249. [Google Scholar] [CrossRef]
- Zandamela, A.; Chiumento, A.; Marchetti, N.; Ammann, M.J.; Narbudowicz, A. Exploiting Multimode Antennas for MIMO and AoA Estimation in Size-Constrained IoT Devices. IEEE Sens. Lett. 2023, 7, 5500904. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, X.-P.; Cui, X.; Lu, M. Optimal Two-Way TOA Localization and Synchronization for Moving User Devices With Clock Drift. IEEE Trans. Veh. Technol. 2021, 70, 7778–7789. [Google Scholar] [CrossRef]
- Hong, K.; Wang, T.; Liu, J.; Wang, Y.; Shen, Y. A Learning-Based AoA Estimation Method for Device-Free Localization. IEEE Commun. Lett. 2022, 26, 1264–1267. [Google Scholar] [CrossRef]
- Zhao, B.; Hu, K.; Gong, Y.; Shen, Y. A Tensor-Based Joint AoA and ToF Estimation Method for Wi-Fi Systems. IEEE Wirel. Commun. Lett. 2021, 10, 2543–2546. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, T.; Shin, H.-S. An Efficient Constrained Weighted Least Squares Method With Bias Reduction for TDOA-Based Localization. IEEE Sens. J. 2021, 21, 10122–10131. [Google Scholar] [CrossRef]
- Delcourt, M.; Le Boudec, J.-Y. TDOA Source-Localization Technique Robust to Time-Synchronization Attacks. IEEE Trans. Inf. Forensics Secur. 2021, 16, 4249–4264. [Google Scholar] [CrossRef]
- Dash, S.P.; Mallik, R.K.; Pandey, N. Performance Analysis of an Index Modulation-Based Receive Diversity RIS-Assisted Wireless Communication System. IEEE Commun. Lett. 2022, 26, 768–772. [Google Scholar] [CrossRef]
- Bansal, A.; Agrawal, N.; Singh, K. Rate-Splitting Multiple Access for UAV-Based RIS-Enabled Interference-Limited Vehicular Communication System. IEEE Trans. Intell. Veh. 2023, 8, 936–948. [Google Scholar] [CrossRef]
- Allu, R.; Taghizadeh, O.; Singh, S.K.; Singh, K.; Li, C.-P. Robust Beamformer Design in Active RIS-Assisted Multiuser MIMO Cognitive Radio Networks. IEEE Trans. Cogn. Commun. Netw. 2023, 9, 398–413. [Google Scholar] [CrossRef]
- Adam, A.; Ouamri, M.A.; Muthanna, M.S.A.; Li, X.; Elhassan, M.A.; Muthanna, A. Real-Time and Security-Aware Precoding in RIS-Empowered Multi-User Wireless Networks. arXiv 2023, arXiv:2401.00192. [Google Scholar]
- Liu, S.; Liu, R.; Li, M.; Liu, Y.; Liu, Q. Joint BS-RIS-User Association and Beamforming Design for RIS-Assisted Cellular Networks. IEEE Trans. Veh. Technol. 2023, 72, 6113–6128. [Google Scholar] [CrossRef]
- Adam, A.B.; Ouamri, M.A.; Wan, X.; Muthanna, M.S.A.; Alkanhel, R.; Muthanna, A.; Li, X. Secure Communication in UAV–RIS-Empowered Multiuser Networks: Joint Beamforming, Phase Shift, and UAV Trajectory Optimization. IEEE Syst. J. 2024, 1–11. [Google Scholar] [CrossRef]
- Ma, S.; Shen, W.; Gao, X.; An, J. Robust Channel Estimation for RIS-Aided Millimeter-Wave System With RIS Blockage. IEEE Trans. Veh. Technol. 2022, 71, 5621–5626. [Google Scholar] [CrossRef]
- Huang, S.; Wang, B.; Zhao, Y.; Luan, M. Near-Field RSS-Based Localization Algorithms Using Reconfigurable Intelligent Surface. IEEE Sens. J. 2022, 22, 3493–3505. [Google Scholar] [CrossRef]
- Gao, P.; Lian, L.; Yu, J. Wireless Area Positioning in RIS-Assisted mmWave Systems: Joint Passive and Active Beamforming Design. IEEE Signal Process. Lett. 2022, 29, 1372–1376. [Google Scholar] [CrossRef]
- Zhang, Z.; Dai, L.; Chen, X.; Liu, C.; Yang, F.; Schober, R.; Poor, H.V. Active RIS vs. Passive RIS: Which Will Prevail in 6G? IEEE Trans. Commun. 2023, 71, 1707–1725. [Google Scholar] [CrossRef]
- Amri, M.M.; Tran, N.M.; Park, J.H.; Kim, D.I.; Choi, K.W. Sparsity-Aware Channel Estimation for Fully Passive RIS-Based Wireless Communications: Theory to Experiments. IEEE Internet Things J. 2023, 10, 8046–8067. [Google Scholar] [CrossRef]
- Zeng, S.; Zhang, H.; Di, B.; Han, Z.; Song, L. Reconfigurable Intelligent Surface (RIS) Assisted Wireless Coverage Extension: RIS Orientation and Location Optimization. IEEE Commun. Lett. 2021, 25, 269–273. [Google Scholar] [CrossRef]
- Luan, M.; Wang, B.; Zhao, Y.; Feng, Z.; Hu, F. Phase Design and Near-Field Target Localization for RIS-Assisted Regional Localization System. IEEE Trans. Veh. Technol. 2022, 71, 1766–1777. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, H.; Di, B.; Bian, K.; Han, Z.; Song, L. MetaLocalization: Reconfigurable Intelligent Surface Aided Multi-User Wireless Indoor Localization. IEEE Trans. Wirel. Commun. 2021, 20, 7743–7757. [Google Scholar] [CrossRef]
- Fascista, A.; Keskin, M.F.; Coluccia, A.; Wymeersch, H.; Seco-Granados, G. RIS-Aided Joint Localization and Synchronization With a Single-Antenna Receiver: Beamforming Design and Low-Complexity Estimation. IEEE J. Sel. Top. Signal Process. 2022, 16, 1141–1156. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Zhang, Y. 5G Reconfigurable Intelligent Surface TDOA Localization Algorithm. Electronics 2024, 13, 2409. https://doi.org/10.3390/electronics13122409
Liu C, Zhang Y. 5G Reconfigurable Intelligent Surface TDOA Localization Algorithm. Electronics. 2024; 13(12):2409. https://doi.org/10.3390/electronics13122409
Chicago/Turabian StyleLiu, Changbao, and Yuexia Zhang. 2024. "5G Reconfigurable Intelligent Surface TDOA Localization Algorithm" Electronics 13, no. 12: 2409. https://doi.org/10.3390/electronics13122409
APA StyleLiu, C., & Zhang, Y. (2024). 5G Reconfigurable Intelligent Surface TDOA Localization Algorithm. Electronics, 13(12), 2409. https://doi.org/10.3390/electronics13122409