
A Proposed Single-Input Multi-Output Battery-Connected DC–DC Buck–Boost Converter for Automotive Applications


Abstract
:1. Introduction
2. Materials and Methods
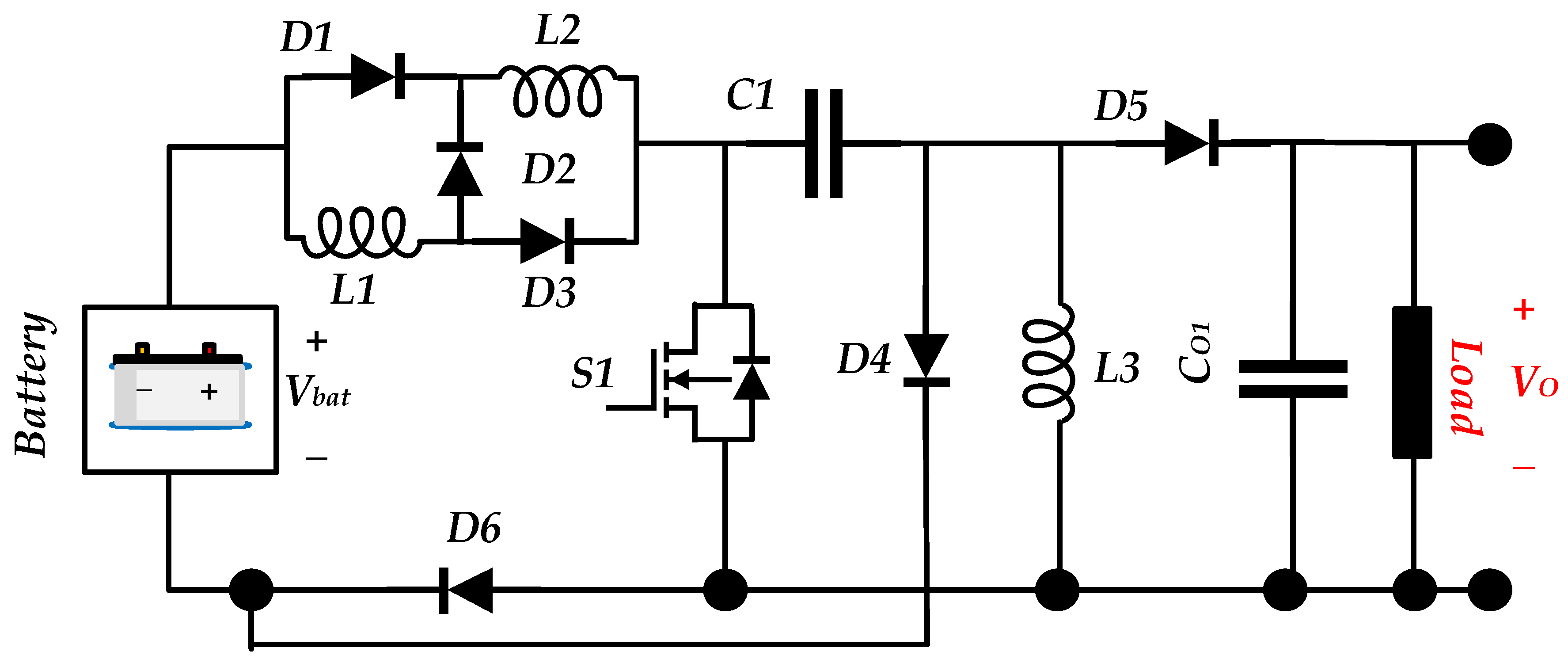
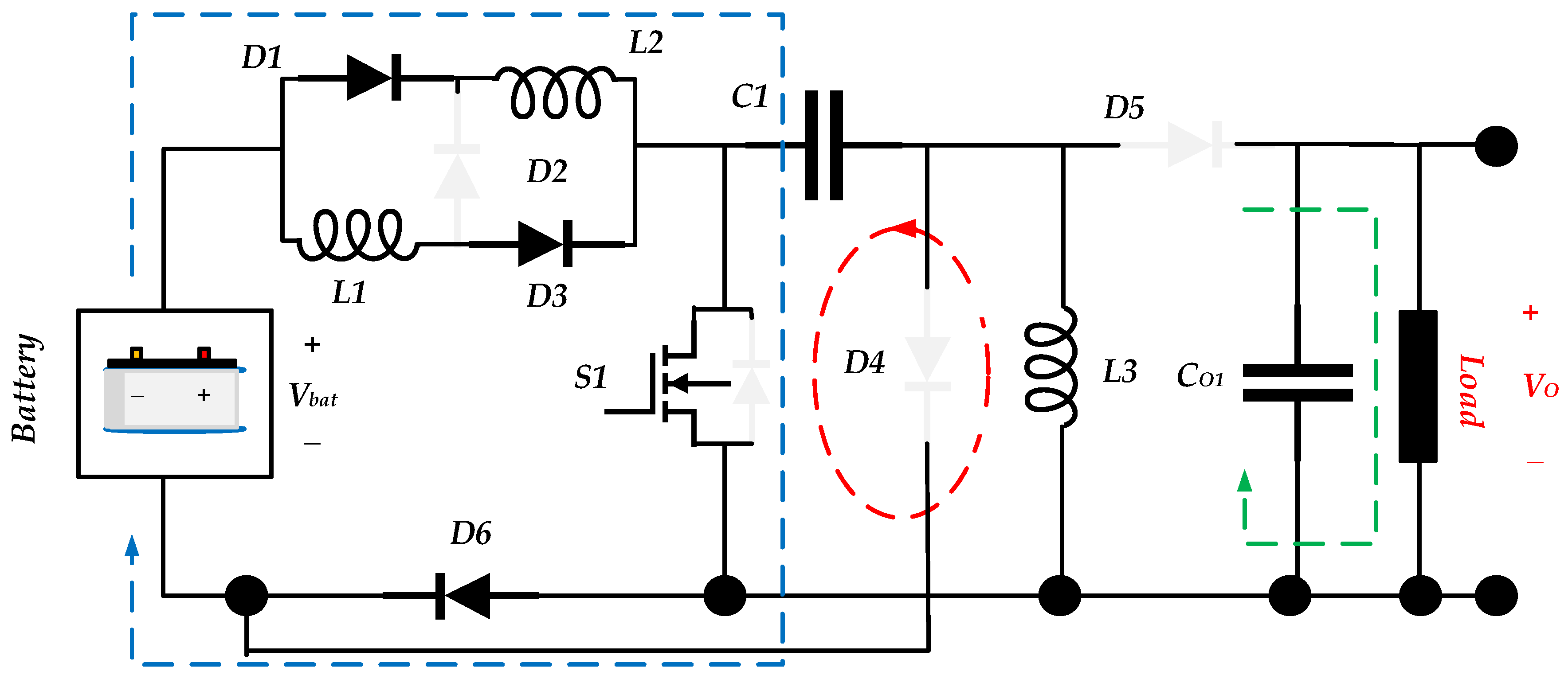
2.1. The Proposed Converter
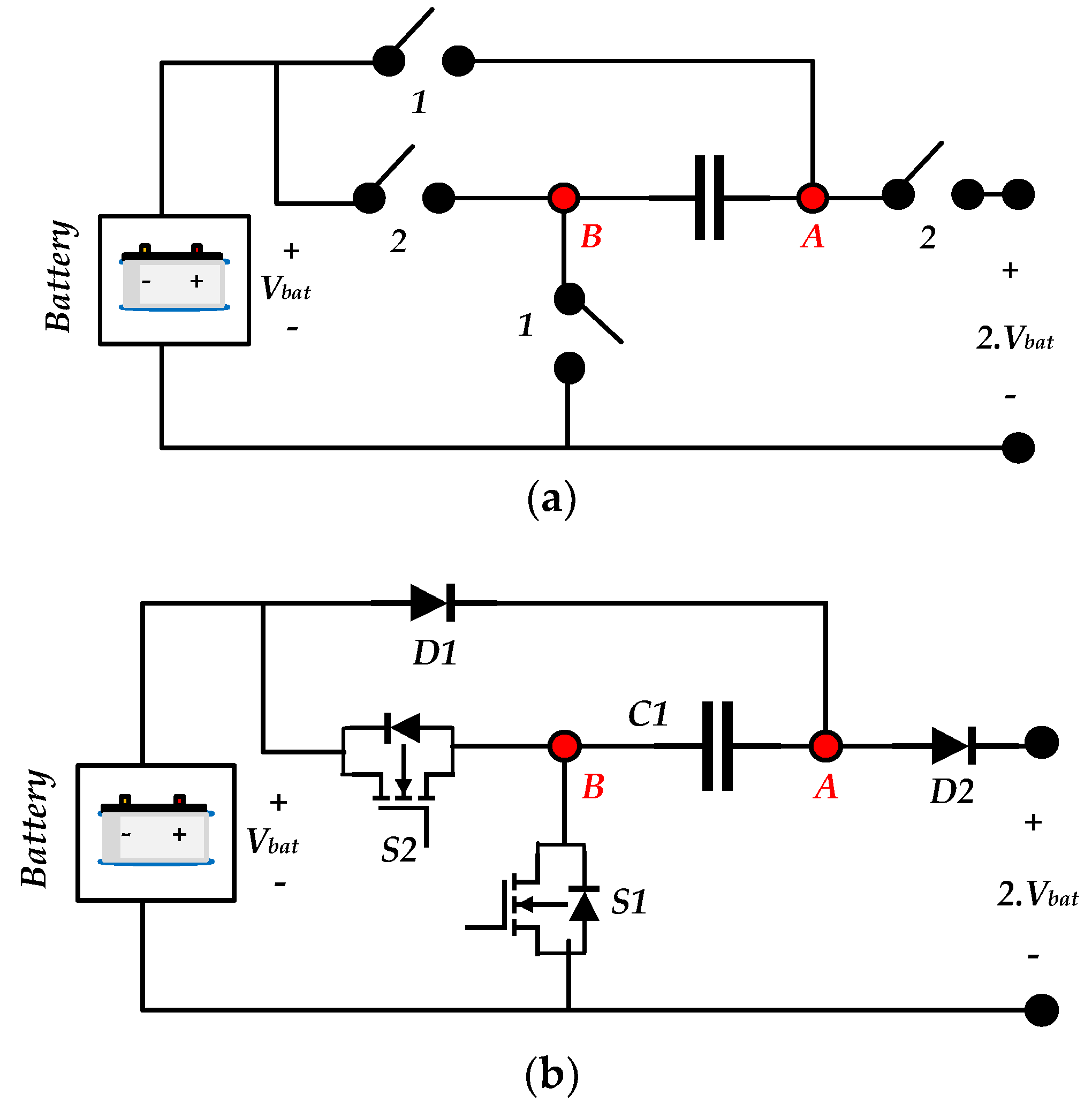
2.2. Voltage Multiplier Circuit (VMC)
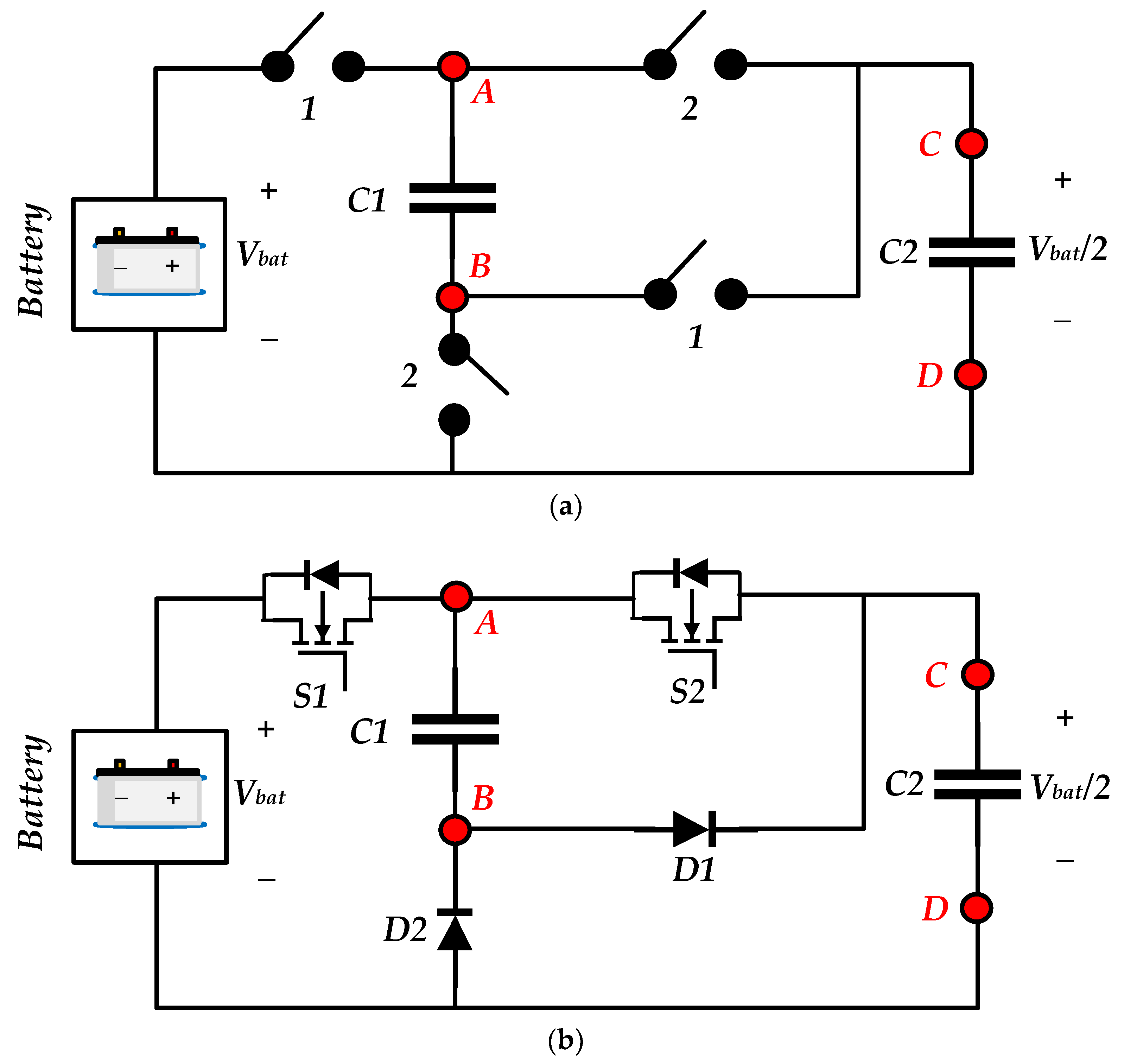
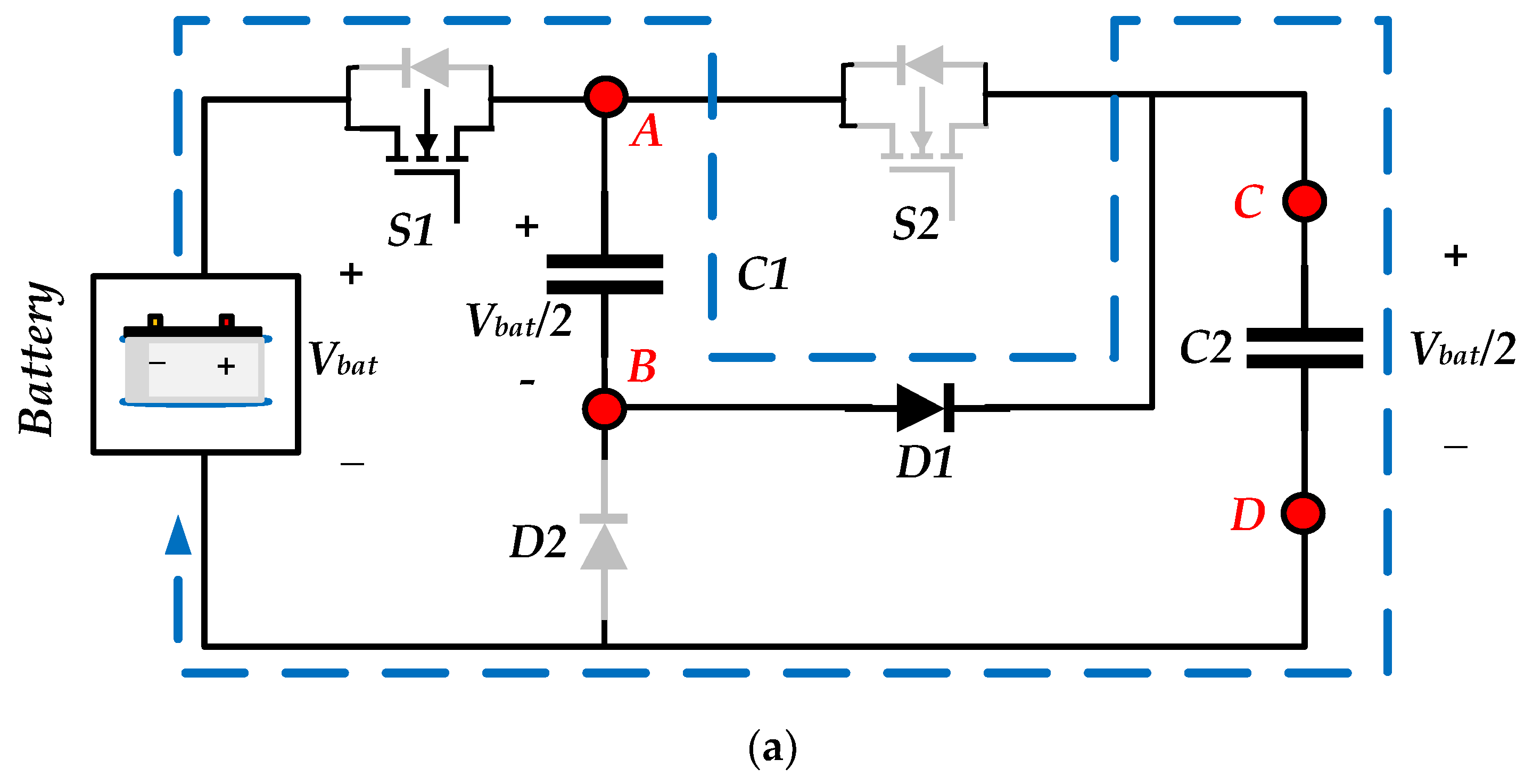
2.3. Voltage Divider Circuit (VDC)
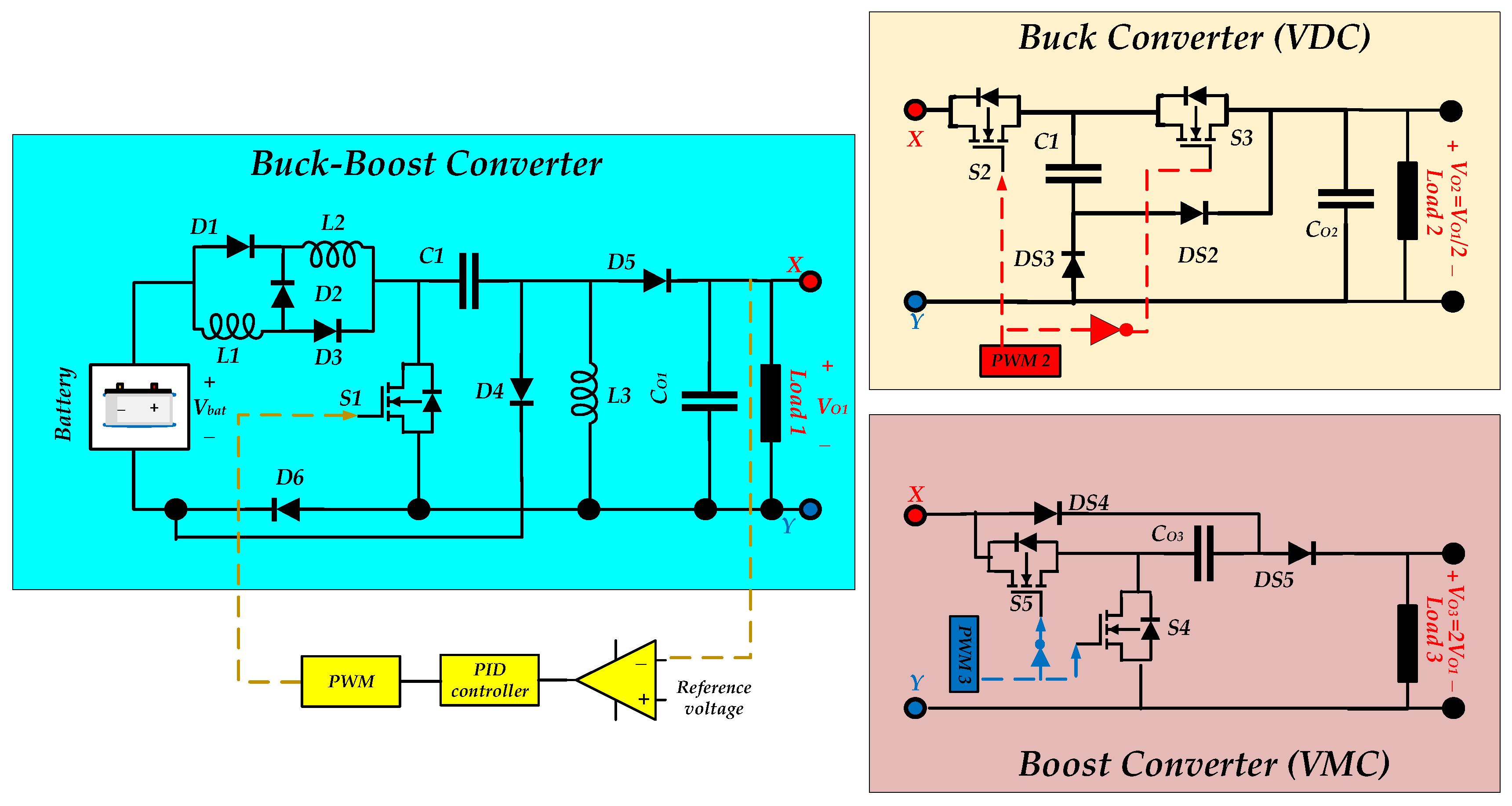
2.4. The Proposed Converter with VMC and VDC Cells
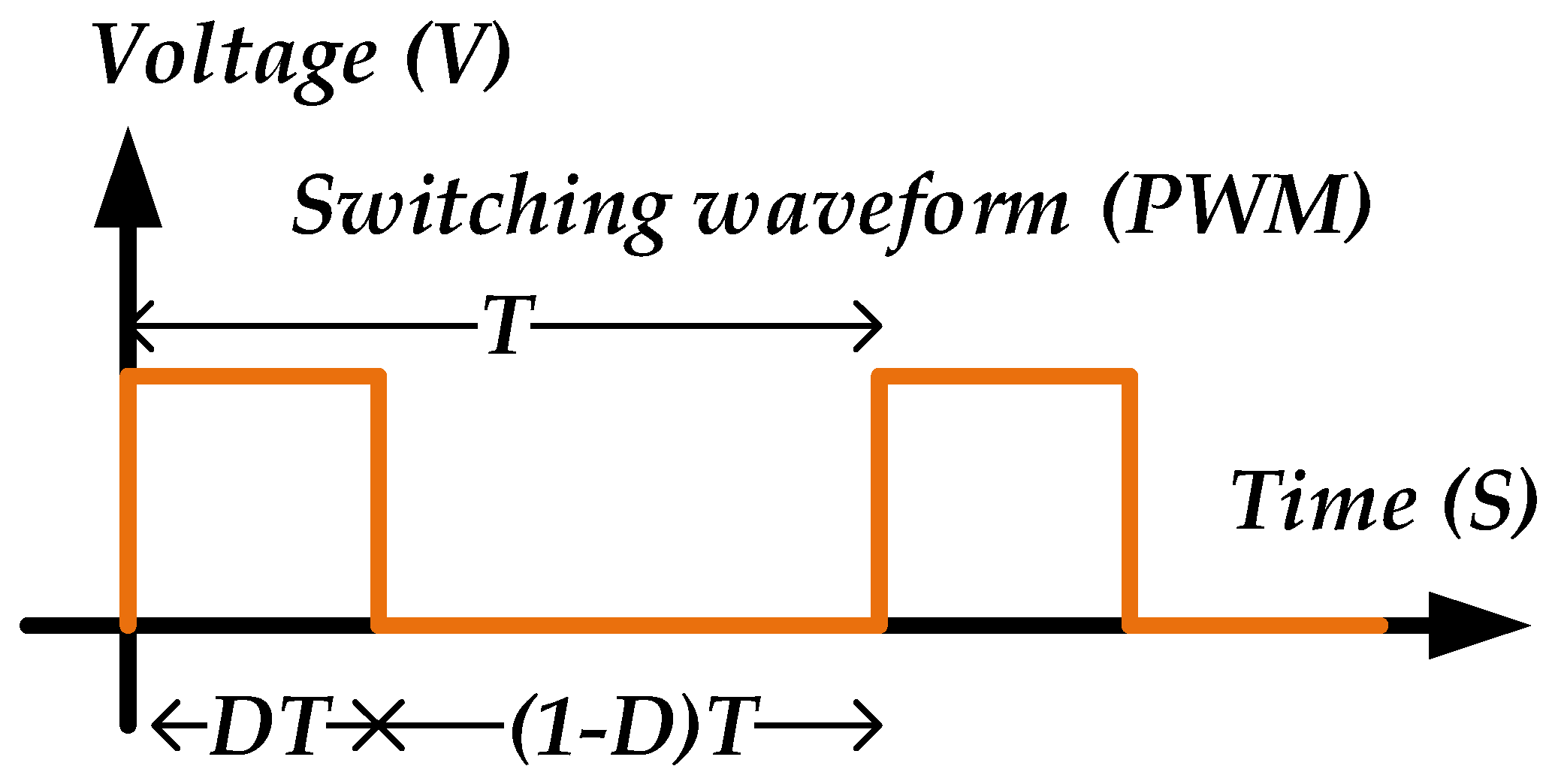
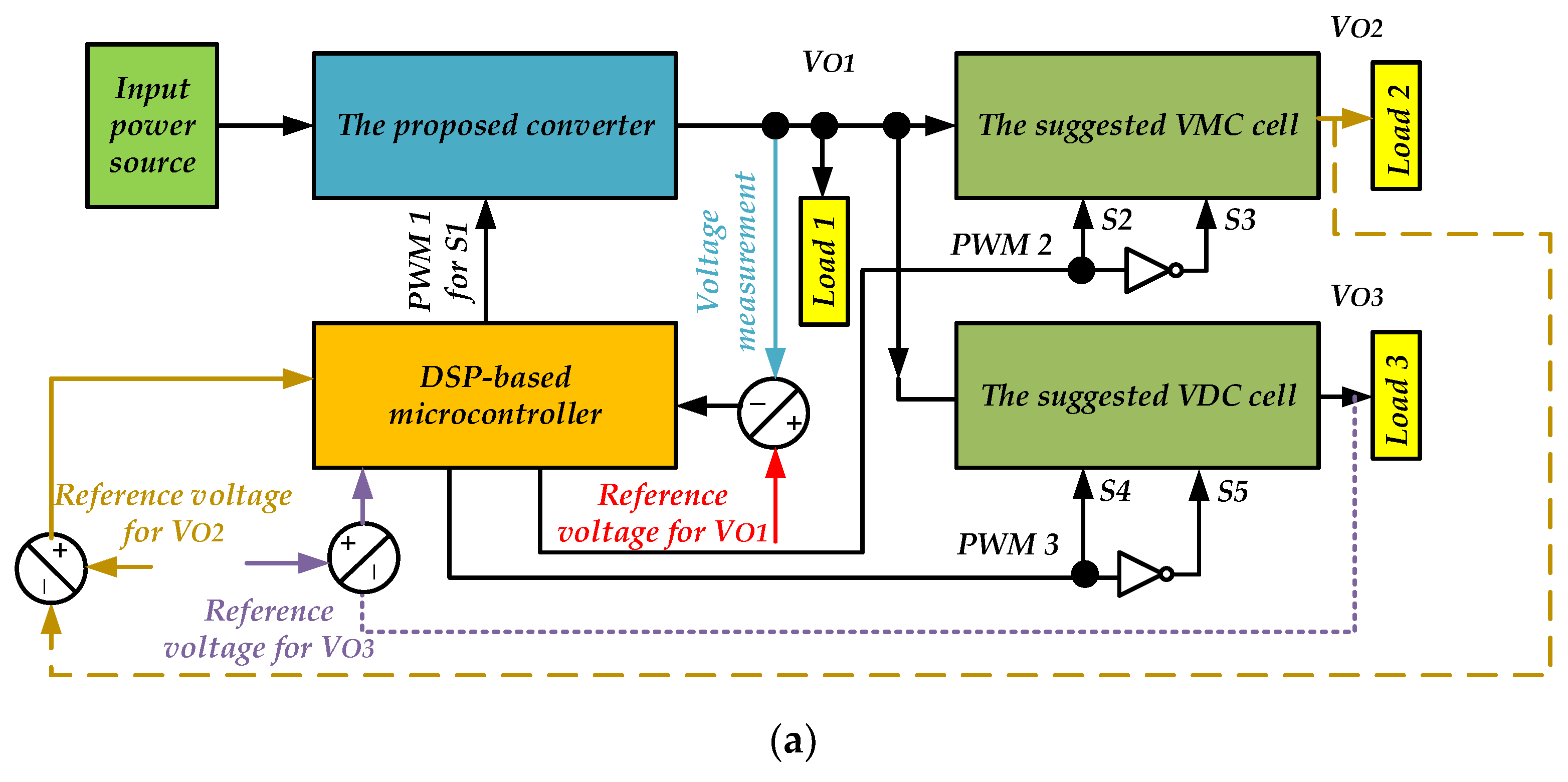
2.5. Control Process
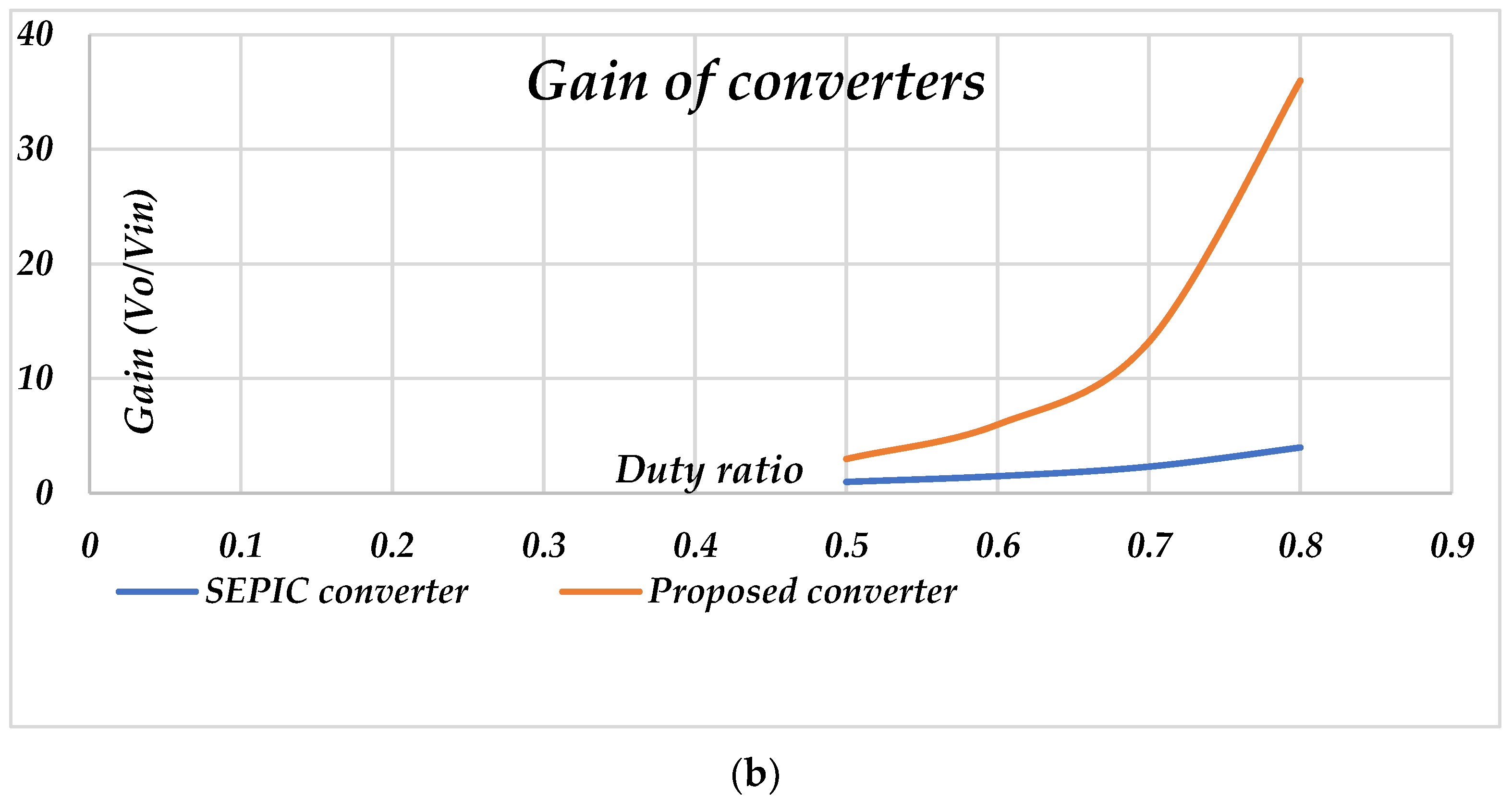
3. Results and Discussion
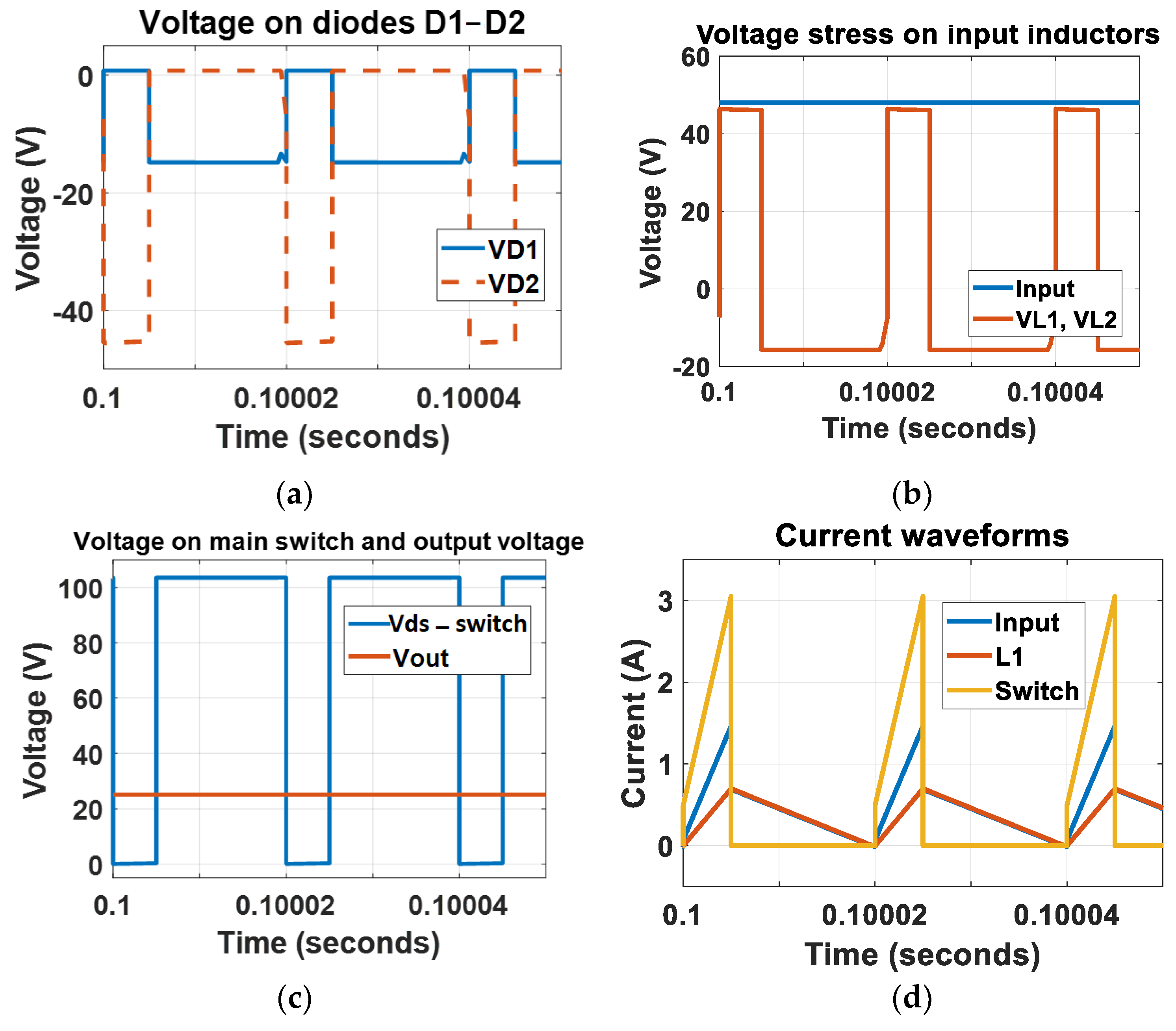
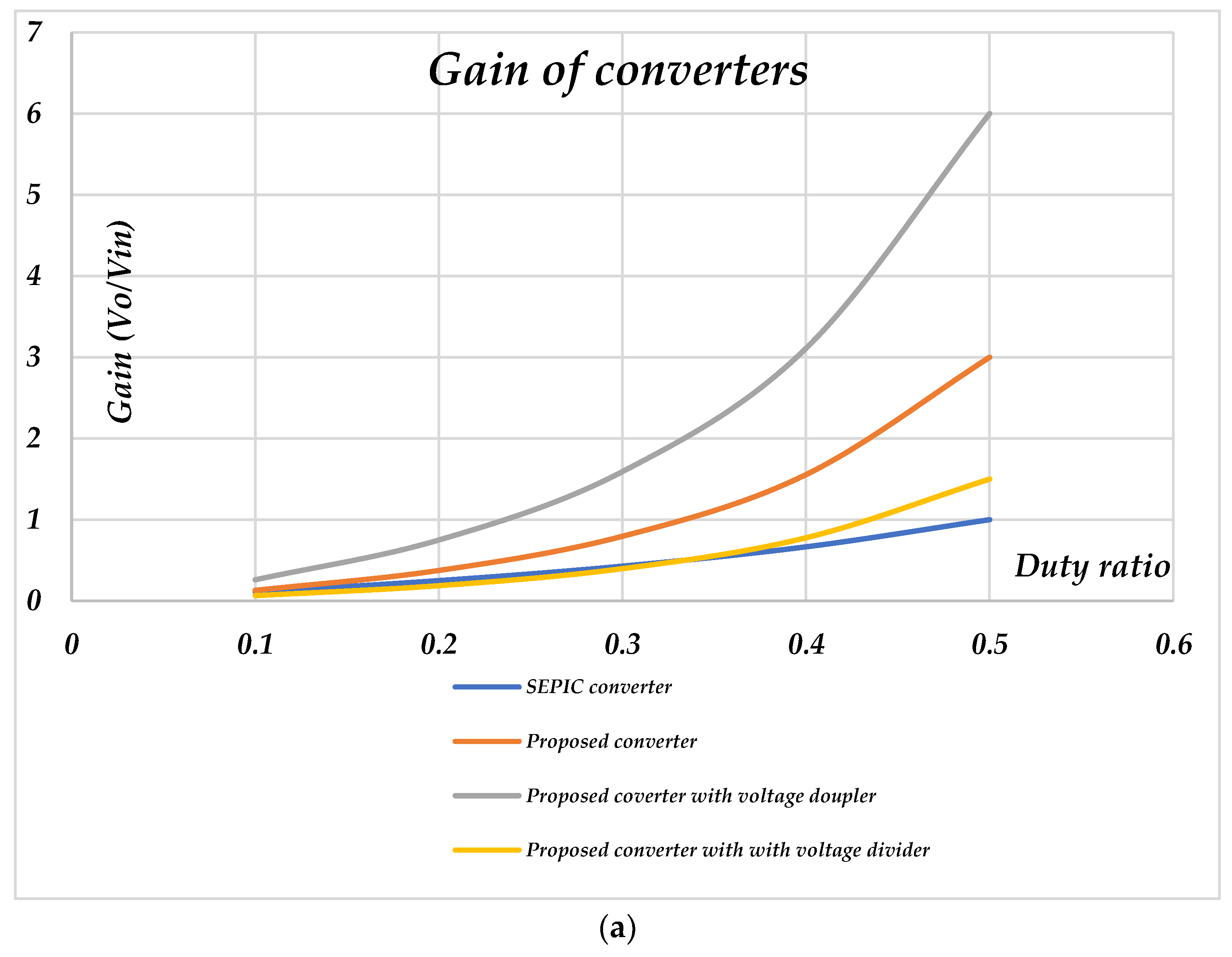
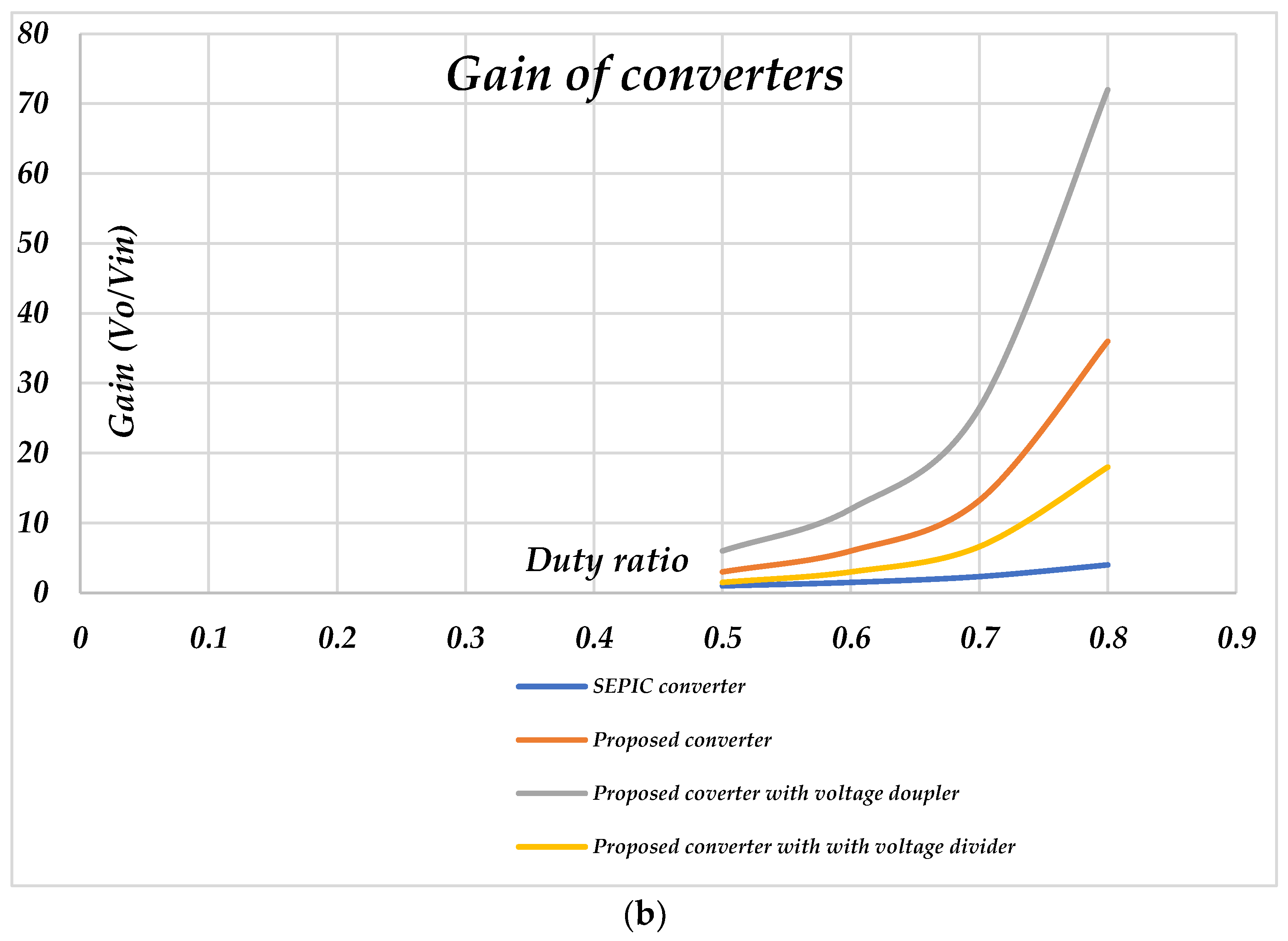
Simulation Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| EVs | Electric vehicles |
| DC | Direct current |
| DSP | Digital signal processing |
| SIMO | Single-input and multi-output |
| PWM | Pulse width modulation |
| EMI | Electromagnetic interference |
| RFI | Radiofrequency interference |
| FLC | Fuzzy logic controller |
| MPC | Model predictive controller |
| PID | Proportional–integral–derivative |
| SEPIC | Single-ended primary inductance converter |
| KVL | Kirchhoff’s voltage law |
| VMC | Voltage multiplier circuit |
| VDC | Voltage divider circuit |
| CCM | Continuous current mode |
| DCM | Discontinuous current mode |
References
- Zhang, S.; Li, H.; Duan, S.; Du, X.; Liu, S.; Wang, P.; Zhang, J. A High-Gain DC-DC Converter with a Wide Range of Output Voltage. Electronics 2023, 12, 3498. [Google Scholar] [CrossRef]
- Rehman, A.U.; Kim, M.; Jung, J.-W. State-Plane Trajectory-Based Duty Control of a Resonant Bidirectional DC/DC Converter with Balanced Capacitors Stress. Mathematics 2023, 11, 3222. [Google Scholar] [CrossRef]
- Ghaderi, D.; Maroti, P.K.; Sanjeevikumar, P.; Holm-Nielsen, J.B.; Hossain, E.; Nayyar, A. A Modified Step-Up Converter with Small Signal Analysis-Based Controller for Renewable Resource Applications. Appl. Sci. 2020, 10, 102. [Google Scholar] [CrossRef]
- Khan, M.S.; Nag, S.S.; Das, A.; Yoon, C. Analysis and Control of an Input-Parallel Output-Series Connected Buck-Boost DC–DC Converter for Electric Vehicle Powertrains. IEEE Trans. Transp. Electrif. 2023, 9, 2015–2025. [Google Scholar] [CrossRef]
- Sayed, S.S.; Massoud, A.M. Review on State-of-the-Art Unidirectional Non-Isolated Power Factor Correction Converters for Short-/Long-Distance Electric Vehicles. IEEE Access 2022, 10, 11308–11340. [Google Scholar] [CrossRef]
- Qiu, Y.; Xu, M.; Yao, K.; Sun, J.; Lee, F.C. Multifrequency Small-Signal Model for Buck and Multiphase Buck Converters. IEEE Trans. Power Electron. 2006, 21, 1185–1192. [Google Scholar] [CrossRef]
- Ertekin, D. A high gain switched-inductor-capacitor DC-DC boost converter for photovoltaic-based micro-grid applications. CSEE J. Power Energy Syst. 2023, 125, 1–19. [Google Scholar]
- Qi, Q.; Ghaderi, D.; Guerrero, J.M. Guerrero, Sliding mode controller-based switched-capacitor-based high DC gain and low voltage stress DC-DC boost converter for photovoltaic applications. Int. J. Electr. Power Energy Syst. 2021, 125, 106496. [Google Scholar] [CrossRef]
- Chandrasekar, B.; Nallaperumal, C.; Padmanaban, S.; Bhaskar, M.S.; Holm-Nielsen, J.B.; Leonowicz, Z.; Masebinu, S.O. Non-Isolated High-Gain Triple Port DC–DC Buck-Boost Converter with Positive Output Voltage for Photovoltaic Applications. IEEE Access 2020, 8, 113649–113666. [Google Scholar] [CrossRef]
- Markkassery, S.; Saradagi, A.; Mahindrakar, A.D.; Lakshminarasamma, N.; Pasumarthy, R. Modeling, Design and Control of Non-isolated Single-Input Multi-Output Zeta–Buck–Boost Converter. IEEE Trans. Ind. Appl. 2020, 56, 3904–3918. [Google Scholar] [CrossRef]
- Givi, H.; Farjah, E.; Ghanbari, T. A Comprehensive Monitoring System for Online Fault Diagnosis and Aging Detection of Non-Isolated DC–DC Converters’ Components. IEEE Trans. Power Electron. 2019, 34, 6858–6875. [Google Scholar] [CrossRef]
- Ahmed, H.F.; Moursi, M.S.E.; Zahawi, B.; Hosani, K.A.; Khan, A.A. Single-Phase Symmetric-Bipolar-Type High-Frequency Isolated Buck-Boost AC–AC Converter with Continuous Input and Output Currents. IEEE Trans. Power Electron. 2021, 36, 11579–11592. [Google Scholar] [CrossRef]
- Kim, J.; Ryu, S.W.; Kim, M.; Jung, J.W. Triple-Mode Isolated Resonant Buck–Boost Converter over Wide Input Voltage Range for Residential Applications. IEEE Trans. Ind. Electron. 2021, 68, 11087–11099. [Google Scholar] [CrossRef]
- Lu, Y.; Wu, H.; Sun, K.; Xing, Y. A Family of Isolated Buck-Boost Converters Based on Semiactive Rectifiers for High-Output Voltage Applications. IEEE Trans. Power Electron. 2016, 31, 6327–6340. [Google Scholar] [CrossRef]
- Kafle, Y.R.; Hasan, S.U.; Town, G.E. Quasi-Z-source based bidirectional DC-DC converter and its control strategy. Chin. J. Electr. Eng. 2019, 5, 1–9. [Google Scholar] [CrossRef]
- Zeng, J.; Du, X.; Yang, Z. A Multiport Bidirectional DC–DC Converter for Hybrid Renewable Energy System Integration. IEEE Trans. Power Electron. 2021, 36, 12281–12291. [Google Scholar] [CrossRef]
- Li, R.; Shi, F. Control and Optimization of Residential Photovoltaic Power Generation System with High Efficiency Isolated Bidirectional DC–DC Converter. IEEE Access 2019, 7, 116107–116122. [Google Scholar] [CrossRef]
- Chen, X.; Pise, A.A.; Batarseh, I. Magnetics-Based Efficiency Optimization for Low Power Cascaded-Buck-Boost Converter. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 5611–5623. [Google Scholar] [CrossRef]
- Pollet, B.; Despesse, G.; Costa, F. A New Non-Isolated Low-Power Inductorless Piezoelectric DC–DC Converter. IEEE Trans. Power Electron. 2019, 34, 11002–11013. [Google Scholar] [CrossRef]
- Kothapalli, K.R.; Ramteke, M.R.; Suryawanshi, H.M. ZVS–ZCS High Step-Up/Step-Down Isolated Bidirectional DC–DC Converter for DC Microgrid. IEEE Trans. Power Electron. 2023, 38, 7733–7745. [Google Scholar] [CrossRef]
- Hong, T.; Geng, Z.; Qi, K.; Zhao, X.; Ambrosio, J.; Gu, D. A Wide Range Unidirectional Isolated DC-DC Converter for Fuel Cell Electric Vehicles. IEEE Trans. Ind. Electron. 2021, 68, 5932–5943. [Google Scholar] [CrossRef]
- Oluwasogo, E.S.; Cha, H.; Nguyen, T.T. Beta-Quasi-Z-Source (β-qZS) DC–DC Converter without Duty Cycle Constraint for Wide Input Voltage Applications. IEEE Trans. Ind. Electron. 2022, 69, 12784–12794. [Google Scholar] [CrossRef]
- Wu, H.; Mu, T.; Ge, H.; Xing, Y. Full-Range Soft-Switching-Isolated Buck-Boost Converters with Integrated Interleaved Boost Converter and Phase-Shifted Control. IEEE Trans. Power Electron. 2016, 31, 987–999. [Google Scholar] [CrossRef]
- Ghaderi, D. Influences of the Switched-inductor and Switched-capacitor Blocks on the Gain of an Improved Step-up Converter. In Proceedings of the 2020 12th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 26–28 November 2020; pp. 226–232. [Google Scholar]
- Sabir, B.; Lu, S.-D.; Liu, H.-D.; Lin, C.-H.; Sarwar, A.; Huang, L.-Y. A Novel Isolated Intelligent Adjustable Buck-Boost Converter with Hill Climbing MPPT Algorithm for Solar Power Systems. Processes 2023, 11, 1010. [Google Scholar] [CrossRef]
- Dimitrov, B.; Hayatleh, K.; Barker, S.; Collier, G.; Sharkh, S.; Cruden, A. A Buck-Boost Transformerless DC–DC Converter Based on IGBT Modules for Fast Charge of Electric Vehicles. Electronics 2020, 9, 397. [Google Scholar] [CrossRef]
- Zheng, W.; Hu, C.; Zhao, B.; Su, X.-B.; Wang, G.; Hou, X.-W.; Gu, B. A Two-Stage DC/DC Isolated High-Voltage Converter with Zero-Voltage Switching and Zero-Current Switching Applied in Electronic Power Conditioners. Energies 2022, 15, 6378. [Google Scholar] [CrossRef]
- Mohammadi, M.R. A Lossless Turn-on Snubber for Reducing Diode Reverse Recovery Losses in Bidirectional Buck/Boost Converter. IEEE Trans. Ind. Electron. 2020, 67, 1396–1399. [Google Scholar] [CrossRef]
- Cao, Y.; Bai, Y.; Mitrovic, V.; Fan, B.; Dong, D.; Burgos, R.; Boroyevich, D.; Moorthy, R.K.; Chinthavali, M. A Three-Level Buck–Boost Converter with Planar Coupled Inductor and Common-Mode Noise Suppression. IEEE Trans. Power Electron. 2023, 38, 10483–10500. [Google Scholar] [CrossRef]
- Lee, H.-S.; Yun, J.-J. High-Efficiency Bidirectional Buck–Boost Converter for Photovoltaic and Energy Storage Systems in a Smart Grid. IEEE Trans. Power Electron. 2019, 34, 4316–4328. [Google Scholar] [CrossRef]
- Singh, A.K.; Mishra, A.K.; Gupta, K.K.; Bhatnagar, P.; Kim, T. An Integrated Converter with Reduced Components for Electric Vehicles Utilizing Solar and Grid Power Sources. IEEE Trans. Transp. Electrif. 2020, 6, 439–452. [Google Scholar] [CrossRef]
- Wu, Y.-E.; Tai, C.-H. Novel Bidirectional Isolated DC/DC Converter with High Gain Ratio and Wide Input Voltage for Electric Vehicle Storage Systems. Batteries 2022, 8, 240. [Google Scholar] [CrossRef]
- Al Attar, H.; Hamida, M.A.; Ghanes, M.; Taleb, M. Review on Modeling and Control Strategies of DC–DC LLC Converters for Bidirectional Electric Vehicle Charger Applications. Energies 2023, 16, 3946. [Google Scholar] [CrossRef]
- Kart, S.; Demir, F.; Kocaarslan, İ.; Genc, N. Increasing PEM fuel cell performance via fuzzy-logic controlled cascaded DC-DC boost converter. Int. J. Hydrogen Energy, 2023, in press. [CrossRef]
- Tekin, H.; Bulut, K.; Ertekin, D. A novel switched-capacitor and fuzzy logic-based quadratic boost converter with mitigated voltage stress, applicable for DC micro-grid. Electr. Eng. 2022, 104, 4391–4413. [Google Scholar] [CrossRef]
- Bayrak, G.; Ghaderi, D. An improved step-up converter with a developed real-timefuzzy-based MPPT controller for PV-based residential applications. Int. Trans. Electr. Energy Syst. 2019, 29, e12140. [Google Scholar] [CrossRef]
- Chelladurai, B.; Sundarabalan, C.K.; Santhanam, S.N.; Guerrero, J.M. Interval Type-2 Fuzzy Logic Controlled Shunt Converter Coupled Novel High-Quality Charging Scheme for Electric Vehicles. IEEE Trans. Ind. Inform. 2021, 17, 6084–6093. [Google Scholar] [CrossRef]
- Babes, B.; Mekhilef, S.; Boutaghane, A.; Rahmani, L. Fuzzy Approximation-Based Fractional-Order Nonsingular Terminal Sliding Mode Controller for DC–DC Buck Converters. IEEE Trans. Power Electron. 2022, 37, 2749–2760. [Google Scholar] [CrossRef]
- Guler, N.; Biricik, S.; Bayhan, S.; Komurcugil, H. Model Predictive Control of DC–DC SEPIC Converters with Autotuning Weighting Factor. IEEE Trans. Ind. Electron. 2021, 68, 9433–9443. [Google Scholar] [CrossRef]
- Karamanakos, P.; Geyer, T.; Manias, S. Direct Model Predictive Current Control Strategy of DC–DC Boost Converters. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 337–346. [Google Scholar] [CrossRef]
- Veerachary, M.; Trivedi, A. Linear Matrix Inequality-Based Multivariable Controller Design for Boost Cascaded Charge-Pump-Based Double-Input DC–DC Converter. IEEE Trans. Ind. Appl. 2022, 58, 7515–7528. [Google Scholar] [CrossRef]
- Seo, S.-W.; Choi, H.H. Digital Implementation of Fractional Order PID-Type Controller for Boost DC–DC Converter. IEEE Access 2019, 7, 142652–142662. [Google Scholar] [CrossRef]
- Kobaku, T.; Jeyasenthil, R.; Sahoo, S.; Dragicevic, T. Experimental Verification of Robust PID Controller Under Feedforward Framework for a Nonminimum Phase DC–DC Boost Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3373–3383. [Google Scholar] [CrossRef]
- Kurnaz Araz, H.; Ertekin, D.; Aydın, M. A PID-Controlled High DC Voltage Gain Switched-Inductor and Switched-Capacitor-Based DC-DC Power Buck-Boost Converter Design for Solar Energy Application. J. Innov. Sci. Eng. 2021, 5, 129–142. [Google Scholar] [CrossRef]
- Daniel, W. Hart, Power Electronics; McGraw-Hill: New York, NY, USA, 2011; ISBN 9780071289306, 0071289305. [Google Scholar]
- Kushwaha, R.; Singh, B. An Improved Battery Charger for Electric Vehicle with High Power Factor. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting (IAS), Portland, OR, USA, 23–27 September 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Sharifi, S.; Monfared, M.; Babaei, M. Ferdowsi Rectifiers—Single-Phase Buck-Boost Bridgeless PFC Rectifiers with Low Semiconductor Count. IEEE Trans. Ind. Electron. 2020, 67, 9206–9214. [Google Scholar] [CrossRef]
- Praneeth, A.V.J.S.; Williamson, S.S. Modeling, Design, Analysis, and Control of a Nonisolated Universal On-Board Battery Charger for Electric Transportation. IEEE Trans. Transp. Electrif. 2019, 5, 912–924. [Google Scholar] [CrossRef]
- Kushwaha, R.; Singh, B. A Power Quality Improved EV Charger with Bridgeless Cuk Converter. IEEE Trans. Ind. Appl. 2019, 55, 5190–5203. [Google Scholar] [CrossRef]
- Ananthapadmanabha, B.R.; Maurya, R.; Arya, S.R. Improved Power Quality Switched Inductor Cuk Converter for Battery Charging Applications. IEEE Trans. Power Electron. 2018, 33, 9412–9423. [Google Scholar] [CrossRef]
- Gupta, J.; Kushwaha, R.; Singh, B. Improved Power Quality Transformerless Single-Stage Bridgeless Converter Based Charger for Light Electric Vehicles. IEEE Trans. Power Electron. 2021, 36, 7716–7724. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Compared Buck–Boost Converters | Num. of Inductors | Number of Capacitors | Number of Switches | Number of Diodes | Total Component Number | Operational State | Output Voltage | Efficiency | Cost | Switching Frequency |
|---|---|---|---|---|---|---|---|---|---|---|
| [46] | 2 | 1 | 2 | 4 | 9 | DCM | 48 V | (45–82)% (100–600) W | Medium | 20 kHz |
| [47] | 3 | 3 | 2 | 2 | 10 | DCM | 48 V | (89–94)% (60–300) W | Medium | 60 kHz |
| [48] | 2 | 2 | 2 | 4 | 10 | CCM | 150–450 V | (91–96)% (300–1000) W | Medium | 30 kHz |
| [49] | 4 | 3 | 2 | 4 | 13 | DCM | 300 V | (87–90)% (150–850) W | High | 50 kHz |
| [50] | 3 | 2 | 1 | 6 | 12 | CCM | 48 V | (78–84)% (200–850) W | Medium | 25 kHz |
| [51] | 3 | 2 | 1 | 6 | 12 | CCM | 48 V | (78–84)% (200–850) W | Medium | 25 kHz |
| Proposed | 3 | 2 | 1 | 6 + 4 (for rectifier) | 12 + 4 | CCM | 12–430 V (Vin = 12 V and maximum D = 0.8) | (84–96) % (50–300) V | Medium | 50 kHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tekin, H.; Setrekli, G.; Murtulu, E.; Karşıyaka, H.; Ertekin, D. A Proposed Single-Input Multi-Output Battery-Connected DC–DC Buck–Boost Converter for Automotive Applications. Electronics 2023, 12, 4381. https://doi.org/10.3390/electronics12204381
Tekin H, Setrekli G, Murtulu E, Karşıyaka H, Ertekin D. A Proposed Single-Input Multi-Output Battery-Connected DC–DC Buck–Boost Converter for Automotive Applications. Electronics. 2023; 12(20):4381. https://doi.org/10.3390/electronics12204381
Chicago/Turabian StyleTekin, Hakan, Göknur Setrekli, Eren Murtulu, Hikmet Karşıyaka, and Davut Ertekin. 2023. "A Proposed Single-Input Multi-Output Battery-Connected DC–DC Buck–Boost Converter for Automotive Applications" Electronics 12, no. 20: 4381. https://doi.org/10.3390/electronics12204381