
Stability Analysis of Chaotic Grey-Wolf Optimized Grid-Tied PV-Hybrid Storage System during Dynamic Conditions



Abstract
:1. Introduction
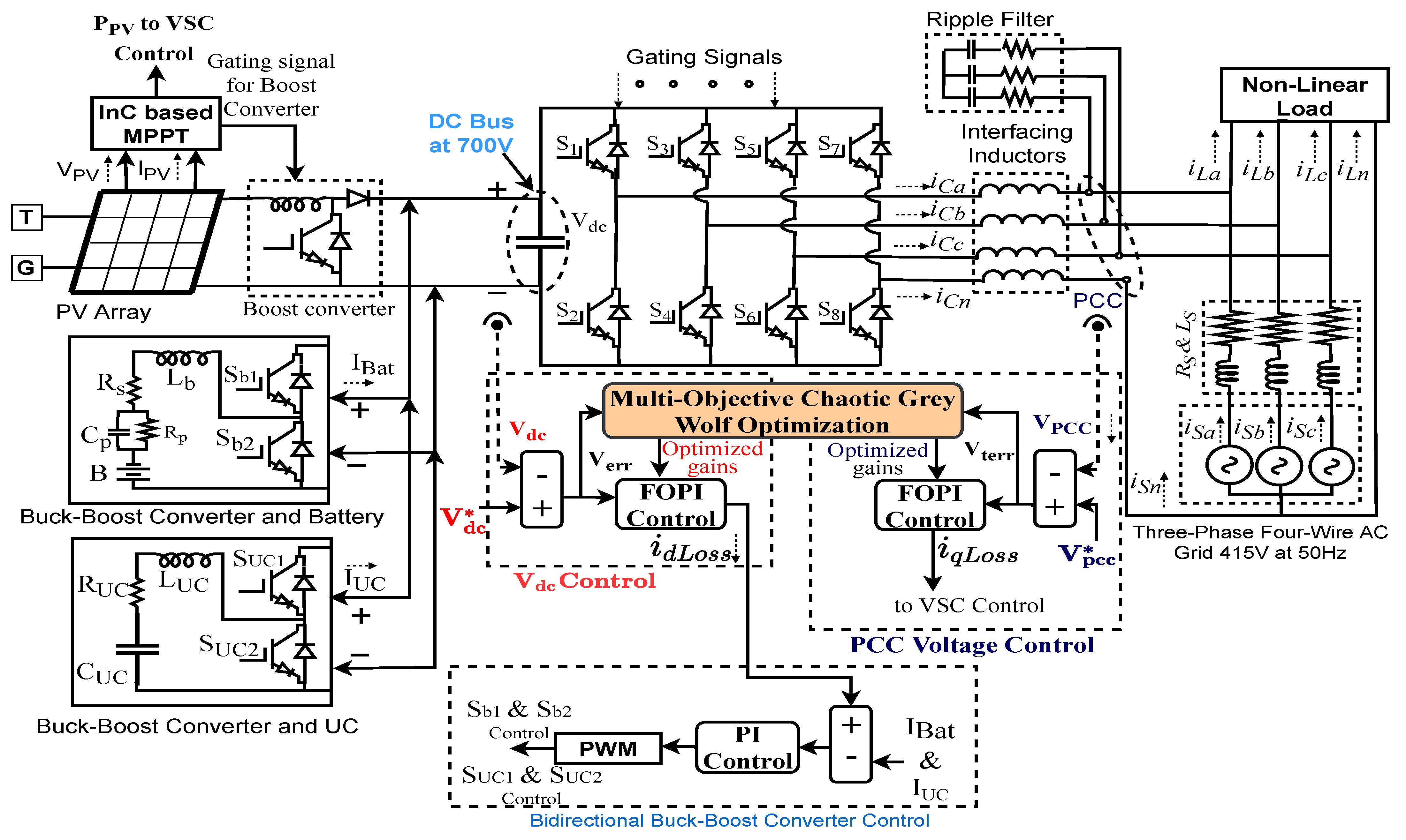
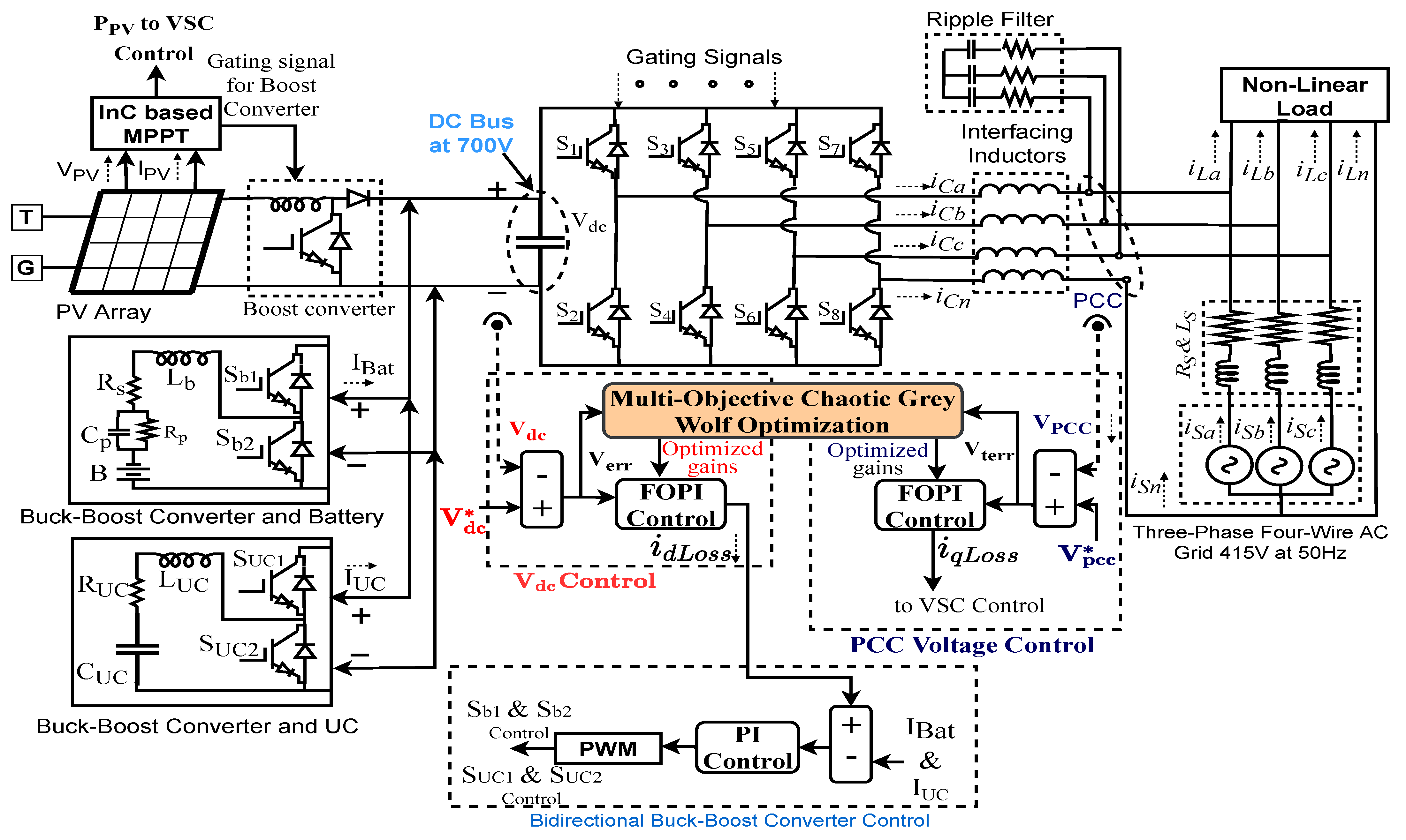
2. System Description
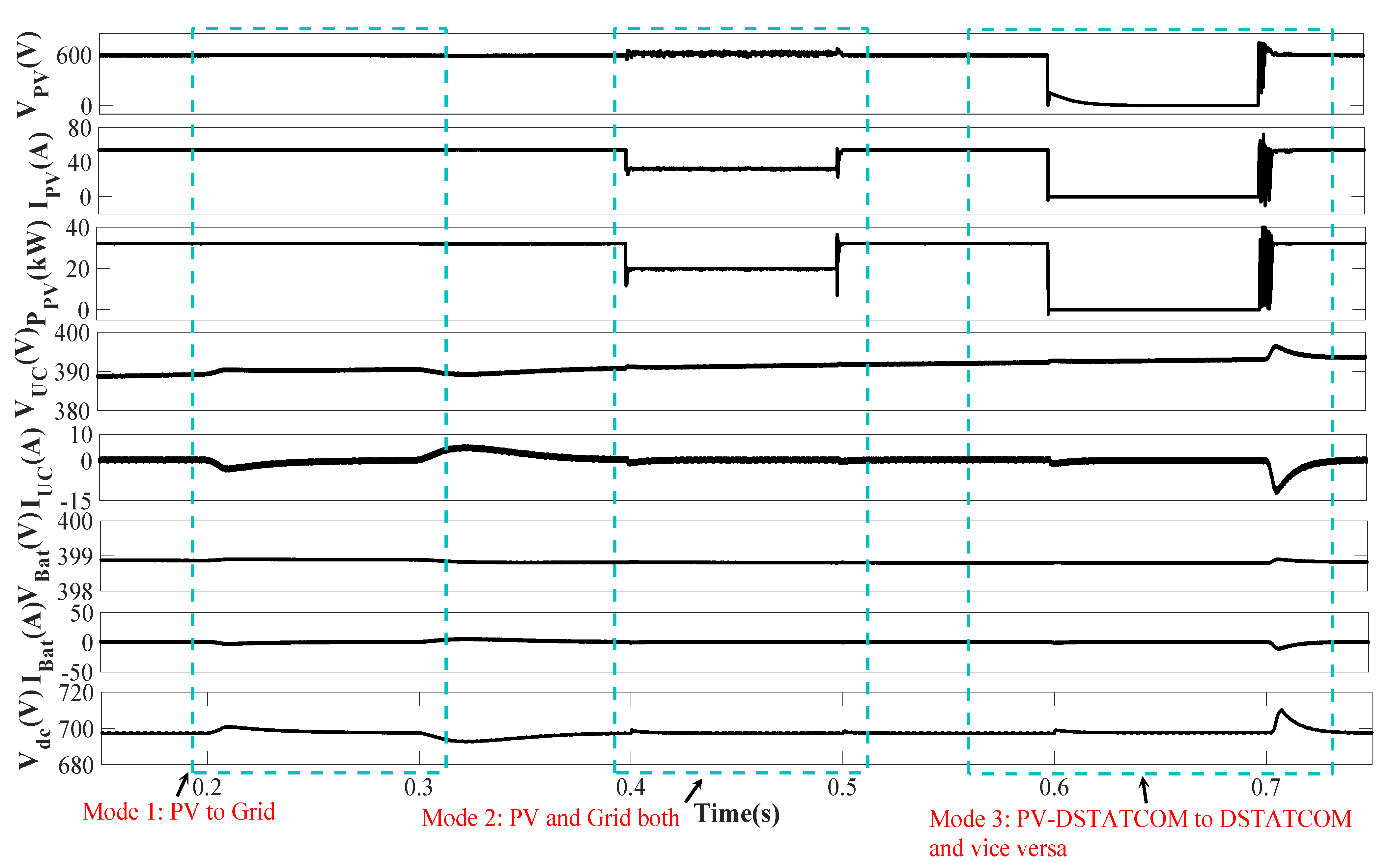
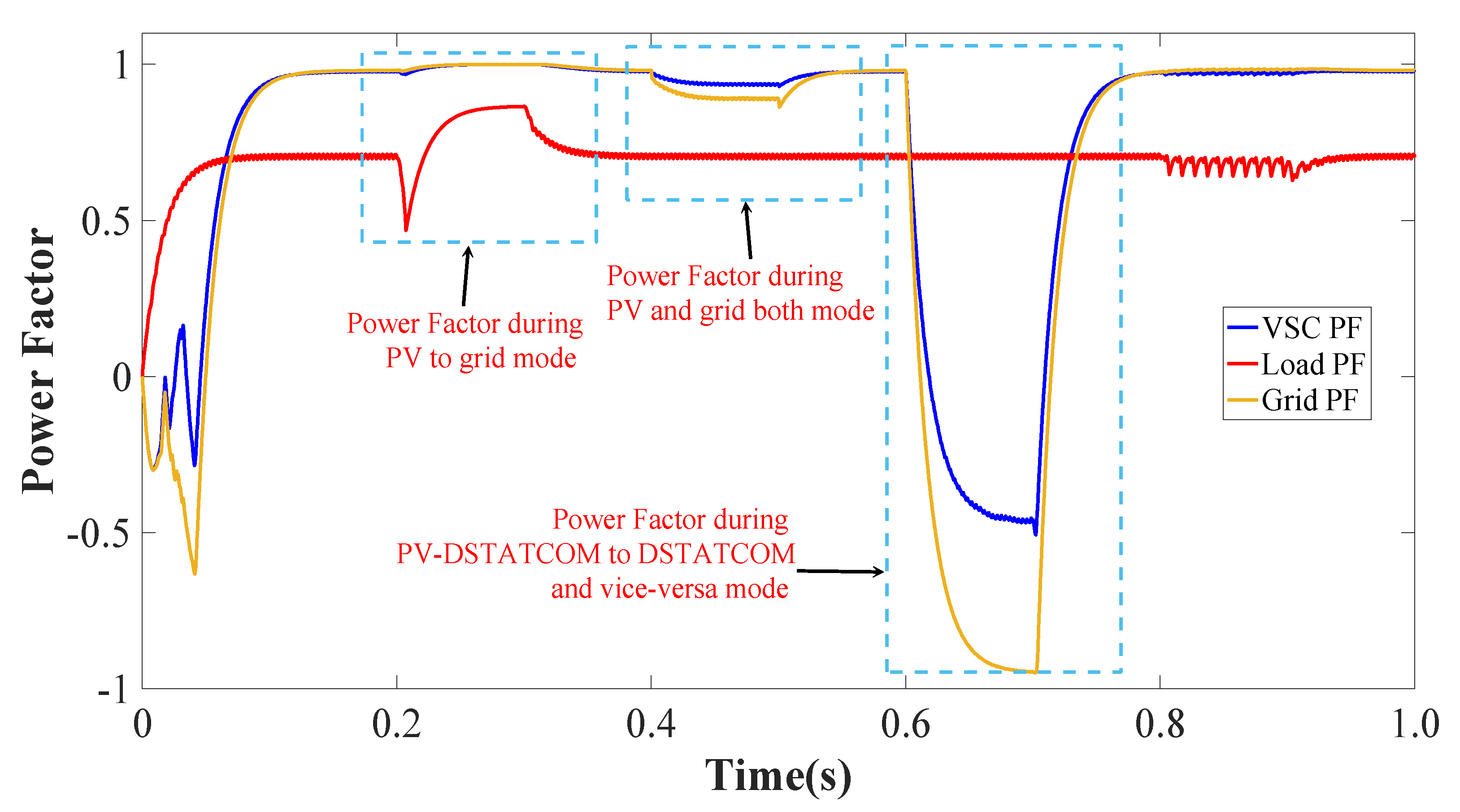
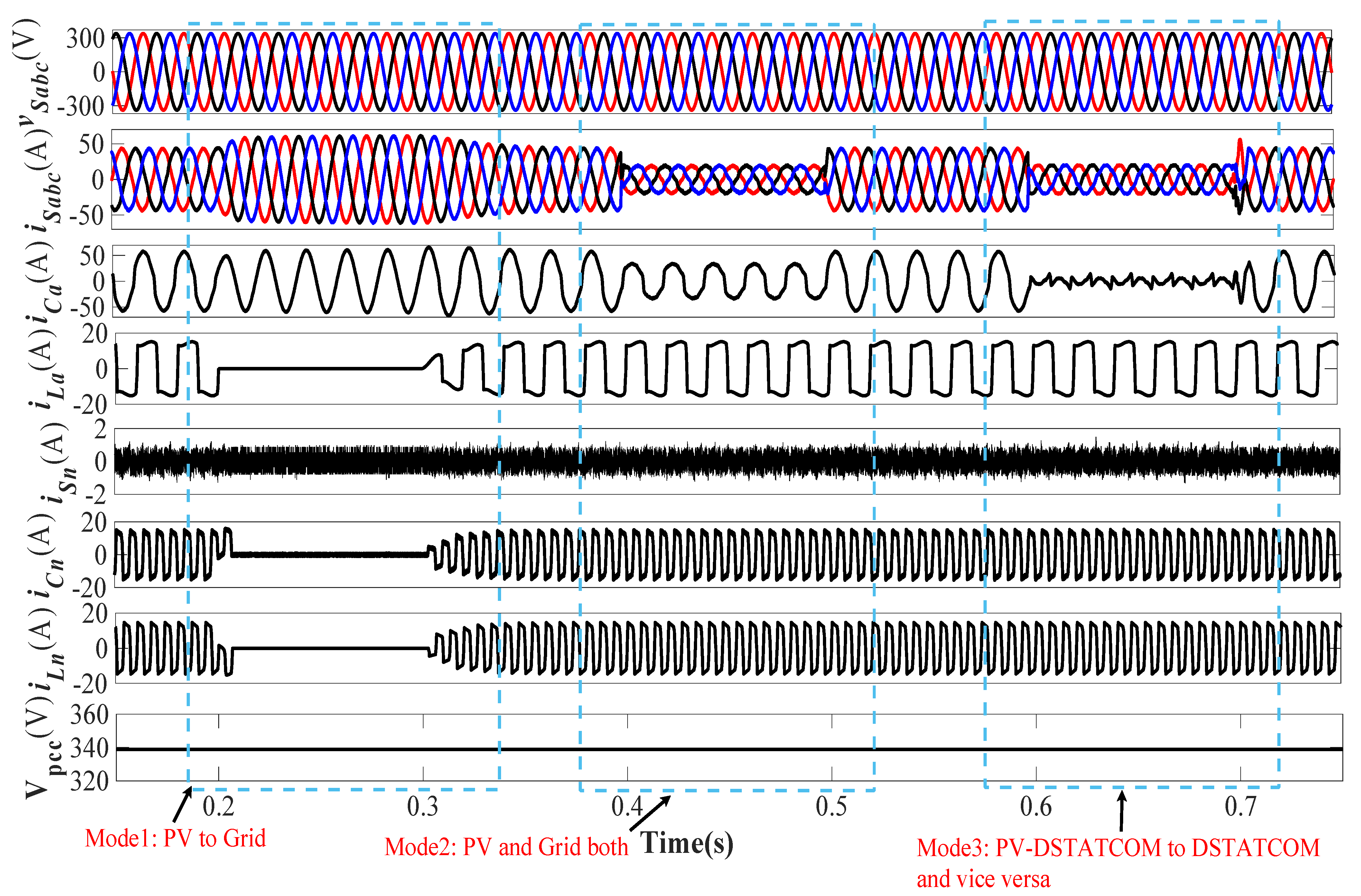
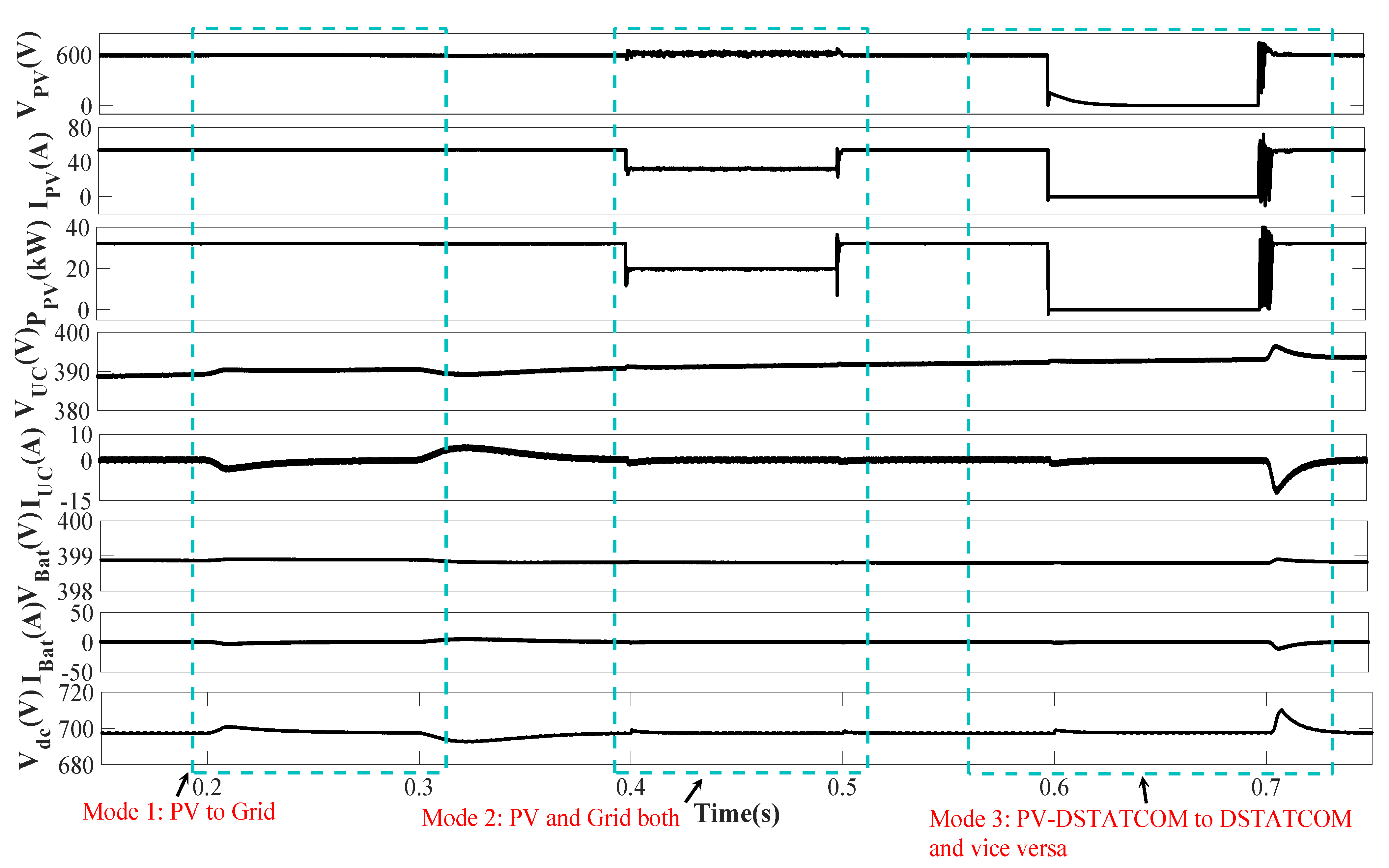
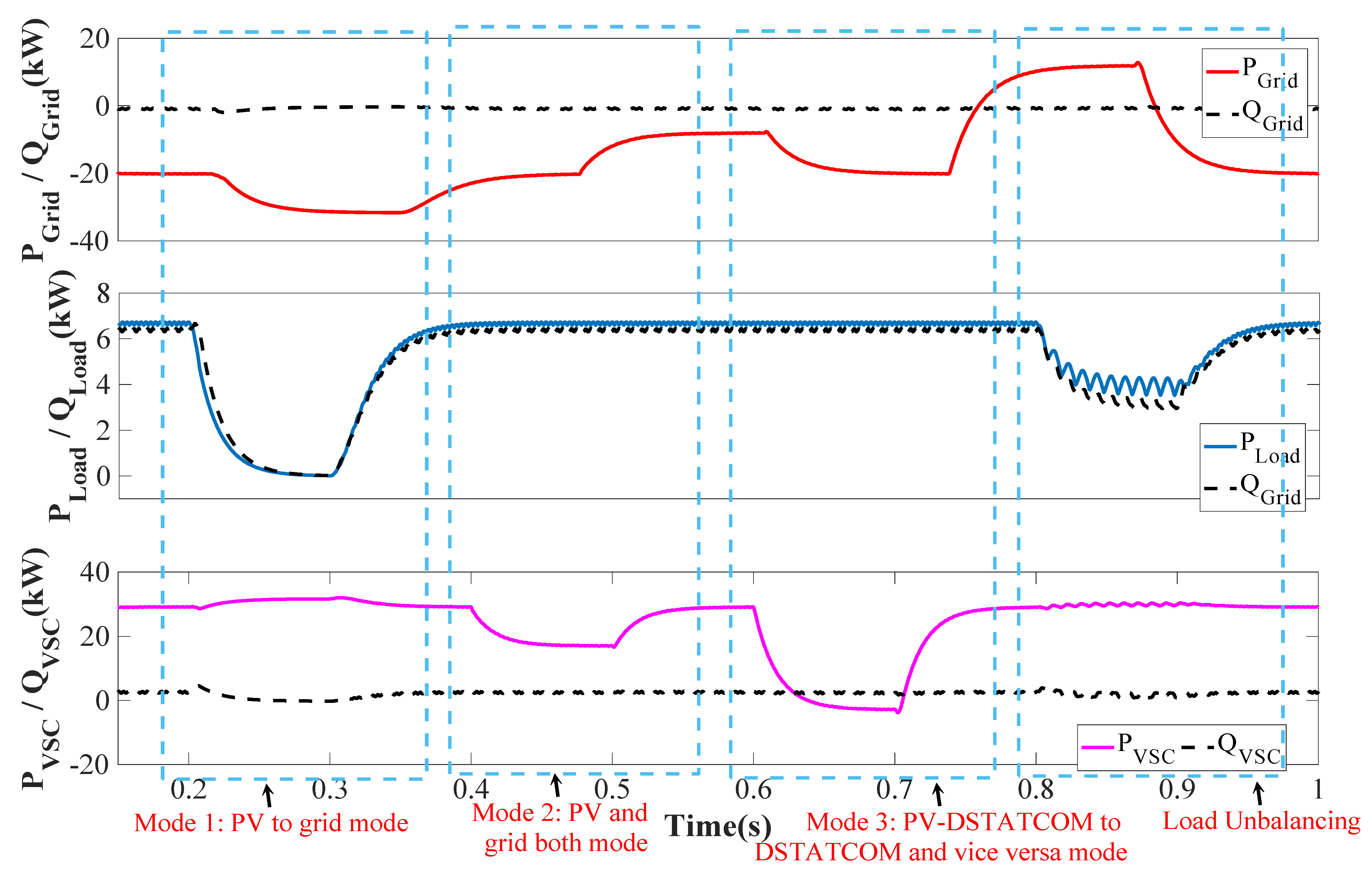
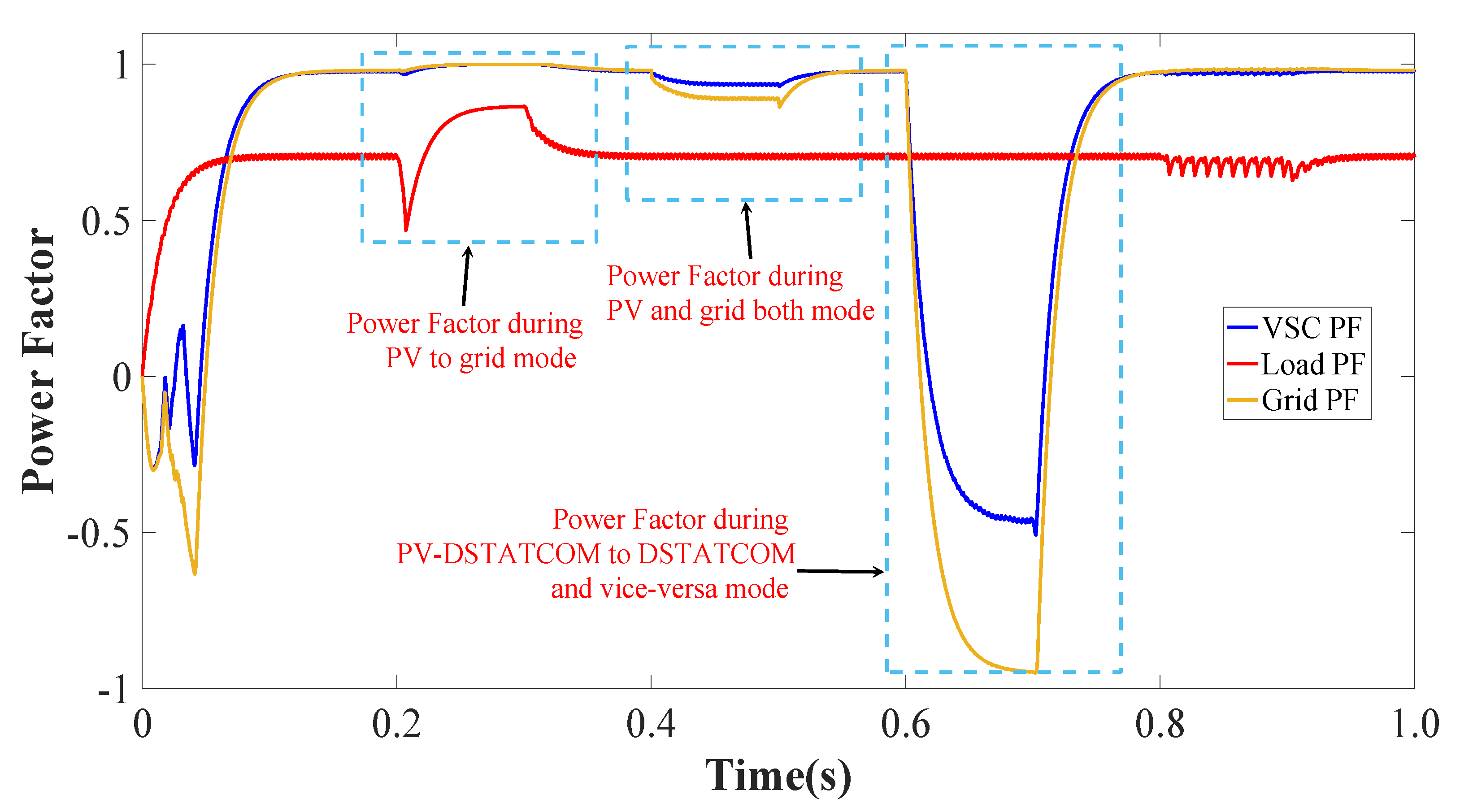
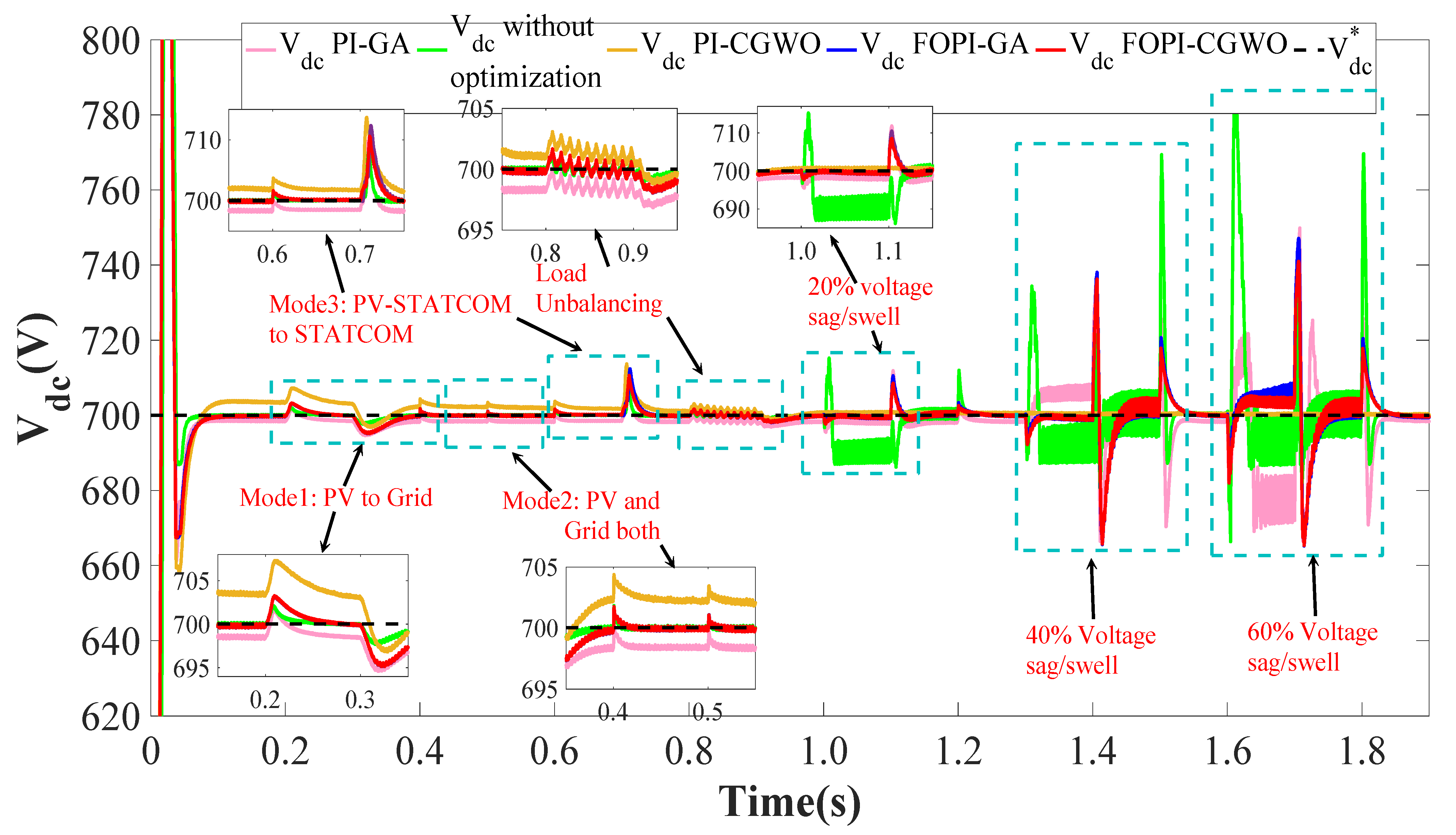
- Smart grid-tied PV operation: The grid-tied PV system performs satisfactorily in three modes: (1) PV to grid mode, (2) PV-DSTATCOM mode, (3) PV-DSTATCOM to DSTATCOM, and vice versa mode.
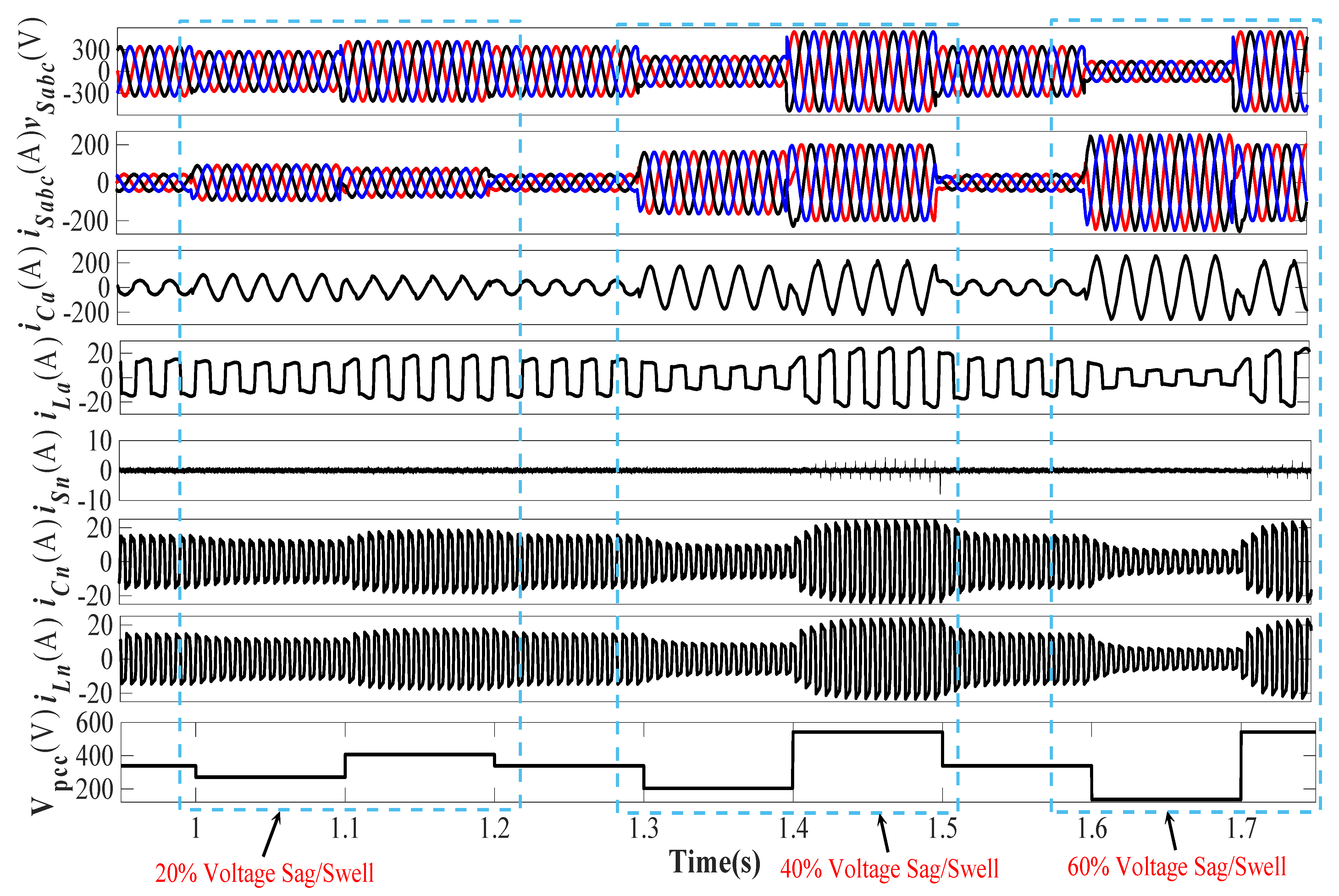
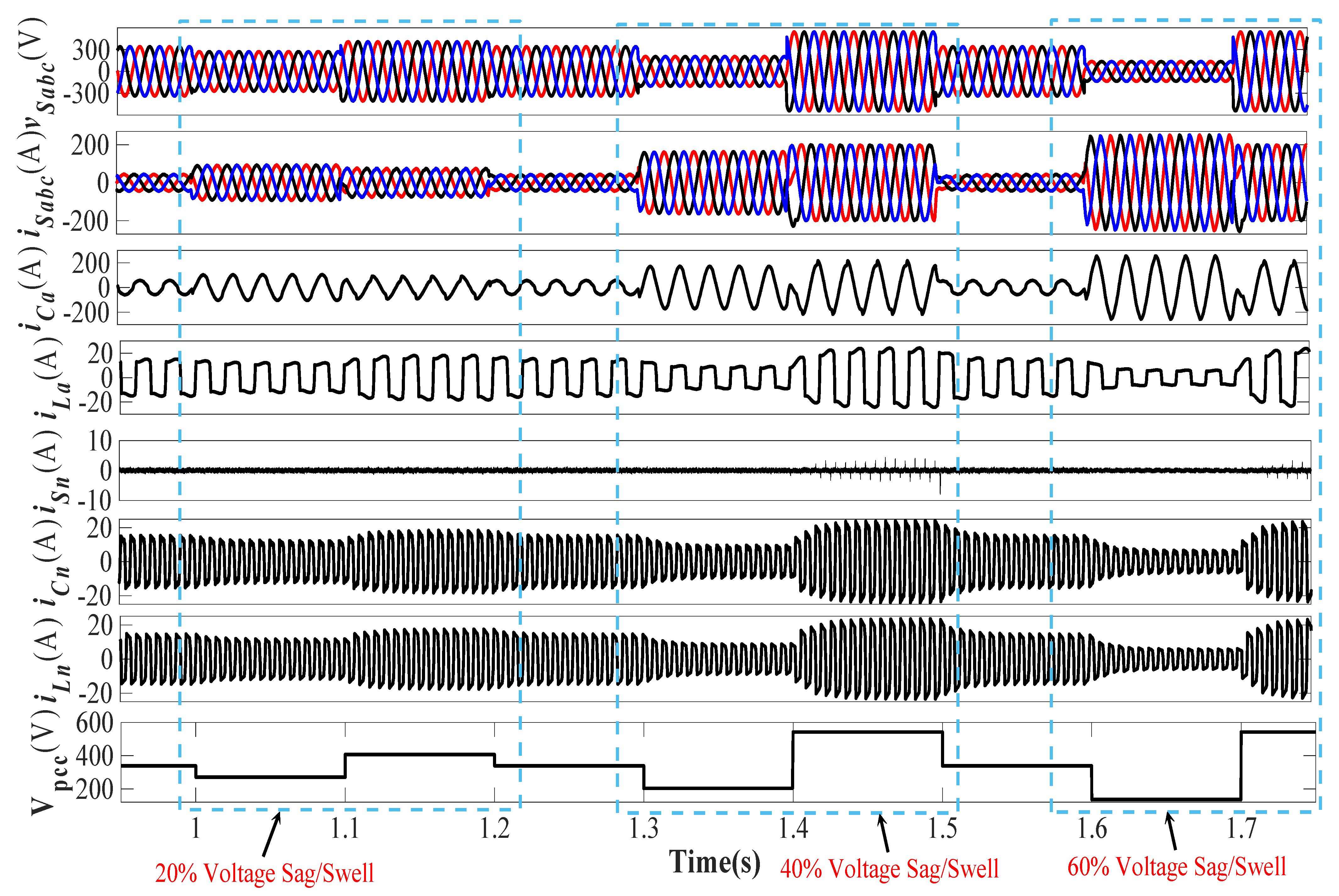
- Dynamic state operations: The presented system is observed under weak grid conditions like load unbalancing and deep voltage sag/sell condition, i.e., 20%, 40%, and 60%, respectively.
- Multi-functional operation: The proposed system performs multiple operations, i.e., load balancing, harmonics elimination, active and reactive power control, etc.
- DC and AC bus stability performance: The DC and AC bus control is provided by CGWO tuned FOPI controller to stabilize the system during dynamic conditions.
- HESS: The HESS ensures continuous supply to critical load and enhances the system’s power quality by suppressing the second-harmonics content at the DC bus.
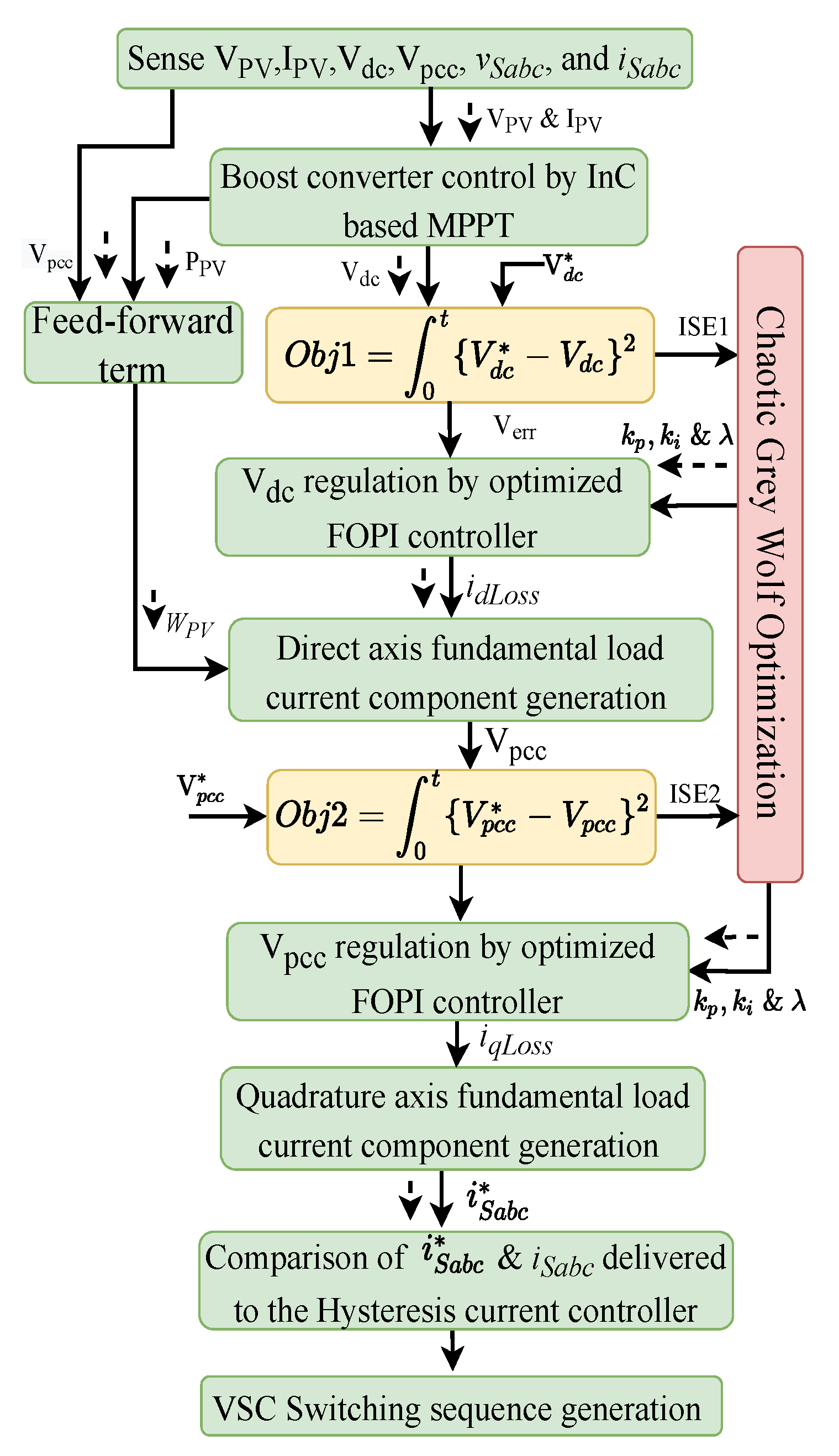
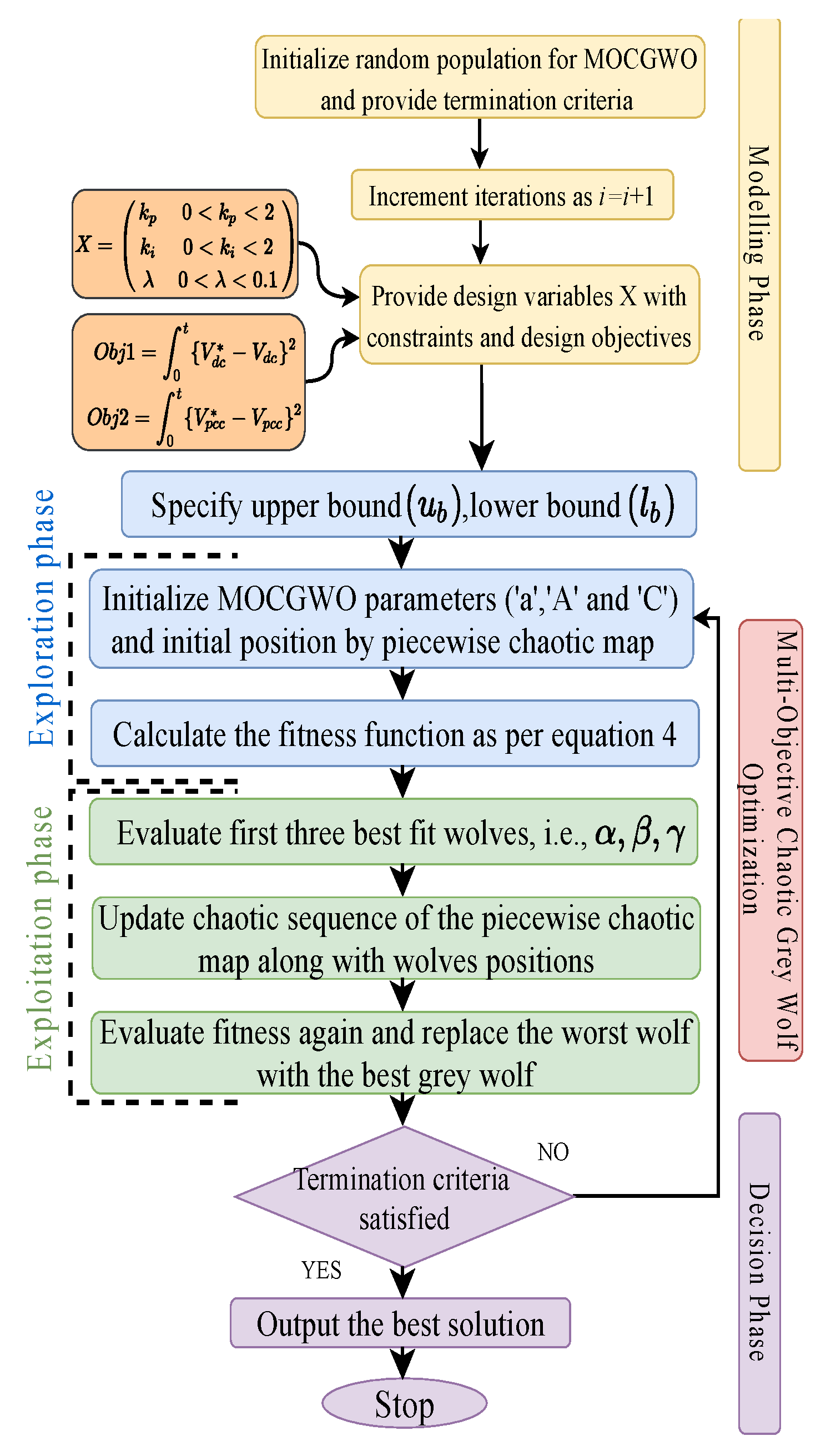
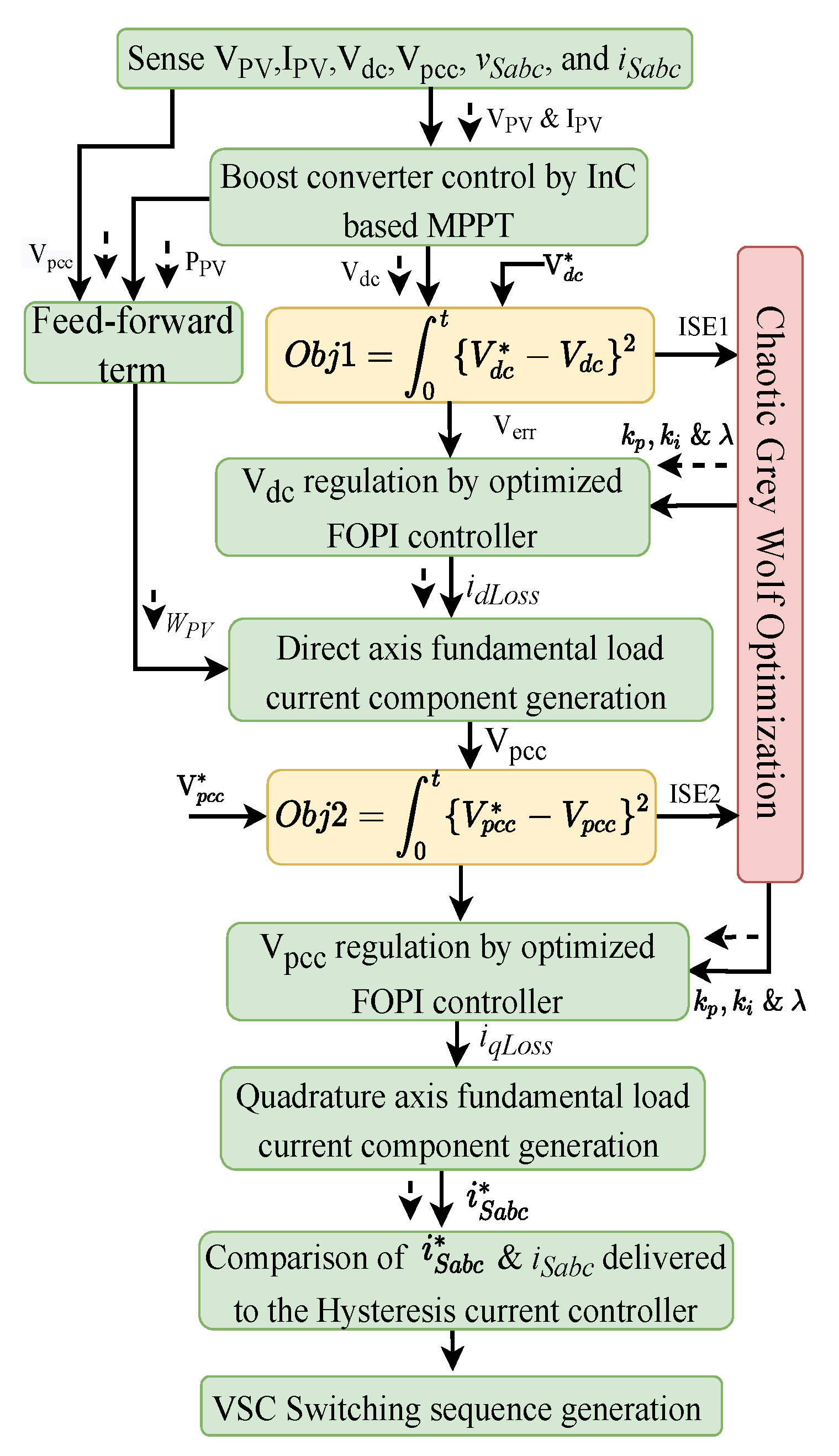
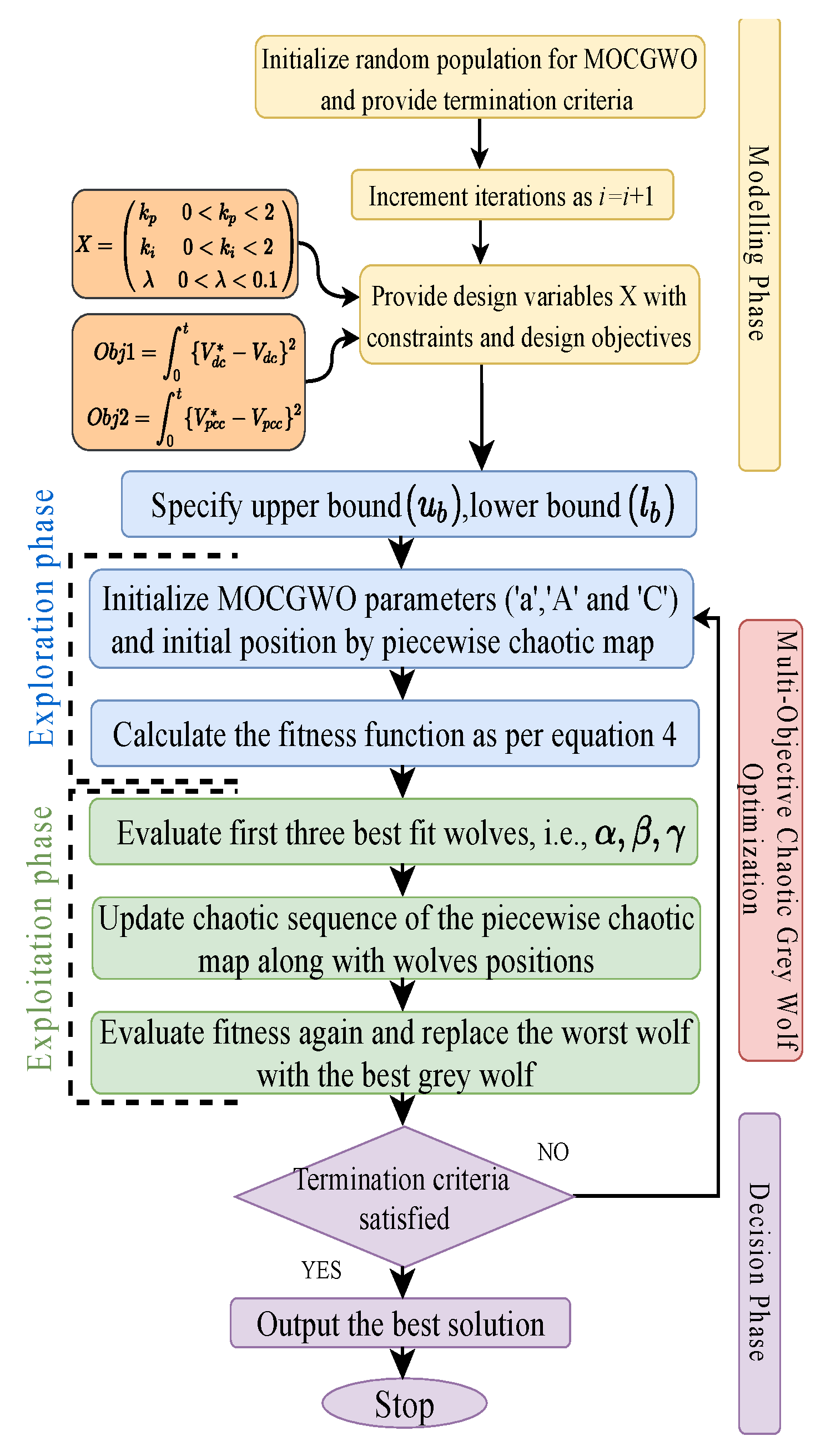
3. Implemented Research Methodology
Multi-Objective Chaotic Grey Wolf Optimization Technique
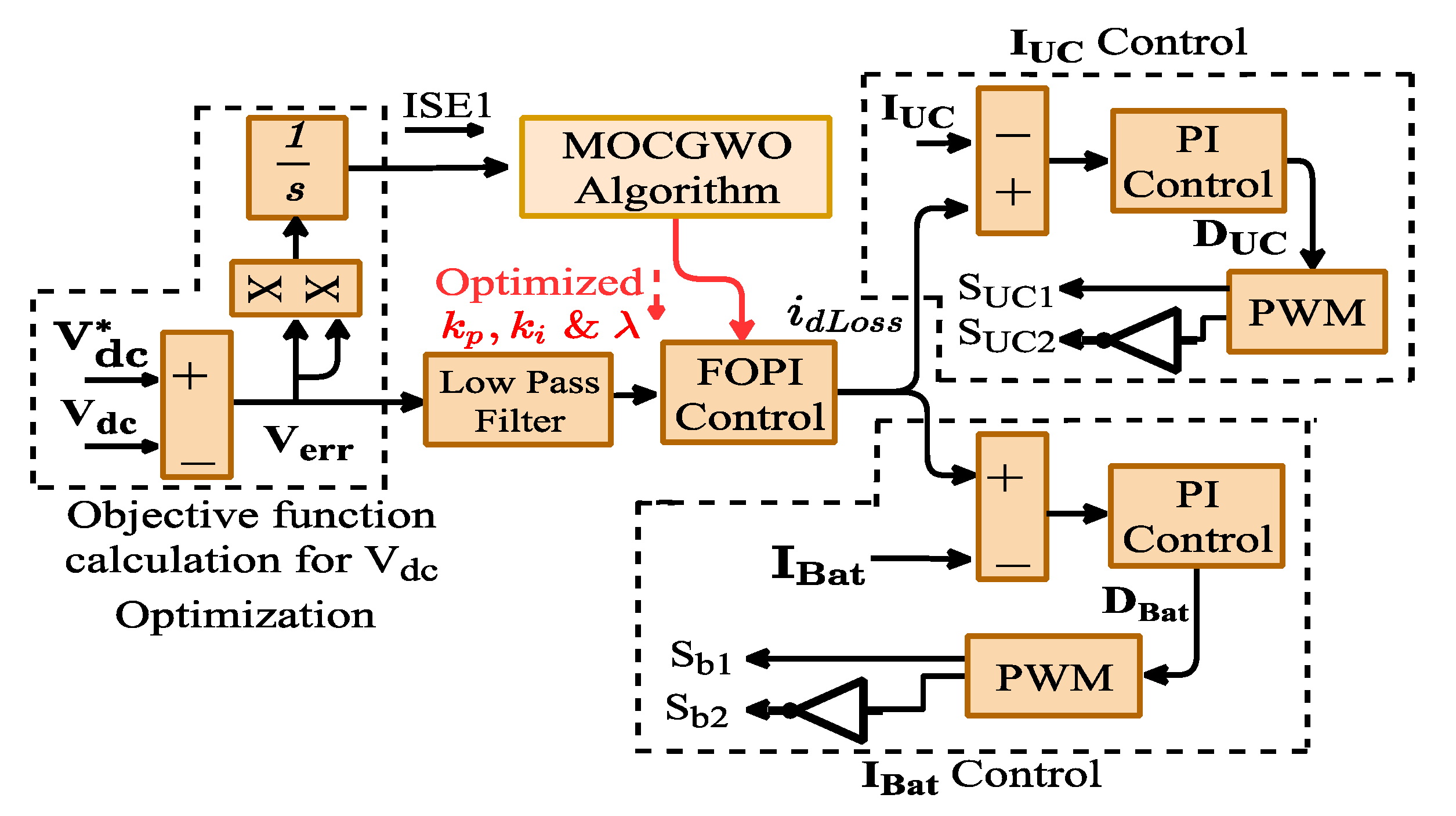
4. Controlling Strategies
4.1. DC Bus Voltage and HESS Current Control
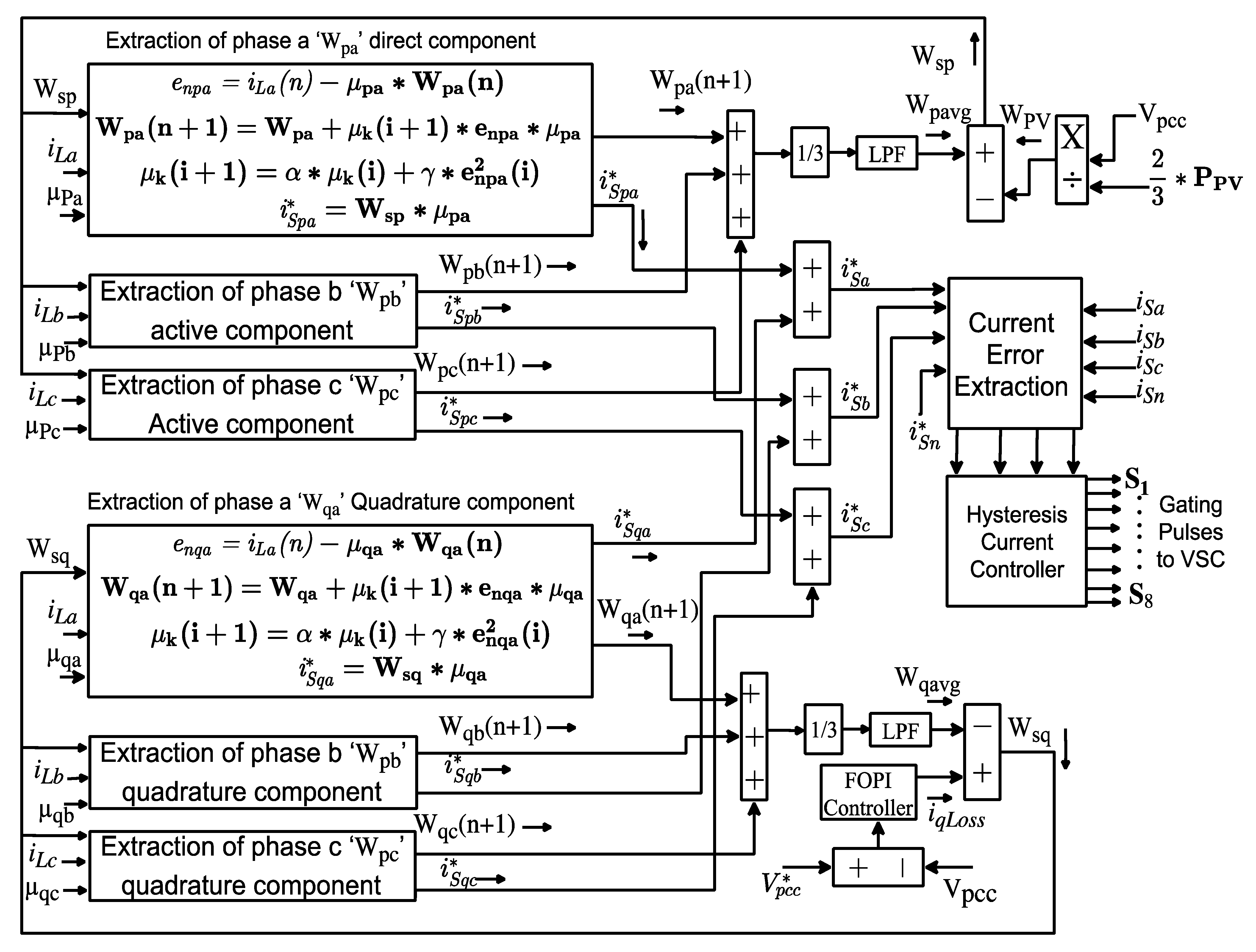
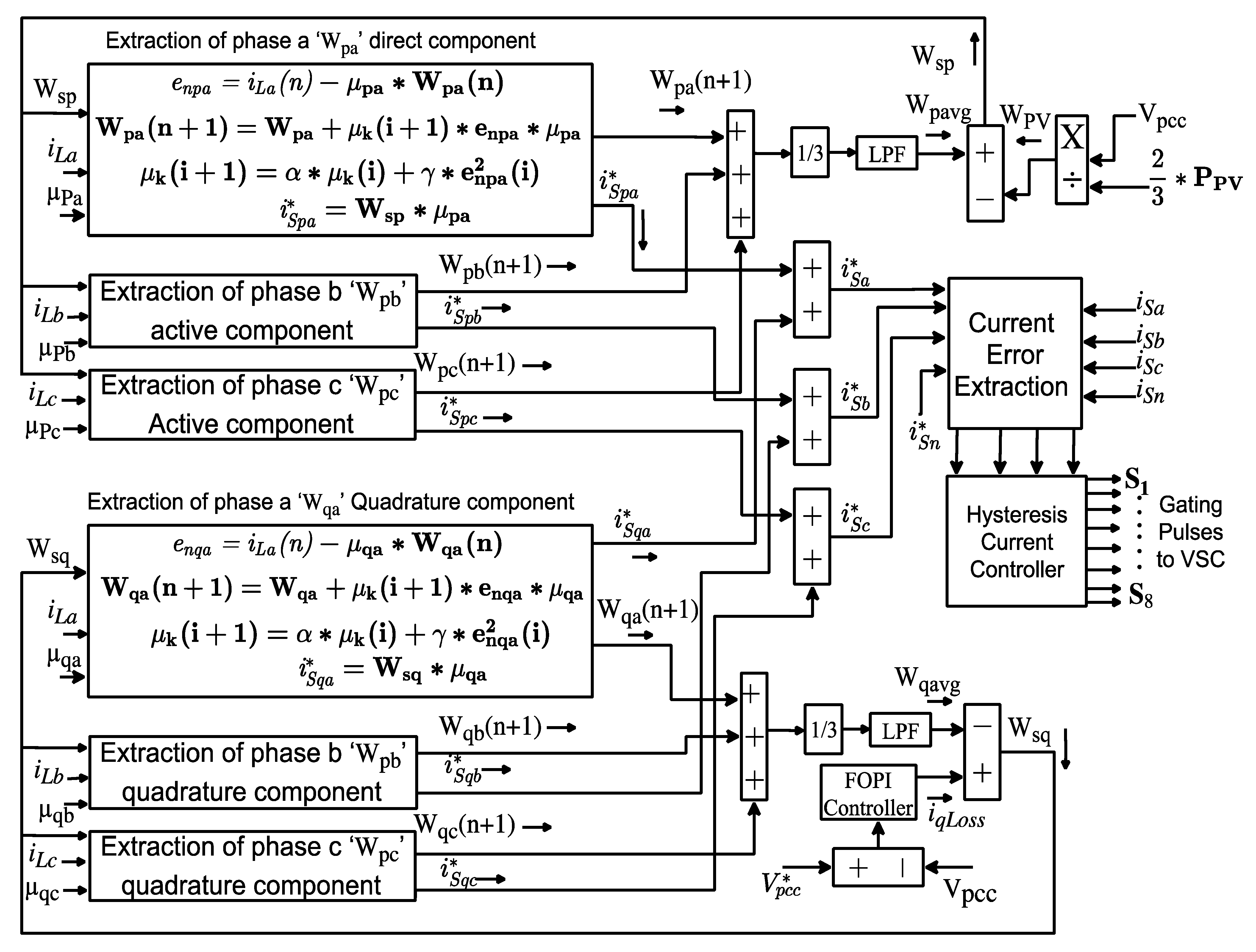
4.2. Voltage Source Converter Control
5. Results and Discussion
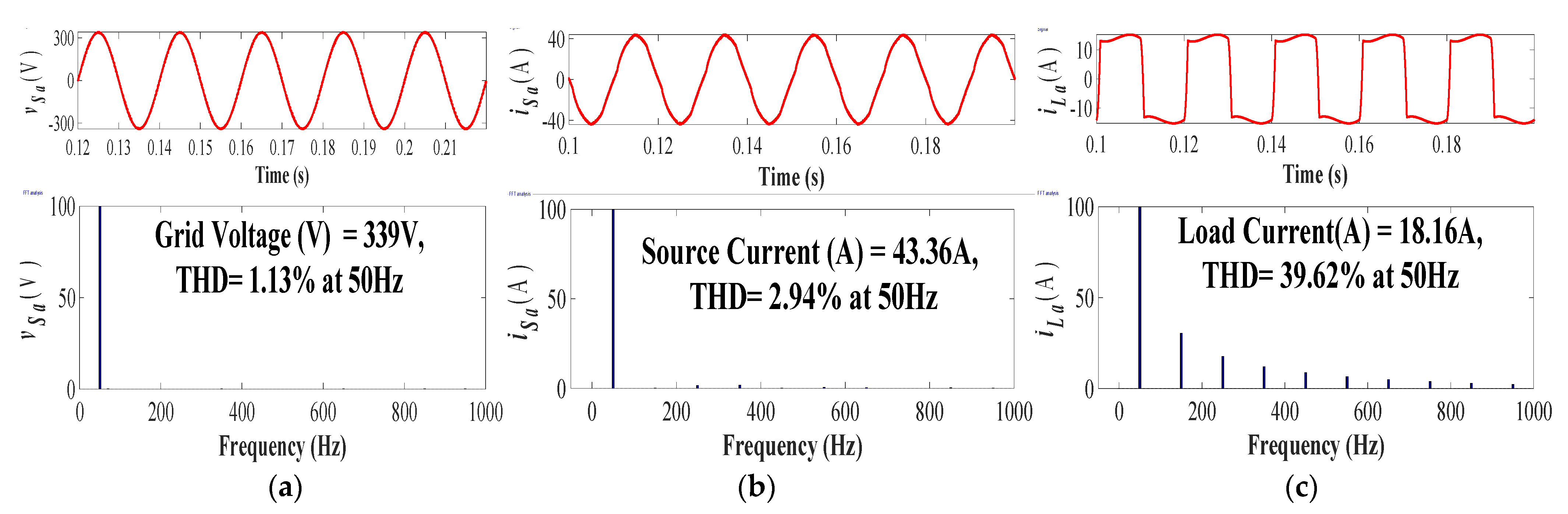
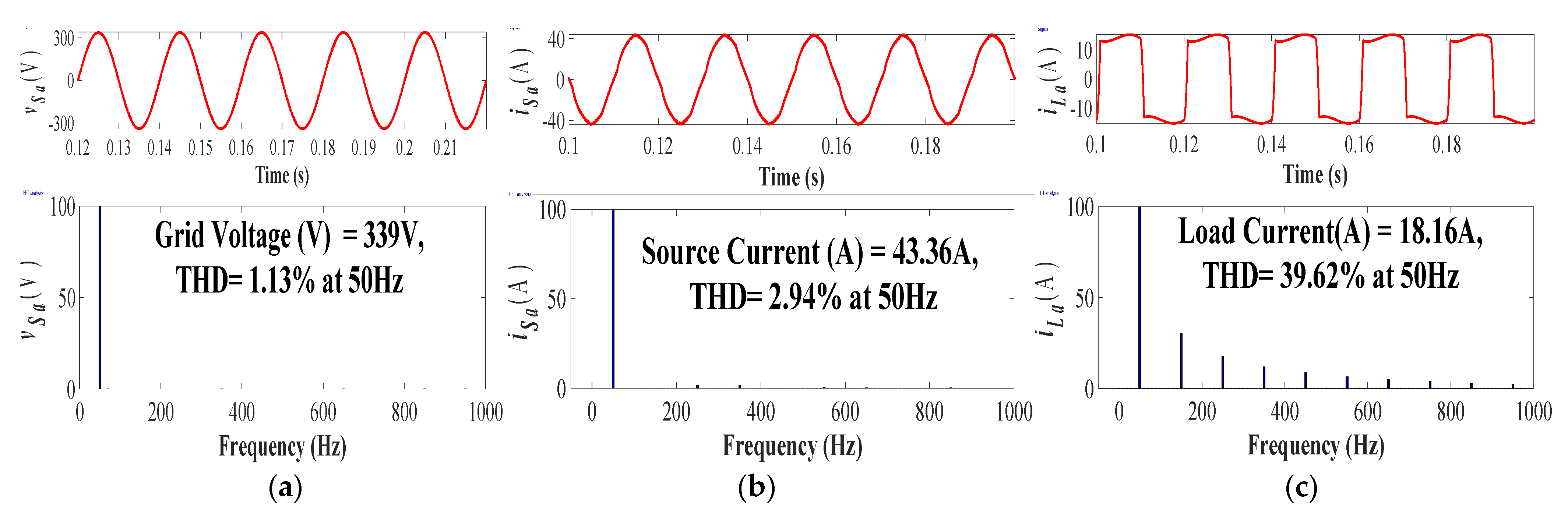
5.1. Steady-State Analysis
5.2. Smart Grid-Tied PV System Performance Analysis
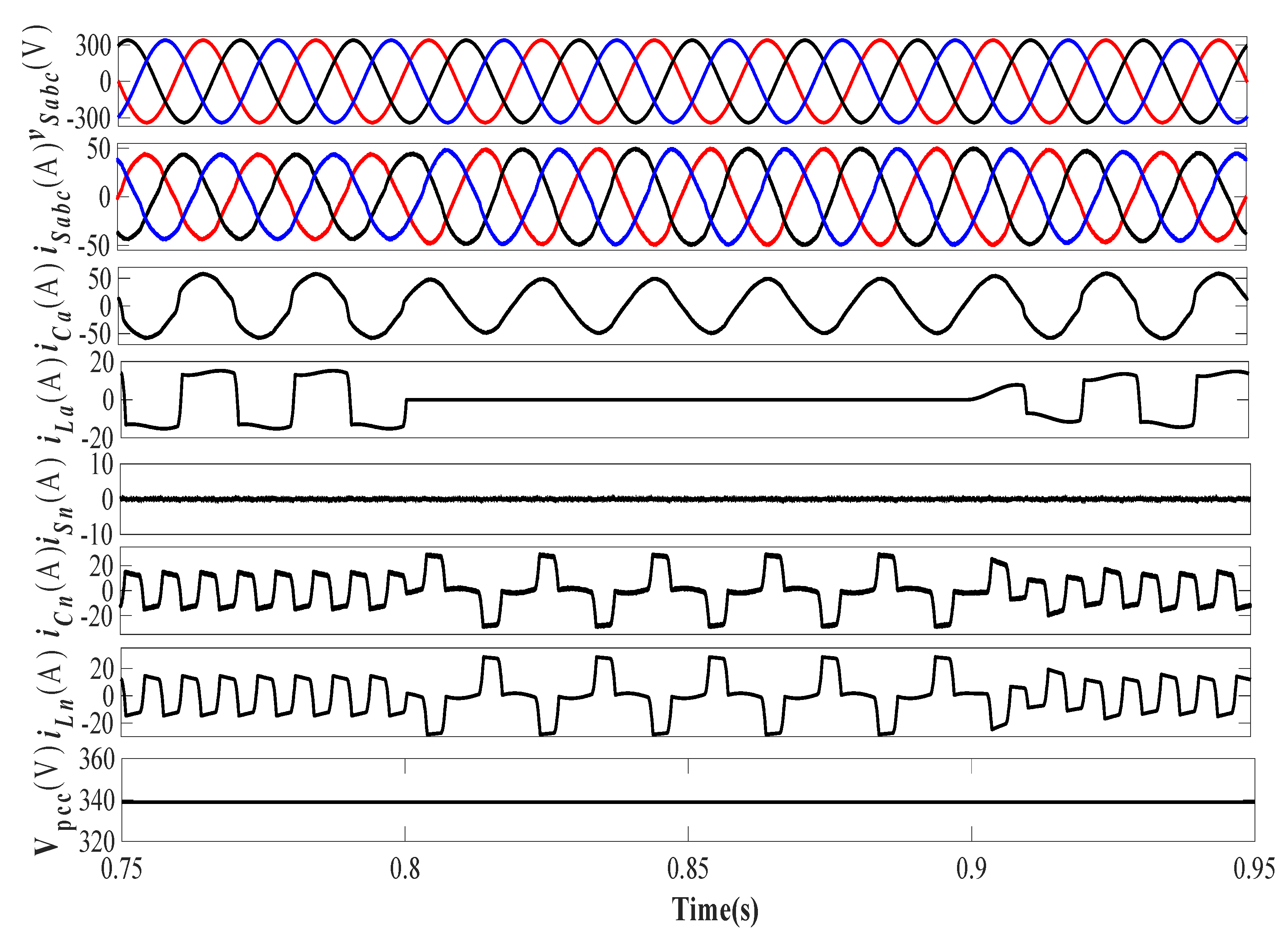
5.3. Load Unbalanced Analysis
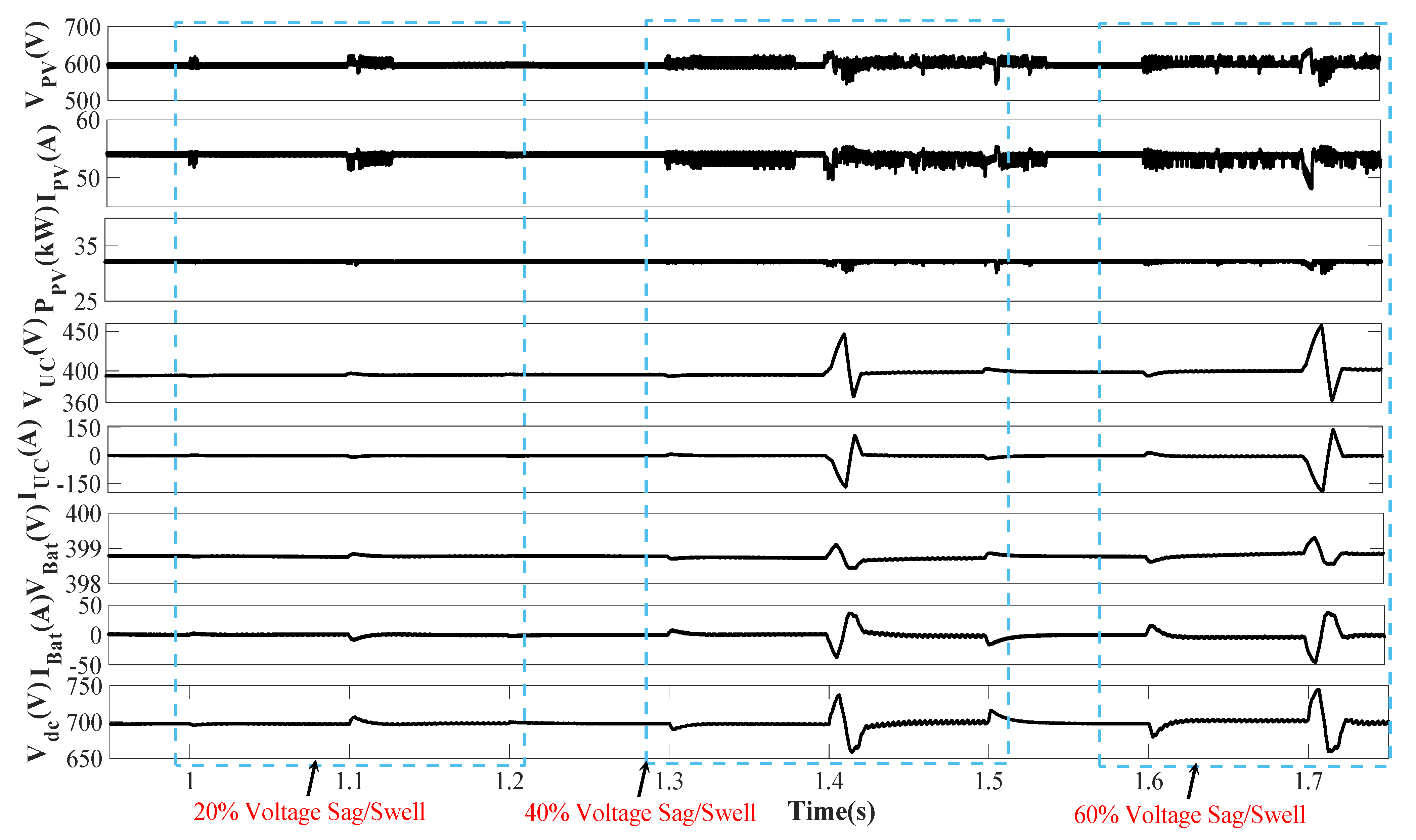
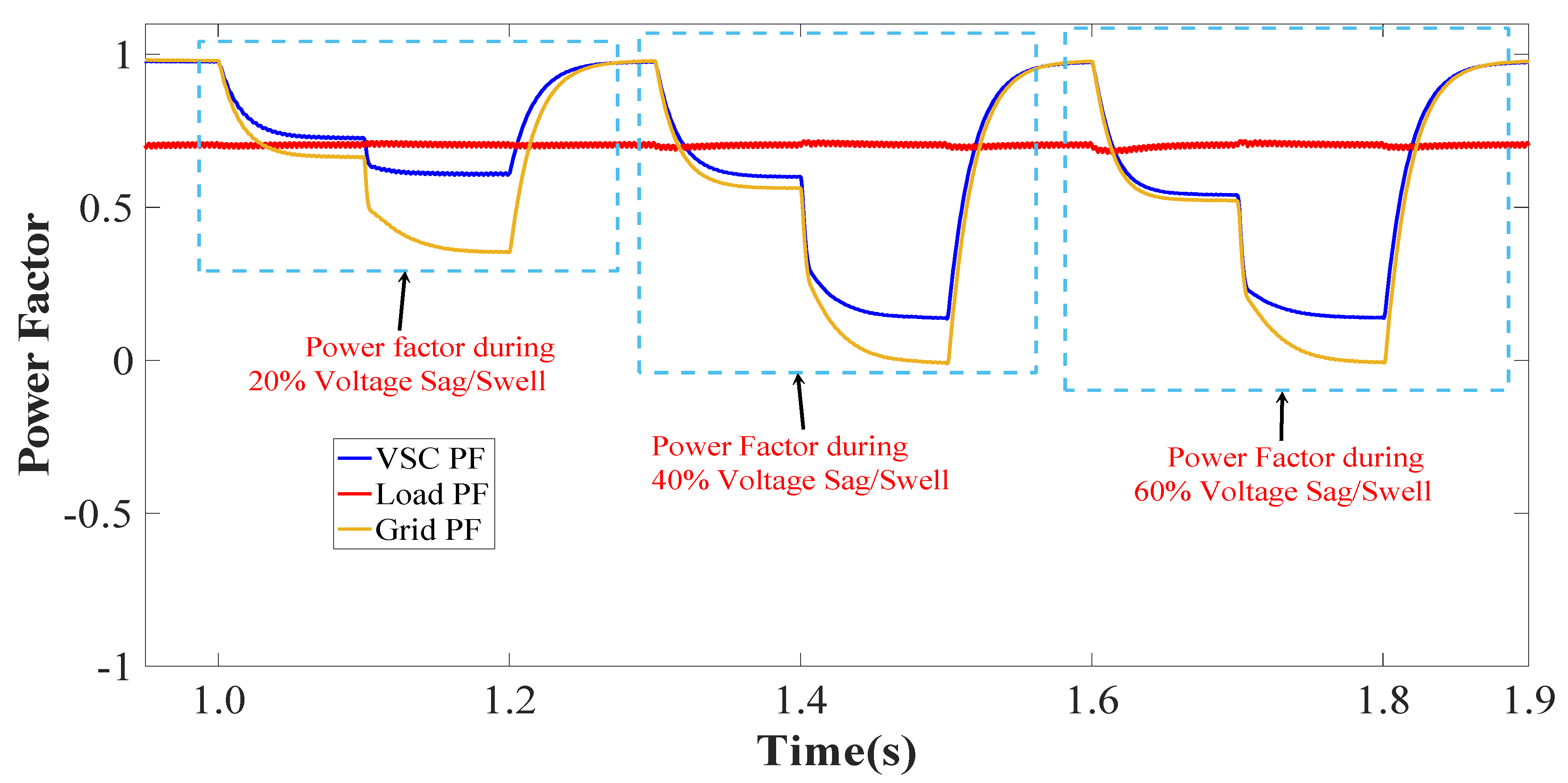
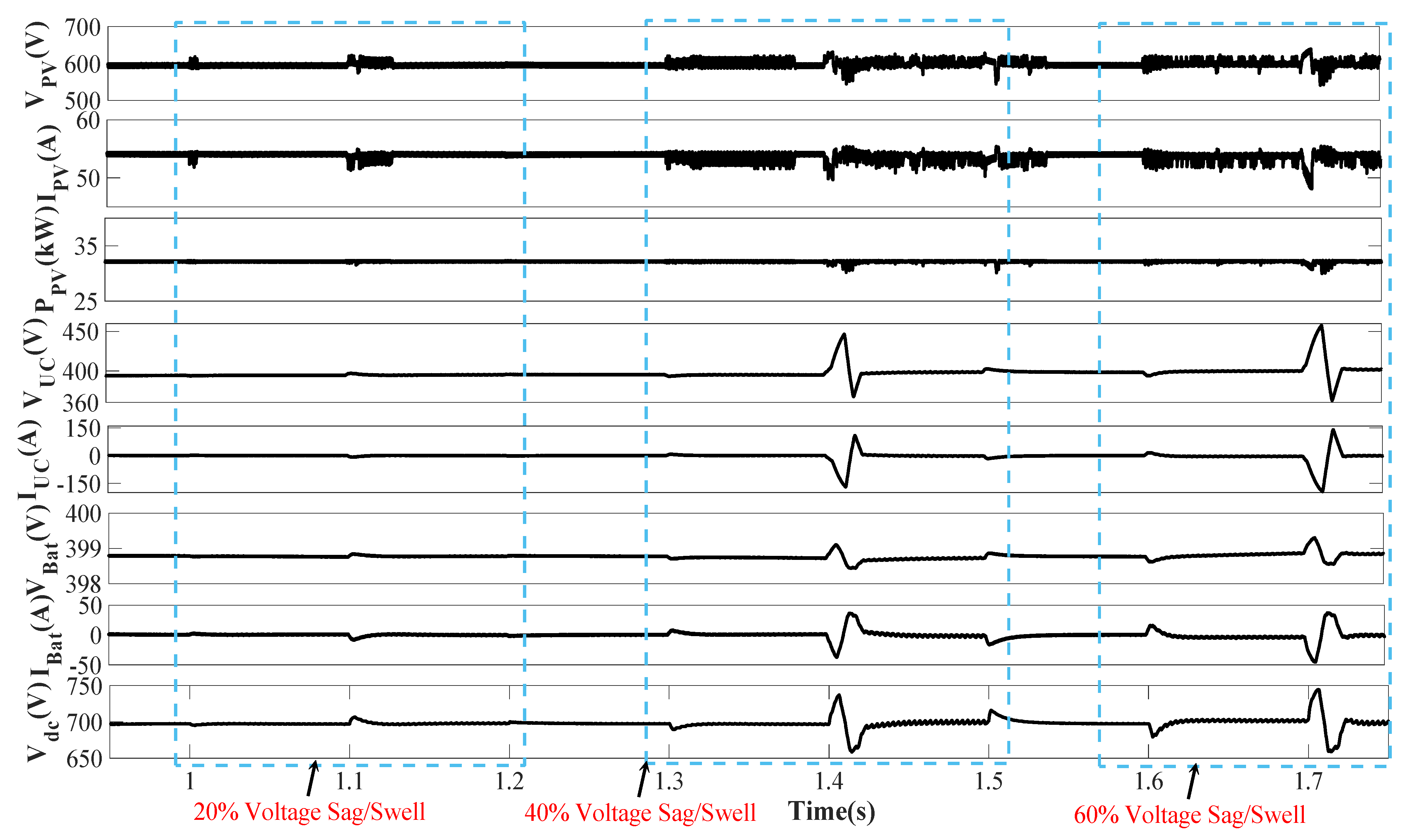
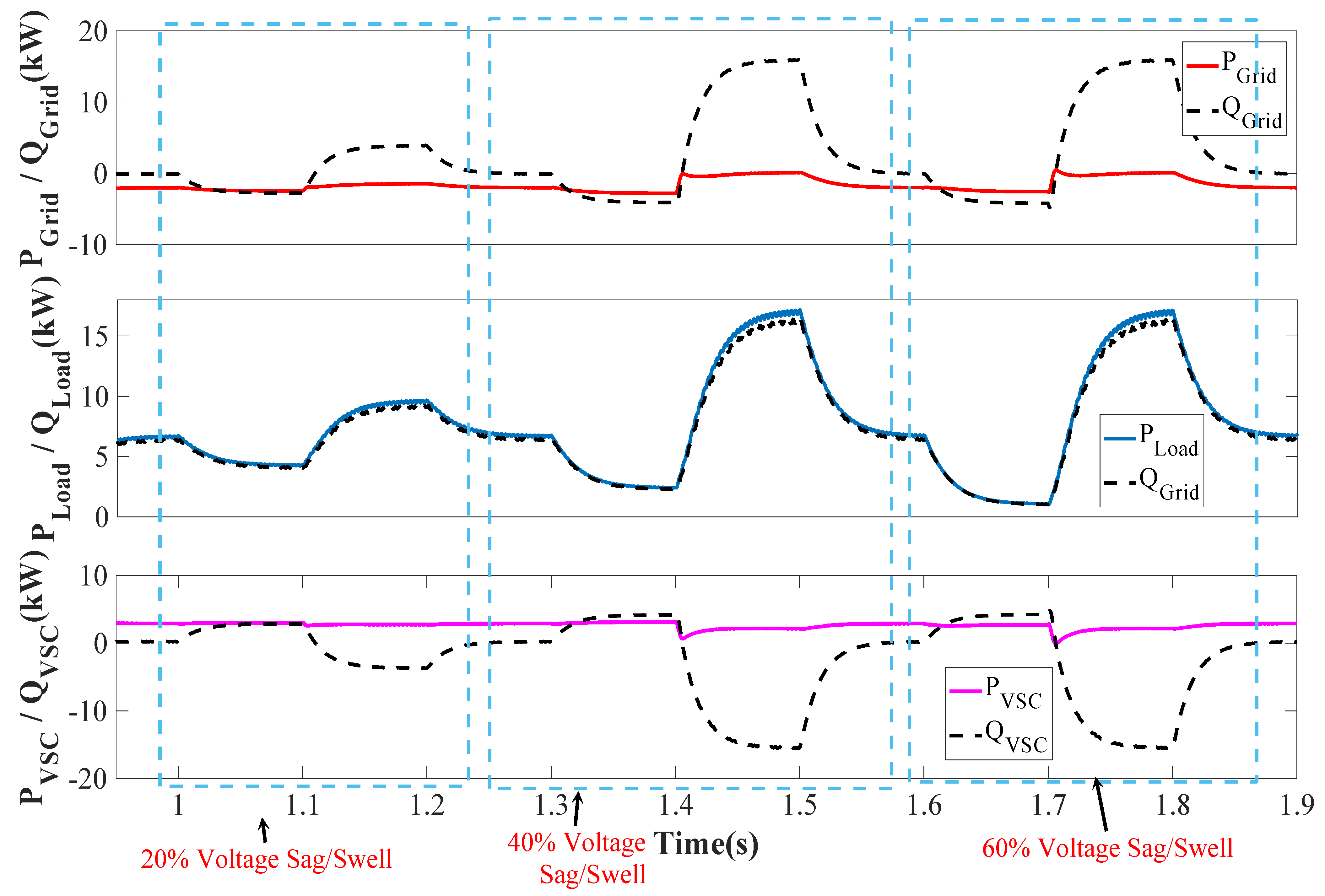
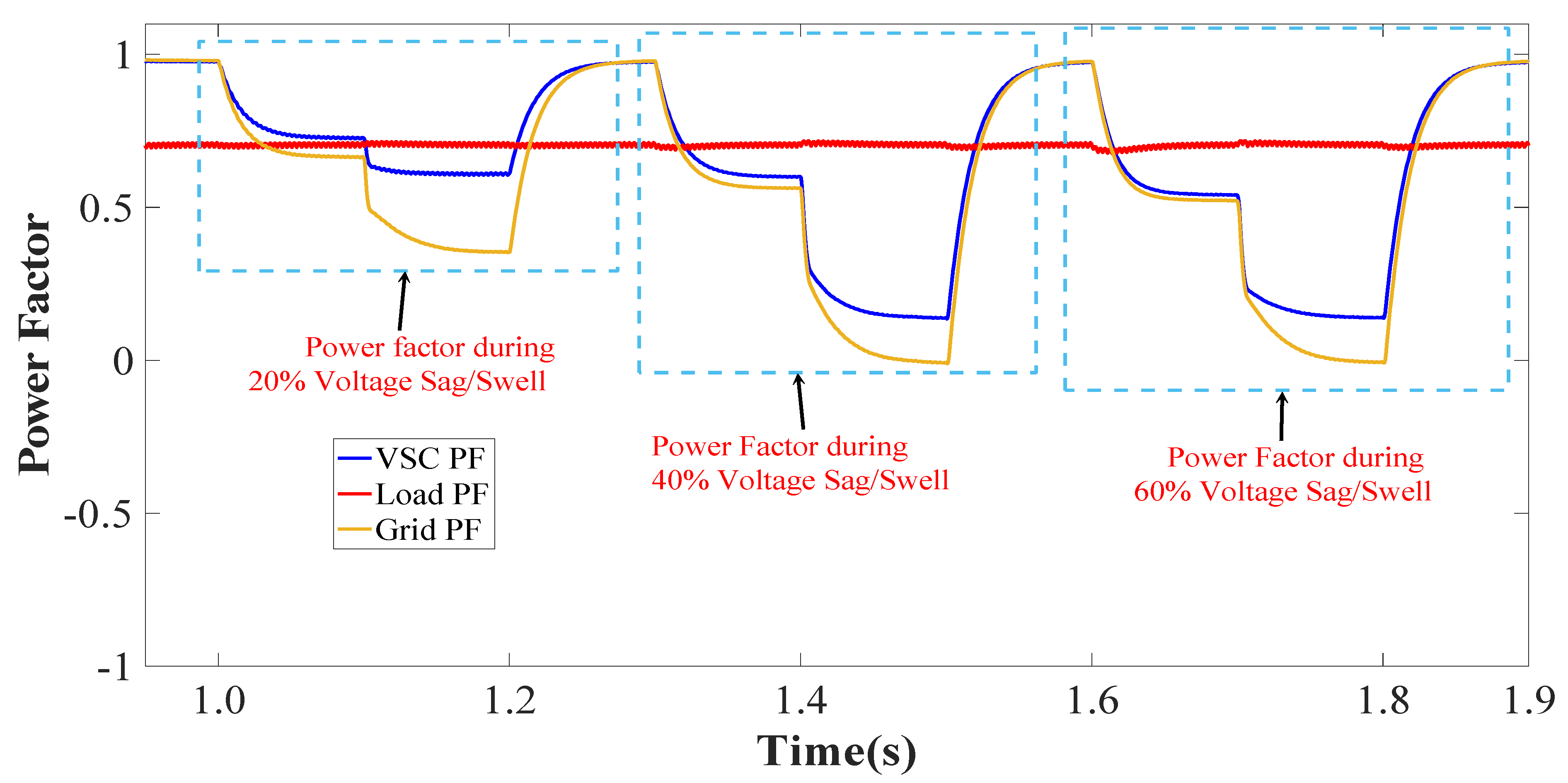
5.4. Abnormal Grid Voltage Analysis
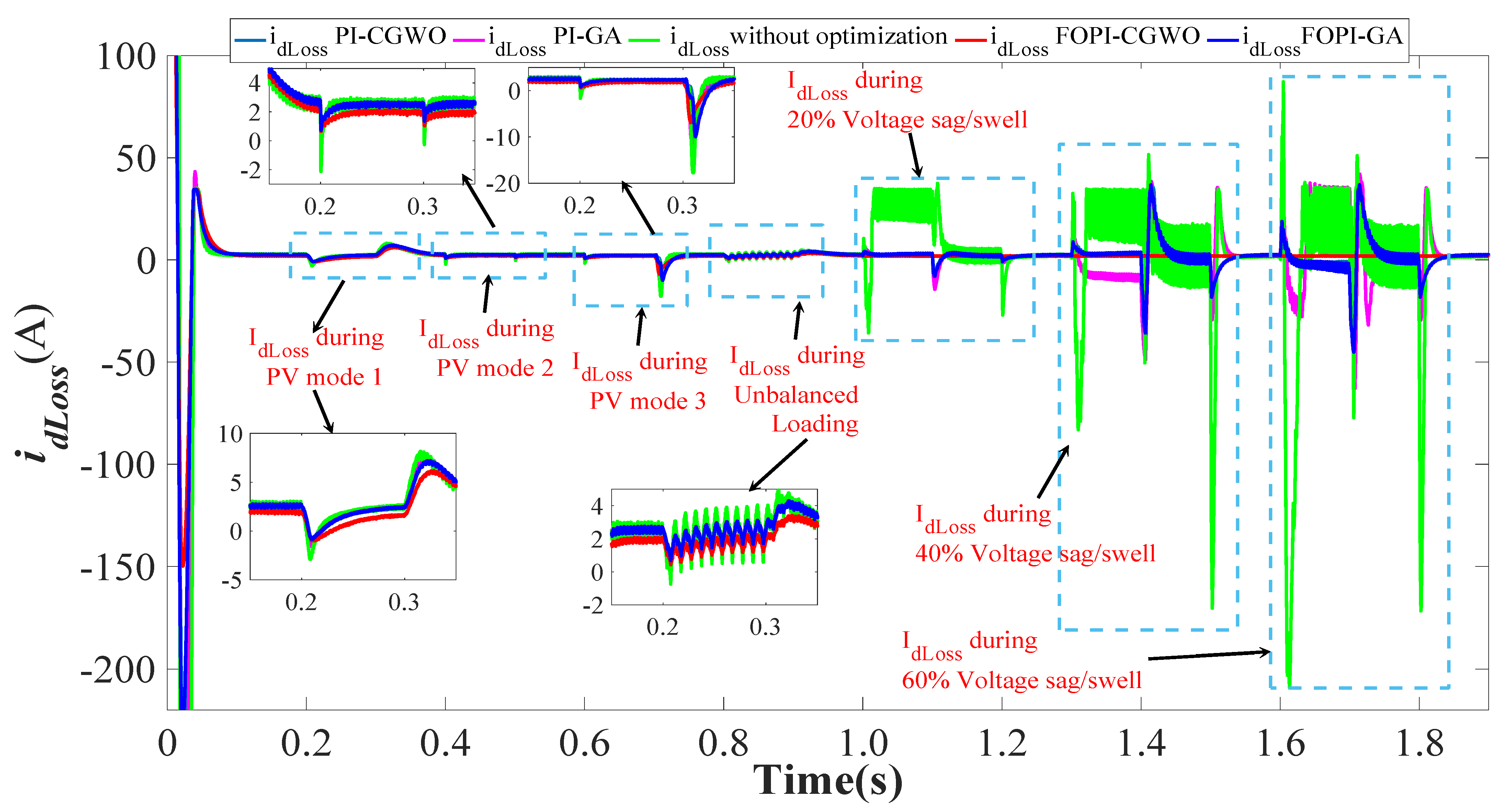
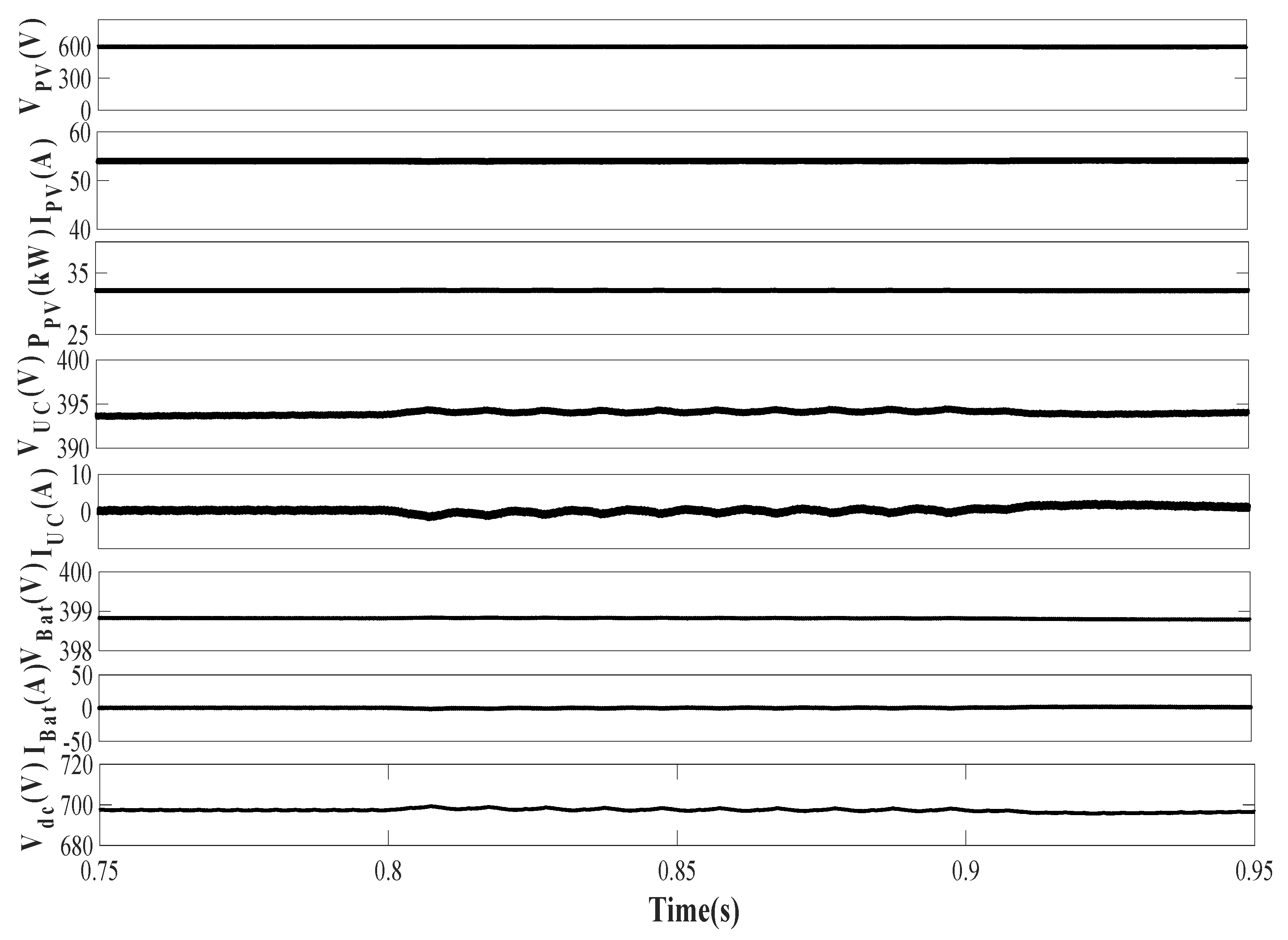
5.5. DC and AC Bus Stability Analysis
5.6. THD Performance Analysis during Dynamic Conditions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Das, B.K.; Alotaibi, M.A.; Das, P.; Islam, M.S.; Das, S.K.; Hossain, M.A. Feasibility and Techno-Economic Analysis of Stand-Alone and Grid-Connected PV/Wind/Diesel/Batt Hybrid Energy System: A Case Study. Energy Strategy Rev. 2021, 37, 100673. [Google Scholar] [CrossRef]
- Shah, F.A.; Khan, I.A.; Khan, H.A. Performance Evaluation of Two Similar 100 MW Solar PV Plants Located in Environmentally Homogeneous Conditions. IEEE Access 2019, 7, 161697–161707. [Google Scholar] [CrossRef]
- Rehman, S.; Ahmed, M.A.; Mohamed, M.H.; Al-Sulaiman, F.A. Feasibility Study of the Grid Connected 10MW Installed Capacity PV Power Plants in Saudi Arabia. Renew. Sustain. Energy Rev. 2017, 80, 319–329. [Google Scholar] [CrossRef]
- IRENA. Renewable Power Generation Costs in 2020; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2021; ISBN 978-92-9260-348-9. [Google Scholar]
- Gandhi, O.; Kumar, D.S.; Rodríguez-Gallegos, C.D.; Srinivasan, D. Review of Power System Impacts at High PV Penetration Part I: Factors Limiting PV Penetration. Sol. Energy 2020, 210, 1–21. [Google Scholar] [CrossRef]
- Kumar, D.S.; Gandhi, O.; Rodríguez-Gallegos, C.D.; Srinivasan, D. Review of Power System Impacts at High PV Penetration Part II: Potential Solutions and the Way Forward. Sol. Energy 2020, 210, 202–221. [Google Scholar] [CrossRef]
- Karami, N.; Moubayed, N.; Outbib, R. General Review and Classification of Different MPPT Techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Villegas-Mier, C.G.; Rodriguez-Resendiz, J.; Álvarez-Alvarado, J.M.; Rodriguez-Resendiz, H.; Herrera-Navarro, A.M.; Rodríguez-Abreo, O. Artificial Neural Networks in Mppt Algorithms for Optimization of Photovoltaic Power Systems: A Review. Micromachines 2021, 12, 1260. [Google Scholar] [CrossRef]
- Estévez-Bén, A.A.; Alvarez-Diazcomas, A.; Rodríguez-Reséndiz, J. Transformerless Multilevel Voltage-Source Inverter Topology Comparative Study for PV Systems. Energies 2020, 13, 3261. [Google Scholar] [CrossRef]
- López, H.; Rodríguez-Reséndiz, J.; Guo, X.; Vázquez, N.; Carrillo-Serrano, R.V. Transformerless Common-Mode Current-Source Inverter Grid-Connected for PV Applications. IEEE Access 2018, 6, 62944–62953. [Google Scholar] [CrossRef]
- Singh, B.; Chandra, A.; Al-haddad, K. Power Quality Problems and Mitigation Techniques, 1st ed.; John Wiley Online Library: West Sussex, UK, 2015; ISBN 9781118922057. [Google Scholar]
- Sevilla-Camacho, P.Y.; Zuniga-Reyes, M.A.; Robles-Ocampo, J.B.; Castillo-Palomera, R.; Muniz, J.; Rodriguez-Resendiz, J. A Novel Fault Detection and Location Method for PV Arrays Based on Frequency Analysis. IEEE Access 2019, 7, 72050–72061. [Google Scholar] [CrossRef]
- Mishra, S.; Ray, P.K. Power Quality Improvement Using Photovoltaic Fed DSTATCOM Based on JAYA Optimization. IEEE Trans. Sustain. Energy 2016, 7, 1672–1680. [Google Scholar] [CrossRef]
- Chankaya, M.; Hussain, I.; Ahmad, A.; Malik, H.; García Márquez, F.P.; Márquez, F.P.G. Generalized Normal Distribution Algorithm-Based Control of 3-Phase 4-Wire Grid-Tied PV-Hybrid Energy Storage System. Energies 2021, 14, 4355. [Google Scholar] [CrossRef]
- Mosalam, H.A.; Amer, R.A.; Morsy, G.A. Fuzzy Logic Control for a Grid-Connected PV Array through Z-Source-Inverter Using Maximum Constant Boost Control Method. Ain Shams Eng. J. 2018, 9, 2931–2941. [Google Scholar] [CrossRef]
- Agarwal, R.K.; Hussain, I.; Singh, B. Application of LMS-Based NN Structure for Power Quality Enhancement in a Distribution Network under Abnormal Conditions. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1598–1607. [Google Scholar] [CrossRef] [PubMed]
- Agarwal, R.K.; Hussain, I.; Singh, B. LMF-Based Control Algorithm for Single Stage Three-Phase Grid Integrated Solar PV System. IEEE Trans. Sustain. Energy 2016, 7, 1379–1387. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhang, T.; Xue, J. Application of Fuzzy Control in a Photovoltaic Grid-Connected Inverter. J. Electr. Comput. Eng. 2018, 2018, 3806372. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharyya, S.; Singh, B.; Chandra, A.; Al-Haddad, K. Artificial Neural Network Based Advanced Current Control for Grid-Tied Photovoltaic System. In Proceedings of the 2019 National Power Electronics Conference, NPEC, Tiruchirappalli, India, 13–15 December 2019. [Google Scholar] [CrossRef]
- Chankaya, M.; Hussain, I.; Ahmad, A.; Khan, I.; Muyeen, S.M. Nyström Minimum Kernel Risk-Sensitive Loss Based Seamless Control of Grid-Tied PV-Hybrid Energy Storage System. Energies 2021, 14, 1365. [Google Scholar] [CrossRef]
- Alturki, F.A.; Omotoso, H.O.; Al-Shamma’a, A.A.; Farh, H.M.H.; Alsharabi, K. Novel Manta Rays Foraging Optimization Algorithm Based Optimal Control for Grid-Connected PV Energy System. IEEE Access 2020, 8, 187276–187290. [Google Scholar] [CrossRef]
- Tayebi, S.M.; Hu, H.; Batarseh, I. Advanced DC-Link Voltage Regulation and Capacitor Optimization for Three-Phase Microinverters. IEEE Trans. Ind. Electron. 2019, 66, 307–317. [Google Scholar] [CrossRef]
- Kohli, M.; Arora, S. Chaotic Grey Wolf Optimization Algorithm for Constrained Optimization Problems. J. Comput. Des. Eng. 2018, 5, 458–472. [Google Scholar] [CrossRef]
- Thangam, T.; Muthuvel, K. Hybrid Algorithm Based PFoPID Control Design of a Grid-Connected PV Inverter for MPPT. In Proceedings of the 2nd International Conference on Inventive Research in Computing Applications, ICIRCA, Coimbatore, India, 15–17 July 2020; pp. 992–998. [Google Scholar] [CrossRef]
- Lakshmi, M.; Hemamalini, S. Decoupled Control of Grid Connected Photovoltaic System Using Fractional Order Controller. Ain Shams Eng. J. 2018, 9, 927–937. [Google Scholar] [CrossRef] [Green Version]
- Nasir, A.; Rasool, I.; Sibtain, D.; Kamran, R. Adaptive Fractional Order PID Controller Based MPPT for PV Connected Grid System Under Changing Weather Conditions. J. Electr. Eng. Technol. 2021, 16, 2599–2610. [Google Scholar] [CrossRef]
- Rezkallah, M.; Chandra, A.; Singh, B.; Singh, S. Microgrid: Configurations, Control and Applications. IEEE Trans. Smart Grid 2019, 10, 1290–1302. [Google Scholar] [CrossRef]
- Singh, B.; Solanki, J. A Comparison of Control Algorithms for DSTATCOM. IEEE Trans. Ind. Electron. 2009, 56, 2738–2745. [Google Scholar] [CrossRef]
- Mus-Ab, A.; Mishra, M.K. Wavelet Transform Based Algorithms for Load Compensation Using DSTATCOM. In Proceedings of the 2017 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Bangalore, India, 8–10 November 2017. [Google Scholar]
- Kumar, R.; Singh, B.; Kumar, R.; Marwaha, S. Recognition of Underlying Causes of Power Quality Disturbances Using Stockwell Transform. IEEE Trans. Instrum. Meas. 2020, 69, 2798–2807. [Google Scholar] [CrossRef]
- Pradhan, S.; Hussain, I.; Singh, B.; Panigrahi, B.K. Modified VSS-LMS-Based Adaptive Control for Improving the Performance of a Single-Stage PV-Integrated Grid System. IET Sci. Meas. Technol. 2017, 11, 388–399. [Google Scholar] [CrossRef]
- Hussain, I.; Agarwal, R.K.; Singh, B. Delayed LMS Based Adaptive Control of PV-DSTATCOM System. In Proceedings of the 2020 3rd International Conference on Energy, Power and Environment: Towards Clean Energy Technologies, Shillong, India, 5–7 March 2021; pp. 1–6. [Google Scholar]
- Seema, S.S.; Singh, B.; Panigrahi, B.K. Median LMS Control Approach for SPV Grid Integrated Distribution System. In Proceedings of the 2021 International Conference on Sustainable Energy and Future Electric Transportation (SEFET), Hyderabad, India, 21–23 January 2021; pp. 1–5. [Google Scholar]
- Kumar, A.; Singh, B.; Jain, R. Double Stage Grid-Tied Solar PV System Using HC-LMS Control. In Proceedings of the PIICON 2020-9th IEEE Power India International Conference, Sonepat, India, 28 February–1 March 2020; pp. 3–8. [Google Scholar] [CrossRef]
- Srinivas, M.; Hussain, I.; Singh, B. Combined LMS-LMF-Based Control Algorithm of DSTATCOM for Power Quality Enhancement in Distribution System. IEEE Trans. Ind. Electron. 2016, 63, 4160–4169. [Google Scholar] [CrossRef]
- Saeed, M.O.B.; Pasha, S.A.; Zerguine, A. A Variable Step-Size Incremental LMS Solution for Low SNR Applications. Signal Processing 2021, 178, 107730. [Google Scholar] [CrossRef]
- Malik, H.; Iqbal, A.; Yadav, A.K. Soft computing in condition monitoring and diagnostics of electrical and mechanical systems. In Novel Methods for Condition Monitoring and Diagnostics; Springer: Berlin/Heidelberg, Germany, 2020; Volume 1096, p. 499. [Google Scholar] [CrossRef]
- Malik, H.; Iqbal, A.; Joshi, P.; Agrawal, S.; Bakhsh, F.I. (Eds.) Metaheuristic and Evolutionary Computation: Algorithms and Applications; Springer Nature: Singapore, 2021; Volume 916, p. 820. [Google Scholar] [CrossRef]
- Malik, H.; Fatema, N.; Alzubi, J.A. AI and Machine Learning Paradigms for Health Monitoring System: Intelligent Data Analytics; Springer Nature: Singapore, 2021; Volume 86, p. 513. [Google Scholar] [CrossRef]
- Iqbal, A.; Malik, H.; Riyaz, A.; Abdellah, K.; Bayhan, S. Renewable Power for Sustainable Growth; Springer Nature: Singapore, 2021; Volume 723, p. 805. [Google Scholar] [CrossRef]
- Tomar, A.; Malik, H.; Kumar, P.; Iqbal, A. Machine Learning, Advances in Computing, Renewable Energy and Communication; Springer Nature: Singapore, 2022; Volume 768, p. 659. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Optimization Technique | Objective | DG Used | Operational Mode | Operating Conditions |
|---|---|---|---|---|---|
| [13] | Jaya optimization | regulation, filter parameter estimation | Solar PV | Grid-Tied | Load unbalancing |
| [14] | GNDO | regulation | Solar PV-HESS | Grid-Tied | Weak grid weak |
| [15] | Fuzzy logic | regulation | Solar PV | Grid-Tied | grid |
| [18] | Fuzzy parameter optimization | regulation | Solar PV | Grid-Tied | PF correction |
| [20] | SSO | regulation | Solar PV-HESS | Grid-Tied | Weak grid |
| [21] | MRFO, GWO, WO, GHO, ASO | , MPPT regulation | Solar PV | Grid-Tied | Insolation change |
| [22] | Taylor approximation | regulation | Solar PV | Grid-Tied | Unstable control |
| Quantity | FOPI-CGWO | FOPI-GA | PI-CGWO | PI-GA | Without Optimization |
|---|---|---|---|---|---|
| 1.13% | 1.42% | 1.33% | 1.6% | 1.62% | |
| 2.94% | 2.96% | 3.12% | 3.38% | 3.56% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% |
| Quantity | VSS_ILMS | LMF | LMS |
|---|---|---|---|
| vSa | 1.13% | 1.6% | 1.62% |
| iSa | 2.94% | 4.38% | 4.71% |
| iLa | 39.61% | 39.61% | 39.61% |
| Parameters | CGWO-FOPI | GA-FOPI | CGWO-PI | GA-PI | Without Optimization |
|---|---|---|---|---|---|
| Steady-state error | 0.57% | 1.26% | 1% | 1.14% | 1.71% |
| Convergence speed | 5 ms | 7 ms | 7.8 ms | 11 ms | 16 ms |
| Dynamic state transients (PV to grid mode) | 1.12% | 1.87% | 2.12% | 2.18% | 2.42% |
| Dynamic state transients (Irradiation change) | 0.10% | 0.17% | 0.14% | 1.12% | 1.12% |
| Dynamic state transients (PV-DSTATCOM-STATCOM) | 0.13% | 1.14% | 1.29% | 1.71% | 2% |
| Dynamic state transients (Unbalanced load) | 0.29% | 0.43% | 0.57% | 0.85% | 0.13% |
| Dynamic state transients (Voltage sag/swell 20%) | 1.71% | 2% | 2.57% | 3.14% | 3.57% |
| Dynamic state transients (Voltage sag/swell 40%) | 4.98% | 5.42% | 8.29% | 8.56% | 10.20% |
| Dynamic state transients (Voltage sag/swell 60%) | 6.68% | 6.56% | 7.62% | 9.52% | 11.45% |
| Quantity | FOPI-CGWO | FOPI-GA | PI-CGWO | PI-GA | Without Optimization |
|---|---|---|---|---|---|
| Mode 1: PV to Grid mode | |||||
| 1.35% | 1.44% | 1.49% | 1.66% | 1.66% | |
| 1.94% | 2.20% | 2.12% | 2.38% | 2.53% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
| Mode 2: PV and Grid mode during Irradiation Change from 1000 W/m2 to 600 W/m2 | |||||
| 0.97% | 1.22% | 1.35% | 1.62% | 1.65% | |
| 6.23% | 6.51% | 6.70% | 6.99% | 7.22% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
| Mode 3: PV-DSTATCOM to DSTATCOM and vice versa mode | |||||
| 0.97% | 1.22% | 1.35% | 1.62% | 1.62% | |
| 6.23% | 6.22% | 6.25% | 6.37% | 7.29% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
| Load Unbalancing | |||||
| 1.2% | 1.49% | 1.35% | 1.62% | 1.62% | |
| 4.01% | 5.32% | 4.80% | 4.91% | 5.10% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
| Voltage Sag of 0.8 p.u. | |||||
| 1.61% | 1.62% | 1.61% | 1.62% | 1.62% | |
| 0.83% | 0.92% | 1.12% | 1.72% | 2.12% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
| Voltage Swell 1.2 p.u. | |||||
| 1.61% | 1.61% | 1.61% | 1.62% | 1.62% | |
| 1.28% | 2.16% | 2.76% | 3.15% | 4.29% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
| Voltage Sag of 0.6 p.u. | |||||
| 1.61% | 1.62% | 1.61% | 1.62% | 1.62% | |
| 0.56% | 0.77% | 1.78% | 3.36% | 4.17% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
| Voltage Swell 1.4 p.u. | |||||
| 1.61% | 1.61% | 1.61% | 1.62% | 1.62% | |
| 0.84% | 1.46% | 1.96% | 2.39% | 3.69% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
| Voltage Sag of 0.4 p.u. | |||||
| 1.61% | 1.62% | 1.61% | 1.62% | 1.62% | |
| 1.74% | 2.77% | 2.65% | 5.86% | 4.95% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
| Voltage Swell 1.6 p.u. | |||||
| 1.61% | 1.61% | 1.61% | 1.62% | 1.62% | |
| 0.82% | 1.5% | 1.95% | 1.95% | 3.63% | |
| 39.62% | 39.62% | 39.62% | 39.62% | 39.62% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chankaya, M.; Hussain, I.; Ahmad, A.; Malik, H.; Alotaibi, M.A. Stability Analysis of Chaotic Grey-Wolf Optimized Grid-Tied PV-Hybrid Storage System during Dynamic Conditions. Electronics 2022, 11, 567. https://doi.org/10.3390/electronics11040567
Chankaya M, Hussain I, Ahmad A, Malik H, Alotaibi MA. Stability Analysis of Chaotic Grey-Wolf Optimized Grid-Tied PV-Hybrid Storage System during Dynamic Conditions. Electronics. 2022; 11(4):567. https://doi.org/10.3390/electronics11040567
Chicago/Turabian StyleChankaya, Mukul, Ikhlaq Hussain, Aijaz Ahmad, Hasmat Malik, and Majed A. Alotaibi. 2022. "Stability Analysis of Chaotic Grey-Wolf Optimized Grid-Tied PV-Hybrid Storage System during Dynamic Conditions" Electronics 11, no. 4: 567. https://doi.org/10.3390/electronics11040567