
Classification and Identification Method of Radio Fuze Target and Sweep Jamming Signals Based on Third-Order Spectrum Features


Abstract
:1. Introduction
1.1. Research Background
1.2. Related Works
2. Higher-Order Statistics Theory
2.1. Higher-Order Moments and Higher-Order Cumulants
2.2. Higher-Order Moment Spectrum and Higher-Order Cumulant Spectrum
3. Signal Data Collection
3.1. Experimental Scenarios and Parameter Settings
3.2. Radio Fuze Output Signal Capture
4. Signal Third-Order Spectral Feature Extraction
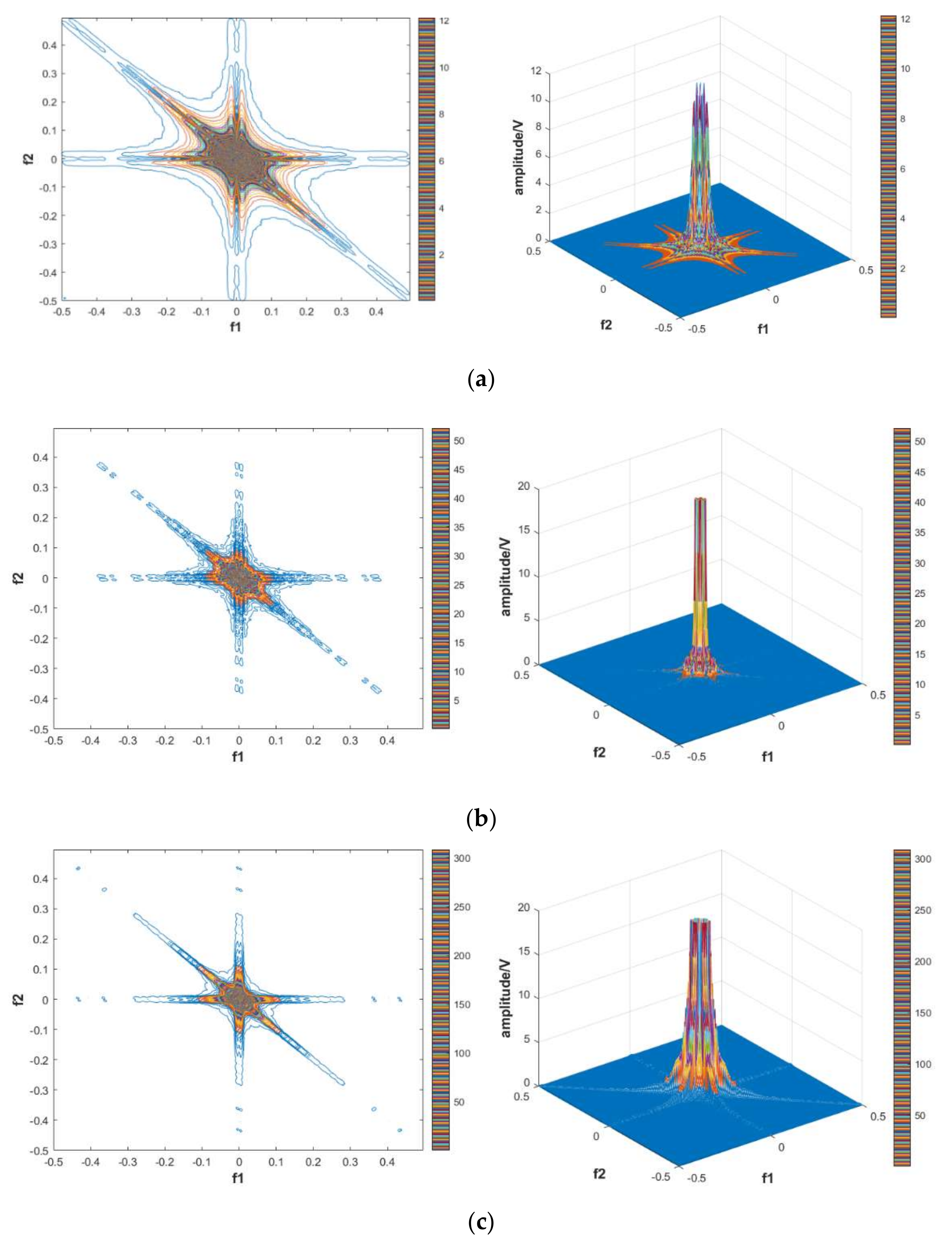
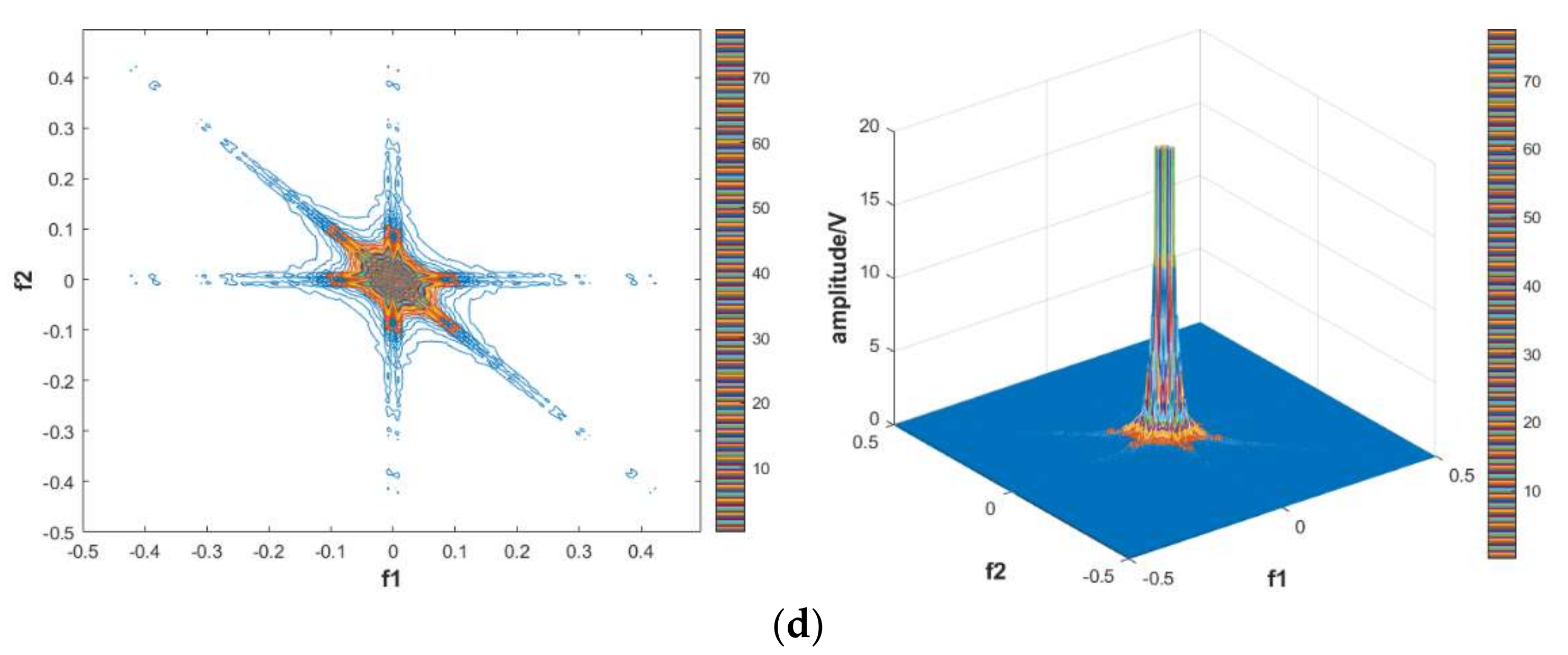
4.1. Third-Order Spectral Transformation of Signals
4.2. Feature Extraction Based on Third-Order Spectrum
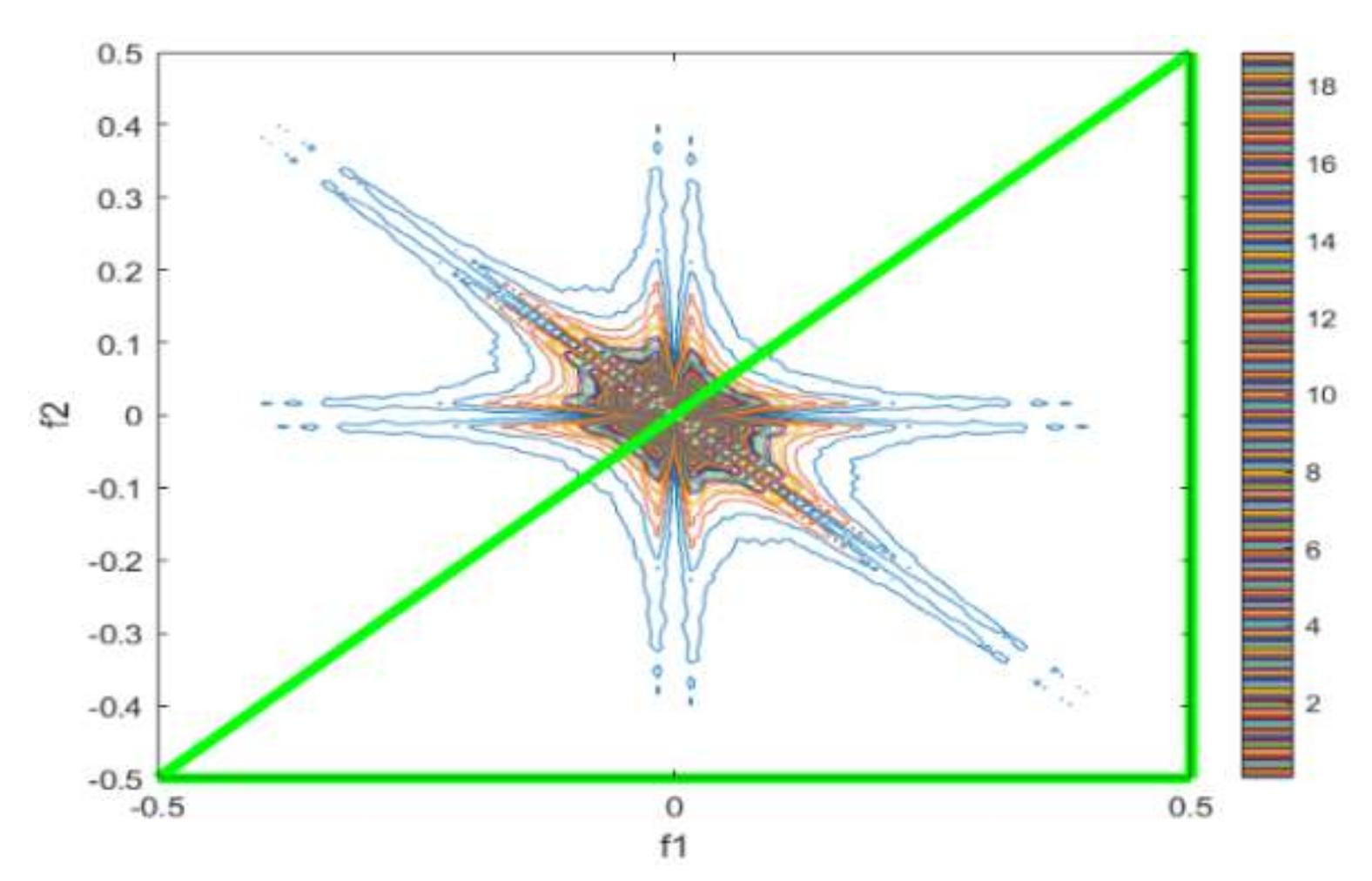
4.2.1. Feature Extraction Area Selection
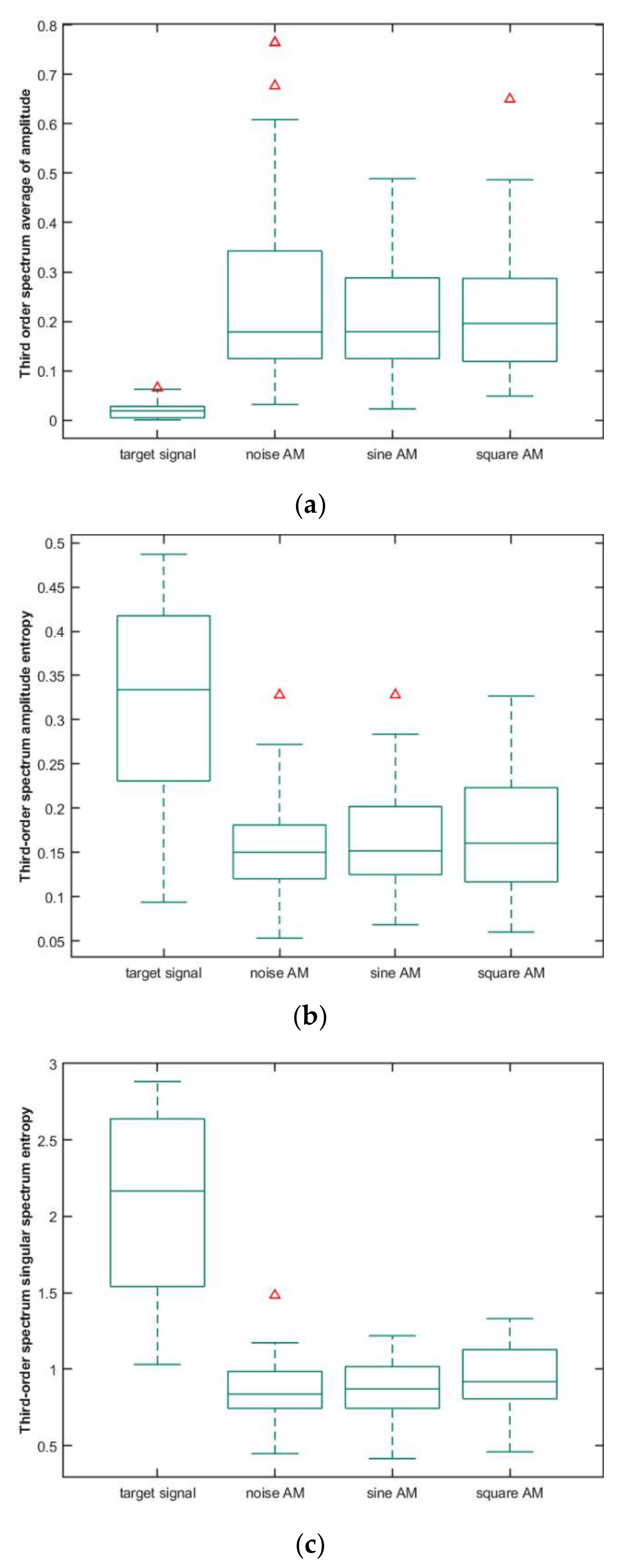
4.2.2. Third Order Spectral Amplitude Mean Characteristics
4.2.3. Third-Order Spectral Amplitude Entropy Characteristics
4.2.4. Third-Order Spectral Singular Spectral Entropy
4.3. Analysis of the Significance of Differences in Characteristics
5. Signal Classification and Identification Experiments
5.1. Classification Recognition Accuracy Experiment
5.2. Performance Comparison
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fericean, S.; Dorneich, A.; Droxler, R.; Krater, D. Development of a microwave proximity sensor for industrial applications. IEEE Sens. J. 2009, 9, 870–876. [Google Scholar] [CrossRef]
- Chen, Q.L.; Hao, X.H.; Yan, X.P.; Li, P. A high-performance waveform and a new ranging method for the proximity detector. Def. Technol. 2020, 16, 1–12. [Google Scholar] [CrossRef]
- Choi, J.H.; Jung, M.S.; Yeom, K.W. A design and assessment of a direction finding proximity fuze sensor. IEEE Sens. J. 2013, 13, 3079–3089. [Google Scholar] [CrossRef]
- Choi, J.H.; Jang, J.H.; Roh, J.E. Design of an FMCW radar altimeter for wide-range and low measurement error. IEEE Trans. Instrum. Meas. 2015, 64, 3517–3525. [Google Scholar] [CrossRef]
- Kong, Z.J.; Yan, X.P.; Li, P.; Hao, X.H.; Wang, J.T. Jamming Mechanism of frequency sweep jamming to FM Doppler fuze. Acta Armamentarii. 2017, 38, 1716–1722. [Google Scholar]
- Yue, K.; Hao, X.H.; Li, P. An LFMCW detector with new structure and FRFT based differential distance estimation method. Springer Plus 2016, 5, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Esmaeili-Najafabadi, H.; Ataei, M.; Sabahi, M.F. Designing sequence with minimum PSL using Chebyshev distance and its application for chaotic MIMO radar waveform design. IEEE Trans. Signal Processing 2017, 65, 690–704. [Google Scholar] [CrossRef]
- Choi, J.H.; Lee, J.M.; Jung, M.S.; An, J.Y.; Kim, K.L. FMCW transceiver of short-range proximity sensor in sea clutter. Microw. Opt. Technol. Lett. 2017, 59, 334–337. [Google Scholar] [CrossRef]
- Hanbali, S.B.S.; Kastantin, R. Technique to counter active echo cancellation of self-protection ISRJ. IET Radar Sonar Nav. 2017, 53, 680–681. [Google Scholar]
- Chen, Q.L.; Hao, X.H.; Yan, X.P.; Wang, X.W. Anti-DRFM jamming method using dual-channel harmonic correlation detection for variable chirp rate FM fuze. Acta Armamentarii. 2019, 40, 449–455. [Google Scholar]
- Chen, Q.L.; Hao, X.H.; Kong, Z.J.; Yan, X.P. Anti-Sweep-Jamming method based on the averaging of range side lobes for hybrid modulation proximity detectors. IEEE Access 2020, 8, 33479–33488. [Google Scholar] [CrossRef]
- Dai, J.; Hao, X.H.; Yan, X.P.; Li, Z. Adaptive false-target recognition for the proximity sensor based on joint-feature extraction and chaotic encryption. IEEE Sens. J. 2022, 22, 10828–10840. [Google Scholar] [CrossRef]
- Li, X.X.; Xiao, Z.L.; Zhu, Y.Y.; Zhang, S.N.; Chen, S. Carrier-Free UWB sensor Small-Sample Terrian recognition based on improved ACGAN with Self-Attention. IEEE Sens. J. 2020, 22, 8050–8058. [Google Scholar] [CrossRef]
- Zhu, Y.Y.; Zhang, S.N.; Zhu, L.Z.; Sun, Y.Y.; Chen, S. Hierarchical dictionary learning for vehicle classification based on the carrier-free UWB radar. IEEE Trans. Geosci. Electron. 2020, 60, 1–12. [Google Scholar] [CrossRef]
- Huang, Y.; Hao, X.H.; Kong, Z.J.; Zhang, B. Recognition of Target and jamming signal for FM fuze based on entropy features. Acta Armamentarii. 2017, 38, 254–260. [Google Scholar]
- Zhong, Y.; Yang, Y.; Zhu, X.; Dutkiewicz, E.; Zhou, Z.; Jiang, T. Device-Free sensing for personnel detection in a foliage environment. IEEE Geosci. Remote. Sens. Lett. 2017, 14, 1–5. [Google Scholar] [CrossRef]
- Zhong, Y.; Bi, T.Q.; Wang, J.; Wu, S.L.; Jiang, T.; Huang, Y. Low data regimes in extreme climates: Foliage penetration personnel detection using a wireless network-based device-free sensing approach. Ad Hoc Netw. 2021, 114, 102438–102448. [Google Scholar] [CrossRef]
- Mookiah, M.R.K.; Acharya, U.R.; Lim, C.M.; Petznick, A.; Suri, J.S. Data mining technique for automated diagnosis of glaucoma using higher order spectra and wavelet energy features. Knowl.-Based Syst. 2012, 33, 73–82. [Google Scholar] [CrossRef]
- Berraih, S.A.; Baakek, Y.N.E.; Debbal, S.M.E.A. Pathological discrimination of the phonocardiogram signal using the bispectral technique. Phys. Eng. Sci. Med. 2020, 43, 1371–1385. [Google Scholar] [CrossRef]
- Mahmoodian, N.; Boese, A.; Friebe, M.; Haddadnia, J. Epileptic seizure detection using cross-bispectrum of electroencephalogram signal. Seizure-Eur. J. Epilep. 2019, 66, 4–11. [Google Scholar] [CrossRef] [Green Version]
- Borges, F.; Pinto, A.; Ribeiro, D.; Barbosa, T.; Pereira, D.; Magalhaes, R.; Barbosa, B.; Ferreira, D. An Unsupervised method based on support vector machines and high-order statistic for mechical faults detection. IEEE Lat. Am. Trans. 2020, 18, 1093–1101. [Google Scholar] [CrossRef]
- Orlic, V.D.; Dukic, M.L. Automatic modelation classification algorithm using higher-order cumulants under real-world channel conditions. IEEE Commun. Lett. 2009, 13, 917–919. [Google Scholar] [CrossRef]
- Su, W. Feature space analysis of modulation classification using very high-order statistics. IEEE Commun. Lett. 2013, 17, 1688–1691. [Google Scholar] [CrossRef]
- Dong, Z.Y.; Lv, F.R.; Wan, T.; Jiang, K.L.; Fang, X.L.; Zhang, L. Radar signal modulation recognition based on bispectrum features and deep learning. In Proceedings of the 2021 International Conference on Computer Engineering and Application, Kunming, China, 25–27 June 2021. [Google Scholar]
- Garth, L.M.; Bresler, Y. A comparison of optimized higher order spectral detection techniques for non-Gaussian signals. IEEE Trans. Signal Processing 1996, 44, 1198–1213. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Type | p-Value |
|---|---|
| Third-order spectral amplitude mean feature | 1.0285 × 10−55 |
| Third-order spectral amplitude entropy feature | 6.4729 × 10−45 |
| Third-order spectral singular spectral entropy feature | 7.3621 × 10−85 |
| Evaluation Indicators | Distance Calculation | Number of Nearest Neighbours | Results | Probability of Being Jammed |
|---|---|---|---|---|
| Comprehensive recognition accuracy | Euclidean distance | 27 | 98.06% | 0.83% |
| Manhattan distance | 4 | 98.33% | 1.11% | |
| Chebyshev distance | 3 | 98.06% | 1.11% | |
| Target recognition accuracy | Euclidean distance | 6 | 98.64% | 1.39% |
| Manhattan distance | 3 | 99.0% | 1.39% | |
| Chebyshev distance | 6 | 98.64% | 1.39% | |
| Jamming recognition accuracy | Euclidean distance | 130 | 100% | 0 |
| Manhattan distance | 98 | 100% | 0 | |
| Chebyshev distance | 146 | 100% | 0 |
| Signal Feature Extraction Methods | Distance Calculation | Number of Nearest Neighbours | Comprehensive Recognition Accuracy | Target Recognition Accuracy | Jamming Recognition Accuracy |
|---|---|---|---|---|---|
| Our Method | Chebyshev distance | 3 | 98.06% | 98.11% | 95.43% |
| Reference [15] | Chebyshev distance | 3 | 92.01% | 94.12% | 91.14% |
| Reference [16] | Chebyshev distance | 3 | 94.17% | 93.58% | 94.87% |
| Distance Calculation | KNN Algorithm Search Method | K Value | ||
|---|---|---|---|---|
| 50 | 100 | 150 | ||
| Euclidean distance | KD tree-based | 1.3346 × 10−4 | 1.5592 × 10−4 | 2.3757 × 10−4 |
| exhaustive-based | 1.8121 × 10−4 | 2.0652 × 10−4 | 2.4106 × 10−4 | |
| Manhattan distance | KD tree-based | 1.1571 × 10−4 | 1.3203 × 10−4 | 1.7362 × 10−4 |
| exhaustive-based | 1.7081 × 10−4 | 1.8351 × 10−4 | 1.9569 × 10−4 | |
| Chebyshev distance | KD tree-based | 1.0857 × 10−4 | 1.2173 × 10−4 | 1.5153 × 10−4 |
| exhaustive-based | 1.5446 × 10−4 | 1.7651 × 10−4 | 1.8902 × 10−4 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Hao, X.; Qian, P.; Cai, X.; Zhou, W. Classification and Identification Method of Radio Fuze Target and Sweep Jamming Signals Based on Third-Order Spectrum Features. Electronics 2022, 11, 2474. https://doi.org/10.3390/electronics11152474
Liu B, Hao X, Qian P, Cai X, Zhou W. Classification and Identification Method of Radio Fuze Target and Sweep Jamming Signals Based on Third-Order Spectrum Features. Electronics. 2022; 11(15):2474. https://doi.org/10.3390/electronics11152474
Chicago/Turabian StyleLiu, Bing, Xinhong Hao, Pengfei Qian, Xin Cai, and Wen Zhou. 2022. "Classification and Identification Method of Radio Fuze Target and Sweep Jamming Signals Based on Third-Order Spectrum Features" Electronics 11, no. 15: 2474. https://doi.org/10.3390/electronics11152474