
Research on fNIRS Recognition Method of Upper Limb Movement Intention


 ,
,
Abstract
1. Introduction
2. Experimental Design
2.1. Participants
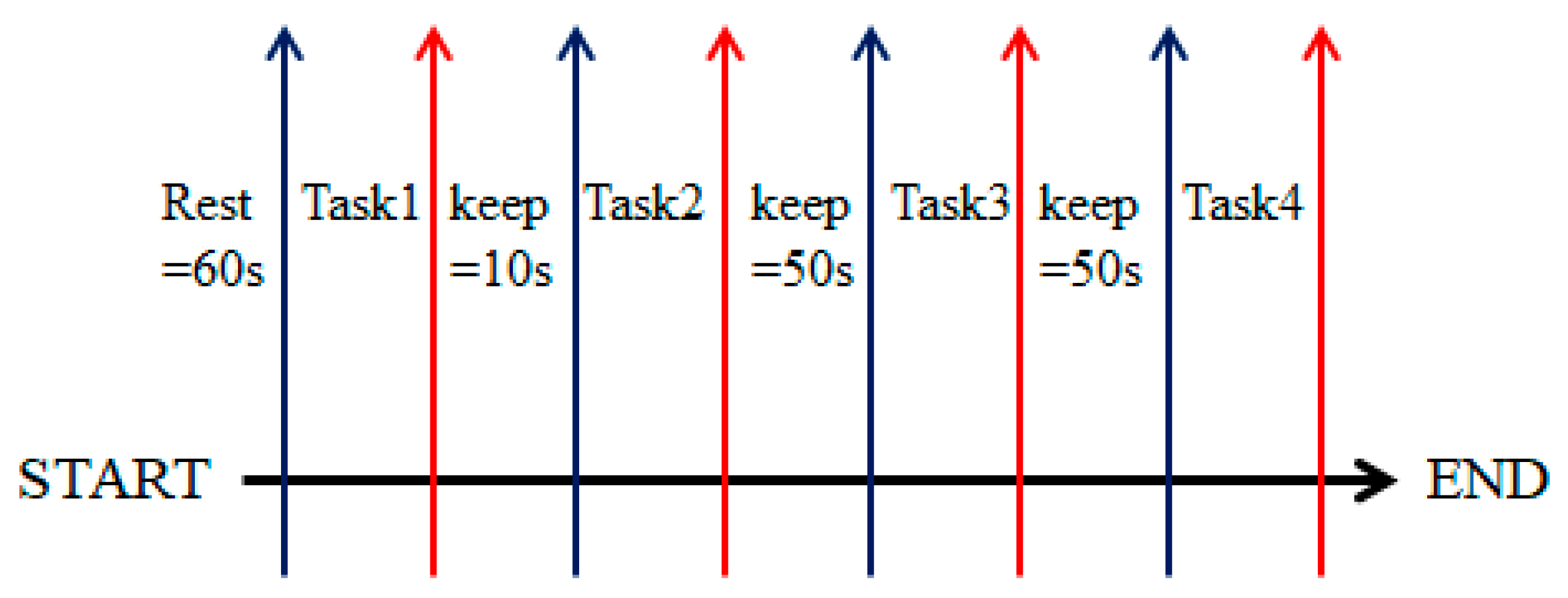
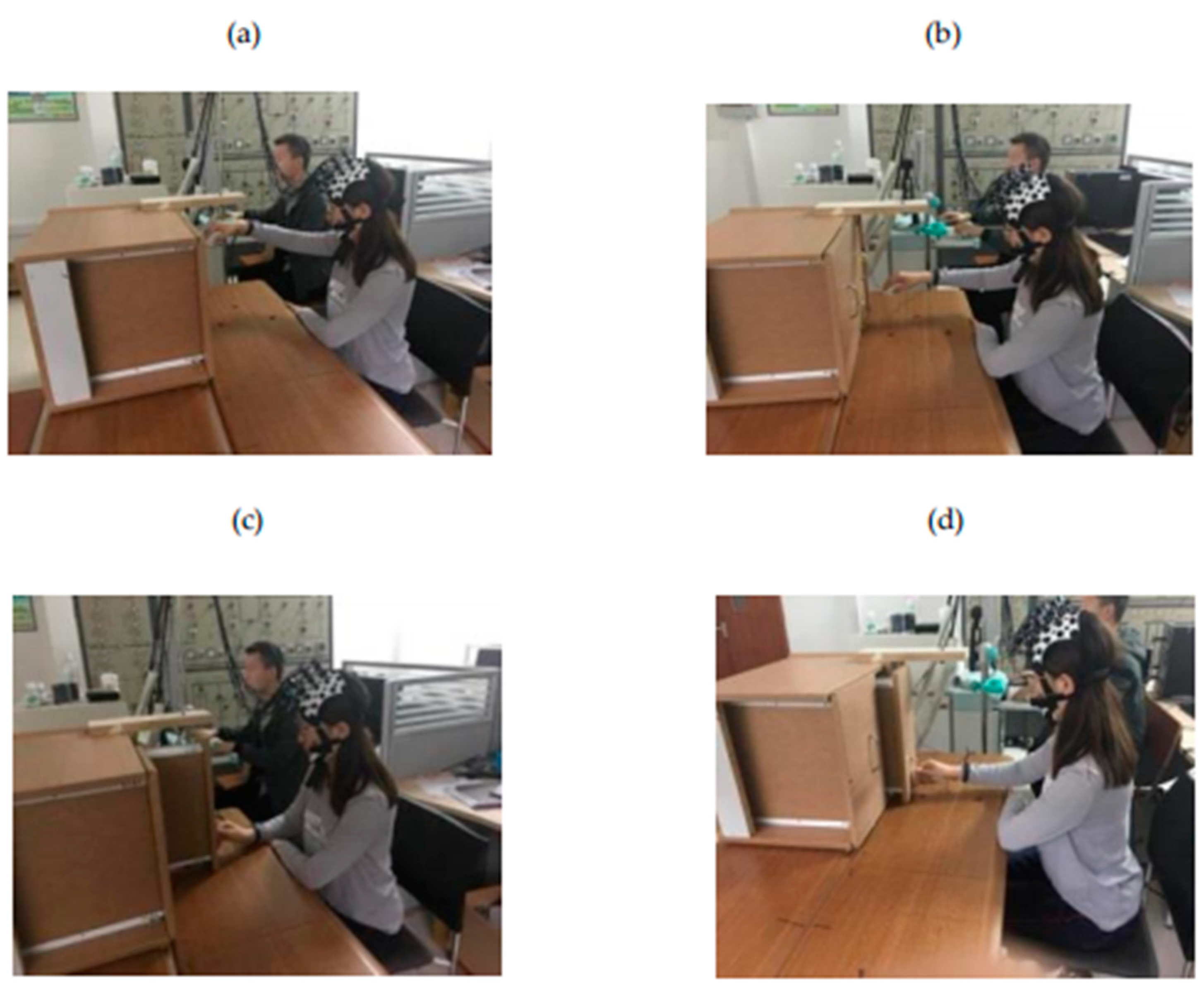
2.2. Experiment Paradigm
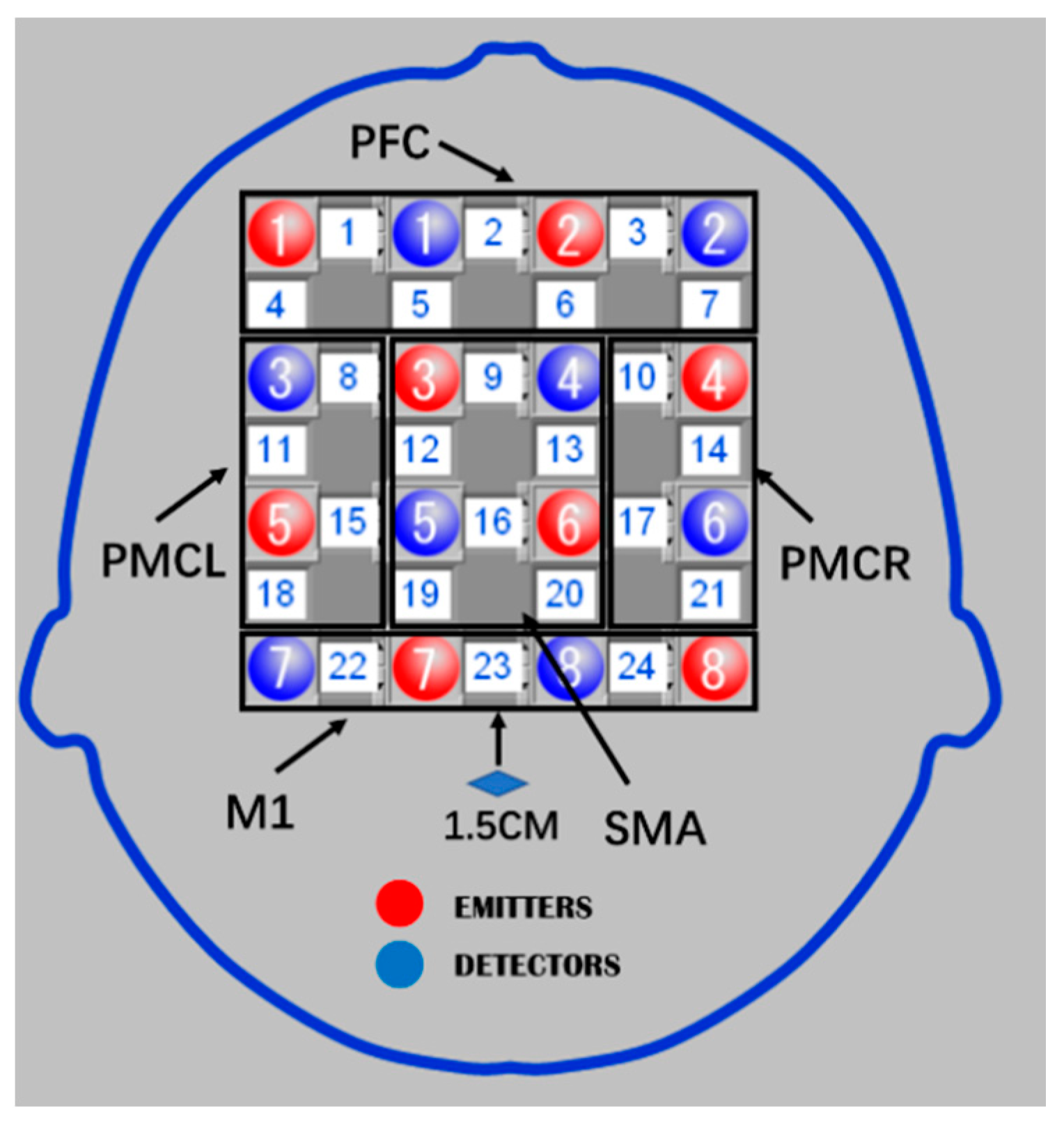
2.3. Cortical Regions
3. Data Analysis
3.1. Data Preprocessing
3.2. Data Preprocessing
3.2.1. Action Initiation Intent Feature Extraction
3.2.2. Motion State Feature Extraction
3.3. Feature Selection
3.3.1. Action Initiation Intention Feature Selection
3.3.2. Movement State Feature Selection
4. Results
4.1. Data Preprocessing Results
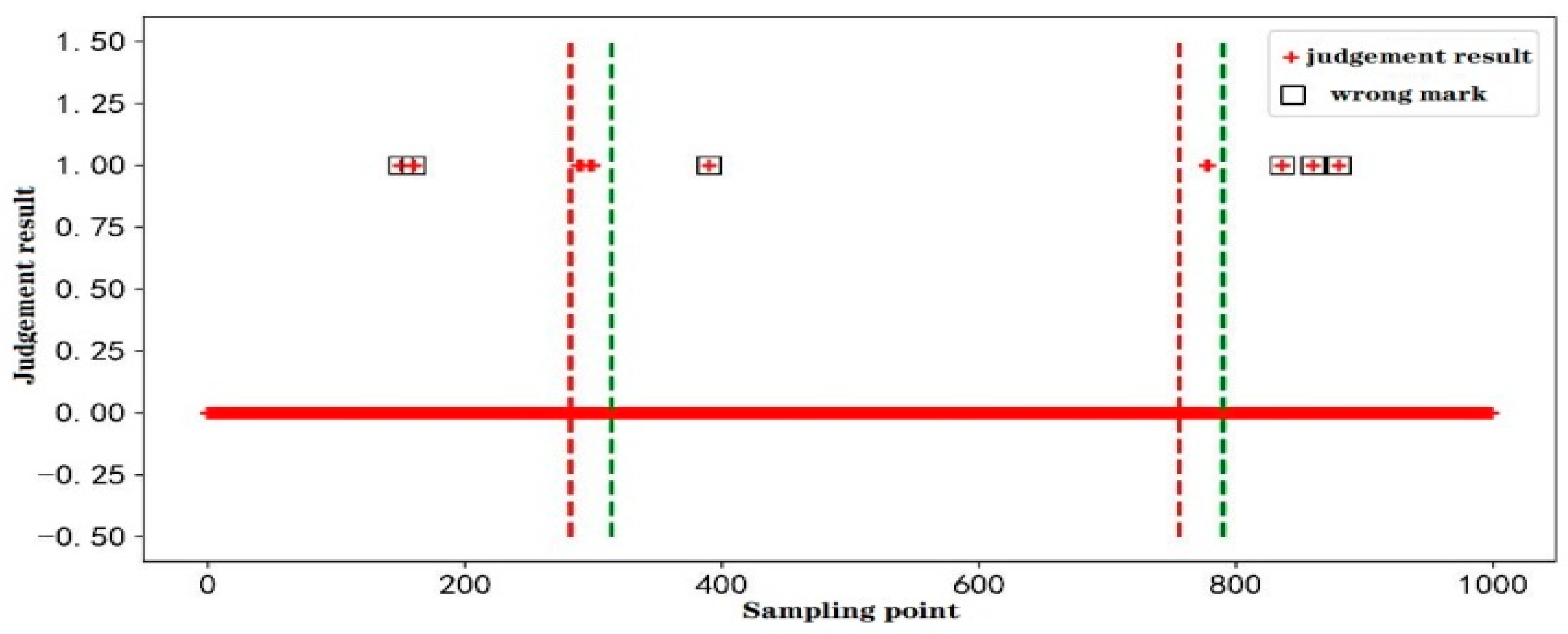
4.2. The Results and Analysis of Initial Intention Detection
4.2.1. The Results of Initial Intention of the Action
4.2.2. Feature Analysis
4.3. The Results and Analysis of Exercise Status Recognition
4.3.1. Recognition Results of Motion State
4.3.2. Feature Analysis
5. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Li, C.; Xu, J.; Kuang, S.; Qu, W.; Hu, H.; Sun, L. To Identify Motion Pattern of Lower Limbs by Using Cerebral Hemoglobin Information during Motor Imagery. In Proceedings of the 2017 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 26–27 August 2017. [Google Scholar]
- Myrden, A.; Chau, T. Effects of user mental state on EEG-BCI performance. Front. Hum. Neurosci. 2015, 9, 308. [Google Scholar] [CrossRef] [PubMed]
- Tung, S.W.; Guan, C.; Kai, K.A.; Kok, S.P.; Chuan, C.W.; Ling, Z.; Wei, P.T.; Effie, C. Motor imagery BCI for upper limb stroke rehabilitation: An evaluation of the EEG recordings using coherence analysis. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 261–264. [Google Scholar]
- Ge, S.; Yang, Q.; Wang, R.; Lin, P.; Gao, J.; Leng, Y.; Yang, Y.; Wang, H. A Brain-Computer Interface Based on a Few-Channel EEG-fNIRS Bimodal System. IEEE Access 2017, 5, 208–218. [Google Scholar] [CrossRef]
- Rota, G.; Handjaras, G.; Sitaram, R.; Birbaumer, N.; Dogil, G. Reorganization of functional and effective connectivity during real-time fMRI-BCI modulation of prosody processing. Brain Lang. 2011, 117, 123–132. [Google Scholar] [CrossRef] [PubMed]
- Chowdhury, A.; Raza, H.; Meena, K.Y.; Dutta, A.; Prasad, G. An EEG-EMG correlation-based brain-computer interface for hand orthosis supported neuro-rehabilitation. Neurosci. Methods 2019, 15, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Zhai, W.; Yang, Y.; Lu, S.; Gao, N. Brain computer interface system research of upper limb rehabilitation training robot. Res. Biomed. Eng. 2019, 3, 269–274. [Google Scholar]
- Suzuki, Y.; Kaneko, N.; Sasaki, A.; Fumiya, T.; Kimitaka, N.; Taishin, N.; Matija, M. Muscle-specific movement-phase-dependent modulation of corticospinal excitability during upper-limb motor execution and motor imagery combined with virtual action observation. Neurosci. Lett. 2021, 755, 135907. [Google Scholar] [CrossRef] [PubMed]
- Glowinski, S.; Krzyzynski, T.; Bryndal, A.; Maciejewski, I. A Kinematic Model of a Humanoid Lower LimbExoskeleton with Hydraulic Actuators. Sensors 2020, 20, 6116. [Google Scholar] [CrossRef] [PubMed]
- Hong, K.S.; Khan, M.J.; Hong, M.J. Feature Extraction and Classification Methods for Hybrid fNIRS-EEG Brain-Computer Interfaces. Front. Hum. Neurosci. 2018, 12, 246. [Google Scholar] [CrossRef] [PubMed]
- Tsuzuki, D.; Jurcak, V.; Ksingh, A.; Okamoto, M.; Eiju, W.; Dan, I. Virtual spatial registration of stand-alone fNIRS data to MNI space. Neuroimage 2007, 34, 1506. [Google Scholar] [CrossRef] [PubMed]
- Saha, S.; Nesterets, Y.; Rana, R.; Tahtali, M.; Gureyev, T.E. EEG source localization using a sparsity prior based on Brodmann areas. Int. J. Imaging Syst. Technol. 2014, 27, 333–344. [Google Scholar] [CrossRef]
- Bhateja, V.; Verma, R.; Mehrotra, R.; Urooj, S. A Non-Linear Approach to ECG Signal Processing using Morphological Filters. Int. J. Meas. Technol. Instrum. Eng. (IJMTIE) 2013, 3, 46–59. [Google Scholar] [CrossRef]
- Jin, H.; Li, C.; Sun, L.; Hu, H.; Xu, J.; Qu, W. To classify two-dimensional motion state of step length and walking speed by applying cerebral hemoglobin information. In Proceedings of the 2017 10th International Conference on Human System Interactions (HIS), UIsan, Korea, 17–19 July 2017. [Google Scholar]
- Yang, L.; Song, Y.; Ma, K.; Su, E.; Xie, L. A novel motor imagery EEG decoding method based on feature separation. J. Neural Eng. 2021, 18, 036022. [Google Scholar] [CrossRef]
- Mahmoodin, Z.; Mansor, W.; Lee, K.Y.; Mohamad, N.B. An analysis of EEG signal power spectrum density generated during writing in children with dyslexia. In Proceedings of the 2015 IEEE 11th International Colloquium on Signal Processing & its Applications (CSPA), Kuala Lumpur, Malaysia, 6–8 March 2015. [Google Scholar]
- Wu, T.; Yan, G.; Yang, B.; Sun, H. EEG feature extraction based on wavelet packet decomposition for brain-computer interface. Measurement 2008, 41, 618–625. [Google Scholar]
- Chaudhary, U.; Birbaumer, N.; Ramos-Murguialday, A. Brain-computer interfaces for communication and rehabilitation. Nat. Rev. Neurol. 2016, 12, 513. [Google Scholar] [CrossRef] [PubMed]
- Durgabai, R.P.L.; Ravi, B.Y. Feature selection using ReliefF algorithm. Int. J. Adv. Res. Comput. Commun. Eng. 2014, 3, 8215–8218. [Google Scholar] [CrossRef]
- Kus, R.; Valbuena, D.; Zygierewicz, J.; Malechka, T.; Graeser, A.; Durka, P. Asynchronous BCI Based on Motor Imagery with Automated Calibration and Neurofeedback Training. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 823–835. [Google Scholar] [CrossRef] [PubMed]
- Ma, T.; Wang, S.; Xia, Y.; Zhu, X.; Evans, J.; Sun, Y.; He, S. CNN-based classification of fNIRS signals in motor imagery BCI system. J. Neural Eng. 2021, 18, 056019. [Google Scholar] [CrossRef] [PubMed]
- Trakoolwilaiwan, T.; Behboodi, B.; Lee, J.; Kyungson, K.; Ji-Woong, C. Convolutional neural network for high-accuracy functional near-infrared spectroscopy in a brain-computer interface: Three-class classification of rest, right-, and left-hand motor execution. Neurophotonics 2018, 5, 011008. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Gong, A.; Fu, Y. Identification of One—Hand Sign Language Based on fNIRS. J. Kunming Univ. Sci. Technol. (Nat. Sci.) 2020, 45, 74–81. [Google Scholar]
- Keum-Shik, H.; Noman, N.; Yun-Hee, K. Classification of prefrontal and motor cortex signals for three-class fNIRS–BCI. Neurosci. Lett. 2015, 587, 87–92. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Element | Amplitude | Width | ||
|---|---|---|---|---|
| Cosine | 0.8 | 70 | 11.9419 | 0.000219995 |
| Triangle | 1.2 | 60 | 8.19086 | 0.000320125 |
| semicircle | 1 | 70 | 13.0082 | 0.000197746 |
| Straight line | 1 | 50 | 14.9635 | 0.000162624 |
| Accuracy Rate | False Judgment Rate | Discrimination Delay (s) | Comprehensive Index | |
|---|---|---|---|---|
| Train | 94.4% | 1.1% | −0.267 | 1.200 |
| Test | 92.5% | 2.1% | −0.067 | 0.971 |
| Accuracy Rate | False Judgment Rate | Discrimination Delay (s) | Comprehensive Index | |
|---|---|---|---|---|
| Train | 92.5% | 1.4% | −0.202 | 1.113 |
| Test | 90.0% | 2.5% | −0.073 | 0.948 |
| Classifier | SVM | Logistic Regression | Naive Bayes | LDA |
|---|---|---|---|---|
| Best Kappa coefficient | 0.792 | 0.775 | 0.692 | 0.758 |
| Lifting-Up | Putting Down | Pulling Back | Pushing Forward | Average | Variance | Kappa Coefficient | |
|---|---|---|---|---|---|---|---|
| Train | 90.0% | 82.5% | 82.5% | 82.5% | 84.4% | 0.001 | 0.792 |
| Test | 90.0% | 70.0% | 90.0% | 80.0% | 82.5% | 0.007 | 0.767 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Xu, Y.; He, L.; Zhu, Y.; Kuang, S.; Sun, L. Research on fNIRS Recognition Method of Upper Limb Movement Intention. Electronics 2021, 10, 1239. https://doi.org/10.3390/electronics10111239
Li C, Xu Y, He L, Zhu Y, Kuang S, Sun L. Research on fNIRS Recognition Method of Upper Limb Movement Intention. Electronics. 2021; 10(11):1239. https://doi.org/10.3390/electronics10111239
Chicago/Turabian StyleLi, Chunguang, Yongliang Xu, Liujin He, Yue Zhu, Shaolong Kuang, and Lining Sun. 2021. "Research on fNIRS Recognition Method of Upper Limb Movement Intention" Electronics 10, no. 11: 1239. https://doi.org/10.3390/electronics10111239
APA StyleLi, C., Xu, Y., He, L., Zhu, Y., Kuang, S., & Sun, L. (2021). Research on fNIRS Recognition Method of Upper Limb Movement Intention. Electronics, 10(11), 1239. https://doi.org/10.3390/electronics10111239