Abstract
This research evaluates the impact of In-vehicle Signal Advisory System (ITSAS) on signalized arterial. ITSAS provides individual drivers equipped with a mobile communication device with advisory speed information enabling to minimize the time delay and fuel consumption when crossing intersection. Given the instantaneous vehicular driving information, such as position, speed, and acceleration rate, ITSAS produces advisory speed information by taking into consideration the traffic signal changes at a downstream intersection. The advisory speed information includes not only an optimal speed range updated every 300-ft for individual drivers but also a descriptive message to warn drivers stop to ensure safety at the downstream intersection. Unlike other similar Connected Vehicles applications for intersection management, ITSAS does not require Roadside Equipment (RSE) to disseminate the advisory speed information as it is designed to exploit commercial cellular network service (i.e., 3G and 4G-LTE). Thus, ITSAS can be easily plugged into existing traffic control management system to rapidly conduct its implementation without significant additional cost. This research presents the field evaluations of ITSAS on a signalized corridor in New Jersey, which discovered significant travel time savings for the equipped vehicle.
1. Introduction
Recent advancements in mobile communications technologies enable vehicles to connect with other adjacent vehicles and infrastructure in real-time, forming a Connected Vehicle (CV) environment. By allowing two-way wireless vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication, CV is expected to produce unseen benefits by dramatically improving the performance of the world-wide transportation system in terms of its safety, mobility, and sustainability. Numerous relevant applications exploiting the CV environment have been proposed by multiple stakeholders including automotive manufacturers, Information Technology (IT) industries, and transportation-related agencies. While automotive manufacturers have fixed on V2V-based safety applications, such as driver assistance, collision avoidance [1], blind spot prevention [2], and lane changing assistance systems [2], federal and state governments in the US have primarily focused on V2I-based applications to achieve a safer, faster, and greener transportation system. The U.S. DOT has initiated several CV applications particularly focusing on the improvement of mobility and environment, namely Dynamic Mobility Applications (DMA) [3] and Applications for the Environment: Real-time Information Synthesis (AERIS) [4]. There are also a few CV pilot studies conducted by state DOTs, such as a real-world CV test-bed in Northern Virginia [5], and a Cooperative Adaptive Cruise Control (CACC) application test-bed supported by CalTrans [6].
Until now, Dedicated Short Range Communications (DSRC) is the primary communications protocol for CV applications. DSRC is based on IEEE 802.11p and IEEE 1609 standards [7]. However, to properly implement CV applications, DSRC requires both On-Board Equipment (OBE) and Roadside Equipment (RSE) which requires additional user and infrastructure costs. The current CV DSRC protocol for Basic Safety Message (BSM) mandates 0.1 s of message dissemination interval to ensure reliable data exchanges considering potential communications failures under vehicular ad-hoc network (VANET) [8]. Obviously, this protocol is adequate for safety-critical CV applications, such as collision avoidance, cooperative adaptive cruise control, and lane change assistance, which rely heavily on V2V communications. Except for a few V2I applications designed for intersection safety improvement like Cooperative Intersection Collision Avoidance System (CICAS) [9], many V2I CV applications primarily focus on congestion management, freeway traffic operation, intersection control, and traffic monitoring, which are less sensitive to communication failure. Furthermore, in case of intersection control and management, Signal Phase and Timing (SPaT) messages [8] can be disseminated via non-DSRC communications protocols. Reflecting these two facts more recently, CV applications are proposed to exploit any available communication technologies, such as Cellular Network (e.g., 3G/4G-LTE), WiFi, and Bluetooth. The rationale for this change is to increase the potential for CV participation and market penetration by expanding its usability and connectivity.
The In-vehicle Signal Advisory System (ITSAS) presented in this project is a DSRC-free CV application with a viable implementation potential in the near future without major infrastructure investments required for RSE installation. The ITSAS application provides drivers through an in-vehicle communication device with real-time speed guidance enabling to minimize the time delay when crossing intersections. Unlike other similar CV applications used for intersection management, such as Multi-Modal Intelligent Traffic Signal System (a.k.a, MMITSS) [10] in DMA and Eco-Signal Operations in AERIS bundles, ITSAS does not require RSE for each intersection to disseminate the advisory information. The reason is that ITSAS is designed to exploit commercial cellular network service (i.e., 3G and 4G-LTE). Interestingly, ITSAS can be easily plugged into an existing traffic control management system to capture real-time traffic signal data, thus enabling rapid implementation without significant additional cost. Moreover, benefits of the ITSAS implementations are achieved through better vehicle progression. A vehicle equipped with an ITSAS unit tends to adjust its speed according to the applied signal timing scheme which allows vehicle to move along the signalized corridor without coming to a stop.
The remainder of this paper is organized as follows. The next section summarizes relevant research efforts conducted in the field of V2I communication, speed assistance and dynamic eco-driving algorithms. The “Advisory Speed Algorithm” explains how the proposed advisory speed algorithm works and how the advisory speed is calculated using vehicle position and signal status. The “ITSAS Mobile Application” introduces Android mobile application that is designed to deliver advisory speed to the end user with its user interface and features. The “Field Evaluations” reveals travel time values obtained in the field and provides comparisons between ITSAS-equipped and non-equipped vehicles in the real world traffic conditions.
2. Literature Review
Many researchers around the world focused on developing dynamic optimal speed advising systems on the vehicle side. Such systems allow adjustment of the vehicle trajectory while taking into consideration signal status, in order to achieve optimal speed while improving intersection safety, and minimizing fuel consumption and vehicle emissions. Several studies have addressed the application of the variable speed algorithms for arterial traffic. Jiménez et al. [11] examined influence of giving optimal speed advice to the drivers in order to improve safety. By observing current weather conditions, road grade, and traffic conditions, an optimal speed was calculated.
Besides focusing on traffic safety, some authors observed traffic network operations [12,13,14,15,16]. Abu-Lebdeh and Chen used dynamic speed control (DSC) to optimize the operation of signalized networks [12]. The analysis shows that using DSC in signalized networks can improve the operation of signalized networks by increasing throughput, decreasing delay and the number of stops. With the recent achievements in the field of the communication between vehicles and road infrastructure (V2I), it is now possible to deliver the current state of the signalization to a vehicle. With respect to that aspect, Morsink et al. [13] and Barbe et al. [14] observed the possibility of utilizing in-car speed assistance to improve speed management and reduce fuel consumption. Similarly, several researchers have studied speed guidance systems for arterial traffic. Yang et al. [15] and Mandava et al. [16] have developed an advisory speed algorithm that provides driver with the optimal speed so the probability of having a green light at the downstream intersection is maximized. The study recommended taking advantage of the communication technology between vehicles and roadside infrastructure (V2I). In such cases, the vehicle receives the signal state and timing information in advance while approaching the signalized intersection. Based on collected information it is possible to provide an advisory speed for the vehicle to pass an intersection without coming to a stop. According to modeling results, the energy/emission savings for vehicles that utilize this velocity planning algorithm are found to be 12–14% [17,18].
It is clear that driving gently and reducing the number of stops are key factors for reducing fuel consumption and emissions [17,18]. Thus, several authors investigated the possibility of optimizing vehicle trajectory by utilizing vehicle to infrastructure (V2I) communications protocol. Rakha and Kamalanathsharma [19] observed the possibility of utilizing V2I communications to optimize fuel consumption and emissions caused by signalized intersections. The methodology assumed instantaneous advisory speed information to drivers where vehicle trajectory is projected to determine the future position of the vehicle. The advisory speed logic provides optimal speeds by taking into consideration signal and traffic flow status, with the main goal of vehicle stop and emission reduction. A combined optimum is calculated using mode-specific fuel consumption and emission levels. Similarly, Barth et al. [20] introduced a dynamic eco-driving velocity planning algorithm. The methodology concept took advantage of the real-time traffic sensing and infrastructure information. The signal phase and timing information of a downstream intersection are provided to a vehicle and used to calculate an optimal approaching speed. The algorithm produces benefits by minimizing average acceleration/deceleration rates and reducing fuel consumption and emissions. According to simulation results, approximately 12% fuel economy improvement is expected. Niu and Sun [21] also developed eco-driving and green wave speed guidance systems for signalized arterial. Based on multi-vehicle driving simulator platform, the test was conducted to examine two dynamic speed guidance strategies through in-car display: (1) green wave speed guidance strategy (GWSGS) and (2) eco-driving speed guidance strategy (EDSGS). While the main objective of GWSGS was to minimize the number of stops along the corridor, EDSGS strategy focuses mainly on CO2 and fuel consumption. It was found that the number of stops can be significantly reduced for the vehicles utilizing GWSGS and EDSGS, and fuel consumption and CO2 emissions can be reduced by 13% and 25% under the GWSGS and EDSGS respectively. Furthermore, Sun et al. [22] examined the effectiveness of dynamic speed guidance (DSG) through both in-vehicle display for individual guidance and the roadside display. As in the previous study, the multi-vehicle driving simulator was used for the evaluation of DSG showing that the DSG brings a promising benefit for the arterial coordinated control system. The results also indicate that the in-vehicle speed guidance provides a significant benefit for on-board unit equipped vehicles, even in a low level of market penetration rate.
In summary, various studies were conducted to evaluate the effectiveness of the speed advisory algorithms but only a few research efforts have been made to estimate impact of a personal speed advisory system in the field. Unlike many previous efforts, the methodology presented in this paper successfully deals with an actuated signal control scheme. Although a notable effort was made to properly estimate impact of the advisory speed concept by utilizing modeling and simulation, not many research efforts were aimed toward an actual implementation of the concept. Few authors developed adequate on-board equipment in order to examine the concept, yet those on-board solutions are not suitable for massive and easy deployment. This is extremely important from the aspect of the large scale evaluation and real-world application. On the top of the road-side equipment (RSE) elimination, which is necessary for the successful implementation of the V2I or SPaT concept, the research idea of this paper reveals a viable option for the introduction of the connected vehicle concept without any additional investments for road users and authorities.
3. ITSAS Overall System Architecture
ITSAS comprises both communication and computation components based on consumer mobile devices (e.g., smartphone, tablet PC) that are readily available in the market. The system architecture was designed in such a way that it does not require expensive RSE equipment and the computational burden is easily handled by the mobile device. In addition, communication protocol allows for the exploitation of the cellular network with no need for DSRC, thereby pursuing a DSRC-free CV application.
Figure 1 depicts high-level system architecture for the entire ITSAS, including (1) ITSAS mobile application; (2) ITSAS manager; (3) a staging server. Real-time vehicular information, such as instantaneous speed, position, and acceleration/deceleration rates is collected by the ITSAS mobile application. Vehicles equipped with the ITSAS mobile application connects to the ITSAS manager located in the NJIT research laboratory. Traffic signal controllers in the intersections push concurrent signal timing data to the NJIT ITSAS manager through a staging server located in New Jersey Department of Transportation (NJDOT) with 1 s update interval. It must be noted that the reason for the staging server is because of the potential security risk when allowing direct connection between traffic signal controllers and the ITSAS manager. Thus, drivers in the ITSAS-equipped vehicles are able to obtain current traffic signal status on the go through the ITSAS mobile application. In the meantime, the ITSAS mobile application acquires the current position information by using a GPS unit embedded in the mobile device (e.g., Android smartphone) to estimate the distance to the downstream intersection. Although an average smartphone device is likely to produce an usual GPS error (approximately 5–7 m) such error did not produce any safety related problems. Since the target distance where the ITSAS speed advisory was initiated was usually 200–400 m, assumed GPS error produced roughly 0.5–0.8 s early/late arrival. The field test indicated that such error is easily corrected by the driver in the very las few meters from the stop bar.
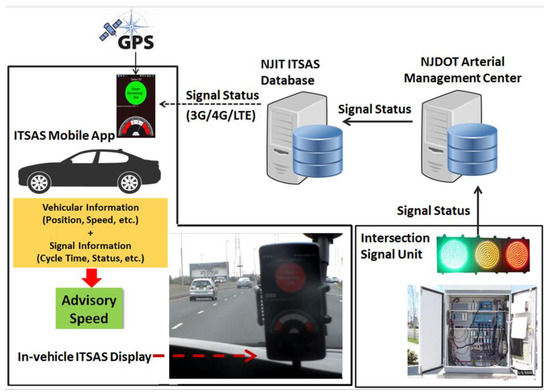
Figure 1.
High-level ITSAS System Architecture.
The ITSAS mobile application accesses the NJIT ITSAS manager through commercial cellular network service (e.g., 3G, 4G/LTE) to acquire real-time signal status data required for obtaining advisory speed information for the downstream intersection. The communication delay observed in the field was insignificant (below 1 s) allowing algorithm calculations to stay within acceptable accuracy range. With both vehicular information and signal controller data, the ITSAS mobile application estimates the advisory speed information and conveys it to the driver by using a display panel on the mobile device as shown in Figure 1. In order to estimate performance measures, such as travel time, speed, and delay, both vehicular and signal controller data are archived along with the associated speed advisory information in a database of the ITSAS manager. In case of cellular connection failure, the device was designed to automatically stop providing the advisory speed information to avoid potentially hazardous situations.
4. Advisory Speed Algorithm
The ITSAS mobile application calculates advisory speed with 1-s update interval in order to accurately reflect the current status of the signal control and vehicle information. Figure 2 shows the flowchart of ITSAS advisory speed algorithm implemented by the ITSAS mobile application that will be addressed in the next section in detail. Depending on the signal status (i.e., Red, Green, and Yellow) obtained from the ITSAS manager, the ITSAS application estimates either the remaining green or red time, denoted by rg and rr, respectively, by using Equations (1) and (2)
where,
rg = GreenEnd + Amber − ss
rr = RedEnd − ss
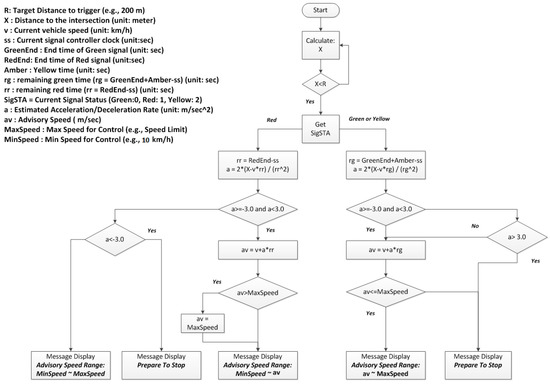
Figure 2.
ITSAS Algorithm.
- ss: Current signal controller clock (unit: s)
- GreenEnd: End time of Green signal (unit: s)
- RedEnd: End time of Red signal (unit: s)
- Amber: Yellow time interval (unit: s)
- rg: remaining green time (unit: s)
- rr: remaining red time (unit: s)
Unlike pre-timed traffic control systems in which the green time is always fixed, the end of green on an actuated control system is flexible depending on the call status of the minor streets. To deal with such an uncertainty for the end of green time in the actuated control system, the ITSAS server estimates the probability of the green end by monitoring the historical green time changes. Figure 3 shows an example of the green probability of a main street through-phase captured from a coordinated-actuated intersection. With historical signal status data archived in the ITSAS manager, the green time end probabilities of all the intersections are updated on a daily basis. Figure 3 illustrates an example of the probability plot for a phase serving the main street. For each cycle-second of the corresponding phase, the probability of green was calculated using historical data for the same period of the day and week. It is necessary to note that for the field implementation of ITSAS, 90% green end probability is adopted to calculate the remaining green time.
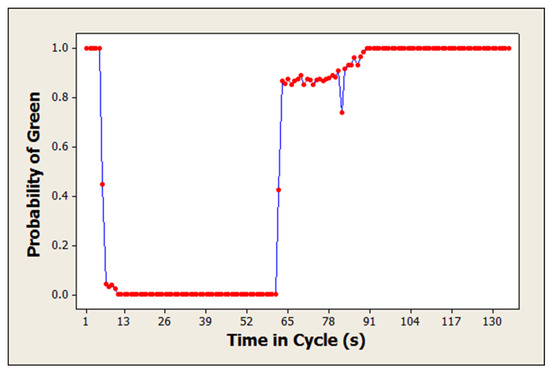
Figure 3.
Probability of Green Time.
In the case of remaining green time, the ITSAS application estimates the desired acceleration and/or deceleration rate, denoted by a in Figure 2, to check whether the driver can pass through the intersection within the remaining green time with the reasonable acceleration/deceleration range. Taking into consideration driver comfort, vehicle performance, and traffic safety, we adopted ±3 m/s2 rate as the boundary rate for the field implementation of ITSAS. That is, if the desired acceleration rate is greater than 3 m/s2, a “PREPARE TO STOP” message will be disseminated to the driver through the built-in display of the mobile device that the ITSAS application is operated. Contrarily, in case of an acceleration rate less than −3 m/s2 (i.e., deceleration), which indicates plenty of remaining green time for the driver to cross the intersection from the current position, the advisory speed will be same as the speed limit of the street. If the desired acceleration rate is within the boundary rates, the ITSAS application calculates the advisory speed, denoted by av in Figure 2, by incorporating the current speed v, desired acceleration rate a, and distance to the downstream intersection X. Unless the advisory speed exceeds the speed limit, the ITSAS application will provide the driver with the speed guidance ranging from the advisory speed (i.e., av) as the minimum speed, to the speed limit as the maximum speed to maintain. Otherwise, the “PREPARE TO STOP” message will be provided to the driver to avoid a potential speed limit violation. Following the same logic, the remaining red time case will generate the advisory speed guidance, thereby resulting in three cases: (1) “PREPARE TO STOP”; (2) minimum to maximum speed range; and (3) minimum to the advisory speed range, depending on the desired acceleration/deceleration rate. Figure 4 conceptually illustrates the speed guidance cases that the ITSAS application produces for the driver.
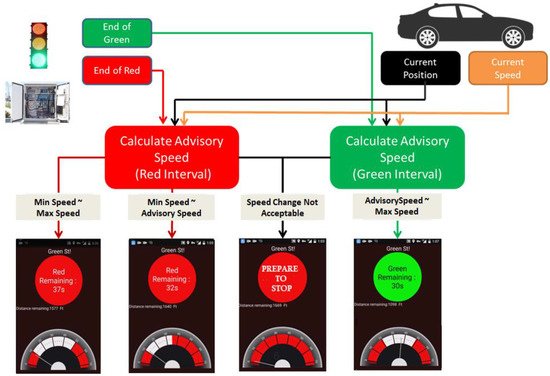
Figure 4.
ITSAS speed guidance cases.
5. ITSAS Mobile Application
As aforementioned, the ITSAS mobile application conducts the advisory speed calculation by integrating vehicular information and real-time traffic signal controller data. In addition, the ITSAS application provides a graphical user interface (GUI) to adequately deliver advisory speed information to an end user. To this end, the NJIT research team developed an Android-based GUI for the ITSAS mobile application. The user interface depicted in Figure 5 is consisted of the signal status indicator and a speed gauge showing advisory speed range (i.e., min and max speeds) along with a current vehicle speed indicator using an on-screen dial. Remaining distance to the downstream intersection, calculated using a GPS unit embedded in android device, is also presented to the end user. The ITSAS mobile application is suitable for massive deployment in the field and does not require any special skills on the user’s side.
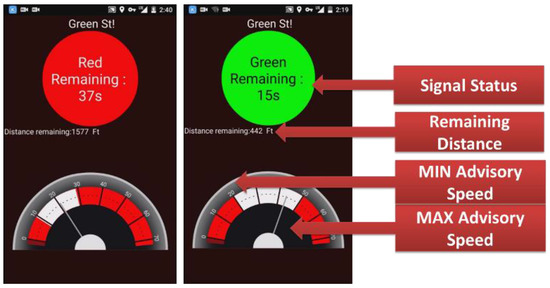
Figure 5.
ITSAS mobile application user interface.
6. Field Evaluations
6.1. Field Evaluation Site
The test bed selected for the ITSAS evaluation study was located in Woodbridge Township, New Jersey. A section of US-1, illustrated in Figure 6, is located in Middlesex County, between Plainfield Avenue and Green Street. The location was selected as the experiment corridor due to its traffic, land use characteristics, and data availability for real-time traffic signal data. The experiment section is about 6.5 miles long, with mainly seven lanes in two directions (four lanes north-east, and three lanes south-west direction). Coordinated-actuated intersections often include jug-handle ramps with no left turns allowed from the main line (i.e., US 1). The area is surrounded by different types of residential and business related activities generating urban traffic conditions along the route with a maximum speed limit of 55 mph.
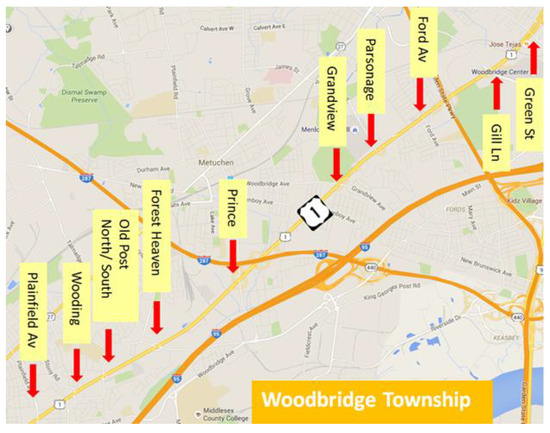
Figure 6.
ITSAS test-bed corridor in Woodbridge, New Jersey.
Under the technical partnership with the New Jersey Department of Transportation (NJDOT), the NJIT research team obtained access to the NJDOT Arterial Management Center (AMC). The signal control system on the selected test corridor is managed by NJDOT AMC through a commercial arterial management solution [23]. Real-time traffic controller data which are crucial for the field implementation of ITSAS, such as current phase information, max/min greens, and vehicle and pedestrian call status, are fed into and archived at the NJDOT AMC. By capturing a live feed disseminated from a staging server at the NJDOT AMC to the NJIT ITSAS manager, the ITSAS mobile application was implemented as discussed in the previous section.
6.2. Data Collection
Figure 7 is a snapshot captured during the field evaluation conducted on 26 October 2015. To conduct realistic and valid evaluations, the system was tested during three distinctive time-of-day periods covering a.m.-peak (i.e., 8 a.m.–10 a.m.), Off-peak (i.e., 1 p.m.–5 p.m.), and midnight (i.e., 10 p.m.–12 a.m.). The main purpose of the multiple-period testing approach was to include different traffic congestion and signal timing conditions, generally observed throughout the day.

Figure 7.
ITSAS field test.
The travel time data was collected using a test vehicle equipped with an ITSAS device for the periods mentioned above. The test vehicle started collecting data from the first intersection (US 1 at Green Street) and moved southbound following an advisory speed provided by ITSAS. The data collection, with ITSAS information continued until the end of the observed time-of-day period, providing approximately three to four data collection cycles per hour. Driver behavior during the test was not by any means predefined, and it included regular driving routine. The field observations, however, revealed that drivers performed additional efforts toward lane-change maneuvers when the advisory speed and the remaining green time were provided.
It must be noted that the test vehicle driver with ITSAS was allowed to conduct necessary lane changing maneuvers to follow the advisory speeds if available under the prevailing traffic congestion condition during the field evaluation.
6.3. Field Evaluation Results and Discussion
During the field evaluation, it was observed that the vehicle guided by ITSAS obtained promising gains with respect to travel time savings over the prevailing travel traffic measured using the third-party probe data (i.e., INRIX).. As summarized in Table 1, the average travel times with and without ITSAS were 10.3 and 13 min, respectively, resulting in approximately 3 min of average travel time savings during the test. Since the test corridor is a coordinated arterial, ITSAS enabled the test vehicle to stay in the boundaries of the corridor bandwidth by providing the advisory speed ranges for each intersection in the test corridor. Including the “Prepare to Stop” message, the test vehicle driver conducted necessary lane-changing maneuvers to keep the advisory speed information if allowed. As a result, the ITSAS-guided test driver was able to minimize the number of stops at the intersections, which ended up the same effect as maintaining cruising conditions within the green band among the intersections. It was also observed that the right-most lane have more roadside activities than the inside lanes, thereby resulting in uneven lane utilizations. Correspondingly, test drivers without advisory speed information (i.e., normal drivers) tend to stay in the inside lanes (e.g., the left-most and the second left-most lane) even if the right-most lane is often less congested than the inside lanes. Given the test arterial with 11 signalized intersections where the average cycle length is about 120–160 s, even one stop at an intersection would produce significant change between vehicles with and without the advisory information. Therefore the ITSAS test vehicle achieved such overall travel time reductions for the entire corridor.

Table 1.
Field test results.
The travel time savings for each time period is also of interest. As summarized in Table 1, the travel time savings appeared more obvious during a.m. peak and off-peak periods. Figure 8 provides a more clearly defined vision on the relationship between traffic congestion and travel time savings by ITSAS. Figure 8 shows average, upper/lower 5 and 25 percentile travel time data, illustrated by a solid line marked in red, a light shaded band, and a dark shaded band, respectively, which are captured by a commercial probe data provider for the test corridor on the evaluation date. The commercial probe data (i.e., INRIX) comprises crowd sourcing traffic data from GPS based devices and cellular phone networks for the road segments where the field evaluation was conducted. Compared to the midnight period (10 p.m.–12 a.m.), during a.m. and off-peak periods, the average travel times by ITSAS are higher. This observation indicates that the traffic conditions during the peak periods likely prevent the complete freedom of choice for lane changing maneuvers to keep the advisory speed set by ITSAS due to prevailing congestion; thus, the vehicle is often forced to follow the prevailing speed maintained by the surrounding traffic. This is the primary reason why the average travel times by ITSAS are higher than that of the midnight period. On the other hand, travel time savings from the peak periods outperformed the midnight period. Despite 3 min of travel time savings, the test vehicle without ITSAS during the a.m. and off-peak periods showed significantly higher travel times. Taking into consideration congestion conditions for both congestion periods, the non-ITSAS test vehicle went through the prevailing congestions without having any opportunities to avoid them. Thus, unlike the ITSAS vehicle, no confident reasons to conduct lane changing activities occurred, thereby resulting in such high travel times. Obviously, the travel time savings from the a.m.- and off-peak periods were obtained by high travel times caused by prevailing traffic congestions.
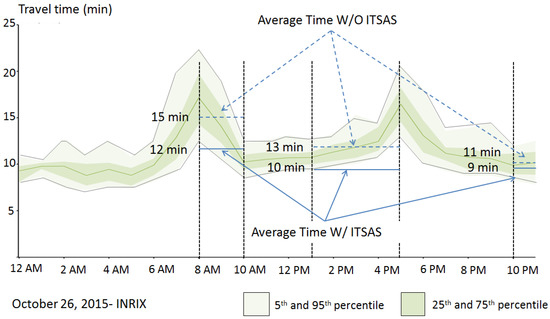
Figure 8.
Corridor congestion and travel time w/ and w/o ITSAS.
7. Conclusions
As various technological solutions in the area of connected vehicles are becoming closer to reality, the main focus of researchers around the globe is aimed toward legislation and safety concerns following the process of implementation. In particular, some CV solutions cannot achieve noticeable benefits without large market penetration rates which cannot be achieved without well-settled legislative foundations. As aforementioned, the U.S. DOT has initiated several CV applications in the area of intersection management, such as Multi-Modal Intelligent Traffic Signal System and Eco-Signal Operations. To apply such solutions, deploying the road-side equipment and an on-board unit is required, and needs substantial time and cost to achieve sizable benefits.
The ITSAS proposed in this project is a DSRC-free CV application for signalized arterials. Utilizing consumer mobile devices (e.g., smartphone and tablet PC) and commercial wireless networks (e.g., AT&T, Verizon) that are readily available for ordinary road users, ITSAS provides drivers with advisory speed guidance enabling them to save travel time. On the 6.5-mile test corridor, travel time savings of up to 3 min were recorded. Differences between ITSAS and the unequipped vehicle were more obvious during a.m. and off-peak hours, resulting in 20% to 23% of travel time savings for the ITSAS case. The primary reason for better performance during the a.m. and off-peak is because the ITSAS vehicle became confident when conducting flexible driving maneuvers, including lane changes to follow the advisory speed, which ended up with less chance to be stopped at the intersection. In addition, during a.m.- and off-peak periods, traffic flow density is significantly higher than during the midnight period. Thus it was more challenging to adhere to the recommended advisory speed, thereby resulting in higher travel time by ITSAS during the a.m.- and off-peak periods, compared to the midnight period.
Eventually, the large market penetration rates for ITSAS applications can be achieved gradually. Moreover, the possibility of using a mobile application provides an opportunity for a rapid expansion and popularity enhancement via mass media. A deeper investigation of ITSAS with larger numbers of ITSAS equipped vehicles should be conducted in order to reveal benefits under large market penetration rates. By observing the impact of ITSAS on a single vehicle, it appears logical to forecast large mobility and environmental improvements. In addition, the implementation of ITSAS opens a further possibility of developing two-way, cooperative, and vehicle to intersection communication for the next generation signalized corridor management.
8. Future Research
During the field test, it was frequently observed that ITSAS would likely improve safety conditions when crossing intersections by providing individual drivers with direct visual aids for traffic signals. Particularly, in the case of a driver’s temporary visual failure to the signal heads caused by a heavy vehicle up front in the flow, the ITSAS application has provided drivers with alternative information for real-time traffic signal status. Furthermore, while not focusing on a dilemma zone, the advisory speed along with remaining green time conveyed through the ITSAS application also helped drivers avoid dilemma zone conditions. Thus, by making the drivers under such dangerous conditions feel safe, it is certainly expected to produce safety benefits. Unlike mobility and environment evaluations, properly examining safety performance for CV applications has been challenging as it requires human factors to be involved for the evaluation. As future research, it is necessary to explore the safety impacts of ITSAS by developing an innovative evaluation tool integrating human factors and CV components. Some additional efforts should be aimed toward implementation of the prevailing traffic flow parameters into the advisory speed algorithm. Such information is likely to minimize difference between recommended and actual speed, influenced by prevailing traffic flow. Although existing algorithm was designed to reduce the number of stops and increase overall mobility, the algorithm can be modified to achieve emission (e.g., CO2) reduction and fuel saving as the main indicators of performance.
Acknowledgments
The authors would like to acknowledge and thank the NJDOT Transportation Systems Management for supporting this project through ITS Resource Center at NJIT, whose research faculty and staff participated in this research.
Author Contributions
Joyoung Lee, Branislav Dimitrijevic, Jeevanjot Singh and Lazar Spasovic conceived the idea. All authors developed the overall system architecture and methodology; Joyoung Lee, Branislav Dimitrijevic, Slobodan Gutesa and Yuchuan Zhang performed and designed the experiments; Slobodan Gutesa and Yuchuan Zhang analyzed the data; Yuchuan Zhang performed mobile application programming and visual element design; Joyoung Lee, Branislav Dimitrijevic and Slobodan Gutesa wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Carter, A.; Chang, J. Using Dedicated Short Range Communications for Vehicle Safety Applications—The Next Generation of Collision Avoidance. In Proceedings of the 21st International Technical Conference on the Enhanced Safety of Vehicles (ESV), Stuttgart, Germany, 15–18 June 2009. [Google Scholar]
- Jurgen, R.K. V2V/V2I Communications for Improved Road Safety and Efficiency; SAE International: Warrendale, PA, USA, 2012. [Google Scholar]
- Vasudevan, M.; Wunderlich, K. Analysis, Modeling, and Simulation (AMS) Testbed Preliminary Evaluation Plan for Dynamic Mobility Applications (DMA) Program; FHWA-JPO-13-097; U.S. Department of Transportation: Washington, DC, USA, 2013.
- Pindilli, E. Applications for the Environment: Real-Time Information Synthesis (AERIS)—Benefit-Cost Analysis; Federal Highway Administration Office, U.S. Department of Transportation: Washington, DC, USA, 2012.
- McDonnell, B. Gov. McDonnell Launches I-66 Connected Vehicle Test Bed. Available online: http://www.virginiadot.org/newsroom/northern_virginia/2013/gov._mcdonnell_launches_i-6666048.asp (accessed on 26 June 2016).
- Shladover, S.E.; Nowakowski, C.; Lu, X.Y.; Ferlis, R. Cooperative adaptive cruise control (CACC) definitions and operating concepts. In Proceedings of the 94th Annual TRB Meeting, Transportation Research Board, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Hedges, C.; Perry, F. Overview and Use of SAE J2735 Message Sets for Commercial Vehicles; No. 2008-01-2650; SAE Technical Paper: Warrendale, PA, USA, 2008. [Google Scholar]
- Misener, J.A. Cooperative Intersection Collision Avoidance System (CICAS): Signalized Left Turn Assist and Traffic Signal Adaptation; No. UCB-ITS-PRR-2010-20; University of California: Berkeley, CA, USA, 2010. [Google Scholar]
- Duncan, G.; Head, K.L.; Puvvala, R. Multi-modal intelligent traffic signal system-safer and more efficient intersections through a connected vehicle environment. IMSA J. 2014, 52, 12–16. [Google Scholar]
- Jimenez, F.; Aparicio, F.; Paez, J. Evaluation of in-vehicle dynamic speed assistance in Spain: Algorithm and driver behaviour. IET Intell. Trans. Syst. 2008, 2, 132–142. [Google Scholar] [CrossRef]
- Abu-Lebdeh, G. Exploring the potential benefits of intellidrive-enabled dynamic speed control in signalized networks. In Proceedings of the Transportation Research Board 89th Annual Meeting, Washington, DC, USA, 10–14 January 2010. [Google Scholar]
- Morsink, P.L.; van Nes, N.; Walta, L.; Marchau, V. In-car speed assistance to improve speed management. In Proceedings of the 15th World Congress on Intelligent Transport Systems and ITS America’s 2008 Annual Meeting, New York, NY, USA, 16–20 November 2008. [Google Scholar]
- Barbé, J.; Boy, G. On-board system design to optimize energy management. In Proceedings of the European Annual Conference on Human Decision-Making and Manual Control (EAM 2006), Valenciennes, France, 27–29 September 2006. [Google Scholar]
- Yang, Y.; Chen, S.; Sun, J. Modeling and evaluation of speed guidance strategy in VII system. In Proceedings of the 2010 13th International IEEE Conference on Intelligent Transportation Systems (ITSC), Madeira Island, Portugal, 19–22 September 2010. [Google Scholar]
- Mandava, S.; Boriboonsomsin, K.; Barth, M. Arterial velocity planning based on traffic signal information under light traffic conditions. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009. [Google Scholar]
- Johansson, H.; Gustafsson, P.; Henke, M.; Rosengren, M. Impact of eco-driving on emissions. In Proceedings of the 12th International Symposium, Transport and Air Pollution, Avignon, France, 16–18 June 2003. [Google Scholar]
- Nishuichi, H.; Yoshii, T. A study of the signal control for the minimization of CO2 emission. In Proceedings of the 12th World Congress on Intelligent Transport Systems, San Francisco, CA, USA, 6–10 November 2005. [Google Scholar]
- Rakha, H.; Kamalanathsharma, R.K. Eco-driving at signalized intersections using V2I communication. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011. [Google Scholar]
- Barth, M.; Mandava, S.; Boriboonsomsin, K.; Xia, H. Dynamic ECO-driving for arterial corridors. In Proceedings of the 2011 IEEE Forum on Integrated and Sustainable Transportation System (FISTS), Vienna, Austria, 29 June–1 July 2011. [Google Scholar]
- Niu, D.; Sun, J. Eco-Driving versus green wave speed guidance for signalized highway traffic: A multi-vehicle driving simulator study. Procedia-Soc. Behav. Sci. 2013, 96, 1079–1090. [Google Scholar] [CrossRef]
- Sun, J.; Niu, D.; Chen, S.; Li, K. Development and Investigation of a Dynamic Eco-Driving Speed Guidance Strategy for Signalized Highway Traffic. In Proceedings of the Transportation Research Board 92nd Annual Meeting, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Adam Allen, P.E.; Ptoe, T.; Imsa, I. Developing a Traffic Signal System Optimization Plan for New Jersey, USA. Inst. Transp. Eng. ITE J. 2015, 85, 36. [Google Scholar]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).