An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review

Abstract
:1. Introduction
2. Methods
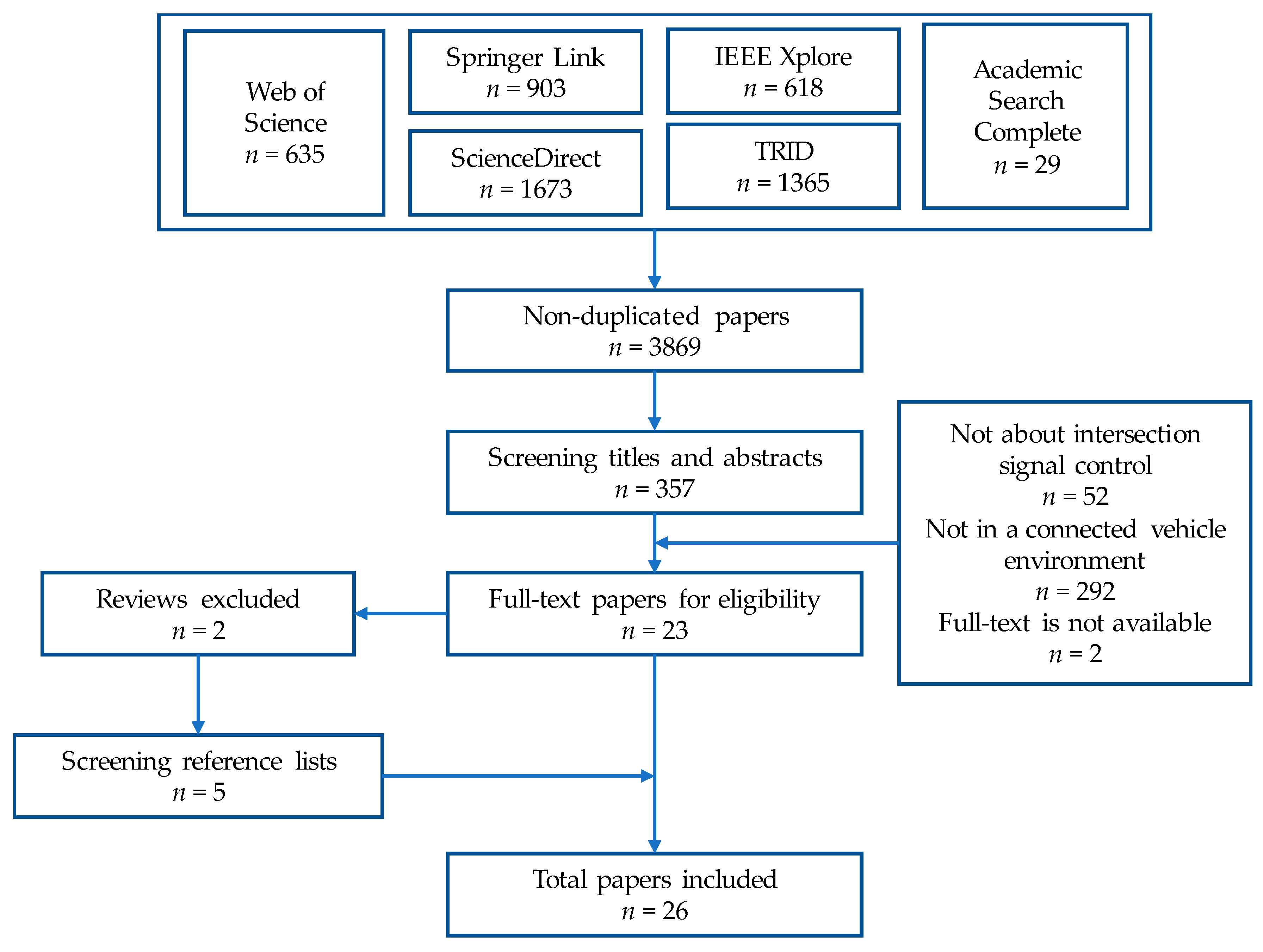
2.1. Search Strategy
2.2. Inclusion and Exclusion Criteria
2.3. Data Extraction
2.4. Quality Assessment
3. Systematic Review Process
3.1. Adaptive Signal Control Methods
3.1.1. Control Methods for Isolated Intersection
3.1.2. Control Strategies for Multiple Intersections
3.2. Estimation of Unequipped Vehicle Status
3.3. Simulation Platform
4. Quality and Reviewed Studies
5. Limitations and Strengths
6. Discussion
- The existing researches were mainly focused on the optimization-based method. This literature optimized the traffic signal control through building the optimization model of traffic dynamic and traffic signal control strategy. There are still opportunities for optimization problems that are solved. For instance, the machine learning method has been widely used in various fields of artificial intelligence. The method based on machine learning can optimize the controller’s policy through trial-and-error interactions with an environment, which is in accordance with traffic signal strategy: optimizing the signal timing through the traffic flow dynamic. However, only a few authors have employed this method to optimize the traffic signal control in a connected vehicle.
- The proposed models used to optimize the traffic signal control might be complex, and computationally expensive, sensitive to modelling errors. It is necessary to highly improve the robustness, versatility, and precision of the proposed model. Furthermore, in order to facilitate the validation of the models, many scholars employed a simplified road or intersection model for simulation. However, road and intersections are relatively more complex in reality, which poses a challenge to the adaptability of the models.
- From the review, the market penetration rate of connected vehicles was a critical parameter in determining the effectiveness of the connected vehicle related signal control algorithms. The source [46] showed that a 40% penetration rate is critical for the performance of proposed signal control method. Goodall [42] also indicated that the required minimum penetration rate for traffic signal control in a connected vehicle environment was 20–30%. It is necessary to verify the performance and adaptability of the proposed model under different penetration rates.
- In addition, although [17,24,39] proposed three various methods to estimate the status of unequipped vehicles from different aspects (queue, travel-time, location, and speed), the research on the status estimation of unequipped vehicle in a connected vehicle environment was limited. For the complexity of microscopic driving behavior model, more focus should be on the unequipped vehicle status based on the car following model.
- In terms of the applied scope of signal control methods, many proposed models can only be implemented to an isolated intersection, but it cannot achieve the coordinated control of multiple intersections or the arterial green wave control. However, the intersection is not isolated in the road network and the adjacent or multiple intersections should achieve synchronization or coordination control and, ultimately, obtain the global optimal control in the actual traffic management and control. This problem leads to an important effect on fluency for vehicles on the road network.
- The existing methods generally consider a single-modal traffic, which ignore integrating multi-modal traffic or priority for special modes, such as transit, truck, and pedestrians into the methods. This is one of the future research directions because the traffic flow system is a human-joined, changeable, and complex system. Therefore, more road traffic factors should be taken into account in the modeling process.
- The inter-vehicle or vehicle-infrastructure communication is another aspect in need of attention. In the selected papers, the method achieved information exchange between vehicle and vehicle/infrastructure by default. However, data dropout is unavoidable in the actual process of network communication and data transmission, which may greatly affect performance of traffic signal control system. Unfortunately, our review focuses more on the signal control methods.
7. Conclusions
8. Future Work
- The existing signal control models and optimization methods are based primarily on unsaturated traffic flow. With the rapid increase in motorization level, the road traffic congestion has become a common problem all over the world. Although the connected vehicle technology will reduce the traffic congestion in a certain degree, traffic congestion remains a problem in the period ahead [60]. Therefore, traffic signal control models and strategies for saturated and over-saturated intersections are one of the important directions for future research.
- Intelligent control and artificial intelligence technology (such as genetic algorithm, reinforcement learning, expert system, etc.) provide more choices for the optimization algorithm and signal control method. Compared with the existing optimization methods, the advantage of intelligent control is that its control algorithm has a strong approximation nonlinear function without relying on the precise mathematical model. This may be an effective method for a traffic signal control system that is hard to build a better mathematical model, especially in a connected vehicle environment. Although [45,61] proposed the reinforcement learning based signal control methods and [32] developed a traffic signal control based on approximate dynamic programming, research on intelligent control in a connected vehicle environment is still limited. Intelligent control will attract more researchers’ attention.
- Although connected vehicles will have rapid development in the near future, the transit, bus rapid transit, new tram, and other public transport systems will still have a critical role in the whole transport system. Public transportation development has attracted increasing attention, which is the rational trend of cities’ passenger traffic structure. Some authors [46,47] proposed multi-modal traffic signal control methods, but the research on multi-modal traffic is still limited at present. Therefore, the special vehicle priority needs to be taken into account in regard to developing the intersection control methods in a connected vehicle environment.
- In future traffic control system research, the advantages of distributed system, centralized system, and multilayer distributed system should be fully taken to account. Based on the above methods, the complex signal controls can be simplified into several logical steps to ultimately achieve global optimization. The signal control system should be more flexible, switchable, and adaptive to different control system structure, which can be applicable to different traffic scenarios.
- Autonomous vehicle technology recently has attracted more and more researchers’ attention. Autonomous vehicles (AVs) represent an emerging transportation mode for driverless transport [62,63,64,65]. Compared to the existing conventional vehicles and present connected vehicles-based control method, the traffic signal control method based on an autonomous vehicle environment will undergo a new stage of development. Some innovative ideas have been proposed based on autonomous vehicles. Some [66,67] proposed the reservation-based intersection control methods, which allocate “the right of way” of the intersection based on the series of pre-defined rules. Others [68,69] proposed the trajectory-based algorithms. Under this scenario, traffic signal controllers at intersections are removed and the intersection control is based on all vehicle trajectories through the intersection. In summary, there are two main types of algorithms used to optimize the intersection control in an autonomous vehicle environment: signal scheduling and trajectory planning. Reservation-based algorithms focus mainly on obtaining the optimal sequence of each lane by sorting the requests from upcoming AVs. Trajectory-based algorithms, however, benefit the connectivity of AVs to make preparations for the optimal departure timing and speed far ahead from the stop line.
Supplementary Materials
Supplementary File 1Conflicts of Interest
References
- Olia, A.; Abdelgawad, H.; Abdulhai, B.; Razavi, S.N. Assessing the Potential Impacts of Connected Vehicles: Mobility, Environmental, and Safety Perspectives. J. Intell. Transp. Syst. Technol. Plan. Oper. 2014, 23, ix–xii. [Google Scholar] [CrossRef]
- Li, M.; Boriboonsomsin, K.; Wu, G.; Zhang, W.B.; Barth, M. Traffic Energy and Emission Reductions at Signalized Intersections: A Study of the Benefits of Advanced Driver Information. Int. J. Intell. Transp. Syst. Res. 2009, 7, 2327–2332. [Google Scholar]
- Coelho, M.C.; Farias, T.L.; Rouphail, N.M. Impact of speed control traffic signals on pollutant emissions. Transp. Res. Part D Transp. Environ. 2005, 10, 323–340. [Google Scholar] [CrossRef]
- Denney, R.W., Jr.; Curtis, E.; Olson, P. The National Traffic Signal Report Card. ITE J. 2012, 86, 22–26. [Google Scholar]
- Fatima, K.; Fatima, K. Modal Congestion Management Strategies and the Influence on Operating Characteristics of Urban Corridor. Master Thesis, RMIT University, Melbourne, Australia, 2015. [Google Scholar]
- Auditorgeneral, V.; Office, S. Managing Traffic Congestion; Highway Traffic Control: Saugatuck, CT, USA, 2013. [Google Scholar]
- Maslekar, N.; Mouzna, J.; Boussedjra, M.; Labiod, H. CATS: An adaptive traffic signal system based on car-to-car communication. J. Netw. Comput. Appl. 2013, 36, 1308–1315. [Google Scholar] [CrossRef]
- Hoogendoorn, S.; Knoop, V. Traffic Flow Theory and Modelling; Edward Elgar Publishing Limited: Cheltenham, UK, 2012. [Google Scholar]
- Zheng, X.; Recker, W.; Chu, L. Optimization of Control Parameters for Adaptive Traffic-Actuated Signal Control. J. Intell. Transp. Syst. 2010, 14, 95–108. [Google Scholar] [CrossRef]
- Zheng, X.; Chu, L. Optimal Parameter Settings for Adaptive Traffic-Actuated Signal Control. In Proceedings of the International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008. [Google Scholar]
- Sims, A.G.; Dobinson, K.W. The Sydney coordinated adaptive traffic (SCAT) system philosophy and benefits. IEEE Trans. Veh. Technol. 1980, 29, 130–137. [Google Scholar] [CrossRef]
- Gartner, N.H. OPAC: A Demand Responsive Strategy for Traffic Signal Control; Transportation Research Record: Washington, DC, USA, 1983; No. 906; pp. 75–81. [Google Scholar]
- Bing, B.; Carter, A. SCOOT: The World’s Foremost Adaptive Traffic Control System; Traffic Technology International’95; UK and International Press: Surrey, UK, 1995.
- Mirchandani, P.; Head, L. A real-time traffic signal control system: Architecture, algorithms, and analysis. Transp. Res. Part C Emerg. Technol. 2001, 9, 415–432. [Google Scholar] [CrossRef]
- Henry, J.J.; Farges, J.L.; Tuffal, J. The Prodyn Real Time Traffic Algorithm. Control Transp. Syst. 1984, 16, 305–310. [Google Scholar]
- Brilon, W.; Wietholt, T. Experiences with Adaptive Signal Control in Germany. Transp. Res. Rec. J. Transp. Res. Board 2013, 2356, 9–16. [Google Scholar] [CrossRef]
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Huang, Q.; Miller, R. Reliable Wireless Traffic Signal Protocols for Smart Intersections. In Proceedings of the 14th ITS America Annual Meeting and Exposition, San Antonio, TX, USA, 26–28 April 2004. [Google Scholar]
- Wu, J.; Abbas-Turki, A.; Correia, A.; El Moudni, A. Discrete Intersection Signal Control. In Proceedings of the IEEE International Conference on Service Operations and Logistics, and Informatics, Philadelphia, PA, USA, 27–29 August 2007. [Google Scholar]
- Cheng, J.; Wu, W.; Cao, J.; Li, K. Fuzzy Group Based Intersection Control via Vehicular Networks for Smart Transportations. IEEE Trans. Ind. Inform. 2017, 13, 751–758. [Google Scholar] [CrossRef]
- Ahmane, M.; Abbas-Turki, A.; Perronnet, F.; Wu, J.; El Moudni, A.; Buisson, J.; Zeo, R. Modeling and controlling an isolated urban intersection based on cooperative vehicles. Tramsp. Res. Part C Emerg. Technol. 2013, 28, 44–62. [Google Scholar] [CrossRef]
- Tiaprasert, K.; Zhang, Y.; Wang, X.B.; Zeng, X. Queue Length Estimation Using Connected Vehicle Technology for Adaptive Signal Control. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2129–2140. [Google Scholar] [CrossRef]
- Guler, S.I.; Menendez, M.; Meier, L. Using connected vehicle technology to improve the efficiency of intersections. Transp. Res. Part C Emerg. Technol. 2014, 46, 121–131. [Google Scholar] [CrossRef]
- Lee, J.; Park, B.; Yun, I. Cumulative Travel-Time Responsive Real-Time Intersection Control Algorithm in the Connected Vehicle Environment. J. Transp. Eng. 2013, 139, 1020–1029. [Google Scholar] [CrossRef]
- Vrabel, M. Preferred Reporting Items for Systematic Reviews and Meta-Analyses. Oncol. Nurs. Forum 2015, 42, 552. [Google Scholar] [CrossRef] [PubMed]
- Peirce, S.; Mauri, R. Vehicle-Infrastructure Integration (VII) Initiative Benefit-Cost Analysis: Pre-Testing Estimates; Draft Report; Intelligent Transportation Systems Joint Program Office: Washington, DC, USA, 2007.
- Pandit, K.; Ghosal, D.; Zhang, H.M.; Chuah, C.N. Adaptive Traffic Signal Control with Vehicular Ad hoc Networks. IEEE Trans. Veh. Technol. 2013, 62, 1459–1471. [Google Scholar] [CrossRef]
- Gradinescu, V.; Gorgorin, C.; Diaconescu, R.; Cristea, V.; Iftode, L. Adaptive Traffic Lights Using Car-to-Car Communication. In Proceedings of the IEEE Vehicular Technology Conference—VTC 2007-Spring, Dublin, Ireland, 22–25 April 2007. [Google Scholar]
- Webster, F.V.; Cobbe, B.M. Traffic Signals; Road Research Technical Paper No. 56; Her Majesty’s Stationery Office: London, UK, 1966; Volume 4, pp. 206–207. [Google Scholar]
- Howard, R.A. Dynamic Programming. Manag. Sci. 1966, 12, 317–348. [Google Scholar] [CrossRef]
- Werbos, P.J. Approximate dynamic programming for real-time control and neural modeling. In Handbook of Intelligent Control: Neural Fuzzy & Adaptive Approaches; Van Nostrand Reinhold: New York, NY, USA, 1992. [Google Scholar]
- Cai, C.; Wang, Y.; Geers, G. Vehicle-to-infrastructure communication-based adaptive traffic signal control. IET Intell. Transp. Syst. 2013, 7, 351–360. [Google Scholar] [CrossRef]
- Chang, H.J.; Park, G.T. A study on traffic signal control at signalized intersections in vehicular ad hoc networks. Ad Hoc Netw. 2013, 11, 2115–2124. [Google Scholar] [CrossRef]
- Younes, M.B.; Boukerche, A. Intelligent Traffic Light Controlling Algorithms Using Vehicular Networks. IEEE Trans. Veh. Technol. 2016, 65, 5887–5899. [Google Scholar] [CrossRef]
- Nafi, N.S.; Khan, J.Y. A VANET based Intelligent Road Traffic Signalling System. In Proceedings of the Telecommunication Networks and Applications Conference, Brisbane, QLD, Australia, 7–9 November 2012. [Google Scholar]
- Jennings, N.R.; Sycara, K.; Wooldridge, M. A Roadmap of Agent Research and Development. Auton. Agents Multi-Agent Syst. 1998, 1, 7–38. [Google Scholar] [CrossRef]
- Kari, D.; Wu, G.; Barth, M.J. Development of an agent-based online adaptive signal control strategy using connected vehicle technology. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014. [Google Scholar]
- Chou, L.D.; Deng, B.T.; Li, D.C.; Kuo, K.W. A passenger-based adaptive traffic signal control mechanism in Intelligent Transportation Systems. In Proceedings of the International Conference on ITS Telecommunications, Taipei, Taiwan, 5–8 November 2012. [Google Scholar]
- Priemer, C.; Friedrich, B. A decentralized adaptive traffic signal control using V2I communication data. In Proceedings of the International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009. [Google Scholar]
- Priemer, C.; Friedrich, B. A method for tailback approximation via C2I-data based on partial penetration. In Proceedings of the 15th World Congress on Intelligent Transport Systems and ITS America’s 2008 Annual Meeting, New York, NY, USA, 16–20 November 2008. [Google Scholar]
- Wallace, C.E.; Courage, K.G.; Reaves, D.P.; Schoene, G.W.; Euler, G.W. TRANSYT-7F User’s Manual; Federal Highway Administration: Washington, DC, USA, 1984.
- Goodall, N.J.; Smith, B.L.; Park, B. Traffic Signal Control with Connected Vehicles. Transp. Res. Rec. J. Transp. Res. Board 2013, 2381, 65–72. [Google Scholar] [CrossRef]
- Shaghaghi, E.; Jabbarpour, M.R.; Noor, R.M.; Yeo, H.; Jung, J.J. Adaptive green traffic signal controlling using vehicular communication. Front. Inf. Technol. Electr. Eng. 2017, 18, 373–393. [Google Scholar] [CrossRef]
- Islam, S.M.A.B.; Hajbabaie, A. Distributed coordination and optimization for signal timing in connected transportation networks. Transp. Res. Part C Emerg. Technol. 2017, 80, 272–285. [Google Scholar] [CrossRef]
- Liu, W.; Qin, G.; He, Y.; Jiang, F. Distributed Cooperative Reinforcement Learning-Based Traffic Signal Control that Integrates V2X Networks’ Dynamic Clustering. IEEE Trans. Veh. Technol. 2017. [Google Scholar] [CrossRef]
- He, Q.; Head, K.L.; Ding, J. PAMSCOD: Platoon-based Arterial Multi-modal Signal Control with Online Data. Transp. Res. Part C 2012, 20, 164–184. [Google Scholar] [CrossRef]
- He, Q.; Head, K.L.; Ding, J. Multi-modal traffic signal control with priority, signal actuation and coordination. Transp. Res. Part C Emerg. Technol. 2014, 46, 65–82. [Google Scholar] [CrossRef]
- Hu, J.; Park, B.B.; Lee, Y.J. Coordinated transit signal priority supporting transit progression under Connected Vehicle Technology. Transp. Res. Part C 2015, 55, 393–408. [Google Scholar] [CrossRef]
- Ezawa, H.; Mukai, N. Adaptive Traffic Signal Control Based on Vehicle Route Sharing by Wireless Communication; Springer: Berlin/Heidelberg, Germany, 2010; pp. 280–289. [Google Scholar]
- Xiang, J.; Chen, Z. An adaptive traffic signal coordination optimization method based on vehicle-to-infrastructure communication. Cluster Comput. 2016, 19, 1–12. [Google Scholar] [CrossRef]
- Tomescu, O.; Moise, I.M.; Stanciu, A.E.; Batros, I. Adaptive Traffic Light Control System Using Ad Hoc Vehicular Communications Network. UPB Sci. Bull. 2012, 74, 67–78. [Google Scholar]
- Hobeika, A.G.; Kim, T. Assessment of certain applications of Vehicle-to-Vehicle communication in an urban network. Wit Trans. Built Environ. 2014, 138, 405–417. [Google Scholar]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis. IEEE Trans. Mob. Comput. 2010, 10, 3–15. [Google Scholar] [CrossRef]
- PTV Group. VISSIM 5.40: User Manual; PTV Group: Karlsruhe, Germany, 2011. [Google Scholar]
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent Development and Applications of SUMO—Simulation of Urban MObility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Wang, S.Y.; Lin, C.C. NCTUns 5.0: A Network Simulator for IEEE 802.11(p) and 1609 Wireless Vehicular Network Researches. In Proceedings of the Vehicular Technology Conference—VTC 2008-Fall, Calgary, AB, Canada, 21–24 September 2008. [Google Scholar]
- Manual AIMSUN User. 6.1: Microsimulator and Mesosimulator in AIMSUN; Transport Simulation Systems: Barcelona, Spain, 2009. [Google Scholar]
- Wiering, M.; Vreeken, J.; Van Veenen, J.; Koopman, A. Simulation and optimization of traffic in a city. In Proceedings of the Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004. [Google Scholar]
- Guide, MATLAB User. The Mathworks; MathWorks Inc.: Natick, MA, USA, 1998. [Google Scholar]
- Jabbarpour, M.R.; Zarrabi, H.; Khokhar, R.H.; Shamshirband, S.; Choo, K.K.R. Applications of computational intelligence in vehicle traffic congestion problem: A survey. Soft Comput. 2017. [Google Scholar] [CrossRef]
- Yang, K. A Reinforcement Learning Based Traffic Signal Control Algorithm in a Connected Vehicle Environment. In Proceedings of the 17th Swiss Transport Research Conference (STRC 2017), Ascona, Switzerland, 17–19 May 2017. [Google Scholar]
- Fagnant, D.J.; Kockelman, K.M. Dynamic Ride-Sharing and Optimal Fleet Sizing for a System of Shared Autonomous Vehicles. In Proceedings of the Transportation Research Board Annual Meeting, Washington, DC, USA, 11–15 January 2015. [Google Scholar]
- Fagnant, D.J.; Kockelman, K.M. Dynamic ride-sharing and fleet sizing for a system of shared autonomous vehicles in Austin, Texas. Transportation 2016. [Google Scholar] [CrossRef]
- Truong, L.T.; De Gruyter, C.; Currie, G.; Delbosc, A. Estimating the trip generation impacts of autonomous vehicles on car travel in Victoria, Australia. Transportation 2017, 1–14. [Google Scholar] [CrossRef]
- Woodard, M.; Sedigh, S. Modeling of Autonomous Vehicle Operation in Intelligent Transportation Systems. In Proceedings of the International Workshop on Software Engineering for Resilient Systems, Kiev, Ukraine, 3–4 October 2013. [Google Scholar]
- Dresner, K.; Stone, P. Multiagent Traffic Management: A Reservation-Based Intersection Control Mechanism. In Proceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems, Utrecht, The Netherlands, 25–29 July 2005. [Google Scholar]
- Hausknecht, M.; Au, T.C.; Stone, P. Autonomous Intersection Management: Multi-intersection optimization. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar]
- Lee, J.; Park, B. Development and Evaluation of a Cooperative Vehicle Intersection Control Algorithm under the Connected Vehicles Environment. IEEE Trans. Intell. Transp. Syst. 2012, 13, 81–90. [Google Scholar] [CrossRef]
- Li, Z.; Elefteriadou, L.; Ranka, S. Signal control optimization for automated vehicles at isolated signalized intersections. Trans. Res. Part C 2014, 49, 1–18. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Criteria | Description | Score |
|---|---|---|
| Assessing methodology quality | 0–3 | |
| Estimation of the equipped vehicle status | Included | 1 |
| Not Included | 0 | |
| Number of the objective function | More than 2 | 1 |
| Less than 2 | 0 | |
| Applied range of the method | For an isolated intersection | 0 |
| For coordinated intersections | 1 | |
| Assessing simulation and simulation result quality | 2–7 | |
| Simulation testing | Testing | 2 |
| Not testing | 1 | |
| Simulation data source | Field | 1 |
| Hypothetical | 0 | |
| Simulation scenario | Field | 1 |
| Hypothetical | 0 | |
| Penetration rate of CV | 100% | 1 |
| Not 100% | 2 | |
| Comparison of simulation results | Included | 1 |
| Not Included | 0 | |
| Leader Author (year) | Country | Journal | Method | Objective Functions | Penetration Rate | Data Resource | Simulation Scenario | Simulation Platform |
|---|---|---|---|---|---|---|---|---|
| Islam S.M.A.B.A. 2017 | USA | Transportation Research Part C: Emerging Technologies | a Distributed-Coordinated methodology | 1. the queue length 2. the throughput | - | Hypothetical | Hypothetical | VISSIM |
| Liu W. 2017 | China | IEEE Transactions on Vehicular Technology | a reinforcement learning-based traffic control that integrates V2X networks’ dynamic clustering algorithm. | 1. the throughput 2. the average waiting time | - | - | Field | SUMO NS-3 |
| Cheng J. 2017 | China | IEEE Transactions on Industrial Informatics | a fuzzy group-based intersection control | the average waiting time | - | Hypothetical | Hypothetical | NS-3 |
| Shaghaghi E. 2017 | Malaysia | Frontiers of Information Technology & Electronic Engineering | an adaptive green traffic signal controlling using vehicular communications (AGTSC-VC) | 1. the vehicle waiting time 2. the pollutant emission | - | - | Field | Veins |
| Younes M.B. 2016 | Canada | IEEE Transactions on Vehicular Technology | an intelligent traffic light controlling algorithm and an arterial traffic light controlling algorithm | 1. the delay 2. the throughput | - | Hypothetical | Hypothetical | SUMO NS-2 |
| Xiang J. 2016 | China | Cluster Computing | a multi-agent based control method | the total travel time | - | Field | Field | VISSIM |
| Hu J. 2015 | USA | Transportation Research Part C: Emerging Technologies | a person-delay-based optimization method for TSP | the delay | - | Field | Field | VISSIM-COM |
| Feng Y. 2015 | USA | Transportation Research Part C: Emerging Technologies | a real-time adaptive phase allocation algorithm | 1. the total vehicle delay 2. the queue length | 100%, 75%, 50%, 25% | Field | Field | VISSIM-COM |
| Tiaprasert K. 2015 | USA | IEEE Transactions on Intelligent Transportation Systems | a queue length estimation based adaptive signal control | the queue length | 80%, 50%, 10% | - | - | VISSIM |
| Guler S.I. 2014 | Switzerland | Transportation Research Part C: Emerging Technologies | an intersection traffic control algorithm | 1. the total delay 2. the total number of stop | 100–0% | Hypothetical | Hypothetical | MATLAB |
| He Q. 2014 | USA | Transportation Research Part C: Emerging Technologies | a multi-modal traffic signal control | the delay | - | Field | Field | VISSIM-COM |
| Kari D. 2014 | USA | IEEE on Intelligent Transportation Systems Conference | an agent-based online adaptive signal control (ASC) strategy | 1. the travel delay 2. the fuel consumption | - | - | - | SUMO |
| Lee J. 2013 | USA | Journal of Transportation Engineering, | a cumulative travel-time responsive (CTR) field-time intersection control algorithm | 1. the total delay time 2. the average speed | 100%, 90%, 70%, 50%, 30%, 10% | Hypothetical | Hypothetical | VISSIM-COM |
| Goodall N. 2013. | USA | Transportation Research Record Journal of the Transportation Research Board | a predictive microscopic simulation algorithm (PMSA) | the delay or a combination of delay, stops and decelerations | 100%, 50%, 25%, 10% | Field | Field | VISSIM-COM |
| Pandit K. 2013 | USA | IEEE Transactions on Vehicular Technology | the oldest arrival first (OAF) algorithm | the average delay per vehicle | 100%, 90%, 70%, 50%, 30% | - | - | SUMO OMNET++ (Veins) |
| Maslekar N. 2013 | France | Journal of Network & Computer Applications | an adaptive traffic signal system based on car-to-car communication | 1. the average waiting time 2. the queue length | - | - | Field | NCTUns |
| Cai C. 2013 | Australia | IET Intelligent Transport Systems | a vehicle-to-infrastructure communication-based adaptive control’ (VICAC) method | the travel time | - | Hypothetical | Hypothetical | Commuter |
| Ahmane M. 2013 | France | Transportation Research Part C: Emerging Technologies | a model based on Timed Petri Nets with Multipliers | the queue length | - | Field | Field | Video 2 |
| Chang H.J. 2013 | Republic of Korea | Ad Hoc Networks | a method of queue length estimation | 1. the average junction waiting time 2. the total queue length | - | Hypothetical | Hypothetical | GLD |
| Nafi N.S. 2012 | Australia | Telecommunication Networks and Applications Conference | a new Intelligent Road Traffic Signaling System (IRTSS) system | the average waiting time | - | Hypothetical | Hypothetical | OPNET Modeler |
| He Q. 2012 | USA | Transportation Research Part C: Emerging Technologies | a unified platoon-based mathematical formulation | 1. the throughput 2. the average delay | 100%, 80%, 60%, 40%, 20% | Field | Field | VISSIM-COM |
| Chou L. 2012 | Taiwan | 12th International Conference on ITS Telecommunications | a passenger-based traffic signal mechanism | 1. the vehicle delay 2. the stop times 3. the passenger delay | - | Hypothetical | Hypothetical | NCTUns |
| Tomescu O. 2012 | Romania | U.P.B. Sci. Bull | a new adaptive traffic light system and a new traffic light green-wave control algorithm | 1. the stop times 2. the delay | - | Hypothetical | Hypothetical | MATLAB |
| Ezawa H. 2010 | Japan | Springer Berlin Heidelberg | a new control system for traffic signals by vehicle route sharing | the average delay time | - | Hypothetical | Field | Artisoc |
| Priemer C. 2009 | Germany | Intelligent Transportation Systems | a decentralized adaptive traffic signal control algorithm | the total queue length | 100%, 50%, 33%, 25%, 20%, 17%, 14%, 12%, 10%. | Field | Field | AIMSUN NG |
| Gradinescu V. 2007 | Romania | IEEE Vehicular Technology Conference-vtc-spring | an adaptive traffic light system | the total average delay | - | Field | Field | Ns-2 and Jist/SWANS VISSIM |
| Leader Author (year) | Method/Algorithm | Consideration | Traffic Signal Controller Mechanisms | Objective Functions | |
|---|---|---|---|---|---|
| Traffic Data Gathering | Schedule Technique | ||||
| Islam S.M.A.B.A, 2017 | A Distributed-Coordinated methodology | 2 and 9 intersections | Connected vehicle | Distributed coordinated signal timing | Minimizing queue length and maximizing throughput and reducing travel time |
| Liu W. 2017 | A reinforcement learning traffic control scheme | 3 intersections | V2X networks | Cooperative RL-based signal control algorithm | Improving traffic throughput and reducing average waiting time |
| Cheng J. 2017 | Fuzzy group-based intersection control | Isolated intersection | Vehicular Ad Hoc Networks | Vehicle grouping based traffic control | Reducing the waiting time |
| Shaghaghi E. 2017 | AGTSC-VC | 36 intersections | Vehicular Ad Hoc Networks | Density-based and priority-based traffic signal timing | Decreasing the vehicle waiting time and pollutant emission |
| Younes M B. 2016 | ITLC algorithm/ATL controlling algorithm | Isolated intersection | Vehicular Ad Hoc Networks | An intelligent traffic light controlling algorithm | Minimizing the delay and improving the throughput |
| Xiang J. 2016 | Multi-agent based control method | 22 intersections | Vehicle-to-infrastructure communication | Traffic signal co-learning optimization algorithm | Reducing average travel time, the average delay and the average queue length |
| Hu J. 2015 | A person-delay-based optimization method for TSP | 2 consecutive intersections | Connected vehicle | TSPCV-C | Reducing bus delay |
| Feng Y. 2015 | Phase allocation algorithm | Isolated intersection | Connected vehicle | DP based control algorithm | Minimizing total vehicle delay or queue length |
| Tiaprasert K. 2015 | Queue-based ASC | Isolated intersection | Connected vehicle | Queue based traffic control | Minimizing the queue length |
| Guler S.I. 2014 | An intersection traffic control algorithm | Isolated intersection | Connected vehicle | Discharging sequence based traffic control | Minimizing total delay and total number of stops |
| He Q. 2014 | Multi-modal traffic signal control | 2 intersections | Connected vehicle | Mixed integer linear program | Reducing the delay |
| Kari D. 2014 | Agent-based online ASC | Isolated intersection | Connected vehicle | Flexible traffic light state machine | Reducing the travel delay and the fuel consumption |
| Lee J. 2013 | CTR | Isolated intersection | Connected vehicle | Travel-time responsive control algorithm | Improving the total delay time and the average speed |
| Goodall N. 2013. | PMSA | 4 intersections | Connected vehicle | Predictive microscopic simulation algorithm | Minimizing the delay |
| Pandit K. 2013 | OAF | Isolated intersection | Vehicular Ad Hoc Networks | On-line Scheduling Algorithm | Minimizing the delay |
| Maslekar N. 2013 | CATS | 7 intersections | Clustering Vehicular Ad Hoc Networks | Density-based adaptive traffic signal timing | Reducing the waiting time and queue length |
| Cai C. 2013 | VICAC | Isolated intersection | Vehicle-to-infrastructure Communication | Travel-time based control algorithm | Reducing the travel time |
| Ahmane M. 2013 | A model based on TPNM | Isolated intersection | Cooperative vehicle | TPNM based traffic control | Minimizing the queue length |
| Chang H.J. 2013 | A method of queue length estimation | Isolated intersection | Vehicular Ad Hoc Networks | A dual ring configuration control | Reducing average junction waiting time and queue length |
| Nafi N S. 2012 | IRTSS | Isolated intersection | Vehicular Ad Hoc Networks | An adaptive IRTSS | Reducing the average waiting time |
| He Q. 2012 | PAMSCOD | 8 intersections | Probe data | Mixed integer linear program | Improving the throughput and reducing the average delay |
| Chou L. 2012 | PATSC | Isolated intersection | Vehicle-to-infrastructure Communication | Passenger-based adaptive traffic signal control | Reducing vehicle delay, stop times and passenger delay |
| Tomescu O. 2012 | A new adaptive TLC | 3 adjacent intersections | Vehicular Ad Hoc Networks | Traffic signal green-wave strategy | Reducing the stop number and delay |
| Ezawa H. 2010 | Vehicle route sharing based ASC | 62 intersections | Wireless Communication | ETC based control algorithm | Minimizing the average delay |
| Priemer C. 2009 | Decentralized adaptive traffic signal control | Signalized and unsignalized intersections | Vehicle-to-infrastructure Communication | DP&CE based optimization algorithm | Reducing the total queue length |
| Gradinescu V. 2007 | Adaptive Traffic Light | Isolated Intersection | Vehicular Ad Hoc Networks | Modified Webster’s formula | Minimizing the average delay |
| Simulation Platform | Country | Introduction | Property | Frequency |
|---|---|---|---|---|
| Veins [53] | Germany | Veins is a framework for running vehicular network simulations. It is based on two well-established simulators: OMNeT++ and SUMO. | Open source | 2 |
| VISSIM [54] | Germany | VISSIM is a microscopic, time step and behavior based simulation model developed to model urban traffic and public transit operations. It is possible to automate certain tasks in VISSIM by executing COM (component object model) commands from an external program. | Commercial | 9 |
| SUMO [55] | Germany | “Simulation of Urban MObility” (SUMO) is a microscopic and continuous road traffic simulation package designed to handle large road networks. | Open source | 3 |
| NCTUns [56] | Taiwan | NCTUns is a network simulation and traffic simulation software, NCTUns has more realistic and credible experimental results, and can directly use the existing network software to reduce the workload of the design of the experimental environment. | Open source | 2 |
| AIMSUN NG [57] | Spain | Aimsun is traffic modelling software that allows you to model anything from a single bus lane to an entire region. It is used to improve road infrastructure, reduce emissions, cut congestion and design urban environments for vehicles and pedestrians. | Commercial | 1 |
| GLD simulator [58] | Netherlands | Green Light District (GLD) simulator is a Java-based traffic simulator that enables road/intersection design and allows the expansion of source codes. | Open source | 1 |
| MATLAB [59] | USA | MATLAB is a high-level technical computing language and interactive environment for algorithm development, data visualization, data analysis and numerical computation, including MATLAB and Simulink. | Commercial | 2 |
| Criteria | Description | Score | N of Studies | Percentage |
|---|---|---|---|---|
| Assessing methodology quality | ||||
| Estimation of the equipped vehicle status | Included | 1 | 3 | 11.54% |
| Not Included | 0 | 23 | 88.46% | |
| Number of the objective function | More than 2 | 1 | 14 | 53.85% |
| Less than 2 | 0 | 12 | 46.15% | |
| Applied range of the method | For coordinated intersection | 1 | 12 | 46.15% |
| For an isolated intersection | 0 | 14 | 53.85% | |
| Assessing simulation and simulation result quality | ||||
| Simulation testing | Testing | 2 | 26 | 100.00% |
| Not testing | 1 | 0 | 0.00% | |
| Simulation data source | Field | 1 | 9 | 45.00% |
| Hypothetical | 0 | 11 | 55.00% | |
| Simulation scenario | Field | 1 | 13 | 56.52% |
| Hypothetical | 0 | 10 | 43.47% | |
| Penetration rate of CV | Not 100% | 2 | 8 | 30.77% |
| 100% | 1 | 18 | 69.23% | |
| Comparison of simulation results | Included | 1 | 25 | 96.15% |
| Not Included | 0 | 1 | 3.85% | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, P.; Huang, H.; Chen, L. An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review. Information 2017, 8, 101. https://doi.org/10.3390/info8030101
Jing P, Huang H, Chen L. An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review. Information. 2017; 8(3):101. https://doi.org/10.3390/info8030101
Chicago/Turabian StyleJing, Peng, Hao Huang, and Long Chen. 2017. "An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review" Information 8, no. 3: 101. https://doi.org/10.3390/info8030101
APA StyleJing, P., Huang, H., & Chen, L. (2017). An Adaptive Traffic Signal Control in a Connected Vehicle Environment: A Systematic Review. Information, 8(3), 101. https://doi.org/10.3390/info8030101