
A Novel Global Path Planning Method for Mobile Robots Based on Teaching-Learning-Based Optimization

Abstract
:1. Introduction
2. NIWTLBO Algorithm
2.1. Initialization
2.2. Teacher and Learner Phase
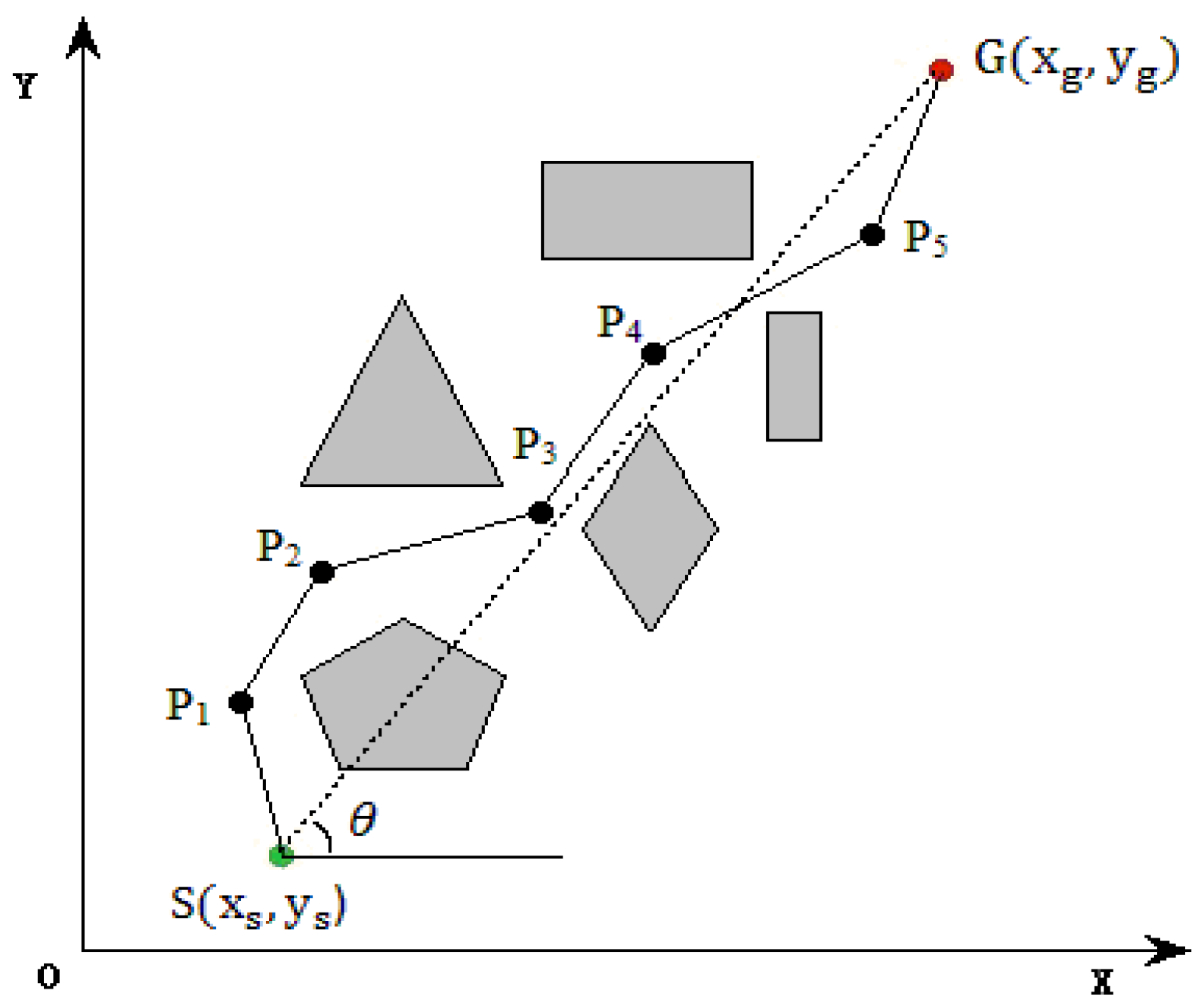
3. Mobile Robot Path Modeling
4. Implementation of Path Planning Based on NIWTLBO Algorithm
4.1. Initialization
4.2. Individual Fitness Function
4.3. Obstacle Constraints
4.4. The Step of NIWTLBO Algorithm
- Step1:
- Initialize NP (number of learners), D (number of subject dimensions) and MAXITER (number of generations).
- Step2:
- Initialize the learners X according to Equation (1) and ensure the marks of learners are limited in the range of the x-coordinate of the map, then according to Equation (9), calculate the initial value of the fitness function f(x) (i.e., the length of a path) to evaluate all learners X.
- Step3:
- Calculate the nonlinear inertia weighted parameter w and the dynamic inertia weighted factor according to Equations (4) and (5), respectively.
- Step4:
- Choose the best learner to be the teacher of the current generation, and calculate the mean result of each subject.
- Step5:
- Learners are learning from the teacher. Calculate the new marks of learners according to Equation (2) and ensure the marks are limited in the range of the x-coordinate of the map, evaluate all learners by calculating the fitness value of individuals (i.e., the length of a path). During the teacher phase, update all individuals according to Equation (7), and pass all accepted individuals to the learner phase.
- Step6:
- Execute the learner phase. Re-calculate the new marks of learners according to Equation (6) and the fitness value of individuals (i.e., the length of a path), update all individuals according to Equation (7) in the same way. The accepted individuals are passed to the next iteration.
- Step7:
- Check the repeated solutions. If there are repeated solutions, generate new individuals for the repeated solutions by the mutation operator.
- Step8:
- If the stopping condition is satisfied, terminate the algorithm and output the best solution. Otherwise, go to Step 3.
5. Experimental Results and Analysis
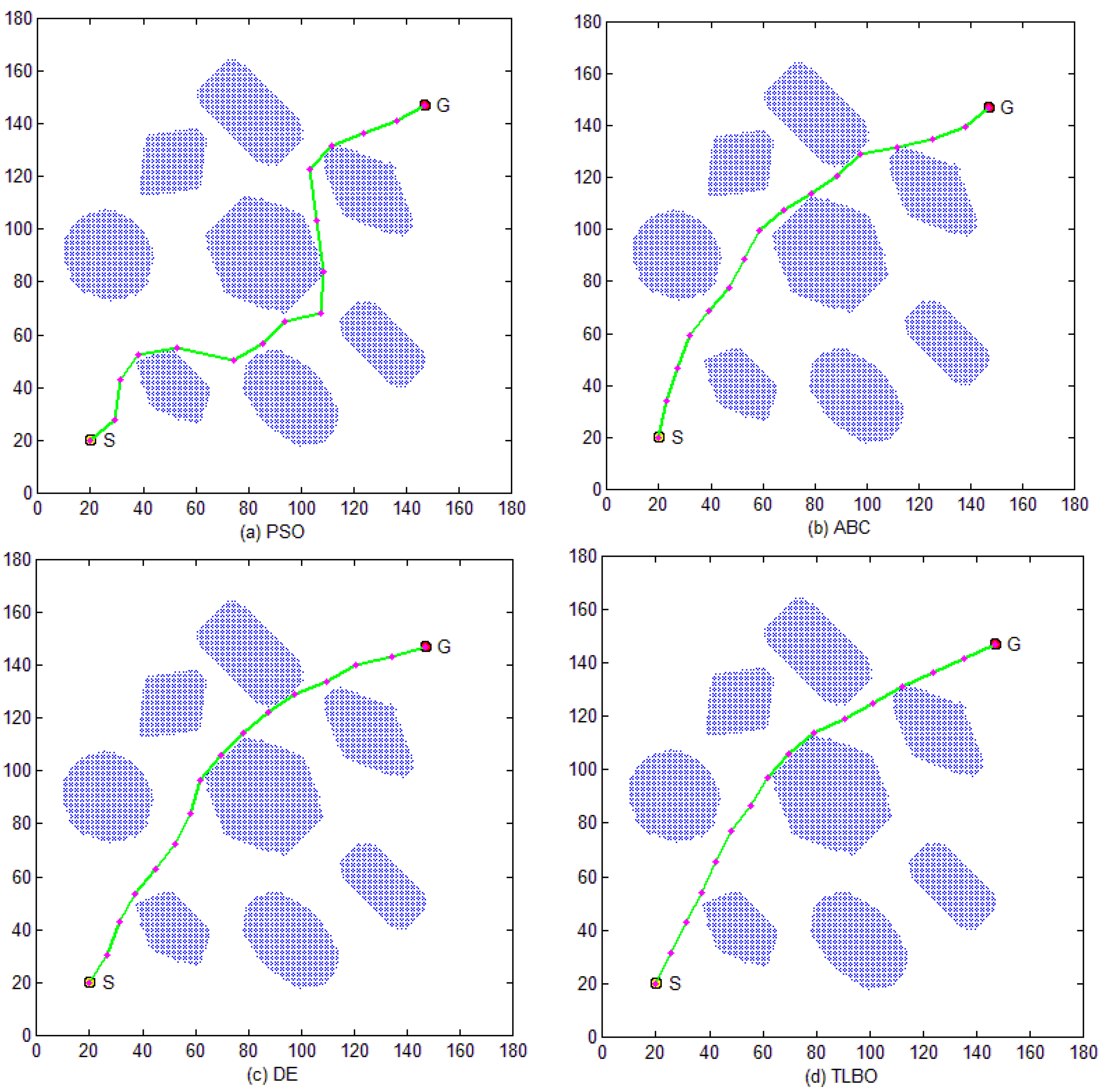
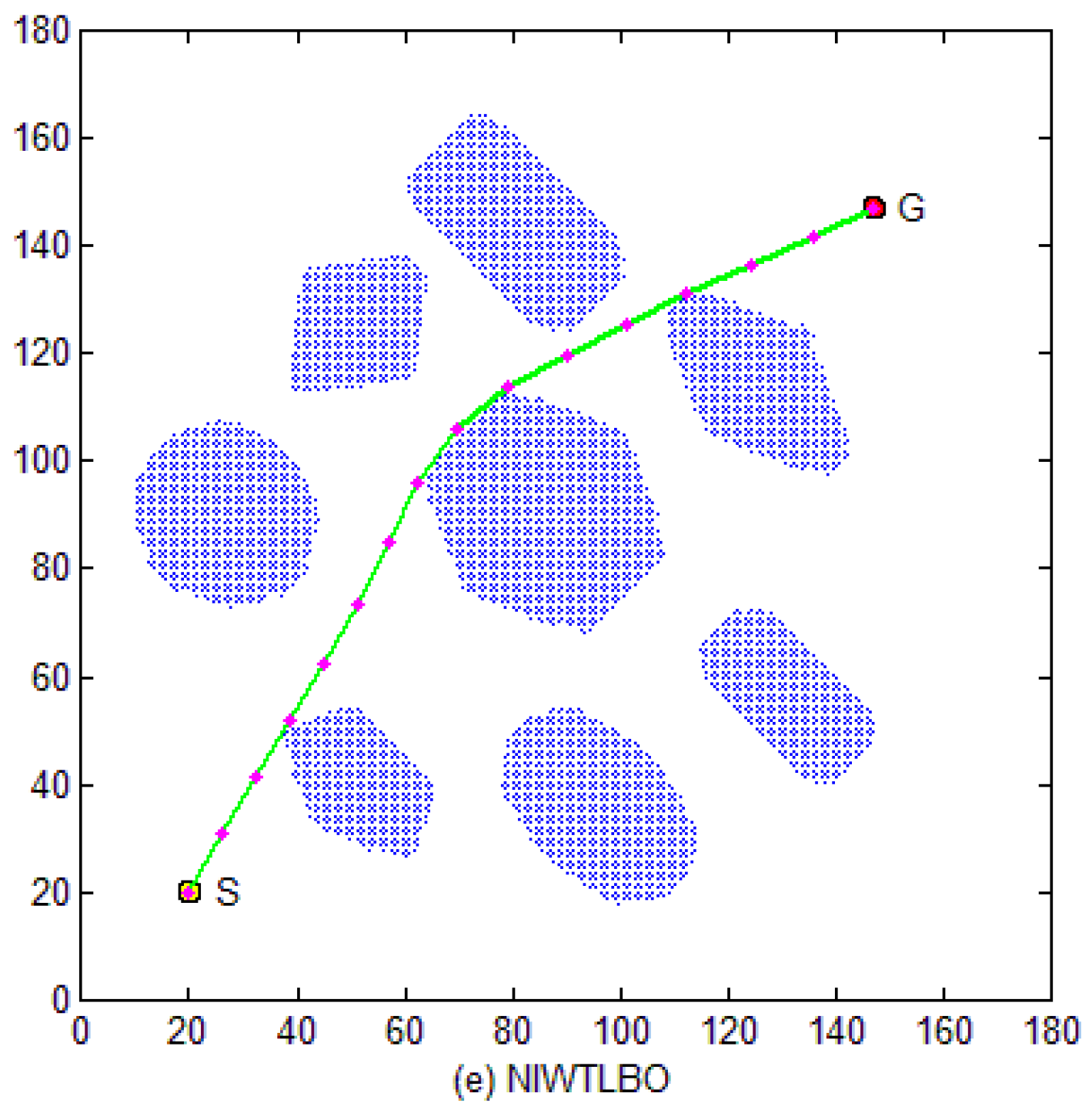
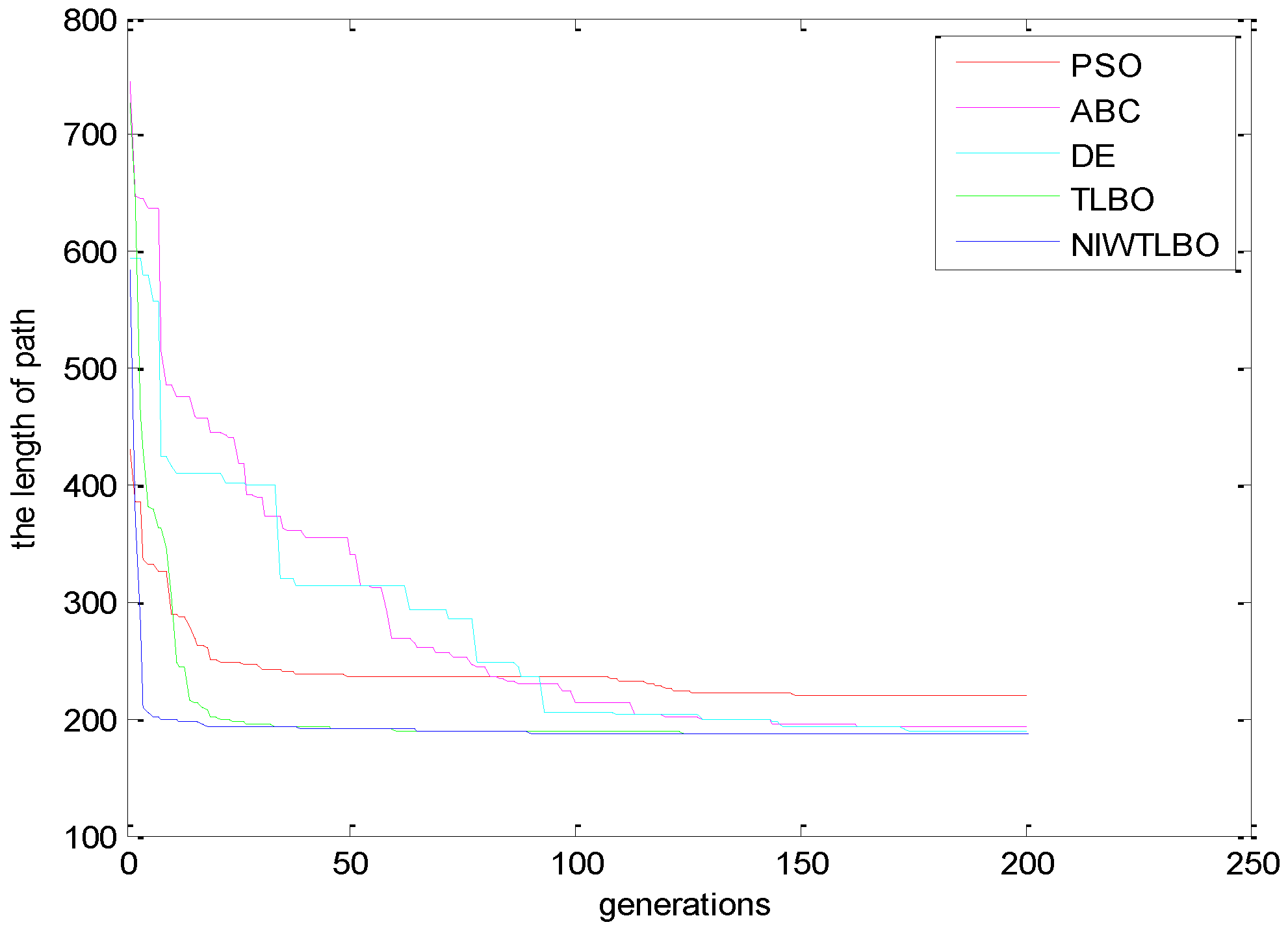
5.1. NIWTLBO vs. PSO, ABC, DE and TLBO
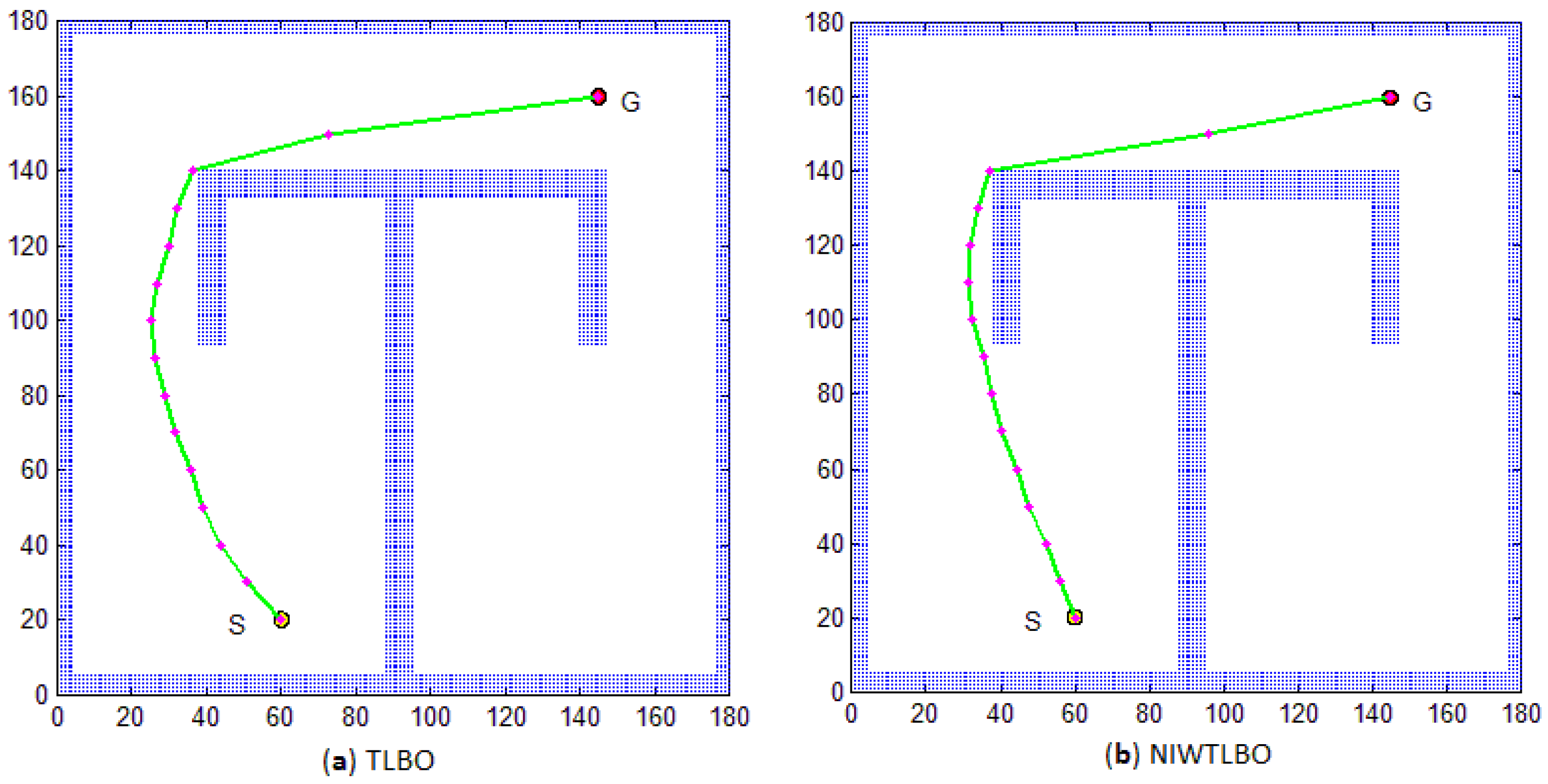
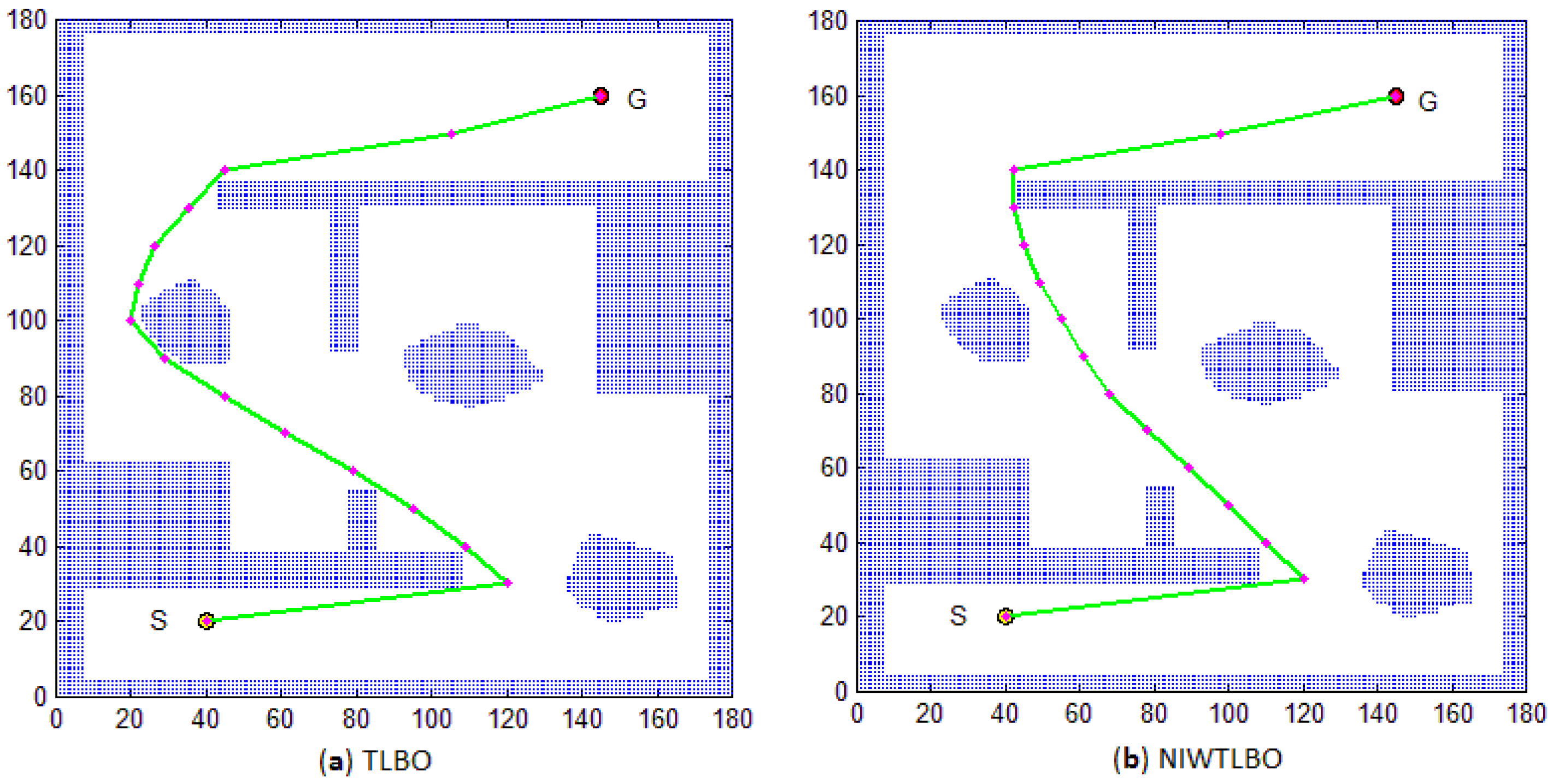
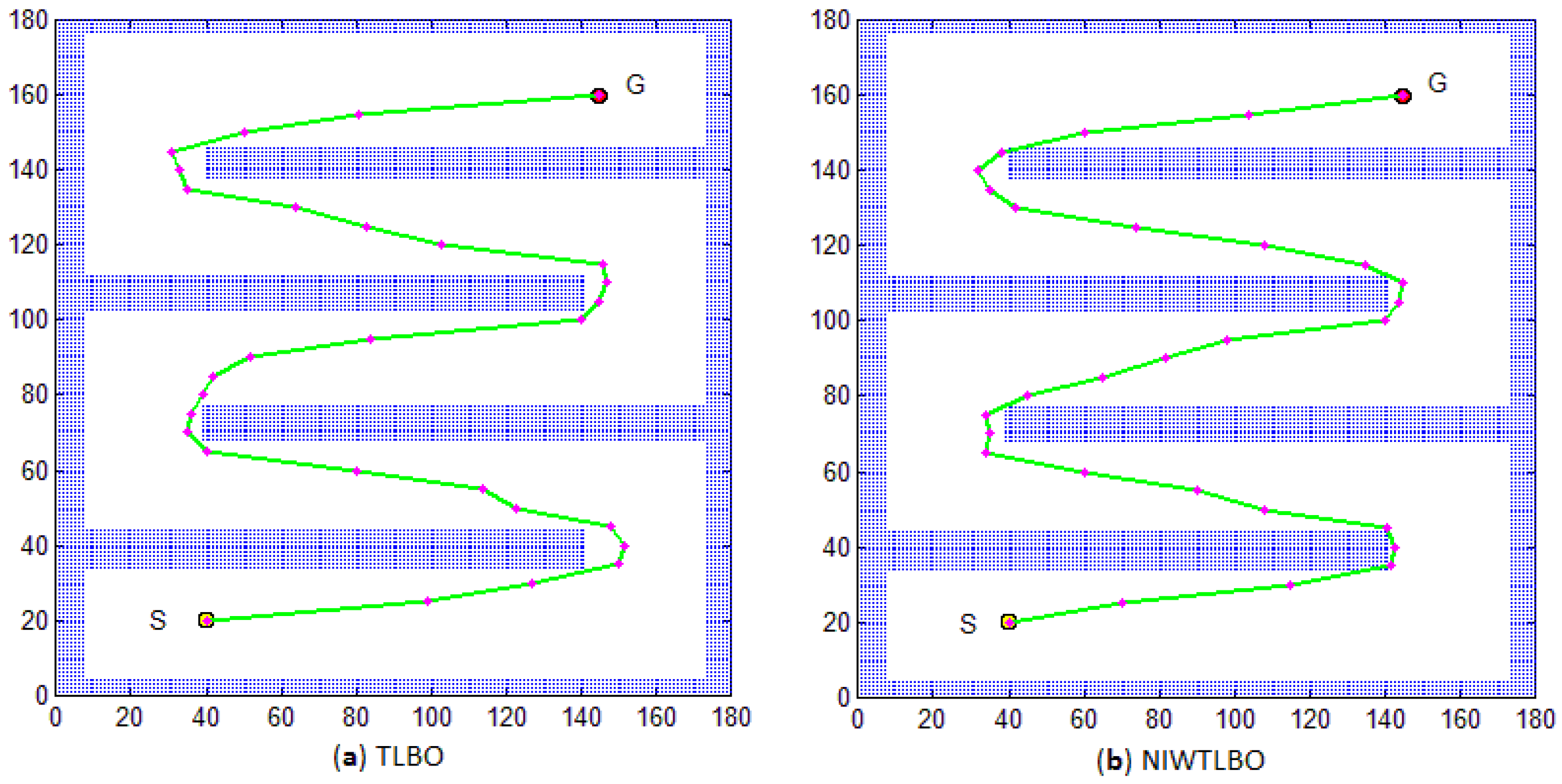
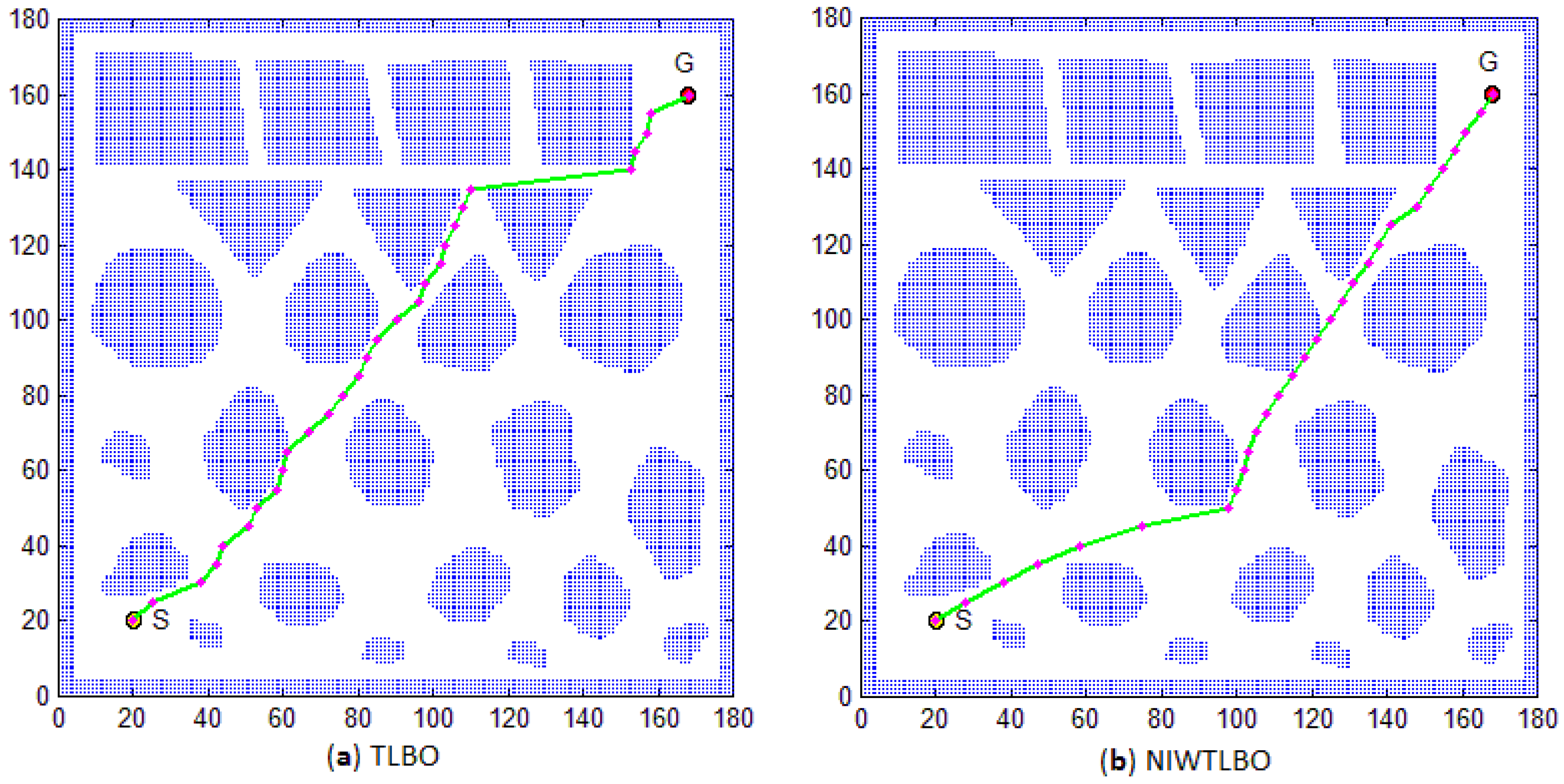
5.2. NIWTLBO vs. TLBO in Different Scenarios of the Path Planning with No Coordinate Transformation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Châari, I.; Koubâa, A.; Bennaceur, H.; Ammar, A.; Trigui, S.; Tounsi, M.; Shakshuki, E.; Youssef, H. On the Adequacy of Tabu Search for Global Robot Path Planning Problem in Grid Environments. Proced. Comput. Sci. 2014, 32, 604–613. [Google Scholar] [CrossRef]
- Garcia, M.A.P.; Montiel, O.; Castillo, O.; Sepúlveda, R.; Melin, P. Path planning for autonomous mobile robot navigation with ant colony optimization and fuzzy cost function evaluation. Appl. Soft Comput. 2009, 9, 1102–1110. [Google Scholar] [CrossRef]
- Yin, L.; Yin, Y.X. Simulation Research on Path Planning Based on Dynamic Artificial Potential Field. J. Syst. Simul. 2009, 21, 3325–3320. [Google Scholar]
- Kumar, M.P.S.; Rajasekaran, S. A neural network based path planning algorithm for extinguishing forest fires. Int. J. Comput. Sci. Issues 2012, 9, 563–568. [Google Scholar]
- Tuncer, A.; Yildirim, M. Dynamic path planning of mobile robots with improved genetic algorithm. Comput. Electr. Eng. 2012, 38, 1564–1572. [Google Scholar] [CrossRef]
- Liang, J.-H.; Lee, C.-H. Efficient collision-free path-planning of multiple mobile robots system using efficient artificial bee colony algorithm. Adv. Eng. Softw. 2015, 79, 47–56. [Google Scholar] [CrossRef]
- Contreras-Cruz, M.A.; Ayala-Ramirez, V.; Hernandez-Belmonte, U.H. Mobile robot path planning using artificial bee colony and evolutionary programming. Appl. Soft Comput. 2015, 30, 319–328. [Google Scholar] [CrossRef]
- Das, S.; Abraham, A.; Chakraborty, U.K.; Konar, A. Differential Evolution Using a Neighborhood-Based Mutation Operator. IEEE Trans. Evolut. Comput. 2009, 13, 526–553. [Google Scholar] [CrossRef]
- Beheshti, Z.; Shamsuddin, S.M. Non-parametric particle swarm optimization for global optimization. Appl. Soft Comput. 2015, 28, 345–359. [Google Scholar] [CrossRef]
- Bo, S.; Dong, C.W.; Geng, X.Y. Particle Swarm Optimization Based Global Path Planning for Mobile Robots. Control Decis. 2005, 20, 1052–1054. [Google Scholar]
- Henrich, D. Fast Motion Planning by Parallel Processing—A Review. Intell. Robot. Syst. 1997, 20, 45–69. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching-learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput. Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching-Learning-Based Optimization: An optimization method for continuous non-linear large scale problems. Inf. Sci. 2012, 183, 1–15. [Google Scholar] [CrossRef]
- Rao, R.V.; Patel, V. An elitist teaching-learning-based optimization algorithm for solving complex constrained optimization problems. Int. J. Ind. Eng. Comput. 2012, 3, 535–560. [Google Scholar] [CrossRef]
- Rao, R.V.; Patel, V. Multi-objective optimization of heat exchangers using a modified teaching-learning-based optimization algorithm. Appl. Math. Model. 2013, 37, 1147–1162. [Google Scholar] [CrossRef]
- Satapathy, S.C. Weighted Teaching-Learning-Based Optimization for Global Function Optimization. Appl. Math. 2013, 4, 429–439. [Google Scholar] [CrossRef]
- Chen, D.; Zou, F.; Li, Z.; Wang, J.; Li, S. An improved teaching-learning-based optimization algorithm for solving global optimization problem. Inf. Sci. 2015, 297, 171–190. [Google Scholar] [CrossRef]
- Satapathy, S.C. Improved teaching learning based optimization for global function optimization. Decis. Sci. Lett. 2013, 2, 23–34. [Google Scholar] [CrossRef]
- Rao, R.V.; Patel, V. An improved teaching-learning-based optimization algorithm for solving unconstrained optimization problems. Sci. Iran. 2013, 20, 710–720. [Google Scholar] [CrossRef]
- Sultana, S.; Roy, P.K. Multi-objective quasi-oppositional teaching learning based optimization for optimal location of distributed generator in radial distribution systems. Int. J. Electr. Power Energy Syst. 2014, 63, 534–545. [Google Scholar] [CrossRef]
- Rao, R.V.; Patel, V. A multi-objective improved teaching-learning based optimization algorithm for unconstrained and constrained optimization problems. Int. J. Ind. Eng. Comput. 2014, 5, 1–22. [Google Scholar]
- Wu, Z.S.; Fu, W.P.; Xue, R. Nonlinear Inertia Weighted Teaching-Learning-Based Optimization for Solving Global Optimization Problem. Comput. Intell. Neurosci. 2015, 2015, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Motion Planning Maps. Available online: http://imr.ciirc.cvut.cz/planning/maps.xml (accessed on 4 July 2016).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Min. Value | Max. Value | Mean | Std |
|---|---|---|---|---|
| PSO | 219.022 | 240.573 | 228.434 | 8.0535 |
| ABC | 190.083 | 211.559 | 192.654 | 7.9538 |
| DE | 189.811 | 210.876 | 191.326 | 7.8426 |
| TLBO | 187.484 | 199.641 | 188.043 | 5.1192 |
| NIWTLBO | 186.988 | 190.648 | 187.621 | 1.6746 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Fu, W.; Xue, R.; Wang, W. A Novel Global Path Planning Method for Mobile Robots Based on Teaching-Learning-Based Optimization. Information 2016, 7, 39. https://doi.org/10.3390/info7030039
Wu Z, Fu W, Xue R, Wang W. A Novel Global Path Planning Method for Mobile Robots Based on Teaching-Learning-Based Optimization. Information. 2016; 7(3):39. https://doi.org/10.3390/info7030039
Chicago/Turabian StyleWu, Zongsheng, Weiping Fu, Ru Xue, and Wen Wang. 2016. "A Novel Global Path Planning Method for Mobile Robots Based on Teaching-Learning-Based Optimization" Information 7, no. 3: 39. https://doi.org/10.3390/info7030039