1. Introduction
The behaviour of terrorists using explosives changed in last decade of bombings: improvised explosives (IEs) produced with chemical substances available on the market substituted commercial and military explosives [
1,
2,
3,
4]. The chemical substances used in home-made preparations of IEs are called precursors. The European Parliament and the Council adopted the Regulation (EU) No. 98/2013 on the marketing and use of explosives precursors on 15 January 2014 [
5]. According to this regulation, seven precursors shall not be available to the general public anymore in concentrations greater than their limit values listed in
Table 1 and other precursors, listed in
Table 2, will be monitored to report suspicious transactions when purchased by the public.
The traces of precursors used in IEs production (particulates, vapours and/or waterborne) present in the environment surrounding the vicinity of a “bomb factory” could allow police forces to locate sites, where the on-going manufacturing of IEs is suspected. This approach for protecting citizens from bombings is expected to be more effective than simply patrolling a possible target, because the production time of IEs is much longer than the time needed to transport an improvised explosive device (IED) close to the target from the manufacturing site [
6]. Between 2009 and 2011, the LOTUS project developed sensors to detect precursors of both drugs of abuse and IEs in the environment. Another project, called “Bomb factory detection by Networks of Advanced Sensors” (BONAS) [
7], recently studied a network of wireless sensors to detect precursors of IEs outside explosives manufacturing sites. Results from the BONAS project about the analysis of the precursor hydrogen peroxide have been recently published [
8]. The different sensors of the BONAS project were specifically designed to be deployed in sensitive locations and easily camouflaged. This network allows an early threat alarm thanks to an expert system, which is a system allowing the detection of one precursor based on the signal provided by a single sensor, the detection of one precursor based on the signal provided by more than one sensor, and the production of a global alarm level based on data fusion from all the sensors of the network. The aim of the present work is to show how the expert system was successfully developed and tested to play its key role in protecting the security of citizens.
3. Materials and Methods
3.1. Advanced Sensors Network and IE Precursors
The BONAS project developed a network of advanced sensors able to detect traces of precursors used in IEs’ production present in the environment surrounding the vicinity of a “bomb factory”. Sensors based on a wide range of analytical methods were selected in order to enable the detection of precursors in different forms, i.e., particulates, vapours and/or waterborne.
The sensors developed and tested throughout the project include a quartz-enhanced photo-acoustic spectroscopy (QEPAS) sensor, an electrochemical (EC) sensor, a light detection and ranging (LIDAR)/differential absorption LIDAR detection system (DIAL) sensor, and a surface-enhanced Raman spectroscopy (SERS) sensor.
The substances considered in the project were selected among the IE precursors taken into account by the Regulation (EU) No. 98/2013 on the marketing and use of explosive precursors. Overall, classification models for the classification of five precursors with different forms were computed. These precursors are listed in
Table 3 as codes, because their names are Confidential EU.
Three key requirements were identified in the development of the present expert system: (i) minimization of false positive detections at sensor level (described in
Section 3.2); (ii) flexibility of the system in terms of type and number of sensors included at any time in the network (described in
Section 3.3); (iii) flexibility of the system in terms of choice of the parameters that determine the global alarm activation (described in
Section 3.4), in order to allow the user to easily customize the system according to the condition-specific needs.
All data analysis were performed using the PLS Toolbox ver. 7.5 and ver. 7.8.2 (Eigenvector Research Inc., Manson, WA, USA) and all routines were written in Matlab© platform 7.11 R2010b (The Mathworks Inc., Natick, MA, USA).
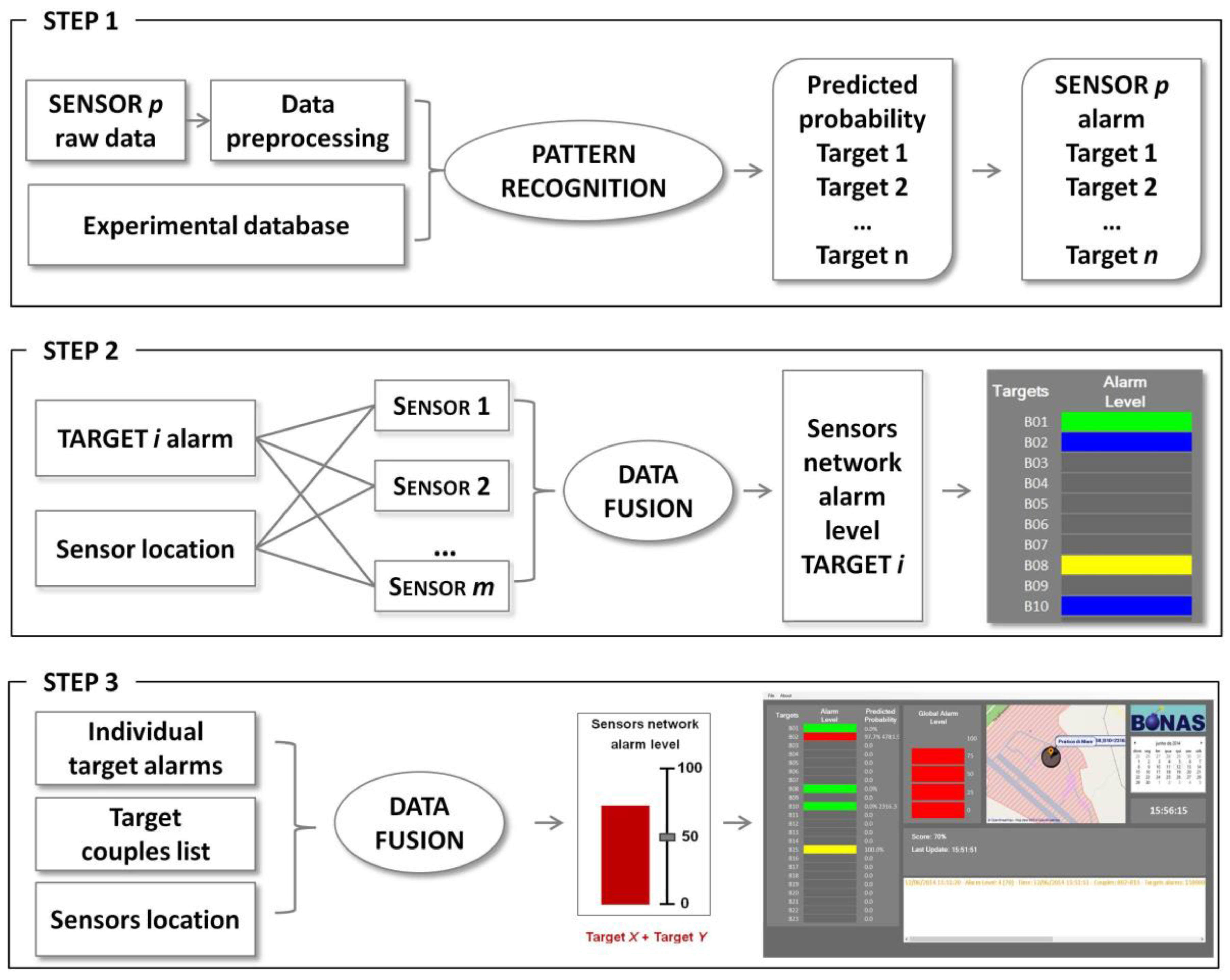
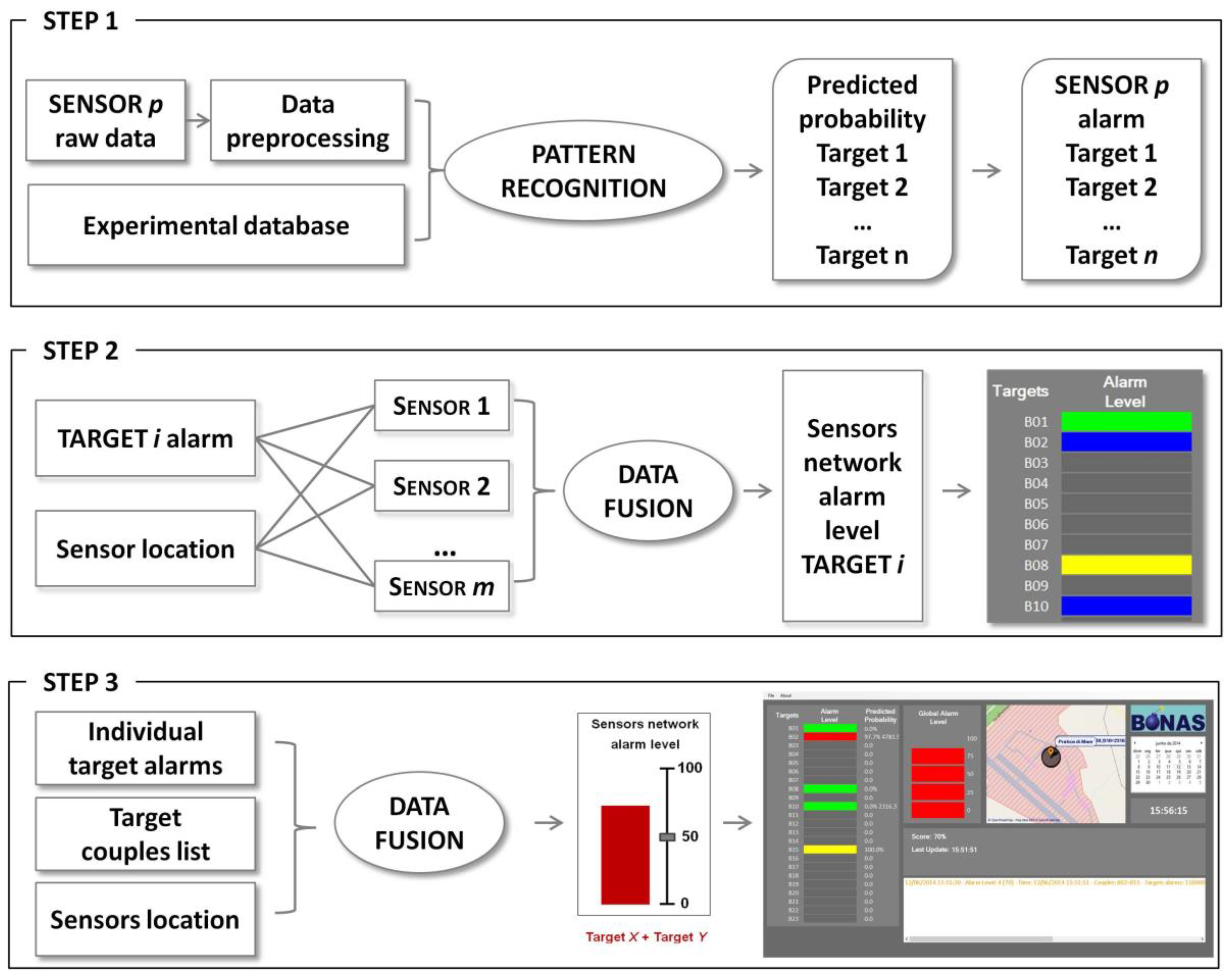
3.2. STEP 1: Supervised Pattern Recognition at Sensor Level
At the first step, the expert system is requested to estimate the predicted probability of presence of each target for each sensor included in the sensor network. To this aim, different classification rules were chosen, based on the nature of the sensor data. In particular, for QEPAS and EC, Partial Least Squares-Discriminant Analysis (PLS-DA) [
9] models were developed using experimental data acquired from laboratory and field conditions.
The PLS-DA classification models were validated by means of an external test set, and their performance was evaluated on the basis of the following parameters:
sensitivity (SENS): the percentage of objects of each modelled class correctly accepted by the class model;
specificity (SPEC): the percentage of objects of the other classes correctly rejected by the class model;
efficiency (EFF): the geometric mean of sensitivity and specificity.
Once the optimal model for each target substance has been selected, for any new measurement the probability of the presence of the different target substances can be computed and stored. An alarm is then triggered if this value exceeds the corresponding probability threshold. In order to better exploit the collected analytical information, two different thresholds are considered:
a lower threshold (maxeff_thresh): probability threshold which provides the best compromise between false positive and false negative results;
a higher threshold (maxspec_thresh): probability threshold which allows to minimize false positive results.
Following the double threshold approach, two different alarm levels are considered: a lower alarm level is provided when the predicted probability exceeds the value of maxeff_thresh but is lower than maxspec_thresh, because it means that the predicted probability value is below the threshold that minimizes the false positive results, while a higher level alarm is given when the predicted probability exceeds the value of maxspec_thresh as well.
In the case of the SERS sensor, a simpler classification rule was used, based on the correlation coefficient between the signal measured on the sample and the corresponding signal measured on the pure target. Concerning the LIDAR sensor, it provided a concentration value of the precursor B10 [
7].
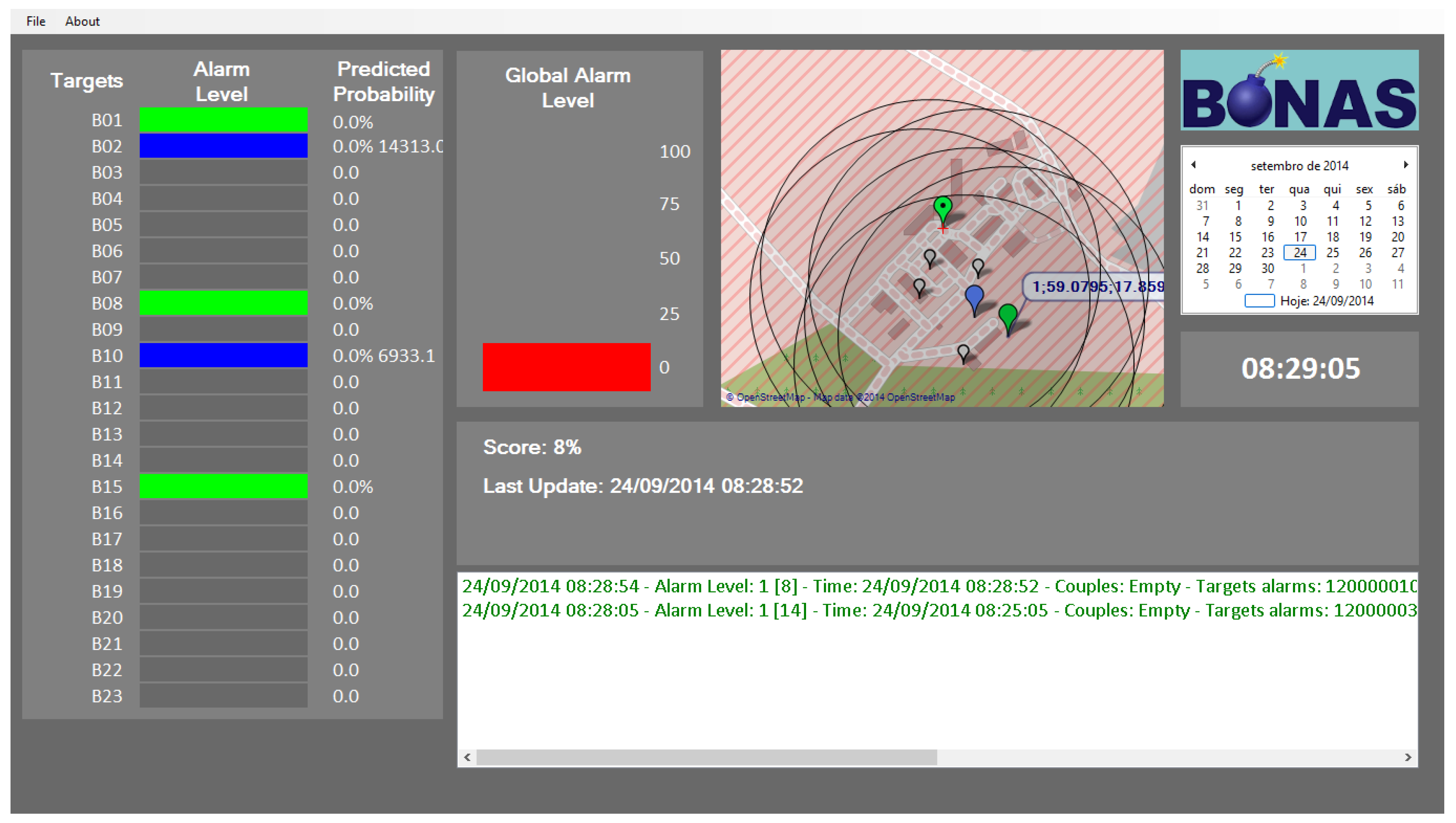
In addition to the display of the detected target names and of the obtained predicted probability values, a simple colour-based code has been implemented to summarize this information in the expert system human interface and facilitate the interpretation of results. In particular, a green bar is used to indicate that no detection has occurred while a blue or yellow bar is displayed when a lower or higher alarm has been triggered, respectively. A numeric value of 1, 2 and 3 has been assigned to green, blue and yellow colour codes, respectively (
Table 4).
A schematic overview of the approach used in the first step of the expert system is provided in
Figure 2.
The colour code obtained by each sensor for each target substance at this step is stored in a matrix, which is passed to the function of the second step of the expert system. In this way, this information can then be integrated with that of the other sensors of the network and a unique alarm level for each target substance can be therefore provided to the end-user.
3.2.1. QEPAS Sensor
For the BONAS project, the CREO team developed a QEPAS sensor allowing IR analysis of vapour [
10]. At the first step, a database of experimental signals was created in order to calculate the PLS-DA classification model at the basis of the developed expert system. In order to obtain a representative spectra database, signals were acquired both in laboratory and on field conditions. In particular, a laboratory dataset was created in laboratory by acquiring spectra of four target substances, i.e., B01, B02, B03 and B10 and four interferents, i.e., Int02, Int05, Int10 and Int11 at two different concentration levels have been acquired. In order to evaluate the reproducibility of the system, at least two samples (replicates) of each substance at each concentration were considered. The laboratory spectra database was initially investigated by means of Principal Component Analysis (PCA) considering several data pre-treatments (data not shown for conciseness reasons). The results of this explorative analysis suggested focusing on two main target molecules, i.e., B02 e B10.
Considering that the QEPAS sensor is able to analyze vapors, the database was then updated with data acquired during on-field tests carried out according to realistic IE preparation scenarios. During this test campaign, two target substances included in the priority list for BONAS and one interferent were tested, i.e., target B02, target B10 and Int10. The composition of the updated datasets used for classification model computation of both target B02 and target B10 are reported in
Table 5.
Subsequently, these datasets have been used to compute the classification models for the two targets and the selected classification model was then used to analyze the data acquired during on field tests carried out in realistic scenarios.
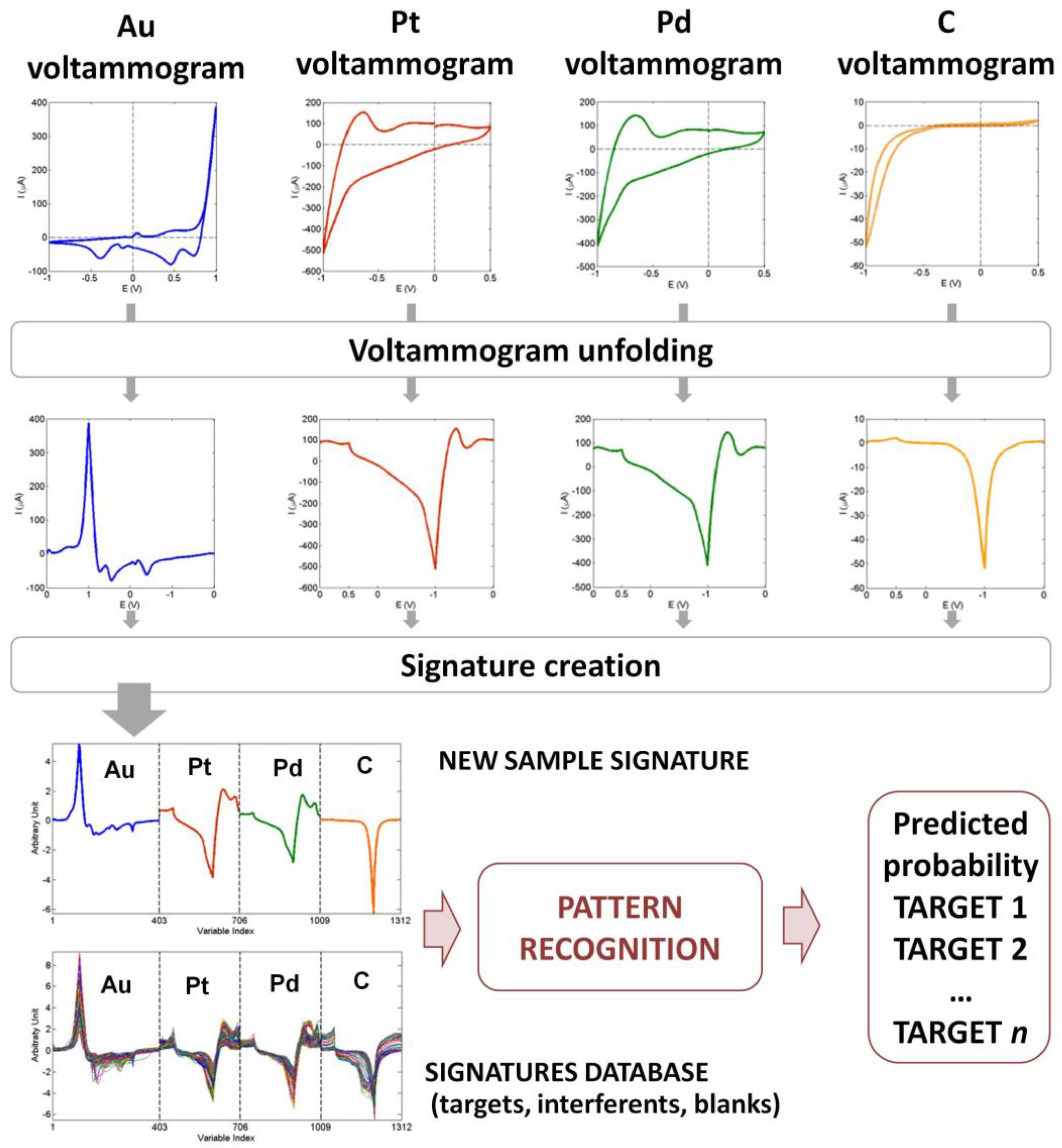
3.2.2. EC Sensor
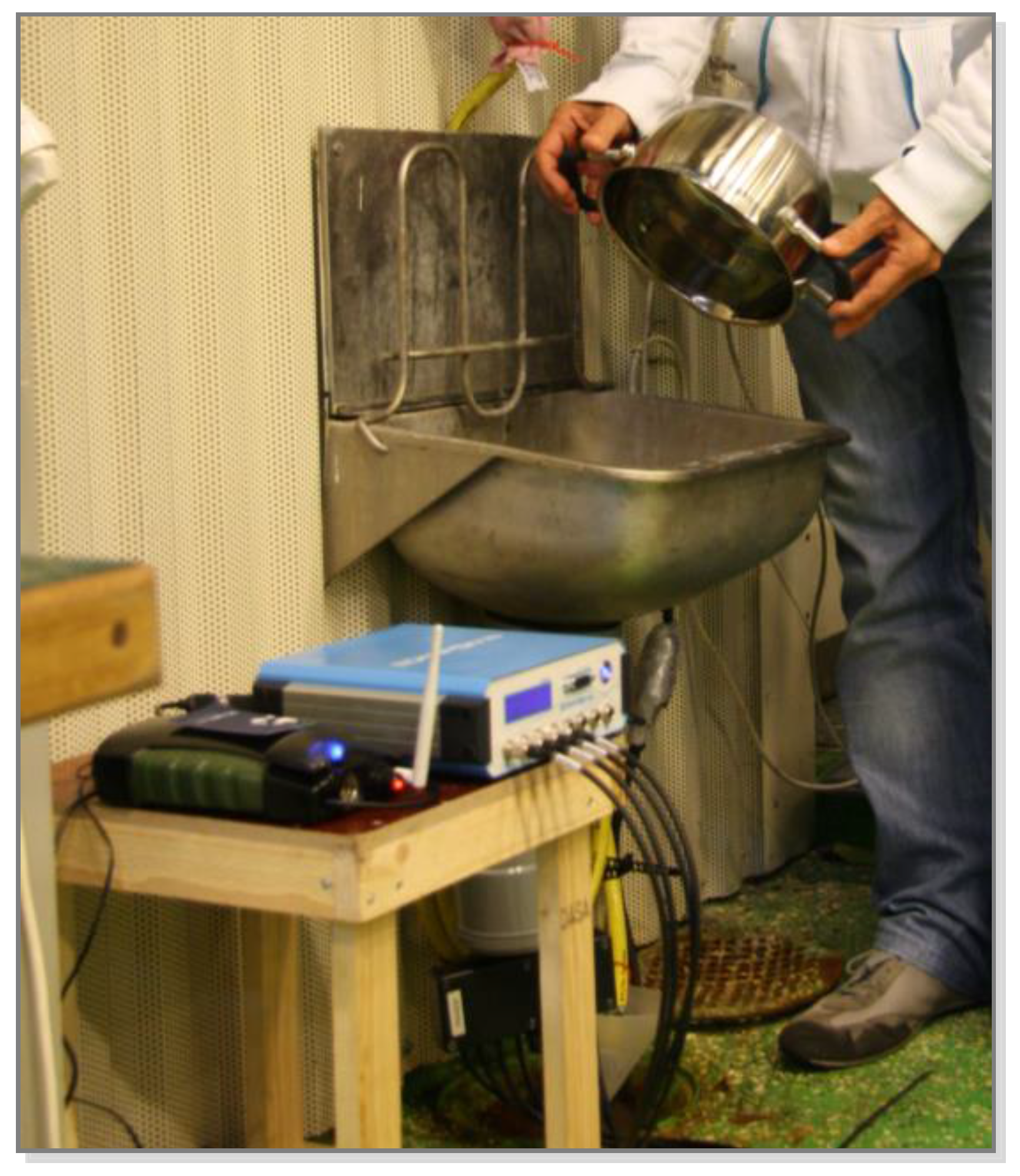
For the BONAS project, the UCBL team [
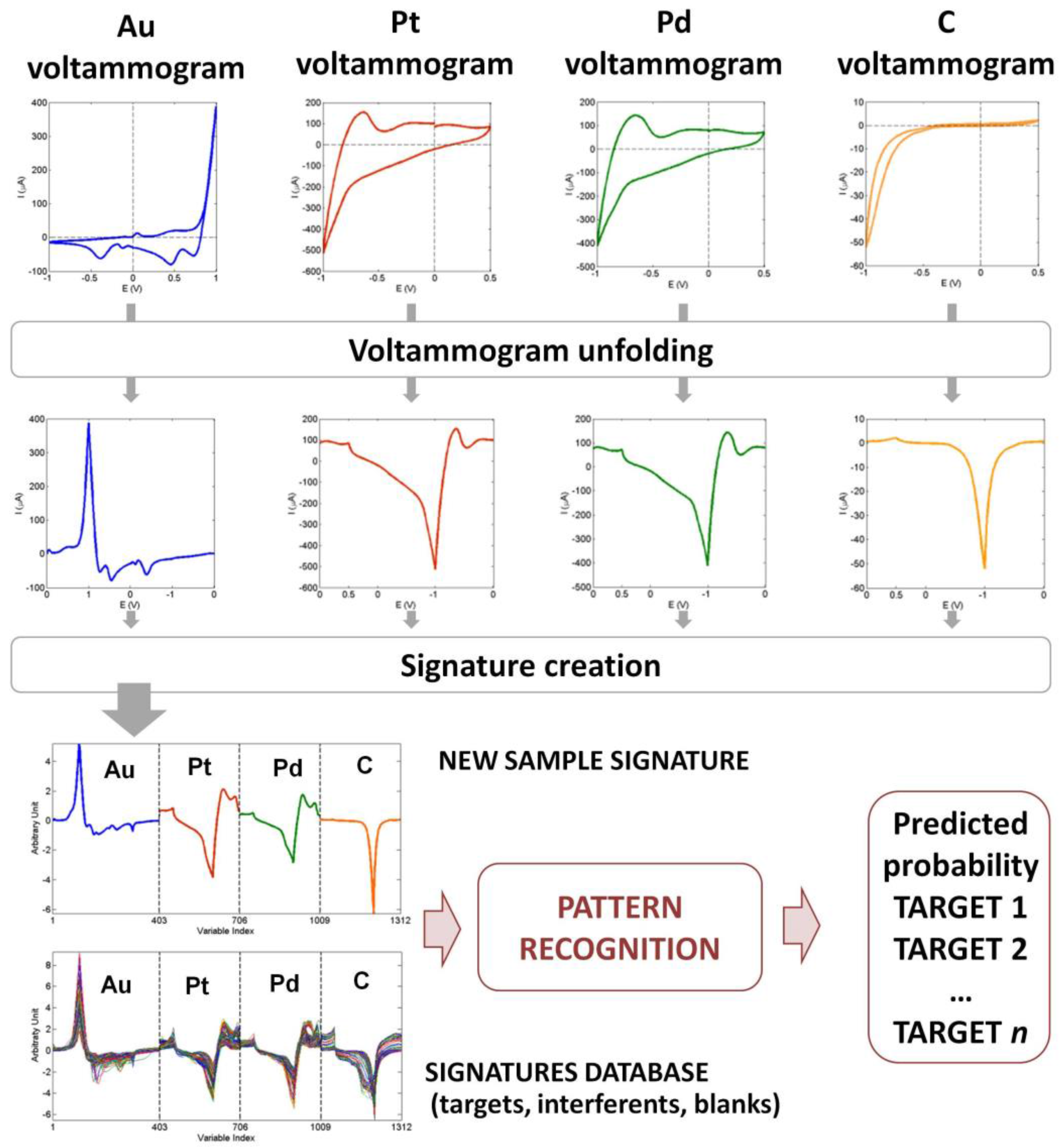
7] developed an electrochemical sensor dedicated to the achievement of simultaneous monitoring of different explosive precursors. The BONAS EC sensor uses electrodes to oxidize or reduce molecules soluble in water using portable electrodes, easily hidden in the sewage system, operating stand-alone by battery, with wireless communication capability. The electrochemical chips used for the acquisition of the database signals were of one counter electrode, one pseudo-reference electrode and eight working electrodes. These electrodes were divided into two series of four electrodes each; in each series, three electrodes were modified with different electrodeposited metals (gold, palladium and platinum), resulting in four voltammograms per analysis. In addition to the analysis of the individual signals of the different electrode surfaces, another approach based on the creation of a unique signature for each sample was applied so as to take full advantage of the information provided by the different electrodes on the same sample. To this aim, the signals acquired with the four electrode surfaces were merged together as a sequence and each block of data then was scaled to unit variance, in order to assign equal importance to information provided by the different electrodes. A schematic representation of this approach is shown in
Figure 3.
In addition to the three main target substances analysed by this sensor, i.e., B01, B08 and B15, data were acquired also on additional target substances, i.e., B04, B05 and B11, and on the interferent Int09, selected as components of common cleaning products. The measurements were realized in: (i) NaCl 0.1 M electrolyte solution; (ii) tap drinking water; (iii) tap non-drinkable water (iv) soap water (GEH dish washing soap 0.1% v/v in tap drinking water) and (v) artificial sewage water prepared, using tap drinking water. The composition of the dataset used for the calculation of the PLS-DA classification models of target B01, target B08 and target B15 is reported in
Table 6.
Similarly to the QEPAS sensor, also in this case these datasets have been used for the computation of classification models to be applied on the data acquired during on field tests carried out in realistic scenarios.
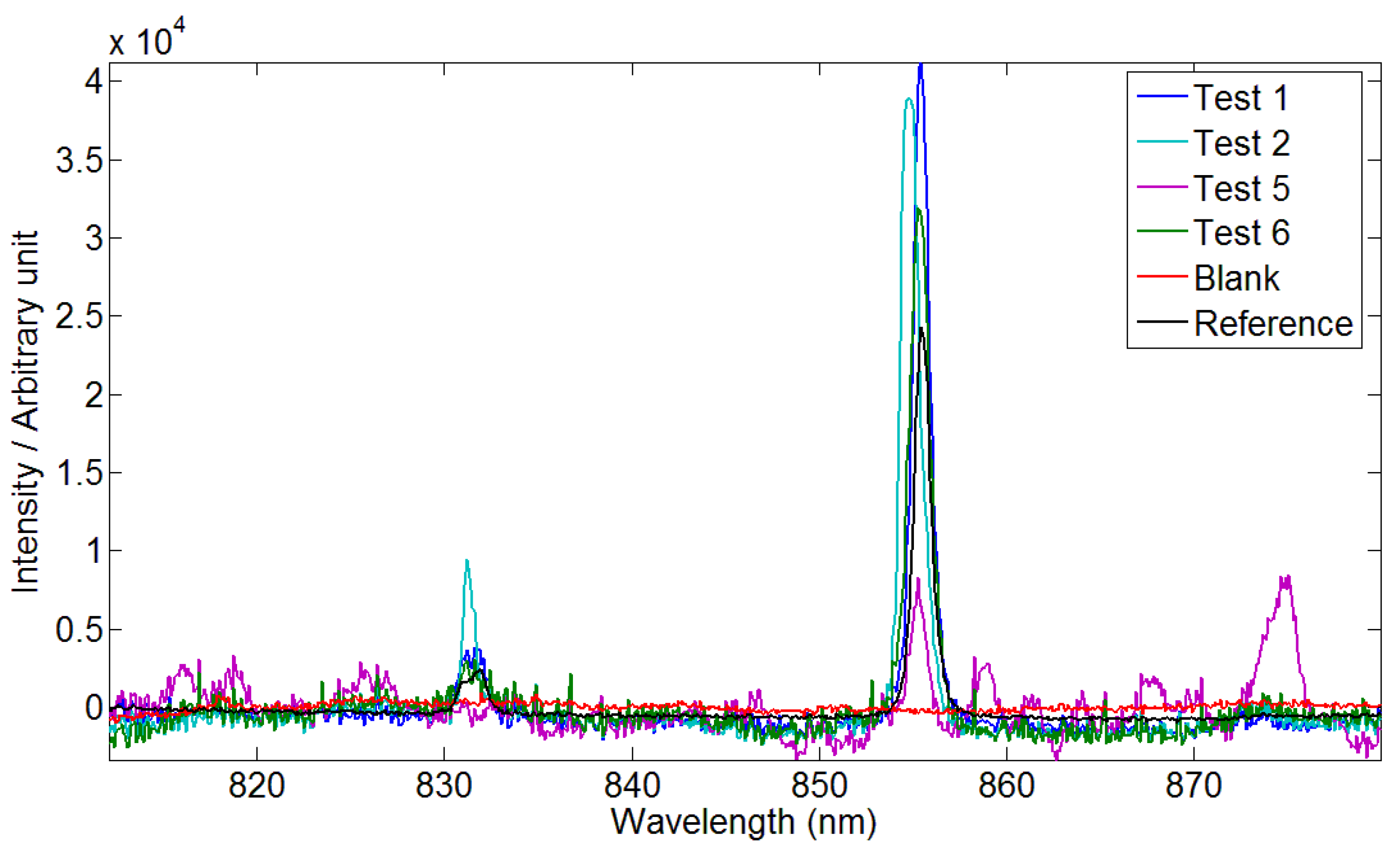
3.2.3. SERS Sensor
For the BONAS project, the Serstech team [
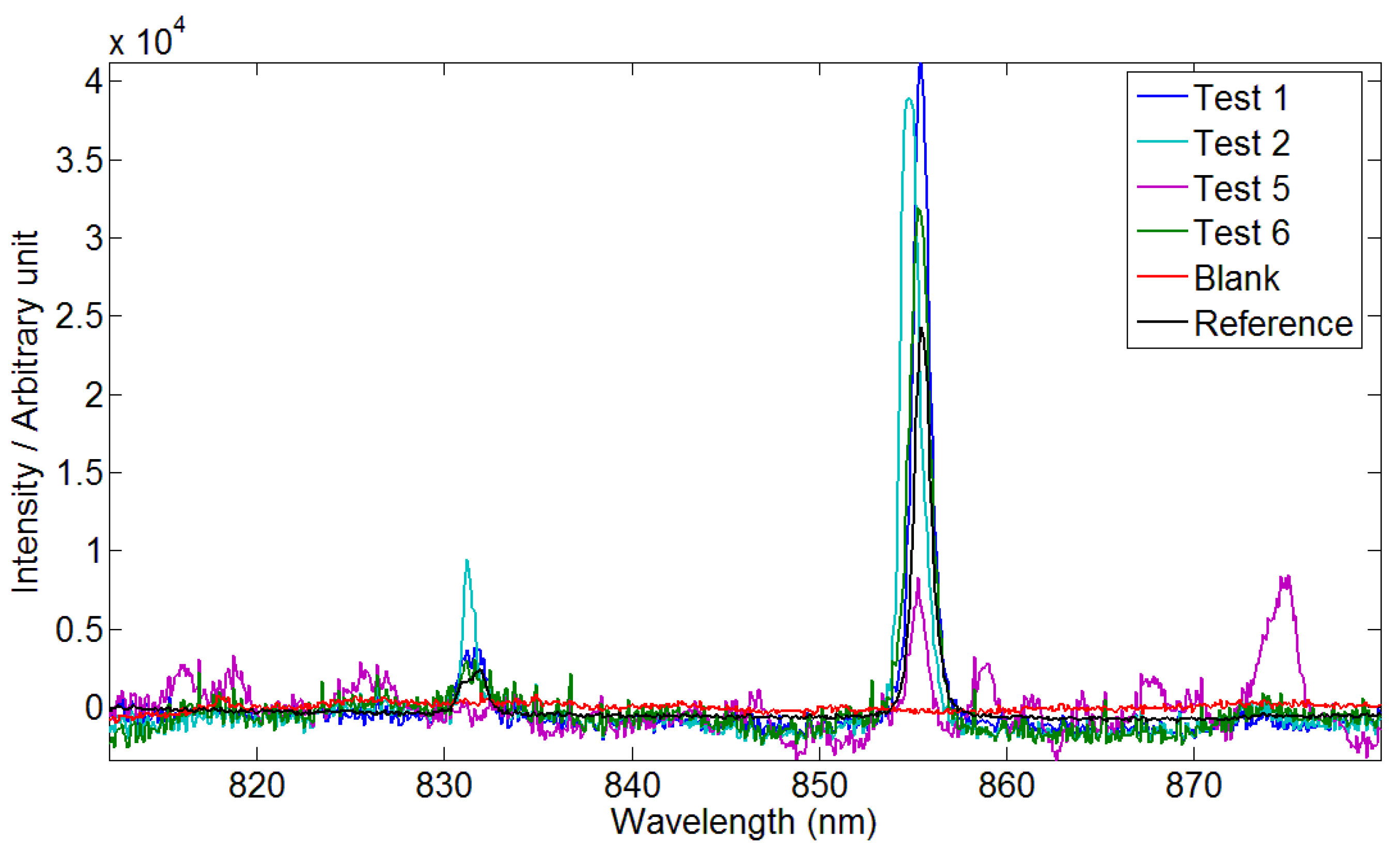
7] developed a SERS based sensor, used for detecting particles and/or vapours in the air surrounding a potential IED factory. Briefly, the sensor system consists of a miniaturized Raman spectrometer in combination with a sampling system for collecting particles and/or vapours from the surrounding air. The sampling system collects air through an inlet fan and directs this to a cooled SERS-surface were particles are trapped onto the surface. The SERS-substrate is then dried by heating and placed in position for measurement by the Raman spectrometer. The resulting spectral information is transferred to the command centre for data analysis.
In order to test the possibility to successfully integrate this sensor in the expert system, a very preliminary data analysis approach was applied during the on field test campaign. The approach was based on the calculation of the linear correlation coefficient (R) between any new acquired spectrum and a reference spectrum, after having applied a pre-processing step by means of linear detrend in order to remove baseline shifts. Furthermore, on the basis of a meeting with the specialists in charge of the sensor, only the data in spectral range between 812 and 880 nm have been considered for data analysis. For alarm triggering, it was set a criteria of correlation coefficient above a threshold of 0.8 with a significance level of 0.05.
3.2.4. Lidar/DIAL Remote Sensor
For the BONAS project, the ENEA [
7] and CSM teams [
7] developed a lidar/DIAL remote sensor. As far it is concerned, no pattern recognition analysis has been required, since the sensor output is not provided as raw data or signals but directly as target B10 concentration values. In this case, therefore, the expert system just compares the concentration value in output with a concentration threshold defined experimentally that can be easily modified by the user.
This information is then integrated with the response of the other sensors during the second step of the expert system in order to trigger an alarm.
In order to take into account the limited selectivity of the sensor response, at this step the concentration values obtained for target B10 were also converted to equivalent concentration values of the other target substance the sensor can detect, i.e., target B02 . This is achieved by applying a correction factor defined according of the optical absorption characteristic of target B02. Therefore, whenever lidar/DIAL remote sensor has a positive detection, alarms are triggered for all the target substances it can detect (i.e., B10 and B02). However, this aspect is considered at the second step of the expert system and, when other sensors confirm the detection of only one of the lidar/DIAL target substances, the alarms triggered for the other one is set back to “no detection”.
3.3. STEP 2: High-Level Data Fusion for Single Target Substance Detection
At the second step, the expert system is requested to integrate the output given from multiple sensors measuring the same target to provide the user with a unique alarm value for each compound.
Over the years, a considerable number of data fusion methods have been developed, which can be roughly subdivided into three different levels as follows [
11]:
low-level fusion, where the raw signals provided by the different sensors are combined before performing any data pre-processing;
mid-level fusion, which is based on the combination of features extracted from the data of each sensor;
high-level fusion, where the response of the different sensors (e.g., detection decision) are combined to obtain a unique response.
Considering the need of having a flexible expert system able to include any new sensor as well as to consider the possibility of temporary inactivity (e.g., battery drained waiting for replacement) of some sensors, the high level data fusion approach has been selected to be used in the development of the expert system.
In particular, high level data fusion was used at this stage to enable the expert system to integrate the information about the alarms triggered for the same target substance by all the sensors which are included at that moment in the network and which are able to detect it.
To this aim, a dedicated routine was developed, which runs over all the target substances the sensors network is monitoring at that moment and it checks if any alarm has been triggered for each of them. If this is not the case, nothing happens and the green colour bar is displayed in the user interface. Similarly, when only one sensor is detecting that target substance, the same alarm level and the same color code given by that sensor is kept.
Whenever more than one sensor detects the same target substance, the information about their relative distance is first considered. For this reason, the distances between the positions of all those sensors are computed and compared with the defined threshold of maximum distance. For the stand-off sensors, the coordinates of the actual sampling volume are computed and considered in the calculation of their relative distance to the other sensors.
At this point, if all the sensors are closer to each other than the distance threshold, the final alarm level is calculated as a weighted sum of the alarm levels of the individual sensors. The alarm of each sensor is thus weighted according to the efficiency value of the model used at Step 1 for its definition so as to take into account also the ability of that model to correctly discriminate samples belonging or not to the target class. If this value is greater than 4 (orange colour code) then the alarm is set to the maximum level, i.e., 5, corresponding to a red colour code.
The colour codes used to represent the Step 2 output in the human interface are summarized in
Table 7.
It has to be underlined that the approach used in the development of the expert system allows maximum flexibility in terms of integration of the response provided by any sensor, even if not considered in the previous step of the expert system. This characteristic is particularly important since it allows to easily include in the network any possible new sensor by just communicating to the expert system the information about the code of the detected target substance, the concentration/probability measured, the concentration/probability threshold and its location. The flexibility of the expert system in easily integrating the response of sensors not considered at Step 1 has been successfully tested in the integration of the lidar/DIAL remote sensor response.
3.4. STEP 3: Data Fusion for Multiple Target Substances Detection
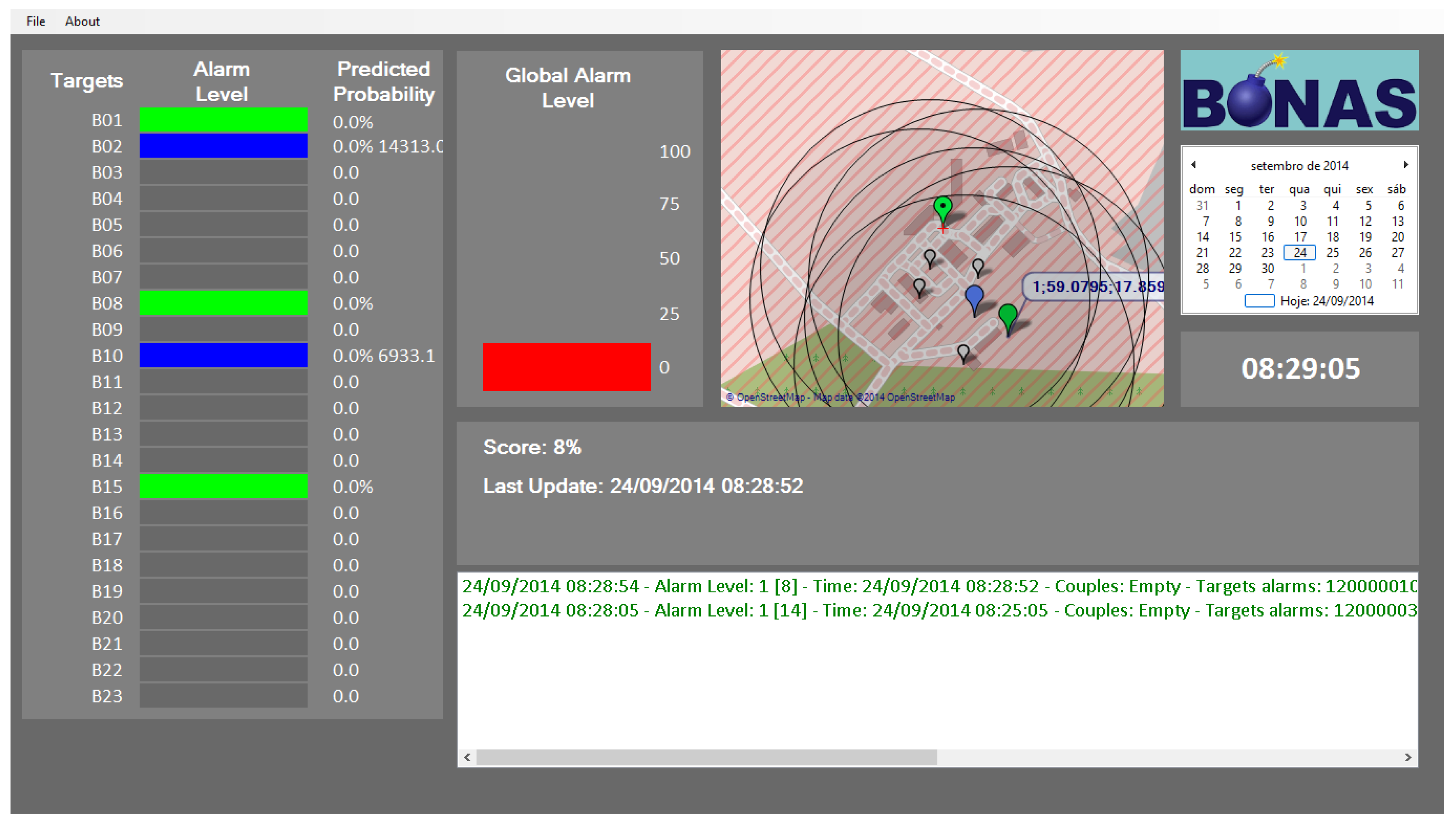
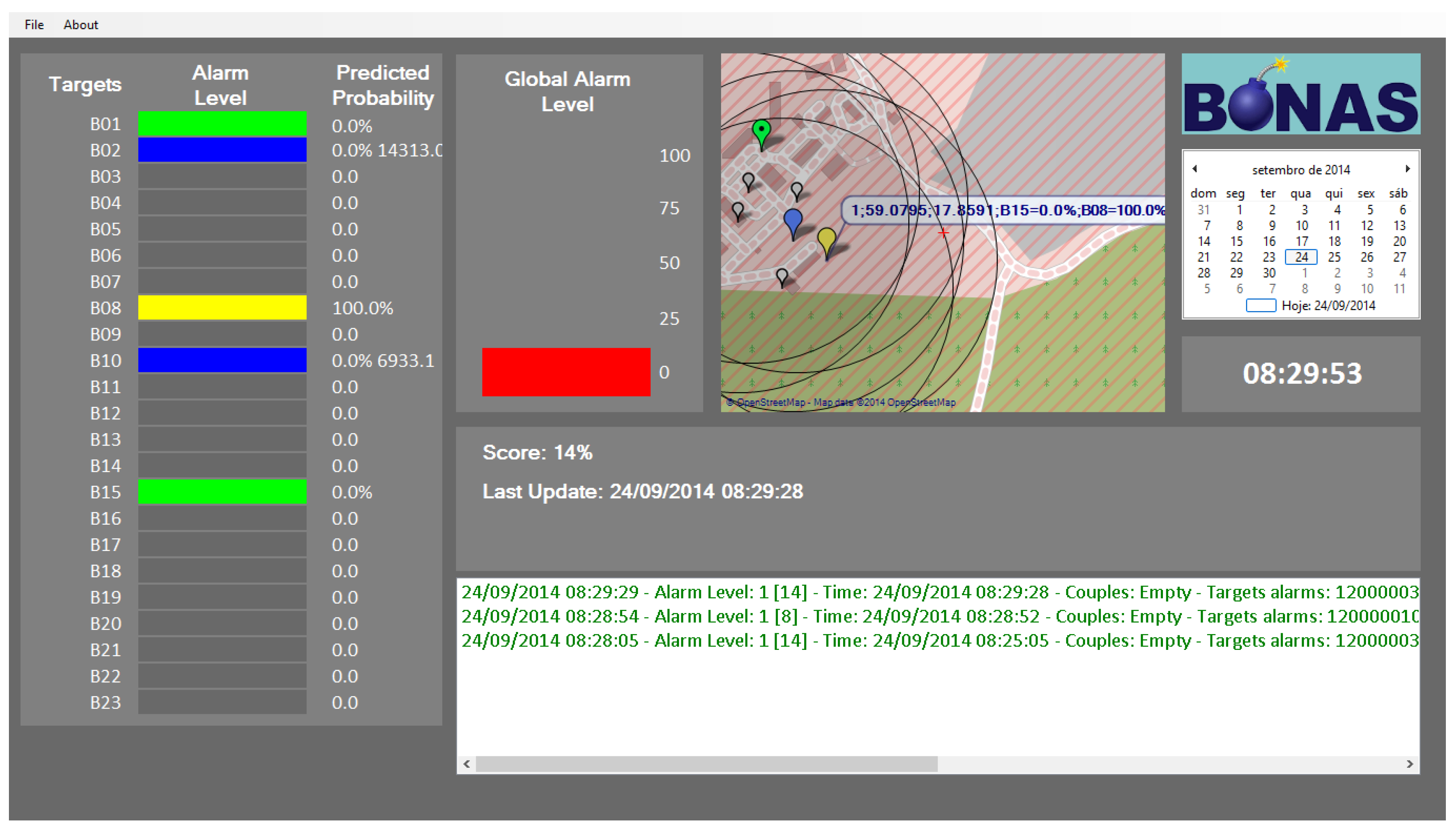
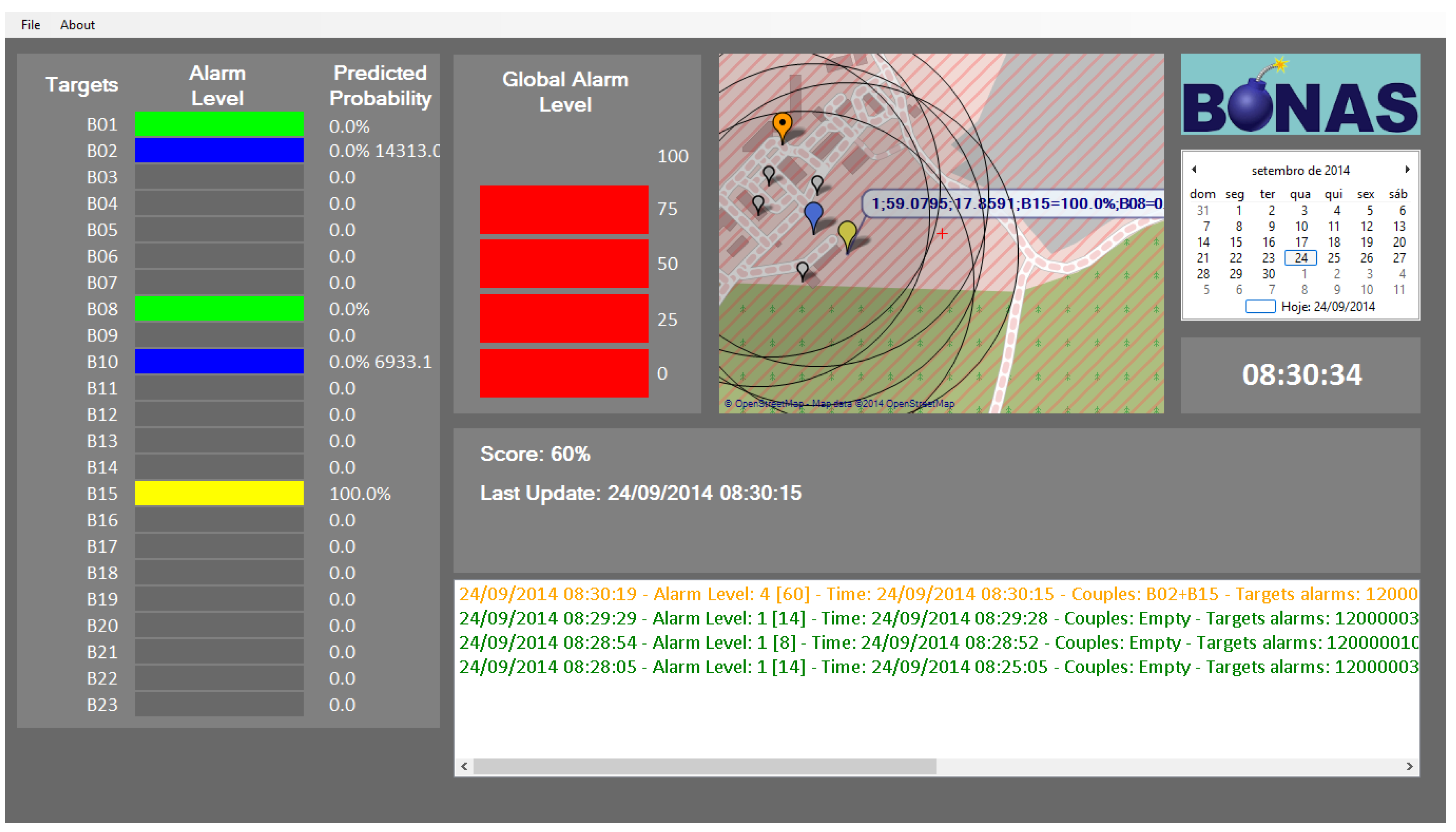
At the last step, the expert system further integrates the outputs of Step 1 and Step 2 to provide the user with a unique evaluation of the possible criminal threat of an IE production site, defined taking into account the information obtained from the entire network of sensors. The global alarm level provided as output of this third step, in fact, considers sensor location, the total number of detected targets as well as the detection of specific targets known to be used together to prepare a specific IE in a reasonably short time window.
In this context, particular attention has been paid to the development of a system characterized by maximum flexibility in terms of choice of the parameters that determine the alarm activation, in order to allow the user to easily customize the system according to the condition-specific needs. This means that the end user can easily modify the conditions that define an alarm triggering event as well as the global alarm threshold used to indicate the presence of a possible threat.
In the set up adopted, the global alarm ranges from 1 to 100 and the alarm threshold was set to 50. In case explosive compounds are being monitored by the sensors network, the detection of just one of them is considered as an alarm triggering event and the global alarm score is increased above the threshold according to its probability of detection. When only precursors are monitored, this threshold can be exceeded only in case specific couples of target substances are detected, while otherwise the alarm level is lower or equal to 50. The reason of this approach is to avoid an excessive number of false positives, because precursors can be used in legal activities. The first part of the score (from 1 to 50) is in fact just a weighed sum of the information provided by Step 2, where the weight to be given to each detected target substance is calculated according to the total number of target substances monitored at that time. The second part of the score (from 51 to 100) is instead defined according to the number of specific couples of target substances, which are being detected, and to their probability level of detection. The names of all the couples of target substances are displayed when detected together.
We stress once again the point that the system has maximum flexibility and that therefore the final user, according to the specific needs, can easily implement different choices about the parameters, which define the alarm activation. The user can thus easily modify the list of individual targets whose detection determine the alarm initiation in order to include, for example, not only explosive compounds but also precursors of particular interest. Similarly, also the list of couples of targets substances can be updated without requiring any modification of the routine code.
As mentioned above and similarly to what described in Step 2 (see
Section 3), also in this context the information about the relative distance between sensors is taken into account before combining the information about couples of target substances, i.e., the alarm is raised above the threshold only if the sensors which have detected the couple of target substances are located within the distance threshold defined by the user.
5. Conclusions
This paper describes the innovative expert system approach developed in the BONAS research project to exploit the information provided by the whole sensor network and to provide the end-user with a unique global evaluation of the possible criminal threat of an IE production site.
Three key requirements have been identified in the development of the present expert system: (i) minimization of false positive detections at the sensor level (developed within Step 1); (ii) flexibility of the system in terms of type and number of sensors included at any time in the network (developed within Step 2); (iii) flexibility of the system in terms of choice of the parameters that determine the global alarm activation (developed within Step 3), in order to allow the user to easily customize the system according to the condition-specific needs.
In order to meet these requirements, an expert system which follows a three-step workflow has been created.
During the first step, the expert system estimates the predicted probability of presence of each target for each sensor included in the BONAS network. To this aim, classification models were computed by means of a PLS-DA algorithm with a dataset of experimental data acquired by means of QEPAS and EC sensors both in laboratory and in field conditions. The computed classification models were then applied to any new data received to obtain the corresponding predicted probability value. Two different probability thresholds were then considered for alarm activation, one which allows to maximize classification efficiency and one which allows to maximize classification specificity (i.e., to minimize false positive results).
During the second step, the expert system integrates the output given from multiple sensors measuring the same target to provide the user with a unique alarm value for each compound. In this context, the application of a high-level data fusion approach allows to meet the requirement of having a flexible expert system able to include at this stage any new sensor (e.g., LIDAR sensor) as well as to consider the possibility of temporary inactivity of some sensors.
During the last step, the expert system further integrates the outputs from the previous steps to provide the user with a unique global evaluation of the possible criminal threat of an IE production site. The global alarm level provided as output of this third step is, in fact, defined considering the sensors’ locations, the short time, if any, between the positive detections of the total number of detected targets as well as the detection of specific targets known to be used together to prepare a specific IE. At this stage, the end user can easily customize the system according to the condition-specific needs by modifying the parameters that determine the alarm activation (e.g., the list of individual targets or the list of couples of targets substances whose detection determine the alarm).
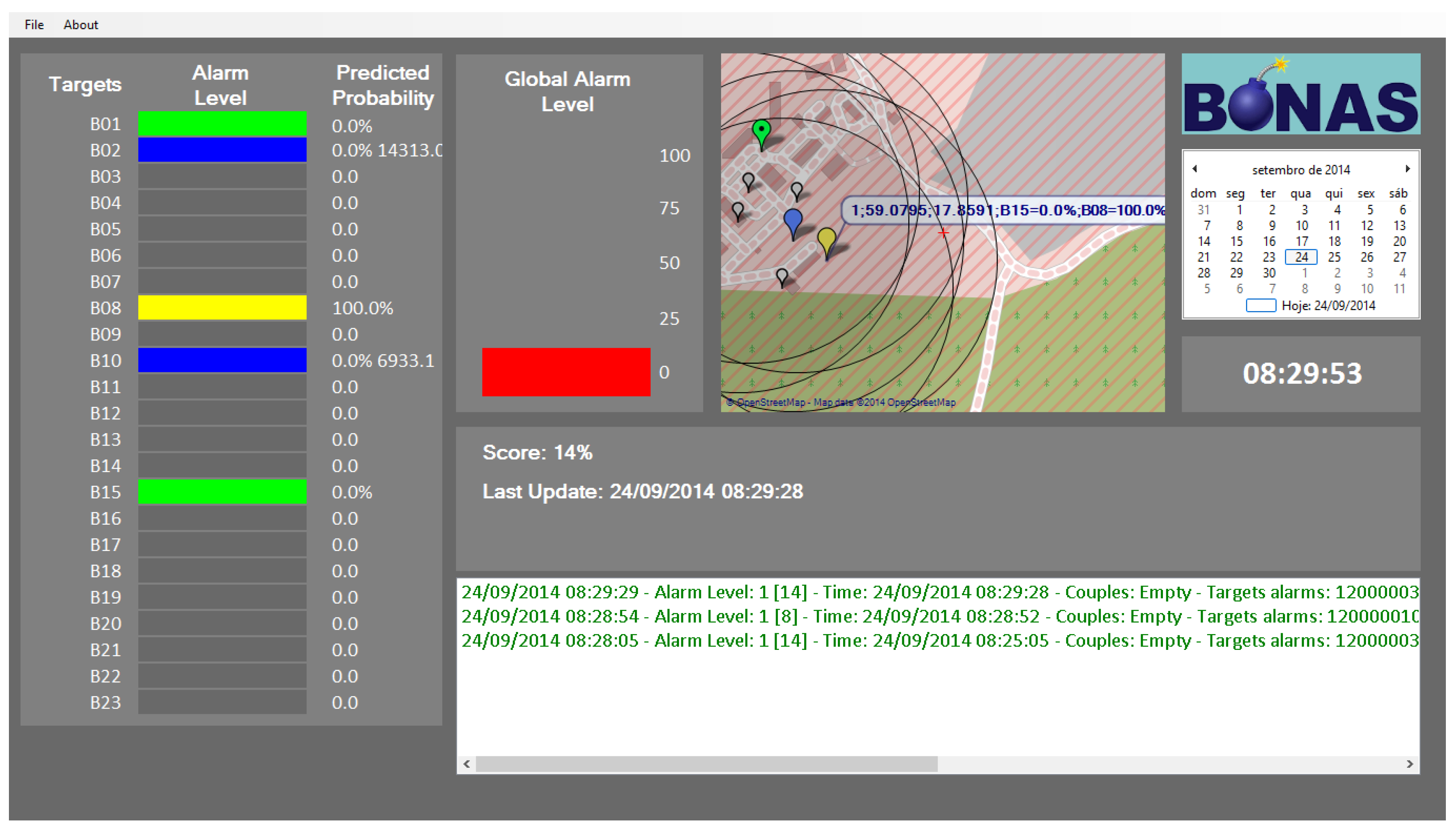
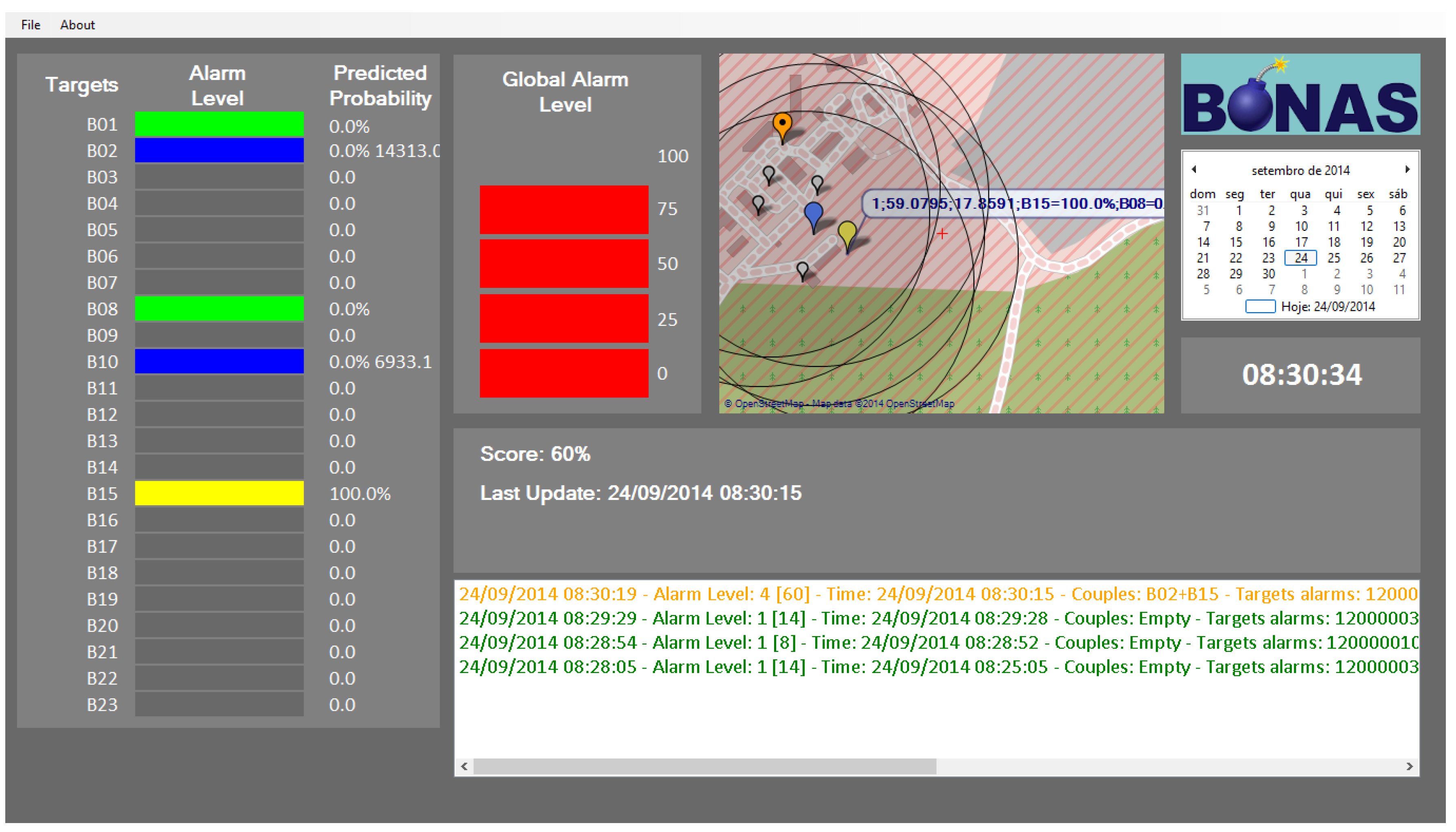
Finally, a dedicated user interface has been developed in collaboration with TEKEVER (reference) to provide the user with a compact representation of the information given by the expert system.
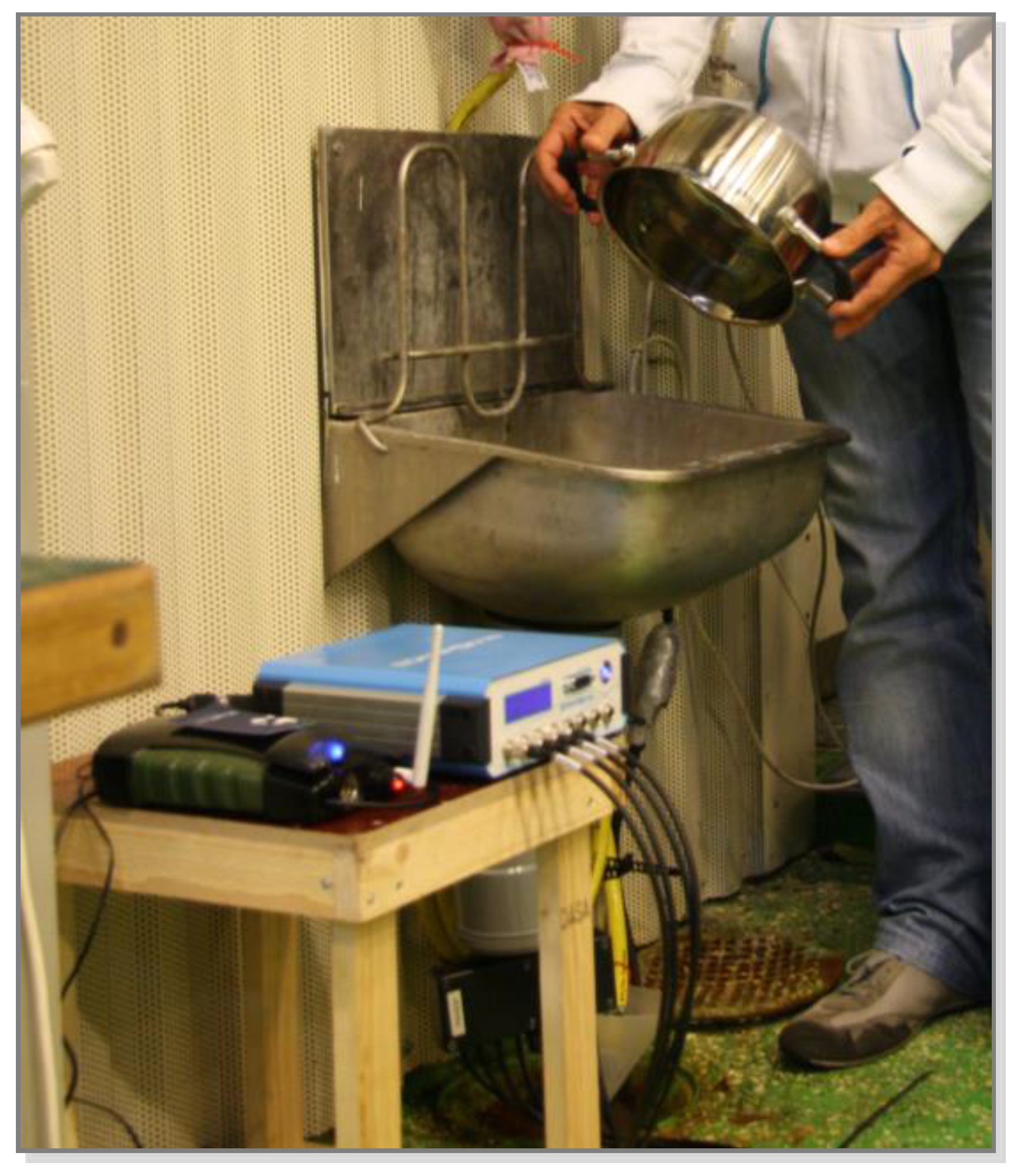
The performance of the developed sensor network was evaluated under relevant environmental conditions, i.e., in the presence of interferents and pollutants in both air and water, in the Italian Air Force base of Pratica di Mare and in Swedish Defence Research Agency facility in Grindsjön. An extensive validation of the capability of the expert system was carried out to effectively integrate the information provided by the different sensors showing that the end-users were effectively provided with a global alarm level, summarizing information from the entire network into a unique evaluation of the possible criminal threat of an IE production site. The expert system during the validation showed its capability to handle information not only from the BONAS sensors, but also from the sensors developed in another project, EMPHASIS. This flexibility in terms of integration of the response provided by any sensor allows easily including in the network any possible new sensor and establishing a large network supporting safer smart cities.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}