Demonstration Experiment and Numerical Simulation Analysis of Full-Scale Barge-Type Floating Offshore Wind Turbine

Abstract
:1. Introduction
2. Demonstration Experiment
2.1. General Specifications of the FOWT
2.2. Floating Support Structure
2.3. Mooring System
2.4. Wind Turbine
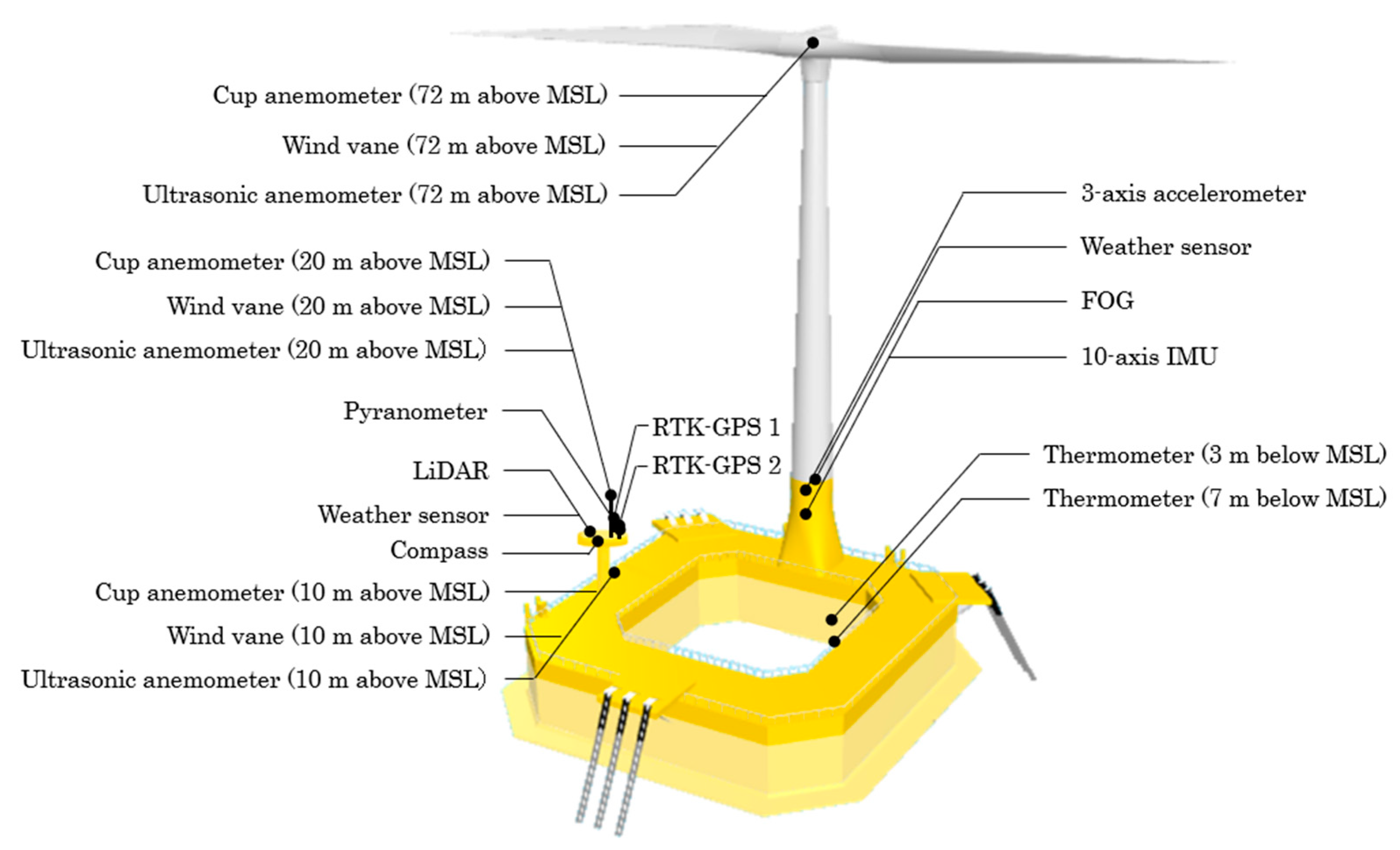
2.5. Measuring Instruments
3. Numerical Simulation
3.1. Hydrodynamic Analysis
3.2. Time Domain Analysis
4. Environment Condition
5. Results and Discussion
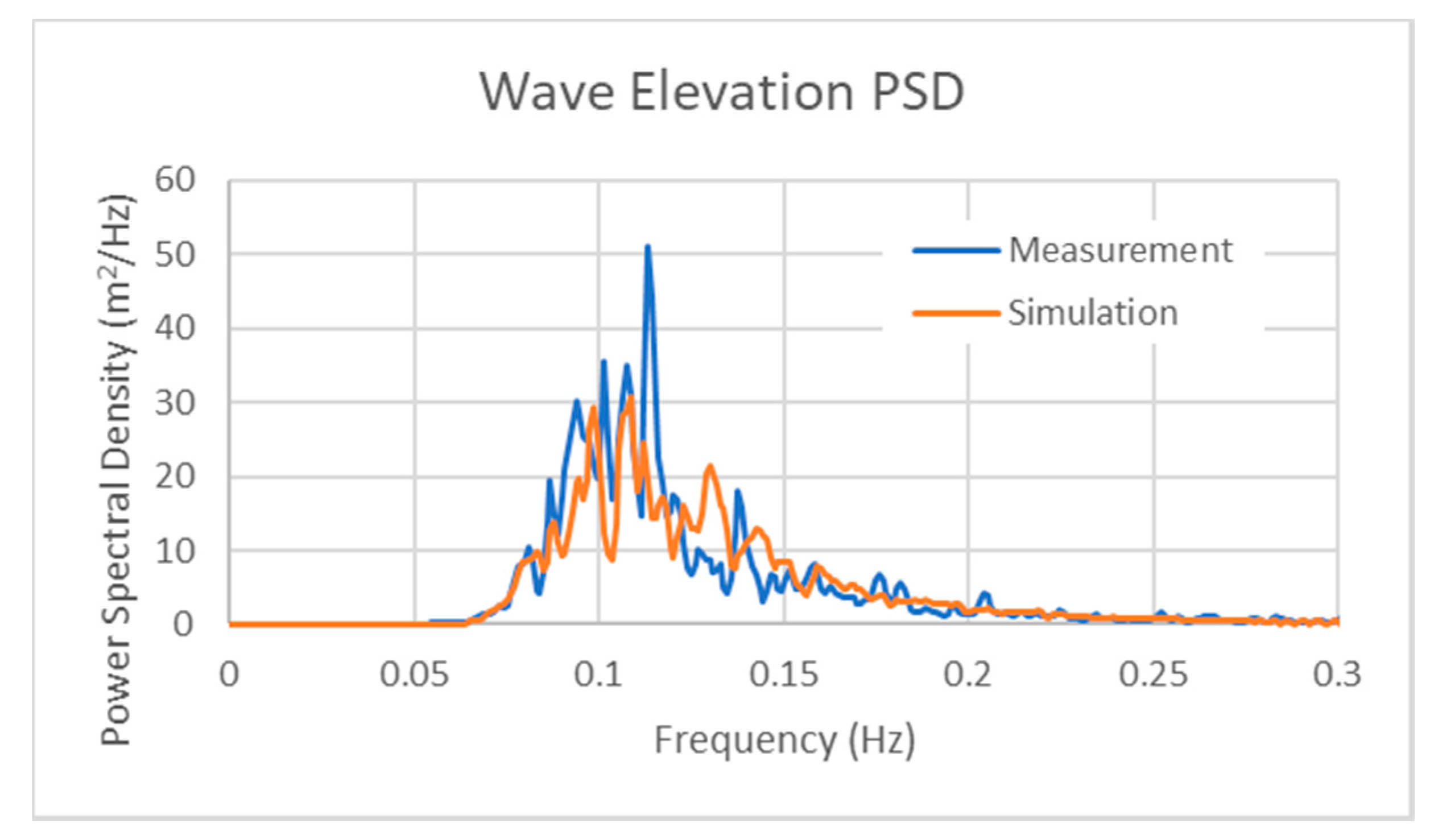
5.1. Power Spectral Density
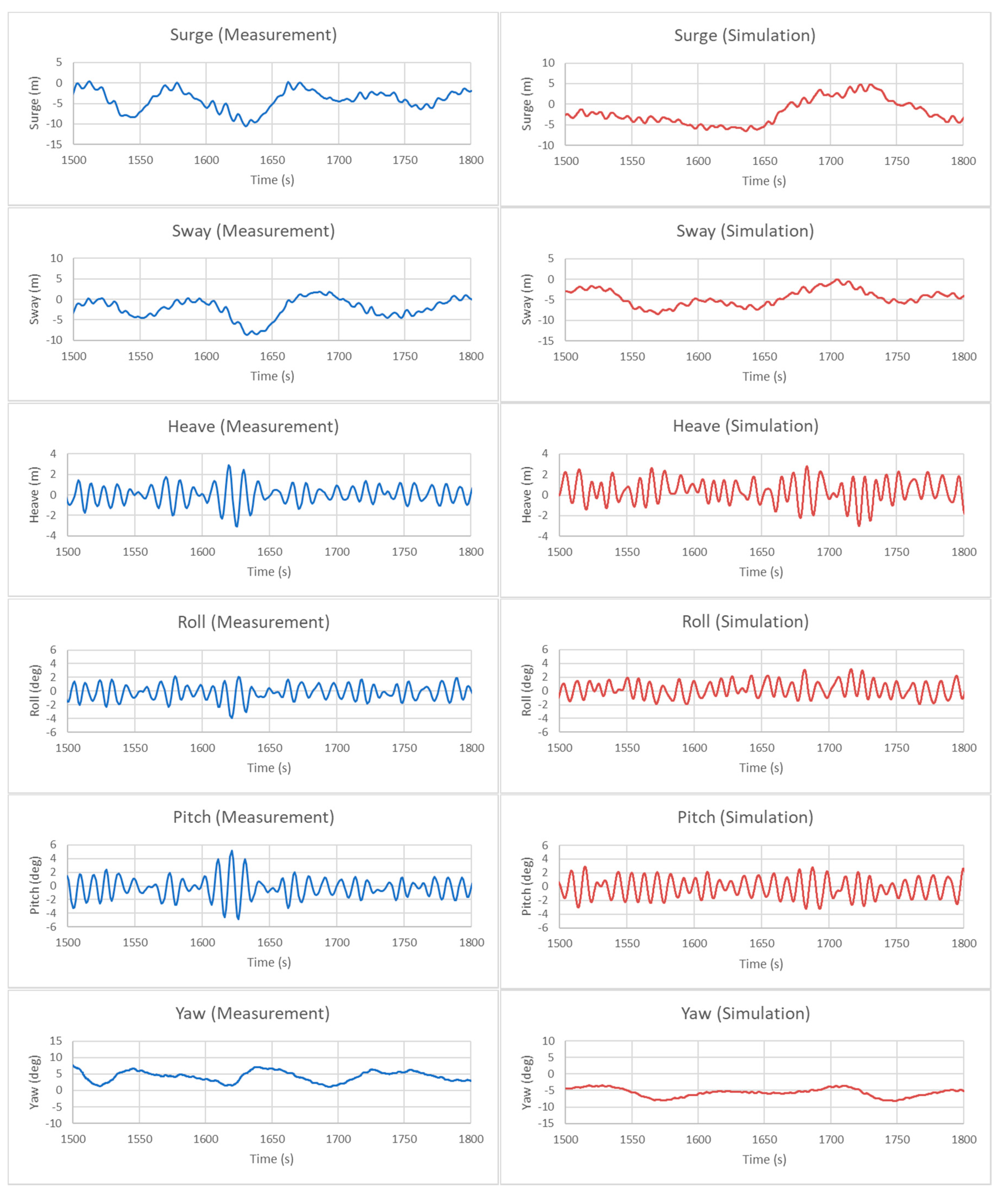
5.2. Sample Time Series During the Typhoon
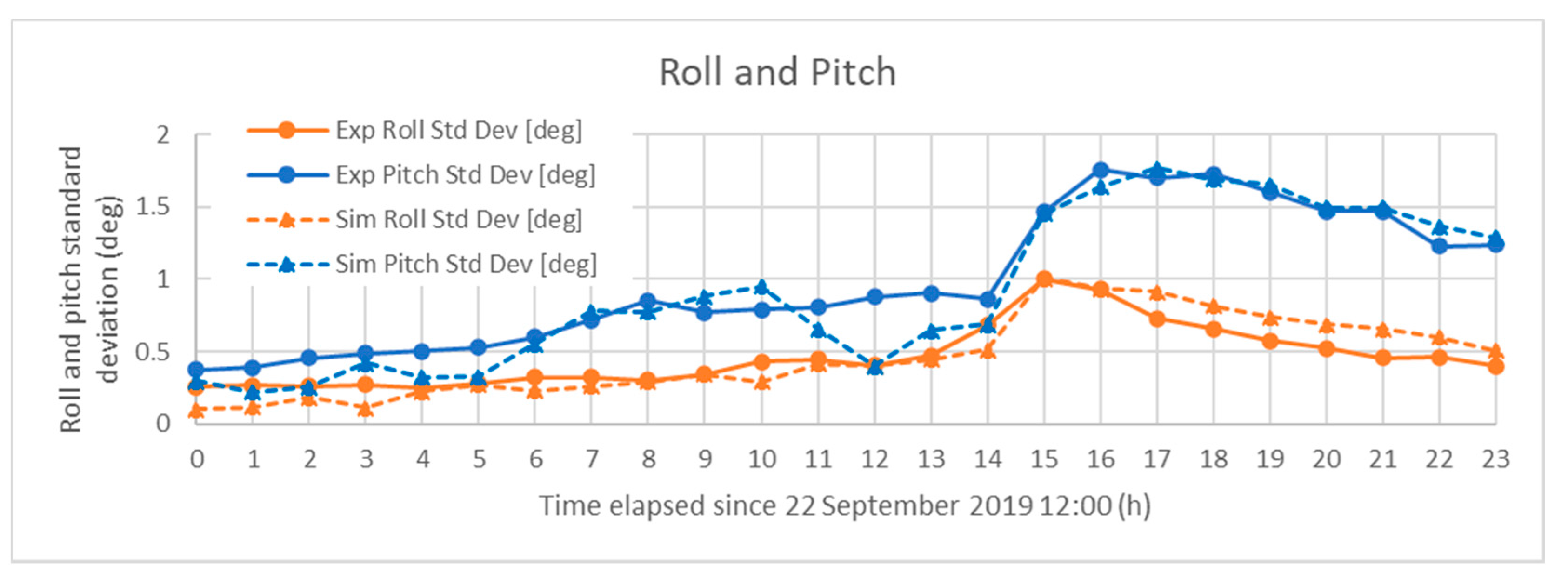
5.3. Hourly Statistical Motion Response of the Barge-type FOWT during 24 H of the Typhoon
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ishida, M. Renewable Energy Utilization Report No. 10, Japan’s First Commercial Operational Floating Offshore Wind Turbine; Renewable Energy Institute: Tokyo, Japan, 2017. (In Japanese) [Google Scholar]
- Suzuki, H. Fukushima Project and Floating Offshore Wind Turbine System. Bull. Jpn. Soc. Nav. Archit. Ocean Eng. 2018, 81, 32–33. (In Japanese) [Google Scholar]
- Imakita, A. 2 MW Floating Offshore Wind Turbine Facility Fukushima Mirai. Bull. Jpn. Soc. Nav. Archit. Ocean Eng. 2018, 81, 34–37. (In Japanese) [Google Scholar]
- Komatsu, M.; Hitoshi, K.; Ohta, M.; Hiroshi, T.; Mori, H.; Miyazaki, S. Development of Offshore Wind Turbine Floater That Blends Into Japanese Waters; Evaluation of the Validity for Design and Applied Methods for V-shaped Semi-Submersible Floating Structure. Mitsubishi Heavy Ind. Tech. Rev. 2016, 53, 30–39. [Google Scholar]
- Kitakoji, Y. The Construction of Floating Transformer (Fukushima Kizuna) and 5 MW Floating Offshore Wind Turbine (Fukushima Hamakaze) Advanced Spar-type Floating Structure. Bull. Jpn. Soc. Nav. Archit. Ocean Eng. 2018, 81, 44–47. (In Japanese) [Google Scholar]
- Jonkman, J.M.; Buhl, M.L., Jr. Loads Analysis of a Floating Offshore Wind Turbine Using Fully Coupled Simulation. In Proceedings of the Wind Power 2007 Conference and Exhibition, Los Angeles, CA, USA, 3–6 June 2007. [Google Scholar]
- Beyer, F.; Choisnet, T.; Kretschmer, M.; Cheng, P.W. Coupled MBS-CFD Simulation of the IDEOL Floating Offshore Wind Turbine Foundation Compared to Wave Tank Model Test Data. In Proceedings of the 25th International Offshore and Polar Engineering Conference (ISOPE-2015), Hawaii, HI, USA, 21–26 June 2015. [Google Scholar]
- Vijay, K.G.; Karmakar, D.; Uzunoglu, E.; Soares, C.G. Performance of Barge-Type Floaters for Floating Wind Turbine. In Proceedings of the 2nd International Conference of Renewable Energies Offshore (Renew 2016), Lisbon, Portugal, 24–26 October 2016. [Google Scholar]
- Kosasih, K.M.A.; Niizato, H.; Okubo, S.; Mitani, S.; Suzuki, H. Wave Tank Experiment and Coupled Simulation Analysis of Barge-Type Offshore Wind Turbine. In Proceedings of the 29th International Society of Offshore and Polar Engineering Conference (ISOPE-2019), Hawaii, HI, USA, 16–21 June 2019. [Google Scholar]
- New Energy and Industrial Technology Development Organization. Floating Offshore Wind Turbine Technology Guidebook. Available online: https://www.nedo.go.jp/content/100891410.pdf (accessed on 25 September 2020). (In Japanese)
- Waris, M.B.; Ishihara, T. Dynamic Response Analysis of Floating Offshore Wind Turbine with Different Types of Heave Plates and Mooring Systems by Using a Fully Nonlinear Model. Coupled Syst. Mech. 2012, 1, 247–268. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated power | 3 MW |
| Rotor diameter | 100 m |
| Number of blades | 2 |
| Rotor orientation | Upwind |
| Hub height 1 | 72 m |
| Draught | 7.5 m |
| Floating support structure’s dimension (including skirt) | 51 m × 51 m ×10 m |
| Water depth | 53 m |
| Total mass (incl. ballast and mooring lines) | 9,858,000 kg |
| Parameter | Value |
|---|---|
| Line length | 522 m |
| Line type | Studless chain |
| Nominal diameter | 132 mm |
| Weight in air | 0.349 t/m |
| Minimum Breaking Load | 15,965 kN |
| Parameter | Value |
|---|---|
| Wind turbine maker | Aerodyn Engineering GmbH |
| Wind turbine type | SCD3MW–NEDO |
| Rated power | 3 MW |
| Rotor diameter | 100 m |
| Hub height 1 | 72 m |
| Number of blades | 2 blades |
| Rotor orientation | Upwind |
| Tilt angle | 3° |
| Coning angle | 5° |
| Control scheme | Variable speed, individual pitch controlled |
| Cut-in wind speed | 3 m/s |
| Cut-out wind speed | 25 m/s |
| Rated rotor speed | 17.1 rpm |
| RNA mass | 133,000 kg |
| Measurement Item | Instrument Used (Location) |
|---|---|
| Wind speed | Cup anemometer (72 m above SWL) |
| Wind direction | Wind vane (72 m above SWL) |
| Wave height, period, and direction | Ultrasonic wave meter (120 m west of FOWT) |
| Surge motion | RTK-GPS 1 (FOWT’s starboard side deck) |
| Sway motion | RTK-GPS 1 (FOWT’s starboard side deck) |
| Heave motion | RTK-GPS 1 (FOWT’s starboard side deck) |
| Roll | Fiber-Optic Gyroscope (inside transition piece) |
| Pitch | Fiber-Optic Gyroscope (inside transition piece) |
| Yaw | Compass (FOWT’s starboard side deck) |
| Time | Mean Wind Speed [m/s] | Wind Direction 1 [°] | Turbulence Intensity [%] | Significant Wave Height [m] | Significant Wave Period [s] | Wave Direction 1 [°] |
|---|---|---|---|---|---|---|
| 22-Sep-19, 12 h | 20.13 | 126.6 | 8.6% | 1.33 | 6.06 | 14.3 |
| 22-Sep-19, 13 h | 21.18 | 128.6 | 7.8% | 1.31 | 5.86 | 30.9 |
| 22-Sep-19, 14 h | 19.63 | 132.3 | 11.4% | 1.34 | 6.11 | 42.0 |
| 22-Sep-19, 15 h | 21.45 | 127.4 | 13.1% | 1.31 | 6.50 | 1.0 |
| 22-Sep-19, 16 h | 23.10 | 126.3 | 6.5% | 1.42 | 6.35 | 42.3 |
| 22-Sep-19, 17 h | 24.43 | 129.0 | 5.4% | 1.52 | 6.42 | 50.7 |
| 22-Sep-19, 18 h | 22.67 | 135.4 | 7.7% | 1.51 | 7.02 | 21.3 |
| 22-Sep-19, 19 h | 21.05 | 140.8 | 8.0% | 1.66 | 7.97 | 4.0 |
| 22-Sep-19, 20 h | 24.44 | 145.1 | 7.9% | 1.96 | 7.61 | 14.7 |
| 22-Sep-19, 21 h | 20.42 | 159.0 | 12.9% | 2.00 | 7.98 | 14.7 |
| 22-Sep-19, 22 h | 23.21 | 187.1 | 17.2% | 1.98 | 8.18 | 2.0 |
| 22-Sep-19, 23 h | 24.57 | 200.1 | 11.0% | 2.19 | 7.05 | 323.4 |
| 23-Sep-19, 00 h | 24.44 | 212.4 | 11.0% | 2.13 | 6.46 | 301.2 |
| 23-Sep-19, 01 h | 20.72 | 272.9 | 14.4% | 2.21 | 7.08 | 318.0 |
| 23-Sep-19, 02 h | 22.80 | 325.9 | 9.9% | 2.65 | 6.92 | 318.3 |
| 23-Sep-19, 03 h | 22.76 | 336.2 | 9.2% | 4.69 | 8.75 | 322.3 |
| 23-Sep-19, 04 h | 21.10 | 343.1 | 10.9% | 4.93 | 9.11 | 332.0 |
| 23-Sep-19, 05 h | 17.34 | 347.0 | 14.6% | 4.83 | 9.43 | 336.7 |
| 23-Sep-19, 06 h | 16.28 | 348.9 | 14.1% | 4.85 | 9.39 | 338.3 |
| 23-Sep-19, 07 h | 14.77 | 349.2 | 13.8% | 4.20 | 9.29 | 340.0 |
| 23-Sep-19, 08 h | 13.47 | 358.8 | 12.8% | 3.91 | 9.59 | 340.3 |
| 23-Sep-19, 09 h | 11.91 | 8.1 | 12.3% | 3.64 | 9.68 | 341.3 |
| 23-Sep-19, 10 h | 11.03 | 11.6 | 17.3% | 3.28 | 9.33 | 340.3 |
| 23-Sep-19, 11 h | 11.52 | 13.6 | 11.4% | 3.01 | 9.20 | 345.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kosasih, K.M.A.; Suzuki, H.; Niizato, H.; Okubo, S. Demonstration Experiment and Numerical Simulation Analysis of Full-Scale Barge-Type Floating Offshore Wind Turbine. J. Mar. Sci. Eng. 2020, 8, 880. https://doi.org/10.3390/jmse8110880
Kosasih KMA, Suzuki H, Niizato H, Okubo S. Demonstration Experiment and Numerical Simulation Analysis of Full-Scale Barge-Type Floating Offshore Wind Turbine. Journal of Marine Science and Engineering. 2020; 8(11):880. https://doi.org/10.3390/jmse8110880
Chicago/Turabian StyleKosasih, Ko Matias Adrian, Hideyuki Suzuki, Hideyuki Niizato, and Shigeki Okubo. 2020. "Demonstration Experiment and Numerical Simulation Analysis of Full-Scale Barge-Type Floating Offshore Wind Turbine" Journal of Marine Science and Engineering 8, no. 11: 880. https://doi.org/10.3390/jmse8110880