Noise Characteristics Analysis of the Horizontal Axis Hydrokinetic Turbine Designed for Unmanned Underwater Mooring Platforms


Abstract
:1. Introduction
2. Description of the HAHT
3. Numerical Model
3.1. Governing Equations
3.1.1. LES Formulation
3.1.2. Acoustic Simulation FW–H Equation
3.2. Computation Domains and Grid Generation
3.3. Solution Sets
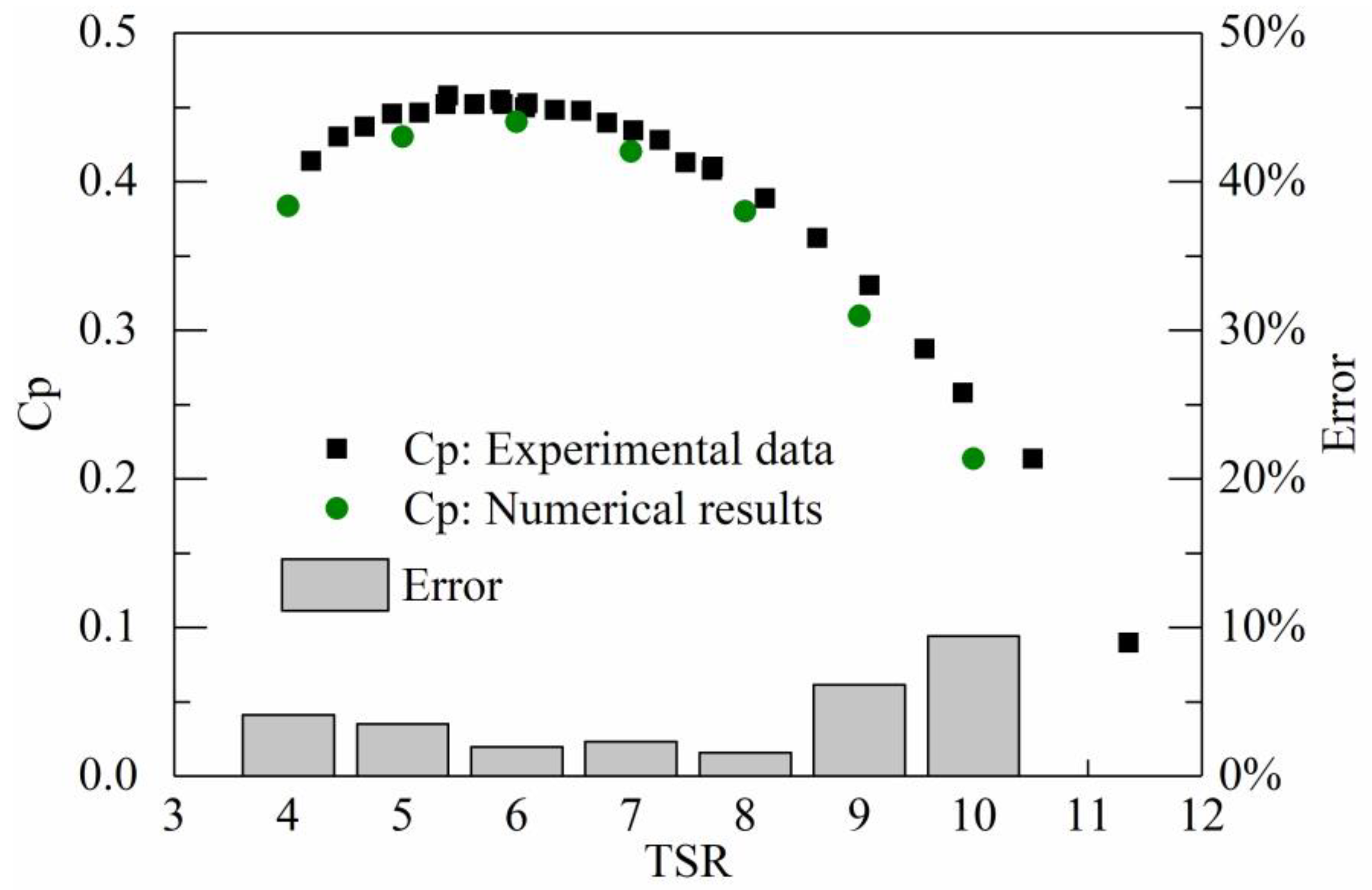
4. Numerical Method Verification and Validation
5. Results and discussions
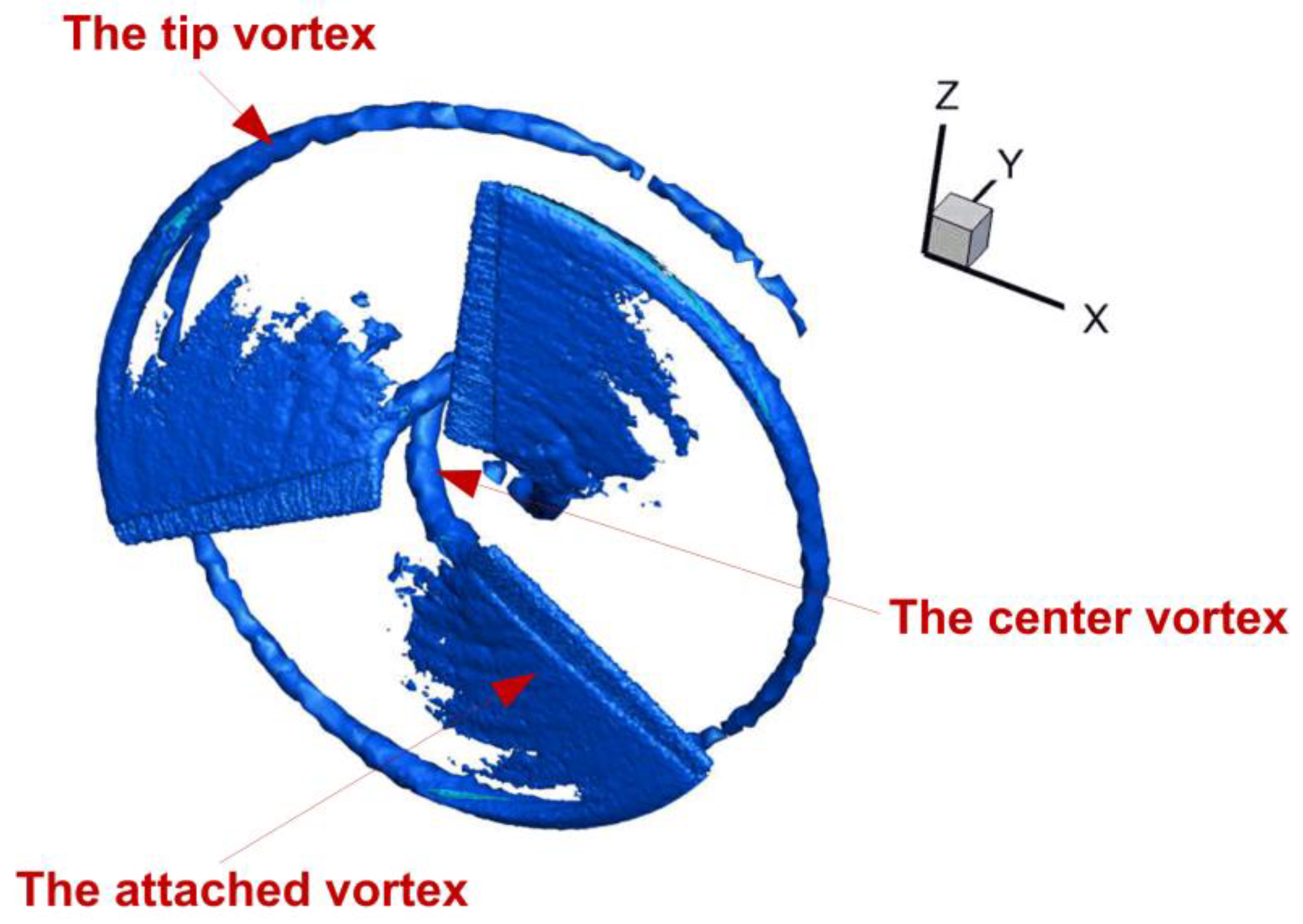
5.1. Flow Field Characteristics
5.2. Noise Characteristics Around a Single Blade
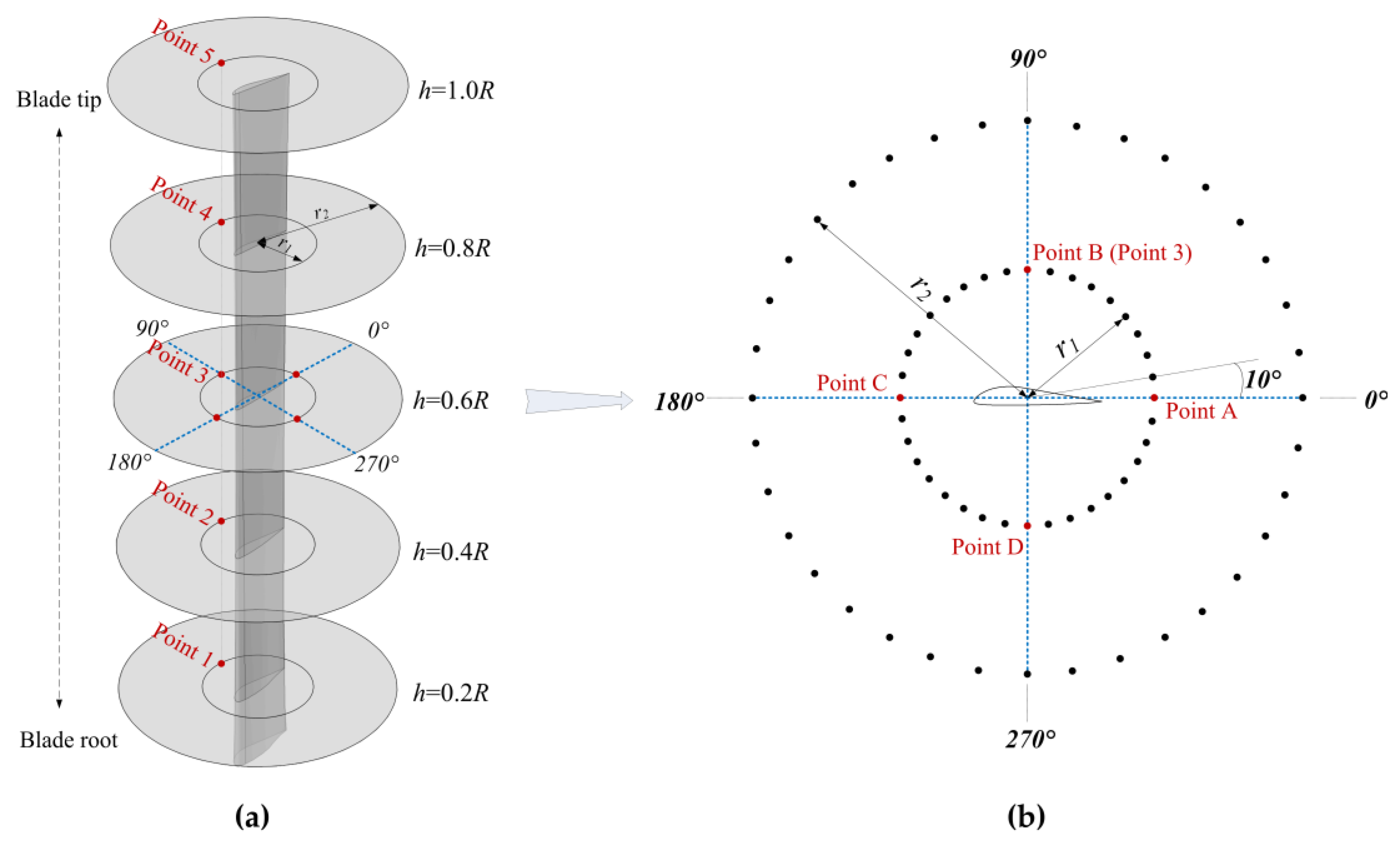
5.2.1. Arrangement of Noise Observation Location
5.2.2. Results and Discussions of Noise Characteristics
5.3. Noise Characteristics Around the Whole Turbine
5.3.1. Arrangement of Noise Observation Location
5.3.2. Results and Discussions of Noise Characteristics
6. Conclusions
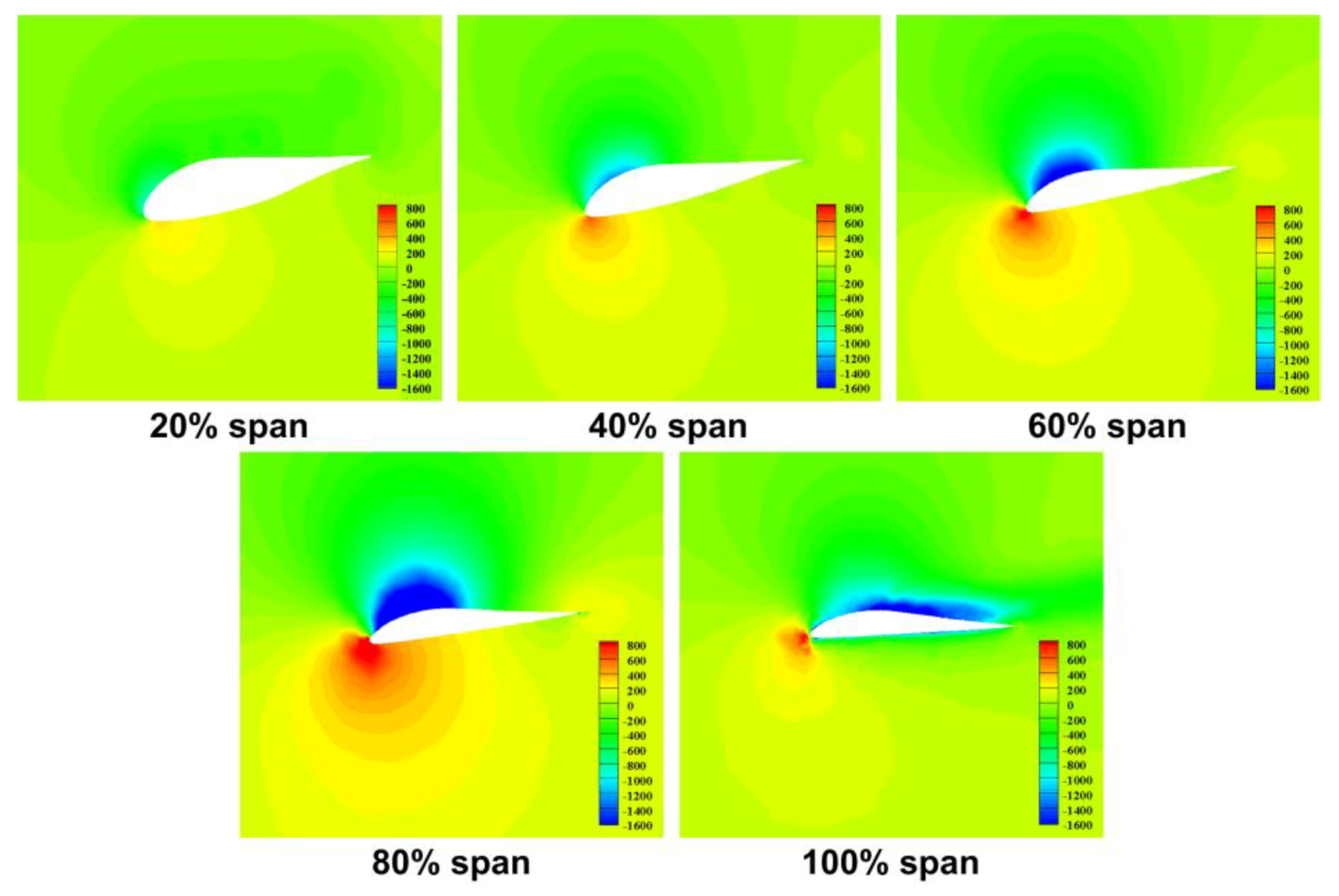
- (1)
- Along the spanwise direction of the blade, the pressure fluctuations are gradually becoming serious, with the increase of spanwise length from 20% span to 80% span. What is more, it is noticeable that the pressure fluctuations are concentrated in the region of the leading edge of the airfoil and the suction surface of the airfoil. With the increase in spanwise length, the negative pressure region gradually moves from the leading edge to the trailing edge on the suction pressure surface.
- (2)
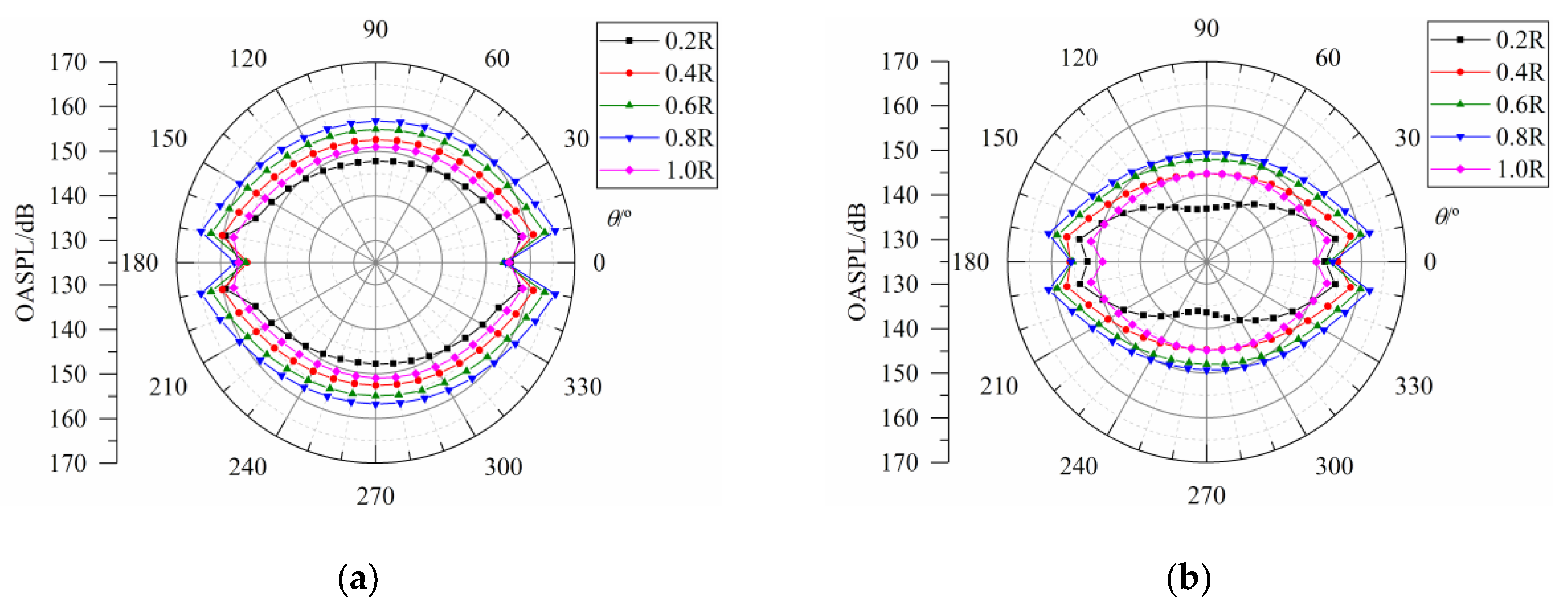
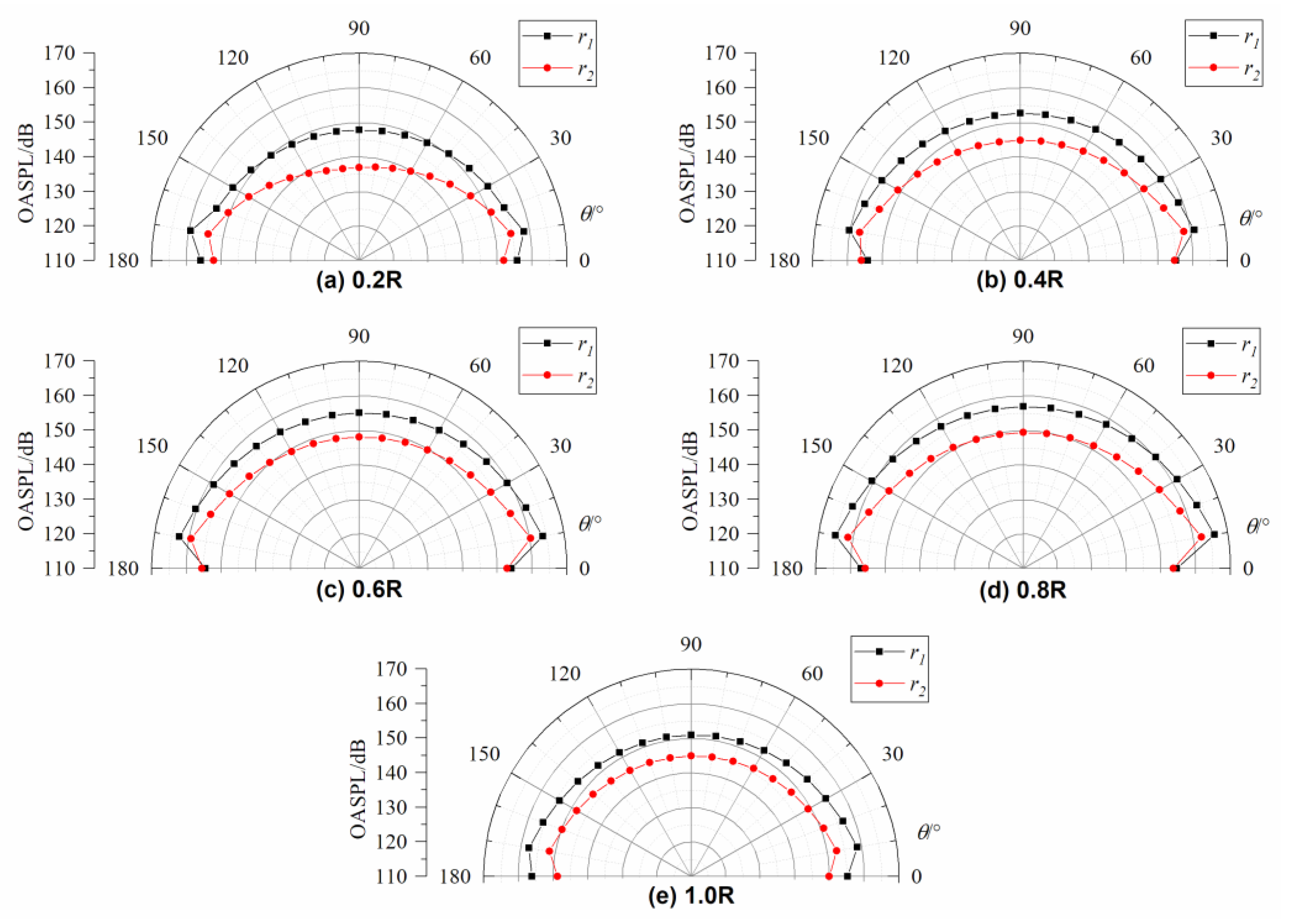
- From the OASPL directionality around a single blade, it can be seen that the overall noise level of the spanwise location of 0.8 R has largest OASPL than that of the other spanwise locations in general, which is in accordance with the results of the flow field characteristics near the blade region. The sound spectra are slightly different among the different observing directions at the same spanwise location, and the observing location along the spanwise direction affects the noise spectra characteristics to a very great extent.
- (3)
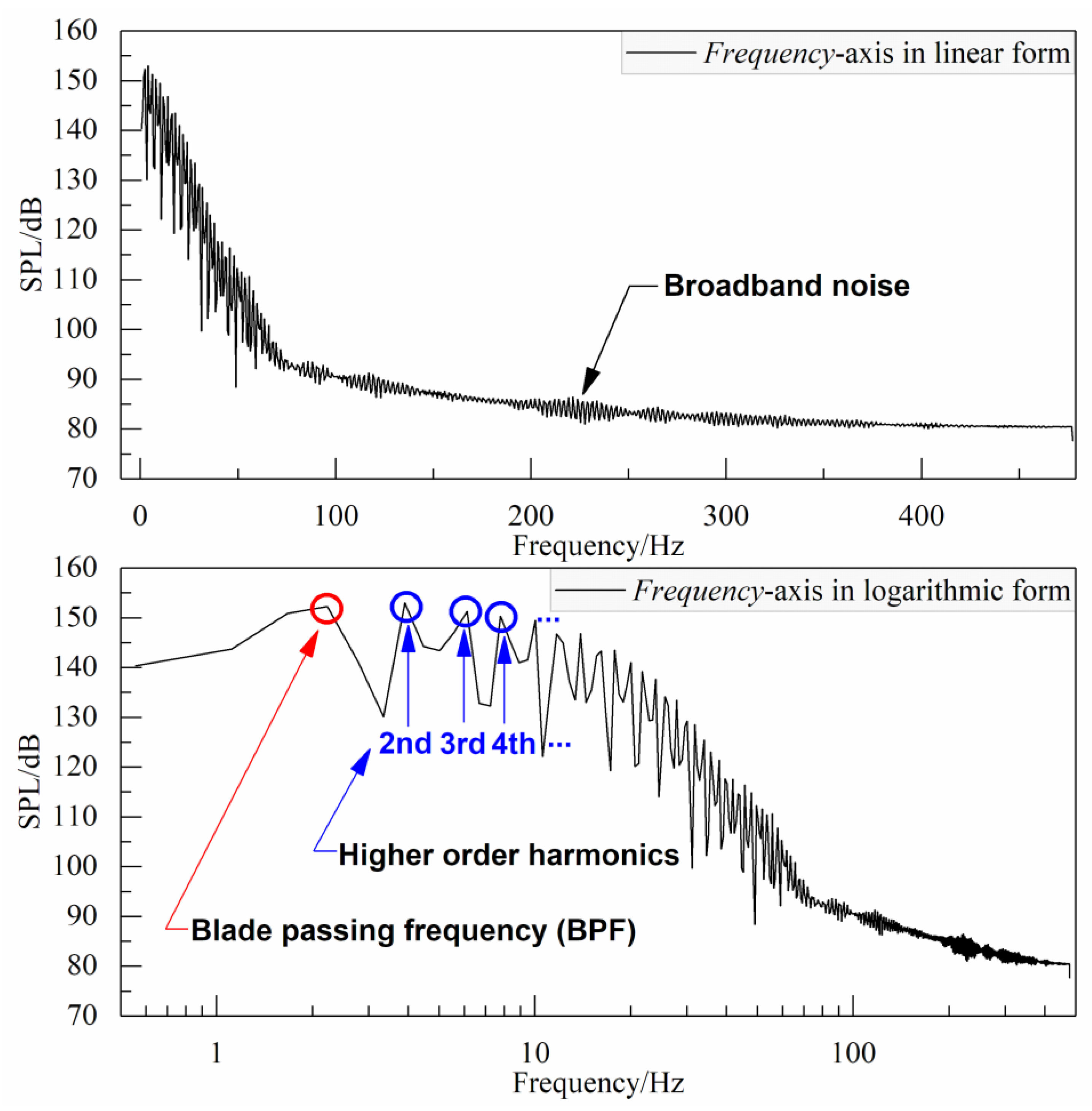
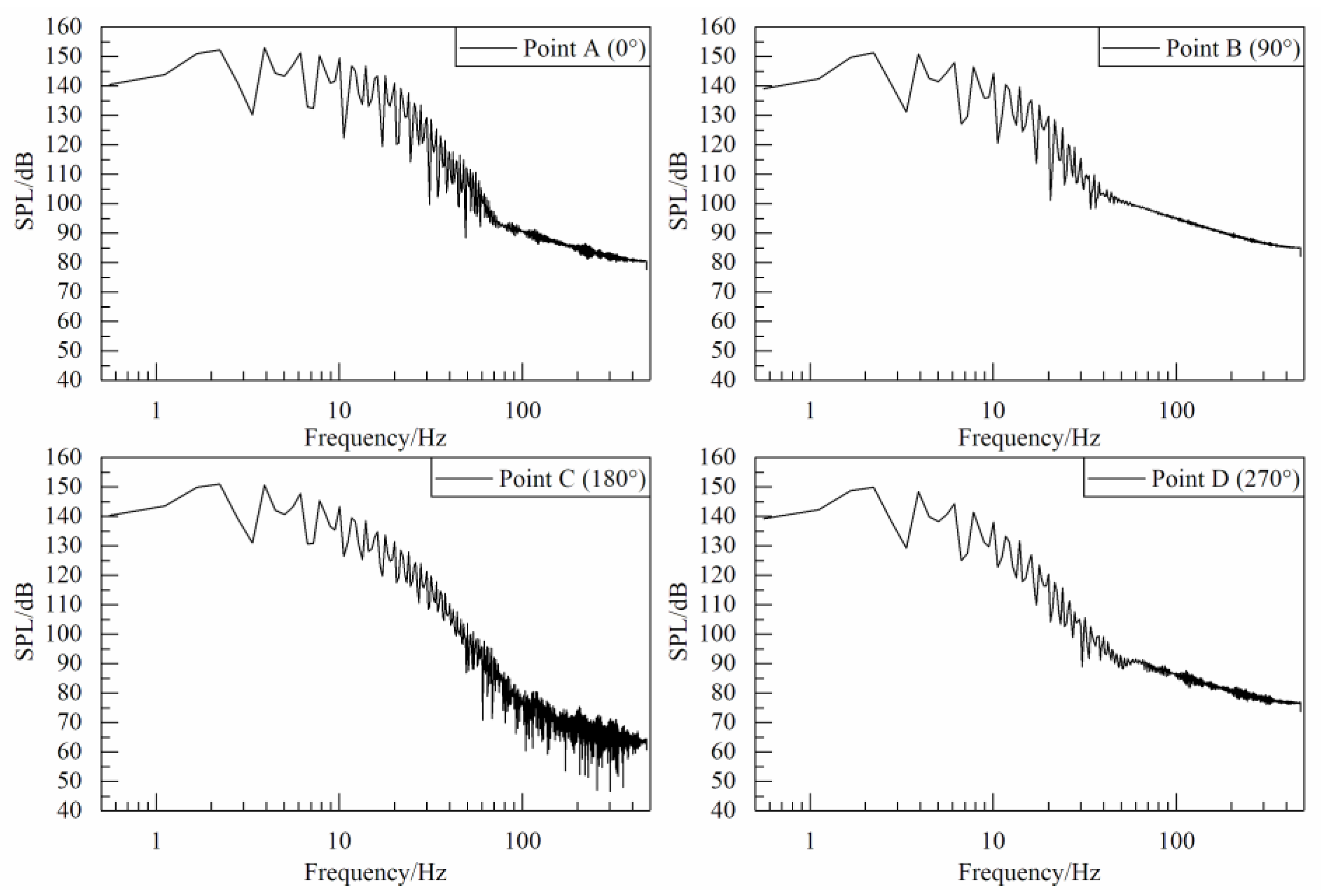
- The investigation of the noise around the whole turbine indicates that the dipole noise source dominates the sound sources in the current analysis. The noise is more likely to transmit along the flow direction (y-axis in this paper) than the other directions. Furthermore, the cumulative sum of the sound power spectrum of the noise observing points along the x-axis and y-axis show the change relationship clearly.
Author Contributions
Funding
Conflicts of Interest
References
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. SLOCUM: An underwater glider propelled by environmental energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Crimmins, D.M.; Patty, C.T.; Beliard, M.A.; Baker, J.; Jalbert, J.C.; Komerska, R.J.; Chappell, S.G.; Blidberg, D.R. Long-endurance test results of the solar-powered AUV system. In Proceedings of the IEEE Oceans, Boston, MA, USA, 18–21 September 2006; pp. 1–5. [Google Scholar]
- Hine, R.; Willcox, S.; Hine, G.; Richardson, T. The wave glider: A wave-powered autonomous marine vehicle. In Proceedings of the IEEE Oceans, Biloxi, MS, USA, 26–29 October 2009; pp. 1–6. [Google Scholar]
- Tian, W.; Song, B.; Mao, Z. Conceptual design and numerical simulations of a vertical axis water turbine used for underwater mooring platforms. Int. J. Nav. Arch. Ocean 2013, 5, 625–634. [Google Scholar]
- Tian, W.; Song, B.; VanZwieten, J.H.; Pyakurel, P.; Li, Y. Numerical simulations of a horizontal axis water turbine designed for underwater mooring platforms. Int. J. Nav. Arch. Ocean 2016, 8, 73–82. [Google Scholar] [CrossRef] [Green Version]
- Sood, M.; Singal, S.K. Development of hydrokinetic energy technology: A review. Int. J. Energy Res. 2019, 43, 5552–5571. [Google Scholar] [CrossRef]
- Tian, W.; VanZwieten, J.H.; Pyakurel, P.; Li, Y. Influences of yaw angle and turbulence intensity on the performance of a 20 kW in-stream hydrokinetic turbine. Energy 2016, 111, 104–116. [Google Scholar] [CrossRef] [Green Version]
- Tian, W.; Mao, Z.; Ding, H. Design, test and numerical simulation of a low-speed horizontal axis hydrokinetic turbine. Int. J. Nav. Arch. Ocean 2018, 10, 782–793. [Google Scholar] [CrossRef]
- Salvatore, F.; Sarichloo, Z.; Calcagni, D. Marine turbine hydrodynamics by a boundary element method with viscous flow correction. J. Mar. Sci. Eng. 2018, 6, 53. [Google Scholar] [CrossRef] [Green Version]
- Knight, B.; Freda, R.; Young, Y.; Maki, K. Coupling numerical methods and analytical models for ducted turbines to evaluate designs. J. Mar. Sci. Eng. 2018, 6, 43. [Google Scholar] [CrossRef] [Green Version]
- Struthers, D.P.; Gutowsky, L.F.; Enders, E.; Smokorowski, K.; Watkinson, D.; Bibeau, E.; Cooke, S.J. Evaluating riverine hydrokinetic turbine operations relative to the spatial ecology of wild fishes. J. Ecohydraul. 2017, 2, 53–67. [Google Scholar] [CrossRef]
- Piper, A.T.; Rosewarne, P.J.; Wright, R.M.; Kemp, P.S. The impact of an Archimedes screw hydropower turbine on fish migration in a lowland river. Ecol. Eng. 2018, 118, 31–42. [Google Scholar] [CrossRef]
- Schuchert, P.; Kregting, L.; Pritchard, D.; Savidge, G.; Elsäßer, B. Using coupled hydrodynamic biogeochemical models to predict the effects of tidal turbine arrays on phytoplankton dynamics. J. Mar. Sci. Eng. 2018, 6, 58. [Google Scholar] [CrossRef] [Green Version]
- Hafla, E.; Johnson, E.; Johnson, C.N.; Preston, L.; Aldridge, D.; Roberts, J.D. Modeling underwater noise propagation from marine hydrokinetic power devices through a time-domain, velocity-pressure solution. J. Acoust. Soc. Am. 2018, 143, 3242–3253. [Google Scholar] [CrossRef] [PubMed]
- Lossent, J.; Lejart, M.; Folegot, T.; Clorennec, D.; Di Iorio, L.; Gervaise, C. Underwater operational noise level emitted by a tidal current turbine and its potential impact on marine fauna. Mar. Pollut. Bull. 2018, 131, 323–334. [Google Scholar] [CrossRef] [PubMed]
- Pine, M.K.; Schmitt, P.; Culloch, R.M.; Lieber, L.; Kregting, L.T. Providing ecological context to anthropogenic subsea noise: Assessing listening space reductions of marine mammals from tidal energy devices. Renew. Sust. Energy Rev. 2019, 103, 49–57. [Google Scholar] [CrossRef] [Green Version]
- Shigetomi, A.; Murai, Y.; Tasaka, Y.; Takeda, Y. Interactive flow field around two Savonius turbines. Renew. Energy 2011, 36, 536–545. [Google Scholar] [CrossRef]
- Dang, Z.; Mao, Z.; Tian, W. Reduction of hydrodynamic noise of 3D hydrofoil with spanwise microgrooved surfaces inspired by sharkskin. J. Mar. Sci. Eng. 2019, 7, 136. [Google Scholar] [CrossRef] [Green Version]
- Gallo, P.; Fredianelli, L.; Palazzuoli, D.; Licitra, G.; Fidecaro, F. A procedure for the assessment of wind turbine noise. Appl. Acoust. 2016, 114, 213–217. [Google Scholar] [CrossRef]
- Fredianelli, L.; Gallo, P.; Licitra, G.; Carpita, S. Analytical assessment of wind turbine noise impact at receiver by means of residual noise determination without the wind farm shutdown. Noise Control Eng. J. 2017, 65, 417–433. [Google Scholar] [CrossRef]
- Jung, S.S.; Cheong, C.; Shin, S.H.; Cheung, W.S. Experimental identification of acoustic emission characteristics of large wind turbines with emphasis on infrasound and low-frequency noise. J. Korean Phys. Soc. 2008, 53, 1897–1905. [Google Scholar] [CrossRef]
- Doolan, C. A review of wind turbine noise perception, annoyance and low frequency emission. Wind Eng. 2013, 37, 97–104. [Google Scholar] [CrossRef]
- Leloudas, G.; Zhu, W.J.; Sørensen, J.N.; Shen, W.Z.; Hjort, S. Prediction and reduction of noise from a 2.3 MW wind turbine. J. Phys. Conf. Ser. 2007, 75, 012083. [Google Scholar] [CrossRef]
- Ghasemian, M.; Nejat, A. Aero-acoustics prediction of a vertical axis wind turbine using Large Eddy Simulation and acoustic analogy. Energy 2015, 88, 711–717. [Google Scholar] [CrossRef]
- UIUC Airfoil Coordinates Database. Available online: https://m-selig.ae.illinois.edu/ads/coord_database.html (accessed on 31 October 2019).
- Hinze, J.O. Turbulence; McGraw-Hill Inc.: New York, NY, USA, 1975. [Google Scholar]
- Lighthill, M.J. On sound generated aerodynamically I. General theory. Proc. R. Soc. Lond. Ser. A 1952, 211, 564–587. [Google Scholar]
- Williams, J.F.; Hawkings, D.L. Theory relating to the noise of rotating machinery. J. Sound Vib. 1969, 10, 10–21. [Google Scholar] [CrossRef]
- ANSYS. ANSYS FLUENT Theory Guide; ANSYS Inc.: Canonsburg, PA, USA, 2011. [Google Scholar]
- Ffowcs, J.E.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. Philos. Trans. R. Soc. A Math. Phys. Sci. 1969, 264, 321–342. [Google Scholar]
- Farassat, F. Derivation of Formulations 1 and 1A of Farassat; NASA Technical Report TM-2007-214853; NASA Langley Research Center: Hampton, VA, USA, 2007.
- Wang, S.; Yuan, P.; Li, D.; Jiao, Y. An overview of ocean renewable energy in China. Renew. Sust. Energy Rev. 2011, 15, 91–111. [Google Scholar] [CrossRef]
- Bahaj, A.S.; Molland, A.F.; Chaplin, J.R.; Batten, W.M.J. Power and thrust measurements of marine current turbines under various hydrodynamic flow conditions in a cavitation tunnel and a towing tank. Renew. Energy 2007, 32, 407–426. [Google Scholar] [CrossRef]
- Wang, C. Noise Source Analysis and Control for Small Axial-Flow Fans. Ph.D. Thesis, The University of Hong Kong, Hong Kong, China, 2016. [Google Scholar]
- Wasala, S.H.; Storey, R.C.; Norris, S.E.; Cater, J.E. Aeroacoustic noise prediction for wind turbines using Large Eddy Simulation. J. Wind Eng. Ind. Aerod. 2015, 145, 17–29. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| r/R | r (m) | c (m) | t/c (%) | φ (deg) |
|---|---|---|---|---|
| 0.108 | 0.0648 | 0.0576 | 25.6 | 14.61 |
| 0.138 | 0.0828 | 0.0558 | 24.9 | 14.57 |
| 0.196 | 0.1176 | 0.0546 | 23.5 | 14.47 |
| 0.278 | 0.1668 | 0.0528 | 21.6 | 14.27 |
| 0.379 | 0.2274 | 0.0522 | 19.3 | 13.81 |
| 0.492 | 0.2952 | 0.0510 | 16.6 | 12.93 |
| 0.608 | 0.3648 | 0.0504 | 14.8 | 11.58 |
| 0.721 | 0.4326 | 0.0498 | 13.8 | 9.75 |
| 0.822 | 0.4932 | 0.0492 | 12.9 | 7.61 |
| 0.904 | 0.5424 | 0.0486 | 12.2 | 5.52 |
| 0.962 | 0.5772 | 0.0486 | 12.1 | 3.79 |
| 1.000 | 0.6000 | 0.0486 | 12.1 | 2.90 |
| Approx. Number of Grid Elements (million) | Torque/Nm | Cp |
|---|---|---|
| 9.33 | 6.6872 | 0.3949 |
| 12.76 | 6.7939 | 0.4012 |
| 15.81 | 6.7972 | 0.4014 |
| Description | Parameter and Value |
|---|---|
| Temperature | = 20 °C |
| Density | = 998.2 kg/m3 |
| Viscosity | = 0.001003 kg/(m·s) |
| Acoustic speed | = 1483 m/s |
| Reference sound pressure | = 1 × 10−6 Pa |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, Z.; Mao, Z.; Song, B.; Tian, W. Noise Characteristics Analysis of the Horizontal Axis Hydrokinetic Turbine Designed for Unmanned Underwater Mooring Platforms. J. Mar. Sci. Eng. 2019, 7, 465. https://doi.org/10.3390/jmse7120465
Dang Z, Mao Z, Song B, Tian W. Noise Characteristics Analysis of the Horizontal Axis Hydrokinetic Turbine Designed for Unmanned Underwater Mooring Platforms. Journal of Marine Science and Engineering. 2019; 7(12):465. https://doi.org/10.3390/jmse7120465
Chicago/Turabian StyleDang, Zhigao, Zhaoyong Mao, Baowei Song, and Wenlong Tian. 2019. "Noise Characteristics Analysis of the Horizontal Axis Hydrokinetic Turbine Designed for Unmanned Underwater Mooring Platforms" Journal of Marine Science and Engineering 7, no. 12: 465. https://doi.org/10.3390/jmse7120465