Determining the Horizontal and Vertical Water Velocity Components of a Turbulent Water Column Using the Motion Response of an Autonomous Underwater Vehicle


Abstract
:1. Introduction
2. Materials and Procedures
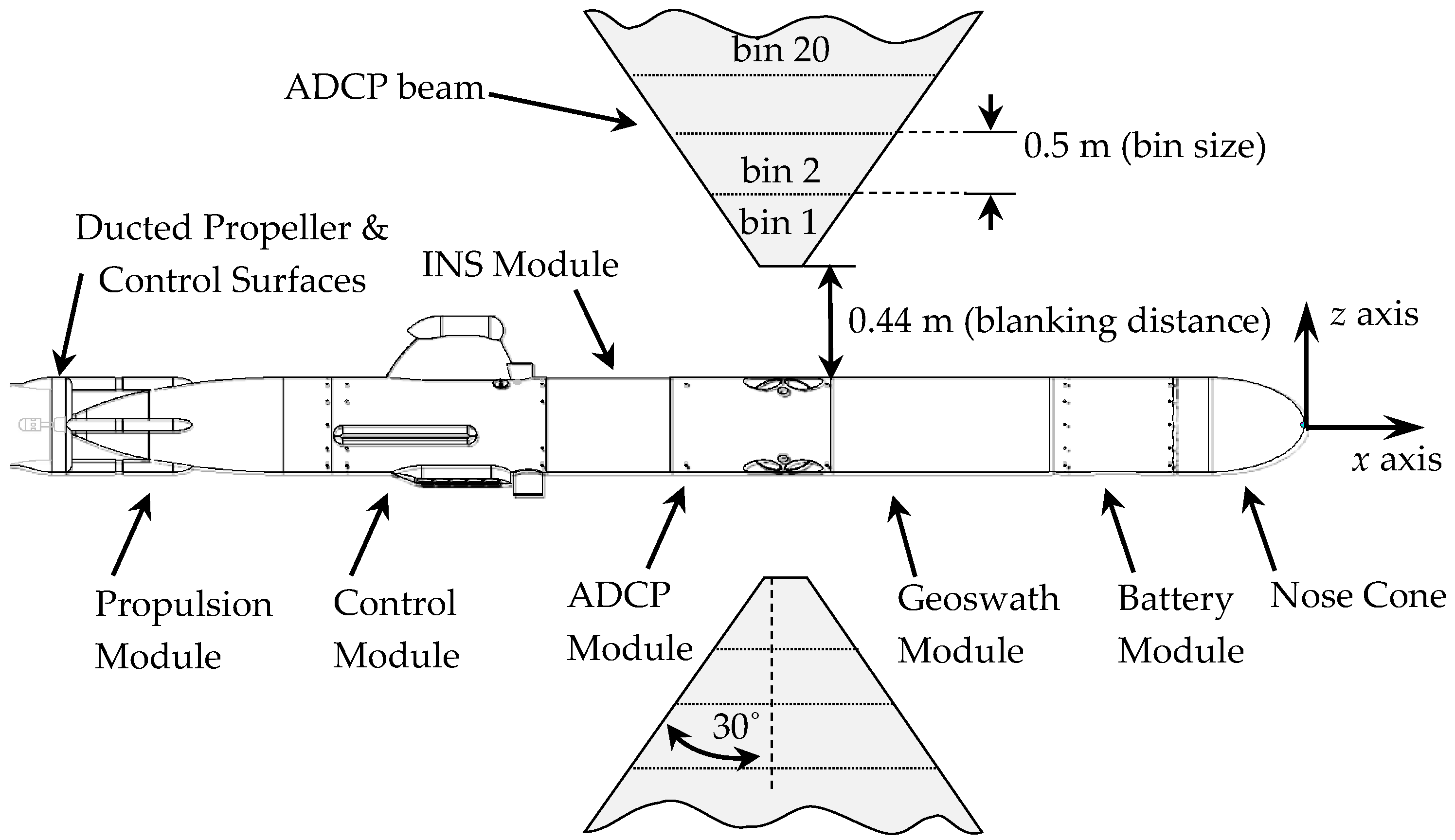
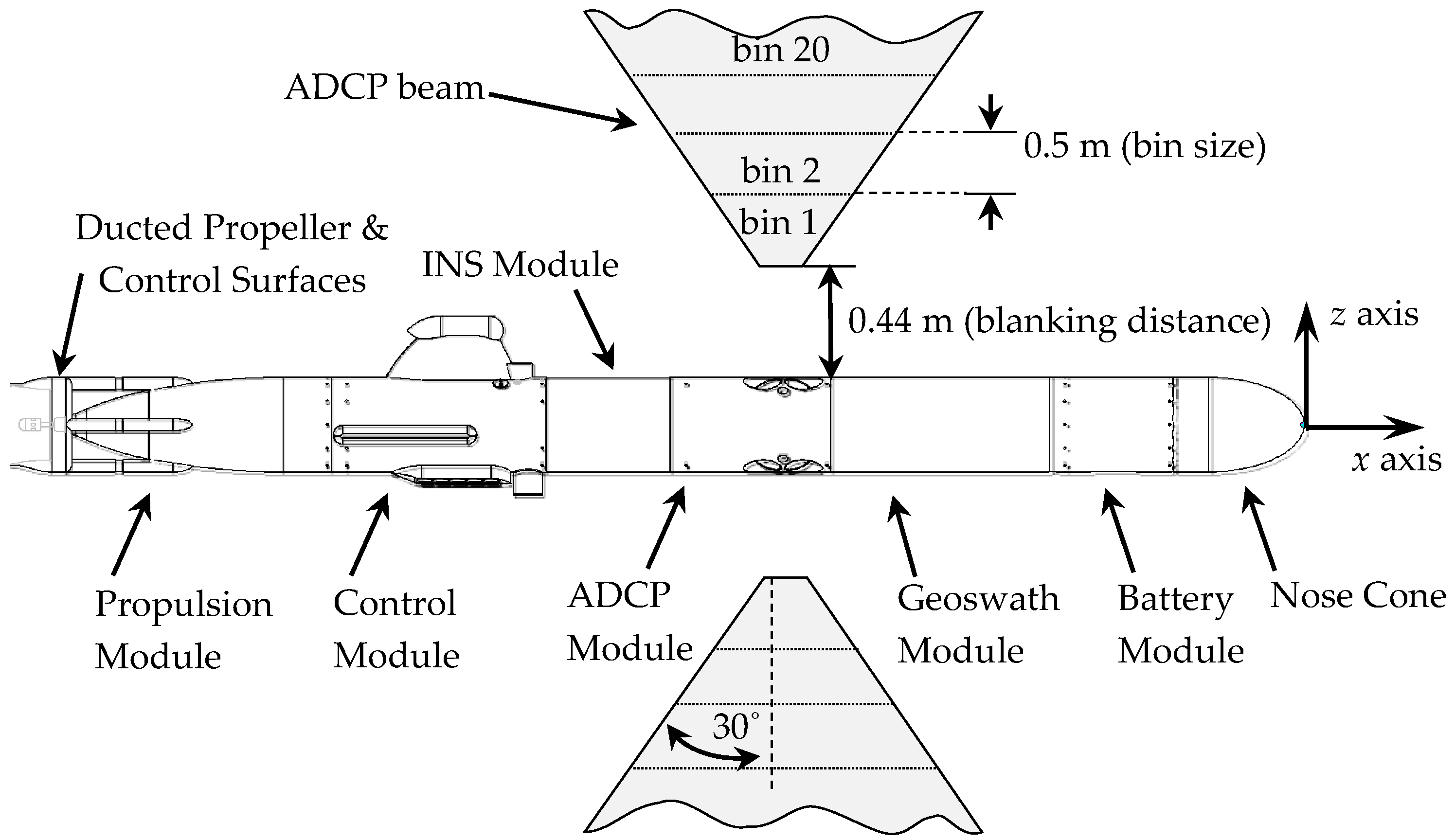
2.1. Instrumentation
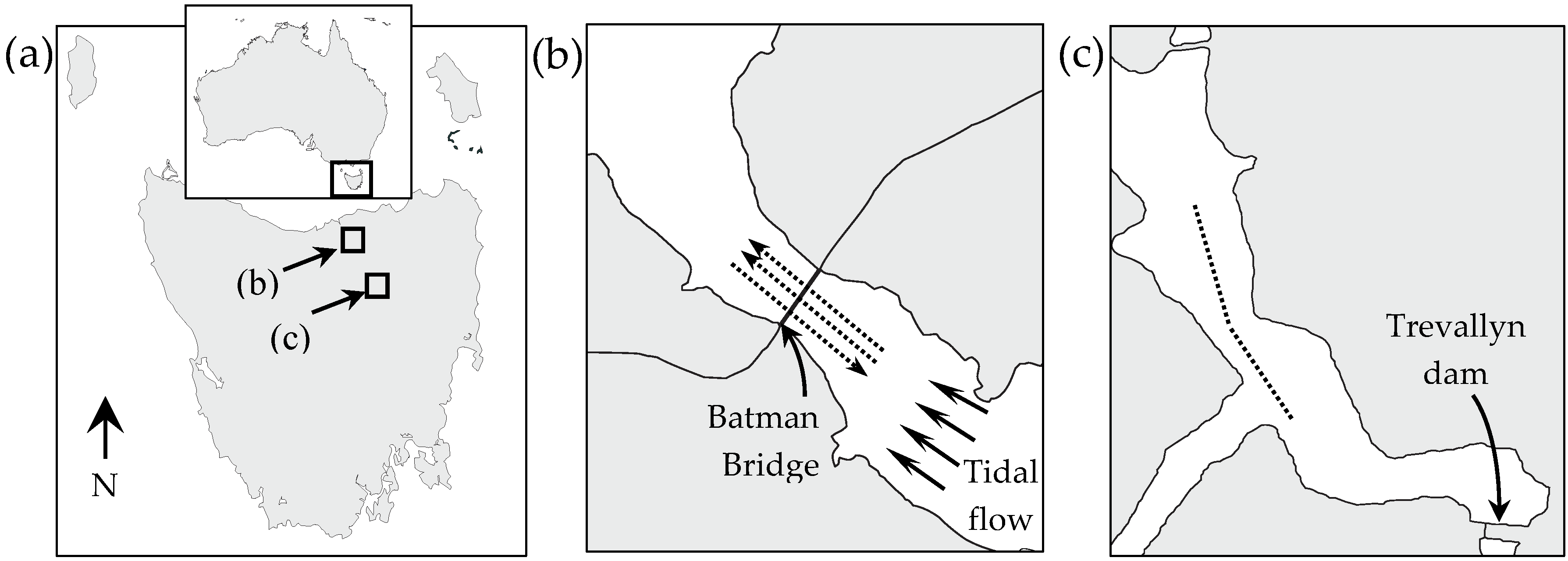
2.2. Site Description
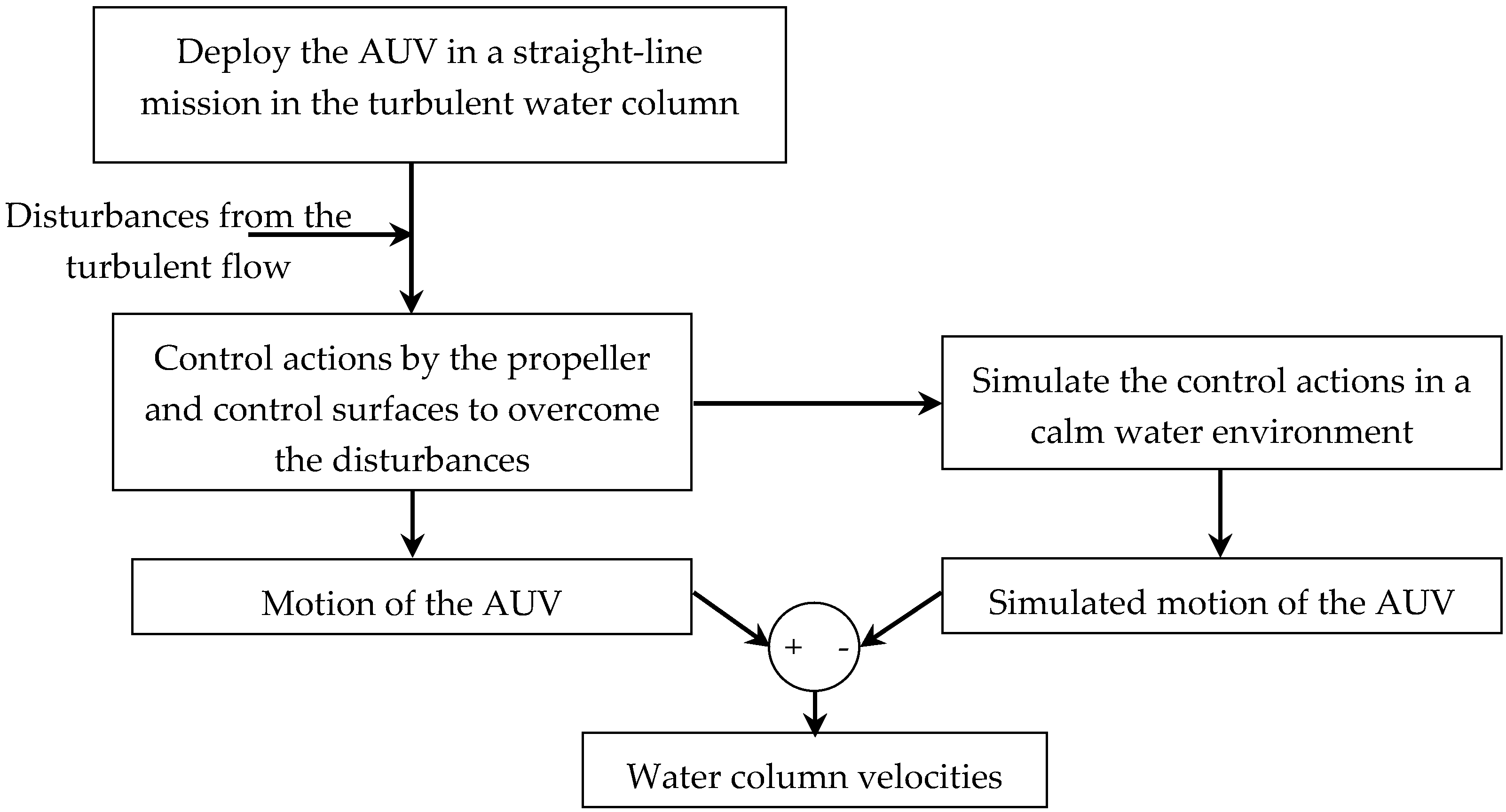
2.3. WVAM Method
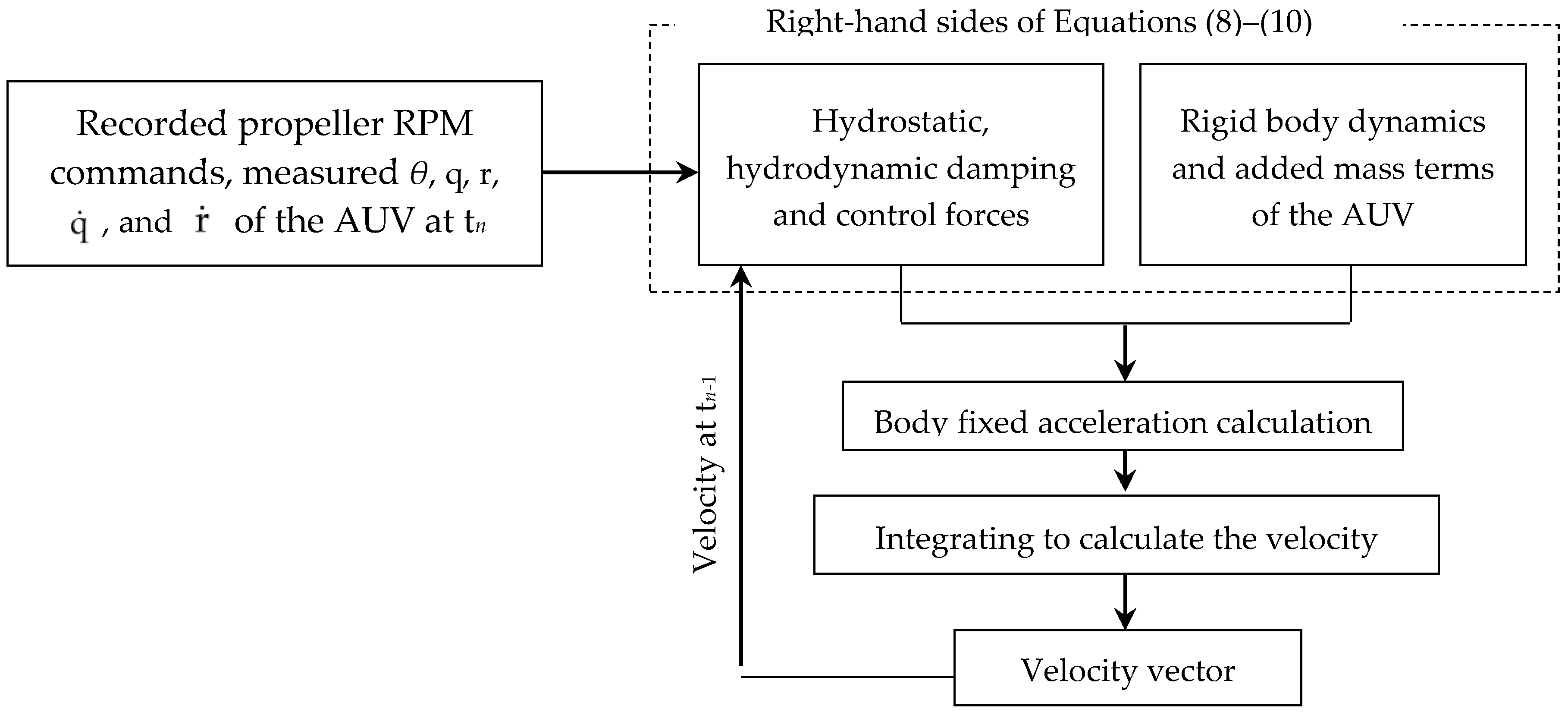
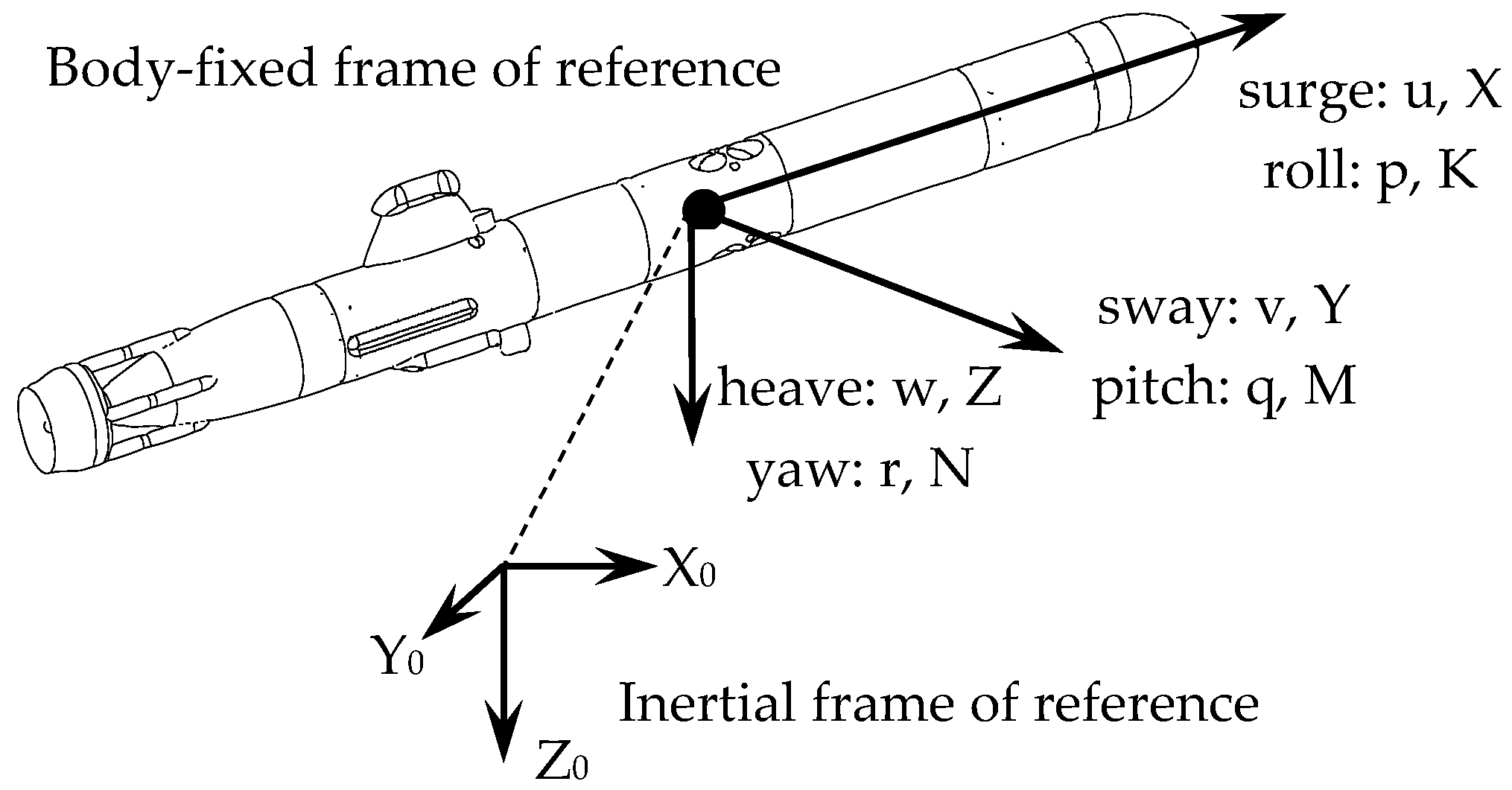
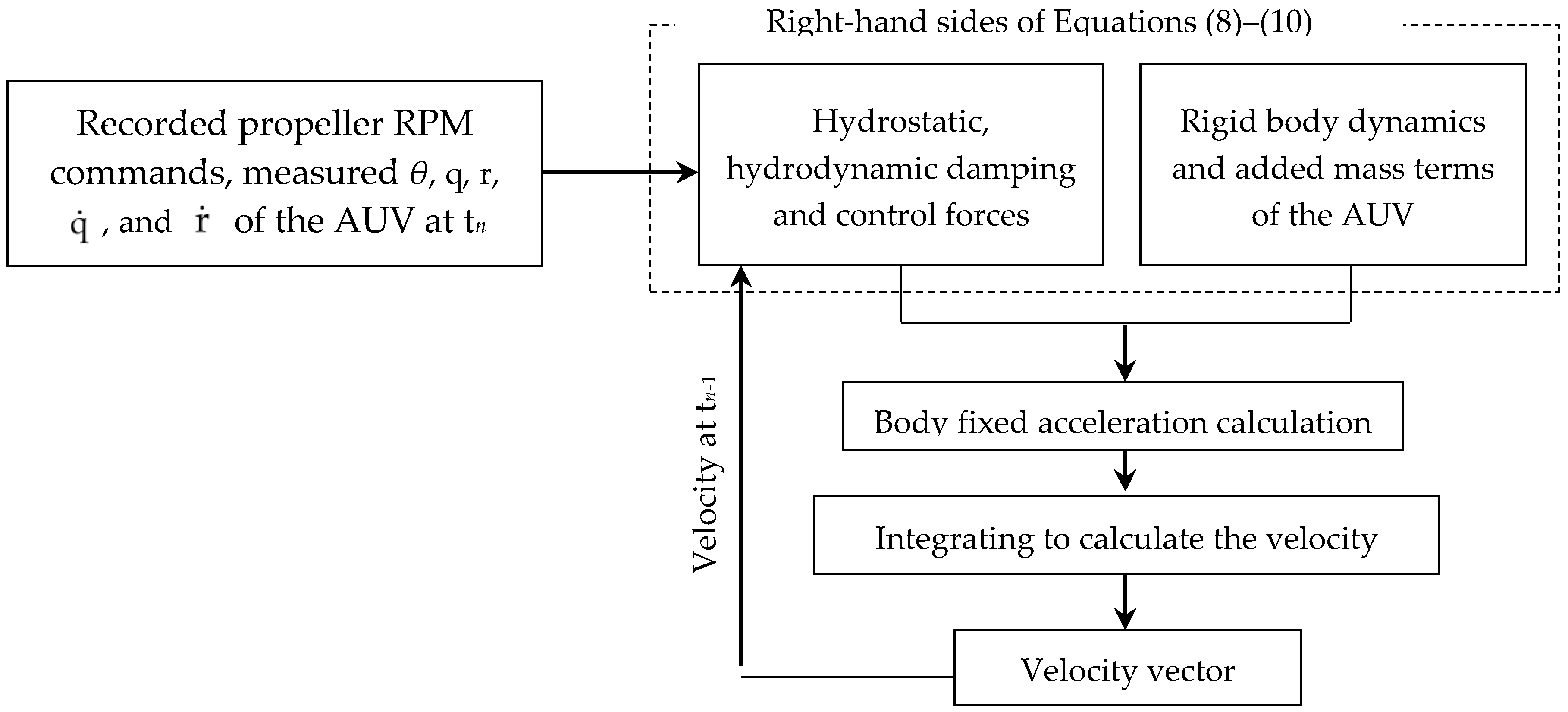
2.3.1. AUV Simulation Model
2.3.2. System Identification
3. Assessment
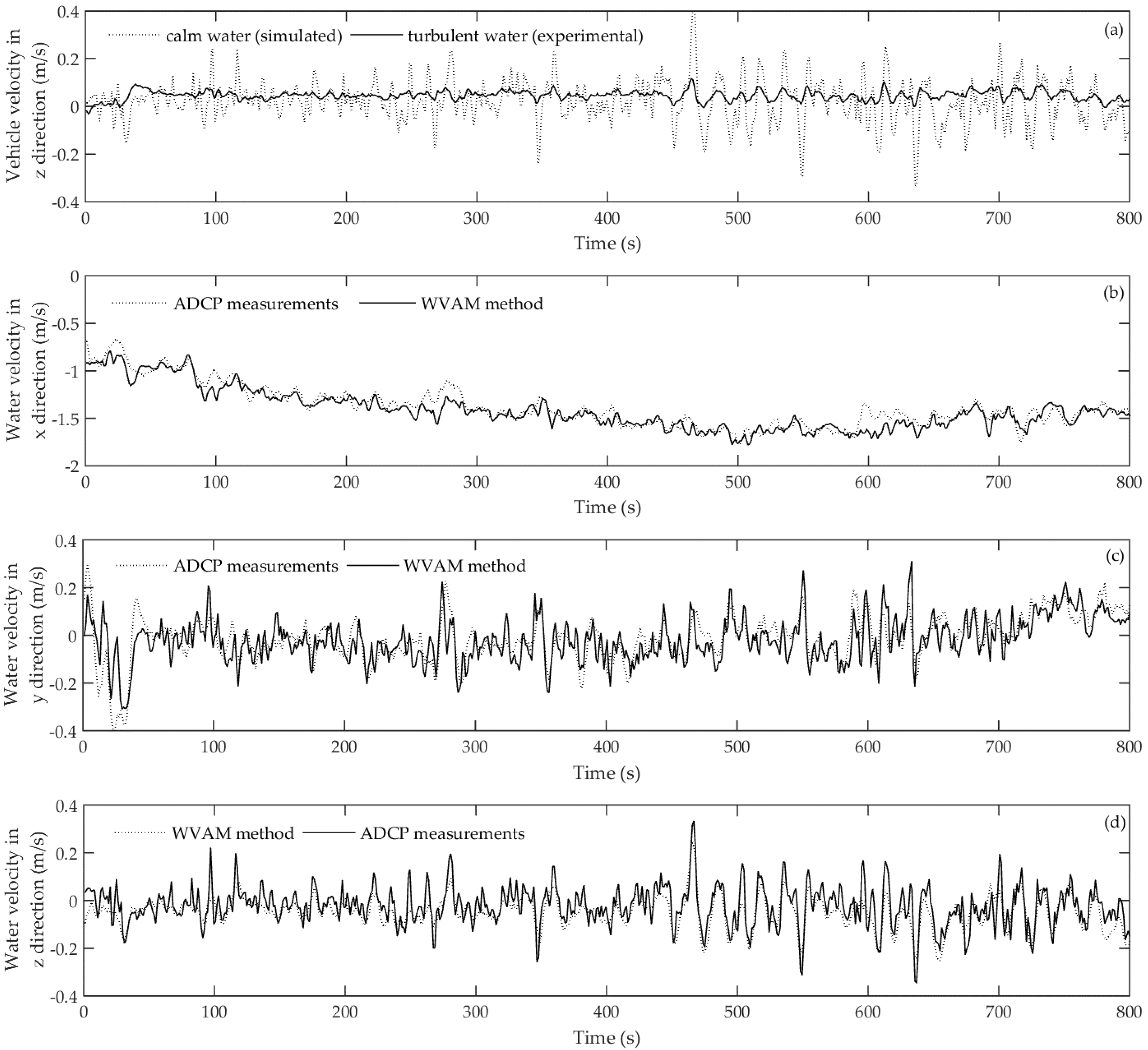
3.1. Validation of the WVAM Method
3.2. Verification of the WVAM Method
4. Discussion
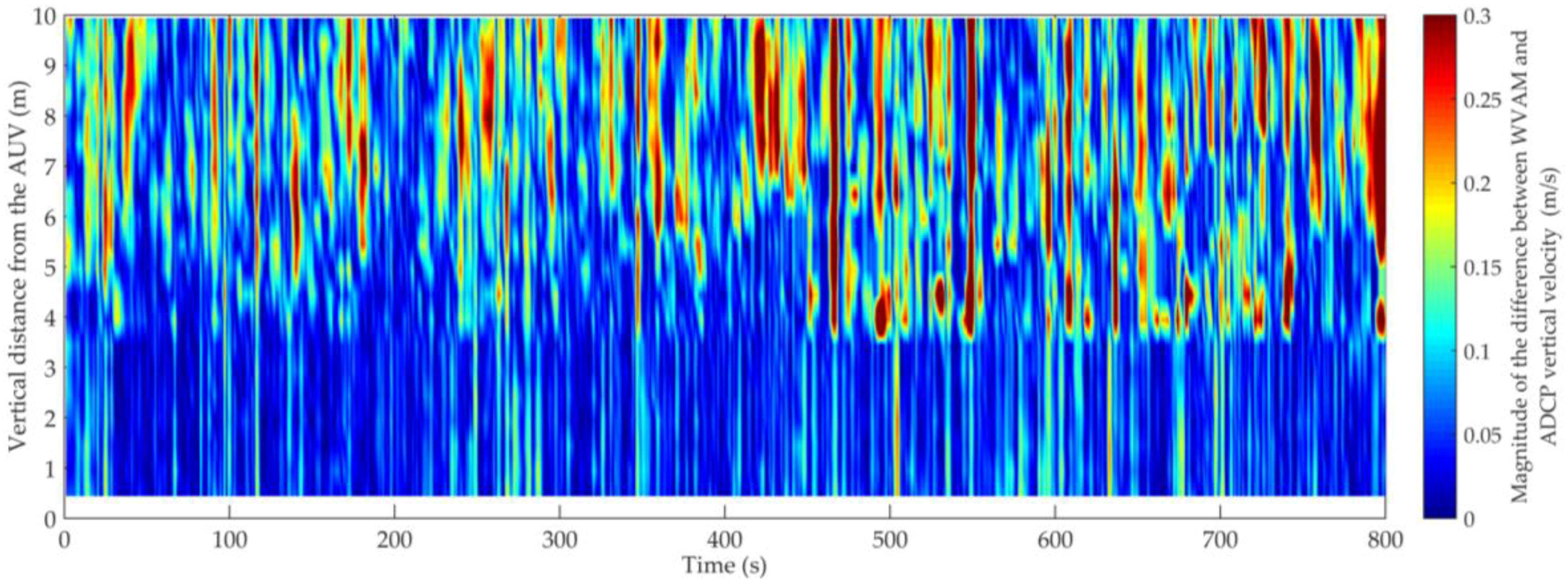
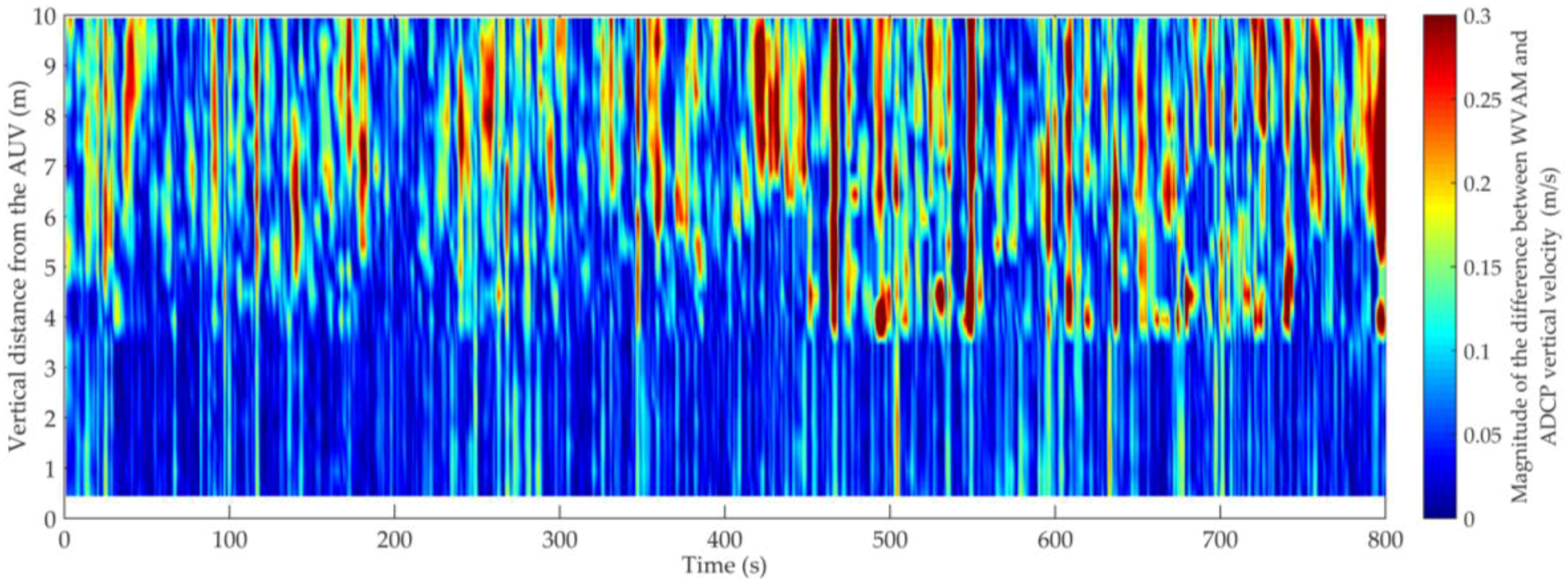
4.1. Accuracy with the Distance from the AUV
4.2. Length Scale of the WVAM Velocity Measurements
5. Recommendations
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Symbol | Description | Unit |
| B | Buoyancy force of the AUV | (N) |
| C(v) | Coriolis-centripetal matrix | - |
| CA(v) | Added mass component of C(v) | - |
| CRB(v) | Rigid body force component of C(v) | - |
| D(v) | Damping matrix | - |
| g(η) | Vector of gravitational/buoyancy forces and moments | - |
| H(t) | Matrix of time history of the states affecting the equations of motion | - |
| Ixx, Iyy, Izz | Moments of inertia of the body about z, y, z axes, respectively | (kg m2) |
| K, M, N | Hydrodynamic moment components relative to body axes | (Nm) |
| m | Mass of body | (kg) |
| M | System inertia matrix | - |
| MA | Added mass component of M | - |
| MRB | Rigid body force component of M | - |
| n | Number of time-steps | - |
| p, q, r | Angular velocity components relative to body axes x, y, z | (rad s−1) |
| , , | Angular acceleration components relative to body axes x, y, z | (rad s−2) |
| RPM | Propeller revolutions per minute | (-) |
| t | Time | (s) |
| u, v, w | Velocity components of origin of body along x, y and z directions | (m s−1) |
| , , | Acceleration components of origin of body along x, y and z directions | (m s−2) |
| W | Dry weight of the vehicle in air | (N) |
| x | The longitudinal axis, directed from the after to the forward end of the body | - |
| X, Y, Z | Hydrodynamic force components relative to body axes | (N) |
| xg, yg, zg | Coordinates of center of mass relative to body axes | (m) |
| y | The transverse axis, directed to starboard | - |
| y(t) | Next step state history for the equation of interest | - |
| z | The normal axis, directed from top to bottom | - |
| θ, ψ, ϕ | Angles of pitch, yaw and roll, respectively | (Rad) |
| Vector of position and Euler angles (i.e., [x, y, z, φ, θ, ψ]) | ||
| Vector of propulsion and control surface forces and moments | - | |
| Velocity vector (i.e., [u, v, w, p, q, r]T) | - | |
| linear velocity vector of the AUV (relative to the earth, in the body-fixed Coordinate system) obtained from the calm water simulation model when the control commands recorded during the field tests were simulated | (m s−1) | |
| Linear velocity vector of the AUV (relative to the earth, in the body-fixed coordinate system) measured in the turbulent environment | (m s−1) | |
| Linear velocity vector of the surrounding water column (along the x, y and z directions) relative to the earth in the body-fixed coordinate system | (m s−1) | |
| Parameter vector to be identified | - | |
| Water column velocity measured using the ADCP | (m s−1) | |
| Water column velocity estimated using the WVAM method | (m s−1) |
References
- Hughes, M.G.; Masselink, G.; Brander, R.W. Flow velocity and sediment transport in the swash zone of a steep beach. Mar. Geol. 1997, 138, 91–103. [Google Scholar] [CrossRef]
- Hayes, D.R.; Morison, J.H. Determining turbulent vertical velocity, and fluxes of heat and salt with an autonomous underwater vehicle. J. Atmos. Ocean. Technol. 2002, 19, 759–779. [Google Scholar] [CrossRef]
- Simpson, M.R. Discharge Measurements Using a Broad-Band Acoustic Doppler Current Profiler; US Department of the Interior, US Geological Survey: Sacramento, CA, USA, 2001.
- Sprintall, J.; Gordon, A.L.; Flament, P.; Villanoy, C.L. Observations of exchange between the South China Sea and the Sulu Sea. J. Geophys. Res. Oceans 2012, 117. [Google Scholar] [CrossRef]
- Fong, D.A.; Jones, N.L. Evaluation of auv-based adcp measurements. Limnol. Oceanogr. Methods 2006, 4, 58–67. [Google Scholar] [CrossRef]
- Kimura, S.; Jenkins, A.; Dutrieux, P.; Forryan, A.; Naveira Garabato, A.C.; Firing, Y. Ocean mixing beneath Pine Island Glacier ice shelf, West Antarctica. J. Geophys. Res. Oceans 2016, 121, 8496–8510. [Google Scholar] [CrossRef]
- Gandhi, B.; Verma, H.; Patnaik, S. Discharge measurement in small hydropower stations using acoustic doppler current profiler. In Proceedings of the 7th International Conference on Hydraulic Efficiency Measurements, IGHEM-2008, Milan, Italy, 3–6 September 2008; pp. 3–6. [Google Scholar]
- Frajka-Williams, E.; Eriksen, C.C.; Rhines, P.B.; Harcourt, R.R. Determining vertical water velocities from seaglider. J. Atmos. Ocean. Technol. 2011, 28, 1641–1656. [Google Scholar] [CrossRef]
- Rudnick, D.L.; Johnston, T.; Sherman, J.T. High-frequency internal waves near the luzon strait observed by underwater gliders. J. Geophys. Res. Oceans 2013, 118, 774–784. [Google Scholar] [CrossRef]
- Forrest, A.; Trembanis, A.; Todd, W. Ocean floor mapping as a precursor for space exploration. J. Ocean Technol. 2012, 7, 69–86. [Google Scholar]
- Kim, K.; Ura, T. Fuel-optimal guidance and tracking control of auv under current interaction. In Proceedings of the Thirteenth International Offshore and Polar Engineering Conference, Honolulu, HI, USA, 25–30 May 2003; International Society of Offshore and Polar Engineers: Mountain View, CA, USA, 2003. [Google Scholar]
- Lee, G.R. Principles of Operation a Practical Primer; RD Instruments: San Diego, CA, USA, 1996; Available online: http://RDInstruments.com (accessed on 20 August 2016).
- Green, S.; Cossu, R.; Penesis, I.; Nader, J.-R. Tidal energy: A promising future resource for tasmania. In Proceedings of the 3rd Asian Wave and Tidal Energy Conference (AWTEC 2016), Singapore, 24–28 October 2016; Research Publishing: Singapore, 2016; pp. 891–898. [Google Scholar]
- Ananthakrishnan, P.; Zhang, K.-Q. Auv motion in a wave field. In Proceedings of the OCEANS’98, Nice, France, 28 September–1 October 1998; pp. 1059–1063. [Google Scholar]
- Steel, V. Investigation Into the Effect of Wave Making on a Submarine Approaching the Free Surface; University of Tasmania: Launceston, Australia, 2010. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Chichester, UK, 2011. [Google Scholar]
- Prestero, T.T.J. Verification of a Six-Degree of Freedom Simulation Model for the Remus Autonomous Underwater Vehicle. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, September 2001. [Google Scholar]
- SNAME. Nomenclature for Treating the Motion of a Submerged Body Through a Fluid; Technical and Research Bulletin No. 1–5; SNAME: New York, NY, USA, 1952. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: Chichester, UK, 1994. [Google Scholar]
- Thorgilsson, H. Control of a Small Undermanned Underwater Vehicle Using Zero Optimizing Controllers. Master’s Thesis, Department of Electrical and Computer Engineering, University of Iceland, Reykjavík, Iceland, October 2006. [Google Scholar]
- Ljung, L. System Identification: Theory for the User; PTR Prentice Hall: Englewood Cliffs, NJ, USA, 1999. [Google Scholar]
- Wolkerstorfer, W.J. A Linear Maneuvering Model for Simulation of Slice Hulls. Master’s Thesis, DTIC Document. Naval Postgraduate School, Monterey, CA, USA, 1995. [Google Scholar]
- Randeni, S.A.T.; Forrest, A.L.; Cossu, R.; Leong, Z.Q.; King, P.D.; Ranmuthugala, D. Autonomous underwater vehicle motion response: A nonacoustic tool for blue water navigation. Mar. Technol. Soc. J. 2016, 50, 17–26. [Google Scholar] [CrossRef]
- Randeni, S.A.T.; Leong, Z.; Ranmuthugala, D.; Forrest, A.; Duffy, J. Numerical investigation of the hydrodynamic interaction between two underwater bodies in relative motion. Appl. Ocean Res. 2015, 51, 14–24. [Google Scholar]
- Phillips, A.B. Simulations of a Self Propelled Autonomous Underwater Vehicle. Ph.D. Thesis, University of Southampton, Southampton, UK, April 2010. [Google Scholar]
- Hildebrandt, M.; Hilljegerdes, J. Design of a versatile auv for high precision visual mapping and algorithm evaluation. In Proceedings of the 2010 IEEE/OES on Autonomous Underwater Vehicles (AUV), Monterey, CA, USA, 1–3 September 2010; pp. 1–6. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Degree-of-Freedom | Forces & Moments | Linear & Angular Velocity | Position & Euler Angles |
|---|---|---|---|
| Motions in the x-direction (surge) | X | u | x |
| Motions in the y-direction (sway) | Y | v | y |
| Motions in the z-direction (heave) | Z | w | z |
| Rotation about the x-axis (roll) | K | p | ϕ |
| Rotation about the y-axis (pitch) | M | q | θ |
| Rotation about the z-axis (yaw) | N | r | ψ |
| x Direction | y Direction | z Direction |
|---|---|---|
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| −2.47 × 104 | 1.20 × 10−1 | 1.53 × 101 | |||
| −4.64 × 101 | −4.91 × 10−2 | −3.72 × 10−2 | |||
| 6.02 × 101 | 4.32 × 10−4 | −4.69 × 10−2 | |||
| −4.42 × 101 | −3.97 × 10−5 | 3.50 × 10−4 | |||
| −7.11 | 3.78 × 10−4 | −5.26 × 10−4 | |||
| −1.35 × 101 | 2.84 × 101 | 5.34 × 10−5 | |||
| −8.94 × 102 | 4.93 × 10−3 | 0.00 × 101 | |||
| 5.21 × 103 | −2.17 × 10−3 |
| Uncertainty Components | Uncertainties Along | ||
|---|---|---|---|
| x Direction | y Direction | z Direction | |
| Due to hydrodynamic coefficients | ±0.010 m s−1 | ±0.005 m s−1 | ±0.002 m s−1 |
| Due to the turbulence present in the calm water environment | ±0.05 m s−1 | ±0.05 m s−1 | ±0.05 m s−1 |
| Due to sensor errors | ±0.100 m s−1 | ±0.100 m s−1 | ±0.100 m s−1 |
| Total uncertainty of the WVAM method | ±0.160 m s−1 | ±0.155 m s−1 | ±0.152 m s−1 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Randeni P., S.A.T.; Forrest, A.L.; Cossu, R.; Leong, Z.Q.; Ranmuthugala, D. Determining the Horizontal and Vertical Water Velocity Components of a Turbulent Water Column Using the Motion Response of an Autonomous Underwater Vehicle. J. Mar. Sci. Eng. 2017, 5, 25. https://doi.org/10.3390/jmse5030025
Randeni P. SAT, Forrest AL, Cossu R, Leong ZQ, Ranmuthugala D. Determining the Horizontal and Vertical Water Velocity Components of a Turbulent Water Column Using the Motion Response of an Autonomous Underwater Vehicle. Journal of Marine Science and Engineering. 2017; 5(3):25. https://doi.org/10.3390/jmse5030025
Chicago/Turabian StyleRandeni P., Supun A. T., Alexander L. Forrest, Remo Cossu, Zhi Q. Leong, and Dev Ranmuthugala. 2017. "Determining the Horizontal and Vertical Water Velocity Components of a Turbulent Water Column Using the Motion Response of an Autonomous Underwater Vehicle" Journal of Marine Science and Engineering 5, no. 3: 25. https://doi.org/10.3390/jmse5030025