
Hybrid Model Predictive Control of a Two-Body Wave Energy Converter with Mechanically Driven Power Take-Off

Abstract
:1. Introduction
2. Wave Energy Converter Model
2.1. Structure
2.2. Hydrodynamic Force
2.3. Power Take-Off Force
2.4. Control Force
2.5. State-Space Model
3. Hybrid MPC Problem Formulation
3.1. Hybrid Dynamical Model
3.2. Hybrid MPC Problem
4. Numerical Investigation and Result
4.1. Case Study
4.2. Control Force Constraint
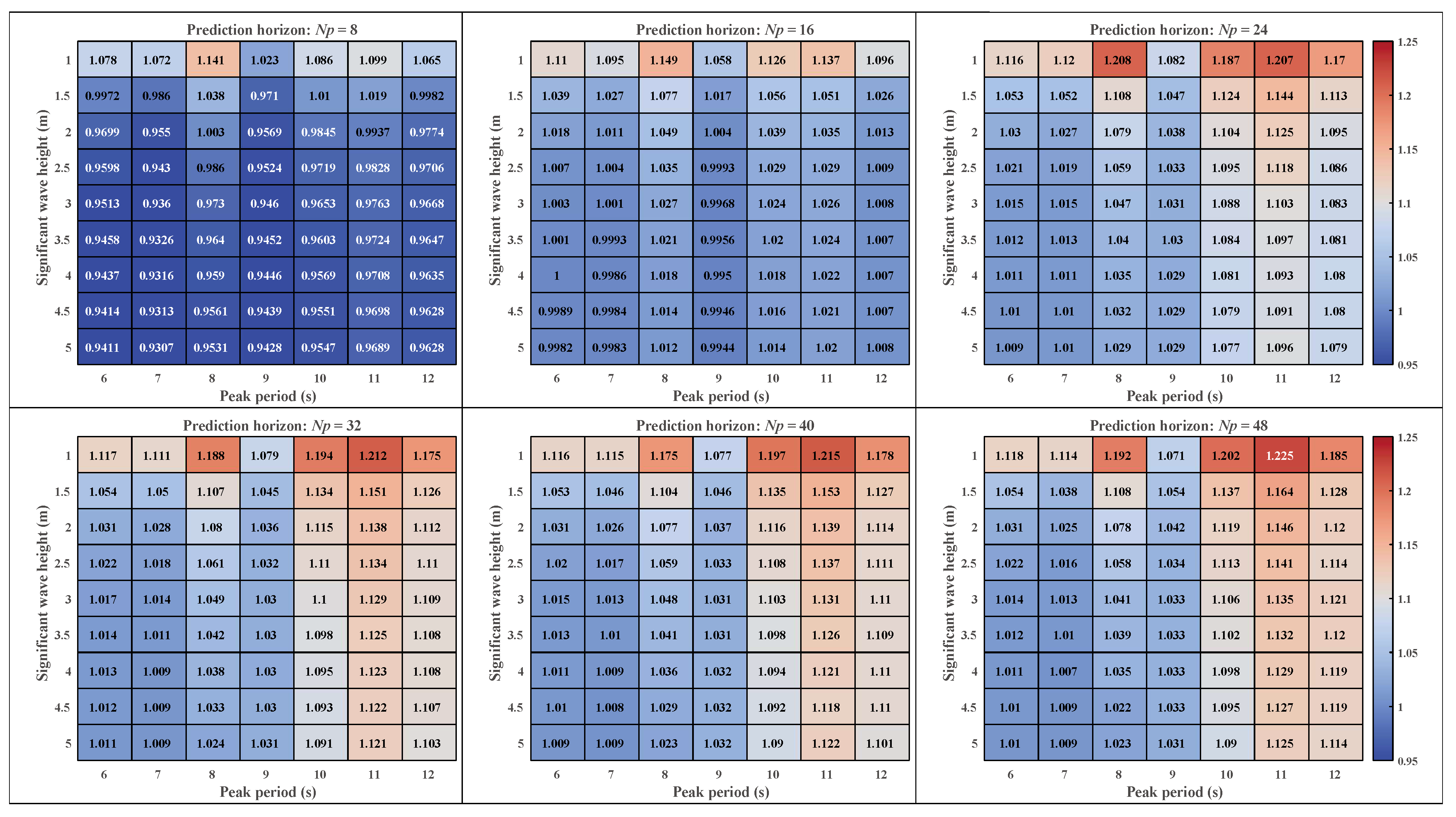
4.3. Prediction Horizon and Wave Condition
4.4. Prediction Error
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Ringwood, J.V.; Bacelli, G.; Fusco, F. Energy-Maximizing Control of Wave-Energy Converters: The Development of Control System Technology to Optimize Their Operation. IEEE Control Syst. Mag. 2014, 34, 30–55. [Google Scholar] [CrossRef]
- Lehmann, M.; Karimpour, F.; Goudey, C.A.; Jacobson, P.T.; Alam, M.-R. Ocean Wave Energy in the United States: Current Status and Future Perspectives. Renew. Sustain. Energy Rev. 2017, 74, 1300–1313. [Google Scholar] [CrossRef]
- Montoya Andrade, D.-E.A.; de la Villa Jaen, A.; Garcia Santana, A. Improvements in the Reactive Control and Latching Control Strategies Under Maximum Excursion Constraints Using Short-Time Forecast. IEEE Trans. Sustain. Energy 2016, 7, 427–435. [Google Scholar] [CrossRef]
- Falnes, J.; Kurniawan, A. Ocean Waves and Oscillating Systems: Linear Interactions Including Wave-Energy Extraction, 2nd ed.; Cambridge University Press: Cambridge, UK, 2020; ISBN 978-1-108-67481-2. [Google Scholar]
- Budal, K.; Falnes, J. Interacting Point Absorbers with Controlled Motion. In Power from Sea Waves; Academic Press: Cambridge, MA, USA, 1980; pp. 381–399. [Google Scholar]
- Teillant, B.; Gilloteaux, J.C.; Ringwood, J.V. Optimal Damping Profile for a Heaving Buoy Wave Energy Converter. IFAC Proc. Vol. 2010, 43, 360–365. [Google Scholar] [CrossRef]
- Feng, Z.; Kerrigan, E.C. Declutching Control of Wave Energy Converters Using Derivative-Free Optimization. IFAC Proc. Vol. 2014, 47, 7647–7652. [Google Scholar] [CrossRef]
- Feng, Z.; Kerrigan, E.C. Latching-Declutching Control of Wave Energy Converters Using Derivative-Free Optimization. IEEE Trans. Sustain. Energy 2015, 6, 773–780. [Google Scholar] [CrossRef]
- Wang, Z.; Luan, F.; Wang, N. An Improved Model Predictive Control Method for Wave Energy Converter with Sliding Mode Control. Ocean Eng. 2021, 240, 109881. [Google Scholar] [CrossRef]
- Li, L.; Gao, Y.; Ning, D.Z.; Yuan, Z.M. Development of a Constraint Non-Causal Wave Energy Control Algorithm Based on Artificial Intelligence. Renew. Sustain. Energy Rev. 2021, 138, 110519. [Google Scholar] [CrossRef]
- Lin, Z.; Huang, X.; Xiao, X. A Novel Model Predictive Control Formulation for Wave Energy Converters Based on the Reactive Rollout Method. IEEE Trans. Sustain. Energy 2022, 13, 491–500. [Google Scholar] [CrossRef]
- Sergiienko, N.Y.; Cocho, M.; Cazzolato, B.S.; Pichard, A. Effect of a Model Predictive Control on the Design of a Power Take-off System for Wave Energy Converters. Appl. Ocean Res. 2021, 115, 102836. [Google Scholar] [CrossRef]
- Faedo, N.; Olaya, S.; Ringwood, J.V. Optimal Control, MPC and MPC-like Algorithms for Wave Energy Systems: An Overview. IFAC J. Syst. Control 2017, 1, 37–56. [Google Scholar] [CrossRef]
- Li, X.; Chen, C.; Li, Q.; Xu, L.; Liang, C.; Ngo, K.; Parker, R.G.; Zuo, L. A Compact Mechanical Power Take-off for Wave Energy Converters: Design, Analysis, and Test Verification. Appl. Energy 2020, 278, 115459. [Google Scholar] [CrossRef]
- Jusoh, M.A.; Ibrahim, M.Z.; Daud, M.Z.; Albani, A.; Mohd Yusop, Z. Hydraulic Power Take-Off Concepts for Wave Energy Conversion System: A Review. Energies 2019, 12, 4510. [Google Scholar] [CrossRef]
- Falcão, A.F.O.; Henriques, J.C.C.; Gato, L.M.C. Self-Rectifying Air Turbines for Wave Energy Conversion: A Comparative Analysis. Renew. Sustain. Energy Rev. 2018, 91, 1231–1241. [Google Scholar] [CrossRef]
- Penalba, M.; Ringwood, J.V. A Review of Wave-to-Wire Models for Wave Energy Converters. Energies 2016, 9, 506. [Google Scholar] [CrossRef]
- Li, X.; Liang, C.; Chen, C.-A.; Xiong, Q.; Parker, R.G.; Zuo, L. Optimum Power Analysis of a Self-Reactive Wave Energy Point Absorber with Mechanically-Driven Power Take-Offs. Energy 2020, 195, 116927. [Google Scholar] [CrossRef]
- Martin, D.; Li, X.; Chen, C.-A.; Thiagarajan, K.; Ngo, K.; Parker, R.; Zuo, L. Numerical Analysis and Wave Tank Validation on the Optimal Design of a Two-Body Wave Energy Converter. Renew. Energy 2020, 145, 632–641. [Google Scholar] [CrossRef]
- Yang, L.; Huang, J.; Congpuong, N.; Chen, S.; Mi, J.; Bacelli, G.; Zuo, L. Control Co-Design and Characterization of a Power Takeoff for Wave Energy Conversion Based on Active Mechanical Motion Rectification. IFAC-Pap. 2021, 54, 198–203. [Google Scholar] [CrossRef]
- Li, Q.; Li, X.; Mi, J.; Jiang, B.; Chen, S.; Zuo, L. Tunable Wave Energy Converter Using Variable Inertia Flywheel. IEEE Trans. Sustain. Energy 2021, 12, 1265–1274. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, P.; Liu, Q. A Wave Energy Harvester Based on Coaxial Mechanical Motion Rectifier and Variable Inertia Flywheel. Appl. Energy 2021, 302, 117528. [Google Scholar] [CrossRef]
- Zhong, Q.; Yeung, R.W. Model-Predictive Control Strategy for an Array of Wave-Energy Converters. J. Mar. Sci. Appl. 2019, 18, 26–37. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, L.; Zuo, L. Design, Modeling, Lab, and Field Tests of a Mechanical-Motion-Rectifier-Based Energy Harvester Using a Ball-Screw Mechanism. IEEE/ASME Trans. Mechatron. 2017, 22, 1933–1943. [Google Scholar] [CrossRef]
- Lin, T.; Pan, Y.; Chen, S.; Zuo, L. Modeling and Field Testing of an Electromagnetic Energy Harvester for Rail Tracks with Anchorless Mounting. Appl. Energy 2018, 213, 219–226. [Google Scholar] [CrossRef]
- Li, X.; Chen, C.-A.; Chen, S.; Xiong, Q.; Huang, J.; Lambert, S.; Keller, J.; Parker, R.G.; Zuo, L. Dynamic Characterization and Performance Evaluation of a 10-kW Power Take-off with Mechanical Motion Rectifier for Wave Energy Conversion. Ocean Eng. 2022, 250, 110983. [Google Scholar] [CrossRef]
- Qin, Y.; Zhao, F.; Wang, Z.; Gu, L.; Dong, M. Comprehensive Analysis for Influence of Controllable Damper Time Delay on Semi-Active Suspension Control Strategies. J. Vib. Acoust. 2017, 139, 031006. [Google Scholar] [CrossRef]
- Borrelli, F.; Bemporad, A.; Morari, M. Predictive Control for Linear and Hybrid Systems; Cambridge University Press: Cambridge, UK, 2017; ISBN 1-108-15829-3. [Google Scholar]
- Lao, Y.; Scruggs, J.T.; Karthikeyan, A.; Previsic, M. Discrete-Time Causal Control of a Wave Energy Converter With Finite Stroke in Stochastic Waves. IEEE Trans. Control Syst. Technol. 2022, 30, 1198–1214. [Google Scholar] [CrossRef]
- Torrisi, F.D.; Bemporad, A. HYSDEL—A Tool for Generating Computational Hybrid Models for Analysis and Synthesis Problems. IEEE Trans. Contr. Syst. Technol. 2004, 12, 235–249. [Google Scholar] [CrossRef]
- Yu, Y.H.; Lawson, M.; Li, Y.; Previsic, M.; Epler, J.; Lou, J. Experimental Wave Tank Test for Reference Model 3 Floating-Point Absorber Wave Energy Converter Project; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2015.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Body | Diameter (m) | Draft (m) | Mass (t) | CoG (m) | |
|---|---|---|---|---|---|
| Float | 20 | 3 | 727.01 | −0.72 | |
| Reaction section | Spar | 6 | 30 | 878.30 | −21.29 |
| Plate | 30 |
| Symbol | Quantity | Parameter Explanation |
|---|---|---|
| ng | 10 | gearbox ratio |
| Ig | 0.54 kg∙m2 | generator moment of inertia |
| L | 0.1 m | ballscrew lead |
| kt | 2.5 Nm/A | generator torque constant |
| ke | 120 Vs/rad | generator speed constant |
| Ri | 2.1 Ω | internal resistance |
| Ro | 100 Ω | external resistance |
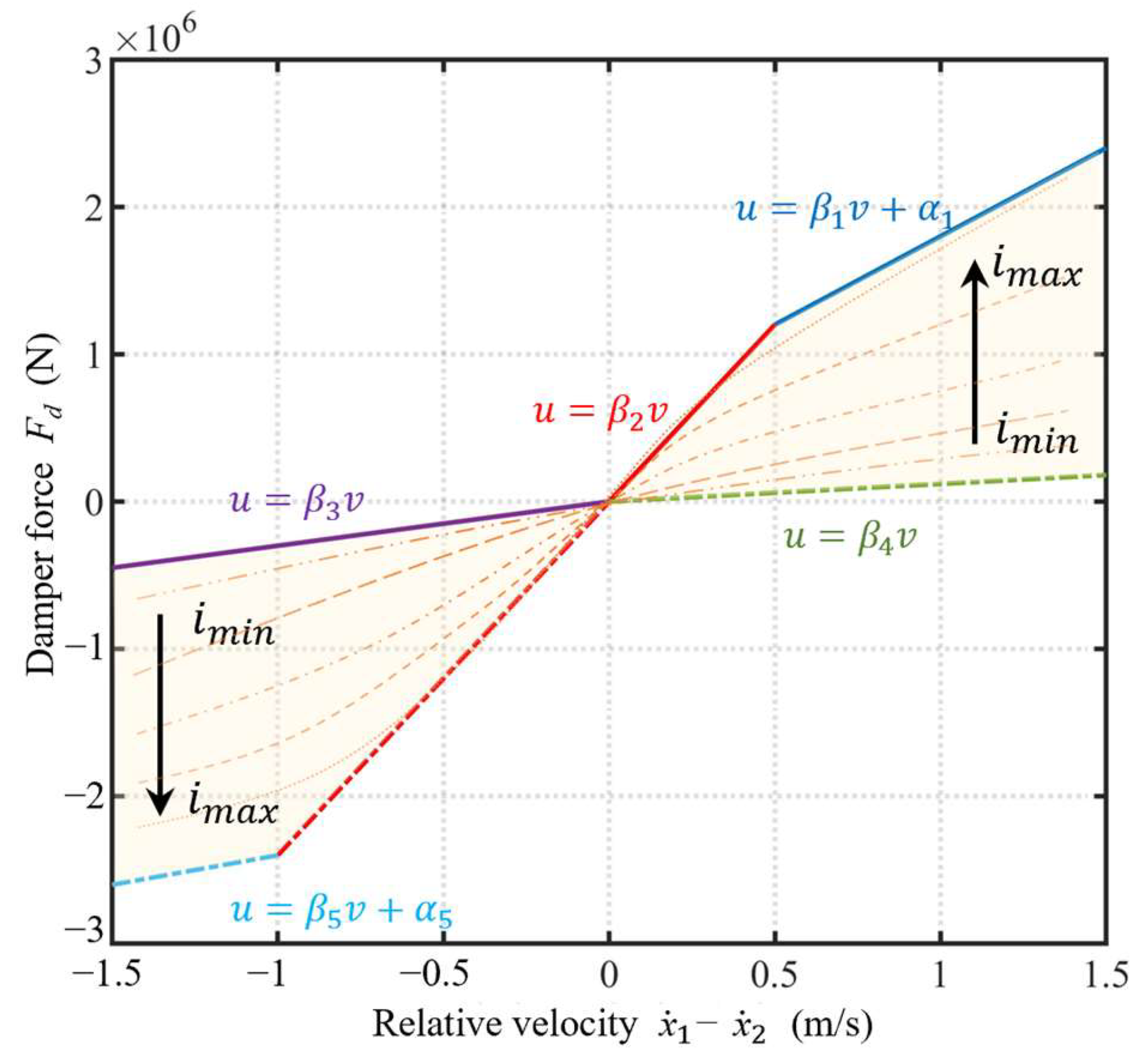
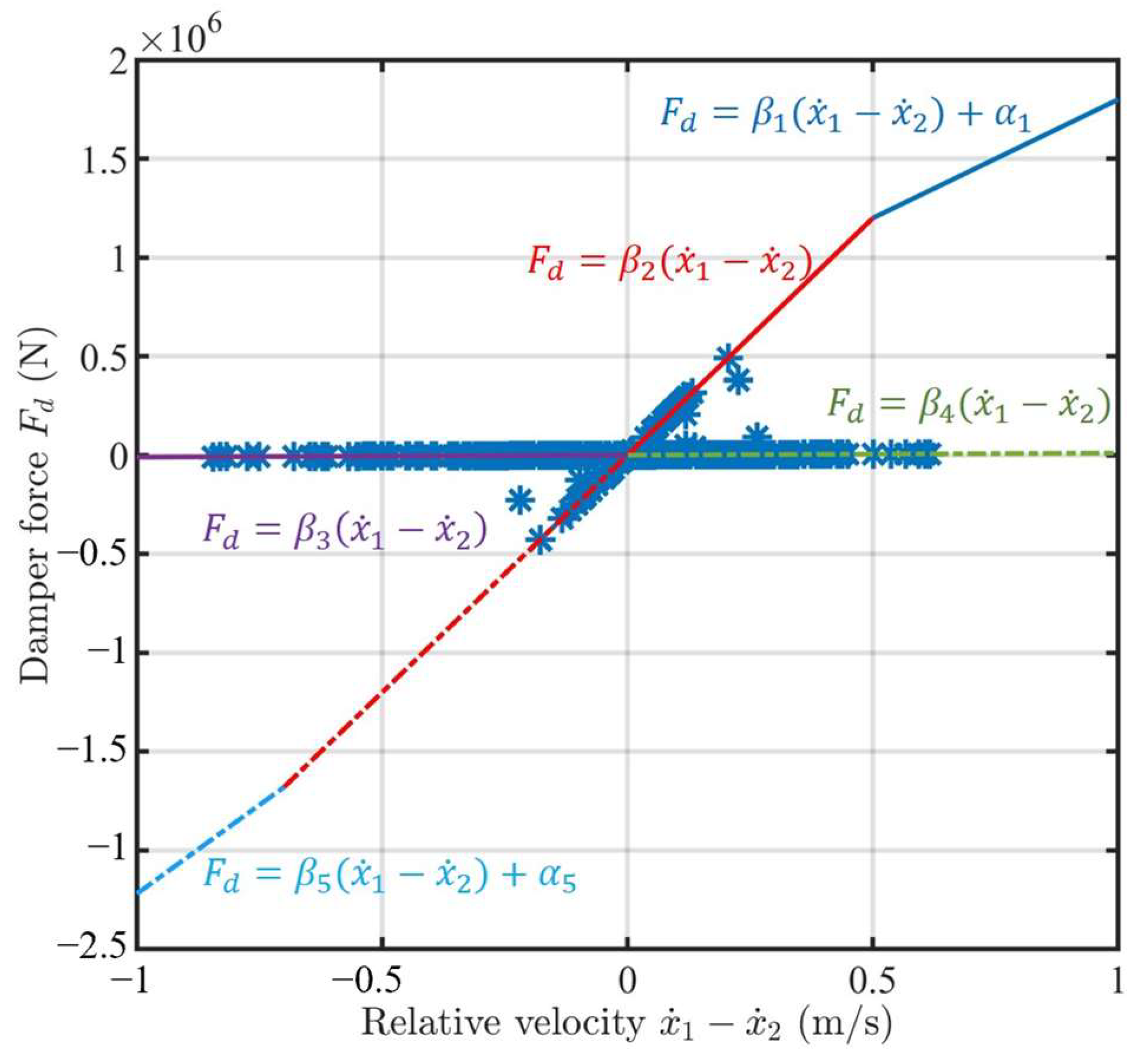
| Parameter | β1 | β2 | β3 | β4 | β5 | α1 | α5 |
|---|---|---|---|---|---|---|---|
| Value | 1.2 × 106 | 2.4 × 106 | 1.0 × 104 | 1.0 × 104 | 1.8 × 106 | 6.0 × 105 | −4.2 × 105 |
| Symbol | Quantity | Parameter Explanation |
|---|---|---|
| xmax | 8 m | maximum relative displacement |
| xmin | −8 m | minimum relative displacement |
| vmin | 5 m/s | maximum relative velocity |
| vmax | −5 m/s | minimum relative velocity |
| β3, β4 (104) | Average Power (kW) | Power Improvement Percentage (%) |
|---|---|---|
| 0 | 82.214 | 7.4454 |
| 0.01 | 82.206 | 7.4349 |
| 0.1 | 82.139 | 7.3474 |
| 1 | 81.469 | 6.4718 |
| 10 | 75.406 | −1.4520 |
| 50 | 55.483 | −27.4893 |
| 100 | 41.453 | −45.8251 |
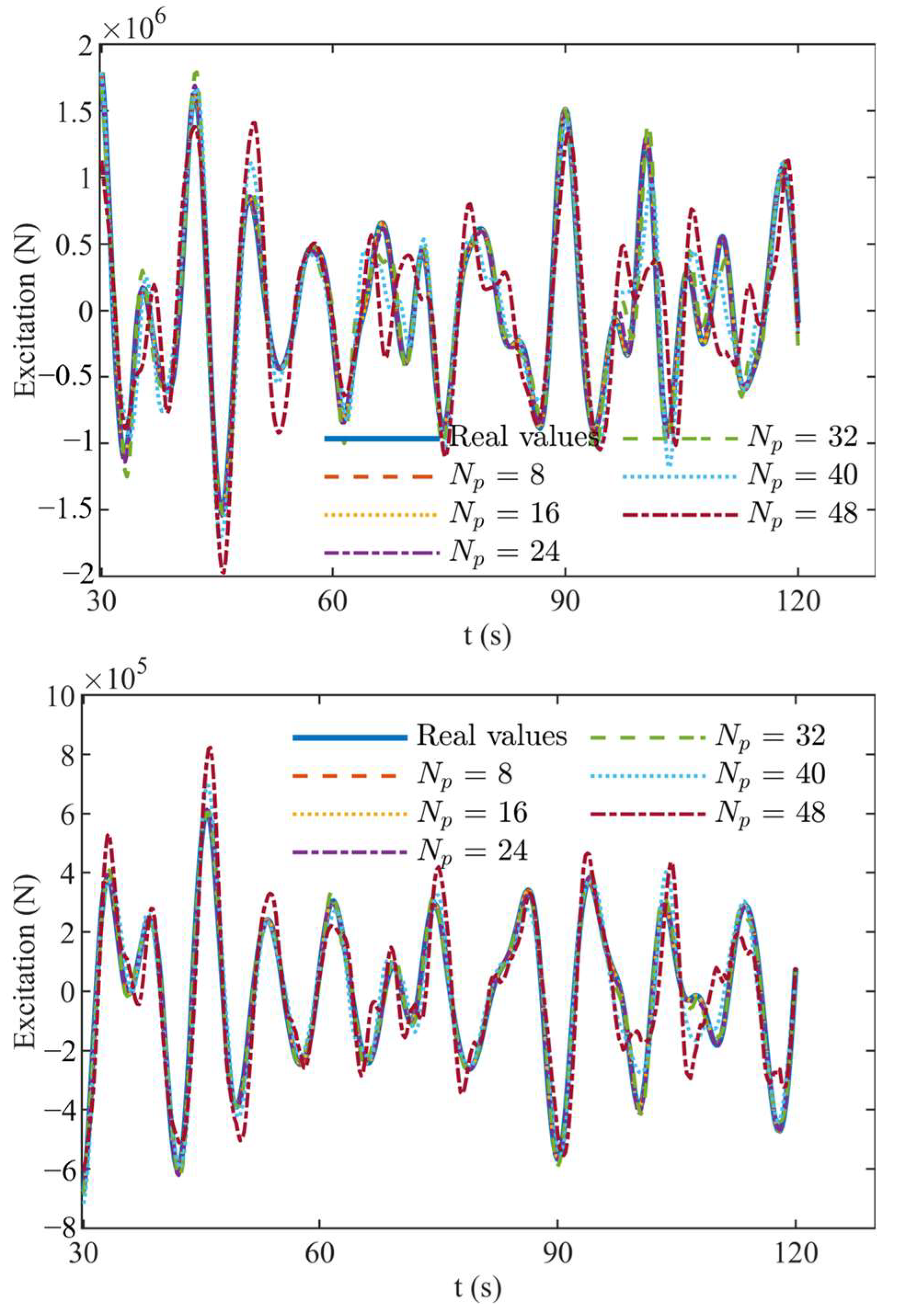
| Np | GoF1 (%) | GoF2 (%) | Power1 (kW) | Power2 (kW) | Power Improvement Percentage (%) |
|---|---|---|---|---|---|
| 8 | 99.99 | 99.99 | 75.73 | 77.02 | 1.70% |
| 16 | 99.56 | 99.79 | 79.48 | 79.56 | 1.00% |
| 24 | 94.31 | 96.67 | 81.31 | 81.06 | −0.31% |
| 32 | 81.62 | 91.93 | 81.47 | 81.44 | −0.04% |
| 40 | 67.28 | 78.06 | 81.34 | 80.57 | −0.95% |
| 48 | 39.58 | 60.09 | 81.28 | 77.50 | −4.65% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Qin, J.; Wang, D.; Huang, S.; Liu, Y.; Xue, G. Hybrid Model Predictive Control of a Two-Body Wave Energy Converter with Mechanically Driven Power Take-Off. J. Mar. Sci. Eng. 2023, 11, 1618. https://doi.org/10.3390/jmse11081618
Zhang Z, Qin J, Wang D, Huang S, Liu Y, Xue G. Hybrid Model Predictive Control of a Two-Body Wave Energy Converter with Mechanically Driven Power Take-Off. Journal of Marine Science and Engineering. 2023; 11(8):1618. https://doi.org/10.3390/jmse11081618
Chicago/Turabian StyleZhang, Zhenquan, Jian Qin, Dengshuai Wang, Shuting Huang, Yanjun Liu, and Gang Xue. 2023. "Hybrid Model Predictive Control of a Two-Body Wave Energy Converter with Mechanically Driven Power Take-Off" Journal of Marine Science and Engineering 11, no. 8: 1618. https://doi.org/10.3390/jmse11081618