
Ship Autonomous Collision-Avoidance Strategies—A Comprehensive Review

 ,
,
Abstract
:
1. Introduction
- (1)
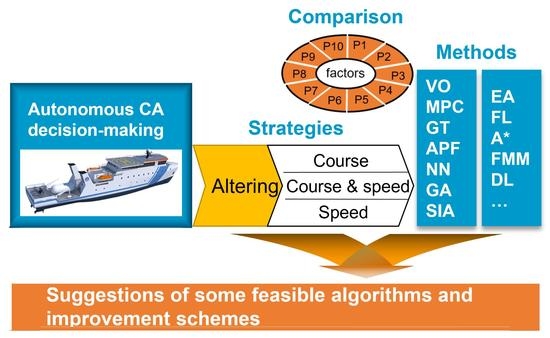
- Based on the perspective of CA strategy selection, this paper divides current autonomous CA decision-making algorithms into three categories to cope with different navigation scenarios and needs.
- (2)
- This paper compares and discusses the specific measures adopted by current CA strategies in computer implementation and their advantages and disadvantages so as to provide a reference for designers of autonomous CA decision-making.
- (3)
- The influence of the coupling mechanisms of alteration of both course and speed on CA effect is quantitatively analyzed for the first time in this field from the perspective of autonomous CA decision-making effectiveness.
2. Bibliometric Analysis and Thesis Research Factor
2.1. Development Trends and Source Analysis
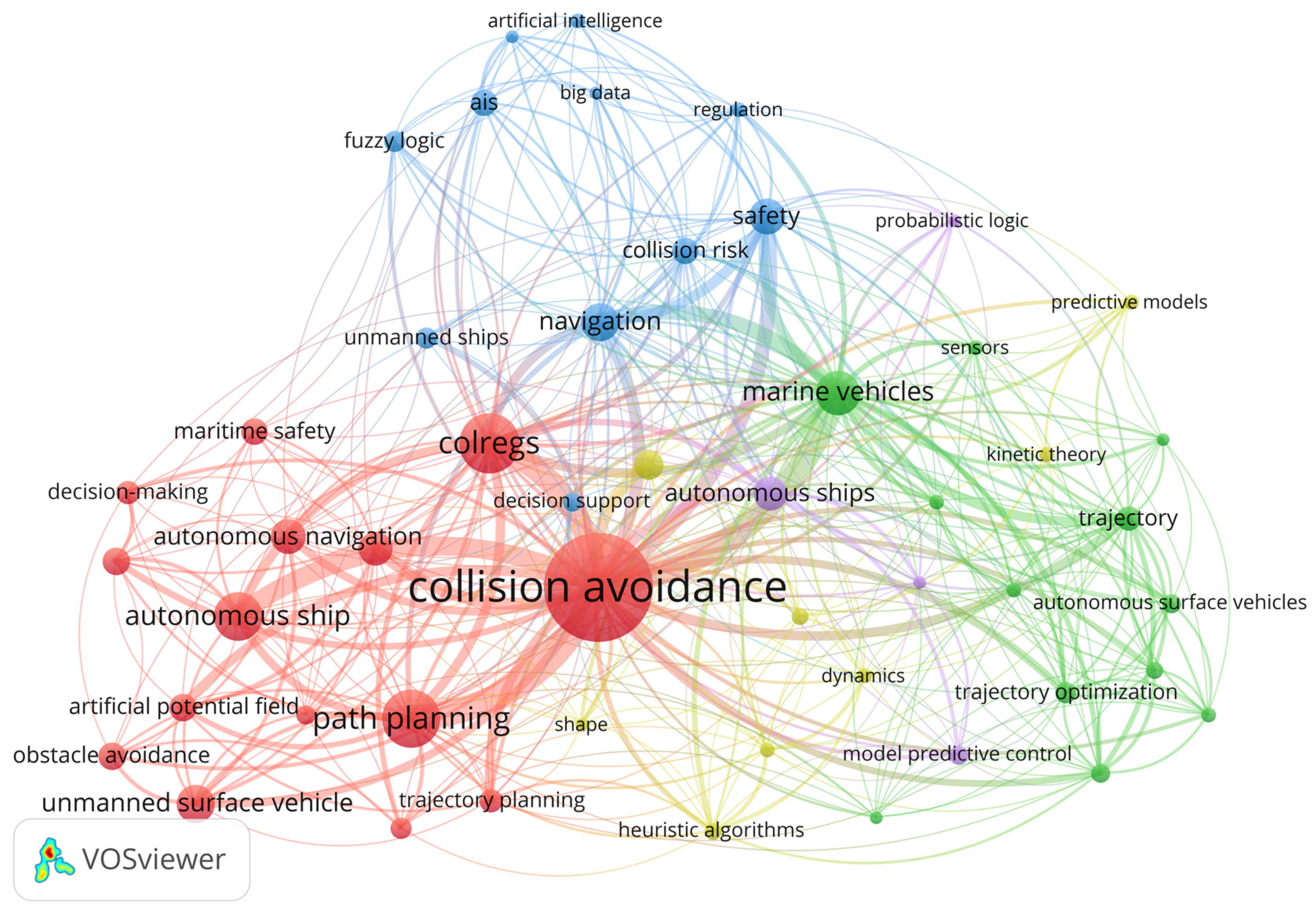
2.2. Keywords
2.3. Research Factors
3. Automatic CA Strategy Based on Alteration of Course Alone
3.1. Algorithms Based on Mathematical Models
- (1)
- Geometric analysis
- (2)
- VO
- (3)
- MPC
- (4)
- Game Theory (GT)
- (5)
- Artificial Potential Field (APF)
3.2. Artificial Intelligence and Soft Computing-Based Algorithms
- (1)
- Knowledge-based systems
- (2)
- Neural Network (NN)
- (3)
- Evolutionary algorithms
- (4)
- Swarm intelligence algorithm (SIA)
- (5)
- Fuzzy logic (FL)
- (6)
- Reinforcement learning (RL)
3.3. Summary and Comparison of Methods
- (1)
- Most verification algorithms assume that target ships keep their speed and comply with the COLREGs and do not consider the violations of the COLREGs by target ships.
- (2)
- A part of these algorithms does not consider the maneuverability of the ship, which makes them unsuitable for actual ship navigation.
- (3)
- Environmental disturbances, such as wind, waves, and currents, are not considered.
4. Automatic CA Strategy Based on Alteration of Speed Alone
4.1. Optimization of Strategy Selection for Changing Speed
4.2. Research on CA Law of Altering Speed
5. Automatic CA Strategy Based on Altering Course and Speed
5.1. Establishing Objective Function through Course and Speed
5.2. Safe-Speed and Limited-Speed Methods
5.3. Course and Speed Alteration Strategy Using Hybrid Algorithm
6. Discussion
6.1. Comparison of Decision-Making Methods
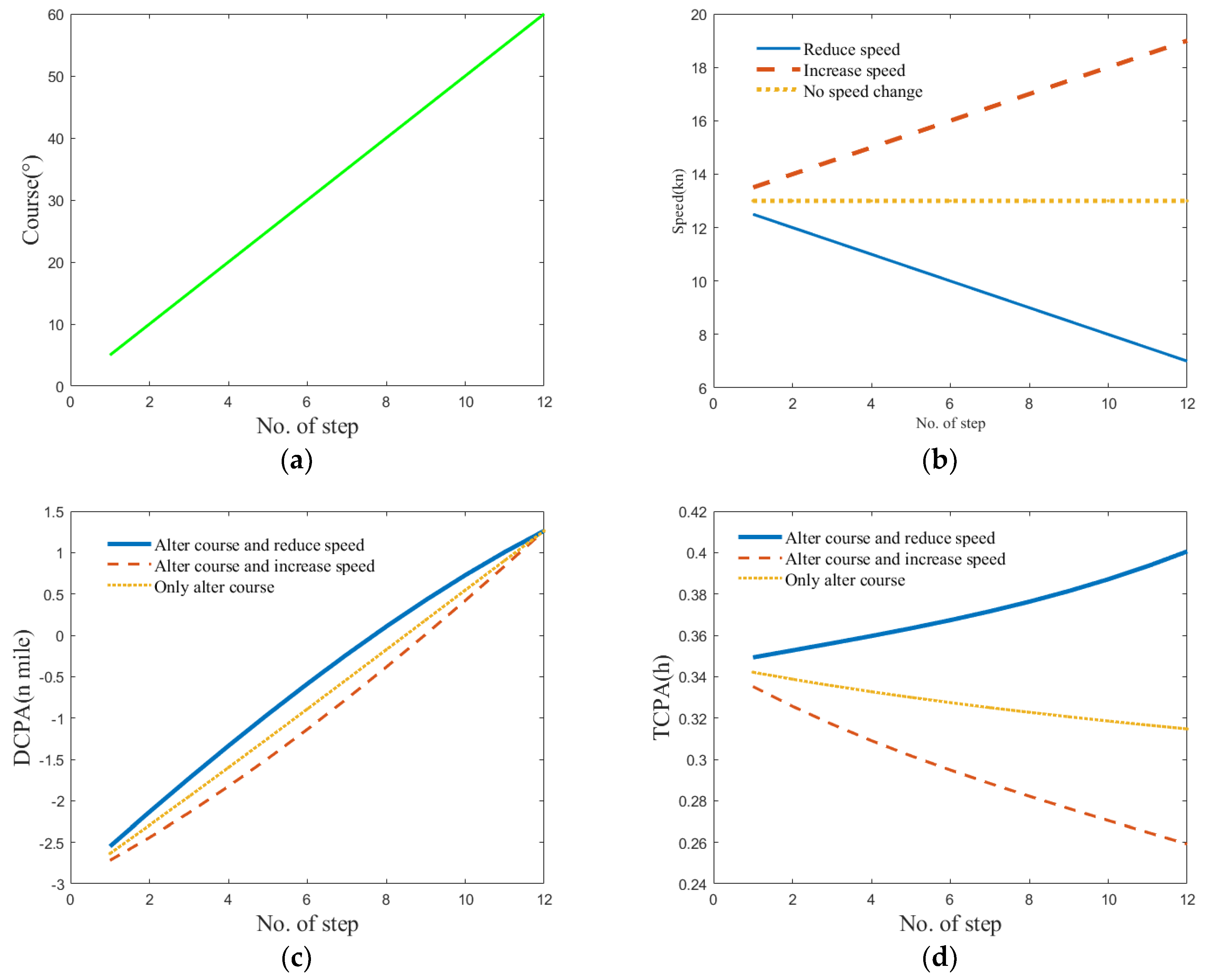
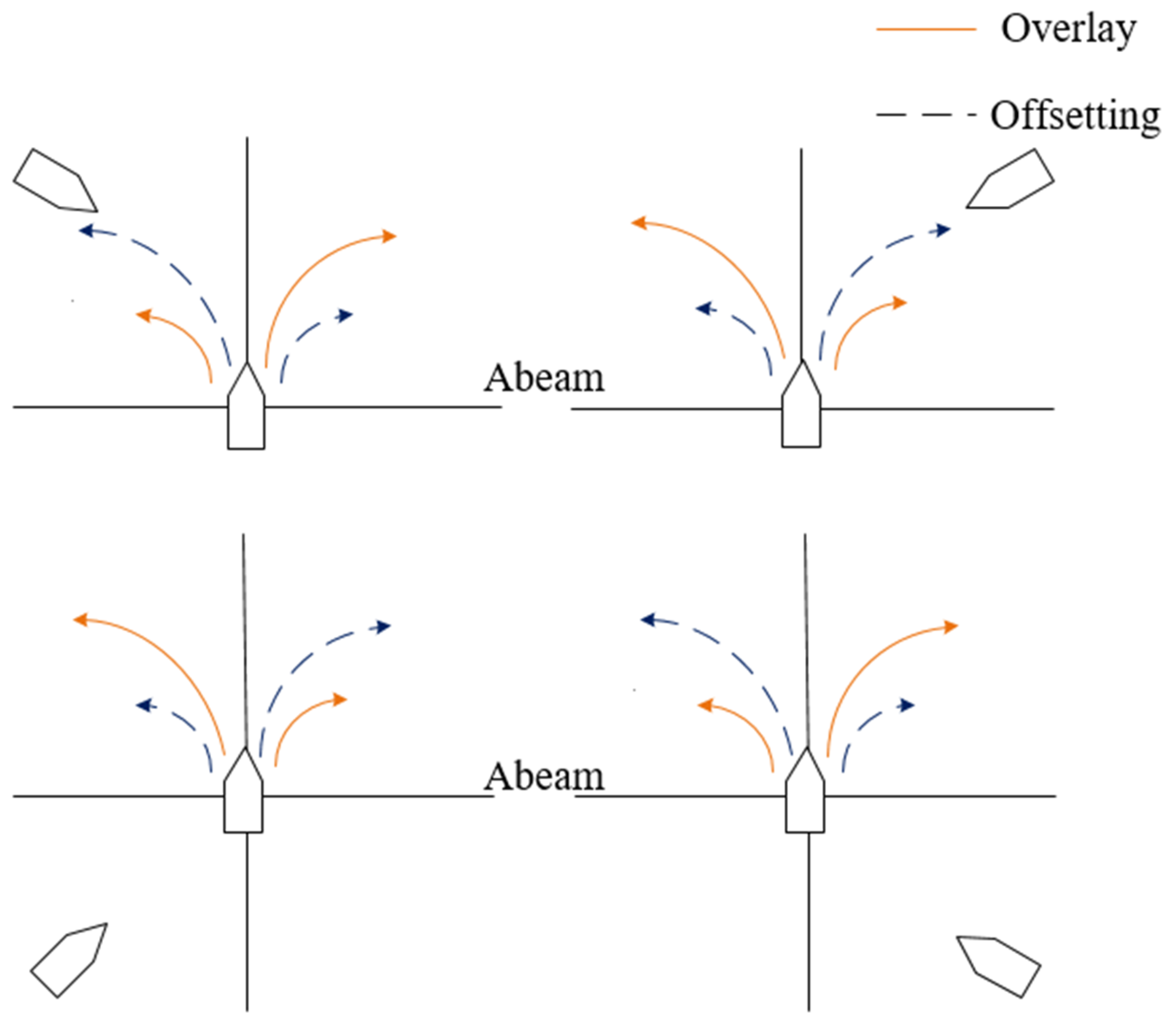
6.2. Influence of Alteration of Course and Speed Coupling Mechanisms on Collision Avoidance
6.3. Decision-Making Constraints
- (1)
- Most research studies remain in the theoretical and simulation stages. Their methods of autonomous CA assume that the navigation environment is known, but the change in the navigation environment is a particularly important factor; whether these methods can be applied to the actual navigation environment remains to be considered and verified.
- (2)
- Most of the experiments assume that target ships maintain their speed or comply with the COLREGs. In actual sailing, target ships may violate the COLREGs. Only a small percentage considers the occurrence of this situation; however, the CA strategy of their experimental results does not conform to the COLREGs.
- (3)
- The navigation of intelligent ships is affected by very complex external environments, such as external wind, waves, currents, shallow-water effects, bank effects, and ship-to-ship effects, and it is difficult for current algorithms to fully simulate these complex environments and establish an accurate ship dynamic model and their environment model.
- (1)
- It is possible to conduct scene-dynamic modeling and risk analysis research on complex environments; simulate the effects of wind, waves, and currents; and evaluate an algorithm in combination with multi-ship encounters.
- (2)
- In an algorithm test, it is necessary to simulate the situation of target ships that do not comply with the rules, analyze the situation, and discuss the results. It is better to verify the autonomous CA algorithm and its strategy with a large number of automatically generated test samples to find out the performance boundary of the algorithm.
- (3)
- The accuracy of a model significantly affects the results of the algorithm used. It is necessary to further study the ship-motion model under the influence of a complex external environment and combine deep learning and digital twin technologies to realize the autonomous control of a ship.
7. Conclusions
- (1)
- Deep learning can only obtain results based on a trained database, and it relies heavily on the accuracy of the database, which depends on the training model. Therefore, it can be combined with a CA model based on the APF, the A* algorithm, and other algorithms.
- (2)
- Although MPC can control the course and speed simultaneously, it has significantly high requirements for the ship mathematical model, and the solution of the nonlinear objective function is also a significant problem. After adding constraints, the objective function can attempt to use a multi-objective optimization algorithm to derive the best decision.
- (3)
- APF can effectively solve the path planning problem in a static environment. For real-time CA problems considering dynamic obstacles, only the relative distance between a ship and obstacles is typically considered, and it is easy to fall into local optimal problems. It can be combined with collision cones to identify risks, as well as with deep learning to train models to avoid local optimal problems.
- (1)
- Steering avoidance can be used in any water area. For restricted waters, it is possible to take a large turn to avoid or to act early. In an emergency, combining turn and deceleration to avoid collision should be considered. The current study solves the problem through the simultaneous objective-function method and a hybrid algorithm of heading and speed changes. There are also other problems, such as CA actions that do not satisfy the requirements of the COLREGs, and the ship mathematical model is not sufficiently accurate.
- (2)
- Regarding the autonomous CA strategy coupled with steering and variable speed avoidance, some scholars have made basic scenario assumptions and analyzed the effect of coupling avoidance. In fact, the scenarios encountered by ships are extremely complex, and the factors for judging danger should not only be the DCPA and TCPA, but the speed ratio of the ship and other factors should also be added. Research can be conducted on this aspect and provide a theoretical basis for the strategy selection of a ship’s autonomous CA.
- (3)
- The selection of a CA strategy is closely related to the navigation environment, navigation rules, and ship maneuverability. It is necessary to combine these conditions to determine a selection mechanism for autonomous CA strategy with adaptive functions, which will significantly improve the autonomy level of smart ships.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, T.; Schröder-Hinrichs, J. Research Developments and Debates Regarding Maritime Autonomous Surface Ship: Status, Challenges and Perspectives. In New Maritime Business; WMU Studies in Maritime Affairs: Cham, Switzerland, 2021; pp. 175–197. [Google Scholar]
- Öztürk, Ü.; Akdağ, M.; Ayabakan, T. A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective. Ocean Eng. 2022, 251, 111010. [Google Scholar] [CrossRef]
- Hinostroza, M.A.; Xu, H.; Guedes Soares, C. Cooperative operation of autonomous surface vehicles for maintaining formation in complex marine environment. Ocean Eng. 2019, 183, 132–154. [Google Scholar] [CrossRef]
- Qiao, Y.; Yin, J.; Wang, W.; Duarte, F.; Yang, J.; Ratti, C. Survey of Deep Learning for Autonomous Surface Vehicles in Marine Environments. IEEE Trans. Intell. Transp. 2023, 24, 3678–3701. [Google Scholar] [CrossRef]
- Zhu, Z.; Yin, Y.; Lyu, H. Automatic collision avoidance algorithm based on route-plan-guided artificial potential field method. Ocean Eng. 2023, 271, 113737. [Google Scholar] [CrossRef]
- Lyu, H.G.; Yin, Y. COLREGS-Constrained Real-time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Ohn, S.; Namgung, H. Requirements for Optimal Local Route Planning of Autonomous Ships. J. Mar. Sci. Eng. 2023, 11, 17. [Google Scholar] [CrossRef]
- Sun, T.; Liu, C.; Xu, S.; Hu, Q.; Li, C. COLREGS-Complied Automatic Collision Avoidance for the Encounter Situations of Multiple Vessels. J. Mar. Sci. Eng. 2022, 10, 1688. [Google Scholar] [CrossRef]
- Pietrzykowski, Z.; Wołejsza, P.; Nozdrzykowski, A.; Borkowski, P.; Banaś, P.; Magaj, J.; Chomski, J.; Mąka, M.; Mielniczuk, S.; Pańka, A.; et al. The autonomous navigation system of a sea-going vessel. Ocean Eng. 2022, 261, 112104. [Google Scholar] [CrossRef]
- Lisowski, J. Sensitivity of Safe Trajectory in a Game Environment on Inaccuracy of Radar Data in Autonomous Navigation. Sensors 2019, 19, 1816. [Google Scholar] [CrossRef] [Green Version]
- Campbell, S.; Naeem, W.; Irwin, G.W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef] [Green Version]
- Pietrzykowski, Z.; Wołejsza, P.; Borkowski, P. Decision Support in Collision Situations at Sea. J. Navig. 2017, 70, 447–464. [Google Scholar] [CrossRef]
- Zhu, Z.; Lyu, H.; Zhang, J.; Yin, Y. An Efficient Ship Automatic Collision Avoidance Method Based on Modified Artificial Potential Field. J. Mar. Sci. Eng. 2022, 10, 3. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Fast Path Planning for Autonomous Ships in Restricted Waters. Appl. Sci. 2018, 8, 2592. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Lyu, H.; Zhang, J.; Yin, Y.; Fan, X. A practical environment potential field modelling method for complex geometric objects. J. Navig. 2022, 1–24. [Google Scholar] [CrossRef]
- Deng, F.; Jin, L.; Hou, X.; Wang, L.; Li, B.; Yang, H. COLREGs: Compliant Dynamic Obstacle Avoidance of USVs Based on theDynamic Navigation Ship Domain. J. Mar. Sci. Eng. 2021, 9, 837. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Papadimitriou, E.; Mou, J.; van Gelder, P. Global path planning for autonomous ship: A hybrid approach of Fast Marching Square and velocity obstacles methods. Ocean Eng. 2020, 214, 107793. [Google Scholar] [CrossRef]
- Gan, L.; Yan, Z.; Zhang, L.; Liu, K.; Zheng, Y.; Zhou, C.; Shu, Y. Ship path planning based on safety potential field in inland rivers. Ocean Eng. 2022, 260, 111928. [Google Scholar] [CrossRef]
- Perera, L.P.; Guedes Soares, C. Collision risk detection and quantification in ship navigation with integrated bridge systems. Ocean Eng. 2015, 109, 344–354. [Google Scholar] [CrossRef]
- Liu, K.; Yuan, Z.; Xin, X.; Zhang, J.; Wang, W. Conflict detection method based on dynamic ship domain model for visualization of collision risk Hot-Spots. Ocean Eng. 2021, 242, 110143. [Google Scholar] [CrossRef]
- Szlapczynski, R. A Unified Measure of Collision Risk Derived from the Concept of a Ship Domain. J. Navig. 2006, 59, 477–490. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Papadimitriou, E.; Mou, J.; van Gelder, P.H.A.J. An improved time discretized non-linear velocity obstacle method for multi-ship encounter detection. Ocean Eng. 2020, 196, 106718. [Google Scholar] [CrossRef]
- Mou, J.; Li, M.; Hu, W.; Zhang, X.; Gong, S.; Chen, P.; He, Y. Mechanism of dynamic automatic collision avoidance and the optimal route in multi-ship encounter situations. J. Mar. Sci. Technol. 2021, 26, 141–158. [Google Scholar] [CrossRef]
- Du, L.; Goerlandt, F.; Valdez Banda, O.A.; Huang, Y.; Wen, Y.; Kujala, P. Improving stand-on ship’s situational awareness by estimating the intention of the give-way ship. Ocean Eng. 2020, 201, 107110. [Google Scholar] [CrossRef]
- Woerner, K.; Benjamin, M.R.; Novitzky, M.; Leonard, J.J. Quantifying protocol evaluation for autonomous collision avoidance. Auton. Robot. 2019, 43, 967–991. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Wu, Q.; Zhang, J.; Wu, B.; Wang, Y. Autonomous decision-making scheme for multi-ship collision avoidance with iterative observation and inference. Ocean Eng. 2020, 197, 106873. [Google Scholar] [CrossRef]
- Ni, S.; Wang, N.; Qin, Z.; Yang, X.; Liu, Z.; Li, H. A distributed coordinated path planning algorithm for maritime autonomous surface ship. Ocean Eng. 2023, 271, 113759. [Google Scholar] [CrossRef]
- Perera, L.P. Deep Learning Toward Autonomous Ship Navigation and Possible COLREGs Failures. J. Offshore Mech. Arct. Eng. 2019, 142, 031102. [Google Scholar] [CrossRef]
- He, Y.; Jin, Y.; Huang, L.; Xiong, Y.; Chen, P.; Mou, J. Quantitative analysis of COLREG rules and seamanship for autonomous collision avoidance at open sea. Ocean Eng. 2017, 140, 281–291. [Google Scholar] [CrossRef]
- Woerner, K. Multi-Contact Protocol-Constrained Collision: Avoidance for Autonomous Marine Vehicles. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2016. [Google Scholar]
- Zaccone, R.; Martelli, M. A collision avoidance algorithm for ship guidance applications. J. Mar. Eng. Technol. 2019, 19, 62–75. [Google Scholar] [CrossRef]
- Vagale, A.; Bye, R.T.; Oucheikh, R.; Osen, O.L.; Fossen, T.I. Path planning and collision avoidance for autonomous surface vehicles II: A comparative study of algorithms. J. Mar. Sci. Technol. 2021, 26, 1307–1323. [Google Scholar] [CrossRef]
- Rutkowski, G. Determining Ship’s Safe Speed and Best Possible Speed for Sea Voyage Legs. Trans. Nav. Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 425–430. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Gu, S.; Wen, Y.; Du, Z.; Xiao, C.; Huang, L.; Zhu, M. The review unmanned surface vehicle path planning: Based on multi-modality constraint. Ocean Eng. 2020, 200, 107041–107043. [Google Scholar] [CrossRef]
- Lazarowska, A. Review of Collision Avoidance and Path Planning Methods for Ships Utilizing Radar Remote Sensing. Remote Sens. 2021, 13, 3265. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R.; Greig, A. Review of Collision Avoidance and Path Planning Methods for Ships in Close Range Encounters. J. Navig. 2009, 62, 455–476. [Google Scholar] [CrossRef]
- Li, M.; Mou, J.; Chen, L.; Huang, Y.; Chen, P. Comparison between the collision avoidance decision-making in theoretical research and navigation practices. Ocean Eng. 2021, 228, 108881. [Google Scholar] [CrossRef]
- Wróbel, K.; Gil, M.; Huang, Y.; Wawruch, R. The Vagueness of COLREG versus Collision Avoidance Techniques—A Discussion on the Current State and Future Challenges Concerning the Operation of Autonomous Ships. Sustainability 2022, 14, 16516. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; van Gelder, P.H.A.J. Ship collision avoidance methods: State-of-the-art. Safety Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Jiang, L.; An, L.; Yang, R. Collision-avoidance navigation systems for Maritime Autonomous Surface Ships: A state of the art survey. Ocean Eng. 2021, 235, 109380. [Google Scholar] [CrossRef]
- Gil, M.; Wróbel, K.; Montewka, J.; Goerlandt, F. A bibliometric analysis and systematic review of shipboard Decision Support Systems for accident prevention. Safety Sci. 2020, 128, 104717. [Google Scholar] [CrossRef]
- Zheng, R.; Xie, H.; Yuan, K. Autonomous collision avoidance system in a multi-ship environment based on proximal policy optimization method. Ocean Eng. 2023, 272, 113779. [Google Scholar] [CrossRef]
- Mohanan, M.G.; Salgoankar, A. A survey of robotic motion planning in dynamic environments. Robot. Auton. Syst. 2018, 100, 171–185. [Google Scholar] [CrossRef]
- Jiang, L.; An, L.; Zhang, X.; Wang, C.; Wang, X. A human-like collision avoidance method for autonomous ship with attention-based deep reinforcement learning. Ocean Eng. 2022, 264, 112378. [Google Scholar] [CrossRef]
- Shen, H.; Hashimoto, H.; Matsuda, A.; Taniguchi, Y.; Terada, D.; Guo, C. Automatic collision avoidance of multiple ships based on deep Q-learning. Appl. Ocean Res. 2019, 86, 268–288. [Google Scholar] [CrossRef]
- Hong, S. Maritime Officers’ Strategies for Collision Avoidance in Crossing Situations. J. Ergon. Soc. Korea 2017, 36, 525–533. [Google Scholar] [CrossRef]
- Gao, Q.; Song, L.; Yao, J. RANS Prediction of Wave-Induced Ship Motions, and Steady Wave Forces and Moments in Regular Waves. J. Mar. Sci. Eng. 2021, 9, 1459. [Google Scholar] [CrossRef]
- Borkowski, P. Numerical Modeling of Wave Disturbances in the Process of Ship Movement Control. Algorithms 2018, 11, 130. [Google Scholar] [CrossRef] [Green Version]
- Szlapczynski, R.; Szlapczynska, J. A Target Information Display for Visualising Collision Avoidance Manoeuvres in Various Visibility Conditions. J. Navig. 2015, 68, 1041–1055. [Google Scholar] [CrossRef]
- Chang, K.; Jan, G.E.; Parberry, I. A Method for Searching Optimal Routes with Collision Avoidance on Raster Charts. J. Navig. 2003, 56, 371–384. [Google Scholar] [CrossRef]
- Jones, K.D. Application of a Manœuvre Diagram to Multi-ship Encounters. J. Navig. 1974, 27, 19–27. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. An analysis of domain-based ship collision risk parameters. Ocean Eng. 2016, 126, 47–56. [Google Scholar] [CrossRef]
- Lazarowska, A. A new deterministic approach in a decision support system for ship’s trajectory planning. Expert Syst. Appl. 2017, 71, 469–478. [Google Scholar] [CrossRef]
- Xu, W.; Yin, J.; Hu, J.; Li, K. Ship Automatic Collision Avoidance by Altering Course Based on Ship Dynamic Domain. In Proceedings of the 2016 IEEE Trustcom/BigDataSe/ISPA, Tianjin, China, 23–26 August 2016; pp. 2024–2030. [Google Scholar] [CrossRef]
- Tang, P.; Zhang, R.; Liu, D.; Zou, Q.; Shi, C. Research on Near-Field Obstacle Avoidance for Unmanned Surface Vehicle Based on Heading Window. In Proceedings of the 2012 24th Chinese Control and Decision Conference (CCDC 2012), Taiyuan, China, 23–25 May 2012; pp. 1262–1267. [Google Scholar]
- Zhang, G.; Wang, Y.; Liu, J.; Cai, W.; Wang, H. Collision-Avoidance Decision System for Inland Ships Based on Velocity Obstacle Algorithms. J. Mar. Sci. Eng. 2022, 10, 814. [Google Scholar] [CrossRef]
- Zhao, X.; He, Y.; Huang, L.; Mou, J.; Zhang, K.; Liu, X. Intelligent Collision Avoidance Method for Ships Based on COLRGEs and Improved Velocity Obstacle Algorithm. Appl. Sci. 2022, 12, 8926. [Google Scholar] [CrossRef]
- Tian, Y.; Huang, L.; Xiong, Y.; Li, S. On the velocity obstacle based automatic collision avoidance with multiple target ships at sea. In Proceedings of the 2015 International Conference on Transportation Information and Safety (ICTIS 2015), Wuhan, China, 25–28 June 2015; pp. 468–472. [Google Scholar]
- Zhang, W.; Yan, C.; Lyu, H.; Wang, P.; Xue, Z.; Li, Z.; Xiao, B. COLREGS-based Path Planning for Ships at Sea Using Velocity Obstacles. IEEE Access 2021, 9, 32613–32626. [Google Scholar] [CrossRef]
- Cho, Y.; Han, J.; Kim, J.; Lee, P.; Park, S. Experimental validation of a velocity obstacle based collision avoidance algorithm for unmanned surface vehicles. IFAC-Pap. 2019, 52, 329–334. [Google Scholar] [CrossRef]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; L Huntsberger, T. Safe Maritime Autonomous Navigation With COLREGS, Using Velocity Obstacles. IEEE J. Ocean. Eng. 2014, 39, 110–119. [Google Scholar] [CrossRef]
- Abdelaal, M.; Fränzle, M.; Hahn, A. Nonlinear Model Predictive Control for trajectory tracking and collision avoidance of underactuated vessels with disturbances. Ocean Eng. 2018, 160, 168–180. [Google Scholar] [CrossRef]
- Chen, L.; Huang, L.; Xiong, Y. Collision avoidance control of multi-ships on sea based on optimal control. China Saf. Sci. J. (CSSG) 2014, 24, 15–21. [Google Scholar]
- Wang, J.; Wang, J.; Zhao, R.; Liang, X.; Wei, Q. Collision Avoidance Strategies for Unmanned Surface Vehicles Based on Probabilistic Game Theory Framework. In Proceedings of the OCEANS 2022-Chennai, Chennai, India, 21–24 February 2022; pp. 1–6. [Google Scholar]
- Lisowski, J.; Mohamed-Seghir, M. Comparison of Computational Intelligence Methods Based on Fuzzy Sets and Game Theory in the Synthesis of Safe Ship Control Based on Information from a Radar ARPA System. Remote Sens. 2019, 11, 82. [Google Scholar] [CrossRef] [Green Version]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Liu, W.; Qiu, K.; Yang, X.; Wang, R.; Xiang, Z.; Wang, Y.; Xu, W. COLREGS-based collision avoidance algorithm for unmanned surface vehicles using modified artificial potential fields. Phys. Commun. 2023, 57, 101980. [Google Scholar] [CrossRef]
- Xue, Y.; Lee, B.S.; Han, D. Automatic collision avoidance of ships. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2009, 1, 33–46. [Google Scholar] [CrossRef] [Green Version]
- Xue, Y.; Clelland, D.; Lee, B.S.; Han, D. Automatic simulation of ship navigation. Ocean Eng. 2011, 38, 2290–2305. [Google Scholar] [CrossRef]
- Zhang, G.; Han, J.; Li, J.; Zhang, X. APF-based intelligent navigation approach for USV in presence of mixed potential directions: Guidance and control design. Ocean Eng. 2022, 260, 111972. [Google Scholar] [CrossRef]
- Huang, D.; Liu, Z.; Wang, X. Artificial potential field and ship maneuverability based collision avoidance path planning. In Proceedings of the 2020 Chinese Automation Congress (CAC 2020), Shanghai, China, 6–8 November 2020; Volume 1, pp. 2490–2495. [Google Scholar]
- Lee, M.; Nieh, C.; Kuo, H.; Huang, J. A collision avoidance method for multi-ship encounter situations. J. Mar. Sci. Technol. 2020, 25, 925–942. [Google Scholar] [CrossRef]
- Lyu, H.G.; Yin, Y. Ship’s trajectory planning for collision avoidance at sea based on modified artificial potential field. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE 2017), Shanghai, China, 29–31 December 2017; pp. 351–357. [Google Scholar]
- Ge, S.S.; Cui, Y.J. New potential functions for mobile robot path planning. IEEE Trans. Robot. Autom. 2000, 16, 615–620. [Google Scholar] [CrossRef] [Green Version]
- Gao, P.; Zhou, L.; Zhao, X.; Shao, B. Research on ship collision avoidance path planning based on modified potential field ant colony algorithm. Ocean Coast. Manag. 2023, 235, 106482. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, J.; Hirdaris, S.; Zhang, M.; Tian, W. An interpretable knowledge-based decision support method for ship collision avoidance using AIS data. Reliab. Eng. Syst. Safe 2023, 230, 108919. [Google Scholar] [CrossRef]
- Ahn, J.; Rhee, K.; You, Y. A study on the collision avoidance of a ship using neural networks and fuzzy logic. Appl. Ocean Res. 2012, 37, 162–173. [Google Scholar] [CrossRef]
- Zhai, P.; Zhang, Y.; Shaobo, W. Intelligent Ship Collision Avoidance Algorithm Based on DDQN with Prioritized Experience Replay under COLREGs. J. Mar. Sci. Eng. 2022, 10, 585. [Google Scholar] [CrossRef]
- Simsir, U.; Amasyal, M.F.; Bal, M.; Elebi, U.B.; Ertugrul, S. Decision support system for collision avoidance of vessels. Appl. Soft Comput. 2014, 25, 369–378. [Google Scholar] [CrossRef]
- Tsou, M. Multi-target collision avoidance route planning under an ECDIS framework. Ocean Eng. 2016, 121, 268–278. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R. Path-planning algorithm for ships in close-range encounters. J. Mar. Sci. Technol. 2010, 15, 395–407. [Google Scholar] [CrossRef]
- Tsou, M.; Kao, S.; Su, C. Decision Support from Genetic Algorithms for Ship Collision Avoidance Route Planning and Alerts. J. Navig. 2010, 63, 167–182. [Google Scholar] [CrossRef]
- Kuczkowski, L.; Smierzchalski, R. Path planning algorithm for ship collisions avoidance in environment with changing strategy of dynamic obstacles. In Trends in Advanced Intelligent Control, Optimization and Automation; Springer: Cham, Switzerland, 2017; pp. 641–650. [Google Scholar]
- Liu, H.; Deng, R.; Zhang, L. The application research for ship collision avoidance with hybrid optimization algorithm. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA 2016), Ningbo, China, 1–3 August 2016; Volume 1, pp. 760–767. [Google Scholar]
- Zheng, J.; Wu, J.; Ma, Y.; Long, Y. A hybrid optimization algorithm of simulated annealing and particle swarm for unmanned surface vessel path planning. Period. Ocean. Univ. China 2016, 46, 116–122. [Google Scholar]
- Blindheim, S.; Rokseth, B.; Johansen, T.A. Autonomous machinery management for supervisory risk control using particle swarm optimization. J. Mar. Sci. Eng. 2023, 11, 327. [Google Scholar] [CrossRef]
- Lazarowska, A. Ship’s trajectory planning for collision avoidance at sea based on ant colony optimisation. J. Navig. 2015, 68, 291–307. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Zhang, X.; Shang, Z.; Guo, S.; Du, Y. A decision-making method for ship collision avoidance based on improved cultural particle swarm. J. Adv. Transp. 2021, 2021, 1–31. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, J.; Zhang, M.; Zhang, D. Collision avoidance decision-making based on particle swarm optimization and genetic algorithm. J. Navig. China 2020, 43, 1–6+28. [Google Scholar]
- Hu, Y.; Meng, X.; Zhang, Q.; Park, G. A real-time collision avoidance system for autonomous surface vessel using fuzzy logic. IEEE Access 2020, 8, 108835–108846. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Hannan, M.A.; Oraby, M.Y.; Maimun, A. COLREGs Compliant Fuzzy-Based Collision Avoidance System for Multiple Ship Encounters. J. Mar. Sci. Eng. 2021, 9, 790. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, X.; Yang, Z.; Bashir, M.; Lee, K. Collision Avoidance For Autonomous Ship Using Deep Reinforcement Learning And Prior-Knowledge-Based Approximate Representation. Front. Mar. Sci. 2023, 9, 1084763. [Google Scholar] [CrossRef]
- Guan, W.; Zhao, M.; Zhang, C.; Xi, Z. Generalized Behavior Decision-Making Model for Ship Collision Avoidance via Reinforcement Learning Method. J. Mar. Sci. Eng. 2023, 11, 273. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, X.; Du, Y.; Zheng, Y.; Cao, Z. Path Planning of Coastal Ships Based on Optimized DQN Reward Function. J. Mar. Sci. Eng. 2021, 9, 210. [Google Scholar] [CrossRef]
- Wang, W.; Huang, L.; Liu, K.; Wu, X.; Wang, J. A COLREGs-Compliant Collision Avoidance Decision Approach Based on Deep Reinforcement Learning. J. Mar. Sci. Eng. 2022, 10, 944. [Google Scholar] [CrossRef]
- Chen, C.; Chen, X.; Ma, F.; Zeng, X.; Wang, J. A knowledge-free path planning approach for smart ships based on reinforcement learning. Ocean Eng. 2019, 189, 106299. [Google Scholar] [CrossRef]
- Xue, D.; Wu, D.; Yamashita, A.S.; Li, Z. Proximal policy optimization with reciprocal velocity obstacle based collision avoidance path planning for multi-unmanned surface vehicles. Ocean Eng. 2023, 273, 114005. [Google Scholar] [CrossRef]
- Bi, X.; Jia, C.; Wu, Z. Opportunity and actions taken of ship’s changing speed collision-avoidance. J. Dalian Marit. Univ. 2004, 01, 26–28. [Google Scholar]
- Ma, W.Y.; Yang, J.X. Collision Avoidance Strategy Optimization of Ship’s Speed Alteration with Bacterial Foraging Algorithm. Appl. Mech. Mater. 2013, 278–280, 1318–1322. [Google Scholar] [CrossRef]
- Yu, J.; Liu, Z.; Bu, R.; Gao, X.; Li, W. Artificial Physics Optimization Algorithm for Collision-avoidance Through Speed Alteration. Navig. China 2019, 42, 40–43. [Google Scholar]
- Su, L.; Qin, X.; Liu, Z.; Zhang, Z. Intelligent collision avoidance decision for single ship considering ship maneuverability. In Proceedings of the 2019 9th International Conference on Information Science and Technology (ICIST 2019), Hulunbuir, China, 2–5 August 2019; Volume 1, pp. 164–168. [Google Scholar]
- Hu, Y.; Zhang, A.; Tian, W.; Zhang, J.; Hou, Z. Multi-Ship Collision Avoidance Decision-Making Based on Collision Risk Index. J. Mar. Sci. Eng. 2020, 8, 640. [Google Scholar] [CrossRef]
- Nakamura, S.; Okada, N.; Kuwahara, S.; Kutsuna, K.; Nakashima, T.; Ando, H. Study on Automatic Collision Avoidance System and Method for Evaluating Collision Avoidance Manoeuvring Results. J. Phys. Conf. Ser. 2019, 1357, 12033. [Google Scholar] [CrossRef]
- Hirayama, K.; Miyake, R.; Shiota, T.; Okimoto, T. DSSA+: Distributed Collision Avoidance Algorithm in an Environment where Both Course and Speed Changes are Allowed. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 117–124. [Google Scholar] [CrossRef] [Green Version]
- Perera, L.P.; Carvalho, J.P.; Soares, C.G. Fuzzy logic based decision making system for collision avoidance of ocean navigation under critical collision conditions. J. Mar. Sci. Technol. 2011, 16, 84–99. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Krata, P.; Szlapczynska, J. Ship domain applied to determining distances for collision avoidance manoeuvres in give-way situations. Ocean Eng. 2018, 165, 43–54. [Google Scholar] [CrossRef]
- Kim, D.; Kim, J.; Kim, J.; Im, N. Development of ship collision avoidance system and sea trial test for autonomous ship. Ocean Eng. 2022, 266, 113120. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, D.; Yan, X.; Haugen, S.; Guedes Soares, C. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs. Ocean Eng. 2015, 105, 336–348. [Google Scholar] [CrossRef]
- Szlapczynski, R. A New Method of Ship Routing on Raster Grids, with Turn Penalties and Collision Avoidance. J. Navig. 2006, 59, 27–42. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Krata, P.; Szlapczynska, J. A Ship Domain-Based Method of Determining Action Distances for Evasive Manoeuvres in Stand-On Situations. J. Adv. Transp. 2018, 2018, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Chen, L.; van Gelder, P.H.A.J. Generalized velocity obstacle algorithm for preventing ship collisions at sea. Ocean Eng. 2019, 173, 142–156. [Google Scholar] [CrossRef]
- Johansen, T.A.; Cristofaro, A.; Perez, T. Ship Collision Avoidance Using Scenario-Based Model Predictive Control. IFAC-Pap. 2016, 49, 14–21. [Google Scholar] [CrossRef]
- Johansen, T.A.; Perez, T.; Cristofaro, A. Ship Collision Avoidance and COLREGS Compliance Using Simulation-Based Control Behavior Selection With Predictive Hazard Assessment. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3407–3422. [Google Scholar] [CrossRef] [Green Version]
- Kufoalor, D.K.M.; Johansen, T.A.; Brekke, E.F.; Hepsø, A.; Trnka, K. Autonomous maritime collision avoidance: Field verification of autonomous surface vehicle behavior in challenging scenarios. J. Field Robot. 2020, 37, 387–403. [Google Scholar] [CrossRef] [Green Version]
- Eriksen, B.; Bitar, G.; Breivik, M.; Lekkas, A. Hybrid Collision Avoidance for ASVs Compliant With COLREGs Rules 8 and 13–17. Front. Robot. AI 2020, 7, 11. [Google Scholar] [CrossRef]
- Eriksen, B.H.; Breivik, M.; Wilthil, E.F.; Flåten, A.L.; Brekke, E.F. The branching-course model predictive control algorithm for maritime collision avoidance. J. Field Robot. 2019, 36, 1222–1249. [Google Scholar] [CrossRef] [Green Version]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Raeburn, C.; Salter, I.; Pekcan, C. A Multiobjective Optimization Approach for COLREGs-Compliant Path Planning of Autonomous Surface Vehicles Verified on Networked Bridge Simulators. IEEE Trans Intell. Transp. Syst. 2020, 21, 1167–1179. [Google Scholar] [CrossRef] [Green Version]
- Tan, G.; Zou, J.; Zhuang, J.; Wan, L.; Sun, H.; Sun, Z. Fast marching square method based intelligent navigation of the unmanned surface vehicle swarm in restricted waters. Appl. Ocean Res. 2020, 95, 102018. [Google Scholar] [CrossRef]
- Chen, L.; Huang, L. Ship Collision Avoidance Path Planning by PSO Based on Maneuvering Equation. In Future Wireless Networks and Information Systems; Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2012; Volume 1, pp. 675–682. [Google Scholar]
- Zhang, Y.; Shi, G.; Liu, H.; Li, W. Decision supporting for ship collision avoidance in restricted waters. Int. J. Simul. Process Model. 2020, 15, 40–51. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, J.; Zhang, M.; Li, T. Anti-collision Decision Making by Course Alteration and Speed Change under COLREGs. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS 2019), Liverpool, UK, 14–17 July 2019; pp. 25–31. [Google Scholar]
- Xu, X.; Pan, W.; Huang, Y.; Zhang, W. Dynamic Collision Avoidance Algorithm for Unmanned Surface Vehicles via Layered Artificial Potential Field with Collision Cone. J. Navig. 2020, 73, 1306–1325. [Google Scholar] [CrossRef]
- Song, J.; Hao, C.; Su, J. Path planning for unmanned surface vehicle based on predictive artificial potential field. Int. J. Adv. Robot. Syst. 2020, 17, 1738075837. [Google Scholar] [CrossRef] [Green Version]
- Guo, S.; Zhang, X.; Zheng, Y.; Du, Y. An Autonomous Path Planning Model for Unmanned Ships Based on Deep Reinforcement Learning. Sensors 2020, 20, 426. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, X.; Lu, Y.; Liu, G.; Cai, P.; Zhang, W. COLREGs-abiding hybrid collision avoidance algorithm based on deep reinforcement learning for USVs. Ocean Eng. 2022, 247, 110749. [Google Scholar] [CrossRef]
- Shen, H. Collision Avoidance Navigation and Control for Unmanned Marine Vessels Based on Reinforcement Learning. Ph.D. Thesis, Dalian Maritime University, Dalian, China, 2018. [Google Scholar]
- Cockcroft, A.N.; Lameijer, J.N.F. A Guide to the Collision Avoidance Rules, 7th ed.; Butterworth-Heinemann: Oxford, UK, 2012; ISBN 978-0-08-097170-4. [Google Scholar]
- Liu, J.; Zhang, J.; Yan, X.; Soares, C.G. Multi-ship collision avoidance decision-making and coordination mechanism in Mixed Navigation Scenarios. Ocean Eng. 2022, 257, 111666. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Factor/Content | Categories |
|---|---|---|
| P1 | Classification of waters | Open waters (OW) and congested waters (CW) |
| P2 | Encounter situation | Two-ship encounters (TE) and multi-ship encounters (ME) |
| P3 | Types of obstacles | Static obstacles (SOs), dynamic obstacles (DOs), and mixed obstacles (MOs) |
| P4 | Compliance with COLREGs | Yes (Y) and no (N) |
| P5 | Environmental disturbance | Yes (Y) and no (N) |
| P6 | Real-time performance | High (H), middle (M), and low (L) |
| P7 | Ship maneuverability | Yes (Y) and no (N) |
| P8 | Determination of collision risk | CPA, ship domain (SD), and collision risk index (CRI) |
| P9 | Range or limit of altering course/speed | / |
| P10 | Mechanism of altering course/speed | / |
| Method | Refs. | P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 | P9 | P10 | Limitations |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Geometric analysis | [53] | CW | TE/ME | MO | Y | N | H | N | SD | Discrete solution space | Trajectory base | The target ships keep course and speed. |
| [54] | OW | TE | DO | Y | N | / | Y | CPA | +0.1°/step | Course alteration function | Only one target ship, without wind, waves, currents, and consideration of other disturbances. | |
| [55] | CW | / | SO | N | N | H | Y | / | / | Course alteration function | Wind and current are not considered; only static obstacle avoidance. | |
| VO | [58] | OW | ME | MO | N | N | / | Y | CPA | / | Goal-directed behavior | It does not consider the weather, sea conditions, and COLREGs constraints. |
| [56] | OW | TE/ME | MO | Y | Y | H | Y | CPA | / | Goal-directed behavior | It does not consider the actual map, steering return angle, and time. | |
| [23] | OW | ME | DO | Y | N | / | N | / | −90°~90° | Goal-directed behavior | It can only be used in open waters, and studies in restricted waters and more complex environments are required. | |
| MPC | [62] | OW | TE | MO | Y | N | H | Y | SD | / | Discrete variation | The algorithm only considers the CA between a single ship and point-like static obstacles. |
| Optimal control | [63] | OW | ME | DO | N | Y | L | Y | CPA and SD | −30°~30° | Continuous change | The calculation time is long, and precise initial conditions and constraints are required. |
| GT | [64] | OW | TE/ME | DO | N | N | H | Y | / | / | Discrete variation | It does not consider the impact of the COLREGs and environmental disturbances. |
| APF | [67] | OW | TE/ME | MO | Y | N | H | Y | SD | / | Objective function guide | Natural conditions and static obstacles are not considered. |
| [71] | OW | TE | DO | Y | N | M | Y | / | −35°~35° | Objective function guide | The impact of wind, waves, and currents on the ship is not considered. | |
| APF | [72] | OW | TE/ME | MO | N | Y | / | Y | SD and CRI | −90°~90° | Objective function guide | The influence of the shallow-water effect and shore-wall effect on ships is not considered. |
| [14] | CW | ME | MO | Y | N | H | Y | CPA and SD | −180°~180° | Objective function guide | It does not re-plan to the original route, and route optimization is not considered. | |
| [68,69] | CW | TE/ME | MO | Y | Y | / | Y | CPA | Cubic spline smoothing | Goal-guided behavior | It does not consider weather conditions, extreme encounter cases, change of speed, or reversing in emergencies. | |
| Knowledge-based system | [29] | OW | TE | DO | Y | N | / | Y | FSCR, FTCS, and FTID | / | Course alteration function | Only the avoidance actions of stand-on ships are studied, and further research is needed on give-way ships. |
| NN | [78] | OW | ME | MO | Y | N | H | N | CPA | −12°~12° | Discrete variation | It cannot be used for actual CA and does not consider restricted waters. |
| GA | [82] | CW | TE/ME | MO | Y | N | M | N | CPA | −30°~90° | Course alteration function | It will create an avoidance route that is not in line with nautical experience. |
| SIA | [84] | OW | TE | DO | Y | N | / | N | CRI | 30°~80° | Objective function guide | The impact of wind, waves, and currents on the ship is not considered. |
| [85] | CW | TE | MO | Y | N | / | N | CRI | / | Right turn change | The impact of wind, waves, and currents on the ship is not considered. | |
| [87] | CW | TE/ME | MO | Y | N | H | N | CRI | / | Objective function guide | The shallow-water effect and the shore effect on ships are not considered. | |
| [88] | OW | TE | DO | Y | N | / | N | CRI | −35°~35° | Objective function guide | It plans path to the next waypoint after turning, without optimization. | |
| SIA and EA | [89] | OW | ME | DO | Y | N | H | N | CRI | 30°~60° | Right-turn change | It assumes that all target ships (TSs) obey the COLREGs, and CA action information of TSs is obtained in real time. |
| FL | [90] | OW | ME | DO | Y | Y | / | Y | CPA | −35°~35° | Course alteration function | The accuracy of the results needs to be improved. |
| DRL | [45] | CW | ME | MO | Y | N | / | Y | SD | Action at∈{−Δψ, 0, Δψ} Δψ > 0 | States, actions, and a reward function | It considers simple restricted waters with an isolated square obstacle and 3 TSs’ reactive collision avoidance, rather than a smart action in the far range. |
| Method | Refs. | P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 | P9 | P10 | Limitations |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Geometric analysis | [108] | OW | ME | DO | Y | N | / | Y | CPA | [30°~60°] Speed: −5%/step | Turn right and gradually change | Simulation results do not comply with the COLREGs. |
| [106,110] | CW | TE | MO | Y | Y | / | Y | SD | [−30°~30°] | / | Further research on more ship models is needed. | |
| GVO | [111] | OW | ME | DO | Y | N | / | Y | CPA | [−90°~90°} [0~1] m/s | Utilize UO set to find the best solution | Big difference in predicted trajectory and actual nonlinear trajectory of the ship, leading to failure. |
| MPC | [112,113,114] | CW | TE/ME | MO | Y | Y | H | Y | CRI | [−90°~90°] Speed: v, 0.5 v, 0 | Discrete variation | The model accuracy needs to be high, and violation of the COLREGs by target ships is not considered. |
| BC-MPC | [115,116] | CW | ME | MO | Y | N | H | Y | CPA | Search space with a finite number of trajectories | Discrete set of SOG and course accelerations | Simple static obstacles, and the trajectory is not smooth. |
| LAPF-CC | [122] | CW | TE/ME | MO | Y | N | H | Y | Collision cone | FLAPF−CC = Fmax cosδ MLAPF−CC = Mmaxδ/π δ: angle between OS speed and resultant force, with δ ≤ π | Speed and heading are adjusted by driving force (maximum Fmax) and torque (maximum Mmax), respectively | It is difficult to handle complex dynamic environments. The coupling effect of speed change and heading change on CA is not considered |
| PAPF | [123] | / | / | SO | N | N | H | N | / | Maximum turning angle 20° Vmin→Vmax according to the turning angle threshold | straightway acceleration, and feasible cornering and turning-around deceleration | Only static obstacles, without considering the COLREGs |
| DRL | [125] | CW | TE/ME | MO | Y | N | H | Y | CPA and SD | Rudder angle [−35°~35°] Thrust range [−50 N~50 N] | Goal-guided behavior | Static obstacles are simplified as circles, and multi-ship continuous CA is a problem. |
| DRL and APF | [124] | OW | TE/ME | DO | Y | N | H | N | / | steering = Tanh(asteering)Dmax Dmax: 35°, heading change [−35°~35°] shifting = tanh(ashifting)Vmax Vmax: 15 kn, Speed change [−15~15] kn speed [0~30] kn | Goal-guided behavior | The influence of the ship motion model and environmental interference on the algorithm is not considered. |
| GA | [109] | CW | TE | MO | Y | Y | / | Y | SD | / | / | The amount of calculation is large, and the real-time performance is difficult to guarantee. |
| SIA | [117] | CW | ME | DO | Y | / | H | N | CPA | Speed: 0, v/2, 2 v | Gradual change | Lack of comparison with other multi-objective optimization algorithms, cannot be determined as optimal. |
| [119] | CW | TE | MO | Y | N | / | Y | / | [−30°~30°] | Goal-guided behavior | A ship’s dynamic characteristics is not fully considered | |
| DL and A* | [126] | CW | TE/ME | MO | Y | Y | H | Y | SD | Speed: Divide the speed of the ship into four sections and gradually reduce the speed | Discrete variation | Coordinated CA between ships and information on unknown obstacles are not considered. |
| Random Searching | [104] | OW | ME | DO | Y | N | H | Y | CPA | [−45°~45°] Speed: −8 kn~8 kn (2 kn/step) | Discrete variation | It is necessary to set the steering and variable speed weight function. |
| FMM | [118] | CW | TE | MO | Y | Y | / | Y | CPA | [−30°~30°] | Goal-guided behavior | Obstacles with irregular motion need to be predicted. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, H.; Hao, Z.; Li, J.; Li, G.; Sun, X.; Zhang, G.; Yin, Y.; Zhao, Y.; Zhang, L. Ship Autonomous Collision-Avoidance Strategies—A Comprehensive Review. J. Mar. Sci. Eng. 2023, 11, 830. https://doi.org/10.3390/jmse11040830
Lyu H, Hao Z, Li J, Li G, Sun X, Zhang G, Yin Y, Zhao Y, Zhang L. Ship Autonomous Collision-Avoidance Strategies—A Comprehensive Review. Journal of Marine Science and Engineering. 2023; 11(4):830. https://doi.org/10.3390/jmse11040830
Chicago/Turabian StyleLyu, Hongguang, Zengrui Hao, Jiawei Li, Guang Li, Xiaofeng Sun, Guoqing Zhang, Yong Yin, Yanjie Zhao, and Lunping Zhang. 2023. "Ship Autonomous Collision-Avoidance Strategies—A Comprehensive Review" Journal of Marine Science and Engineering 11, no. 4: 830. https://doi.org/10.3390/jmse11040830