1. Introduction
Generally, large water bodies may be divided into small seas and vast oceans, which together cover about 71% of the earth’s surface. Most ocean areas have not been fully explored yet. It is of paramount significance to explore these oceanic areas. In this regard, the IoUT has emerged as a promising technology to support underwater discovery and exploration [
1]. The IoUT is considered a remarkable revolution in communication and computing. It is a smart network of underwater objects such as sensor nodes, cluster heads, cameras, autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs), autonomous surface vehicles (ASVs), buoys, ships, etc. which supports various maritime applications. The IoUT objects are fixed at one position or can move from one position to another to collect information. This information is then transmitted through digitally linked underwater objects, including the gateway or water surface buoys. These smart objects can sense, process, and transmit data to the intended destination. IoUT systems are generally used to measure specific chemical, biological, or physical ocean parameters such as water quality, pH, turbidity, humidity, pressure, and temperature to provide real-time and historical data. These objects can also be used to find hidden treasure, oil and gas spills, minerals, metals, and corals. Moreover, other devices, such as mobile gateways, base stations, satellites, etc., are used to extend the communication range of the IoUT. However, there are several critical concerns regarding the design, development, and implementation of IoUT systems. The major challenges are communication, battery charging, energy storage, reliability, security, mobility, and dynamic node topology. In the last few years, several research studies have been devoted to the IoUT, some of which [
2,
3,
4,
5] have reported some of its features. The IoUT has a wide range of applications, including environmental protection, ocean observation, early warning generation, deep-sea exploration, underwater communication, submarine tracking, oil spill detection, search and rescue, marine transportation, naval network surveillance, and tactical surveillance. For these applications, networks of permanent cabled observation systems are being deployed in the ocean. In particular, underwater observatory systems are deployed for long term real-time observation and monitoring of natural phenomena such as offshore seismicity and tsunamis. Similar to wireless networks in terms of their architectural components and applications, these cabled networks can also monitor seabed movements, water circulation, salinity, pH, temperature, etc. However, in this review, we will only focus on wireless networks. Even though there are some similarities between the Internet of Things (IoT) and the IoUT, such as their structure and operations, the latter is facing different technological challenges in terms of communication media, computational restrictions, channel characteristics, channel type, energy resources, etc. The channel characteristics define the technical factors which impact the IoUT, such as node mobility, pressure, turbulence, propagation speed, etc., while channel types represent the type of medium utilized in the IoUT, such as magnetic induction (MI), optical, acoustic, or radio frequency (RF) waves.
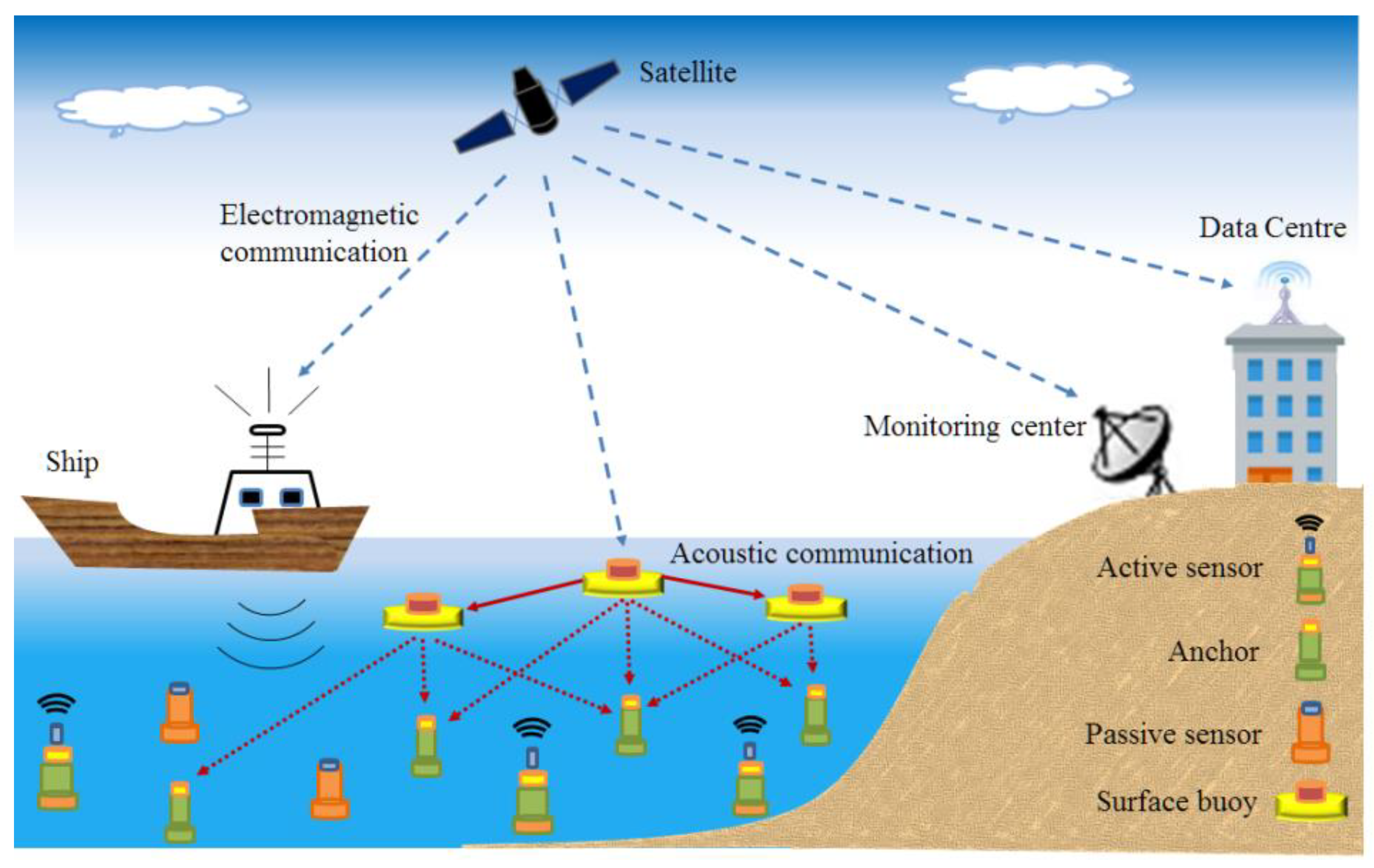
Figure 1 presents an overview of an IoUT system based on sensor nodes which enable the use of smart applications in a data center via EM or acoustic links.
An underwater wireless sensor network (UWSN), which has a distinct network architecture, is regarded is the key enabler network for the IoUT.
Figure 2 presents the network architecture of an UWSN, comprising main elements, i.e., sensors, placed in shallow or deep water. The purpose of the sensors is to gather data and transfer it to elements such as buoys, ships, ASVs, or AUVs via acoustic signals, which, in turn, transfer the data to a remote monitoring center via radio signals. The monitoring center then carries out analyses of the obtained oceanic data. By using these smart devices, UWSNs support various applications such as ecological monitoring, seismic predictions, marine species tracking, disaster prevention, and water quality monitoring [
4]. However, this approach is facing several critical concerns, including long propagation delays, limited bandwidth, and ultra-low reliability. Several studies [
6] have highlighted further challenges, such as dynamic node topologies, communication, reliability, battery charging, delays, and real-time monitoring, etc.
Table 1 summarizes the characteristics of (and issues facing) the IoUT. To overcome these issues, two data acquisition strategies have been proposed [
7,
8]. One method is to deploy flexible AUVs to collect data from IoUT nodes, while the second employs multi-hop transfer approaches. In [
9], the authors propose an energy-efficient data collection strategy using AUVs. This strategy could substantially enhance the life span of the IoUT, as it offers high age of information (AoI) [
10]. Similarly, data privacy and security is another critical concern faced by IoUT systems, as malicious node could be used to attack digital infrastructure and steal sensitive information. Several studies [
6,
11] have identified data confidentiality and authenticity as major challenges in IoUT systems. Thus, research should address privacy-preserving and enhanced security mechanisms to ensure reliable and secure communication across the IoUT network. In their study, Gopinath et al. [
6] addressed privacy and security issues in the IoUT, proposing an encryption scheme to support secure data transmission.
In the literature, several methods have been proposed to explore and monitor the ocean environment, and various testbed designs have been proposed for the successful implementation of the IoUT [
13,
14,
15]. Some projects based on software-defined networks have been implemented [
16,
17]. In Horizon 2020, scientists developed lightweight, cost-efficient acoustic devices and robotic structures for use with the IoUT [
18]. SK Telecom, in collaboration with Hoseo University, South Korea, designed an underwater data transfer system using sound waves [
19]. This project was implemented to support a novel IoUT monitoring system. Several naval forces have designed military IoUT (MIoUT) systems to ensure connectivity among AUVs, ships, and submarines. Furthermore, the research team from Senses Lab [
20] has focused on IoUT system design. Researchers are also focusing on IoT communication protocols for underwater drones. In [
1], the author proposed a novel architecture for the IoUT and discussed its principle and key differences with the IoT. That study also addresses the applications of and challenges facing the IoUT. Furthermore, Argo, a global collaborative project, has been successfully implemented to monitor yearly fluctuations in ocean parameters and climate change [
21]. It includes buoys which can measure water pressure, temperature, and conductivity. Celik et al. [
22] created a hybrid optoacoustic network intended to overcome underwater networking issues. Several other studies have focused on underwater communication to ensure robustness and enhanced energy efficiency and network capacity. Privacy and security concerns are also critical in IoUT systems. IoUT objects are vulnerable to denial-of-service attacks, wormholes, reconnaissance, Sybil, spoofing, jamming, flooding, and eavesdropping. Yisa et al. [
23] briefly discussed security and privacy challenges in UWSN and IoUT. The authors of [
24] outlined key enabling technologies, protocols, and localization for UWSNs and the IoUT. In [
25], the authors comprehensively discussed the benefits of and challenges facing the IoUT and proposed mitigative solutions. In
Table 2, we have summarized different studies on the IoUT. The complete layout of this study is shown in
Figure 3.
7. IoUT Challenges, Solutions, and Future Research Directions
The research studies described herein have highlighted several challenges facing the IoUT. These challenges are mainly due to the differences between terrestrial wireless sensor networks (TWSNs) and UWSNs. Firstly, UWSNs rely on acoustic waves. Secondly, the speed of acoustic channels is lower than that of radio communication due to narrow bandwidth, which makes end-to-end delay a critical issue for UWSNs. Thirdly, UWSN has a longer transmission distance than TWSN, giving rise to interference.
Moreover, the IoUT also faces critical issues in terms of the dynamic topology of the ocean, energy efficiency, the unstable underwater environment, and low link reliability.
Table 5 summarizes the differences between TWSNs and UWSNs. Several studies [
1,
5,
110,
111,
112] have highlighted issues such as reliability, dynamic topology, the dynamic underwater environment, energy consumption, narrow bandwidth, channel overhead, data transmission, handover prediction, and long propagation delay. Below, we outline several critical challenges facing the IoUT.
7.1. Communication
Different technologies are used for communication in underwater environments, such as optical, RF, and acoustic waves. The use of EM waves including radio waves predominates in communication technologies outside water, as they provide high bandwidth, low power, and longer transmission range. In contrast, EM waves suffer from absorption and limited transmission range in seawater. To be used under water, EM waves need a great deal of power and large antennas. Acoustic waves show better performance under water, achieving transmission distances of over a hundred kilometers. Acoustic waves are also used to achieve omnidirectional communication. However, this approach suffers from low data rates, path loss, noise, multipath, Doppler spread, and high propagation delay.
Optical waves have some distinctive properties and features compared to acoustic or RF waves. Their use is limited to short distances, but they offer higher data rates, i.e., in Gbps. OWC systems have cost-efficient architectures and are simple to deploy. A recent study investigated the multipath attenuation effect in an optical communication-based IoUT network [
113]. Hybrid communication technologies for IoUT networks represent a promising field of research. Such technology could enhance the reliability, battery life, and transmission speeds of IoUT systems.
Table 6 summarizes the differences between various underwater communication technologies.
7.2. Energy Storage and Consumption
Energy storage and utility are critical concerns in TWSN, UWSN, and the IoUT. In the IoUT, acoustic and optical communication channels require significantly more power than RF communication. IoUT nodes are designed with limited memory space, computational capacity, and battery power. These nodes require a lot of power to collect, process, and transfer data. Moreover, energy harvesting is difficult due to the impossibility of using solar power in the IoUT environment. Due to the natural behavior of the IoUT environment, it is difficult to maintain or recharge such systems. This has the potential to reduce battery life and cause data loss. Conventional batteries are unable to satisfy these demands and require regular servicing. As traditional energy sources and optimization methods cannot satisfy the energy requirements of IoUT, energy-efficient algorithms are needed to enhance the lifetime of networks. Energy sources are usually limited for IoUT nodes. Such sensors are equipped with batteries with limited energy capacities [
114]. In an underwater environment, it is risky to recharge or replace batteries. Consequently, low battery endurance can result in node failure, and underwater missions may be delayed or stopped. Thus, researchers are looking for alternative solutions for energy harvesting in IoUT networks. To overcome these energy challenges, wireless power transfer techniques or solar energy [
62] can be used to prolong the lifespans of IoUT networks. Additionally, researchers have suggested deploying battery-less nodes, WPT, and autonomous recharging methods to overcome the aforementioned energy problems.
7.3. Mobility and Reliability
Generally, IoUT networks include static and dynamic nodes. Static nodes have a fixed location while dynamic nodes can move from one position to another. However, the motion of water particles, sediment formation, internal waves, and water currents severely influence the location and topology of underwater sensor nodes. These mobility challenges are more critical in shallow water than in deep water. Such challenges tend to result in higher latencies and broken connectivity, leading to delays, data transmission errors, or the failure of the network. Thus, researchers are focusing on novel mobility models to tackle these challenges.
7.4. Transmission Medium
Communication technologies such as EM waves, acoustic, radio, and optical waves each have distinct characteristics in terms of underwater transmission distance. For instance, acoustic signals are mostly preferred for longer transmission ranges in underwater settings. However, acoustic signals are useful for low data rate applications. Meanwhile, optical waves are emerging as a promising alternative due to their enhanced data rates. However, optical waves also suffer from low transmission range and strict line-of-sight (LOS) requirements. The aforementioned factors show that the transmission range for IoUT networks must be considered for any particular application scenario. For example, optical communication can be considered for applications with high data rates and low latency for short distances. On the other hand, acoustic communication can be used for long-range applications with higher latency and lower data rates.
7.5. Latency
Latency is a critical concern for the successful implementation of IoUT. Currently, IoUT systems mostly use acoustic signals with low transmission speeds for underwater communication, in contrast to the terrestrial IoT. This has a severe impact on the real-time deployment of the IoUT. In contrast, optical communication systems can ensure real-time deployment of the IoUT due to the lower latencies that they offer. However, optical modems for the IoUT require considerable further study.
7.6. Sparse and High-Maintenance Sensing Devices in the IoUT
IoUT sensing devices are sparsely distributed, and environmental conditions severely impact their performance. The nature of the ocean and sparse deployment result in high maintenance costs for IoUT networks. Explicitly, maintenance should tackle the challenges of erosion, corrosion, sediments, and pollution. A compelling approach to lower the maintenance costs of IoUT networks is to introduce self-manageable capabilities [
115] such as self-evaluation, self-adjustment, self-configuration, self-storage, self-charging, and autonomous reports to operating bodies. In this regard, machine learning (ML)-aided solutions for self-management and decision-making solutions are emerging research topics.
7.7. The IoUT for Humanitarian Applications
Current humanitarian applications in the underwater environment are based on limited UWSN architectures. One crucial challenge in this domain is developing an IoUT system which can intelligently and autonomously collect underwater data for smart predictions about tsunamis or earthquakes. In this regard, the DARPA’s Strategic Technology Office has started an Ocean of Things funding program to develop analytical solutions for large-scale and high-resolution underwater sensing [
100]. These data analysis methods can process and evaluate data as required. This program also includes the design and deployment of underwater floats to sense and record ocean parameters such as pH, pressure, temperature, dissolved oxygen, etc. These floats have communication and energy harvesting features along with data collection capabilities. Moreover, they have the potential to significantly improve performance in terms of sampling rate, mobility control, reduced biofouling, and energy consumption. Apart from these advantages, several issues must be considered for in humanitarian applications of the IoUT, including data aggregation and routing, energy efficiency, smart deployment, stable connectivity, and enhanced coverage. Opportunistic or routing and void-control solutions can be adopted to control and enhance the network performance. To overcome the daunting challenge of connectivity, topology control algorithms [
116] to move underwater nodes from shadow zones to deeper areas can be used. Such depth control solutions can support reliable network connectivity and enhanced coverage. In this way, earthquakes or tsunamis can be detected in a timely manner to prevent catastrophic incidents. Moreover, marine experts should develop novel mechanisms for packet reduction in the IoUT, as this could substantially reduce energy consumption, thereby prolonging the lifespan of IoUT networks for underwater humanitarian applications.
7.8. IoUT Security and Privacy Issues
In general, acoustic communication and long propagation delays make UWSNs weak. Moreover, it seems difficult to use current access control, privacy, and security methods for UWSNs. Thus, it is important to design novel security mechanisms [
58,
117]. Existing security mechanisms cannot guarantee secure network services due to a lack of standardizations, security features, and privacy strategies [
34]. A secure encryption strategy can pave the way for an IoUT with low computational overheads. The IoUT faces several critical concerns, such as flooding, spoofing, blackholes, sinkholes, Sybil, wormholes, and jamming [
23]. When faced with such attacks, network data can be stolen, but complete network failure can also occur. In addition, sensitive data can be stolen during communication between nodes through tapping or eavesdropping attacks. In this regard, mutual authentication methods are used to preserve data authenticity and tackle eavesdropping. Furthermore, blockchain-aided solutions [
118,
119] and encryption techniques can also be implemented to ensure data availability, integrity, authenticity, and confidentiality. In our opinion, the development of robust and strong security mechanisms for the IoUT is a promising research direction. These security mechanisms can integrate high-level security architectures and confidentiality, integrity, availability, and quality of service (QoS) features to protect IoUT nodes from possible threats like denial-of-service (DoS), routing, spoofing, and jamming.
Similarly, data privacy is another primary concern for the IoUT, as it is based on sensitive data in naval and military operations, e.g., identity and position sharing and submarine tracking. In such circumstances, it is difficult to implement the privacy techniques used with the terrestrial IoT, such as k-anonymity, 1-diversity, t-closeness, and differential privacy. Therefore, preserving privacy in the IoUT is critical [
120].
7.9. Reliable Multihop Transmission Control Protocol
In the case of mission-critical IoUT, as much data as possible should be sent in a multihop manner, as the interference, noise, and fading in the underwater environment will severely degrade communication reliability. Consequently, it is hard to satisfy the desiderata of the required IoUT mission. Thus, it is crucially important to take data rate and security into account in order to conceive high reliability in multihop transmission control protocols to support large-scale heterogeneous networks. Artificial intelligence [
121], machine learning, and reinforcement learning and related approaches [
122,
123,
124] are good solutions to tackle large-scale control decision optimization issues in complex environments.
7.10. Lack of Standardization
In order to achieve interoperability, the IoUT needs to be subject to stringent regulations and standardization. Currently, there is a lack of standardization in the IoUT, and the heterogeneity of IoUT objects, technologies, and applications is a major issue. This issue needs to be overcome to meet the interoperability requirements of IoUT network entities. Academics and regulatory bodies should introduce proper standardizations for IoUT objects, applications, and services which also ensure privacy and the security of sensitive data.
Acoustic Protocol for the IoUT
For decades, the global standards defined for cellular networks and WiFi have facilitated data exchange via radio waves. However, these standards cannot be implemented in underwater mediums, and there is a clear lack of research on standardizations for the underwater environment. Scientists from the NATO Centre for Maritime Research and Experimentation (CMRE) introduced the first standard for underwater acoustic communication, named JANUS [
125]. It was the intention that this project should serve not only NATO or the military but also that it could be adopted internationally. It is unique, as it can benefit governments, industry, and academia. It is a common standard based on acoustic communication to connect underwater systems. JANUS prescribes specifications such as message format and signal encoding, allowing third parties to use it to construct transmitters or receivers for underwater communication. This protocol also provides easy adoptability by legacy devices, freedom to use sophisticated decoders and receivers, and enhanced performance. Furthermore, it indicates which reduncies must be added in order to reduce communication errors. In the future, researchers should put more effort into improving the JANUS standard in order to overcome any elements which may be missing.
7.11. Link Misalignment in Optical IoUT
UOWC supports high data rate links in underwater environments for optical IoUT (O-IoUT). O-IoUT technologies have been used in several underwater applications such as underwater navigation, diver-to-diver communication, environmental monitoring, search and rescue, underwater habitat tracking, maritime archeology, and ocean exploration. O-IoUT uses LDs or LEDs to achieve efficient underwater communication. Usually, blue or green LDs are used due to the low absorption of this light; such an approach can be used for communication over considerable distances. An optimal source has a narrow divergence angle and follows the LOS path, as shown in
Figure 14. However, high-speed optical communication is hampered by misalignment between the transmitter and receiver, absorption, high scattering, and channel impairments. This approach supports high-speed communication only in LOS scenarios achieved by precise synchronization and smart alignment. It is worth mentioning that even a small misalignment caused by wind disturbance or the turbid nature of water can reduce the data rate, lower the SNR, and degrade the BER performance of the system [
126]. Different techniques such as spatial diversity and pre-amplification can be used to overcome these SNR and BER challenges. It is essential to overcome the issue of misalignment between transceivers to ensure efficient underwater communication.
7.12. Localization
In the underwater environment, the localization of nodes critical, as it is the foundation of ocean monitoring and target tracking. When deploying an underwater network, resilience to mobility must be considered. In ROVs and AUVs, mobility is controlled and supervised. However, uncontrolled mobility due to dispersion and water currents severely influences floating underwater sensor nodes [
127,
128]. The design of an UWSN and predictions of its performance require the precise modeling of the mobility of the component nodes, as such mobility in underwater environments is not completely random. Currently, most node localization algorithms consider fixed node location and calm seas. However, underwater nodes drift due to the motion of currents. Customized mobility models such as tidal mobidlity and meandering l can be used to model node mobility. The meandering model is suitable for deep waters, while the tidal model is well suited for offshore locations. However, more sophisticated models based on temporal and spatial correlation of mobility patterns are yet to be explored. Furthermore, geographic-aided routing protocols are better suited under these circumstances, as they have been shown to be more efficient and scalable for UWSNs, serving to reliably detect the current location of nodes. Similarly, node dynamic prediction algorithms can also be used to overcome localization issues.
7.13. Relay Placement in the IoUT
Relay nodes are important for transmitting data from a source to a sink and enhancing network coverage. In the literature, relay nodes have been utilized to achieve long-distance MI-aided underwater communication, as MI is a promising solution for IoUT communication. In [
129], the authors proposed a strategy using relays for MI-aided IoUT networks to monitor the seafloor. In contrast to MI-based waveguides, the active relaying system needs additional power to process and transmit the received signal. Thus, determining the optimal placement of an appopriate relaying system is a challenging task for both terrestrial and underwater systems.
7.14. Unreliable Channel Conditions [41]
Unlike the terrestrial IoT, IoUT nodes communicate through MI, RF, optical, and acoustic channels [
130,
131,
132]. This results in high levels of error data, significant power needs, and long propagation delays. Additionally, the nature of each approach to communication varies. For instance, the bandwidths of acoustic channels are small compared to those of RFs. Furthermore, due to the open features of IoUT networks, malicious nodes can easily disrupt or hack communications or steal sensitive data. In IoUT networks, channel noise, e.g., ambient and environmental noise, can severely affect the performance of IoUT communication. Ambient noise refers to background noise generated from various sources such as sea animals, underwater objects, or wind, while environmental noise refers to noise generated by human beings via naval, fishing, or shipping activities.

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}