In order to suppress the transient response of the considered second order IIR notch filter it was assumed that the value of the pole radius
r is temporarily varied in time. The proposed method gives the possibility to maintain the frequency specification and, at the same time, to improve the time-domain behaviour of the filter. The main assumption of the proposed idea is to change the pole radius from some set value to a value that is very close to unity. The proposed method allows us to obtain the notch filter with both a suppressed transient response and a narrow bandwidth. The transfer function of the second time-varying IIR notch filter can be expressed in the discrete time domain by the following difference equation:
where
and
are the filter output and the input signal, respectively. The coefficient
is equal to
,
, and
. In order to control the time variation of the pole radius
the 3rd order Bézier curve is used. We have used the Bézier curve because this kind of function can be easily and freely shaped by means of predefined control points. Thanks to the Bézier curve we are able to generate the function that changes the pole radius in a more flexible manner if compared to the exponential function. The proposed parametric curve can be expressed in the following form:
where the Cartesian coordinates of the Bézier curve control points are given as:
,
,
,
. The control points
and
determines respectively the starting and the ending point of the considered curve. The control points
and
deliver directional information. The distance between these control points specifies how the parametric curve moves towards the point
before turning towards point
. The coordinates of point
includes the starting point of the time-varying formula
and the starting pole radius
. On the other hand, the coordinates of
determine the length of the variability time horizon
and the final value of the pole radius
. In order to find the coordinates of the control points
and
the simulated annealing algorithm is used. The main aim of the annealing algorithm is to find
and
whose coordinates minimize the mean square error defined as:
where
K is the duration of the input signal,
is the output of the signal, and
is the clean original signal. Equation (
7) can be reformulated to the following form:
To find the values of the function
at query points for each sample of the filter transient response the interpolation procedure has been used. If the value of
is equal to unity, the variation of the filter pole radius starts at the beginning of the filtering process. The coordinate
should be interpreted as the time horizon of the pole radius variability. In
Figure 1 the Béizer parametric curve that illustrates the variability of the pole radius of the considered notch filter is presented. In this figure all the control points are also indicated.
3.1. Starting Pole Radius
In this subsection, a method for selecting the value of
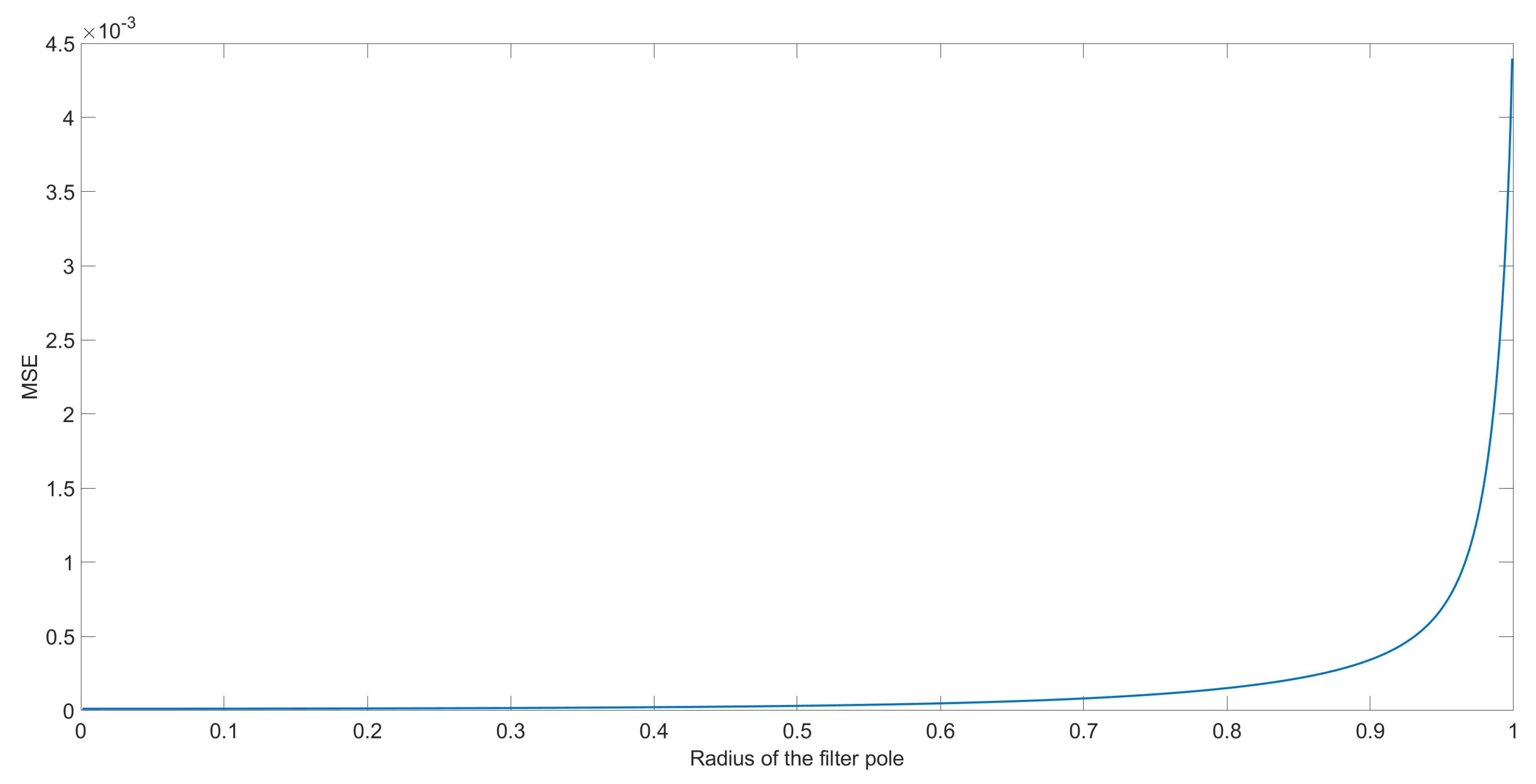
is proposed. In order to select the starting value of the filter pole radius the mean square error for the time-invariant IIR notch filter with various pole radii has been calculated using the following formula:
where
K is the duration of the input signal and
is the output of the filter. The useful signal
used in the procedure for determining the value of the starting pole radius is equal to zero. Therefore, this signal has been omitted in Equation (
10). In the considered procedure the 50 Hz sine wave signal is used as an input signal. The values of
have been determined based on filtering the notch frequency sinusoidal signal using filters with pole radii from 0.01 to 0.999. The relationship between
and the value of the pole radius is presented in
Figure 2.
As one can notice,
grows rapidly for
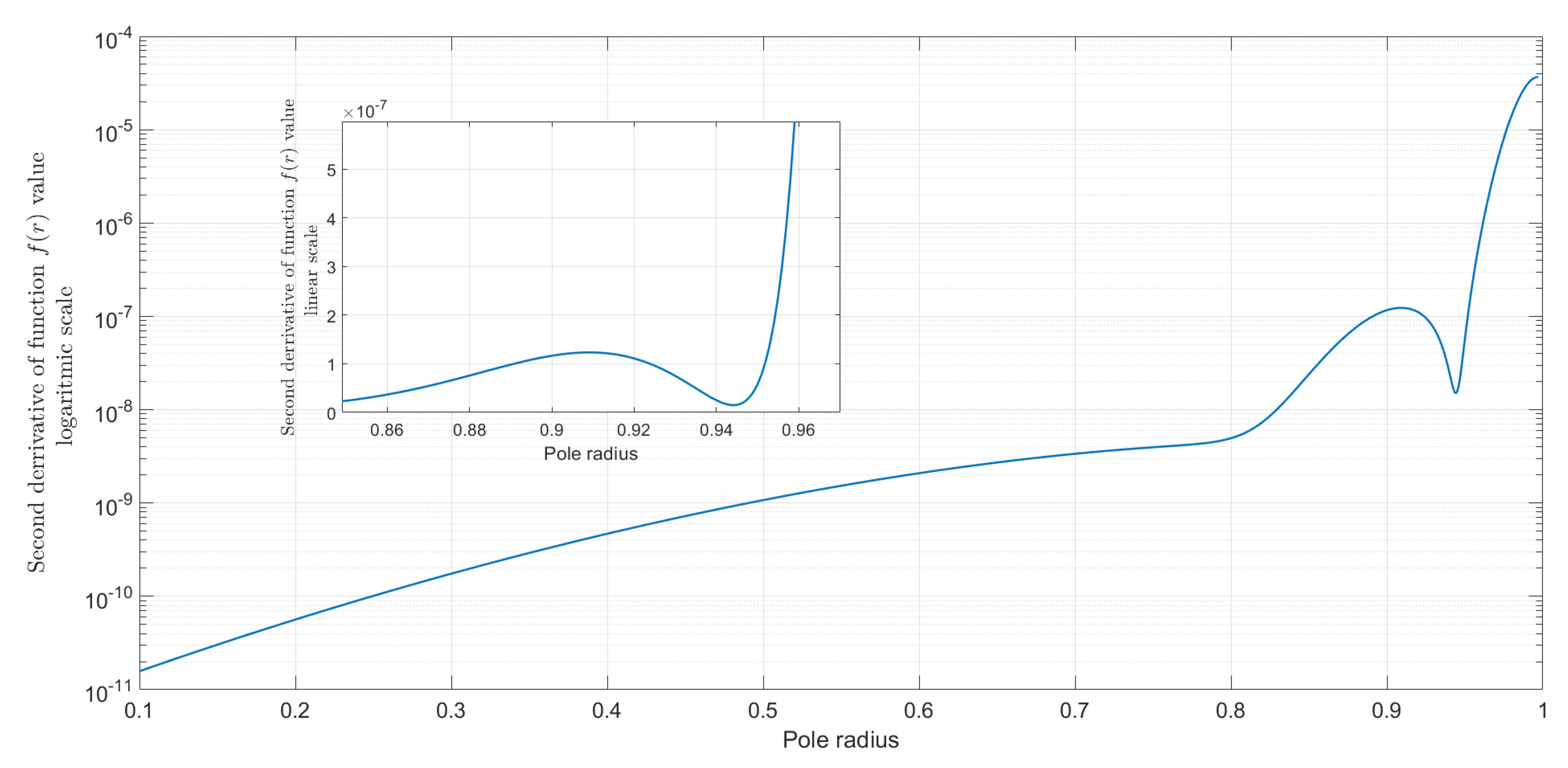
. In order to find a strategic value of the pole radius the second derivative of
has been used. For this purpose a function that approximates the obtained
has been derived. The proposed function is a sum of three exponential base functions, and has the following form:
where
,
,
,
,
,
,
,
, and
. The second derivative of
given by Equation (
11) can be written as:
In
Figure 3 the second derivative of
on the interval between
and
is depicted. The value of
has been chosen as the pole radius for which the function given by Equation (
12) approaches the local minimum. All important parameters of the proposed notch filter with time-varying pole radius are presented in
Table 2.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}