Serpens: A Highly Compliant Low-Cost ROS-Based Snake Robot with Series Elastic Actuators, Stereoscopic Vision and a Screw-Less Assembly Mechanism


Abstract
:1. Introduction
2. Related Research Work
3. Mechanical Overview
3.1. Design Principles
- Principle of minimalism. To make the robot inexpensive, easily customisable, and fast to fabricate, each module is equipped with the simplest mechanical structure, the minimum number of actuators (only a single SEA per module with one degree of freedom (DOF) and the simplest set of sensors. During the design process, the main focus is to keep the amount of parts as low as possible, and at the same time minimise the number of assembly operations.
- Principle of symmetry. To facilitate the interaction with the environment, a symmetric design is adopted for each module with a flat profile for the interaction with the terrain. The symmetric design is also selected to store and release energy in a balanced manner.
- Screw-less assembly mechanism. To ease the connection and reconfiguration of the robot modules, a screw-less assembly mechanism is designed in a very reliable and robust manner.
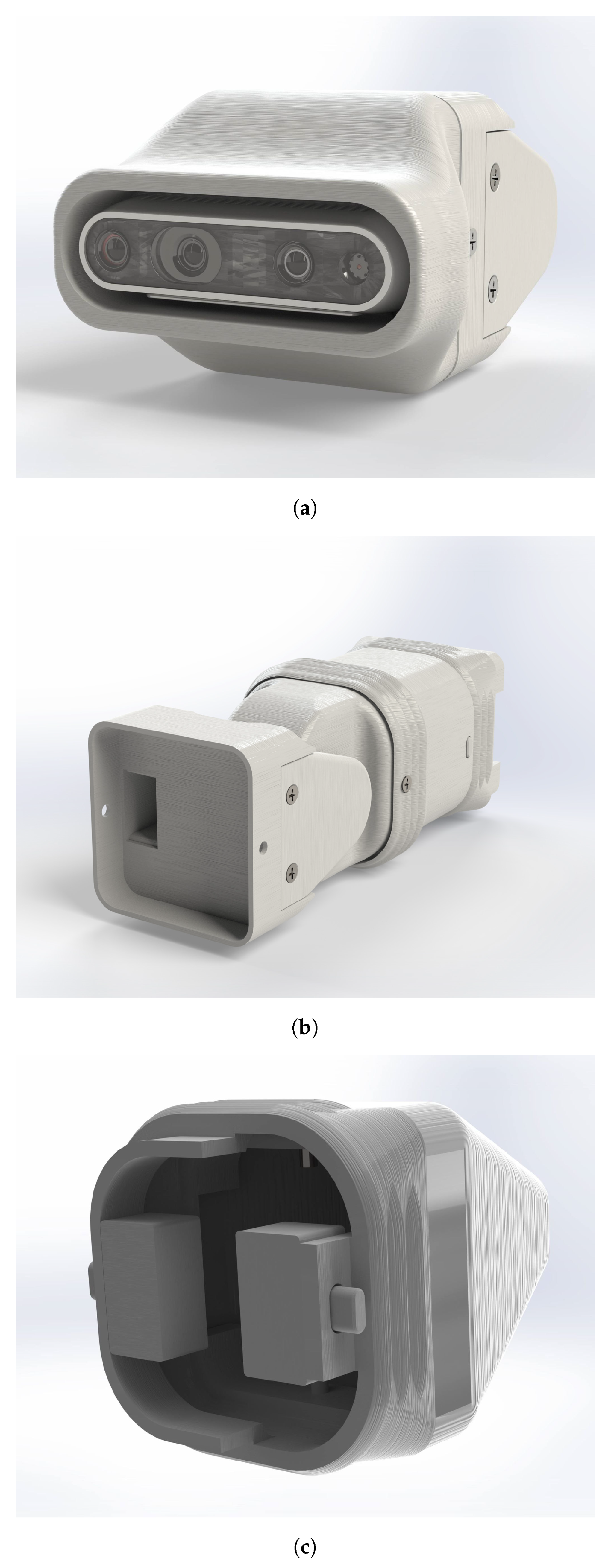
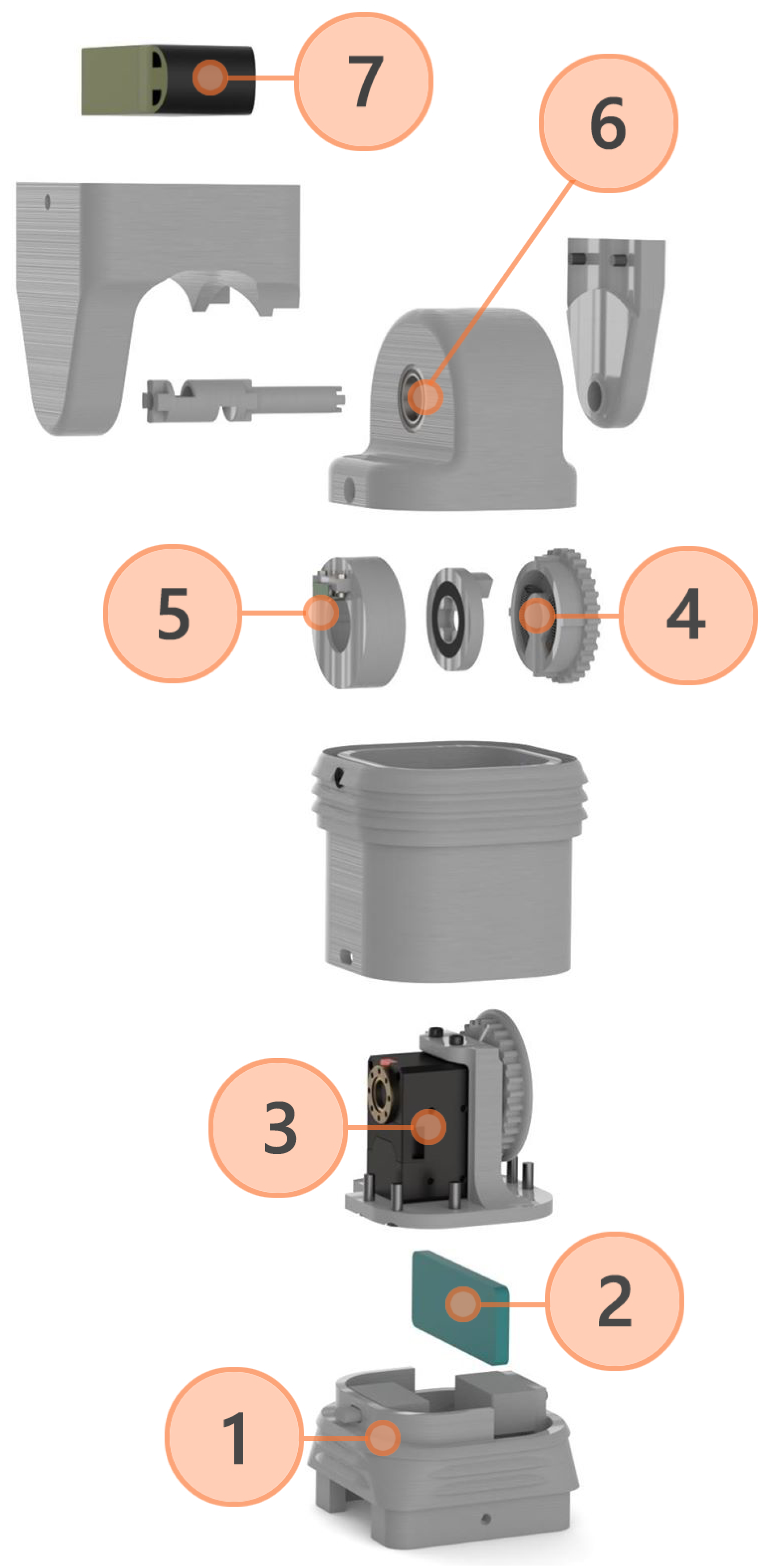
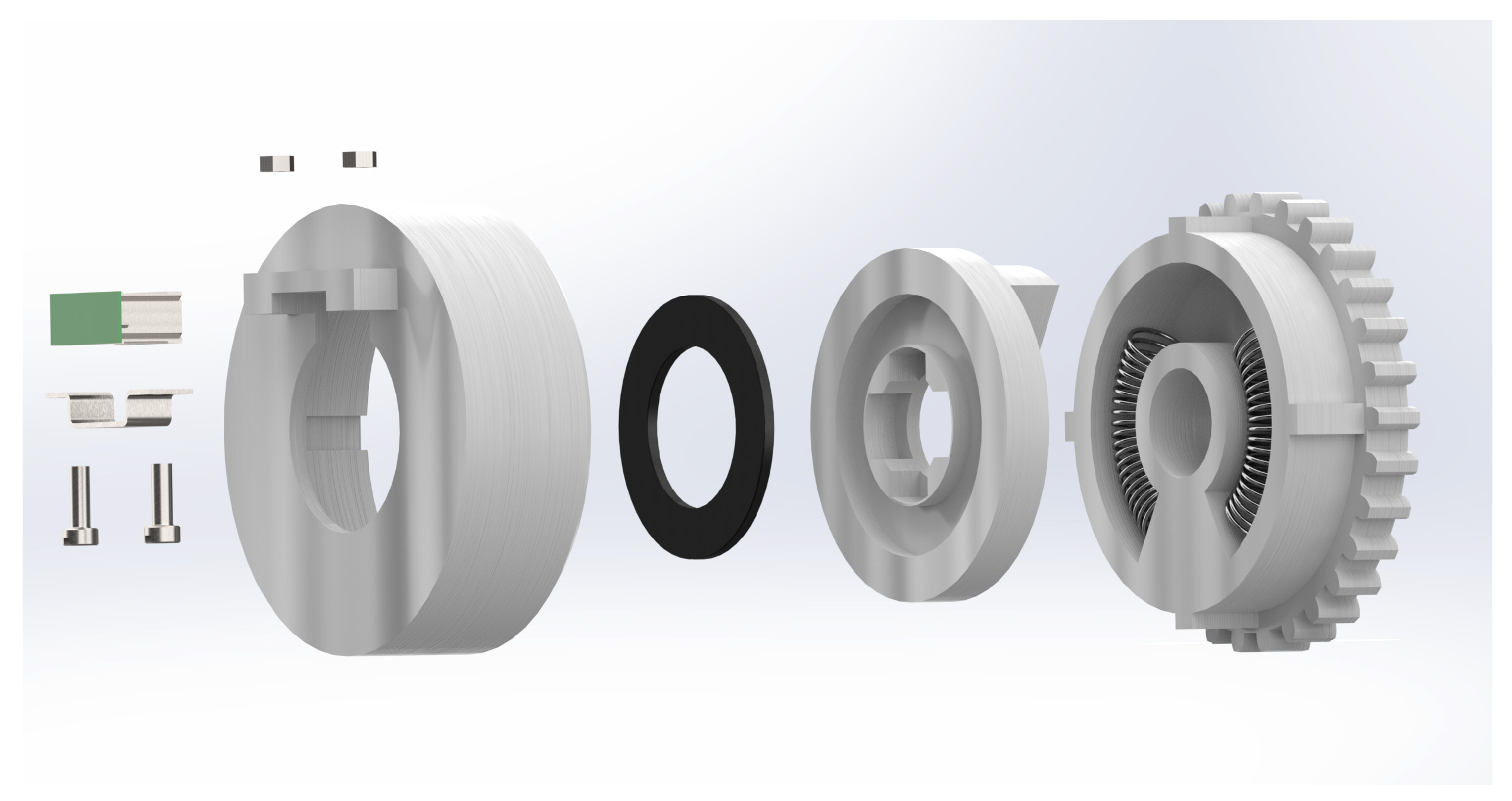
3.2. Mechanical Design
3.3. Estimated Production Cost
- 3D-printing cost;
- cost of COTS mechanical parts (e.g., springs, nuts, bolts, bearings); and
- electrical components (e.g., micro-controller, sensors, and actuator).
3.4. Screw-Less Assembly Mechanism
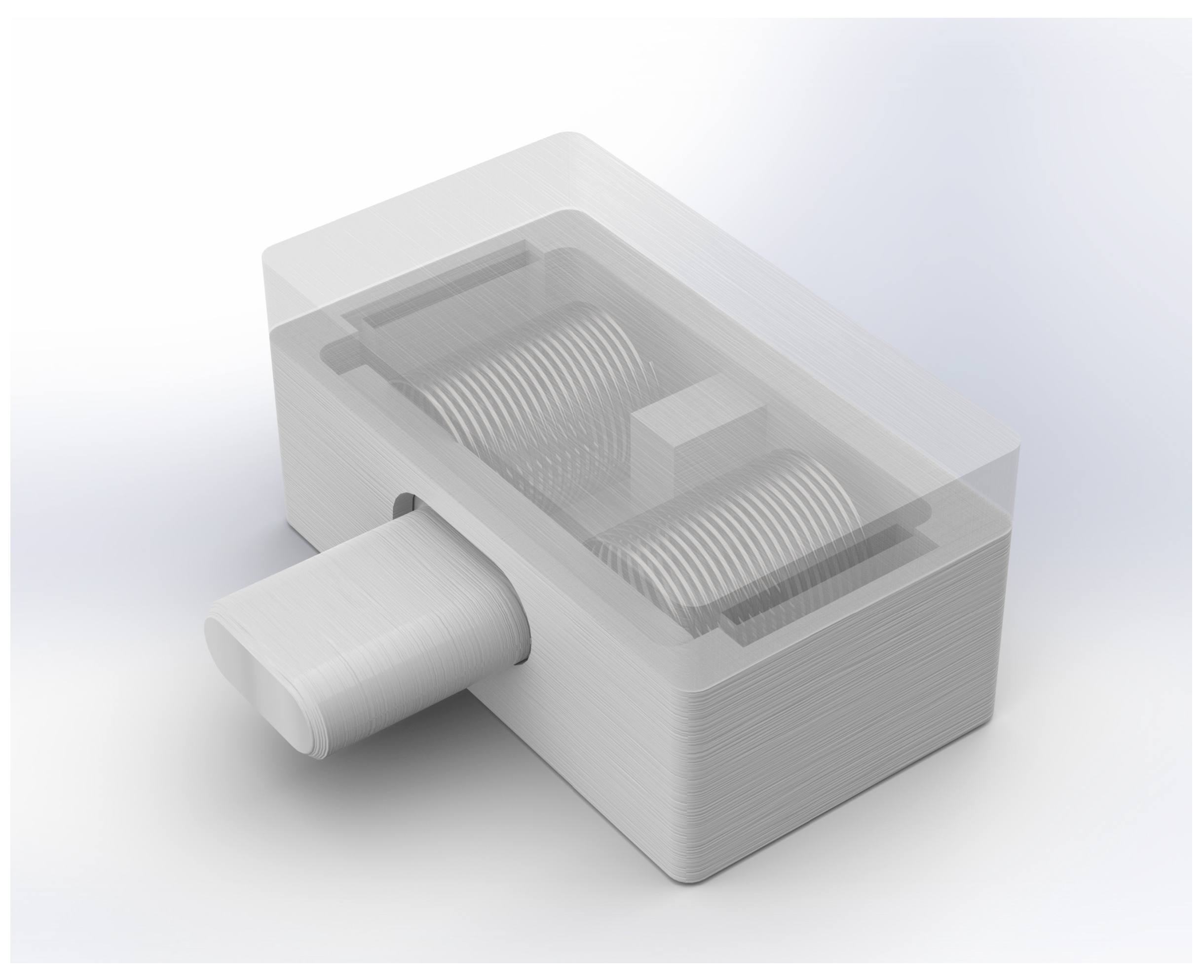
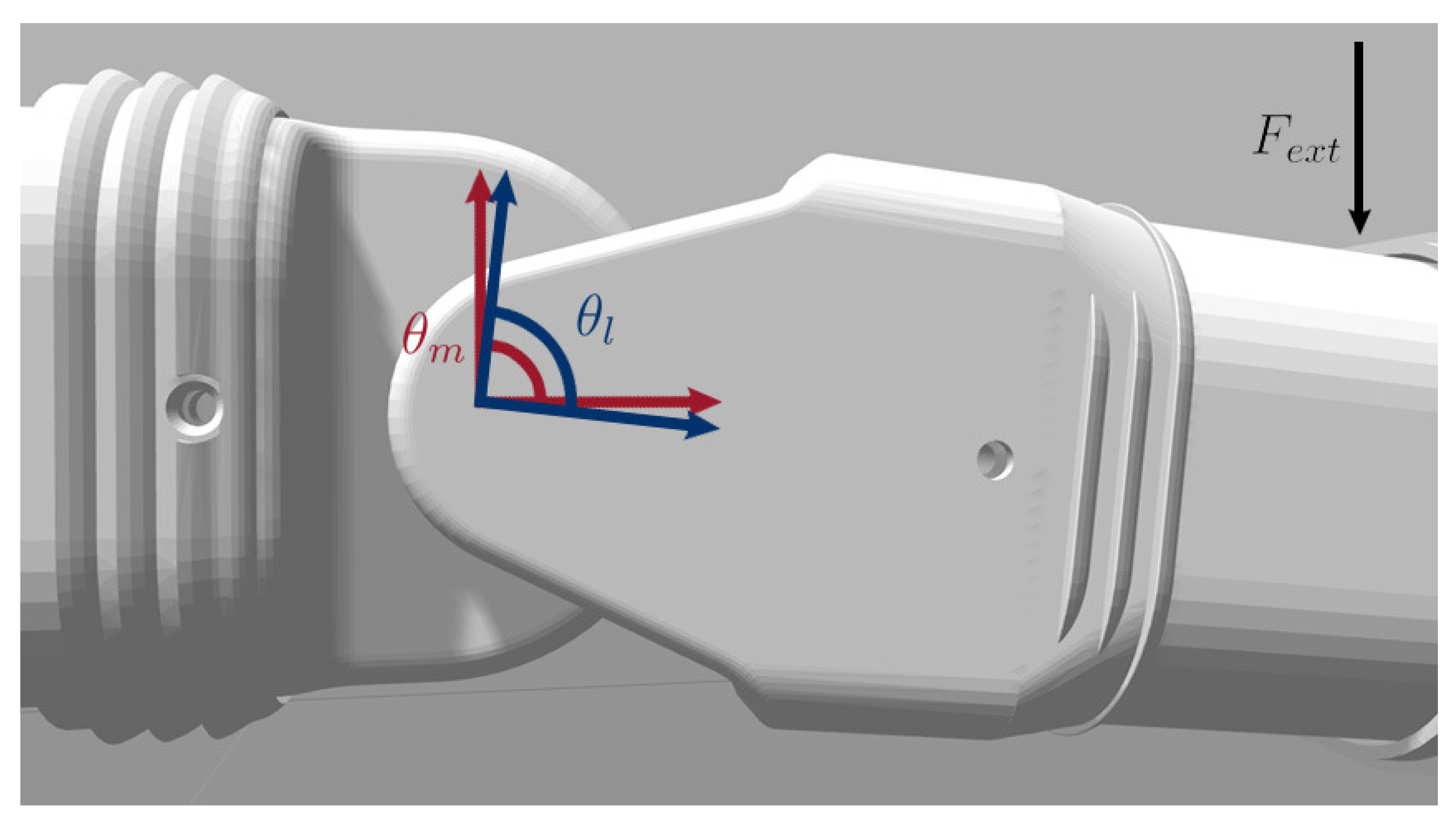
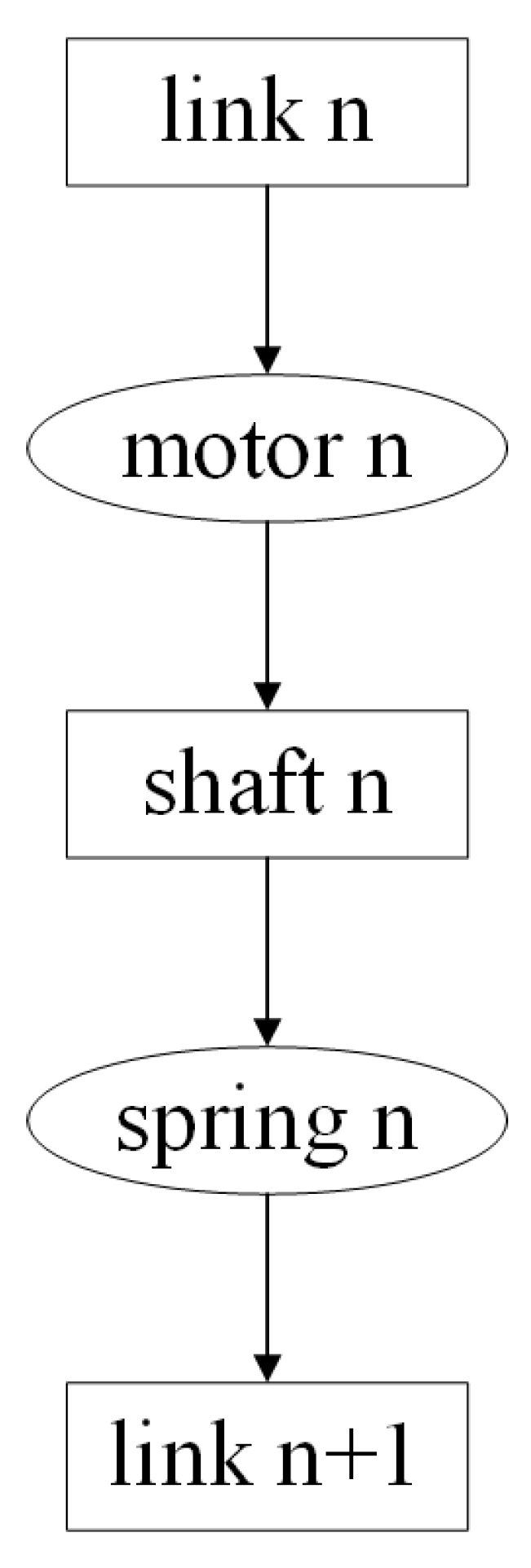
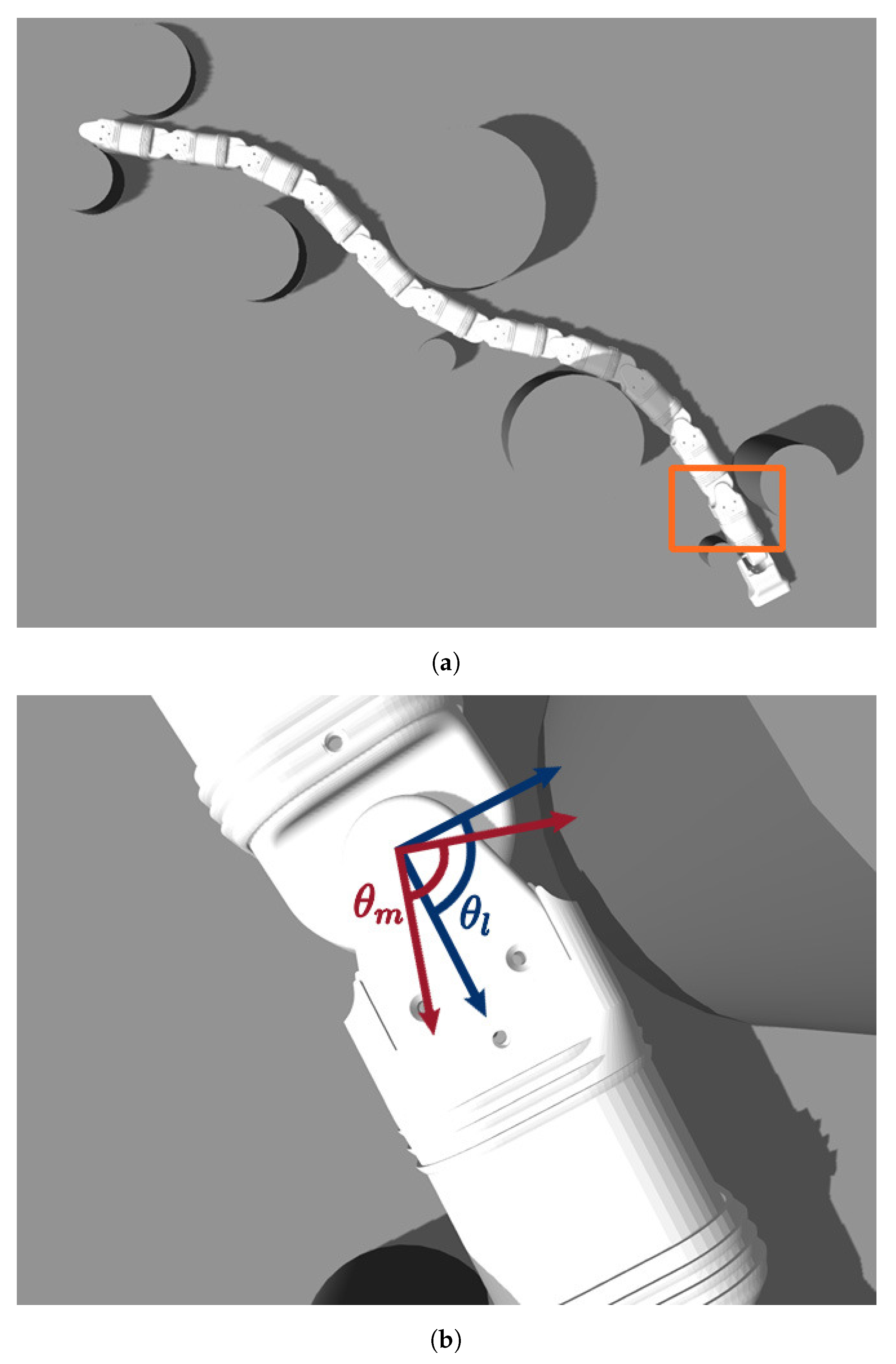
3.5. Series Elastic Actuator (SEA)
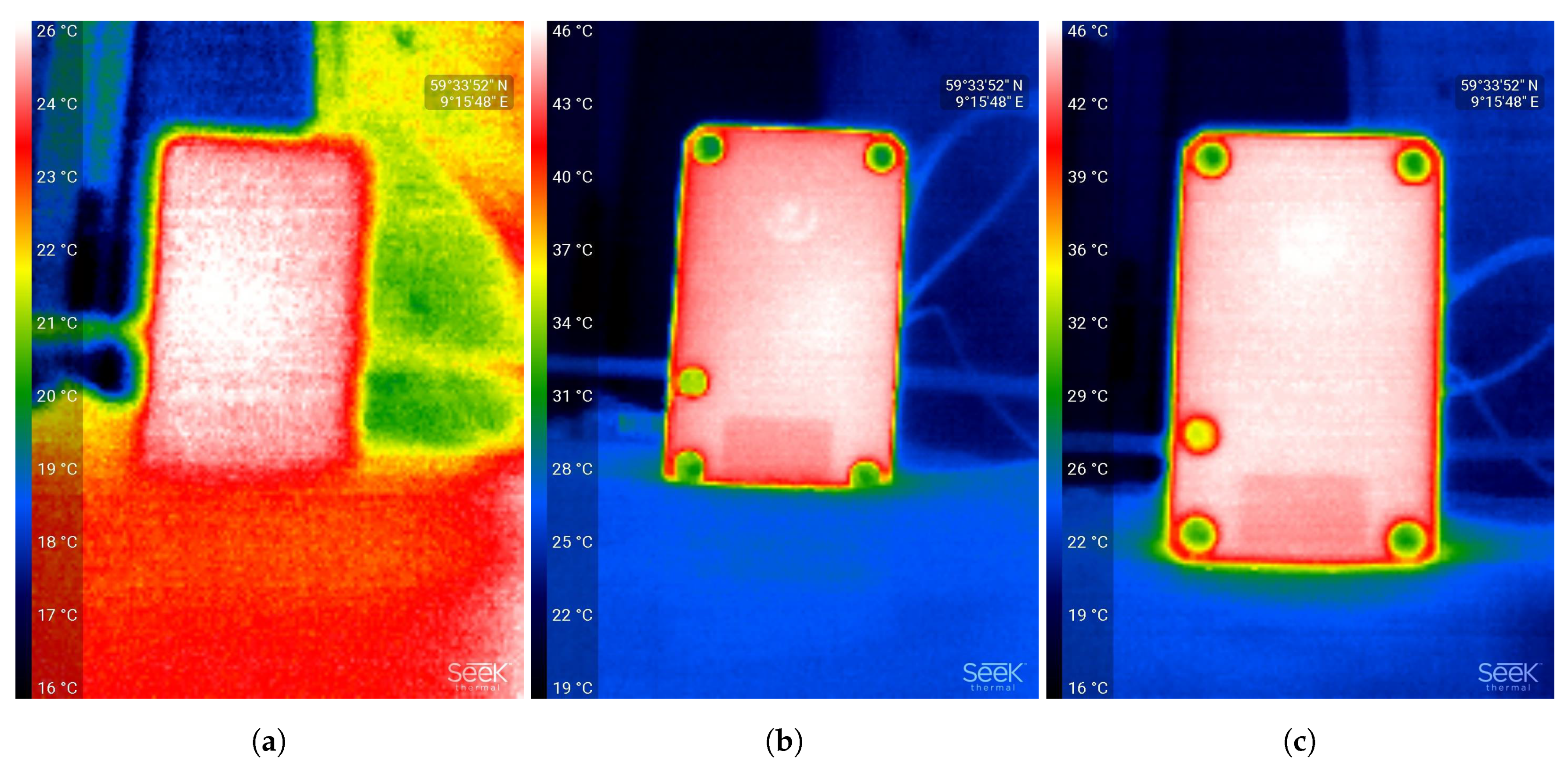
3.6. Heat Dissipation
4. Software/Hardware Overview
4.1. Open-Source Software
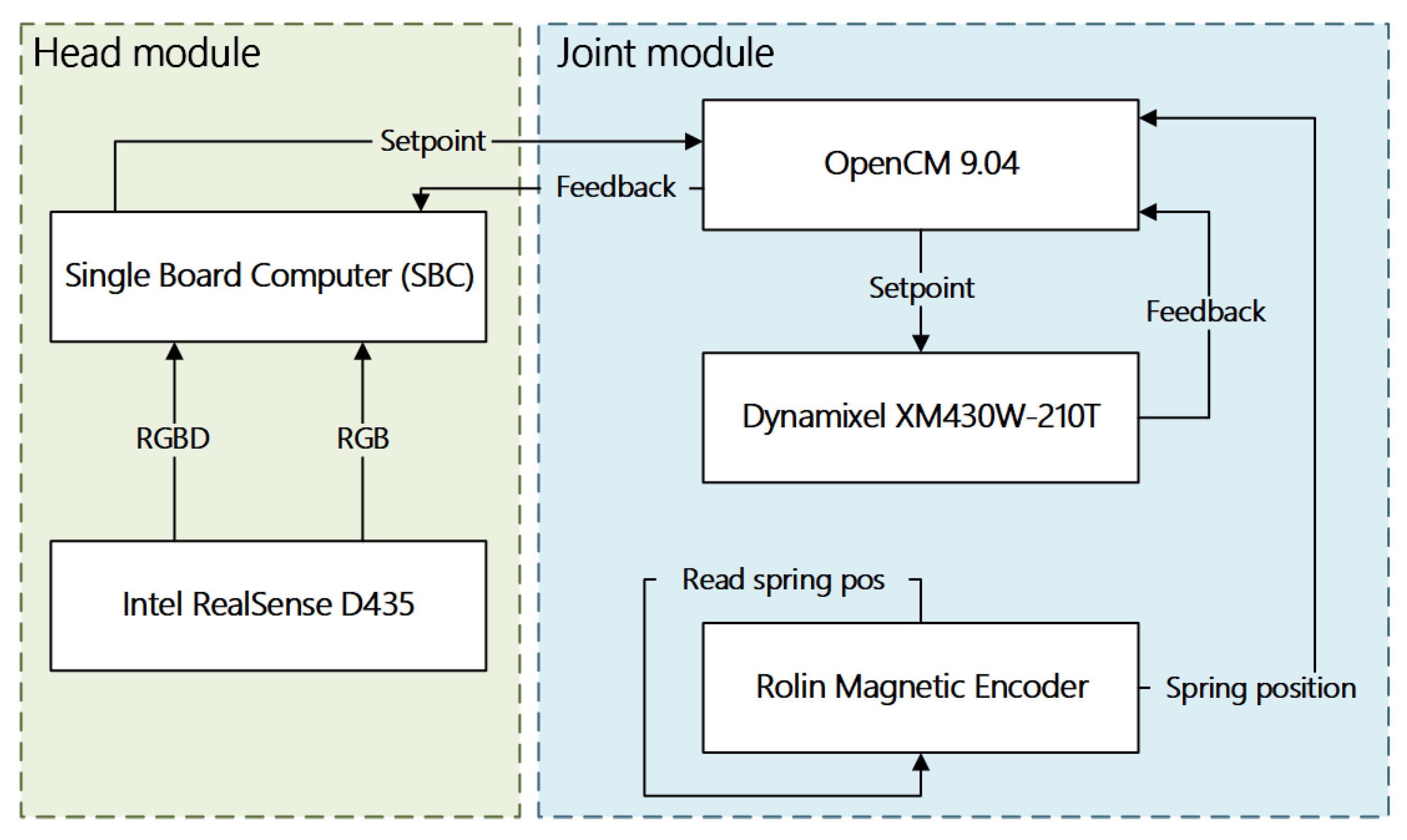
4.2. Hardware Overview
4.3. Encoders
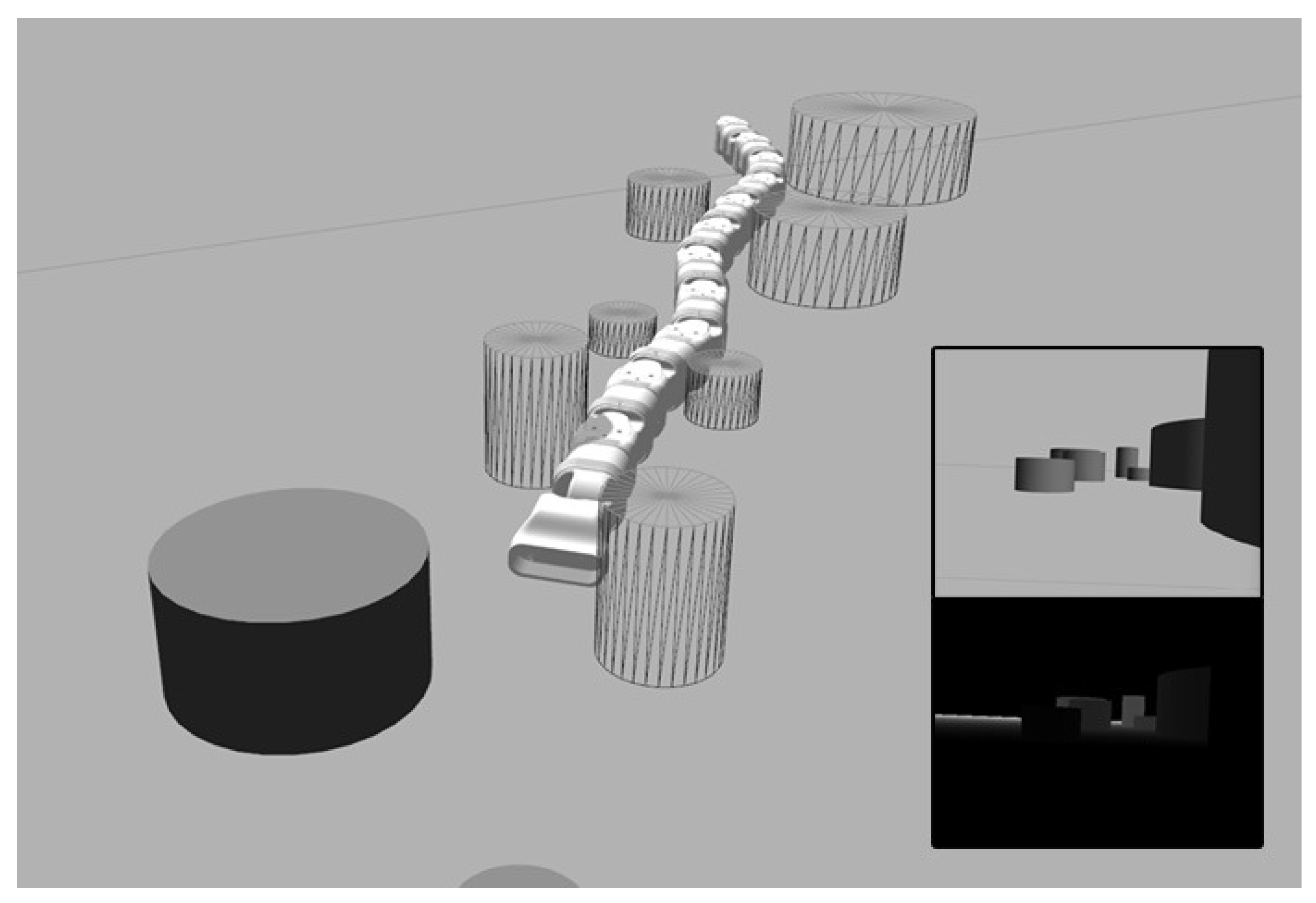
4.4. Single-Board Computer and Stereoscopic Camera
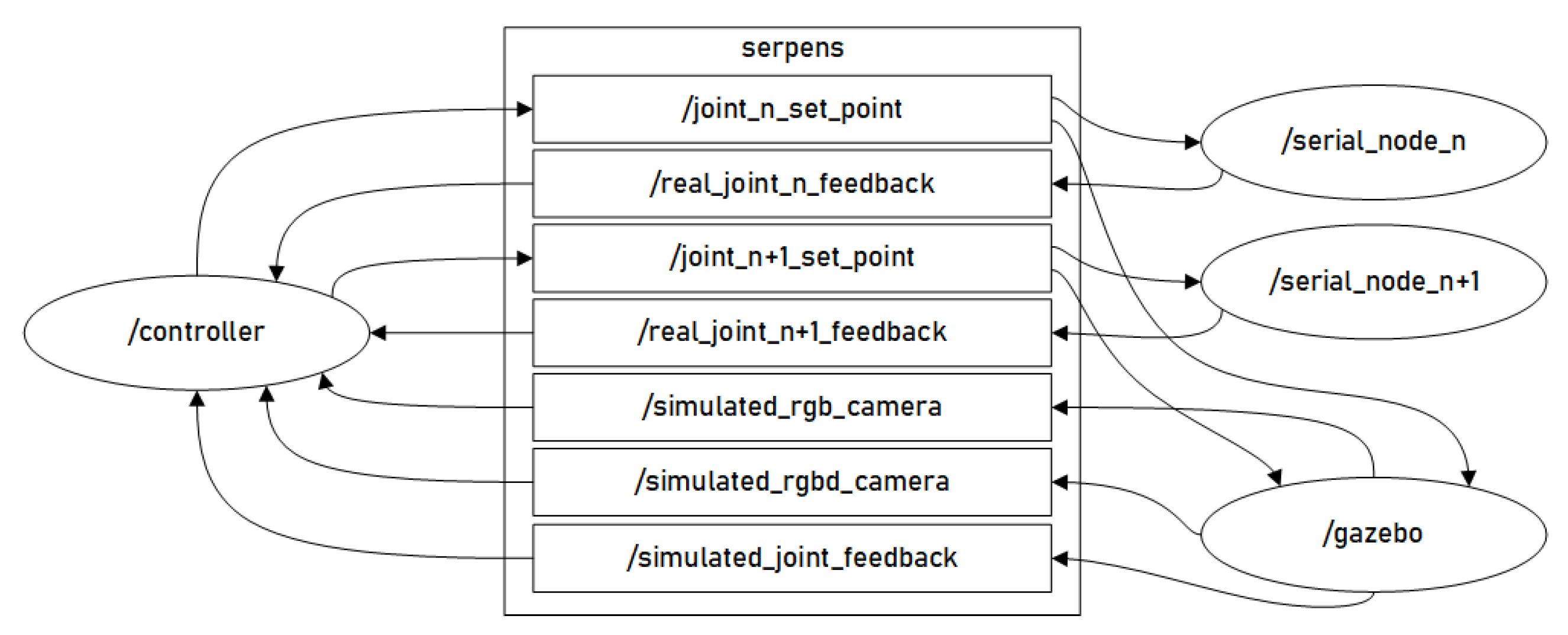
4.5. ROS-Based Low-Level Architecture
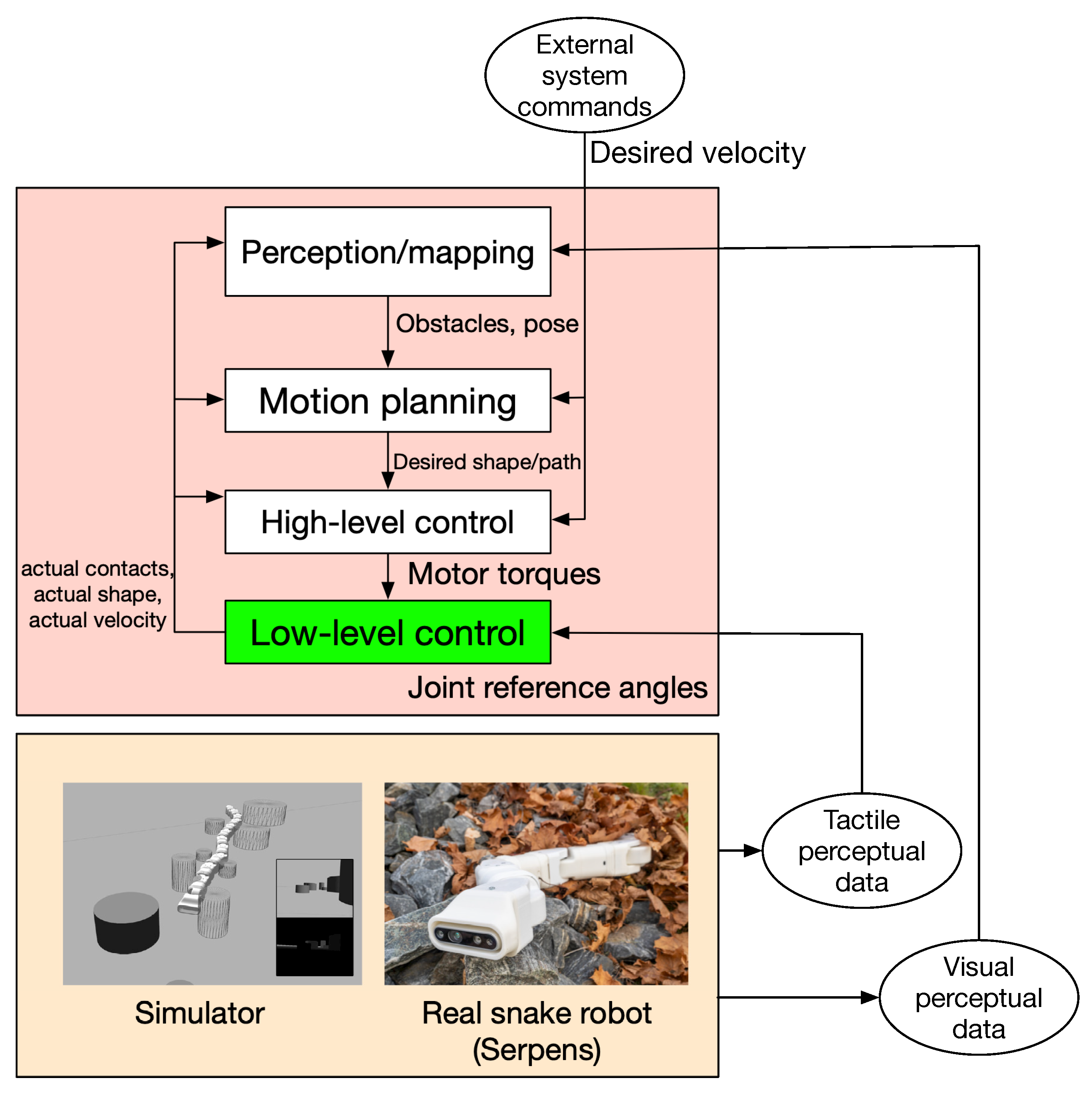
4.6. Guidelines for Designing the Control Framework Architecture to Achieve POAL
- Perception/Mapping: This level is responsible for achieving the functions of sensing, mapping and localisation.
- Motion planning: This level is responsible for decision-making, path-planning and mission planning activities.
- High-level control: This level combines force and torque information with positional data to satisfy simultaneous position and force trajectory constraints.
- Low-level control: This level is responsible for the low-level control of individual joints. This is the level presented in this work.
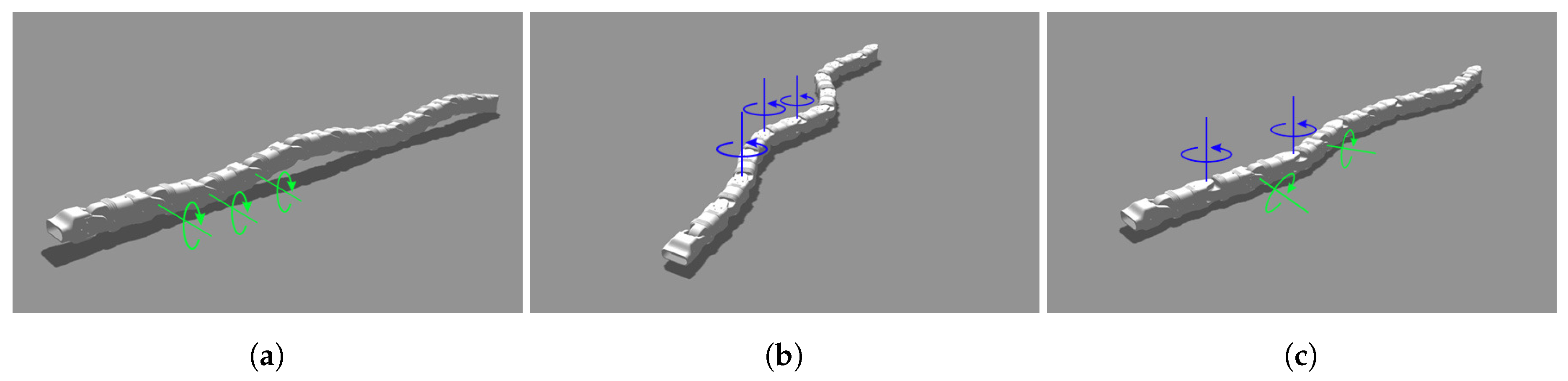
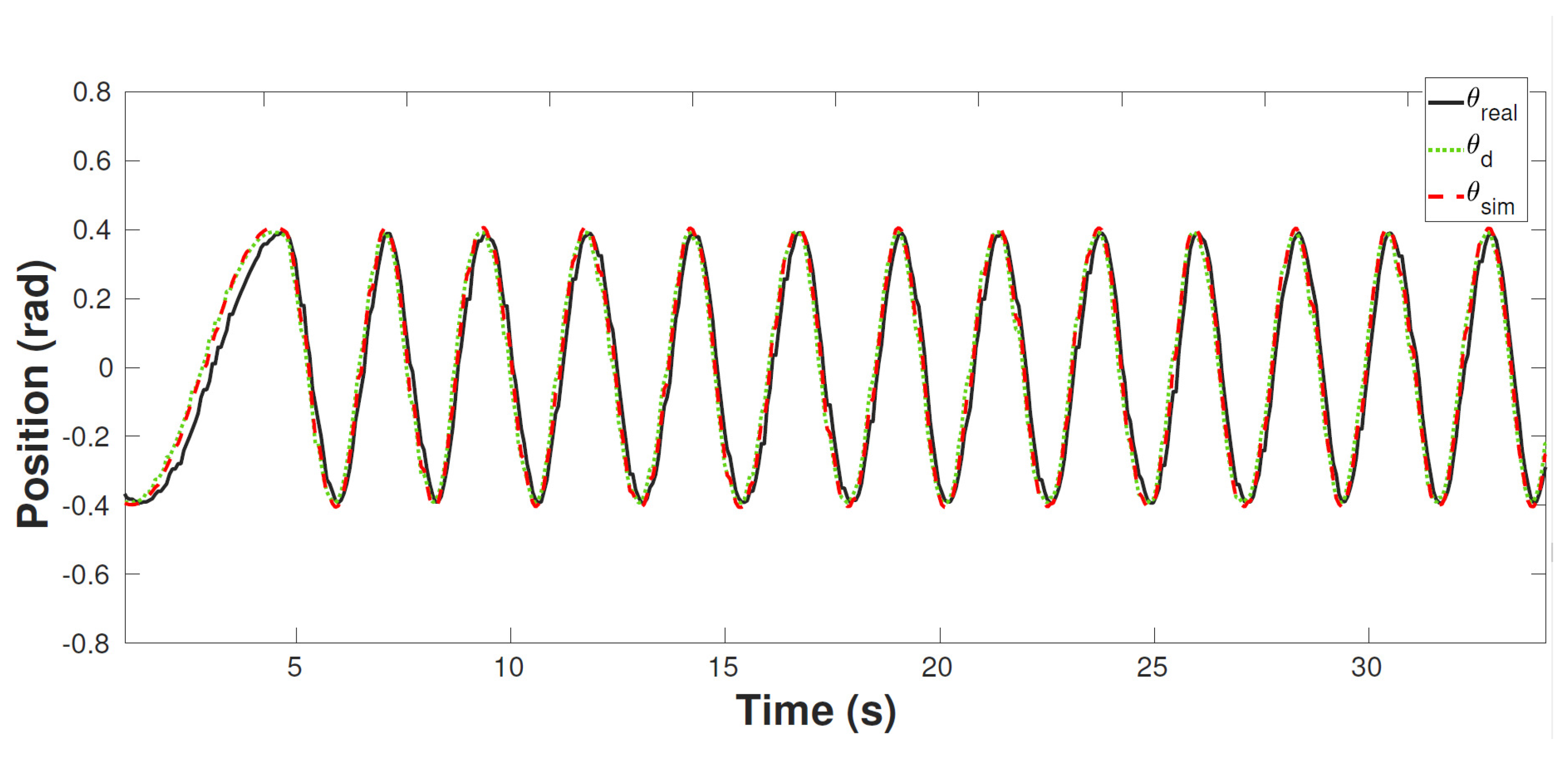
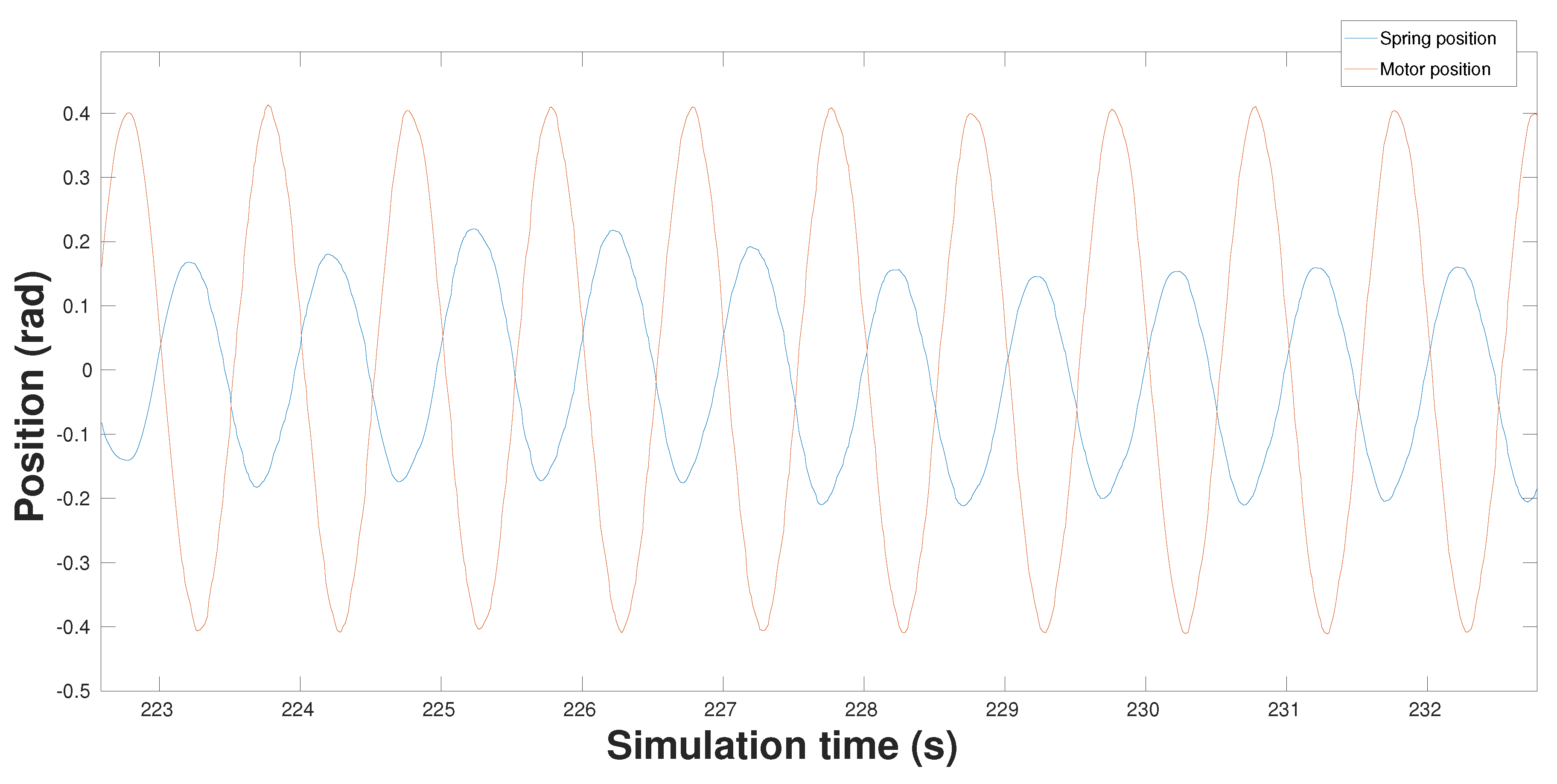
5. Simulations and Experimental Results
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| POAL | perception-driven obstacle-aided locomotion |
| SEA | series elastic actuator |
| ROS | Robot Operating System |
| FDM | Fused Deposition Modelling |
References
- Marvi, H.; Gong, C.; Gravish, N.; Astley, H.; Travers, M.; Hatton, R.L.; Mendelson, J.R.; Choset, H.; Hu, D.L.; Goldman, D.I. Sidewinding with minimal slip: Snake and robot ascent of sandy slopes. Science 2014, 346, 224–229. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sanfilippo, F.; Stavdahl, Ø.; Liljebäck, P. SnakeSIM: A ROS-based rapid-prototyping framework for perception-driven obstacle-aided locomotion of snake robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 1226–1231. [Google Scholar]
- Sanfilippo, F.; Stavdahl, Ø.; Liljebäck, P. SnakeSIM: A ROS-based control and simulation framework for perception-driven obstacle-aided locomotion of snake robots. Artif. Life Robot. 2018, 23, 449–458. [Google Scholar] [CrossRef]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.A.; Stavdahl, Ø.; Liljebäck, P. A review on perception-driven obstacle-aided locomotion for snake robots. In Proceedings of the 14th International Conference on Control, Automation, Robotics and Vision (ICARCV), Phuket, Thailand, 13–15 November 2016; pp. 1–7. [Google Scholar]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.A.; Stavdahl, Ø.; Liljebäck, P. Perception-driven obstacle-aided locomotion for snake robots: The state of the art, challenges and possibilities. Appl. Sci. 2017, 7, 336. [Google Scholar] [CrossRef]
- Sanfilippo, F.; Stavdahl, Ø.; Marafioti, G.; Transeth, A.A.; Liljebäck, P. Virtual functional segmentation of snake robots for perception-driven obstacle-aided locomotion. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1845–1851. [Google Scholar]
- Eitel, E. The Rise of Soft Robots and the Actuators That Drive Them. Available online: https://www.machinedesign.com/robotics/rise-soft-robots-and-actuators-drive-them (accessed on 15 November 2018).
- Haddadin, S.; Mansfeld, N.; Albu-Schäffer, A. Rigid vs. elastic actuation: Requirements & performance. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Algarve, Portugal, 7–12 October 2012; pp. 5097–5104. [Google Scholar]
- Rollinson, D.; Bilgen, Y.; Brown, B.; Enner, F.; Ford, S.; Layton, C.; Rembisz, J.; Schwerin, M.; Willig, A.; Velagapudi, P.; et al. Design and architecture of a series elastic snake robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, USA, 14–18 September 2014; pp. 4630–4636. [Google Scholar]
- Rollinson, D.; Ford, S.; Brown, B.; Choset, H. Design and modeling of a series elastic element for snake robots. In Proceedings of the ASME 2013 Dynamic Systems and Control Conference. American Society of Mechanical Engineers, Palo Alto, CA, USA, 21–23 October 2013; p. V001T08A002. [Google Scholar]
- Lipson, H.; Kurman, M. Fabricated: The New World of 3D Printing; John Wiley & Sons: New York, NY, USA, 2013. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Liljeback, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. Snake robot locomotion in environments with obstacles. IEEE/ASME Trans. Mech. 2012, 17, 1158–1169. [Google Scholar] [CrossRef]
- Hirose, S. Biologically Inspired Robots: Snake-Like Locomotors and Manipulators; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Bayraktaroglu, Z.Y. Snake-like locomotion: Experimentations with a biologically inspired wheel-less snake robot. Mech. Mach. Theory 2009, 44, 591–602. [Google Scholar] [CrossRef]
- Takaoka, S.; Yamada, H.; Hirose, S. Snake-like active wheel robot ACM-R4. 1 with joint torque sensor and limiter. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, CA, USA, 25–30 September 2011; pp. 1081–1086. [Google Scholar]
- Liljebäck, P.; Stavdahl, Ø.; Pettersen, K.Y.; Gravdahl, J.T. A modular and waterproof snake robot joint mechanism with a novel force/torque sensor. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Algarve, Portugal, 7–12 October 2012; pp. 4898–4905. [Google Scholar]
- Liljebäck, P.; Stavdahl, Ø.; Pettersen, K.Y.; Gravdahl, J.T. Mamba-A waterproof snake robot with tactile sensing. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, USA, 14–18 September 2014; pp. 294–301. [Google Scholar]
- Pratt, G.A.; Williamson, M.M. Series elastic actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Pittsburgh, PA, USA, 5–9 August 1995; Volume 1, pp. 399–406. [Google Scholar]
- Robinson, D.W.; Pratt, J.E.; Paluska, D.J.; Pratt, G.A. Series elastic actuator development for a biomimetic walking robot. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Atlanta, GA, USA, 19–23 September 1999; pp. 561–568. [Google Scholar]
- Rouse, E.J.; Mooney, L.M.; Martinez-Villalpando, E.C.; Herr, H.M. Clutchable series-elastic actuator: Design of a robotic knee prosthesis for minimum energy consumption. In Proceedings of the International Conference on Rehabilitation Robotics (ICORR 2013), Bellevue, WA, USA, 20–24 June 2013. [Google Scholar]
- Paine, N.; Mehling, J.S.; Holley, J.; Radford, N.A.; Johnson, G.; Fok, C.L.; Sentis, L. Actuator control for the NASA-JSC Valkyrie humanoid robot: A decoupled dynamics approach for torque control of series elastic robots. J. Field Robot. 2015, 32, 378–396. [Google Scholar] [CrossRef]
- Nguyen, M.N.; Tran, D.T.; Ahn, K.K. Robust position and vibration control of an electrohydraulic series elastic manipulator against disturbance generated by a variable stiffness actuator. Mechatronics 2018, 52, 22–35. [Google Scholar] [CrossRef]
- Rollinson, D.; Alwala, K.V.; Zevallos, N.; Choset, H. Torque control strategies for snake robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, USA, 14–18 September 2014; pp. 1093–1099. [Google Scholar]
- Intel. Intel RealSense D435. Available online: https://click.intel.com/intelr-realsensetm-depth-camera-d435.html (accessed on 15 November 2018).
- Gonzalez-Gomez, J.; Zhang, H.; Boemo, E. Locomotion principles of 1D topology pitch and pitch-yaw-connecting modular robots. In Bioinspiration and Robotics Walking and Climbing Robots; InTech: Vienna, Austria, 2007. [Google Scholar]
- Robinson, D.W. Design and Analysis of Series Elasticity in Closed-Loop Actuator Force Control. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2000. [Google Scholar]
- DYNAMIXEL. XM430-W210T. Available online: http://support.robotis.com/en/product/actuator/dynamixel_x/xm_series/xm430-w210.htm (accessed on 15 November 2018).
- Tsardoulias, E.; Mitkas, P. Robotic frameworks, architectures and middleware comparison. arXiv, 2017; arXiv:1711.06842. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Kam, H.R.; Lee, S.H.; Park, T.; Kim, C.H. RViz: A toolkit for real domain data visualization. Telecommun. Syst. 2015, 60, 337–345. [Google Scholar] [CrossRef]
- Arduino. Arduino, an Open-Source Electronics Prototyping Platform. Available online: http://arduino.cc/ (accessed on 15 November 2018).
- RoLin. RoLin Rotary Incremental Encoder. Available online: https://www.rls.si/en/products/rotary-magnetic-encoders/rolin-rotary-incremental-magnetic-encoder-system (accessed on 15 November 2018).
- Robot Operating System (ROS). realsense2_camera. Available online: http://wiki.ros.org/realsense2_camera (accessed on 15 November 2018).
- Open Source Robotics Foundation. Tutorial: Using a URDF in Gazebo. Available online: http://gazebosim.org/tutorials/?tut=ros_urdf (accessed on 15 November 2018).
- Robot Operating System (ROS). Rosserial. Available online: http://wiki.ros.org/rosserial (accessed on 15 November 2018).
- Kendoul, F. Towards a unified framework for uas autonomy and technology readiness assessment (atra). In Autonomous Control Systems and Vehicles; Springer: Berlin, Germany, 2013; pp. 55–71. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Weight | ∼500 g |
| Width/height | 75 mm |
| Length between joint axes | 200 mm |
| Degrees of freedom | 1 |
| Max joint travel | |
| Max continuous joint torque | 3.0 Nm (at 12 V) |
| Max joint speed with no load | 77 RPM (at 12 V) |
| Operating Temperature (actuators) | −5 °C∼80 °C |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanfilippo, F.; Helgerud, E.; Stadheim, P.A.; Aronsen, S.L. Serpens: A Highly Compliant Low-Cost ROS-Based Snake Robot with Series Elastic Actuators, Stereoscopic Vision and a Screw-Less Assembly Mechanism. Appl. Sci. 2019, 9, 396. https://doi.org/10.3390/app9030396
Sanfilippo F, Helgerud E, Stadheim PA, Aronsen SL. Serpens: A Highly Compliant Low-Cost ROS-Based Snake Robot with Series Elastic Actuators, Stereoscopic Vision and a Screw-Less Assembly Mechanism. Applied Sciences. 2019; 9(3):396. https://doi.org/10.3390/app9030396
Chicago/Turabian StyleSanfilippo, Filippo, Erlend Helgerud, Per Anders Stadheim, and Sondre Lieblein Aronsen. 2019. "Serpens: A Highly Compliant Low-Cost ROS-Based Snake Robot with Series Elastic Actuators, Stereoscopic Vision and a Screw-Less Assembly Mechanism" Applied Sciences 9, no. 3: 396. https://doi.org/10.3390/app9030396