The Design and Optimization of an Interior, Permanent Magnet Synchronous Machine Applied in an Electric Traction Vehicle Requiring a Low Torque Ripple


Abstract
:1. Introduction
2. Machine Topology and Finite Element Model
- A displacement current and the skin effect in the stator windings are ignored.
- Materials are isotropic. Permeability and conductivity of the materials are constant except the stator core and the rotor yoke.
- The displacement current is ignored.
3. Optimization, Considering the Cogging Torque and Torque Ripple
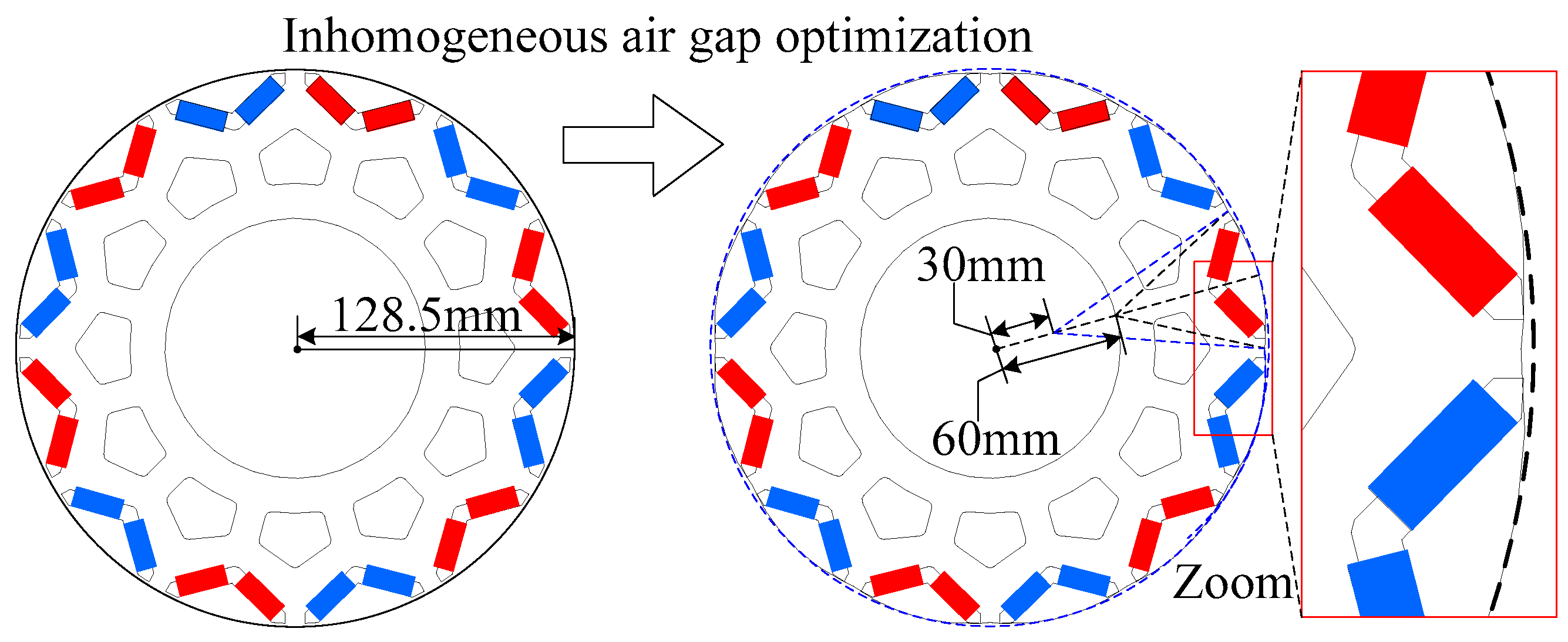
3.1. The Optimization of the Rotor Iron Core by Adopting a Rotor Pole Arc Offset
3.1.1. Air-Gap Flux Density Distributions
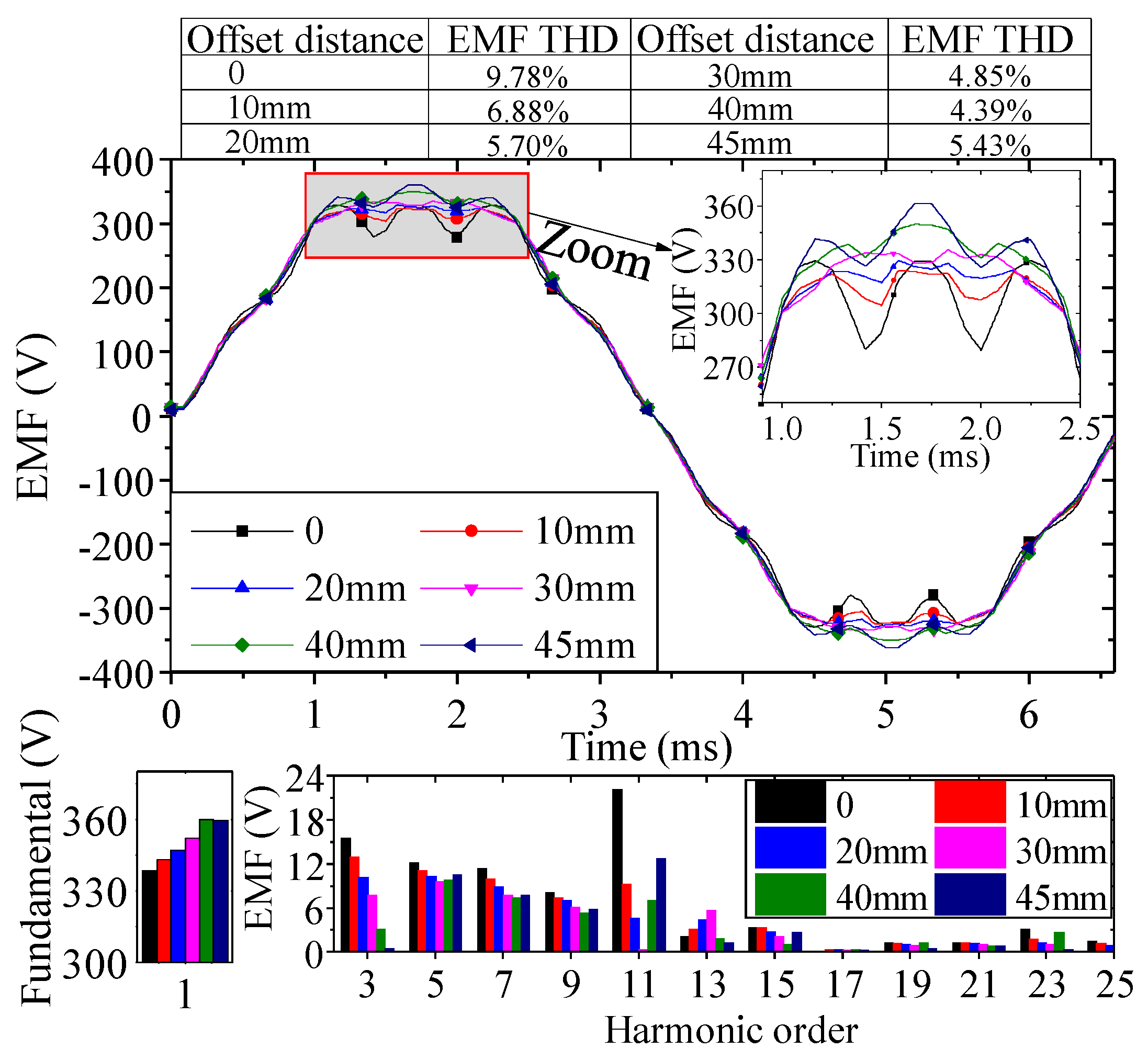
3.1.2. Back Electro-Motive-Force Waveforms
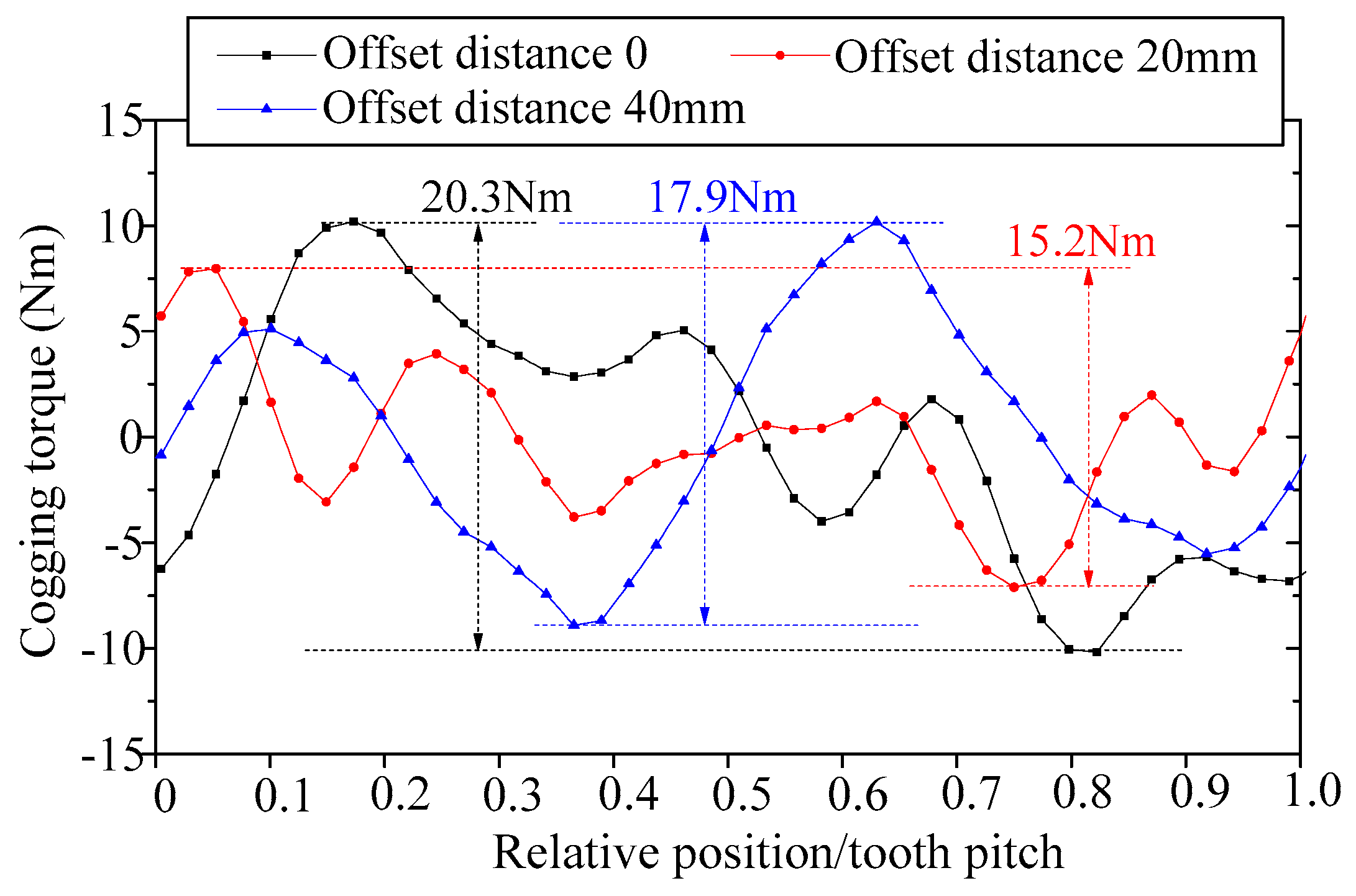
3.1.3. Cogging Torque and Torque Ripple
3.2. Optimization of Permanent Magnet and Iron Bridge
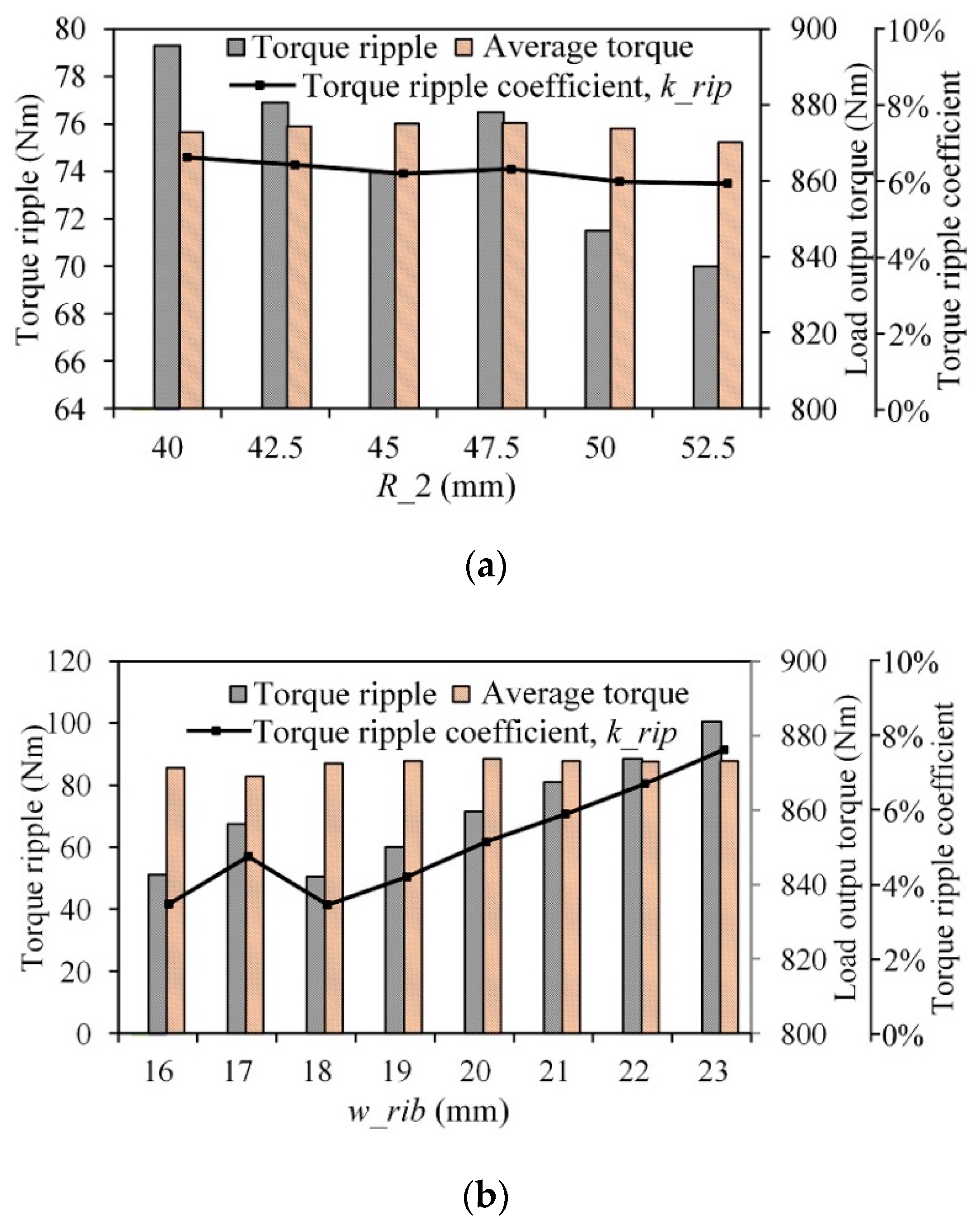
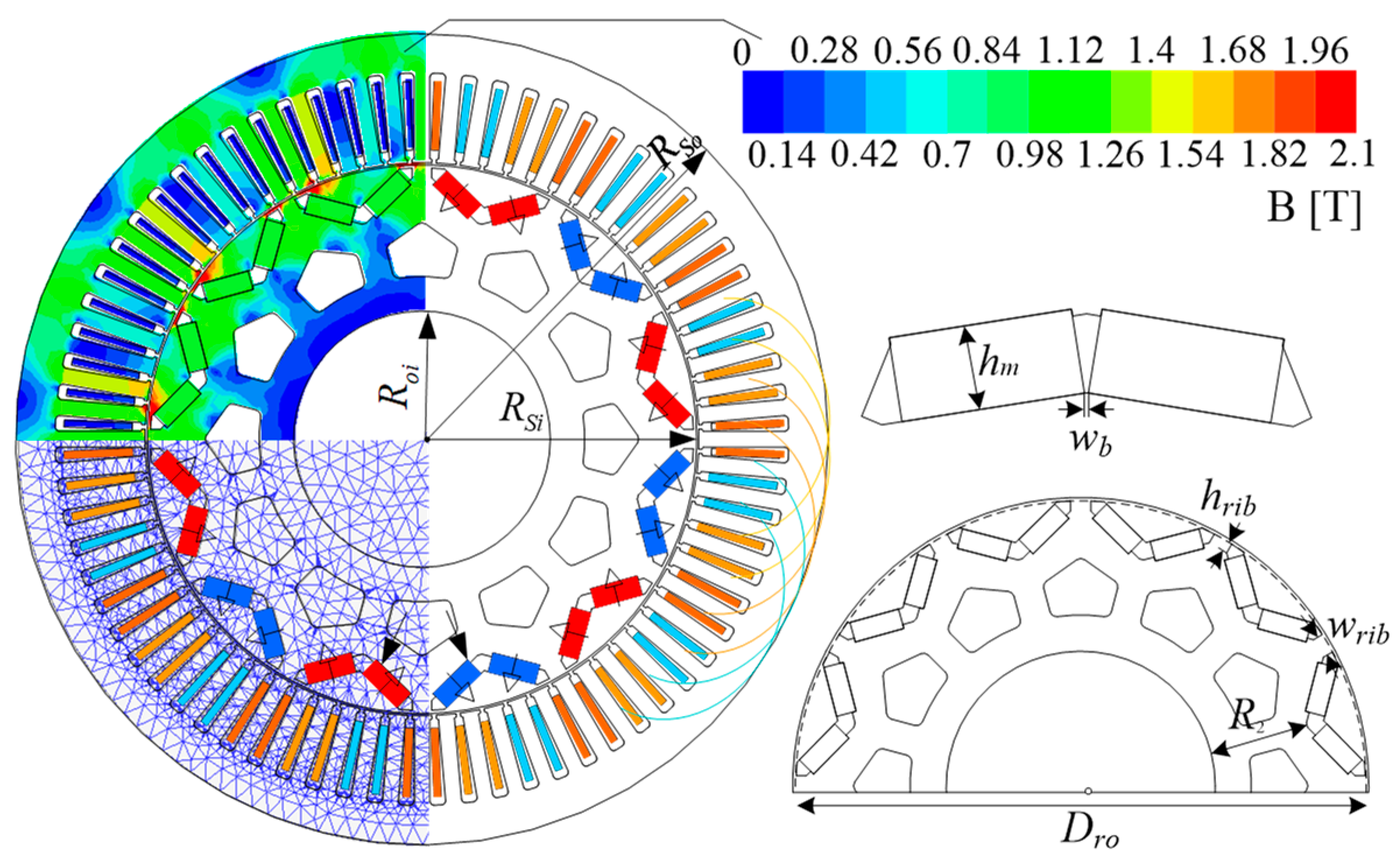
- As shown in Figure 8a, the average torque changed slightly with the variation of R2. Thus, the influence of R2 on the torque output capabilities was negligible. However, the torque ripples and thus krip varied greatly with R2. When R2 was 52.5 mm, the output torque ripple was the smallest and tended to be stable, with a value of 70 Nm and a krip of 5.8%, which is acceptable in heavy-load traction vehicles.
- As shown in Figure 8b, the output torque was almost unchanged with the increase of distance between the poles, i.e., wrib, because the back-EMF and inductances remained unchanged. As for the torque ripple, it achieved the peak value of 51.2 Nm and krip of 7.9% when wrib was 16 mm, and exhibited a nonlinear trend with the variation of wrib. The lowest krip was 4.18% when wrib was 18 mm, which is much lower than the case of 16 mm. This can be explained, as when the wrib is changed, the pole arc coefficient and the air-gap magnetic field harmonic content changes significantly.
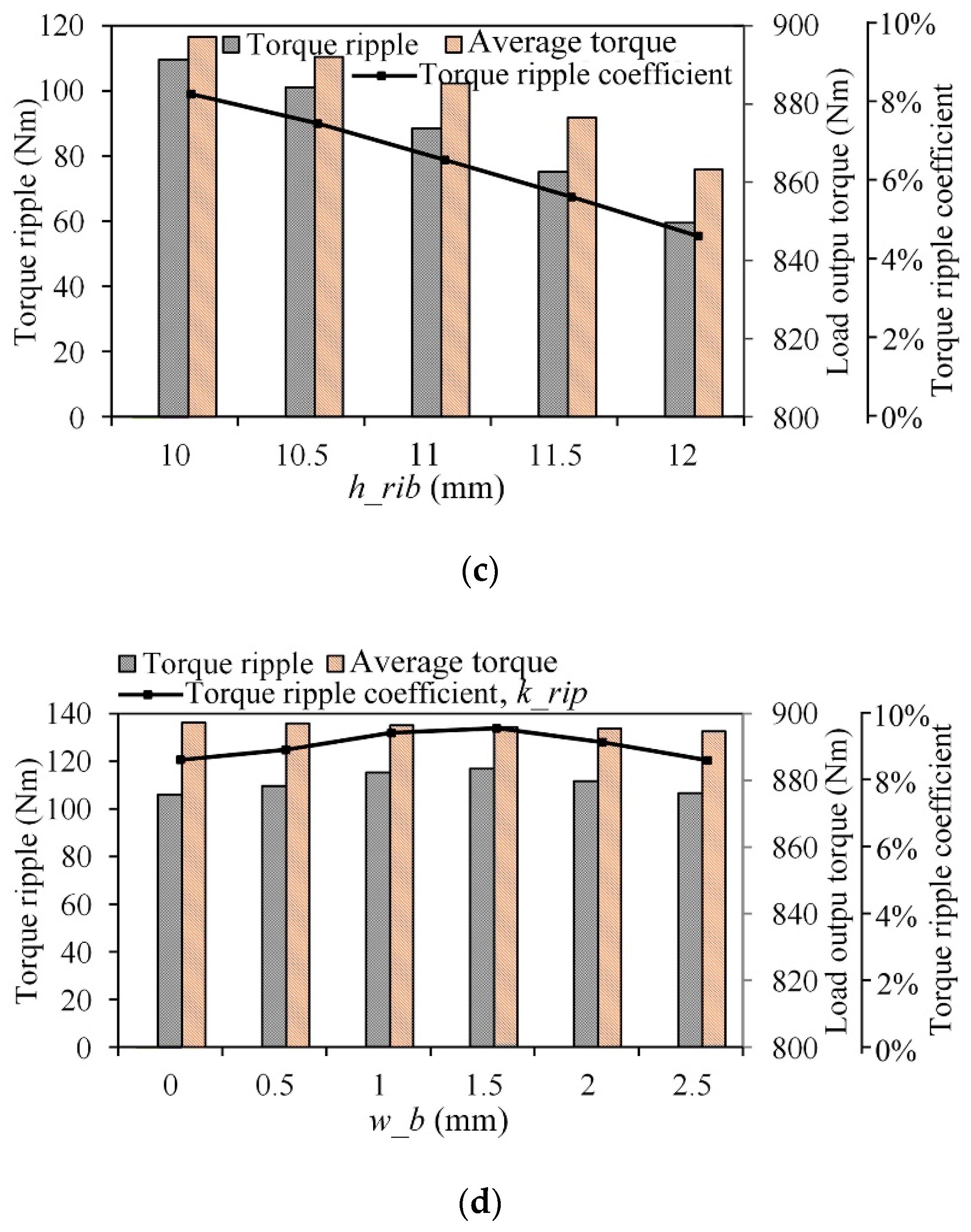
- As shown in Figure 8c, both the output torque and torque ripple reduced linearly with the increase of hrib; an apparent variation was found in the torque ripple especially. The average output torque was 897.1 Nm and the krip wass 8.78% when hrib was 10 mm; meanwhile, they were 863.2 Nm and 3.8% respectively, when hrib was 12 mm. Comparing those two cases, it was found that with the cost of 3.8% reduced torque output, the krip could be reduced by 45.6%.
- Figure 8d shows that wb had a negligible influence on torque ripples, since it mainly provides necessary mechanical strength, and will enlarge the permanent magnet leakage fluxes, and should be designed as small as possible.
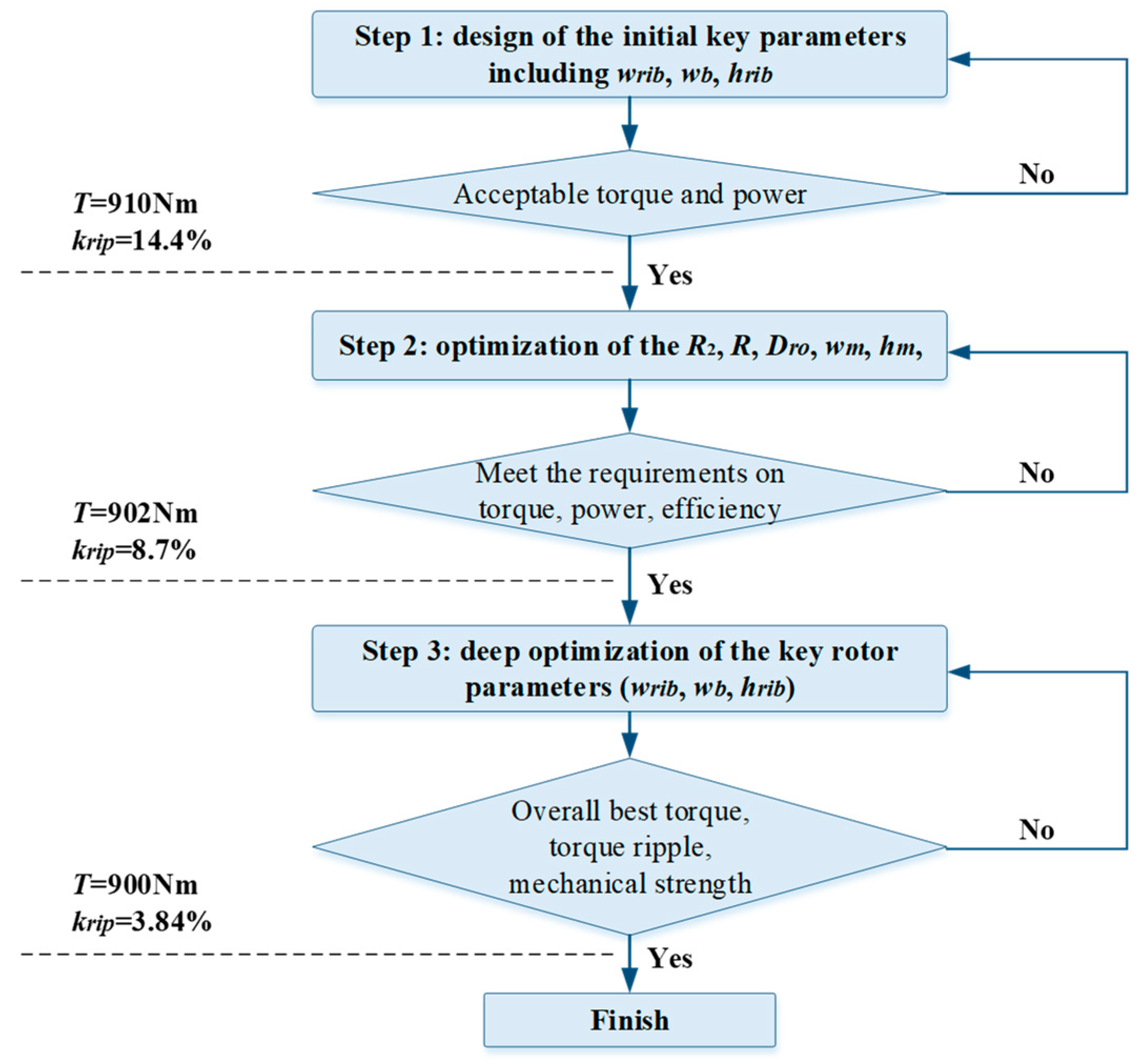
3.3. The Comprehensive Optimization of the Rotor’s Key Paramenters
3.3.1. The Three Key Rotor Parameters
3.3.2. Torque Performances of the Final Machine
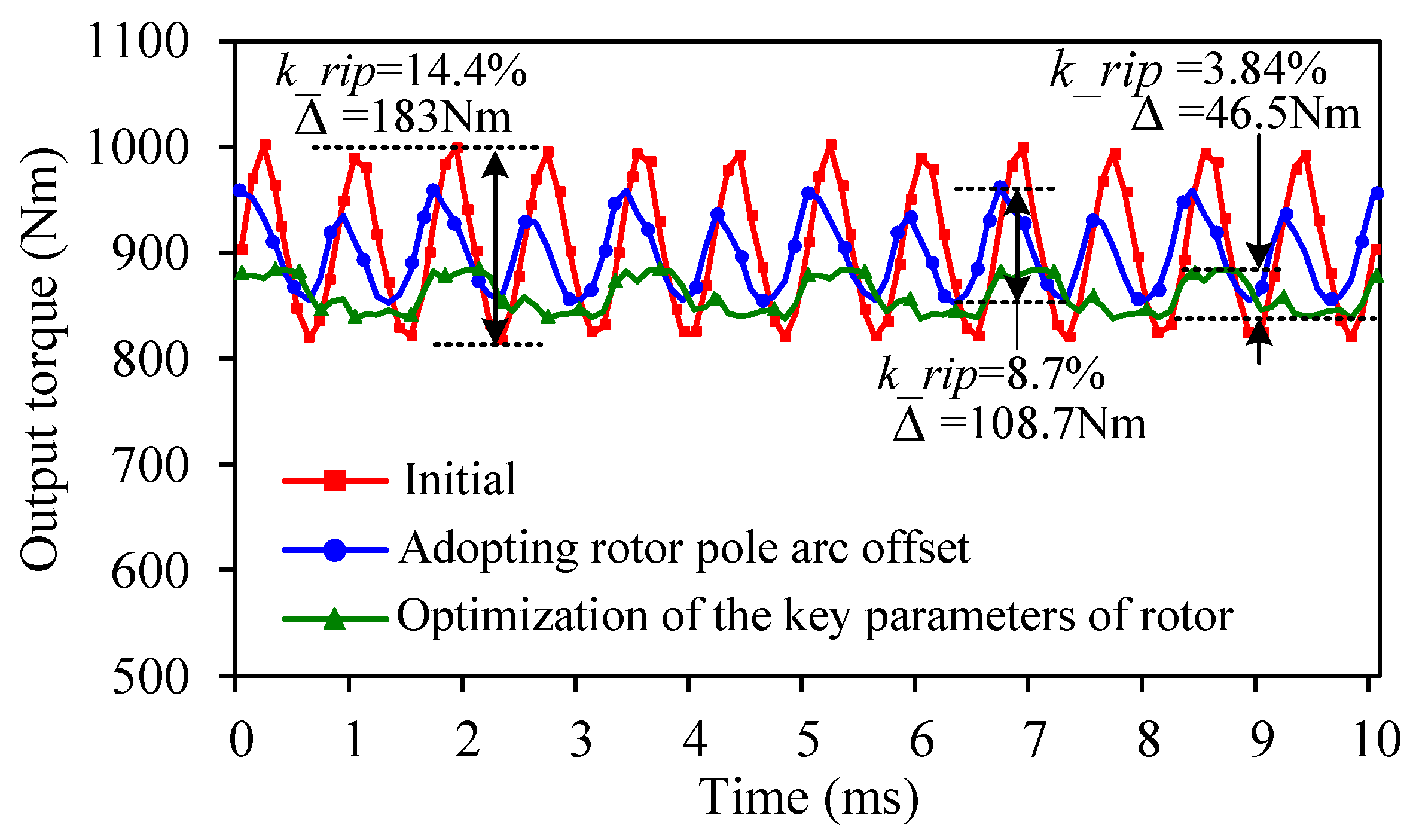
3.3.3. Brief Discussion on Different Optimization Methods
- Reference [3] analyzes an IPMSM machine which has a similar V-type magnets topology with the machine in this paper, but a slightly different pole-slot fit. Reference [9] optimizes an IPMSM machine by using asymmetric rotor topology. Overall, the torque ripple is larger than the that obtained in this paper.
- References [5,7,8] present the optimization of IPMSM machines with I-type magnet location. As can be seen, the torque ripples can be significantly reduced after the optimization, which, however, are still larger than that present in this paper, except for the machine in [7]. It should be emphasized that the complex hybrid Ferrite and rear-earth permanent magnets are employed in [7] to reduce the torque ripple, which, meantime, will cause greater machine cost and much more manufacturing difficulties, and consequently degrade its potential in industrial applications.
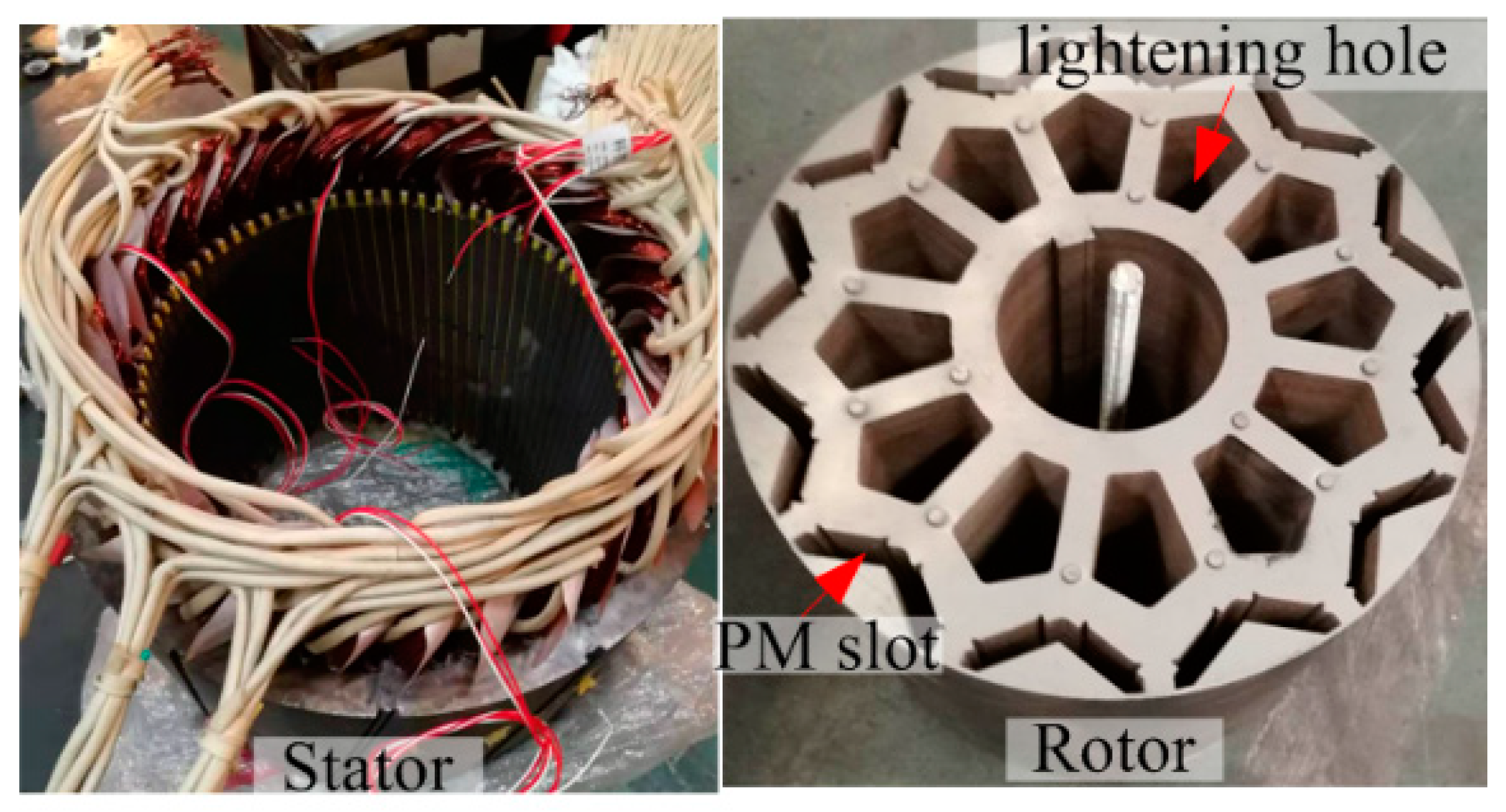
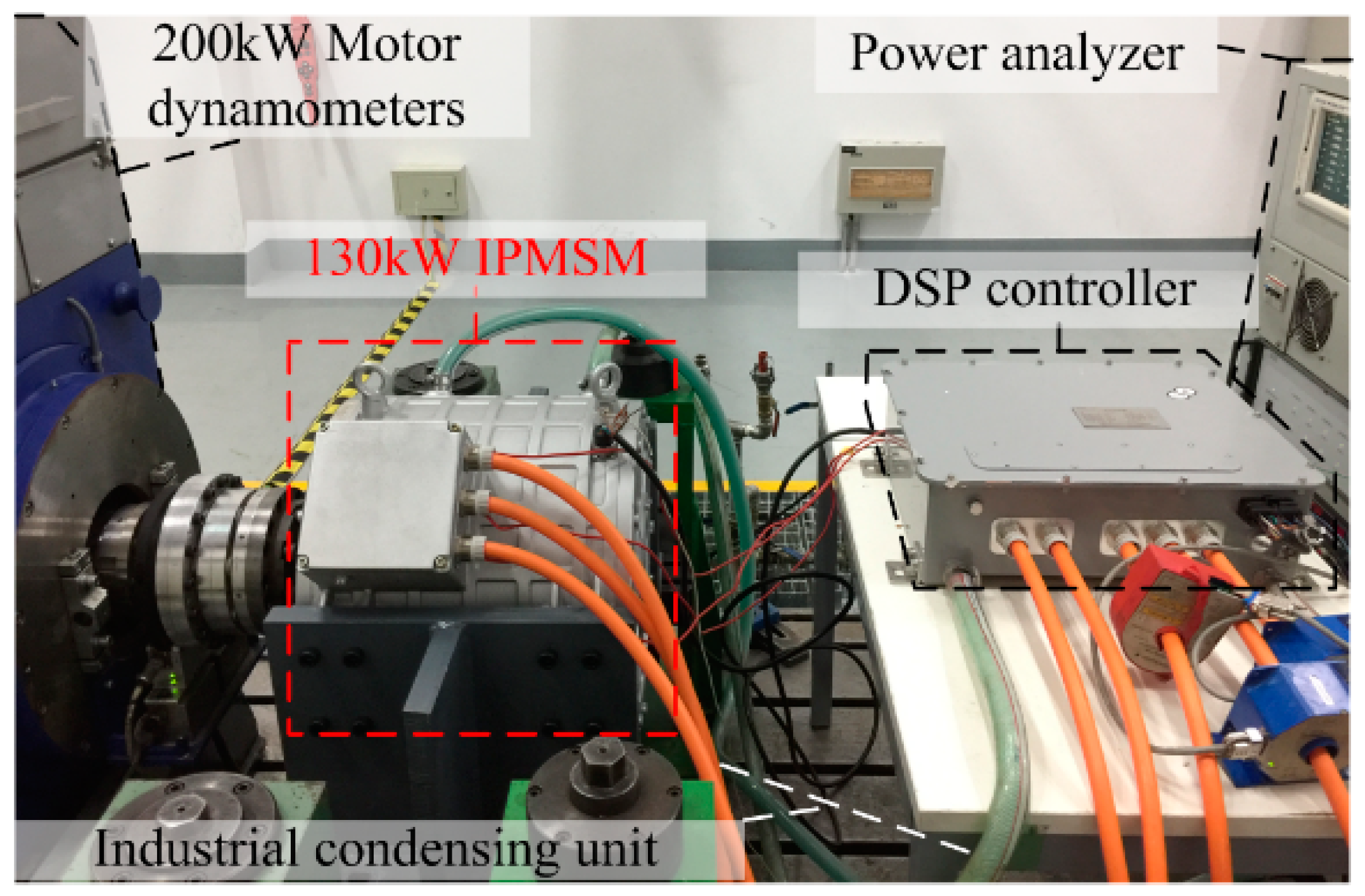
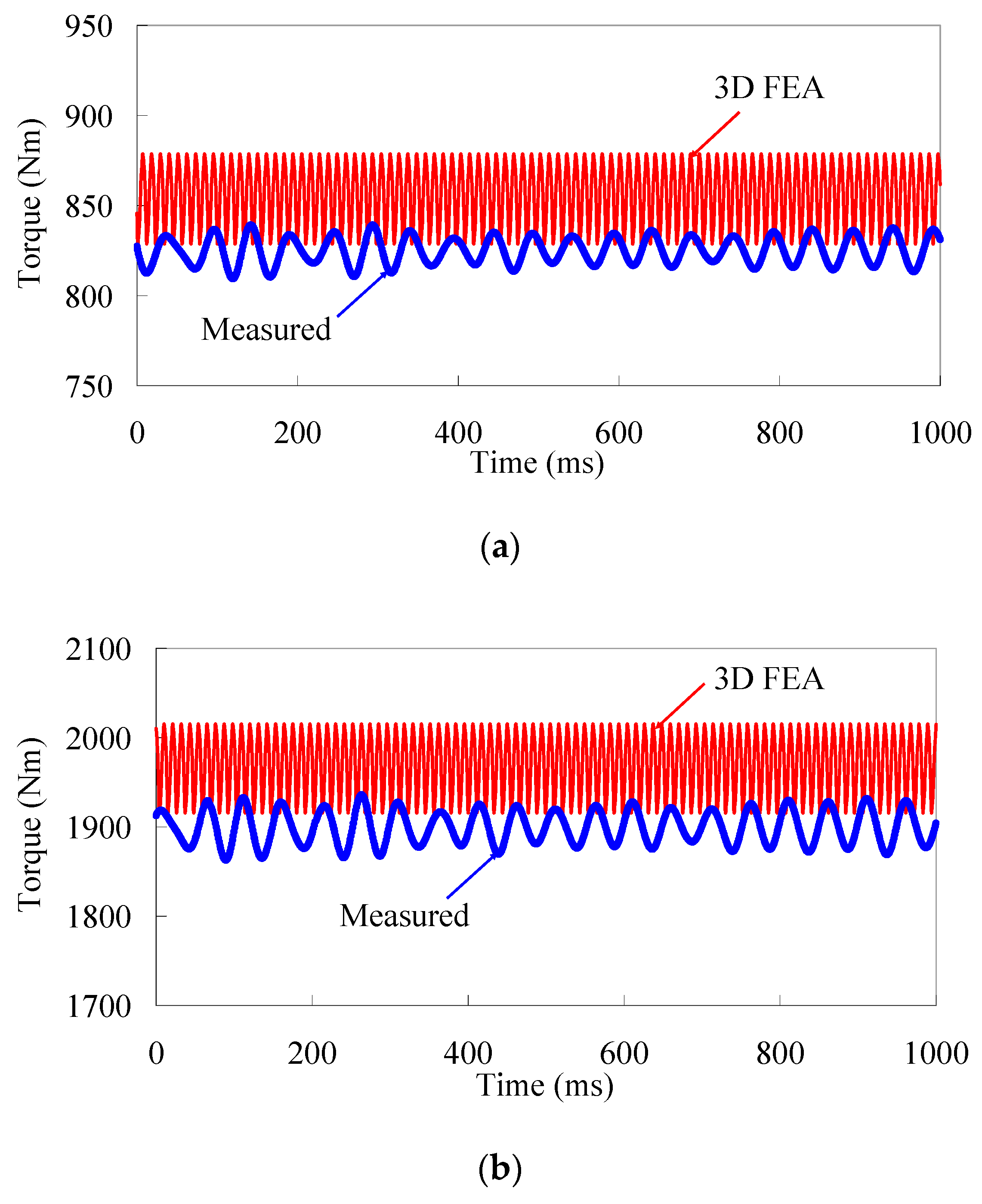
4. Experimental Validations
5. Discussions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Feng, S.; Jiang, W.; Zhang, Z.; Zhang, J.; Li, Y.; Wang, Y. Study of efficiency characteristics of Interior Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar]
- Shanshal, A.; Hoang, K.; Atallah, K. High-Performance Ferrite Permanent Magnet Brushless Machines. IEEE Trans. Magn. 2017, 55, 8104504. [Google Scholar] [CrossRef]
- Wu, S.N.; Tang, R.Y.; Tong, W.M.; Han, X.Y. Analytical Model for Predicting Vibration Due to Magnetostriction in Axial Flux Permanent Magnet Machines with Amorphous Metal Cores. IEEE Trans. Magn. 2017, 53, 2001508. [Google Scholar] [CrossRef]
- Li, J.; Xu, Y.; Zou, J.; Wang, Q.; Liang, W. Analysis and Reduction of Magnet Loss by Deepening Magnets in Interior Permanent Magnet Machines with a Pole/Slot Ratio of 2/3. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Tiegna, H.; Amara, Y.; Barakat, G. Study of Cogging Torque in Axial Flux Permanent Magnet Machines Using an Analytical Model. IEEE Trans. Magn. 2014, 50, 845–848. [Google Scholar] [CrossRef]
- Ren, W.; Xu, Q.; Li, Q. Asymmetrical V-Shape Rotor Configuration of an Interior Permanent Magnet Machine for Improving Torque Characteristics. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Zhu, S.; Chen, W.; Xie, M.; Liu, C.; Wang, K. Electromagnetic Performance Comparison of Multi-Layered Interior Permanent Magnet Machines for EV Traction Applications. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Bozhko, S.; Rashed, M.; Hill, C.I.; Yeoh, S.S.; Yang, T. Flux-Weakening Control of Electric Starter–Generator Based on Permanent-Magnet Machine. IEEE Trans. Transp. Electrif. 2017, 3, 864–877. [Google Scholar] [CrossRef]
- Wang, A.; Jia, Y.; Soong, W.L. Comparison of Five Topologies for an Interior Permanent-Magnet Machine for a Hybrid Electric Vehicle. IEEE Trans. Magn. 2011, 47, 3606–3609. [Google Scholar] [CrossRef]
- Dajaku, G.; Hofmann, H.; Hetemi, F.; Dajaku, X.; Xie, W.; Gerling, D. Comparison of Two Different IPM Traction Machines With Concentrated Winding. IEEE Trans. Ind. Electron. 2016, 63, 4137–4149. [Google Scholar] [CrossRef]
- Valente, G.; Papini, L.; Formentini, A.; Gerada, C.; Zanchetta, P. Radial Force Control of Multisector Permanent-Magnet Machines for Vibration Suppression. IEEE Trans. Ind. Electron. 2018, 65, 5395–5405. [Google Scholar] [CrossRef]
- Lan, H.; Zou, J.; Xu, Y.; Liu, M. Investigation of Unbalanced Magnetic Force in Permanent Magnet Synchronous Machines With Asymmetric Design. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Pop, C.V.; Birte, O.; Fodorean, D. Noise and Vibrations Analysis of a Permanent Magnet Synchronous Machine for Light Electric Vehicle. In Proceedings of the 52nd International Universities Power Engineering Conference (UPEC), Heraklion, Greece, 28–1 August 2017; p. 17451257. [Google Scholar]
- Jin, L.; Wang, F.; Yang, Q. Performance Analysis and Optimization of Permanent Magnet Synchronous Motor Based On Deep Learning. In Proceedings of the 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017; pp. 1–5. [Google Scholar]
- Han, S.H.; Jahns, T.M.; Soong, W.L.; Güven, M.K.; Illindala, M.S. Torque Ripple Reduction in Interior Permanent Magnet Synchronous Machines Using Stators With Odd Number of Slots Per Pole Pair. IEEE Trans. Energy Convers. 2010, 25, 118–127. [Google Scholar] [CrossRef]
- Takahashi, N.; Yamada, T.; Shimose, S.; Miyagi, D. Optimization of Rotor of Actual IPM Motor Using ON/OFF Method. IEEE Trans. Magn. 2011, 47, 1262–1265. [Google Scholar] [CrossRef]
- Lim, S.; Min, S.; Hong, J.P. Low Torque Ripple Rotor Design of the Interior Permanent Magnet Motor Using the Multi-Phase Level-Set and Phase-Field Concept. IEEE Trans. Magn. 2012, 48, 907–910. [Google Scholar] [CrossRef]
- Sizov, G.Y.; Zhang, P.; Ionel, D.M.; Demerdash, N.A.O.; Rosu, M. Automated Multi-Objective Design Optimization of PM AC Machines Using Computationally Efficient FEA and Differential Evolution. IEEE Trans. Ind. Appl. 2013, 49, 2086–2096. [Google Scholar] [CrossRef]
- Ren, W.; Xu, Q.; Li, Q.; Zhou, L. Reduction of Cogging Torque and Torque Ripple in Interior PM Machines with Asymmetrical V-Type Rotor Design. IEEE Trans. Magn. 2016, 52, 1–5. [Google Scholar] [CrossRef]
- Feng, G.; Lai, C.; Kar, N.C. Practical Testing Solutions to Optimal Stator Harmonic Current Design for PMSM Torque Ripple Minimization Using Speed Harmonics. IEEE Trans. Power Electron. 2018, 33, 5181–5191. [Google Scholar] [CrossRef]
- Navardi, M.J.; Milimonfared, J.; Talebi, H.A. Torque and Flux Ripples Minimization of Permanent Magnet Synchronous Motor by a Predictive-Based Hybrid Direct Torque Control. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1662–1670. [Google Scholar] [CrossRef]
- Choi, Y.S.; Choi, H.H.; Jung, J.W. Feedback Linearization Direct Torque Control with Reduced Torque and Flux Ripples for IPMSM Drives. IEEE Trans. Power Electron. 2016, 31, 3728–3737. [Google Scholar] [CrossRef]
- Liu, Q.; Hameyer, K. Torque ripple minimization for direct torque control of PMSM with modified FCSMPC. IEEE Trans. Ind. Appl. 2016, 52, 4855–4864. [Google Scholar] [CrossRef]
- Ren, Y.; Zhu, Z.Q. Reduction of Both Harmonic Current and Torque Ripple for Dual Three-Phase Permanent-Magnet Synchronous Machine Using Modified Switching-Table-Based Direct Torque Control. IEEE Trans. Ind. Electron. 2015, 62, 6671–6683. [Google Scholar] [CrossRef]
- Li, W.L.; Wang, J.; Zhang, X.C.; Kou, B.Q. Loss Calculation and Thermal Simulation Analysis of High-Speed PM Synchronous Generators with Rotor Topology. In Proceedings of the International Conference on Computer Application and System Modeling (ICCASM), Taiyuan, China, 22–24 October 2010; Volume 14, pp. 612–616. [Google Scholar]
- Qiu, H.; Yu, W.; Tang, B.; Li, W.; Yang, C.; Wang, Y. Effects of driving modes on permanent magnet motor electromagnetic and temperature fields at limit conditions. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2016, 35, 2045–2062. [Google Scholar] [CrossRef]
- Spargo, C.M.; Mecrow, B.C.; Widmer, J.D. A Seminumerical Finite-Element Postprocessing Torque Ripple Analysis Technique for Synchronous Electric Machines Utilizing the Air-Gap Maxwell Stress Tensor. IEEE Trans. Magn. 2014, 50, 1–9. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Specifications | Value | Key Parameters | Value |
|---|---|---|---|
| Rated power output | 130 kW | Number of poles | 12 |
| Rated speed | 1500 r/min | Number of slots | 72 |
| DC bus voltage | 540 V | Stator outer diameter | 190 mm |
| Rated current | 235 A | Stator inner diameter | 129.5 mm |
| Winding connection mode | Y | Core length | 240 mm |
| Number of phases | 3 | PM width | 9 mm |
| Rate torque output | 830 Nm | PM length per pole | 45 mm |
| Item | hrib | wrib | wb |
|---|---|---|---|
| Average torque | High influence | medium | medium |
| Torque ripple | medium | High influence | medium |
| Parameter | Initial | Optimized | Obtained |
|---|---|---|---|
| Dro | 240 mm | 254 mm | in step 2 of the design process |
| R2 | 45 mm | 64.5 mm | |
| hm | 8.2 mm | 8.9 mm | |
| wm | 48 mm | 45.2 mm | |
| wb | 2 mm | 3.2 mm | in step 3 of the design process |
| hrib | 11 mm | 4.5 mm | |
| wrib | 18 mm | 9 mm |
| Machine Type | Optimization Method | Torque Ripple (%) | |
|---|---|---|---|
| Original | Optimized | ||
| V-type IPMSM (this paper) | Rotor topology | 183 Nm (14.4%) | 46.4 Nm (3.84%) |
| V-type IPMSM [15] | Pole and slot matching | 61 Nm (8.2%) | 29.2 Nm (4.6%) |
| V-type IPMSM [19] | Asymmetrical rotor | 1.29 Nm (12.5%) | 0.44 Nm (4.38%) |
| I-type IPMSM [16] | Rotor topology | 2.15 Nm (12.55%) | 2.04 Nm (6.95%) |
| I-type IPMSM [17] | Rotor topology | 44.6 Nm (56.2%) | 26.3 Nm (2.8%) |
| I-type IPMSM [18] | Computationally efficient FEA | 1.61 Nm (10.6%) | 1.02 Nm (4.9%) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Yu, W.; Hua, W.; Cao, R.; Qiu, H.; Guo, A. The Design and Optimization of an Interior, Permanent Magnet Synchronous Machine Applied in an Electric Traction Vehicle Requiring a Low Torque Ripple. Appl. Sci. 2019, 9, 3634. https://doi.org/10.3390/app9173634
Zhang G, Yu W, Hua W, Cao R, Qiu H, Guo A. The Design and Optimization of an Interior, Permanent Magnet Synchronous Machine Applied in an Electric Traction Vehicle Requiring a Low Torque Ripple. Applied Sciences. 2019; 9(17):3634. https://doi.org/10.3390/app9173634
Chicago/Turabian StyleZhang, Gan, Wenfei Yu, Wei Hua, Ruiwu Cao, Hongbo Qiu, and Aili Guo. 2019. "The Design and Optimization of an Interior, Permanent Magnet Synchronous Machine Applied in an Electric Traction Vehicle Requiring a Low Torque Ripple" Applied Sciences 9, no. 17: 3634. https://doi.org/10.3390/app9173634