Reduction of Moving Target Time-of-Flight Measurement Uncertainty in Femtosecond Laser Ranging by Singular Spectrum Analysis Based Filtering

 , and
, and
Abstract
:1. Introduction
2. Methods
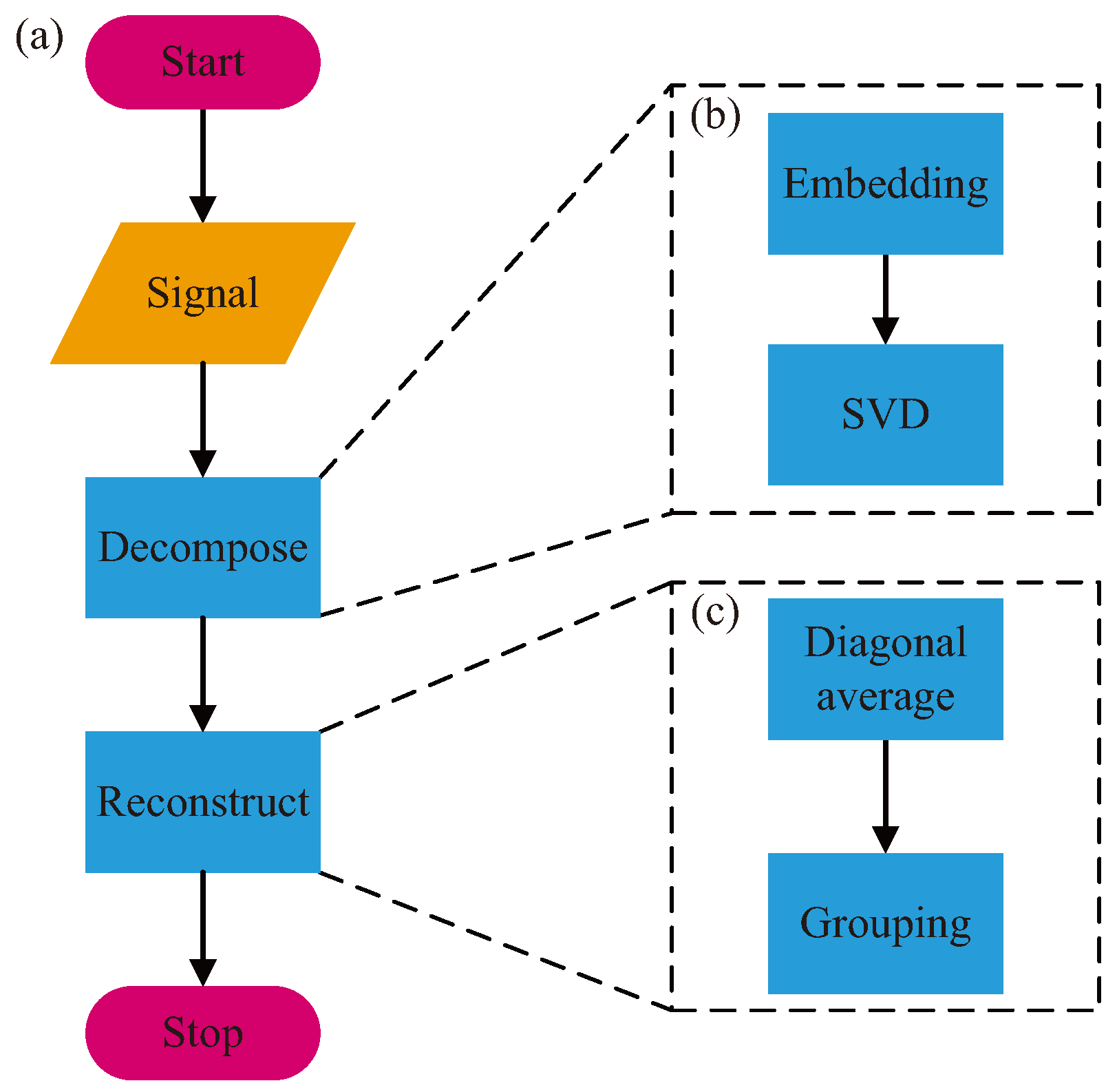
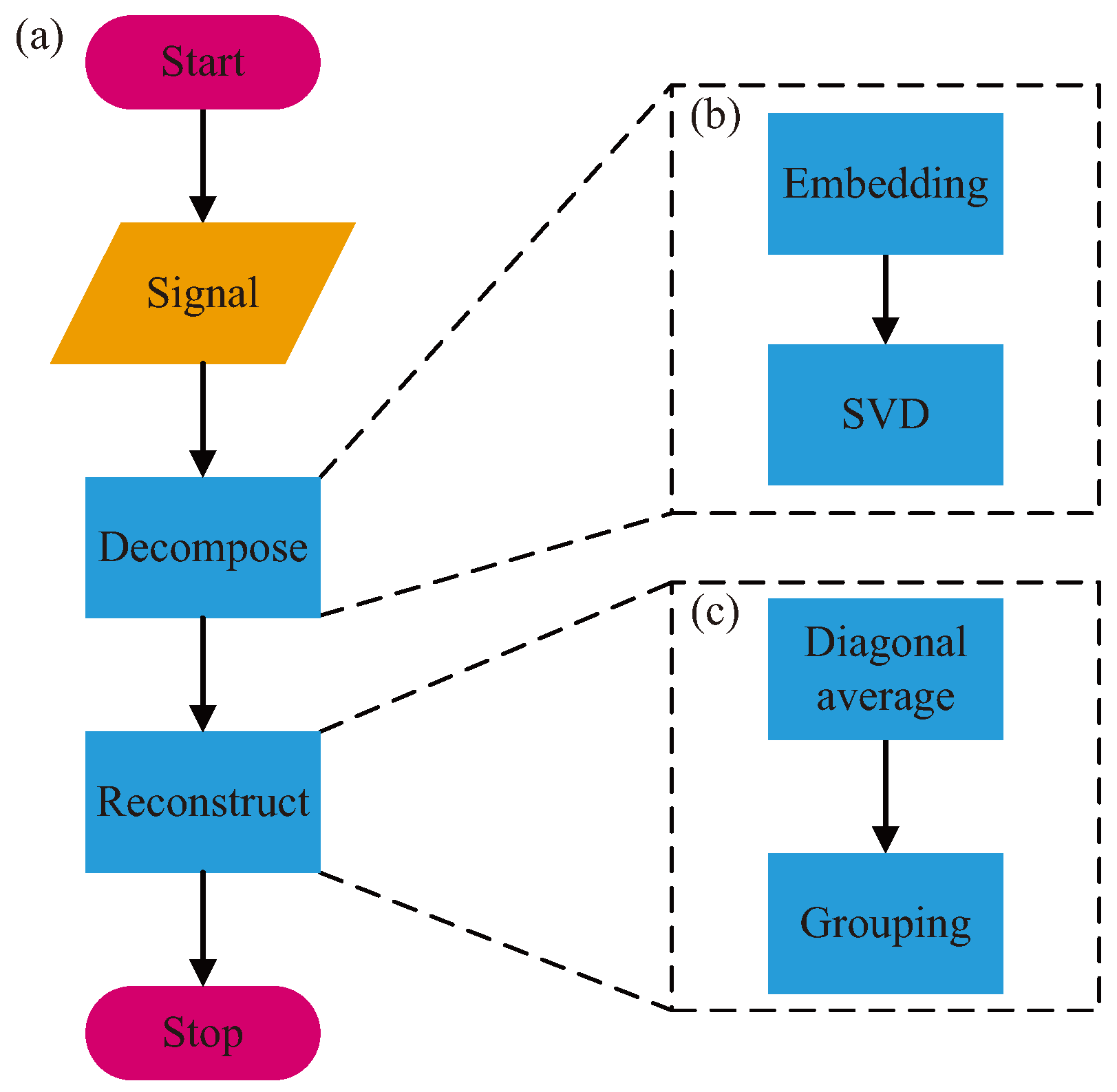
2.1. Singular Spectrum Analysis
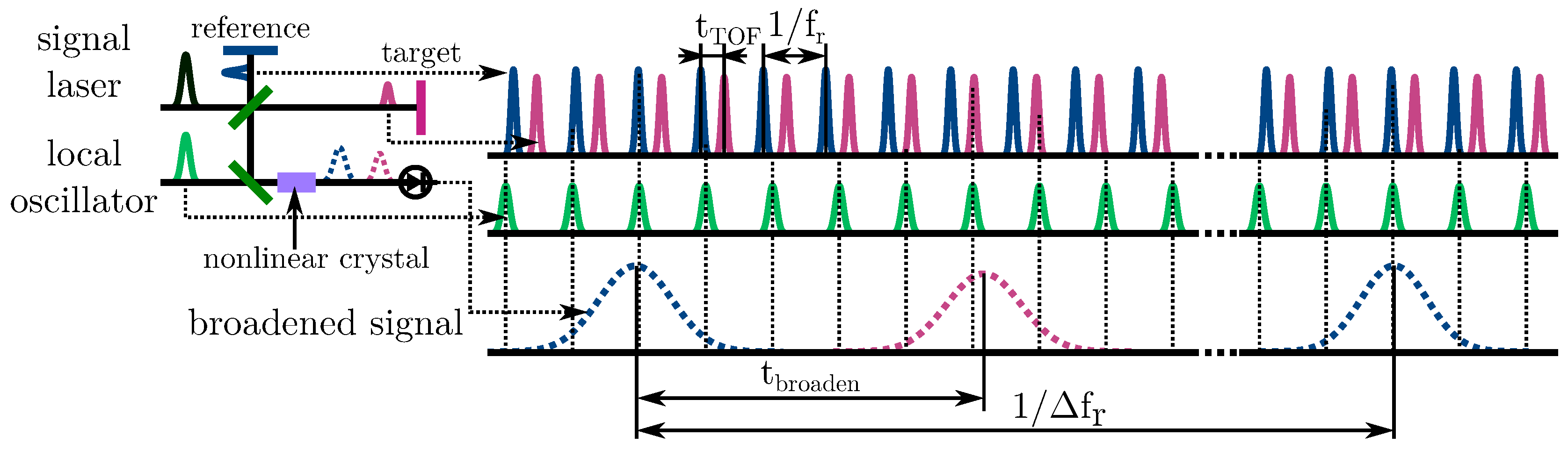
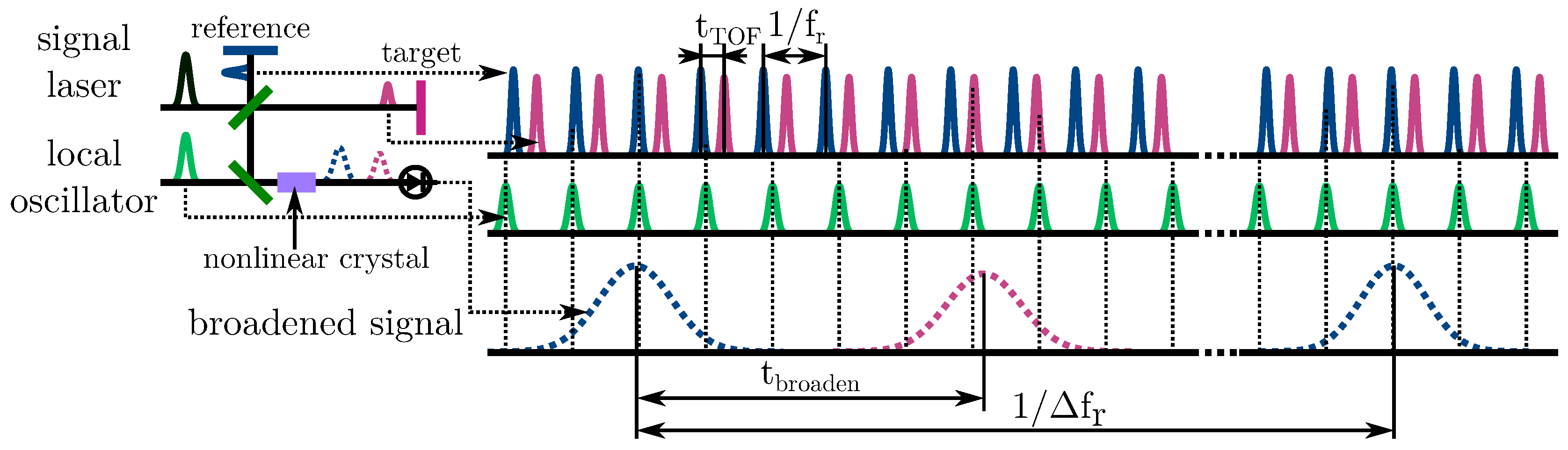
2.2. Absolute Ranging Based on a Pair of Femtosecond Lasers
3. Simulation
4. Experiment
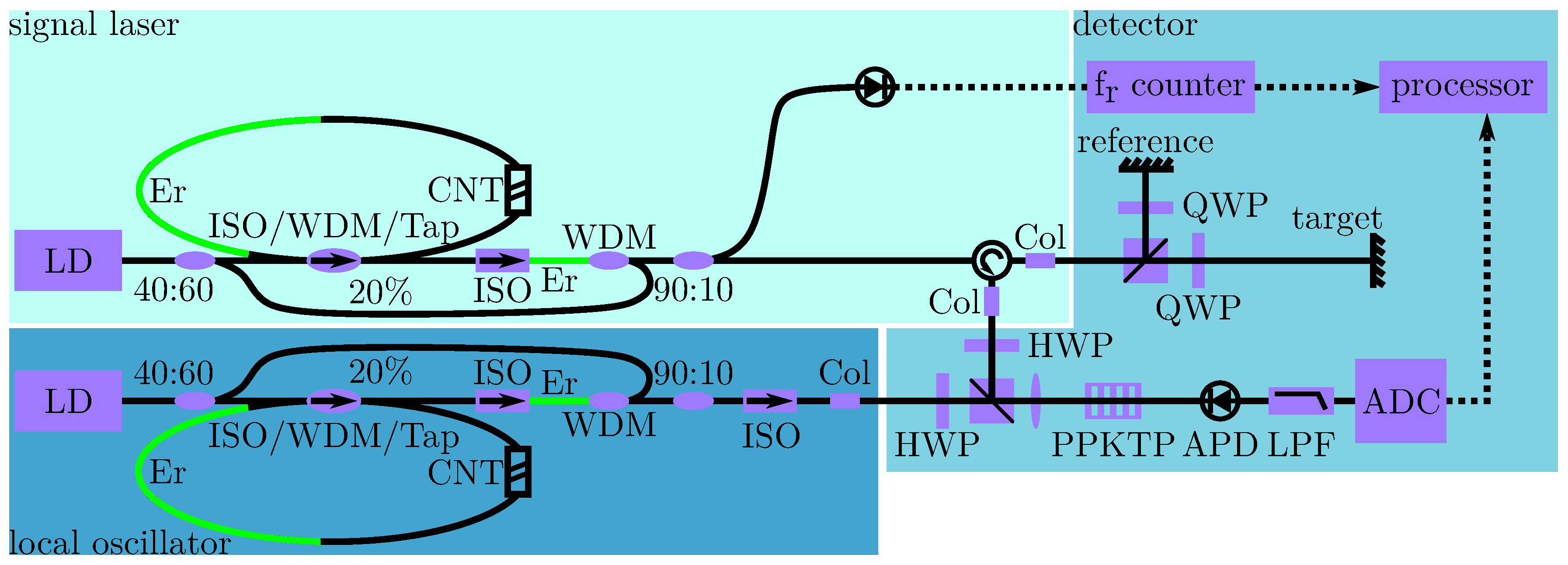
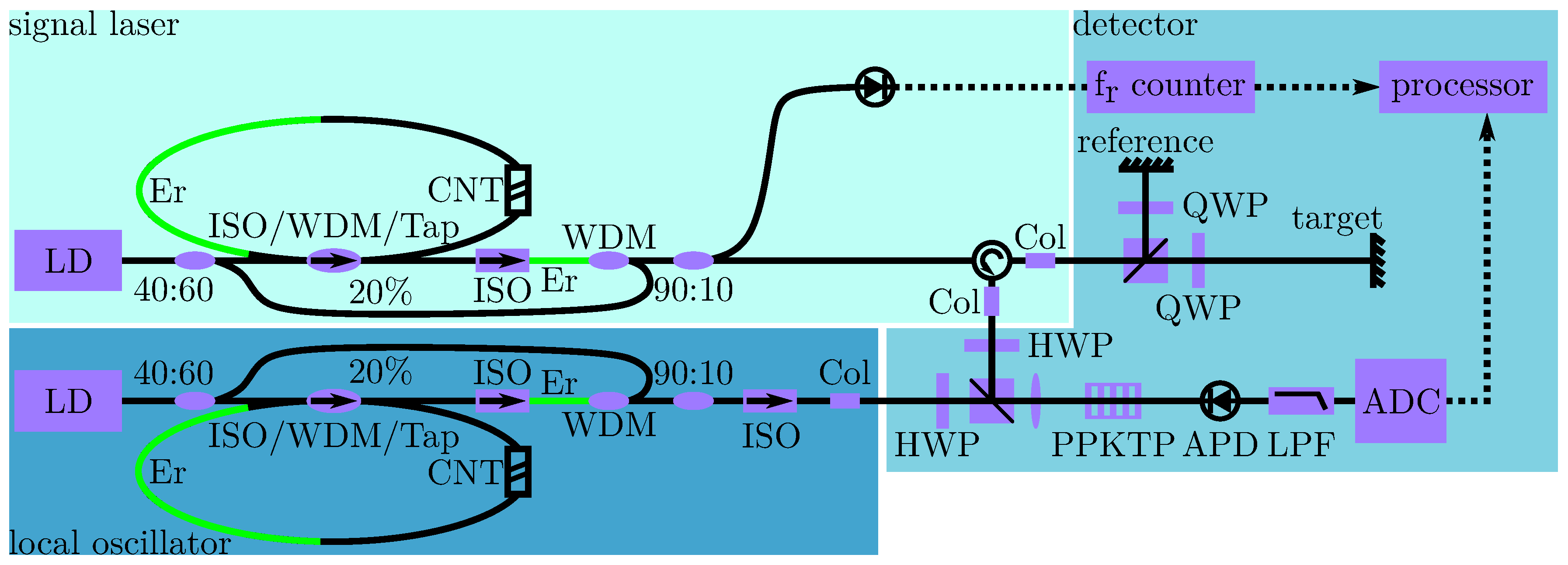
4.1. Experimental Setup
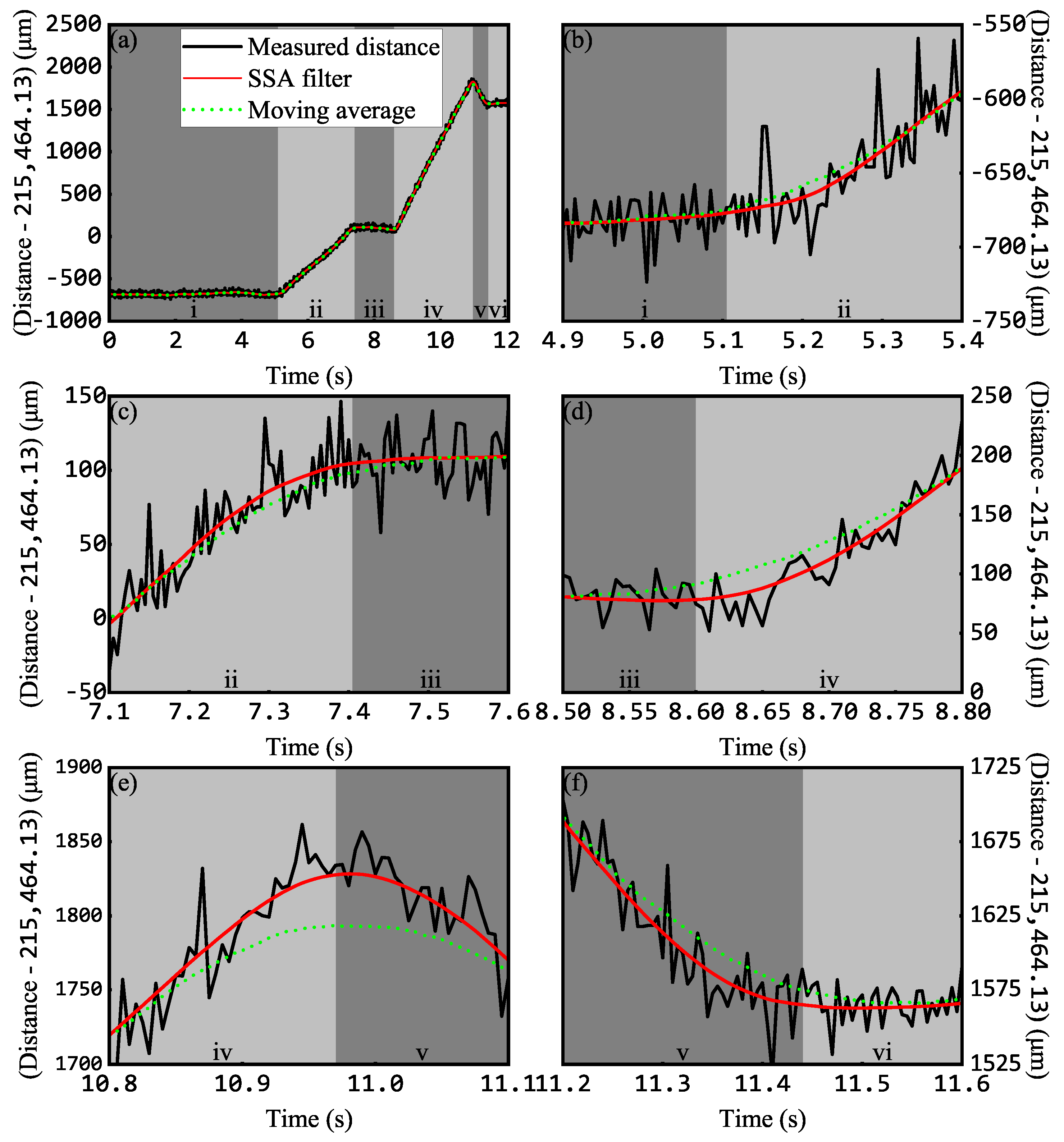
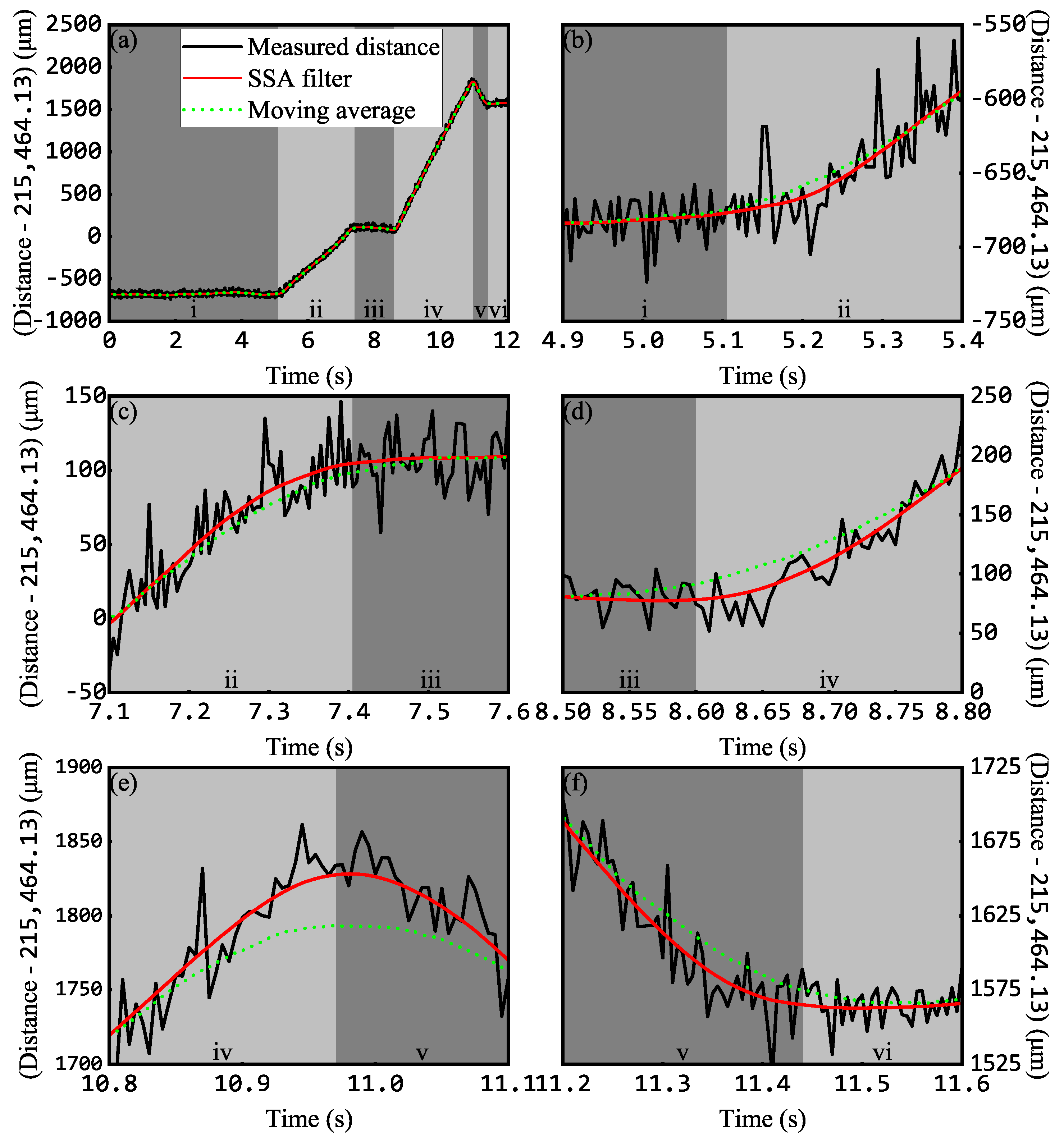
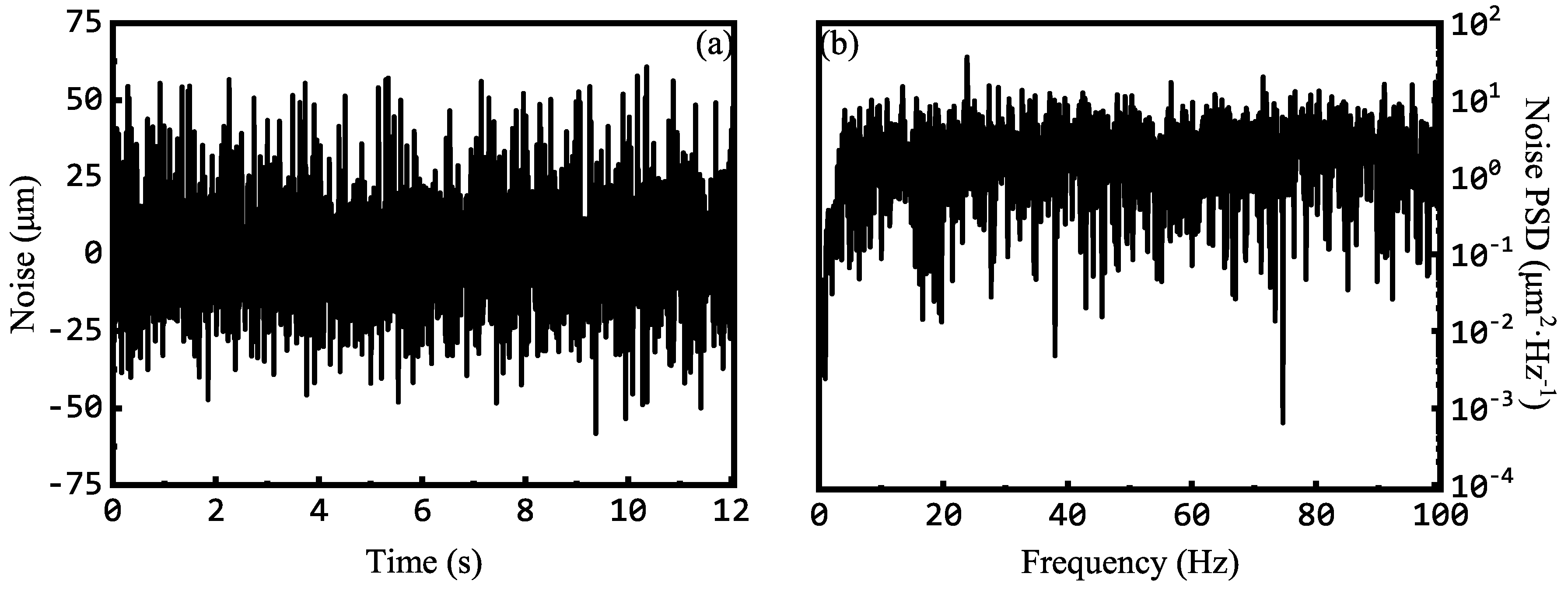
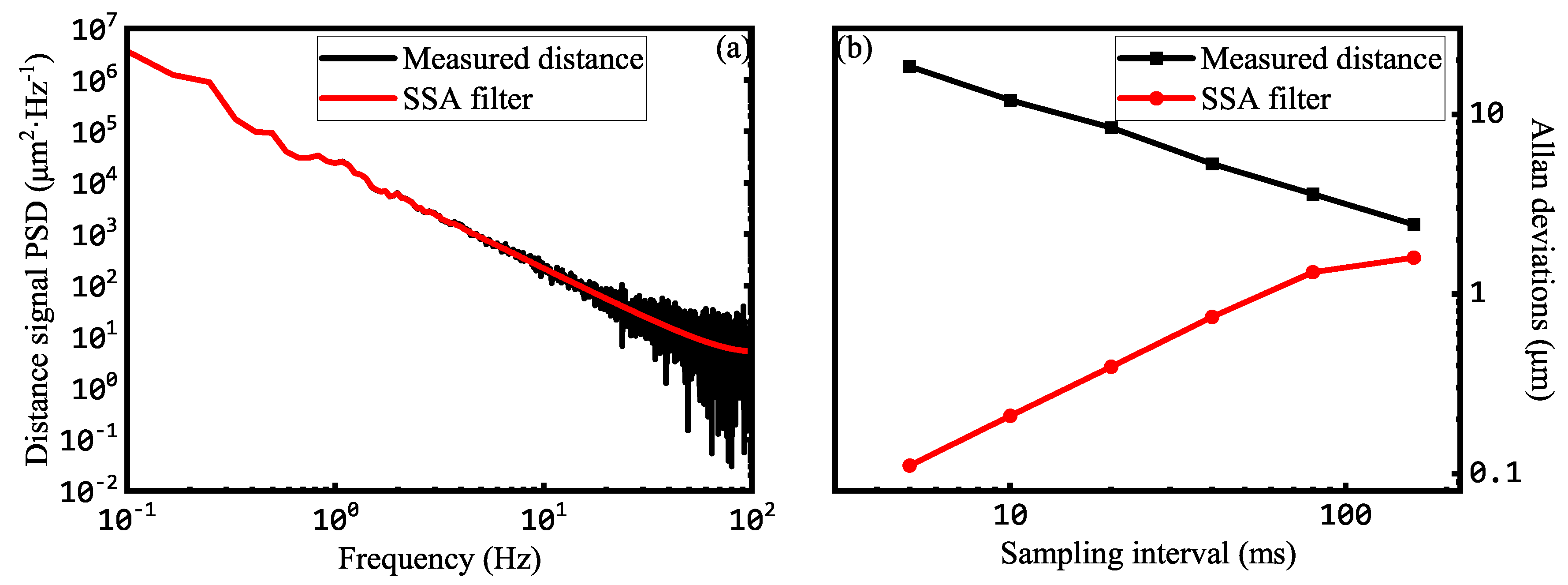
4.2. Experimental Data Processing
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, S.W. Metrology: Combs rule. Nat. Photonics 2009, 3, 313–314. [Google Scholar] [CrossRef]
- Schuhler, N.; Salvadé, Y.; Lévêque, S.; Dändliker, R.; Holzwarth, R. Frequency-comb-referenced two-wavelength source for absolute distance measurement. Opt. Lett. 2006, 31, 3101–3103. [Google Scholar] [CrossRef] [PubMed]
- Cui, M.; Schouten, R.N.; Bhattacharya, N.; Berg, S.A. Experimental demonstration of distance measurement with a femtosecond frequen cy comb laser. J. Eur. Opt. Soc. Rapid Publ. 2008, 3, 08003. [Google Scholar] [CrossRef] [Green Version]
- Baumann, E.; Giorgetta, F.R.; Coddington, I.; Sinclair, L.C.; Knabe, K.; Swann, W.C.; Newbury, N.R. Comb-calibrated frequency-modulated continuous-wave ladar for absolute distance measurements. Opt. Lett. 2013, 38, 2026–2028. [Google Scholar] [CrossRef]
- Wang, G.; Jang, Y.S.; Hyun, S.; Chun, B.J.; Kang, H.J.; Yan, S.; Kim, S.W.; Kim, Y.J. Absolute positioning by multi-wavelength interferometry referenced to the frequency comb of a femtosecond laser. Opt. Express 2015, 23, 9121–9129. [Google Scholar] [CrossRef] [PubMed]
- Minoshima, K.; Matsumoto, H. High-accuracy measurement of 240-m distance in an optical tunnel by use of a compact femtosecond laser. Appl. Opt. 2000, 39, 5512–5517. [Google Scholar] [CrossRef] [PubMed]
- Ye, J. Absolute measurement of a long, arbitrary distance to less than an optical fringe. Opt. Lett. 2004, 29, 1153–1155. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Kim, Y.J.; Lee, K.; Lee, S.; Kim, S.W. Time-of-flight measurement with femtosecond light pulses. Nat. Photonics 2010, 4, 716–720. [Google Scholar] [CrossRef]
- Lu, X.; Zhang, S.; Jeon, C.G.; Kang, C.S.; Kim, J.; Shi, K. Time-of-flight detection of femtosecond laser pulses for precise measurement of large microelectronic step height. Opt. Lett. 2018, 43, 1447–1450. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.; Takahashi, M.; Inaba, H.; Minoshima, K. Pulse-to-pulse alignment technique based on synthetic-wavelength interferometry of optical frequency combs for distance measurement. Opt. Lett. 2013, 38, 2140–2143. [Google Scholar] [CrossRef] [PubMed]
- Coddington, I.; Swann, W.C.; Nenadovic, L.; Newbury, N.R. Rapid and precise absolute distance measurements at long range. Nat. Photonics 2009, 3, 351–356. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, H.; Wu, X.; Yang, H.; Li, Y. Absolute distance measurement by dual-comb nonlinear asynchronous optical sampling. Opt. Express 2014, 22, 6597–6604. [Google Scholar] [CrossRef] [PubMed]
- Joohyung, L.; Seongheum, H.; Keunwoo, L.; Eundeok, B.; Seungman, K.; Sanghyun, L.; Seung-Woo, K.; Young-Jin, K. Absolute distance measurement by dual-comb interferometry with adjustable synthetic wavelength. Meas. Sci. Technol. 2013, 24, 045201. [Google Scholar] [CrossRef]
- Zhu, Z.; Xu, G.; Ni, K.; Zhou, Q.; Wu, G. Synthetic-wavelength-based dual-comb interferometry for fast and precise absolute distance measurement. Opt. Express 2018, 26, 5747–5757. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.A.; Newbury, N.R.; Coddington, I. Sub-micron absolute distance measurements in sub-millisecond times with dual free-running femtosecond er fiber-lasers. Opt. Express 2011, 19, 18501–18509. [Google Scholar] [CrossRef] [PubMed]
- Shi, H.; Song, Y.; Liang, F.; Xu, L.; Hu, M.; Wang, C. Effect of timing jitter on time-of-flight distance measurements using dual femtosecond lasers. Opt. Express 2015, 23, 14057–14069. [Google Scholar] [CrossRef] [PubMed]
- Wu, G.; Zhou, Q.; Shen, L.; Ni, K.; Zeng, X.; Li, Y. Experimental optimization of the repetition rate difference in dual-comb ranging system. Appl. Phys. Express 2014, 7, 106602. [Google Scholar] [CrossRef]
- Shi, H.; Song, Y.; Li, T.; Wang, C.; Zhao, X.; Zheng, Z.; Hu, M. Timing jitter of the dual-comb mode-locked laser: A quantum origin and the ultimate effect on high-speed time- and frequency-domain metrology. IEEE J. Sel. Top. Quantum Electron. 2018, 24, 1–10. [Google Scholar] [CrossRef]
- Kim, J.; Song, Y. Ultralow-noise mode-locked fiber lasers and frequency combs: Principles, status, and applications. Adv. Opt. Photonics 2016, 8, 465–540. [Google Scholar] [CrossRef]
- Broomhead, D.S.; King, G.P. Extracting qualitative dynamics from experimental data. Phys. D Nonlinear Phenom. 1986, 20, 217–236. [Google Scholar] [CrossRef]
- Vautard, R.; Ghil, M. Singular spectrum analysis in nonlinear dynamics, with applications to paleoclimatic time series. Phys. D Nonlinear Phenom. 1989, 35, 395–424. [Google Scholar] [CrossRef]
- Zabalza, J.; Ren, J.; Wang, Z.; Zhao, H.; Wang, J.; Marshall, S. Fast implementation of singular spectrum analysis for effective feature extraction in hyperspectral imaging. IEEE J Sel. Top. Appl. Remote Sci. 2015, 8, 2845–2853. [Google Scholar] [CrossRef]
- Rafert, J.B.; Zabalza, J.; Marshall, S.; Ren, J. Singular spectrum analysis: A note on data processing for fourier transform hyperspectral imagers. Appl. Spectrosc. 2016, 70, 1582–1588. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; van Dam, T.; Sneeuw, N.; Collilieux, X.; Weigelt, M.; Rebischung, P. Singular spectrum analysis for modeling seasonal signals from gps time series. J. Geodyn. 2013, 72, 25–35. [Google Scholar] [CrossRef]
- Cao, H.; Song, Y.; Yu, J.; Shi, H.; Hu, M.; Wang, Q. Singular spectrum analysis for precision improvement in dual-comb laser ranging. Acta Phys. Sin. 2018, 67, 10601. [Google Scholar] [CrossRef]
- Hurst, H.E. Long-term storage capacity of reservoirs. Trans. Am. Soc. Civ. Eng. 1951, 116, 770–808. [Google Scholar]
- Montillet, J.P.; Tregoning, P.; McClusky, S.; Yu, K. Extracting white noise statistics in gps coordinate time series. IEEE Geosci. Remote Sens. Lett. 2013, 10, 563–567. [Google Scholar] [CrossRef]
- Hassani, H.; Zhigljavsky, A. Singular spectrum analysis: Methodology and application to economics data. J. Syst. Sci. Complex 2009, 22, 372–394. [Google Scholar] [CrossRef]
- Tomsett, A.C.; Toumi, R. Annual persistence in observed and modelled uk precipitation. Geophys. Res. Lett. 2001, 28, 3891–3894. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | i | ii | iii |
|---|---|---|---|
| Velocity (mm·s) | 0 | 0 (initial velocity) | 0.5 |
| Acceleration (mm·s) | 0 | 2 | 0 |
| Duration (s) | 0.374 | 0.25 | 0.871 |
| State | i | ii | iii | iv | v | vi |
|---|---|---|---|---|---|---|
| Velocity (mm·s) | 0 | 0.34 | 0 | 0.75 | −0.5 | 0 |
| Duration (s) | 5.1 | 2.3 | 1.2 | 2.37 | 0.47 | 0.615 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, H.; Song, Y.; Li, Y.; Li, R.; Shi, H.; Yu, J.; Hu, M.; Wang, C. Reduction of Moving Target Time-of-Flight Measurement Uncertainty in Femtosecond Laser Ranging by Singular Spectrum Analysis Based Filtering. Appl. Sci. 2018, 8, 1625. https://doi.org/10.3390/app8091625
Cao H, Song Y, Li Y, Li R, Shi H, Yu J, Hu M, Wang C. Reduction of Moving Target Time-of-Flight Measurement Uncertainty in Femtosecond Laser Ranging by Singular Spectrum Analysis Based Filtering. Applied Sciences. 2018; 8(9):1625. https://doi.org/10.3390/app8091625
Chicago/Turabian StyleCao, Hui, Youjian Song, Yuepeng Li, Runmin Li, Haosen Shi, Jiahe Yu, Minglie Hu, and Chingyue Wang. 2018. "Reduction of Moving Target Time-of-Flight Measurement Uncertainty in Femtosecond Laser Ranging by Singular Spectrum Analysis Based Filtering" Applied Sciences 8, no. 9: 1625. https://doi.org/10.3390/app8091625