The Method of Multi-Camera Layout in Motion Capture System for Diverse Small Animals


 ,
, 

Abstract
:1. Introduction
2. The Parameters of Multi-Camera System
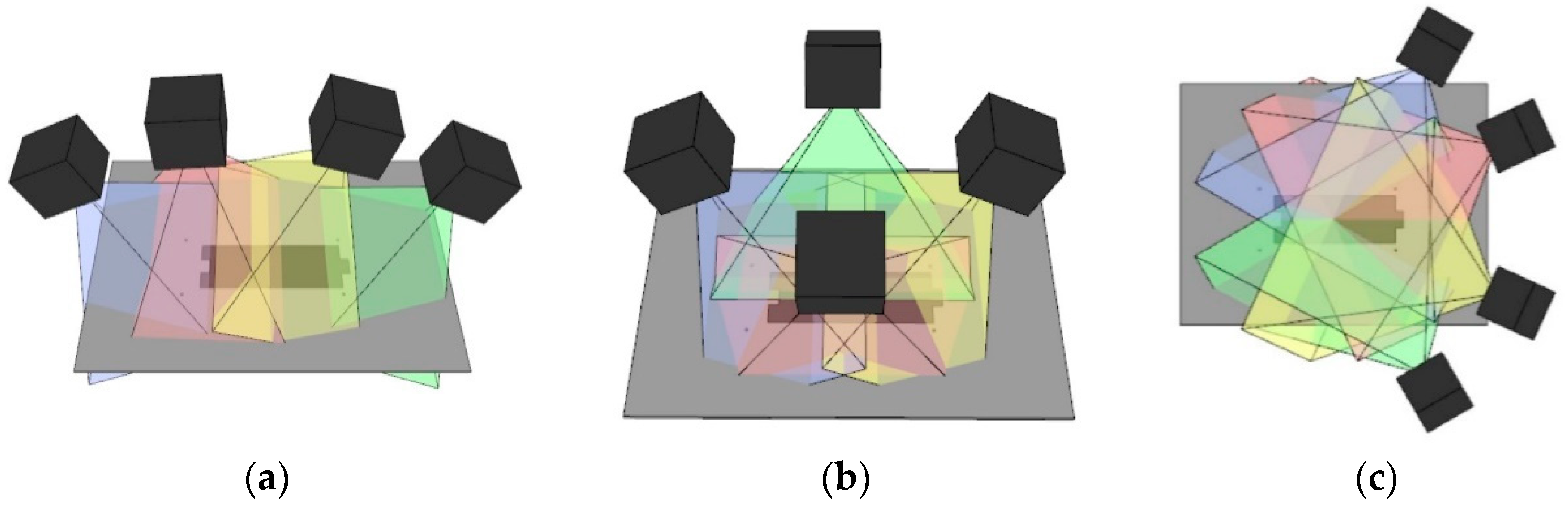
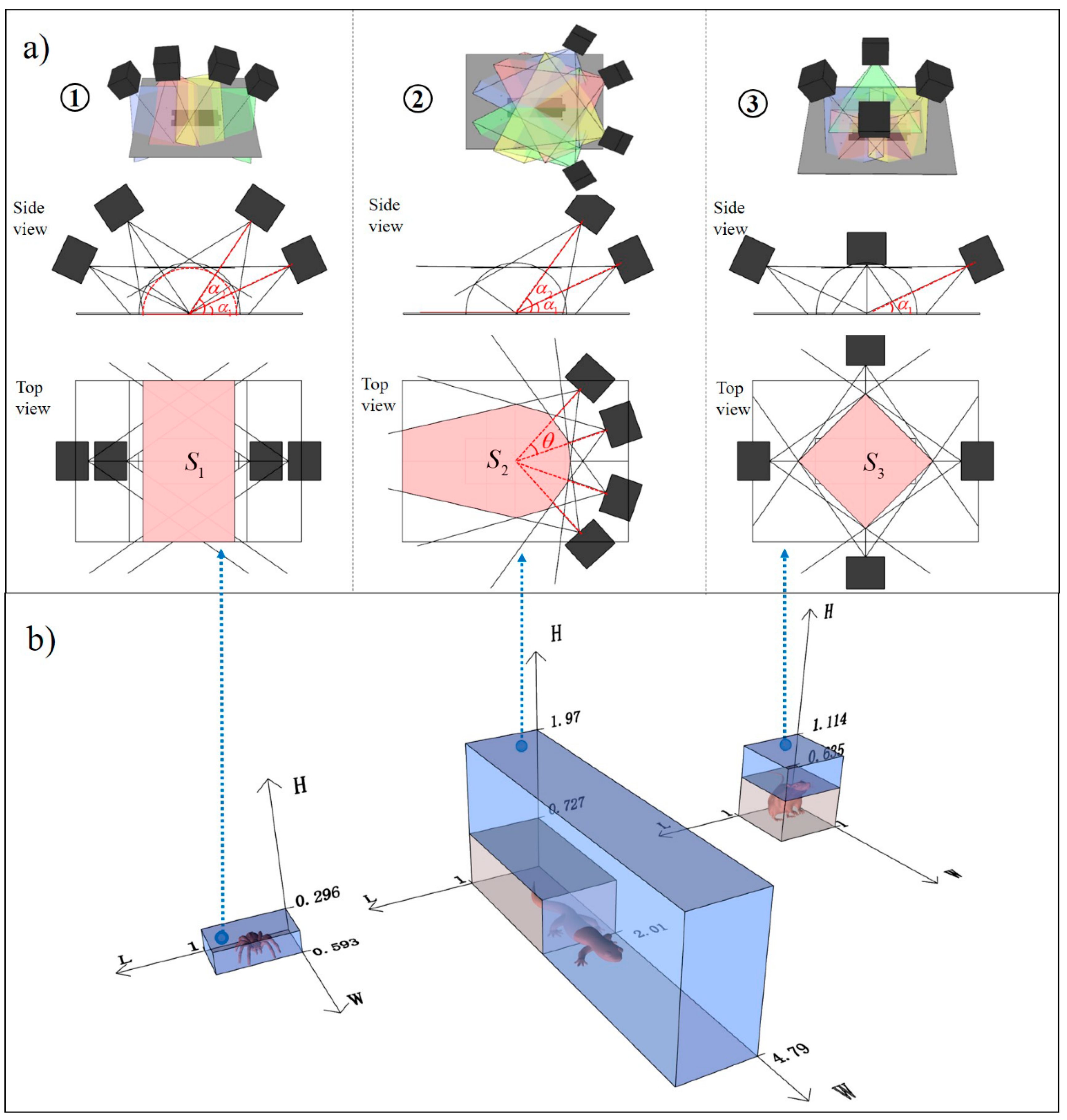
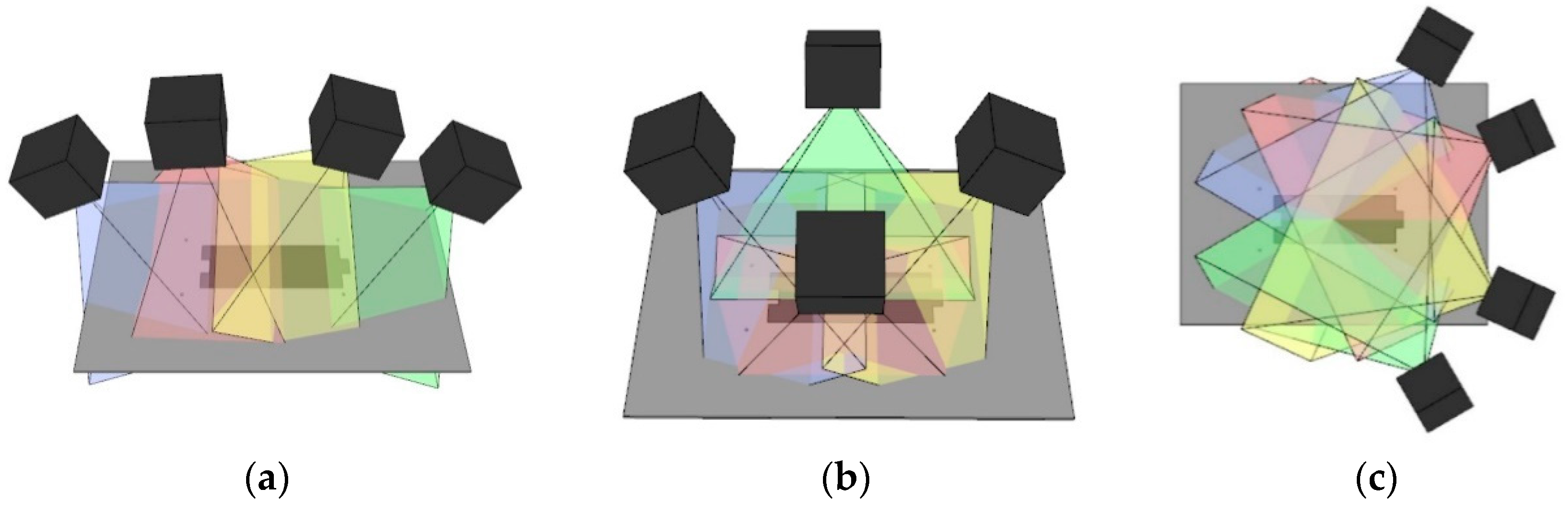
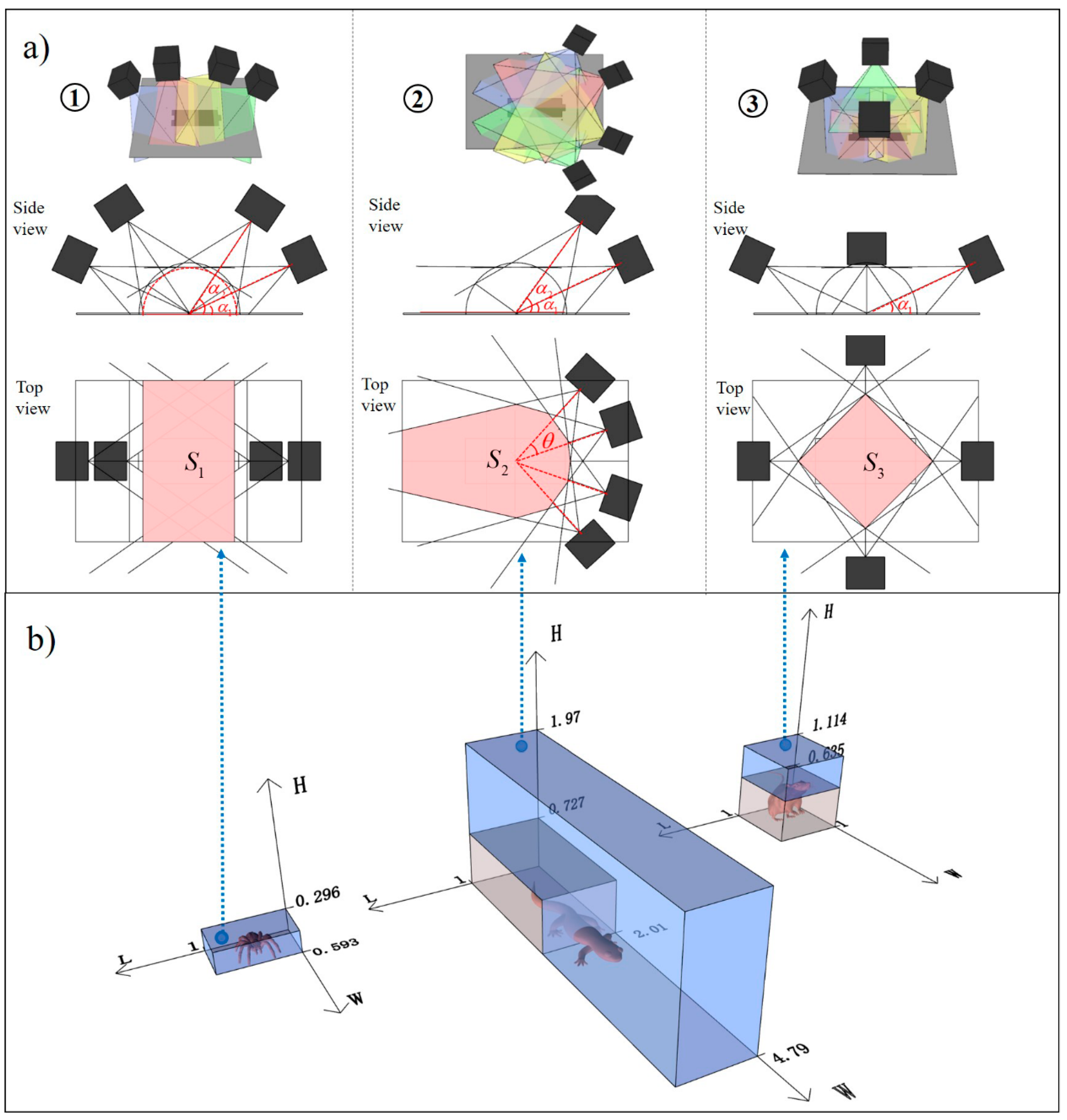
2.1. The Intersecting Volume of Multi-Camera System
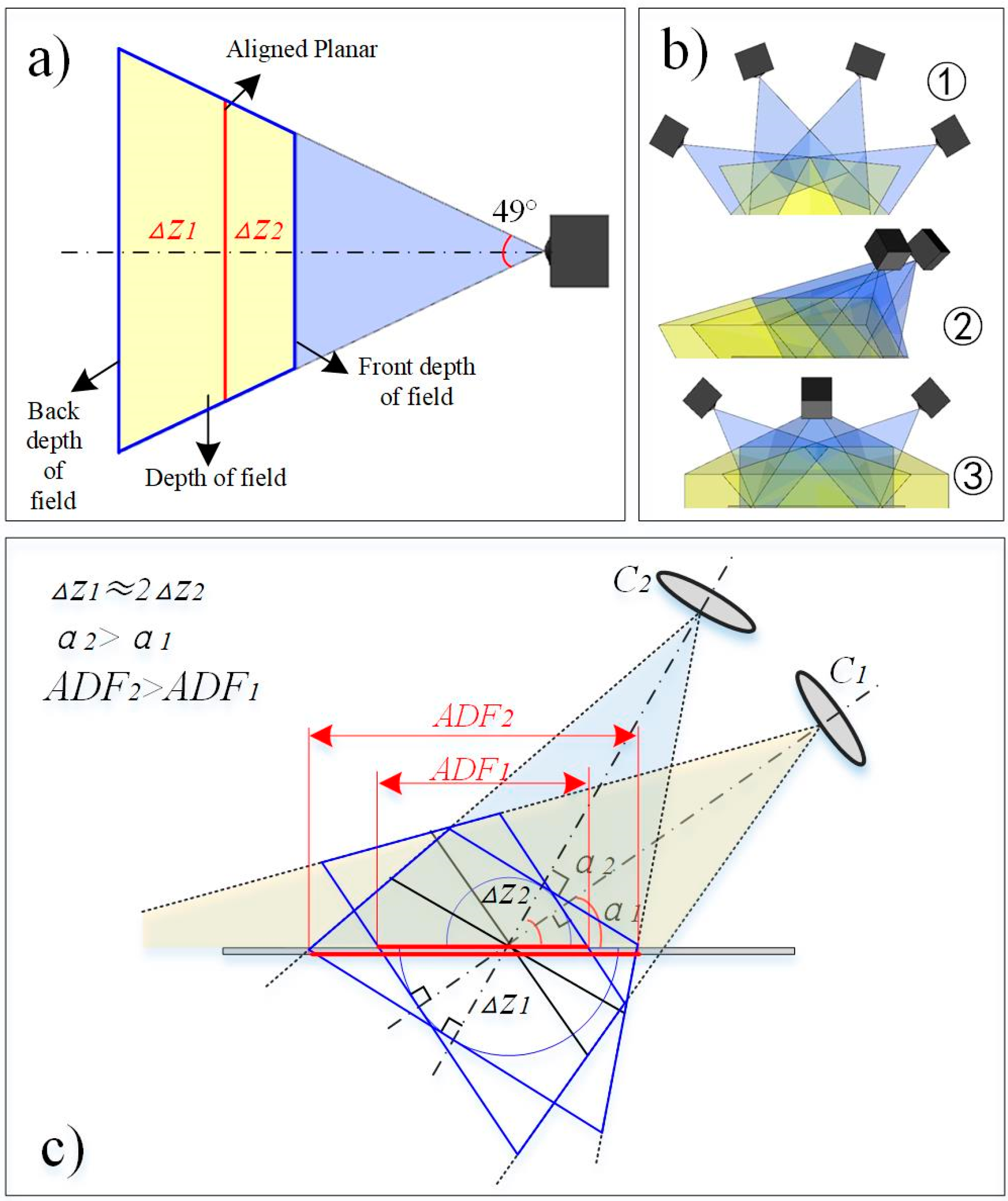
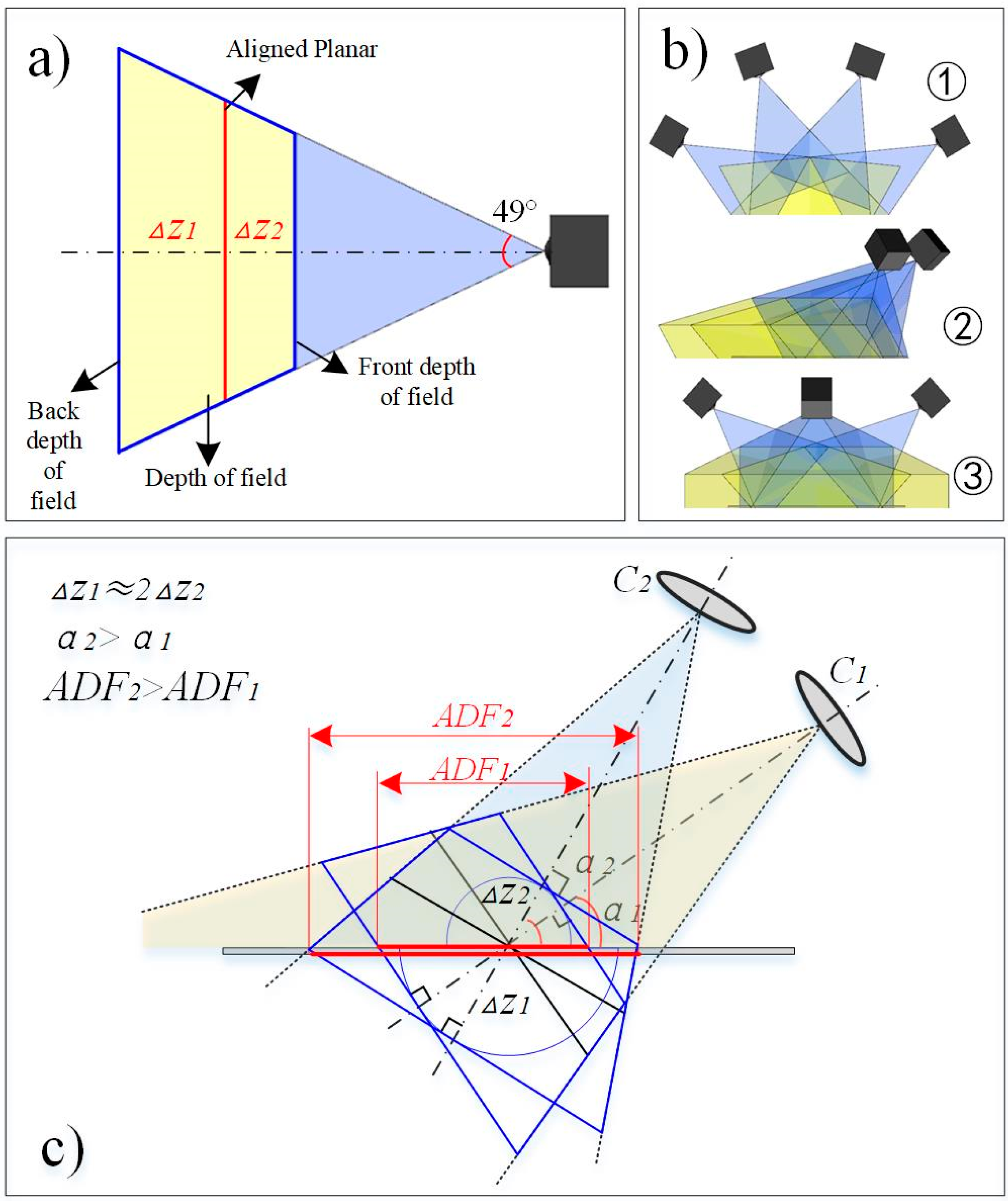
2.2. The Depth of Field of Multi-Camera
3. Experimental Verification
3.1. Materials and Methods
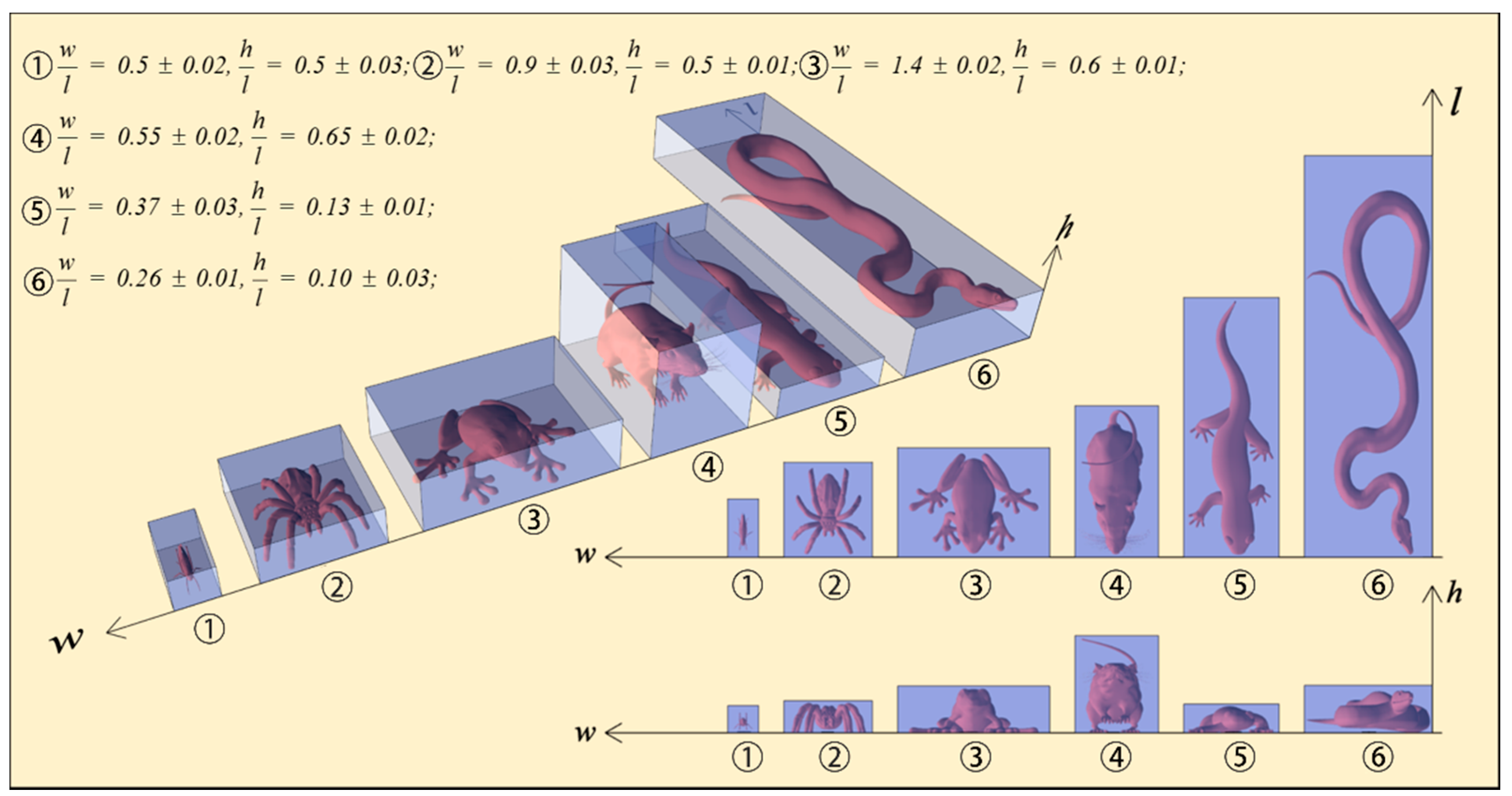
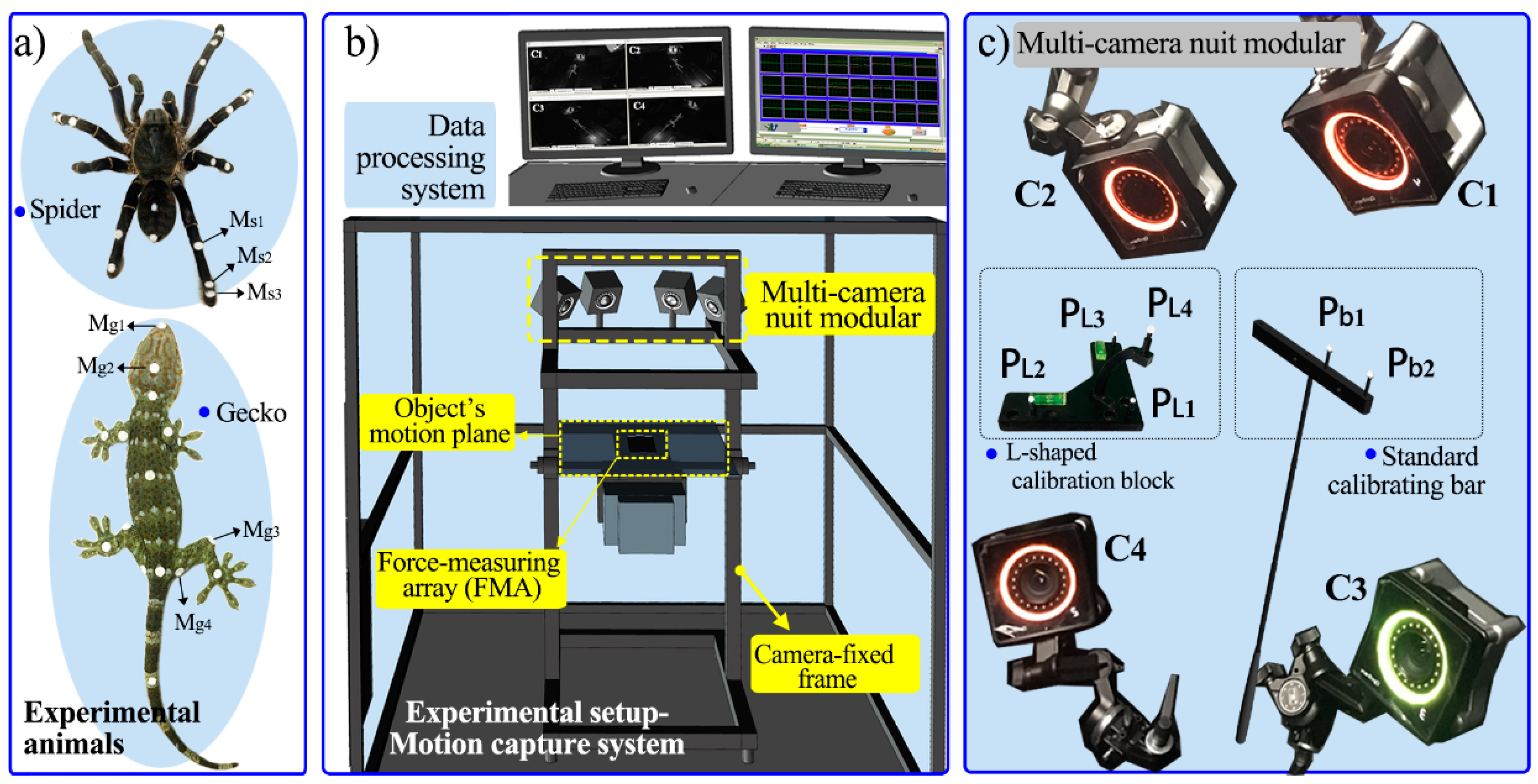
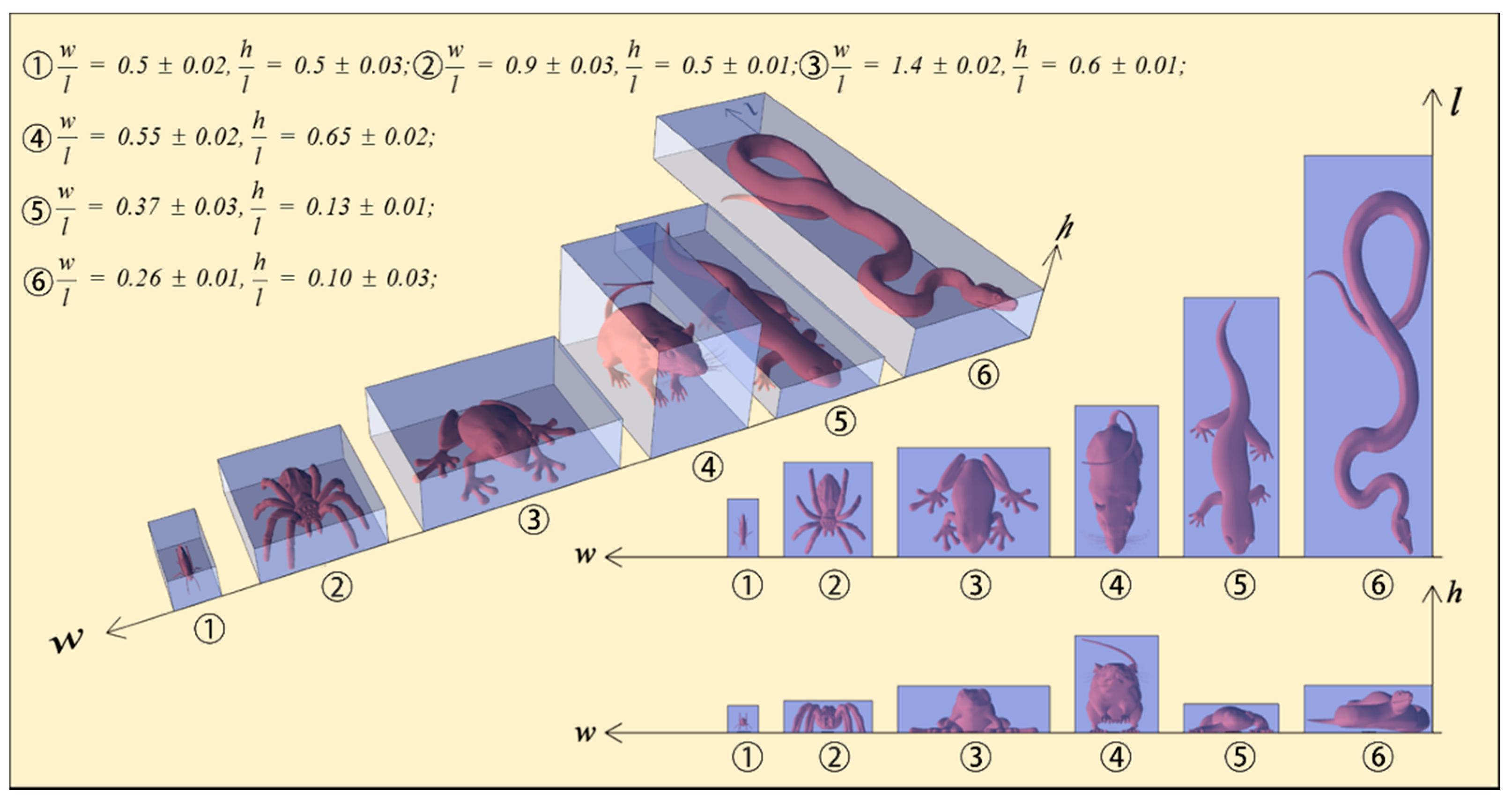
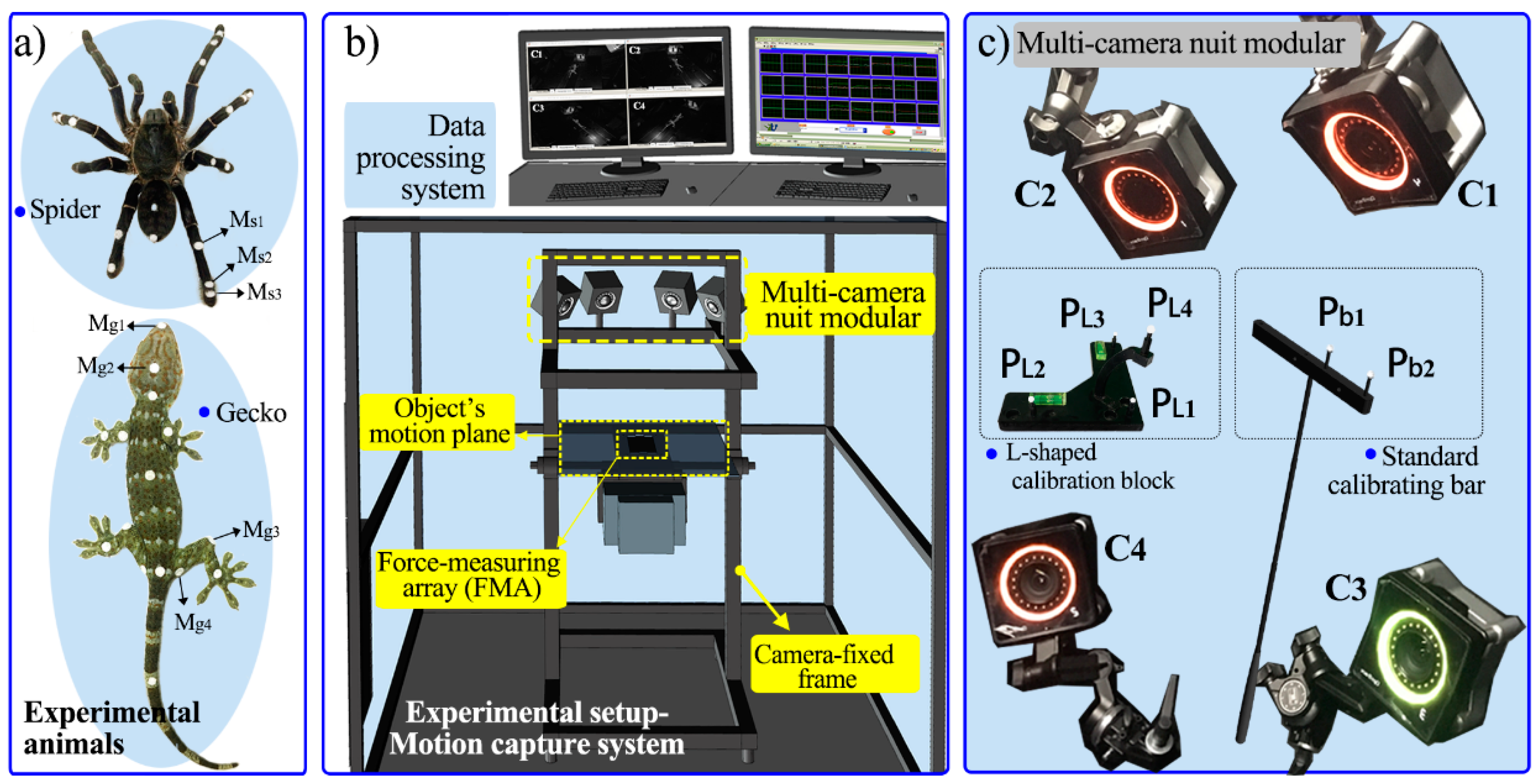
3.1.1. Experimental Animals
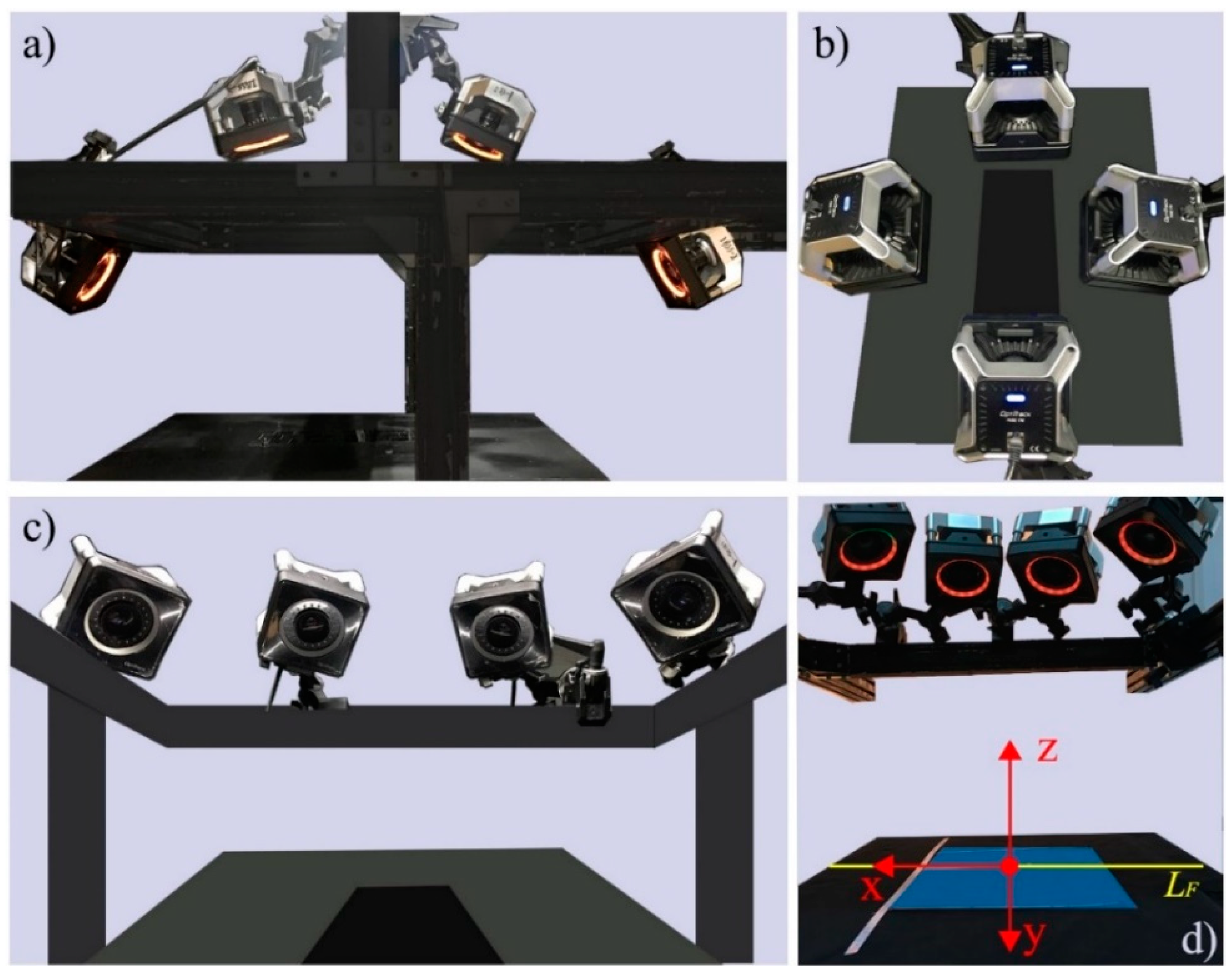
3.1.2. Experimental Equipment and Procedure
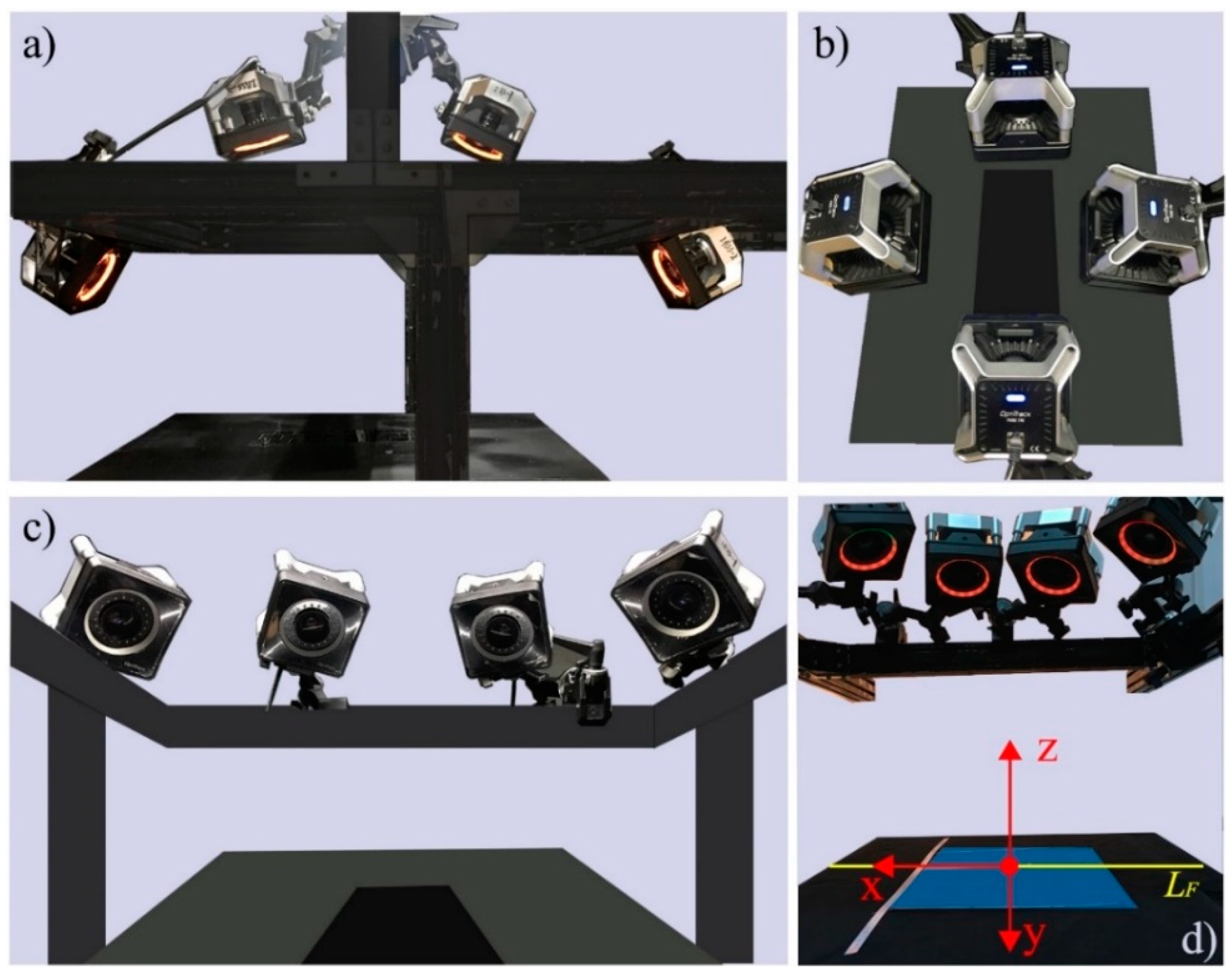
3.1.3. The Calibration Experiments of the Multi-Camera Layout Patterns
3.1.4. Experiments of Animals’ Motion Capture
3.1.5. Data Filtering
3.1.6. Statistics
3.2. Experimental Results
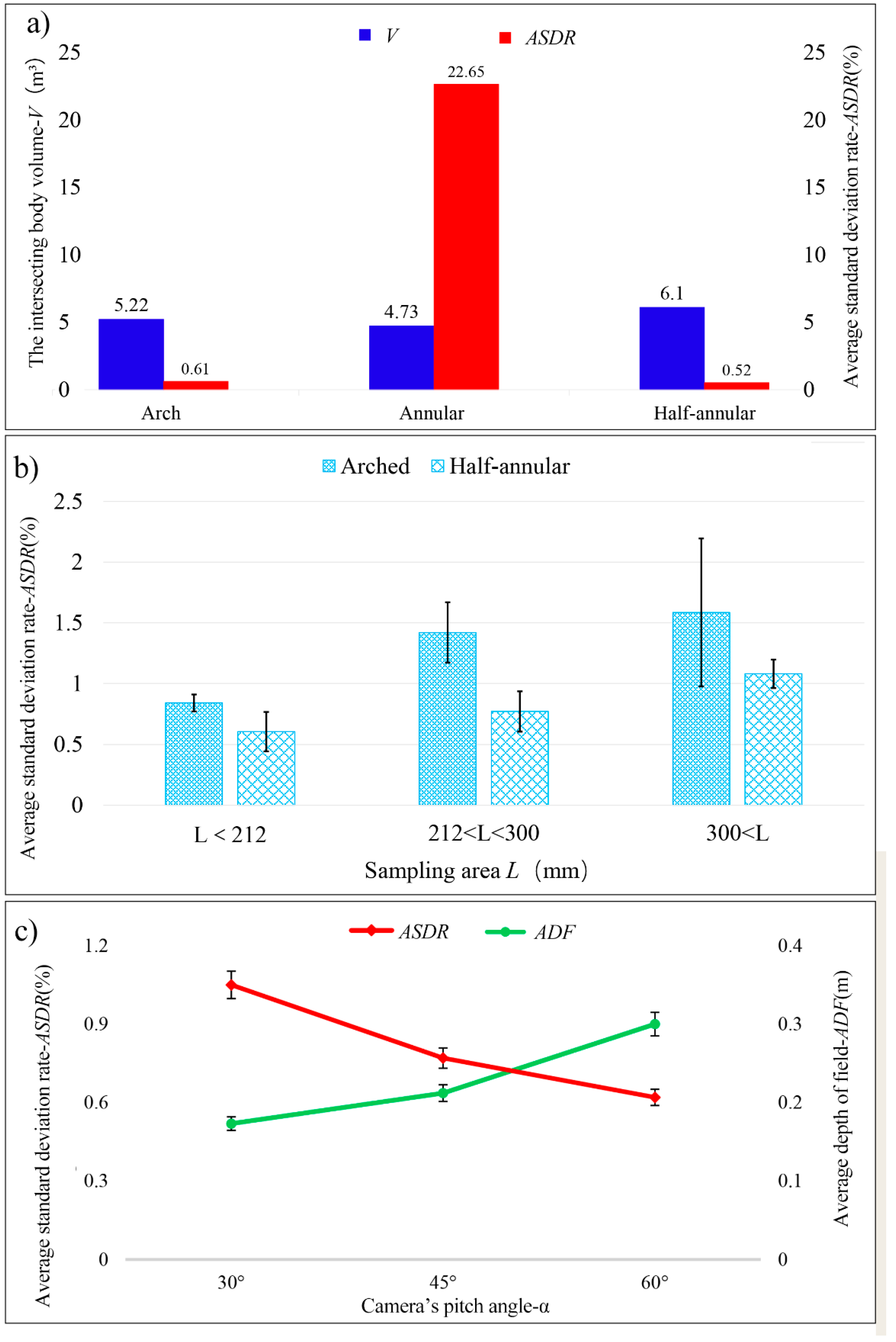
3.2.1. Intersection Volume and Standard Deviation Rate for Different Layout Patterns
3.2.2. The Precision for Different Layout Patterns under Different Depth of Field
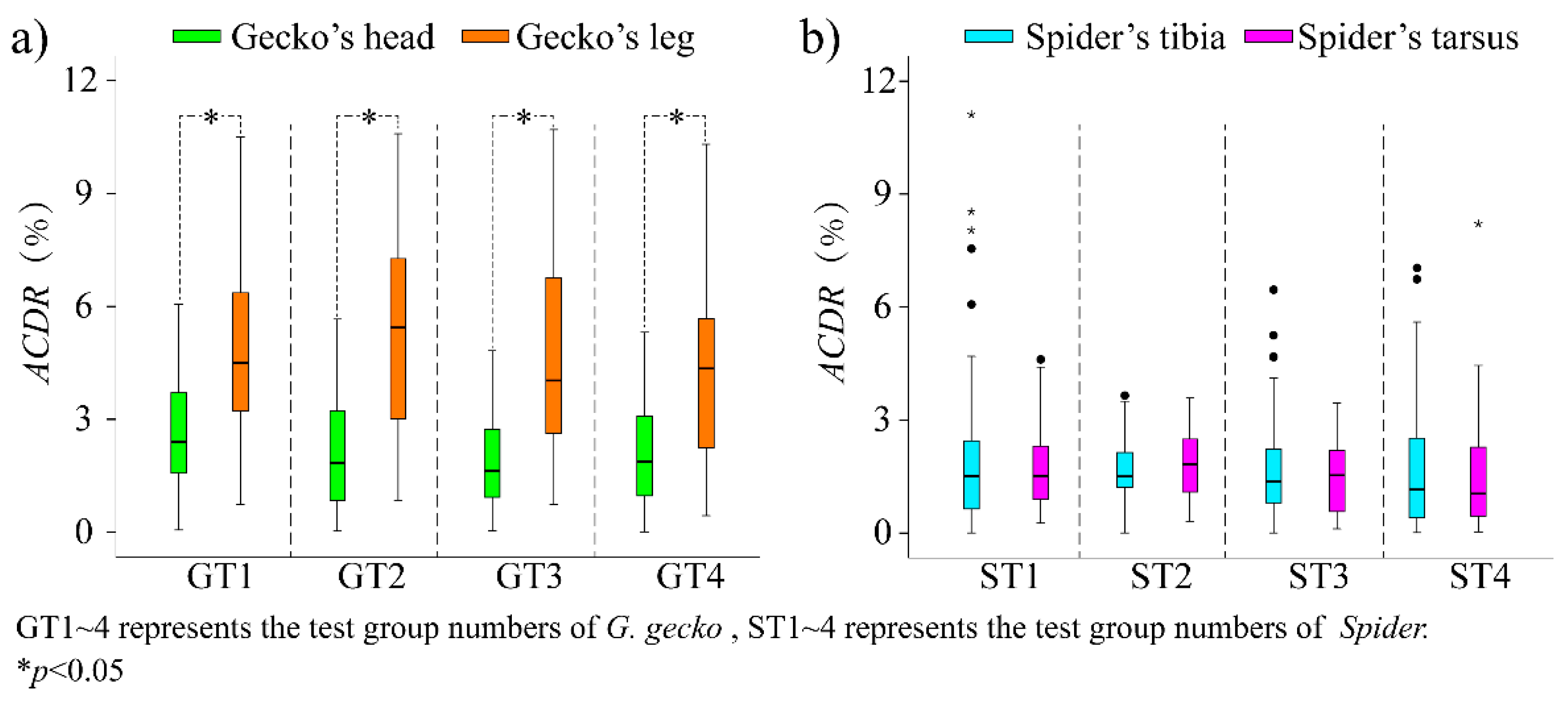
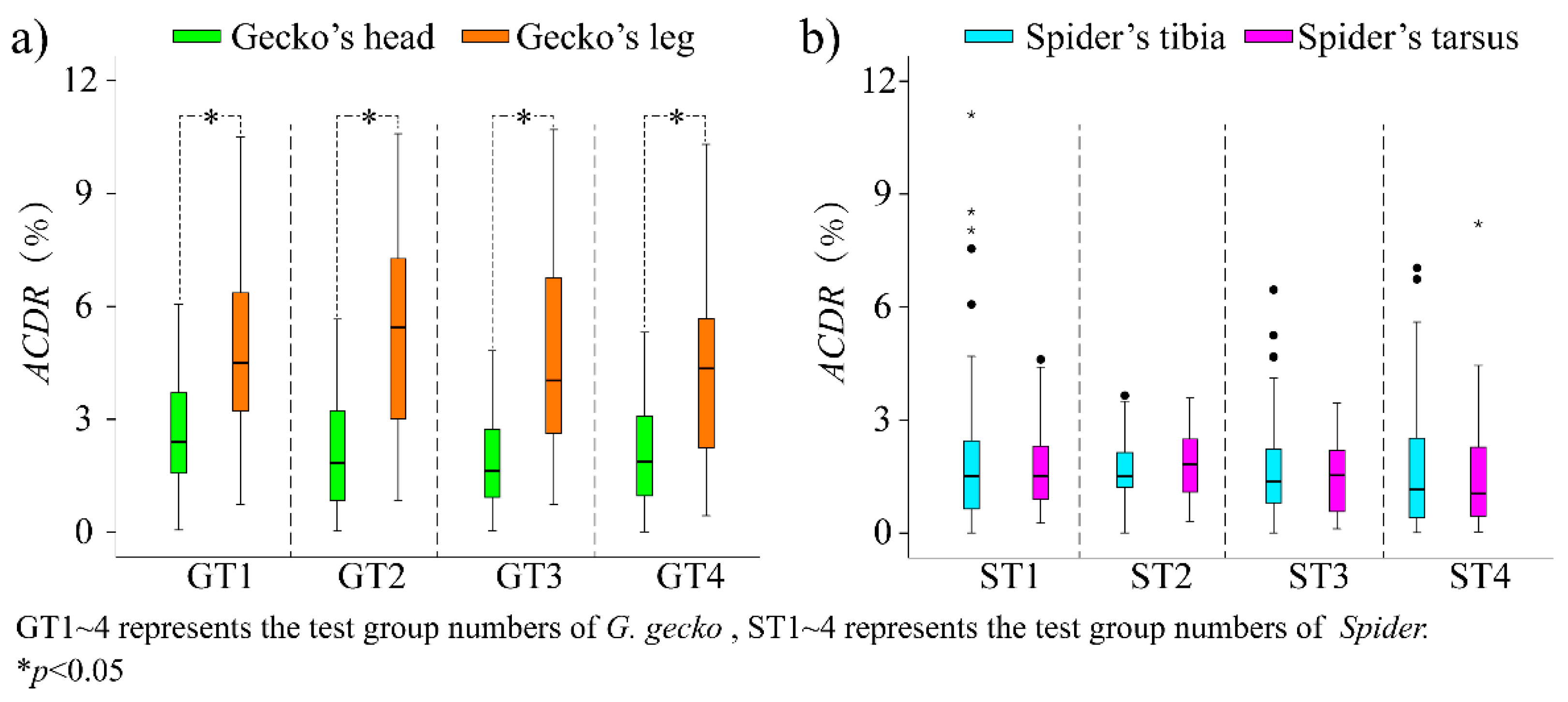
3.2.3. The Accuracy of Small Animals in Half-Annular Layout
4. Discussion
4.1. The Effect of Intersecting Volume and Depth of Field on the Motion Capture
4.2. The Performances of the Motion Capture System for Different Objects
4.3. Scalability of Multi-Camera System
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Symbol | Value | Unit | Interpretation |
|---|---|---|---|---|
| Camera numbers | N | 4 | Station | In this study N = 4 |
| Working distance/focus distance | WD | / | mm | Distance between the lens and the focus on the experimental platform |
| Camera’s pitch angle | α | / | Degree | The angle between camera and capture platform in a side view |
| The angle between cameras | θ | / | Degree | The angle between two cameras |
| The length of working field | L | / | mm | Length of the area able to capture on the experimental platform |
| Working field’s width | W | / | mm | Width of capture able area on experimental platform |
| Camera focal length | f | 6 | mm | Intrinsic camera parameters |
| CCD width | v | 8.8 | mm | The height of the CCD chip |
| CCD height | h | 6.6 | mm | The width of the CCD chip |
| Depth of field Back depth of field, Front depth of field | ΔZ ΔZ1, ΔZ2 | / | mm | There is an allowable circle of confusion before and after the focus. The distance between these two circles of confusion is called the depth of field. That is, before and after the subject (focal point), the image still has a clear range, that is, the depth of field. |
| Camera aperture | F | 1.6 | mm | |
| Circle of confusion | δ | / | mm | Before and after the focus, the light begins to gather and spread and the image of the point becomes blurred, forming an enlarged circle. |
| Calibrating markers’ distance | d | 43.4 | mm | The distance of two markers on the calibrating bar. |
| The standard deviation rate | SDR | / | % | Standard deviation as a percentage of the mean value. |
| The average standard deviation rate | ASDR | / | % | The mean value of all the SDR resulting from multiple experiments as a quantitative form reflecting the discreteness of the data captured during the capture process. |
| The capture deviation rate | CDR | / | % | The deviation value as a percentage of the true value. |
| The average capture deviation rate | ACDR | / | % | The mean value of all the CDR resulting from multiple experiments as a reflection of the degree of dispersion between the measured value and the actual value. |
References
- Hutchinson, J.R.; Schwerda, D.; Famini, D.J.; Dale, R.H.; Fischer, M.S.; Kram, R. The locomotor kinematics of Asian and African elephants: Changes with speed and size. J. Exp. Biol. 2006, 209, 3812–3827. [Google Scholar] [CrossRef] [PubMed]
- Xiang, Z.R.; Zhi, J.Y.; Xu, B.-C.; Li, J. Survey on motion capture technique and its applications. Appl. Res. Comput. 2013, 30, 2241–2245. [Google Scholar]
- Huang, B. Sequence Frame-based Optical Motion Capture System and Its Realization. Comput. Eng. Appl. 2004, 40, 36–39. [Google Scholar]
- Erdem, U.M.; Sclaroff, S. Automated camera layout to satisfy task-specific and floor plan-specific coverage requirements. Comput. Vis. Image Underst. 2004, 103, 156–169. [Google Scholar] [CrossRef]
- Xu, G.; Tian, G.; Pan, H.; Su, J.; Li, X. Precision Evaluation of Three-dimensional Feature Points Measurement by Binocular Vision. J. Opt. Soc. Korea 2011, 15, 30–37. [Google Scholar] [CrossRef] [Green Version]
- Katz, S.L.; Syme, D.A.; Shadwick, R.E. High-speed swimming: Enhanced power in yellowfin tuna. Nature 2001, 410, 770–771. [Google Scholar] [CrossRef] [PubMed]
- Webb, P.W. Form and Function in Fish Swimming. Sci. Am. 1984, 251, 72–82. [Google Scholar] [CrossRef]
- Donley, J.M.; Sepulveda, C.A.; Konstantinidis, P.; Gemballa, S.; Shadwick, R.E. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature 2004, 429, 61–65. [Google Scholar] [CrossRef] [PubMed]
- Ren, L.; Hutchinson, J.; Schwerda, D.; Fischer, M. Basic limb kinematics of the locomotion in African elephants (Loxodonta africana). Comp. Biochem. Physiol. Part A Mol. Integr. Physiol. 2006, 143, S89. [Google Scholar]
- Muybridge, E. Horses and Other Animals in Motion: 45 Classic Photographic Sequences; Dover Publications: Mineola, NY, USA, 1985. [Google Scholar]
- Nauwelaerts, S.; Clayton, H.M. Trunk deformation in the trotting horse. Equine Vet. J. 2009, 41, 203–206. [Google Scholar] [CrossRef] [PubMed]
- Dickinson, M.H.; Farley, C.T.; Full, R.J.; Koehl, M.A.R.; Kram, R.; Lehman, S. How animals move: An integrative view. Science 2000, 288, 100–106. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Wang, Z.; Dai, Z.; Gorb, S.N. Bio-Inspired Adhesive Footpad for Legged Robot Climbing under Reduced Gravity: Multiple Toes Facilitate Stable Attachment. Appl. Sci. 2018, 8, 114. [Google Scholar] [CrossRef]
- Deetjen, M.E.; Biewener, A.A.; Lentink, D. High-speed surface reconstruction of a flying bird using structured-light. J. Exp. Biol. 2017, 220, 1956–1961. [Google Scholar] [CrossRef] [PubMed]
- Zheng, L.; Hedrick, T.L.; Mittal, R. A multi-fidelity modelling approach for evaluation and optimization of wing stroke aerodynamics in flapping flight. J. Fluid Mech. 2013, 721, 118–154. [Google Scholar] [CrossRef]
- Miller, L.A. Biomechanics: The aerodynamics buzz from mosquitoes. Nature 2017, 544, 40–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bomphrey, R.J.; Nakata, T.; Phillips, N.; Walker, S.M. Smart wing rotation and trailing-edge vortices enable high frequency mosquito flight. Nature 2017, 544, 92–95. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- David, J.S. A Brief History of Motion Capture for Computer Character Animation. In Proceedings of the ACM SIGGRAPH Computer Graphics, Course 9, Orlando, FL, USA, 24–29 July 1994. [Google Scholar]
- Mittal, A.; Davis, L.S. Visibility Analysis and Sensor Planning in Dynamic Environments. In Proceedings of the Computer Vision—ECCV 2004, European Conference on Computer Vision, Prague, Czech Republic, 11–14 May 2004; pp. 175–189. [Google Scholar]
- Wang, Z.; Dai, Z.; Ji, A.; Ren, L.; Xing, Q.; Dai, L. Biomechanics of gecko locomotion: The patterns of reaction forces on inverted, vertical and horizontal substrates. Bioinspir. Biomim. 2015, 10, 16019. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Dai, Z.; Li, W.; Ji, A.; Wang, W. How do the substrate reaction forces acting on a gecko’s limbs respond to inclines? Naturwissenschaften 2015, 102, 7. [Google Scholar] [CrossRef] [PubMed]
- Autumn, K.; Liang, Y.A.; Hsieh, S.T.; Zesch, W.; Chan, W.P.; Kenny, T.W.; Fearing, R.; Full, R.J. Adhesive force of a single gecko foot-hair. Nature 2000, 405, 681–685. [Google Scholar] [CrossRef] [PubMed]
- Endlein, T.; Ji, A.; Samuel, D.; Yao, N.; Wang, Z.; Barnes, W.J.P.; Federle, W.; Kappl, M.; Dai, Z. Sticking like sticky tape: Tree frogs use friction forces to enhance attachment on overhanging surfaces. J. R. Soc. Interface 2013, 10. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Ji, A.; Endlein, T.; Samuel, D.; Yao, N.; Wang, Z.; Dai, Z. The role of fore- and hindlimbs during jumping in the Dybowski’s frog (Rana dybowskii). J. Exp. Zool. A Ecol. Genet. Physiol. 2014, 321, 324–333. [Google Scholar] [CrossRef] [PubMed]
- Endlein, T.; Ji, A.; Yuan, S.; Hill, I.; Wang, H.; Barnes, W.J.; Dai, Z.; Sitti, M. The use of clamping grips and friction pads by tree frogs for climbing curved surfaces. Proc. Biol. Sci. 2017, 284. [Google Scholar] [CrossRef] [PubMed]
- Biancardi, C.M.; Fabrica, C.G.; Polero, P.; Loss, J.F.; Minetti, A.E. Biomechanics of octopedal locomotion: Kinematic and kinetic analysis of the spider Grammostola mollicoma. J. Exp. Biol. 2011, 214, 3433–3442. [Google Scholar] [CrossRef] [PubMed]
- Han, L.; Wang, Z.; Ji, A.; Dai, Z. Grip and detachment of locusts on inverted sandpaper substrates. Bioinspir. Biomim. 2011, 6, 46005. [Google Scholar] [CrossRef] [PubMed]
- Webb, A.A.; Kerr, B.; Neville, T.; Ngan, S.; Assem, H. Kinematics and Ground Reaction Force Determination: A Demonstration Quantifying Locomotor Abilities of Young Adult, Middle-aged, and Geriatric Rats. J. Vis. Exp. JoVE 2011, e2138. [Google Scholar] [CrossRef] [PubMed]
- Dai, Z.; Wang, Z.; Ji, A. Dynamics of gecko locomotion: A force-measuring array to measure 3D reaction forces. J. Exp. Biol. 2011, 214, 703–708. [Google Scholar] [CrossRef] [PubMed]
- Menache, A. Understanding Motion Capture for Computer Animation and Video Games; Morgan Kaufmann Publishers Inc.: Burlington, MA, USA, 1999. [Google Scholar]
- Kim, W.S.; Ansar, A.I.; Steele, R.D.; Steinke, R.C. Performance Analysis and Validation of a Stereo Vision System. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005; pp. 1409–1416. [Google Scholar]
- Hausler, G.; Maul, M. Triangulation with Expanded Range of Depth. Opt. Eng. 1985, 24, 246975. [Google Scholar] [CrossRef]
- Autumn, K.; Hsieh, S.T.; Dudek, D.M.; Chen, J.; Chitaphan, C.; Full, R.J. Dynamics of geckos running vertically. J. Exp. Biol. 2006, 209, 260–272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Svoboda, T.; Martinec, D.; Pajdla, T. A Convenient Multicamera Self-Calibration for Virtual Environments. Presence 2005, 14, 407–422. [Google Scholar] [CrossRef]
- Heikkila, J.; Silvén, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, Puerto Rico, USA, 17–19 June 1997; pp. 1106–1112. [Google Scholar] [Green Version]
- Windolf, M.; Götzen, N.; Morlock, M. Systematic accuracy and precision analysis of video motion capturing systems—Exemplified on the Vicon-460 system. J. Biomech. 2008, 41, 2776–2780. [Google Scholar] [CrossRef] [PubMed]
- Yuan, J.G.; Zhang, Y.N.; Zheng, J.B.; Run-Ping, X.I. Multi-Camera Layout Optimization Method for Motion Capture System. Microprocessors 2009, 3, 90–94. [Google Scholar]
- Boye, J.K.; Thomsen, M.H.; Pfau, T.; Olsen, E. Accuracy and precision of gait events derived from motion capture in horses during walk and trot. J. Biomech. 2014, 47, 1220–1224. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Miller, C.; Mulavara, A.; Bloomberg, J. A quasi-static method for determining the characteristics of a motion capture camera system in a “split-volume” configuration. Gait Posture 2002, 16, 283–287. [Google Scholar] [CrossRef] [Green Version]
- Carse, B.; Meadows, B.; Bowers, R.; Rowe, P. Affordable clinical gait analysis: An assessment of the marker tracking accuracy of a new low-cost optical 3D motion analysis system. Physiotherapy 2013, 99, 347–351. [Google Scholar] [CrossRef] [PubMed]
- Qin, H.U. Human Gait Tracking Method Based on Multiple Cameras. Comput. Eng. 2008, 34, 220–222. [Google Scholar]

| Camera Layout | Half-Annular | ||
|---|---|---|---|
| Pitch angle α (°) | 30° | 45° | 60° |
| Camera angle θ (°) | 30° | ||
| Working distance WD (mm) | 540.5 ± 22.5 | 606.75 ± 28.5 | 604.25 ± 30.5 |
| Intersecting volume V (m3) | 0.063 | 0.063 | 0.036 |
| Depth of field Z (mm) | 324 | 377 | 377 |
| Actual depth of field ADF (mm) | 346.4 | 533.16 | 754 |
| ACD (mm) | 0.008 ± 0.0012 | −0.12 ± 0.003 | −0.02 ± 0.004 |
| ASDR (%) | 0.61 ± 0.12 | 0.52 ± 0.08 | 0.82 ± 0.15 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zong, W.; Wang, Z.; Xing, Q.; Zhu, J.; Wang, L.; Qin, K.; Bai, H.; Yu, M.; Dai, Z. The Method of Multi-Camera Layout in Motion Capture System for Diverse Small Animals. Appl. Sci. 2018, 8, 1562. https://doi.org/10.3390/app8091562
Zong W, Wang Z, Xing Q, Zhu J, Wang L, Qin K, Bai H, Yu M, Dai Z. The Method of Multi-Camera Layout in Motion Capture System for Diverse Small Animals. Applied Sciences. 2018; 8(9):1562. https://doi.org/10.3390/app8091562
Chicago/Turabian StyleZong, Weijia, Zhouyi Wang, Qiang Xing, Junjie Zhu, Liuwei Wang, Kai Qin, Hemin Bai, Min Yu, and Zhendong Dai. 2018. "The Method of Multi-Camera Layout in Motion Capture System for Diverse Small Animals" Applied Sciences 8, no. 9: 1562. https://doi.org/10.3390/app8091562
APA StyleZong, W., Wang, Z., Xing, Q., Zhu, J., Wang, L., Qin, K., Bai, H., Yu, M., & Dai, Z. (2018). The Method of Multi-Camera Layout in Motion Capture System for Diverse Small Animals. Applied Sciences, 8(9), 1562. https://doi.org/10.3390/app8091562