A General Euler Angle Error Model of Strapdown Inertial Navigation Systems

Abstract
:Featured Application
Abstract

1. Introduction
2. The Proposed General Euler Angle Error Model
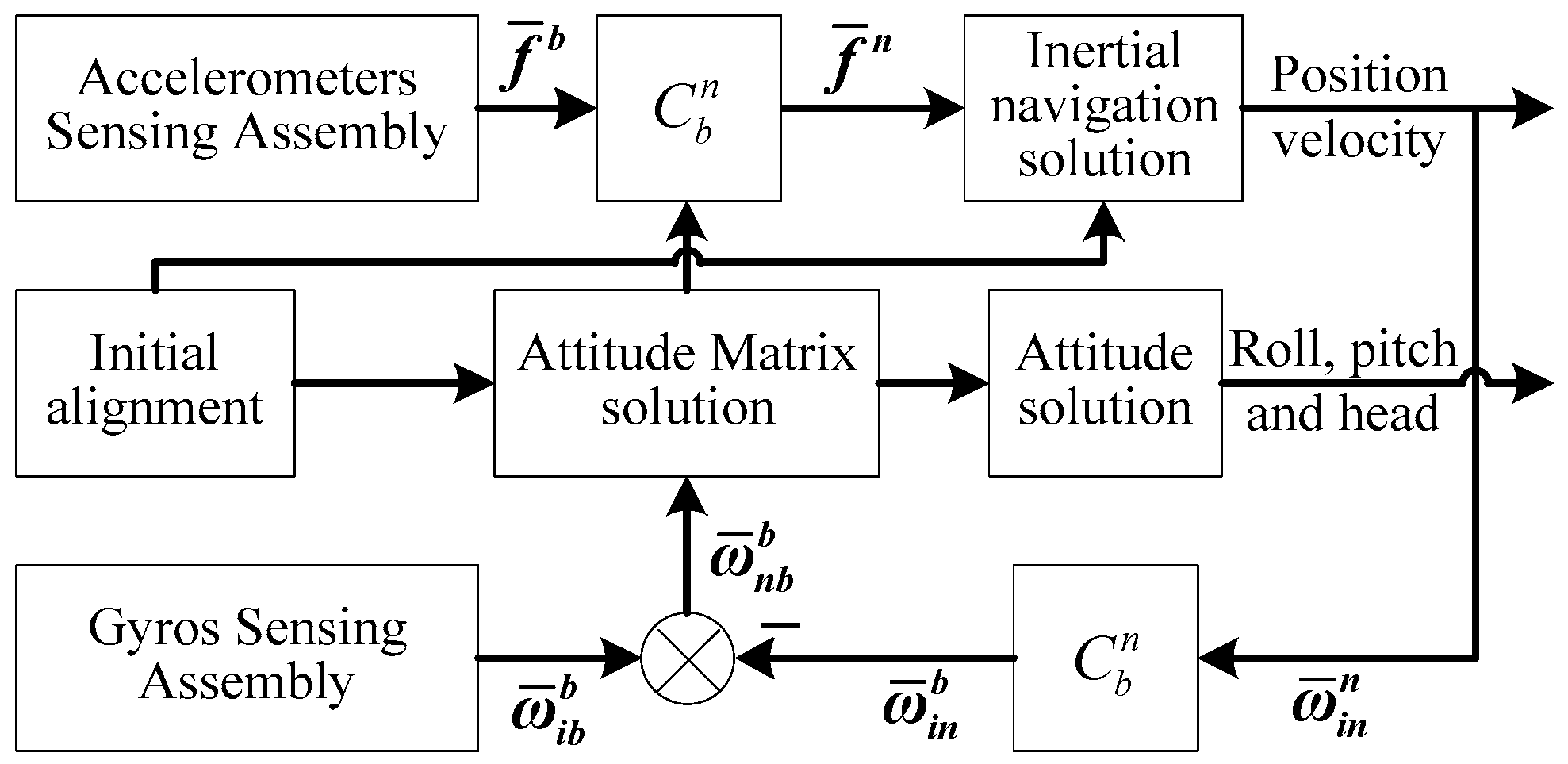
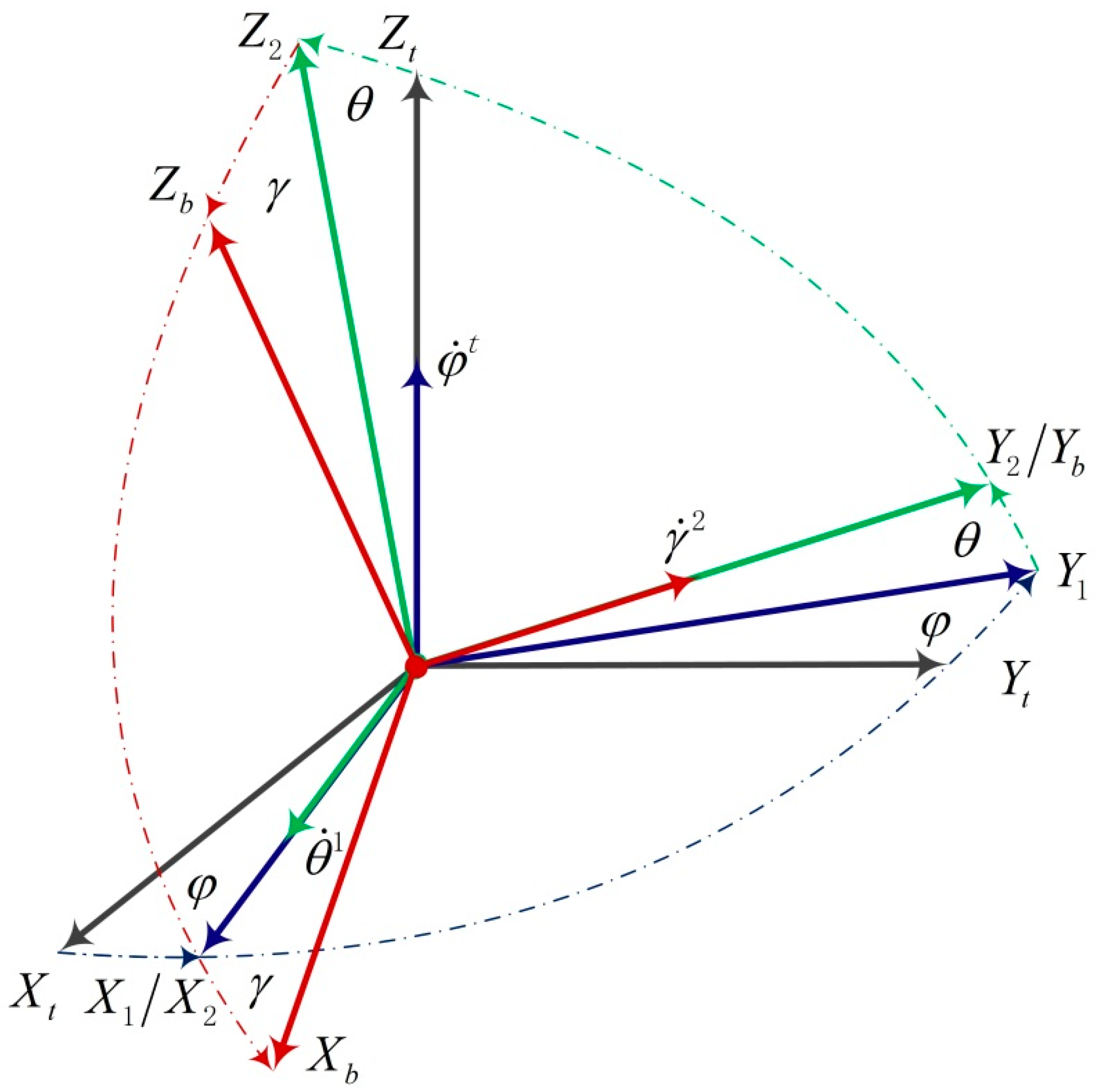
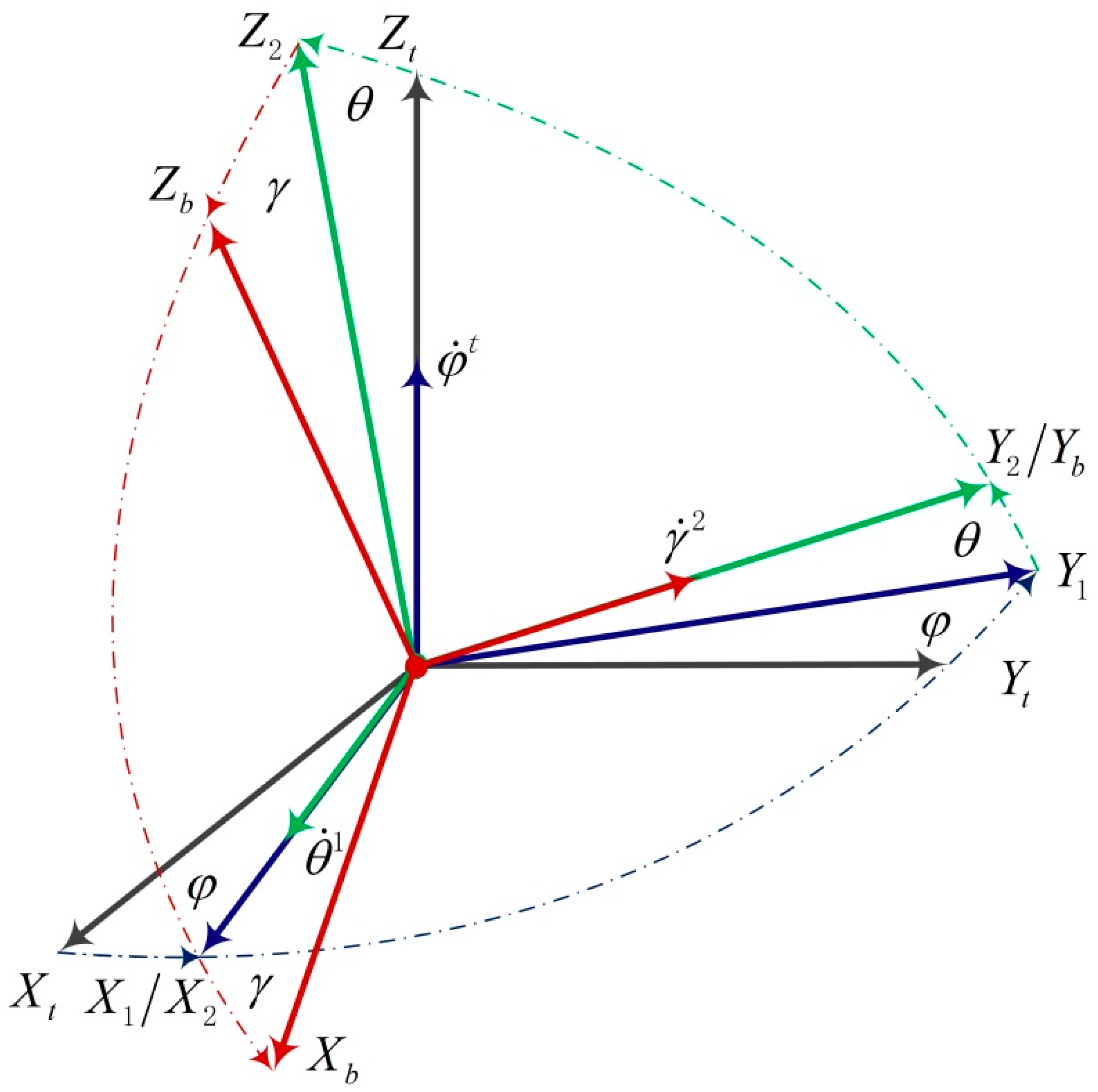
2.1. Attitude Solution by Euler Angle Differential Equations
2.2. Modeling of Relative Euler Angle Errors
2.3. Modeling of Convected Euler Angle Errors
3. Simulation Experiments
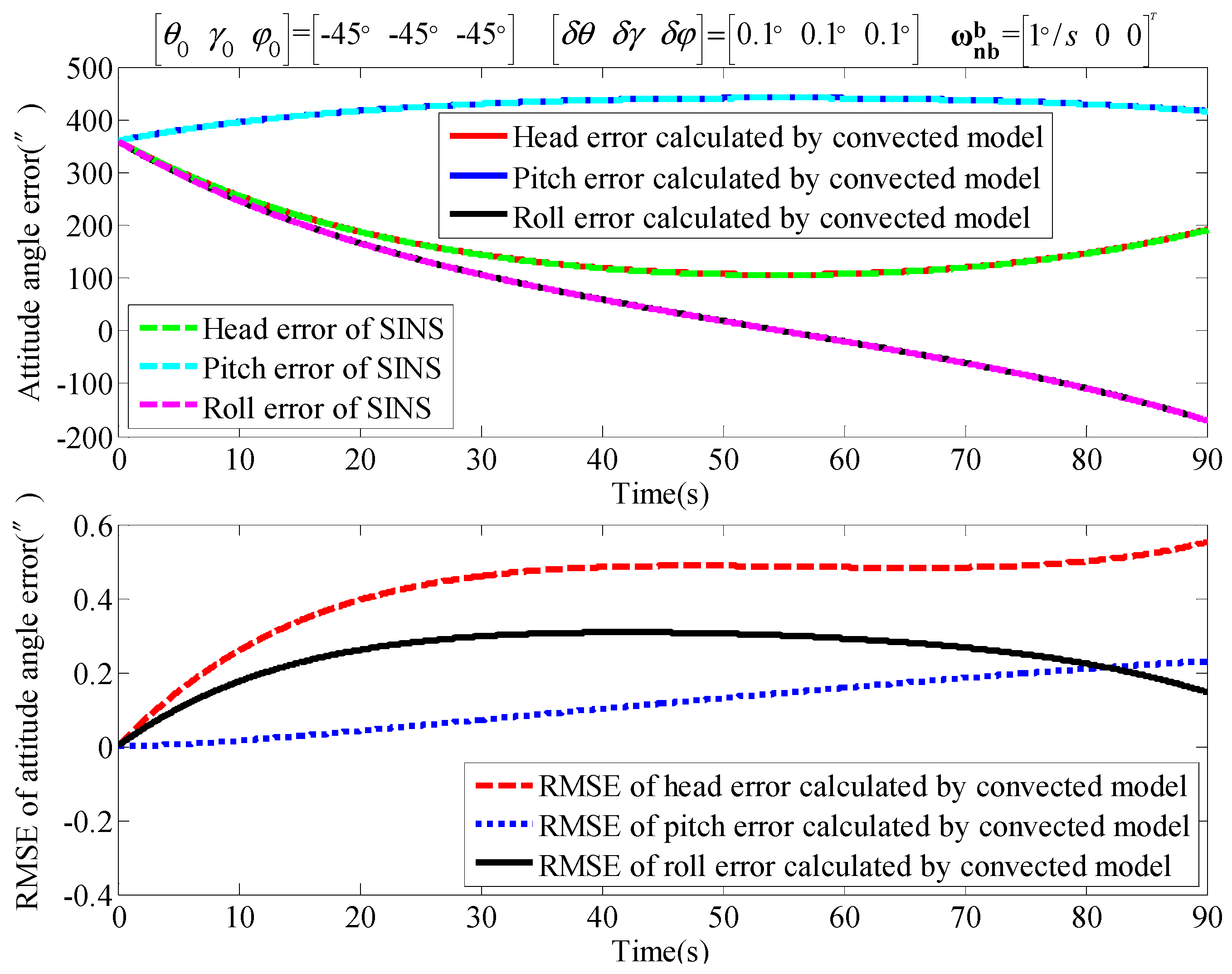
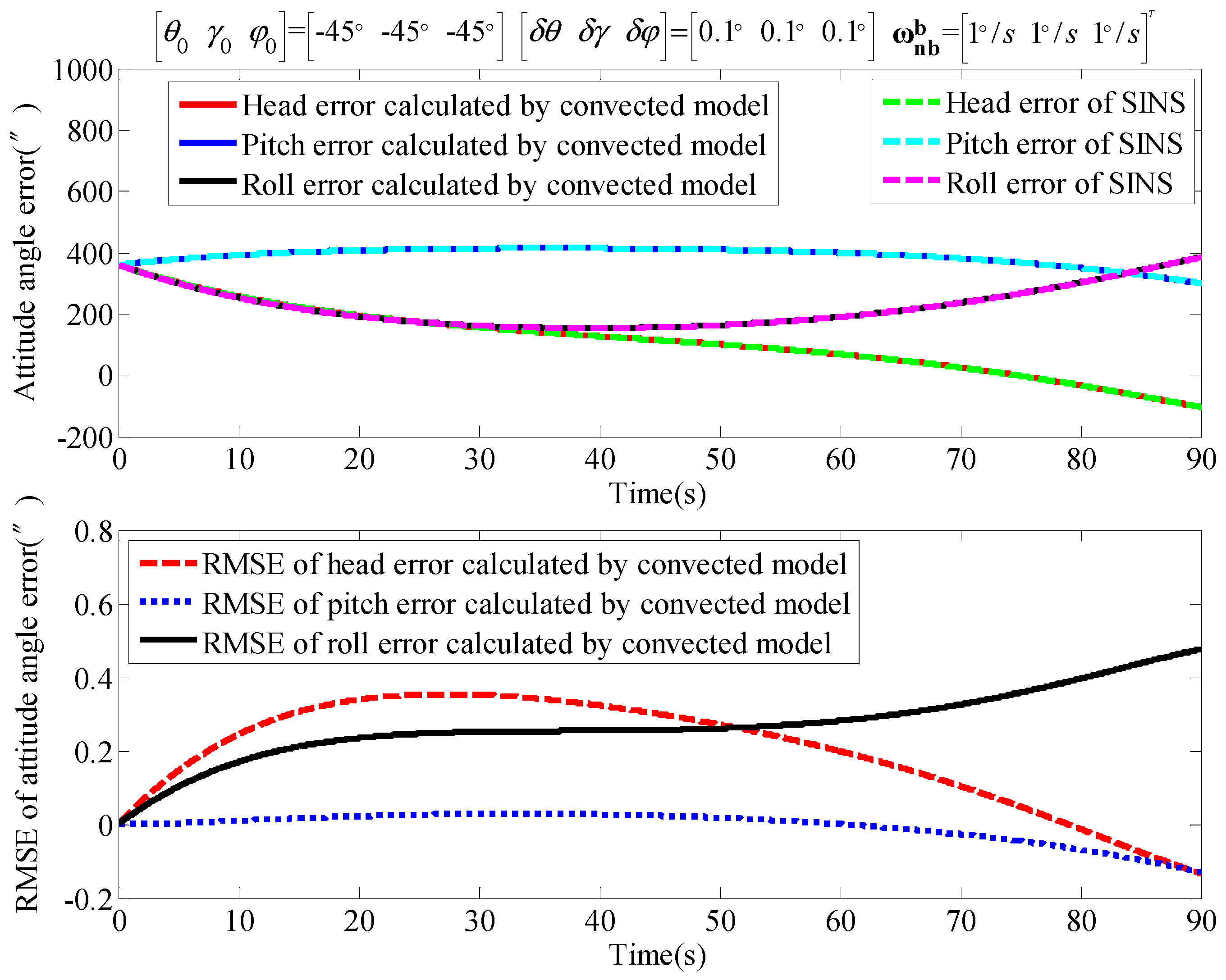
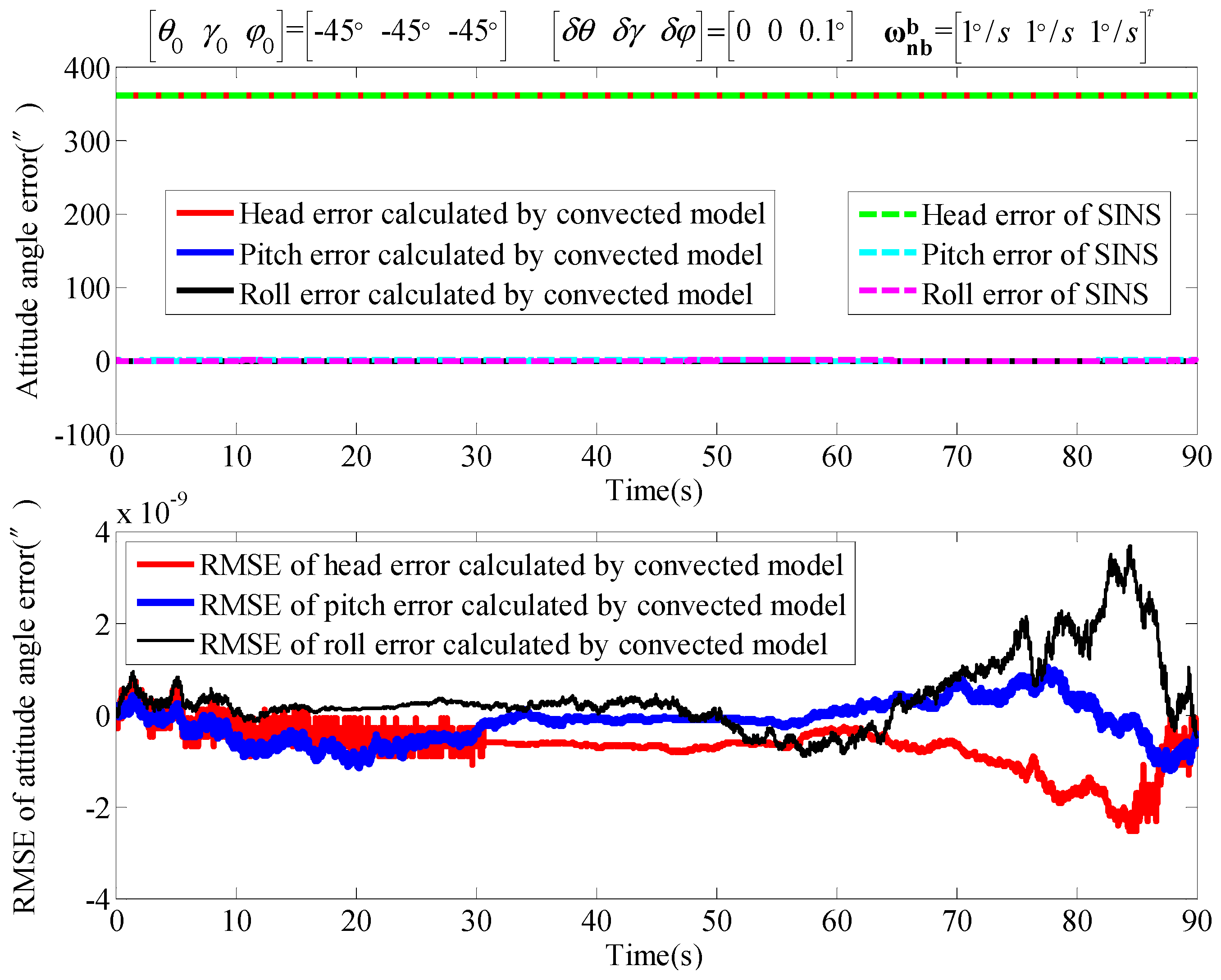
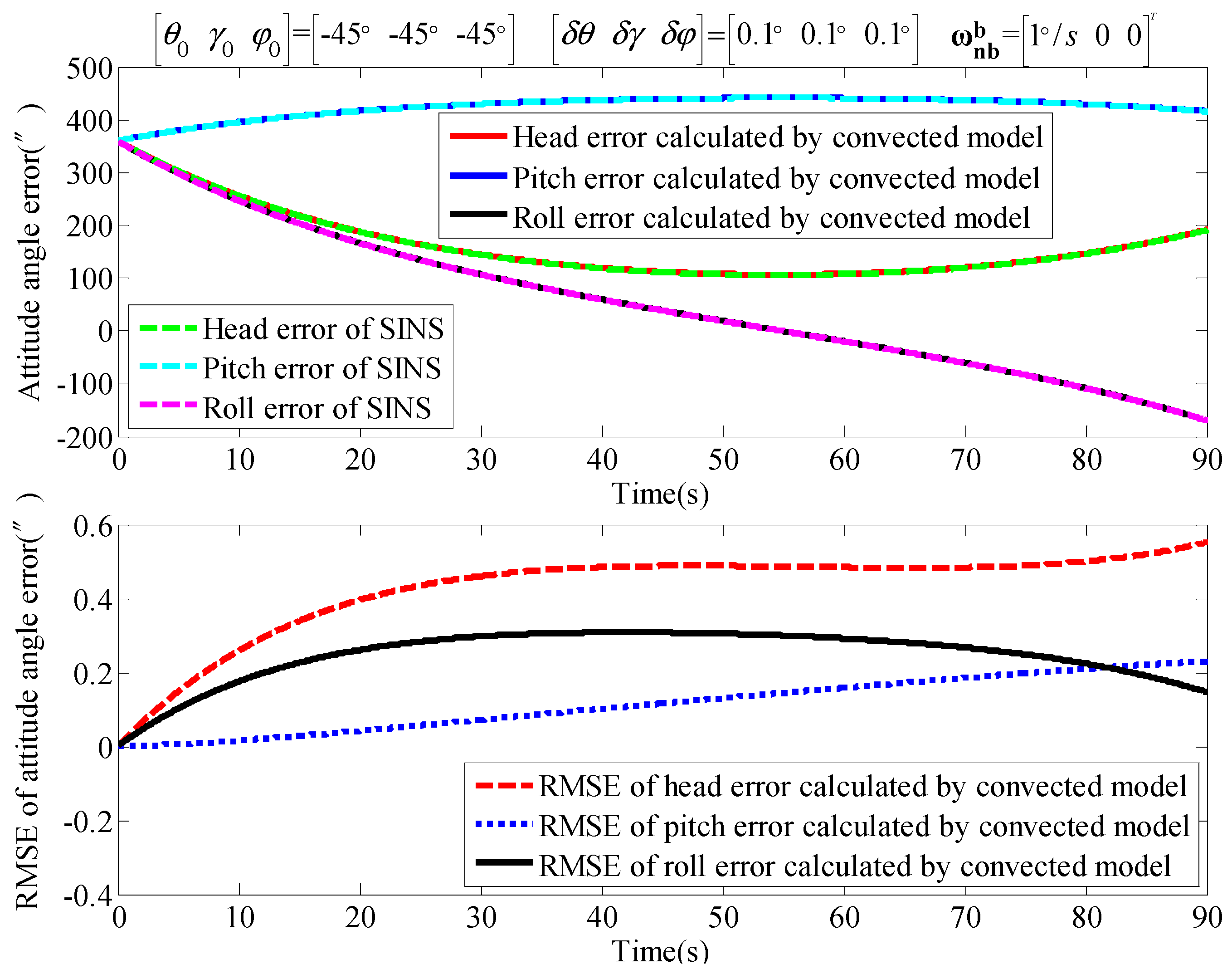
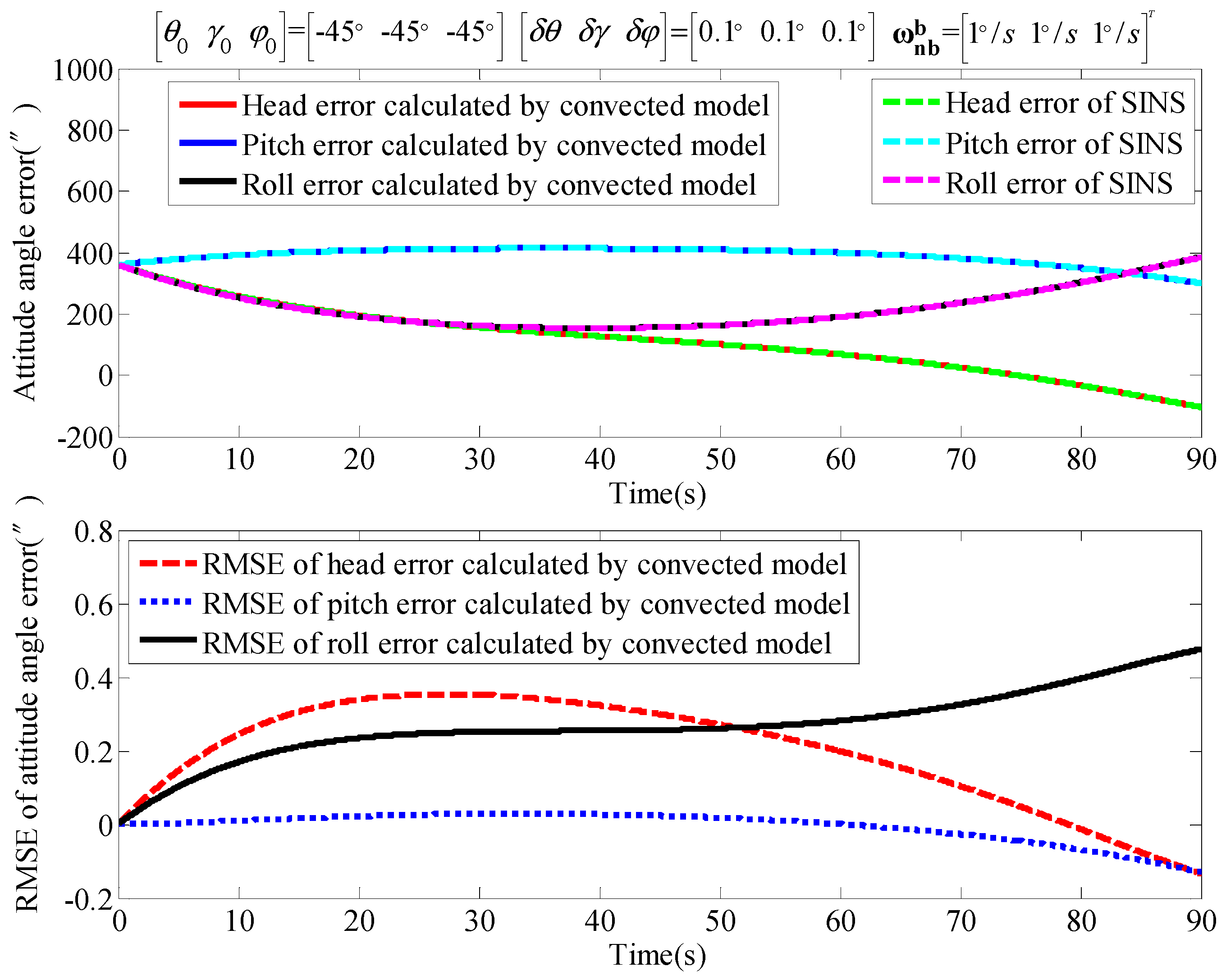
3.1. Simulation and Analysis of Convected Euler Angle Errors
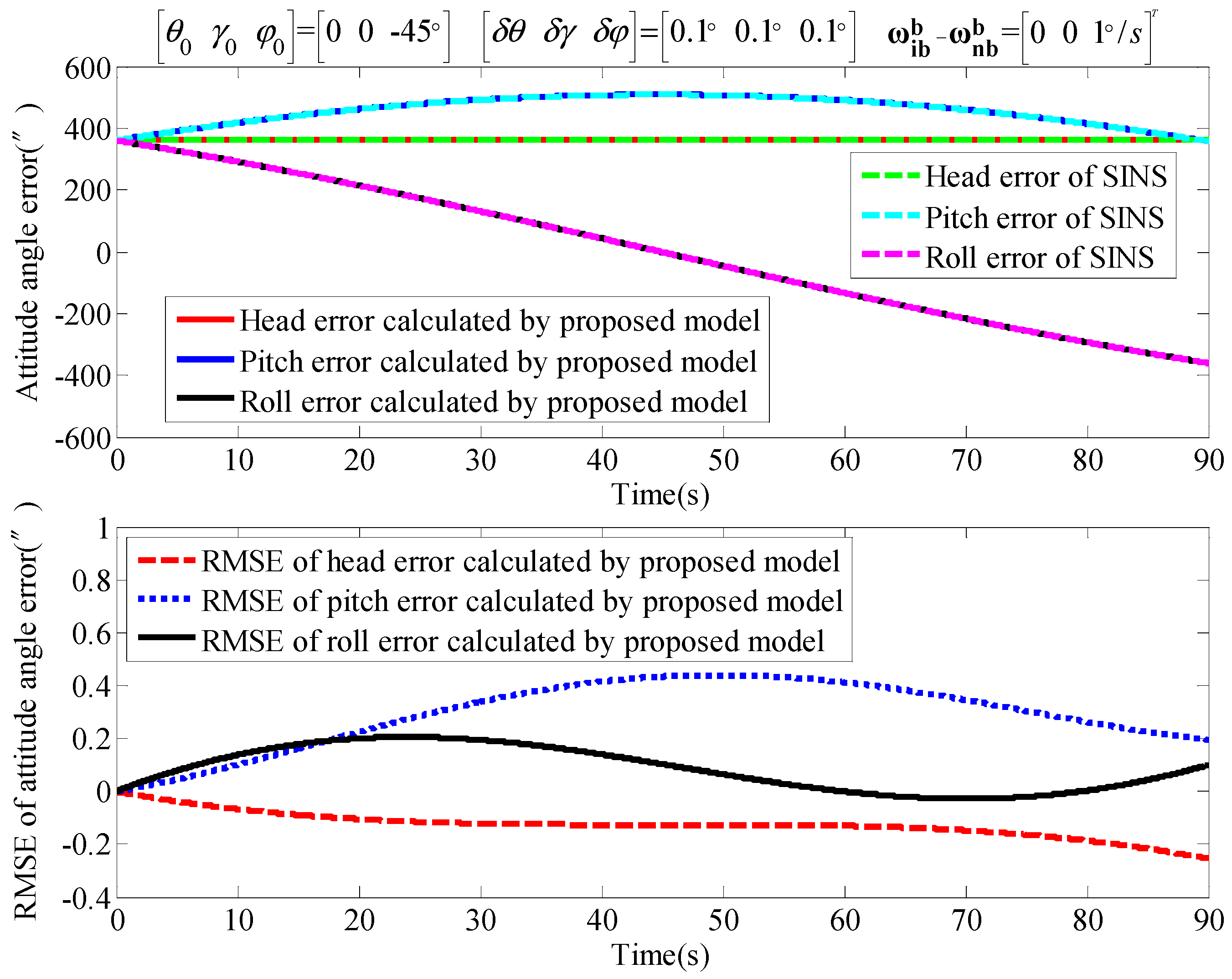
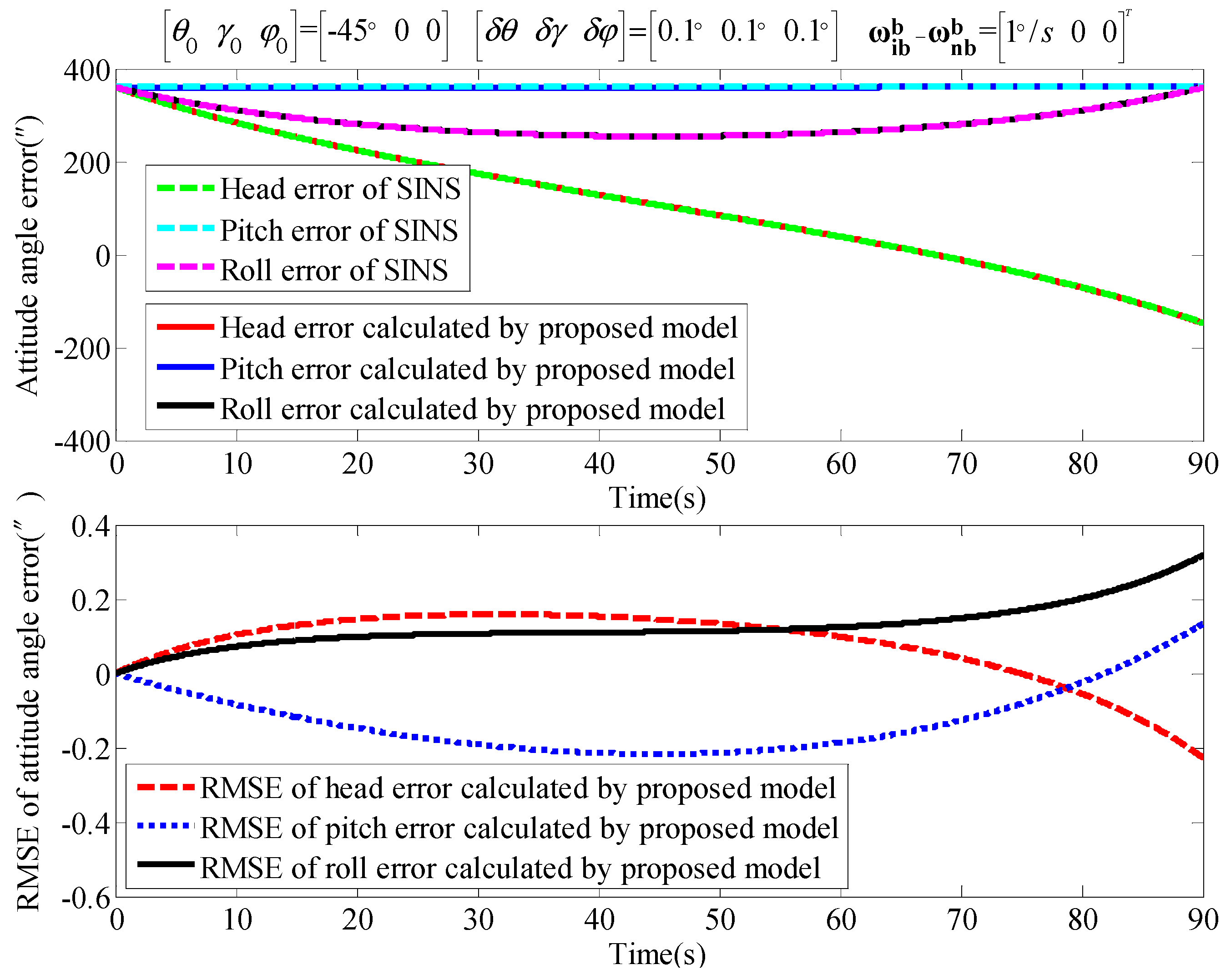
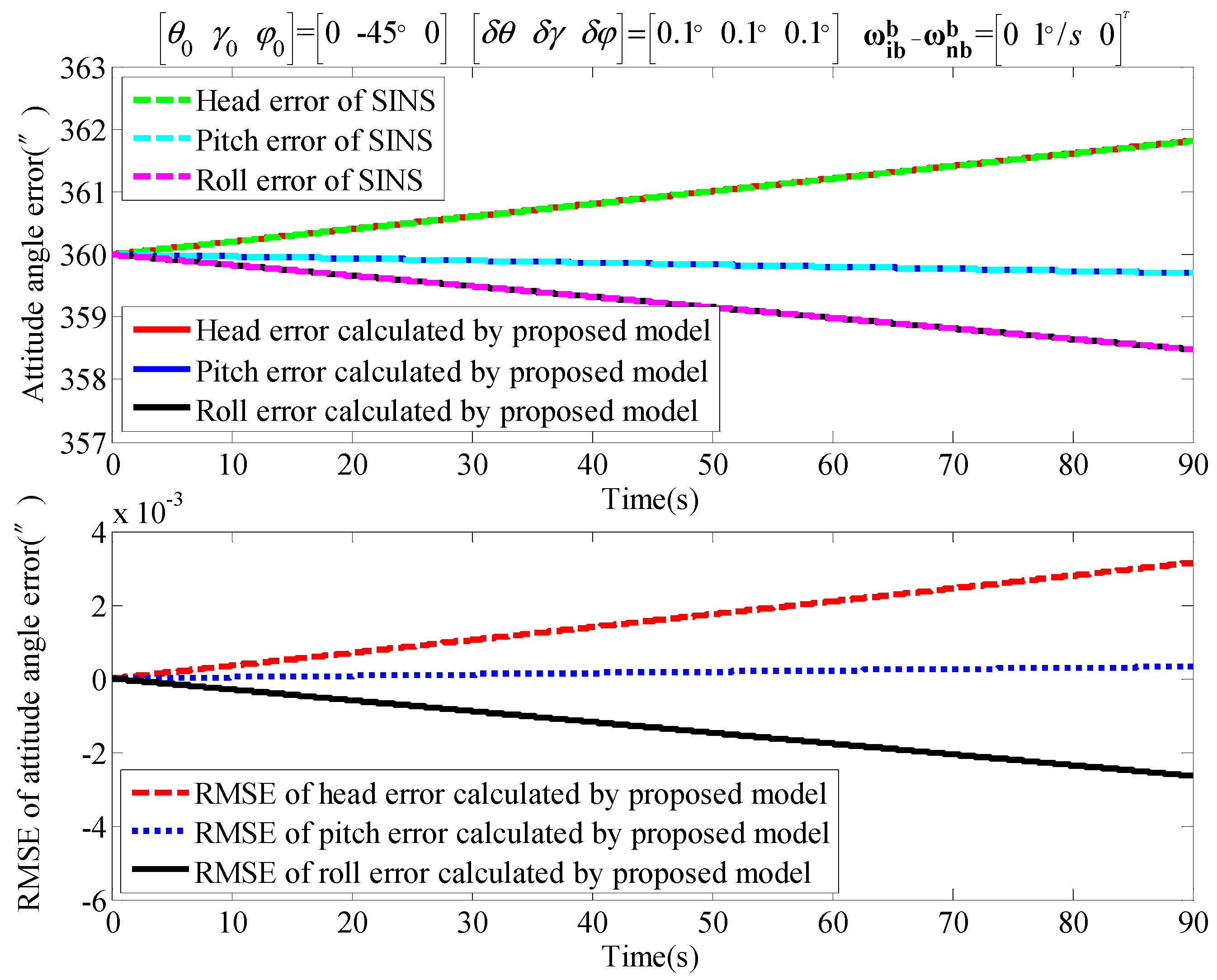
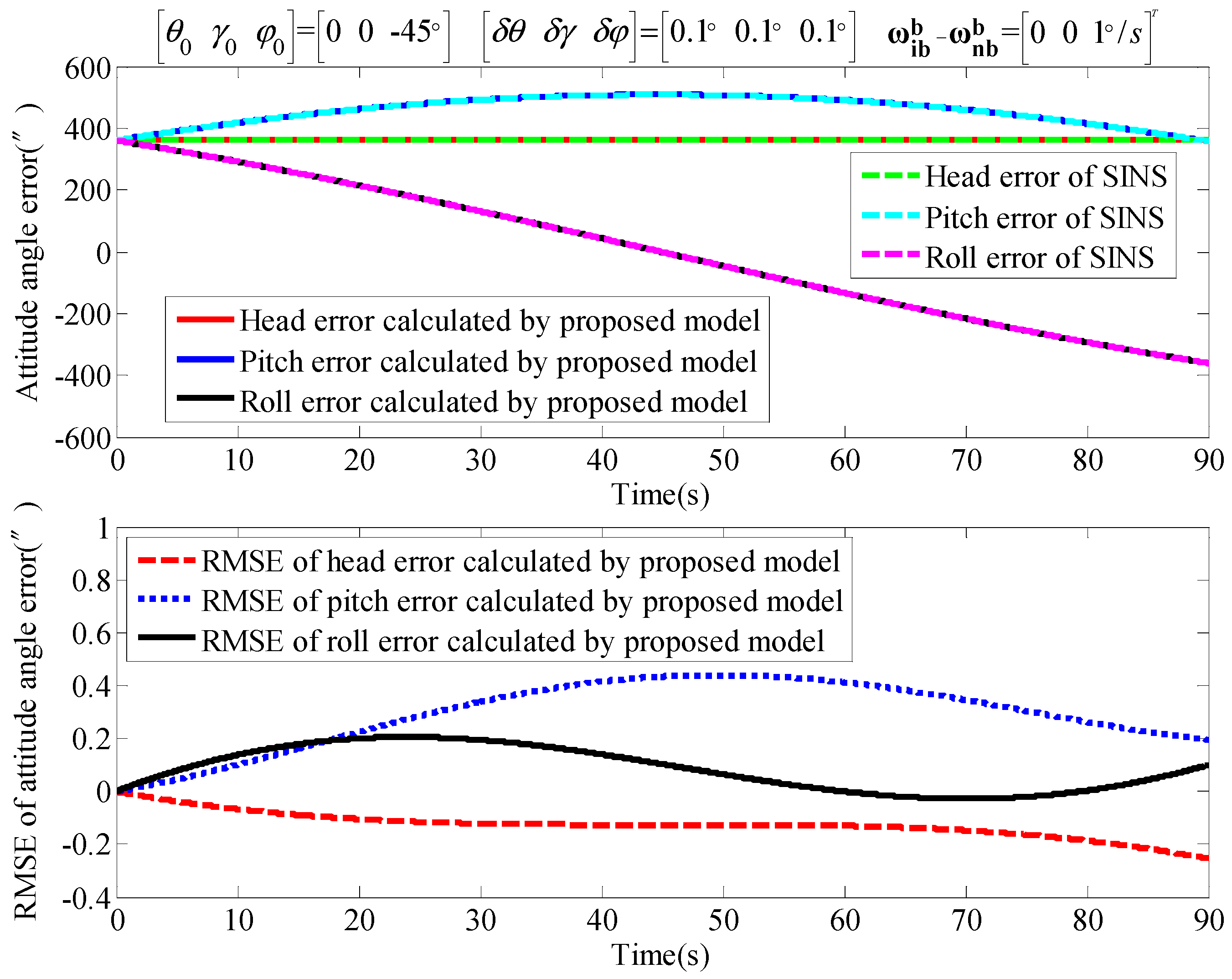
3.2. Simulation and Analysis of General Euler Angle Errors
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Notation | |
| Height, m | |
| Latitude, degree | |
| Angular velocity vector, rad/s | |
| Misalignment, degree | |
| The angular velocity error of the navigation frame with respect to the inertial Frame denoted in the body frame along X axis, rad/s | |
| The angular velocity error of the navigation frame with respect to the inertial Frame denoted in the body frame along Y axis, rad/s | |
| The angular velocity error of the navigation frame with respect to the inertial Frame denoted in the body frame along Z axis, rad/s | |
| The relative Euler angle error, rad | |
| The convected Euler angle error, rad | |
| Subscripts | |
| i | The inertial frame |
| b | The body frame |
| n | The navigation frame |
| e | The Earth frame |
| c | The computational frame |
References
- Wang, J.H.; Gao, Y. Land vehicle dynamics-aided inertial navigation. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1638–1653. [Google Scholar] [CrossRef]
- Wu, Y.X.; Hu, X.P.; Wu, M.P. Strapdown inertial navigation, using dual quaternion algebra: Error analysis. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 259–266. [Google Scholar]
- Cao, Q.; Zhong, M.Y.; Guo, J. Non-linear estimation of the flexural lever arm for transfer alignment of airborne distributed position and orientation system. IET Radar Sonar Navig. 2015, 11, 41–51. [Google Scholar] [CrossRef]
- Li, J.L.; Fang, J.C.; Du, M. Error analysis and gyro biases calibration of analytic coarse alignment for airborne POS. IEEE Trans. Instrum. Meas. 2012, 61, 3058–3064. [Google Scholar]
- Liu, X.X.; Zhao, Y.; Liu, Z.P.; Wang, L.H. A novel self-alignment method for SINS based on parameter recognition and dual-velocity vectors. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 2151–2162. [Google Scholar] [CrossRef]
- Wu, Y.X.; Pan, X.F. Velocity/position integration formula part I: Application to in-flight coarse alignment. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1006–1023. [Google Scholar] [CrossRef]
- Wu, Y.X. Further results on “velocity/position integration formula (I): Application to in-flight coarse alignment”. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 773–775. [Google Scholar] [CrossRef]
- Goshen, M.D.; Bar, I.I.Y. Unified approach to inertial navigation system error modeling. J. Guid. Control Dyn. 1992, 15, 648–653. [Google Scholar] [CrossRef]
- Fang, J.C.; Gong, X.L. Predictive iterated Kalman filter for INS/GPS integration and its application to SAR motion compensation. IEEE Trans. Instrum. Meas. 2010, 59, 909–915. [Google Scholar] [CrossRef]
- Arshal, G. Error equations of inertial navigation. J. Guid. Control Dyn. 1987, 10, 351–358. [Google Scholar] [CrossRef]
- Silva, F.O.; Hemerly, E.M.; Filho, W.C.L. Error Analysis of Analytical Coarse Alignment Formulations for Stationary SINS. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1777–1796. [Google Scholar] [CrossRef]
- Hao, Y.L.; Gong, J.; Gao, W.; Li, L. Research on the dynamic error of strapdown inertial navigation system. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 5–8 August 2008; pp. 814–819. [Google Scholar]
- Xiong, J.; Guo, H.; Yang, Z.H. A two-position SINS initial alignment method based on gyro information. Adv. Space Res. 2014, 53, 1657–1663. [Google Scholar] [CrossRef]
- Chang, G.B. Fast two-position initial alignment for SINS using velocity plus angular rate measurements. Adv. Space Res. 2015, 56, 1331–1342. [Google Scholar] [CrossRef]
- Chen, K.; Zhao, G.; Meng, Z. Equivalent approaches to equations of traditional transfer alignment and rapid transfer alignment. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 892–895. [Google Scholar]
- Wang, M.S.; Wu, W.Q.; Wang, J.L.; Pan, X.F. High-order attitude compensation in coning and rotation coexisting environment. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1178–1190. [Google Scholar] [CrossRef]
- Savage, P.G. Analytical modeling of sensor quantization in strapdown inertial navigation error equations. J. Guid. Control Dyn. 2002, 25, 833–842. [Google Scholar] [CrossRef]
- Zhong, M.Y.; Gao, S.S.; Li, W. A quaternion-based method for SINS/SAR integrated navigation system. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 514–524. [Google Scholar] [CrossRef]
- Lu, J.J.; Xie, L.L.; Li, B.G. Applied quaternion optimization method in transfer alignment for airborne AHRS under large misalignment angle. IEEE Trans. Instrum. Meas. 2016, 65, 346–354. [Google Scholar] [CrossRef]
- Jing, W.X.; Xia, X.W.; Gao, C.S.; Wei, W.S. Attitude control for spacecraft with swinging large-scale payload. Chin. J. Aeronaut. 2011, 24, 309–317. [Google Scholar] [CrossRef]
- Janota, A.; Šimák, V.; Nemec, D. Improving the precision and speed of Euler angles computation from low-cost rotation sensor data. Sensors 2015, 15, 7016–7039. [Google Scholar] [CrossRef] [PubMed]
- Zheng, L.L.; Jiang, Y.X. A single CCD algorithm to determine the position and attitude during rolling phase of rendezvous and docking. Digit. Manuf. Autom. 2012, 190–191, 813–818. [Google Scholar] [CrossRef]
- Taki, S.; Nenchev, D. Euler angle based feedback control of large eigenaxis rotations in the presence of singularities and model uncertainty. In Proceedings of the International Conference on Control, Automation and Systems, Gwangju, Korea, 20–23 October 2013; pp. 34–39. [Google Scholar]
- Wu, Z.W.; Yao, M.L.; Ma, H.G.; Jia, W.M.; Tian, F.H. Low-cost antenna attitude estimation by fusing inertial sensing and two-antenna GPS for vehicle-mounted satcom-on-the-move. IEEE Trans. Veh. Technol. 2013, 62, 1084–1096. [Google Scholar] [CrossRef]
- Bozek, P.; Al Akkad, M.A.; Blištan, P.; Ibrahim, N.I. Navigation control and stability investigation of a mobile robot based on a hexacopter equipped with an integrated manipulator. Int. J. Adv. Robot. Syst. 2017, 14, 1–13. [Google Scholar] [CrossRef]
- Hunt, J.; Lee, H.; Artemiadis, P. A novel shoulder exoskeleton robot using parallel actuation and a passive slip interface. J. Mech. Robot. Trans. ASME 2017, 9, 1–7. [Google Scholar] [CrossRef]
- Klein, J.; Spencer, S.J.; Reinkensmeyer, D.J. Breaking it down is better: Haptic decomposition of complex movements aids in robot-assisted motor Learning. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 268–275. [Google Scholar] [CrossRef] [PubMed]
- Toz, M.; Kucuk, S. Dynamics simulation toolbox for industrial robot manipulators. Comput. Appl. Eng. Educ. 2010, 18, 319–330. [Google Scholar] [CrossRef]
- Ruzaij, M.F.; Neubert, S.; Stoll, N.; Thurow, K. Multi-sensor robotic-wheelchair controller for handicap and quadriplegia patients using embedded technologies. In Proceedings of the International Conference on Human System Interactions, Portsmouth, UK, 6–8 July 2016; pp. 103–109. [Google Scholar]
- Phillips, W.F.; Hailey, C.E.; Gebert, G.A. Review of attitude representations used for aircraft kinematics. J. Aircr. 2001, 38, 718–737. [Google Scholar] [CrossRef]
- Lee, J.H.; Shin, S.S.; Yoon, S.J. A comparison study of real-time solution to all-attitude angles of an aircraft. J. Mech. Sci. Technol. 2006, 20, 376–381. [Google Scholar]
- Xia, X.W.; Jing, W.X.; Li, C.Y.; Gao, C.S. Time-shared scheme design for attitude control system during space separation. Aerosp. Sci. Technol. 2011, 15, 108–116. [Google Scholar] [CrossRef]
- Hu, P.D.; Wang, S.Y.; Zhang, R.; Liu, X.X.; Xu, B. Fast heading-rotation-based high-accuracy misalignment angle estimation method for INS and GNSS. Measurement 2017, 102, 208–213. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulations | Head Error (″) | Pitch Error (″) | Roll Error (″) | Maximum Error (″) |
|---|---|---|---|---|
| First group I | 2.168 × 10−9 | 2.067 × 10−9 | 1.471 × 10−9 | 2.168 × 10−9 |
| Second group II | 8.484 × 10−10 | 4.571 × 10−10 | 8.967 × 10−10 | 8.967 × 10−10 |
| Third group III | 0.4441 | 0.1350 | 0.2573 | 0.4441 |
| Fourth group IV | 0.2437 | 0.0405 | 0.2847 | 0.2847 |
| Simulations | Head Error (″) | Pitch Error (″) | Roll Error (″) | Maximum Error (″) |
|---|---|---|---|---|
| First group I | 0.1204 | 0.1536 | 0.1381 | 0.1536 |
| Second group II | 0.0018 | 0.0002 | 0.0015 | 0.0018 |
| Third group III | 0.1349 | 0.3195 | 0.1176 | 0.3195 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Dang, P.; Li, Y.; Gu, B. A General Euler Angle Error Model of Strapdown Inertial Navigation Systems. Appl. Sci. 2018, 8, 74. https://doi.org/10.3390/app8010074
Li J, Dang P, Li Y, Gu B. A General Euler Angle Error Model of Strapdown Inertial Navigation Systems. Applied Sciences. 2018; 8(1):74. https://doi.org/10.3390/app8010074
Chicago/Turabian StyleLi, Jianli, Pengfei Dang, Yiqi Li, and Bin Gu. 2018. "A General Euler Angle Error Model of Strapdown Inertial Navigation Systems" Applied Sciences 8, no. 1: 74. https://doi.org/10.3390/app8010074
APA StyleLi, J., Dang, P., Li, Y., & Gu, B. (2018). A General Euler Angle Error Model of Strapdown Inertial Navigation Systems. Applied Sciences, 8(1), 74. https://doi.org/10.3390/app8010074