1. Introduction
In recent years, there has been a growing demand for earth observation satellites equipped with highly accurate observation sensors to capture high-resolution images of certain points on the ground. For example, earth observation satellites including IKONOS which is launched in 1999, have made emergency observations to determine the detailed situation of disaster areas, and made efforts to utilize this information to prevent secondary disasters and aid in prompt reconstruction. In order to direct the sensors to the ground in comparison with sweeping the earth’s surface, such earth observation satellites need to improve their agility in large-angle attitude maneuvers. Moreover, methods that enable highly accurate attitude determination by online sensors such as the star tracker (ST) and inertial measurement unit (IMU), as well as global positioning system (GPS) based methods [
1,
2] have been proposed. Thus, high accuracy of attitude control is also needed using this information.
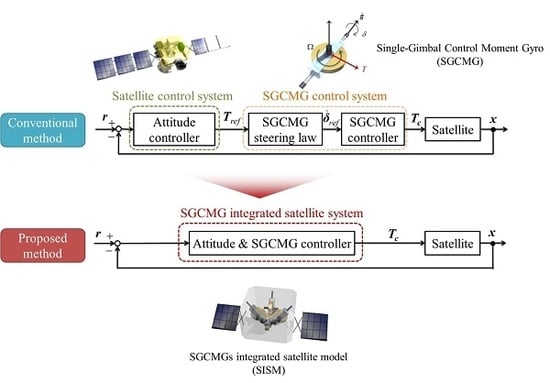
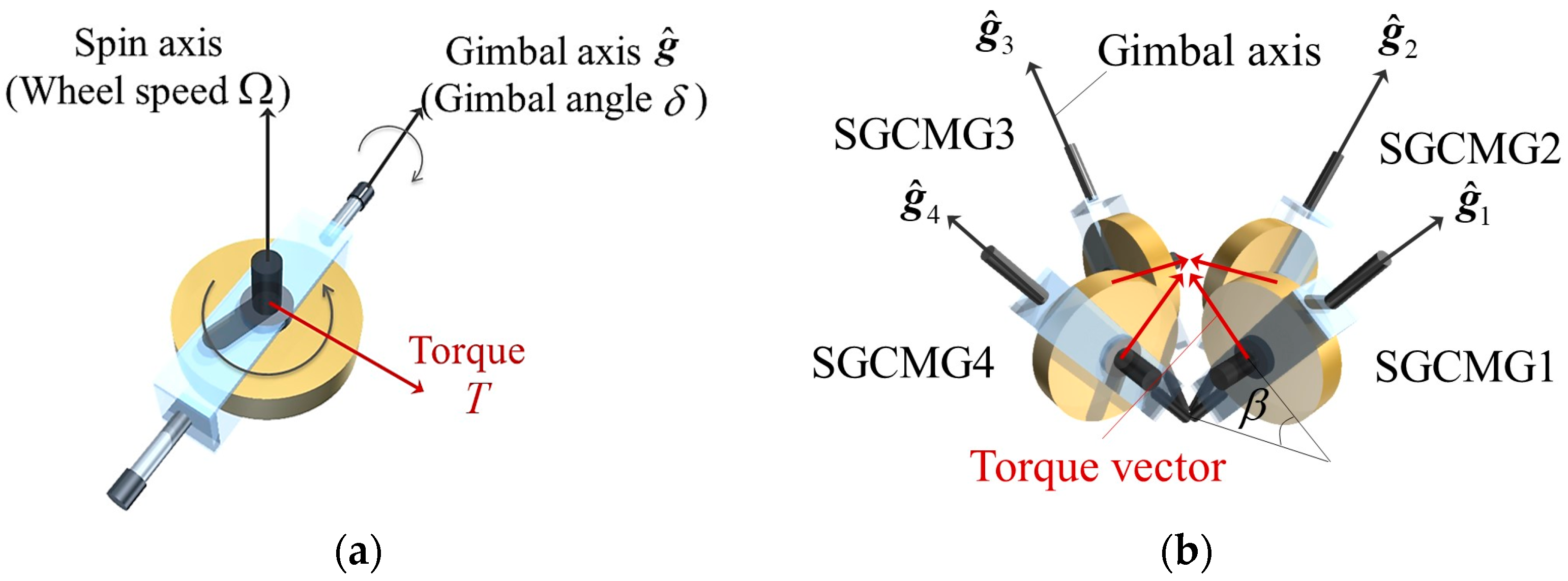
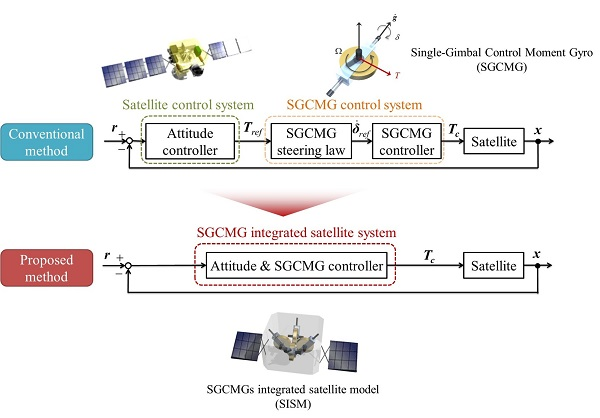
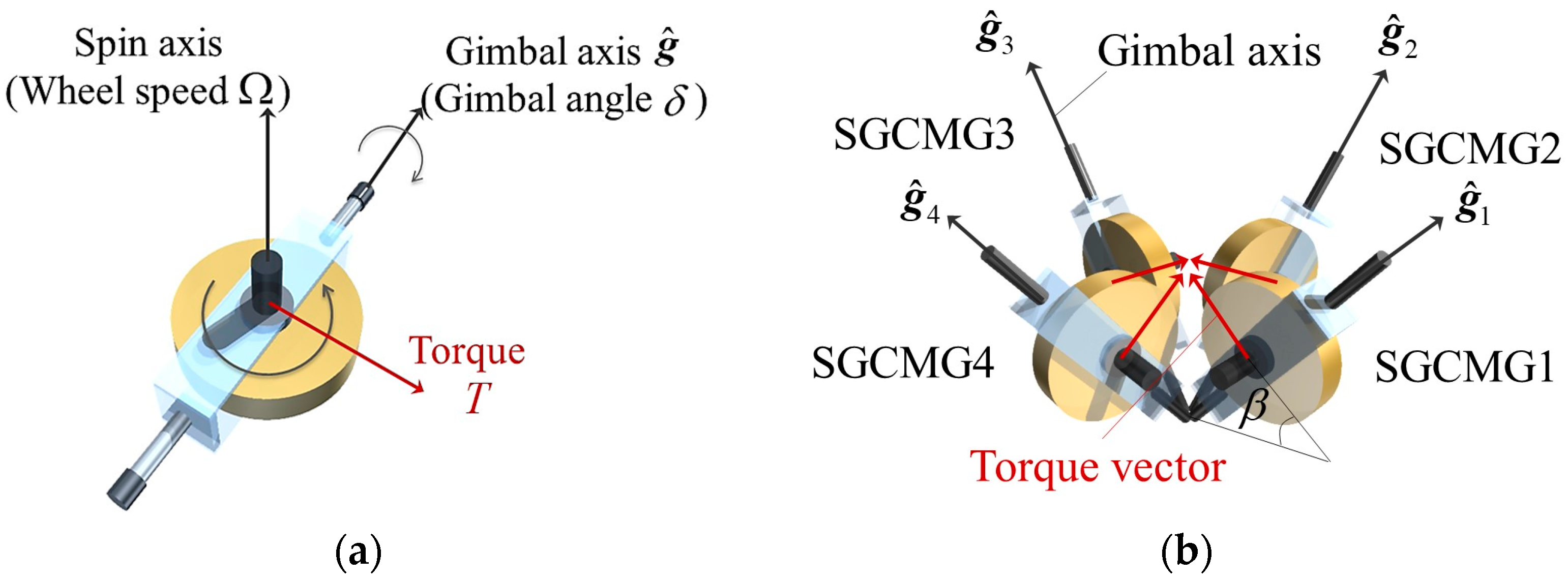
To achieve the above-described agile large-angle attitude maneuver, a single-gimbal control moment gyro (SGCMG) should be mounted as a modern-type actuator. The SGCMG (as shown in
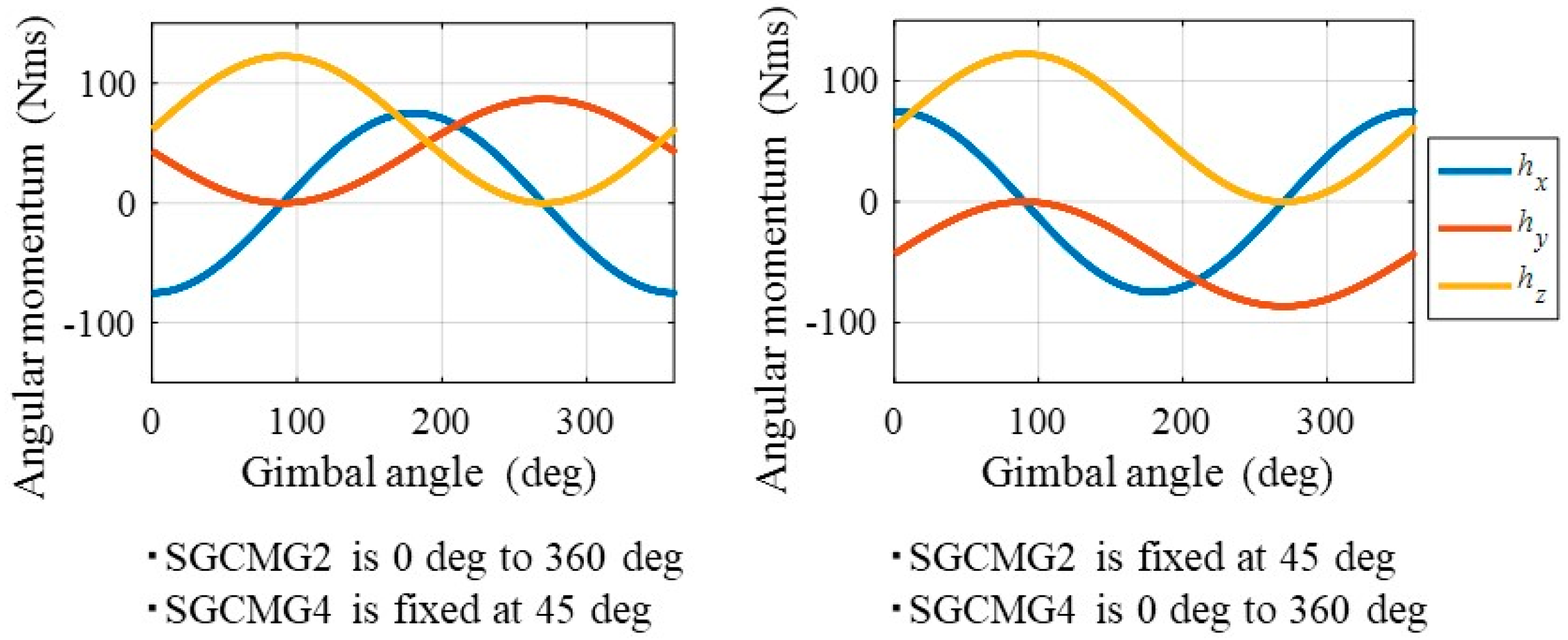
Figure 1a) is an internal force actuator that outputs a large torque owing to the gyro effect generated by rotating a gimbal. Normally, from the viewpoint of the redundancy and symmetry of angular momentum, the SGCMG should be equipped on a four-skew array like a pyramid, as shown in
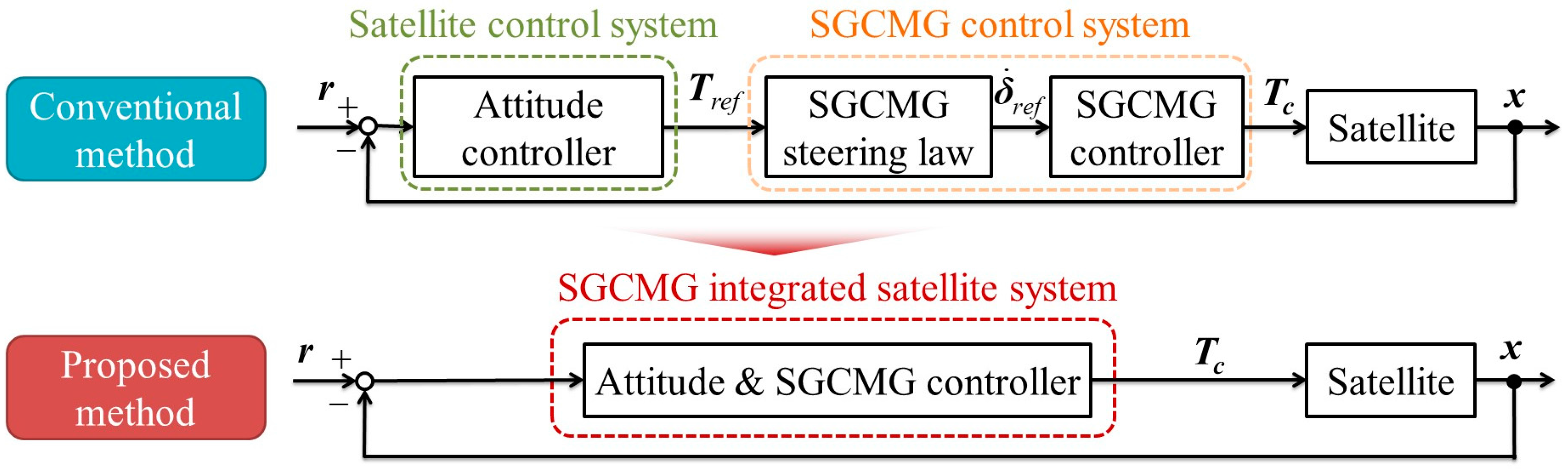
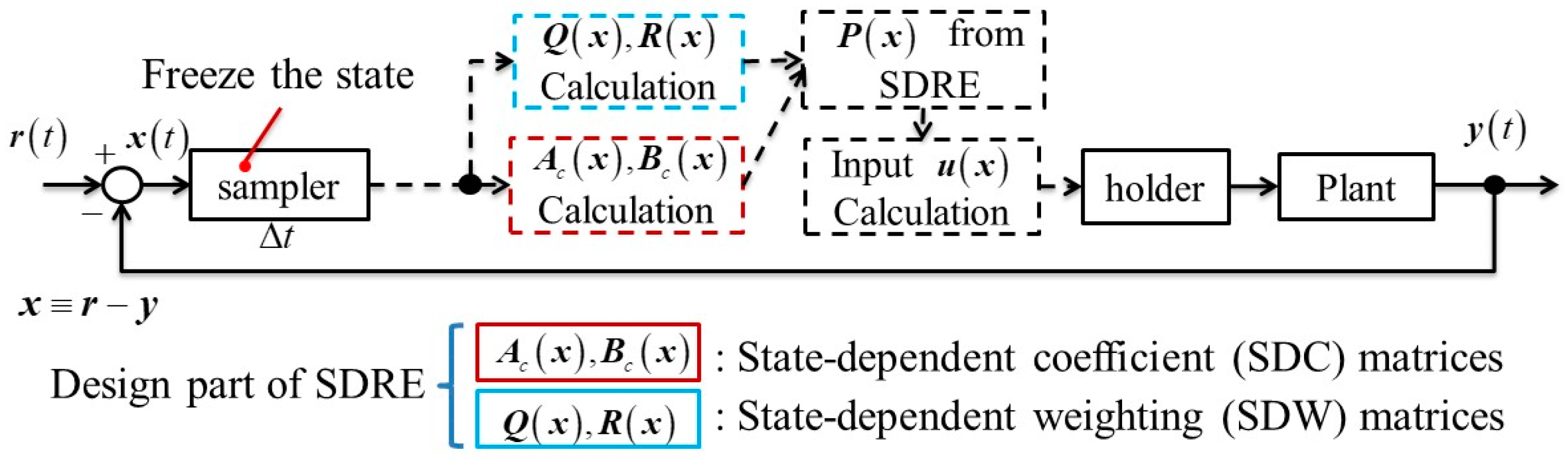
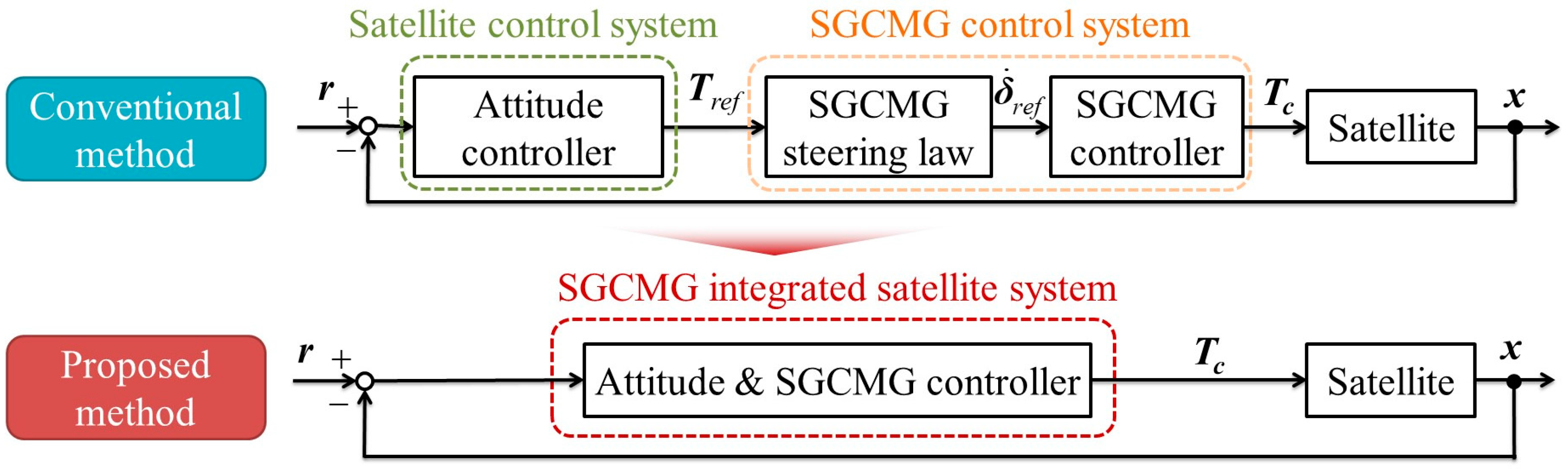
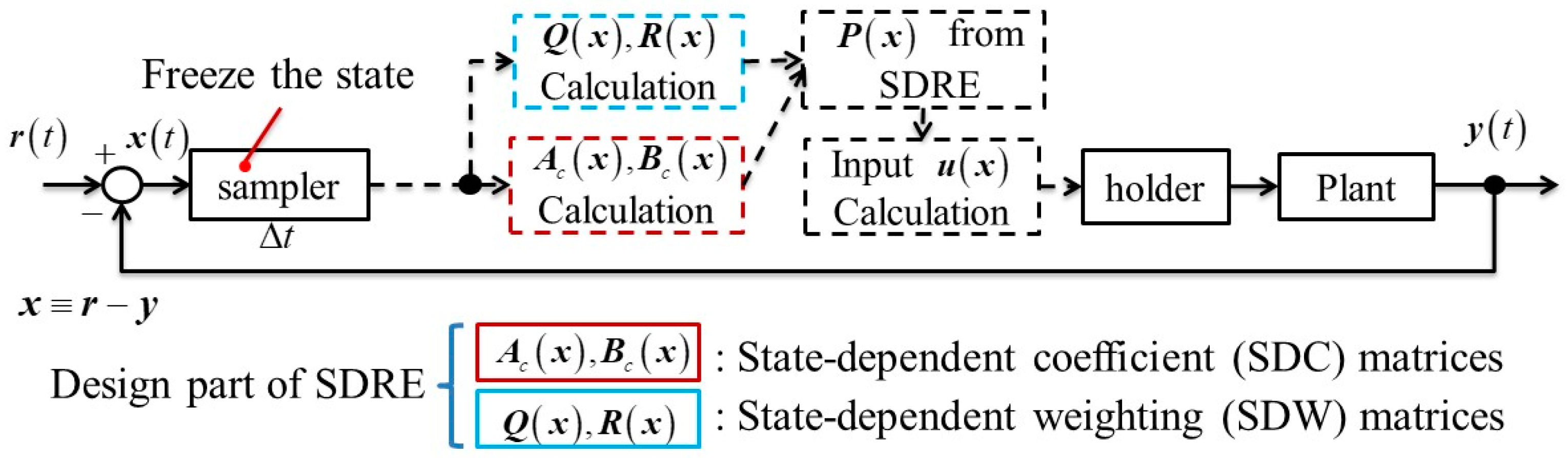
Figure 1b. In the conventional works on agile attitude maneuvers of a satellite using SGCMGs as actuators, the gimbal angular velocity is calculated by solving the pseudo inverse matrix of the SGCMGs Jacobian matrix from the torque command value calculated by the satellite attitude control system and input to the SGCMGs system (upper part of
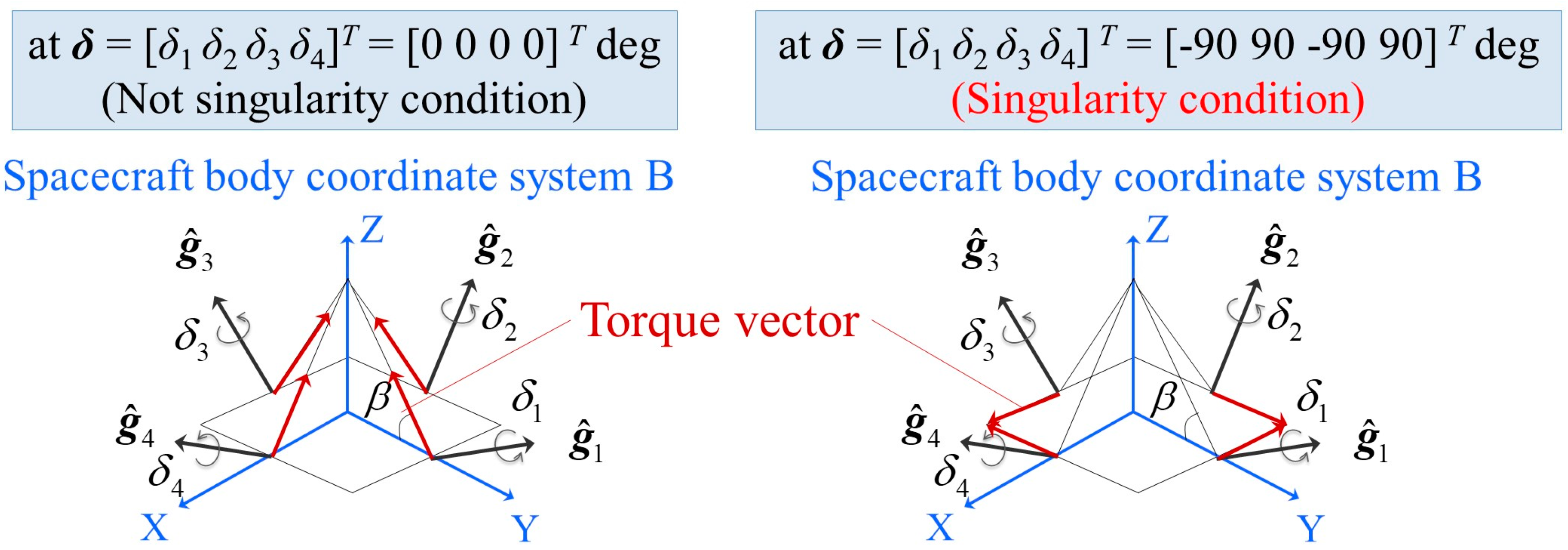
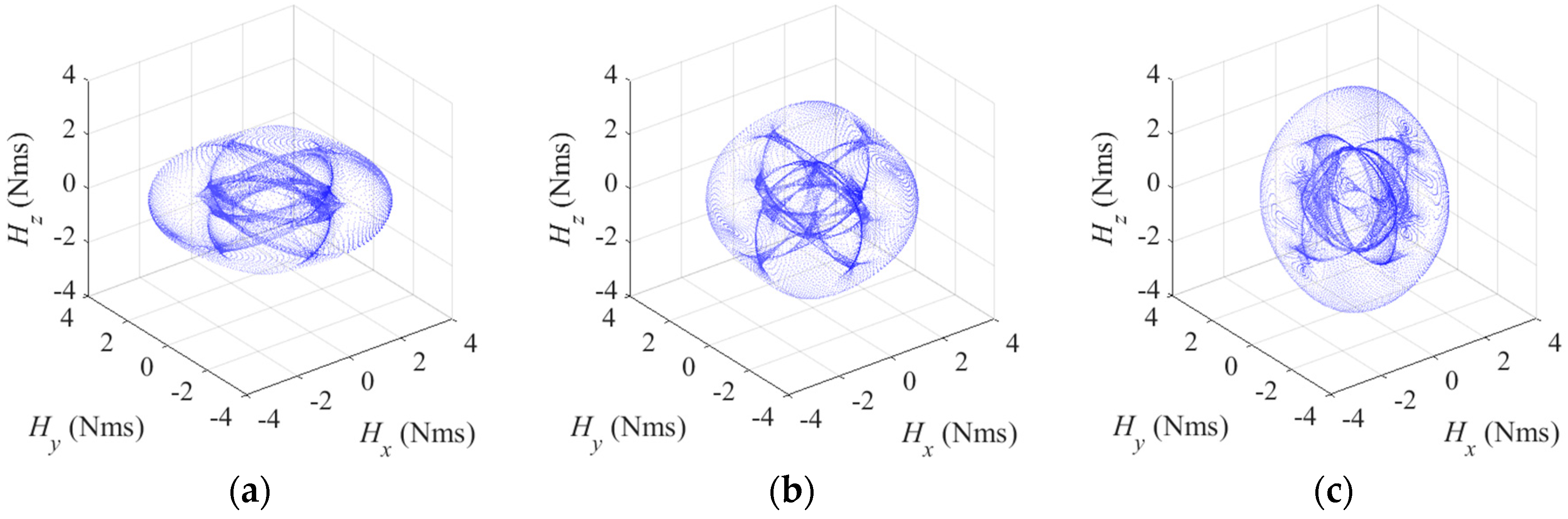
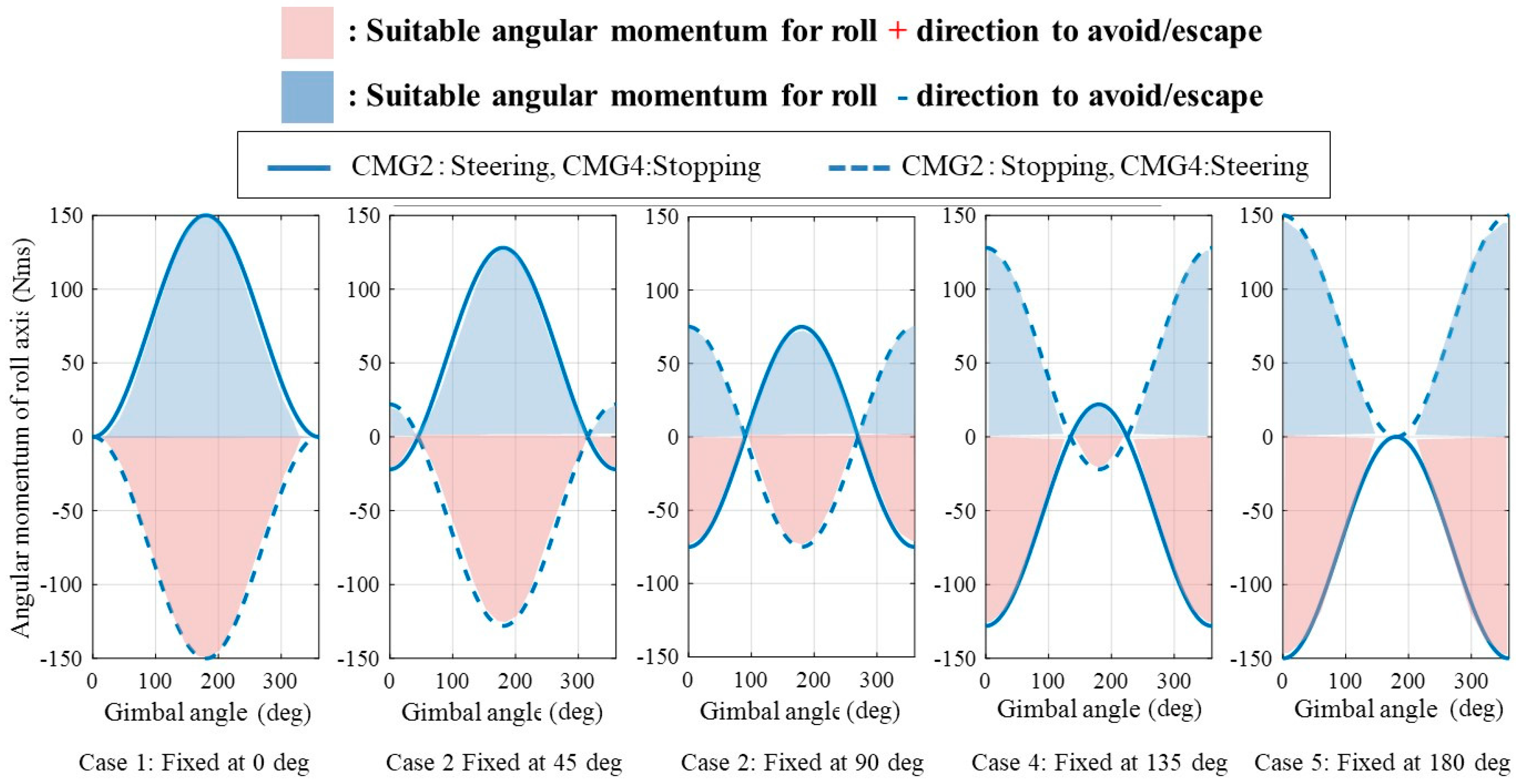
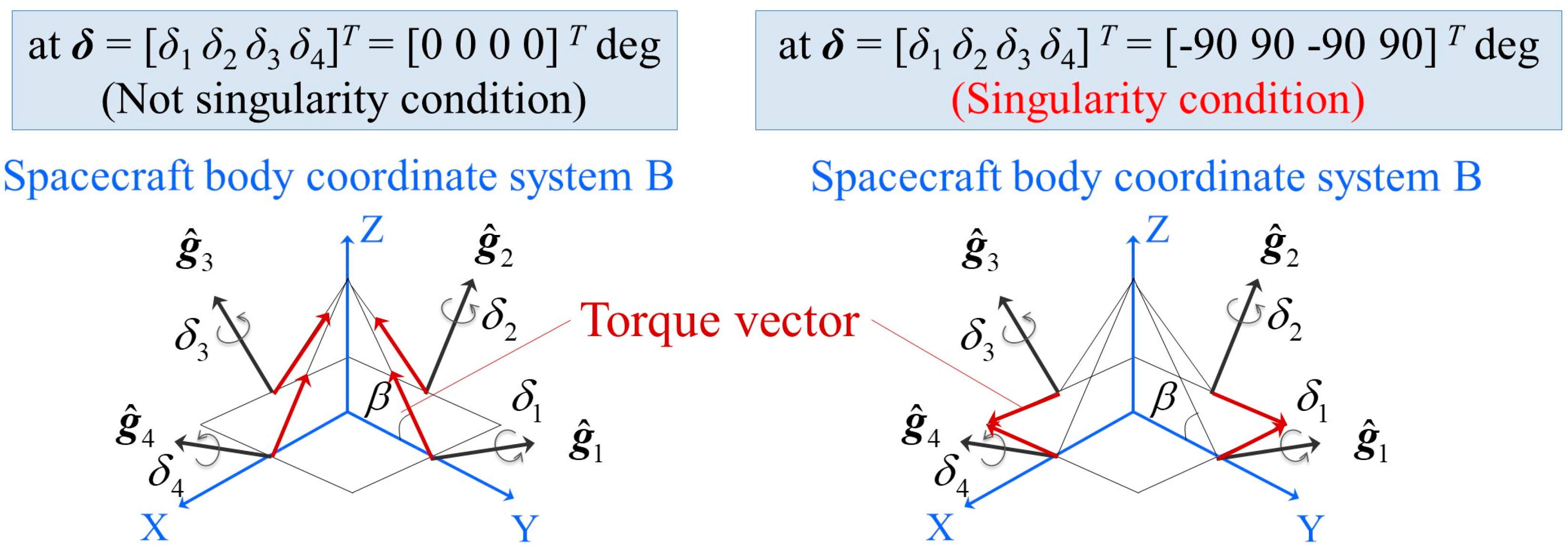
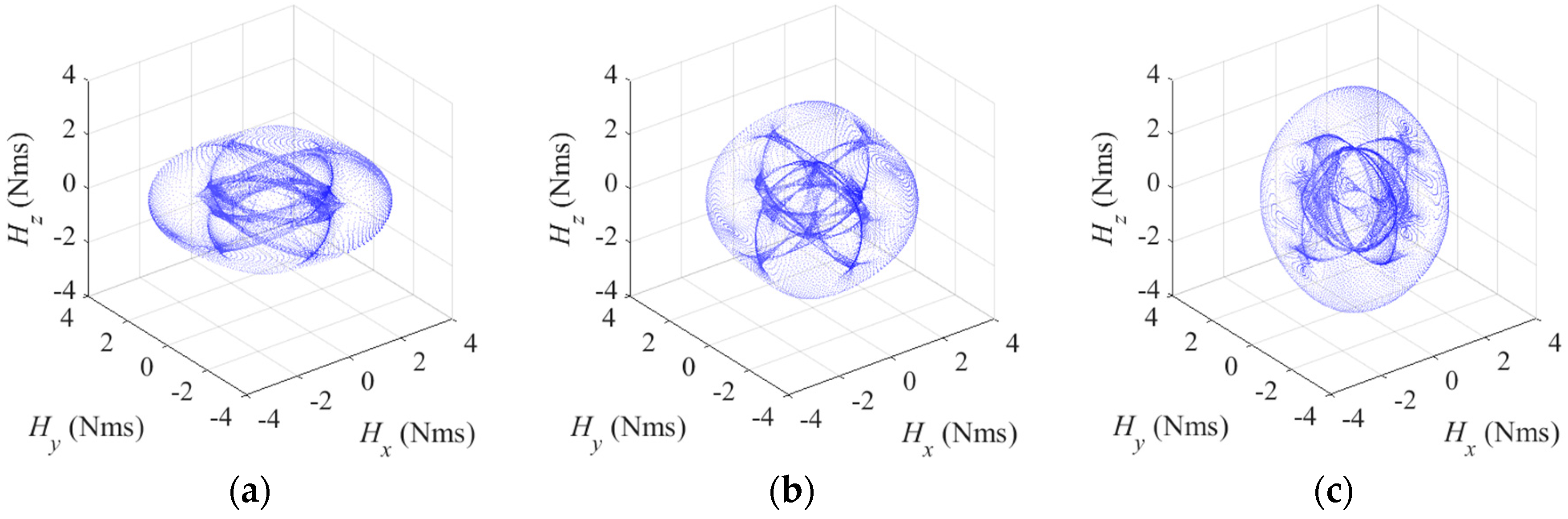
Figure 2). This control system structure has been extensively studied because of the shape of the Jacobian matrix with respect to the SGCMGs and the strong nonlinearity depending on its time variation. As usual, the singularity problem always exists for SGCMGs during the large-angle maneuvering of satellites. In the singularity, input may not be sometimes required, in which the possible output direction is degenerated owing to the combination of the gimbal angle, as shown in
Figure 3. Therefore, it was necessary to design the attitude control system and the SGCMG control system separately.
As a countermeasure to the singularity problem, a number of avoidance/escape steering laws have been proposed. The singularity avoidance law of null motion by the projection matrix [
3] and Jacobian cofactor [
4] were firstly proposed, followed by a steering law for avoiding singularity to reduce the error of the output torque [
5]. After that, a nondiagonal singularity robust steering law to escape the singular surface with torque error [
6] and a generalized singularity robust (GSR) steering law [
7], as well a method to make it possible to adjust the design parameters of the GSR steering law [
8] were put forward. Furthermore, methods combining multiple singularity avoidance/escaping steering laws [
9,
10] were proposed. Subsequently, methods to avoid singularity by feed-forward inputs using a Fourier basis algorithm [
11], path planning of angular momentum [
12] or gimbal angle [
13] appeared. In such conventional methods, it is possible that the desired control torque cannot provide output to the satellite determined by the attitude control system, and it cannot guarantee the attitude stability of the satellite under the singularity of SGCMGs. These issues caused by the singularity avoidance/escape cannot be taken into account in the attitude control system. Consequently, the possibility of adverse effects on the robustness of the attitude control system cannot be excluded.
Moreover, it is mathematically difficult to find a correct solution because the solution by the pseudo inverse method is the maximum likelihood solution, and the condition number of the matrix becomes extremely large near singularity (Jacobian matrix is ill-conditioned). Thus, an accurate solution cannot be calculated in some cases when the Jacobian matrix is ill-conditioned because calculation errors owing to round-off errors are greatly amplified [
14,
15]. As a countermeasure, regularization methods of the matrix for reducing calculation errors have been proposed, but the calculation costs tend to be high because repetitive calculation is necessary [
14,
15,
16]. Considering actual operation, rounding errors are likely to be included because of the restrictions on the performance of the on-board computer. In addition, since the Jacobian matrix is time-varying, it is necessary to solve the regularization method in every control cycle. Therefore, it is considered that it is difficult to calculate an accurate solution of the pseudo inverse method in the on-board computer under a singularity where the calculation errors become large. Consequently, it is considered that a control system for calculating the control input to the SGCMGs is necessary without solving the pseudo inverse matrix.
In view of the above background, an attitude control system that can generate the gimbal angular velocity input without solving inverse kinematics (as the main control system), is required, as shown in lower part of
Figure 2. Accordingly, we will integrate the satellite and SGCMGs and design a model with the gimbal angular velocity as the control input. To realize this, state-dependent linear representation (SDLR) in the state-dependent Riccati equation (SDRE) controller [
17,
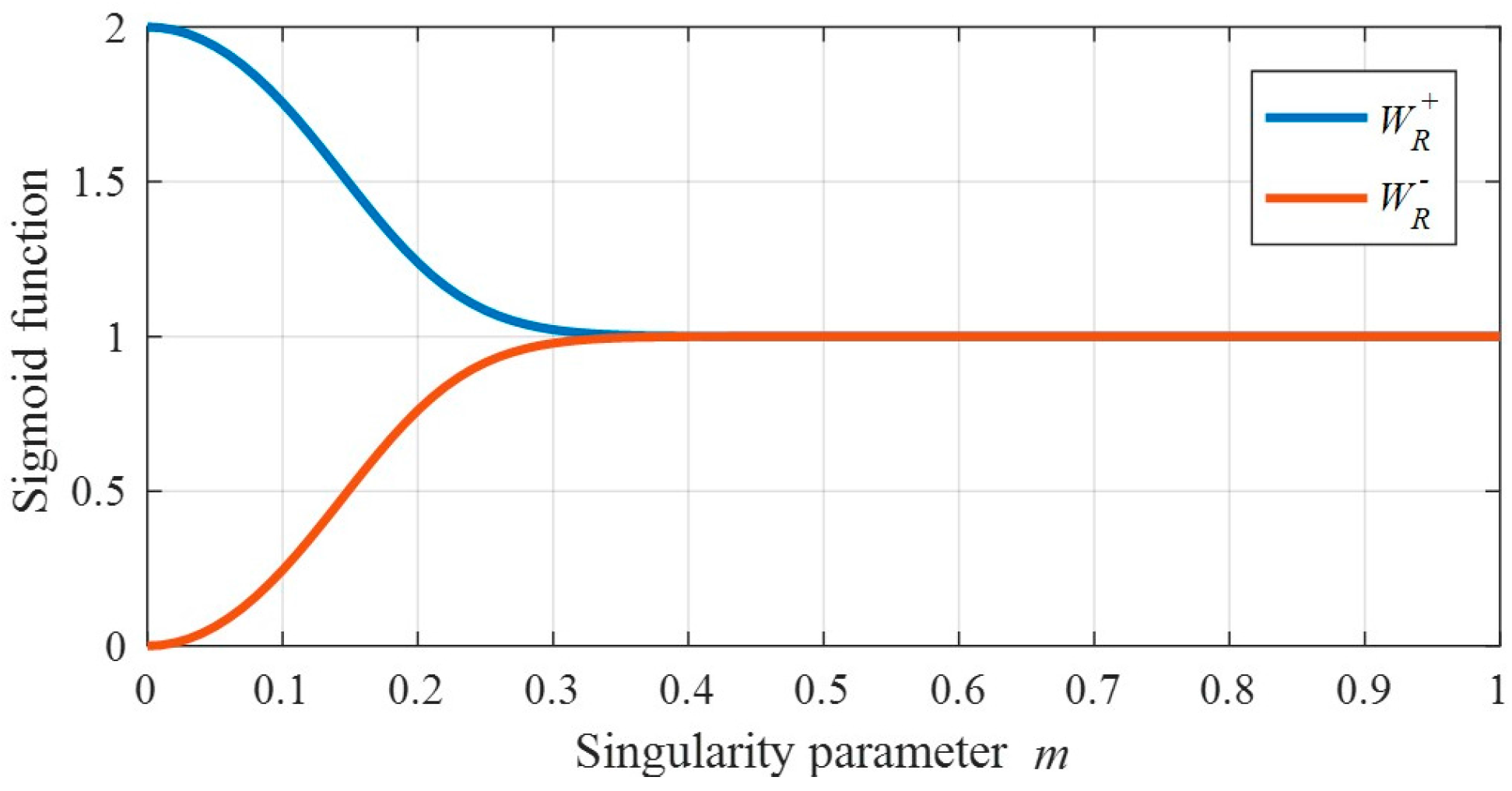
18] is used. This proposed control system is able to gain attitude stability and robustness even in a singularity because the optimal gimbal angular velocity input is guaranteed by the SDRE controller. Furthermore, by designing SDLR with an error representation, it is possible to guide to the gimbal angle, which is advantageous for the next attitude maneuver. Additionally, singularity avoidance/escape steering is explicitly considered by taking into account the relation between the biased state-dependent weighting (BSDW) matrix for the gimbal angular velocity input and the SGCMG steering with respect to the maneuver axis. This steering of gimbals is realized by adding to each SGCMG with bias. In the numerical analysis, we verify the effectiveness of the agile large-angle attitude maneuver by the proposed control system consisting of an SGCMG-integrated satellite model (SISM) and BSDW. In addition, the analysis shows that the convergence to the target satellite attitude is guaranteed by the optimality of the gimbal angular velocity input. Furthermore, we verify the robustness against the moment of inertia which is likely to contain an error in model identification on the ground. However, a general robustness analysis of SDRE has not been determined. Therefore, as an initial study, the true values used for updating the state quantity of the plant are set in several patterns with respect to the identification values.
4. Conclusions
In this study, we integrated a satellite and SGCMGs and designed a model with the gimbal angular velocity as input. We showed the proposed SISM and BSDW can generate optimal gimbal angular velocity input without solving inverse kinematics. As the target gimbal angle can be explicitly designed by the proposed control system, it can guide the initial gimbal angle, which is advantageous for the next mission. Numerical simulation showed that the singularity avoidance performance up to the target gimbal angle, and the guidance performance of the gimbal angle, are improved with respect to the conventional method owing to the optimality of the gimbal angular velocity input. Moreover, we showed that it is possible to perform agile attitude maneuvers considering the next mission.
Although this paper assumes that the satellite is a rigid body, robustness against external disturbances such as solar array paddles and fuel sloshing should also be evaluated. This is a task to be verified in the future. However, we demonstrated that the vibration of solar array paddles, which is not considered in the SDRE controller, can be stabilized by the state-dependent weight matrix as shown in [
21]. Therefore, even with the proposed method, it can be stabilized in the same way, and it is considered that it also has the robustness against the above disturbances.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}