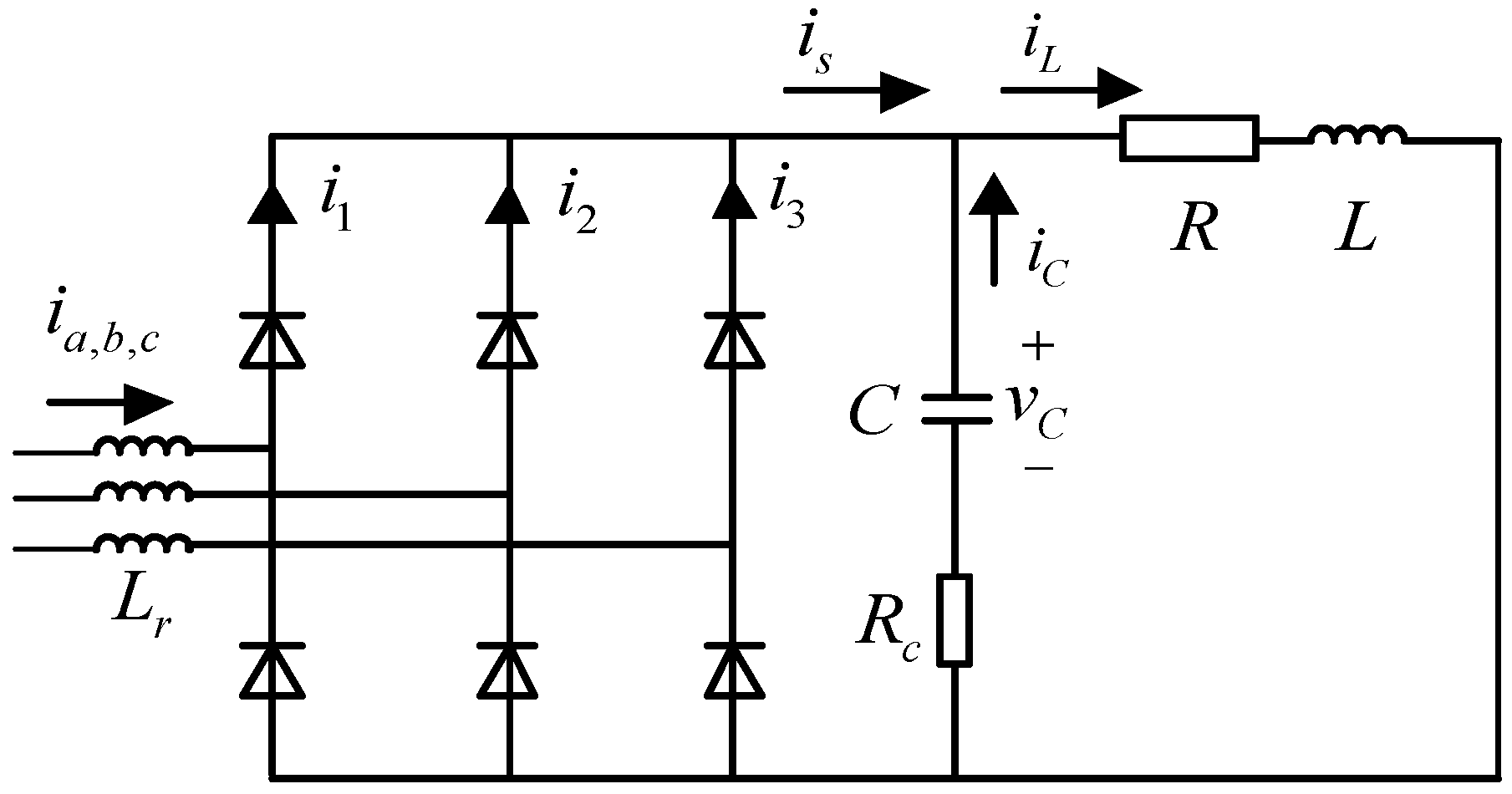
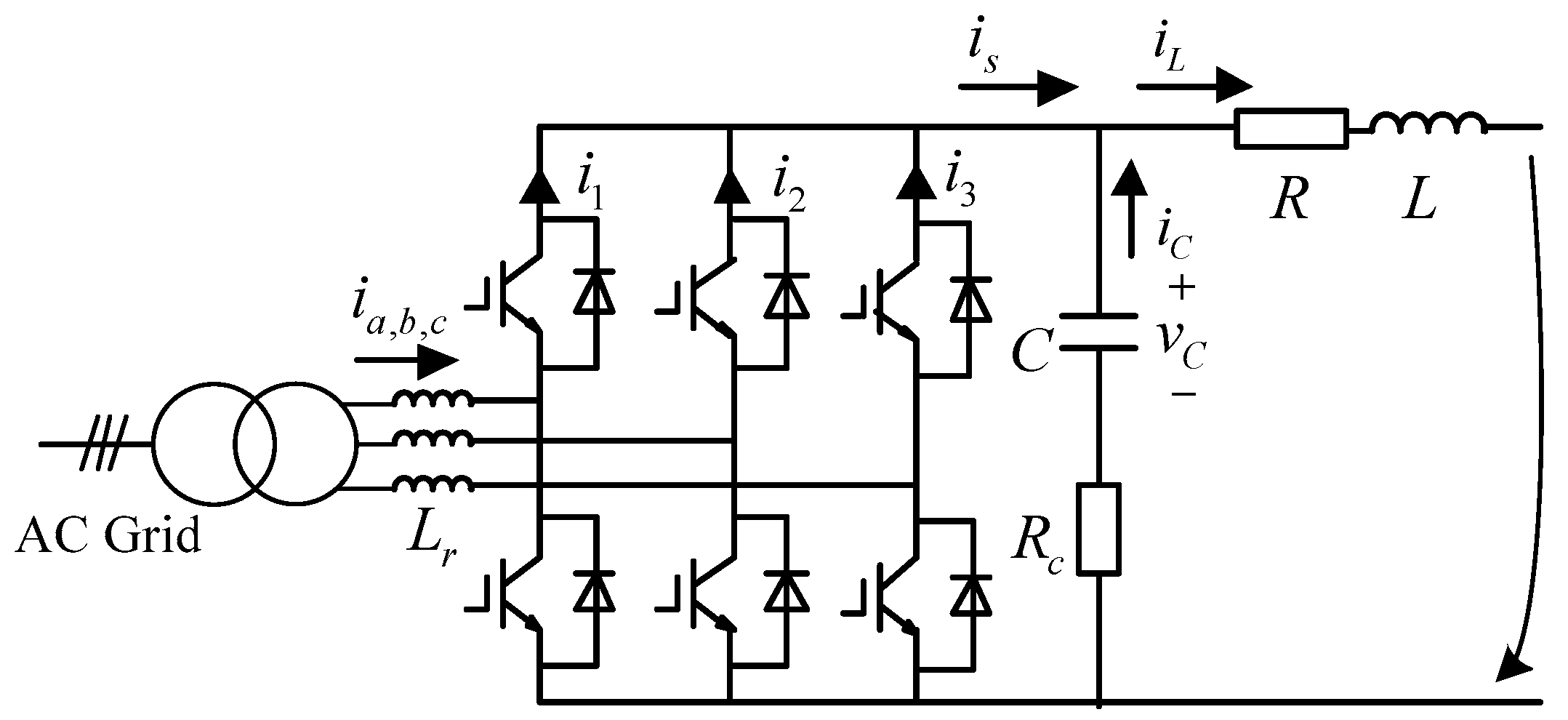
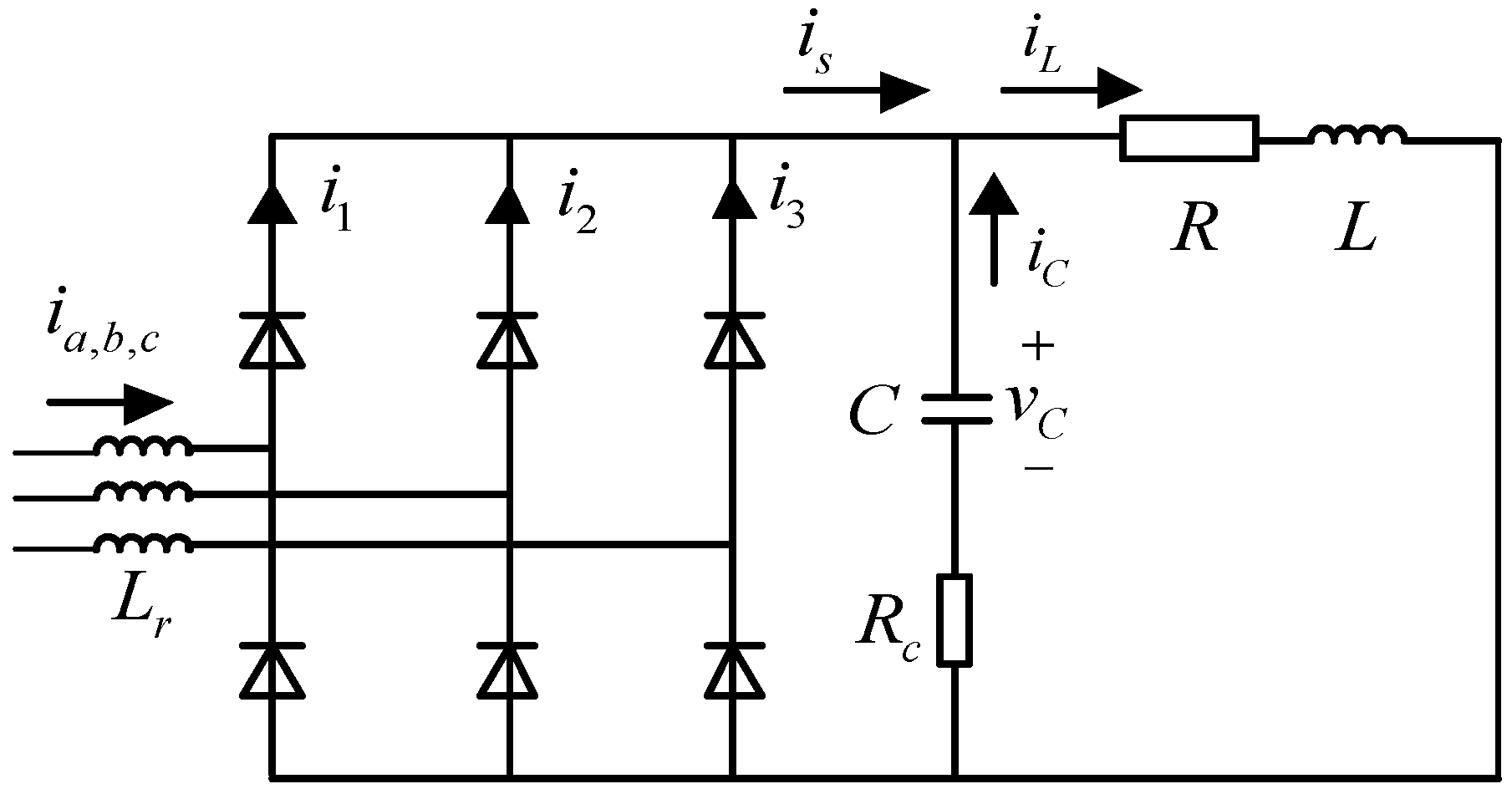
Figure 6 shows the DC short-circuit fault of the reversible converter.
R and
L are the equivalent resistance and inductance of the DC line, and the value of
R and
L varies according to the position of the short-circuit point from the converter DC output.
C is the DC capacitor of the converter.
Lr is the AC filter inductance.
Rc is the equivalent series resistance of the DC capacitor
C. It can be seen that it is a complex nonlinear circuit when a DC short-circuit fault occurs. The whole period can be divided into the following three stages [
29].
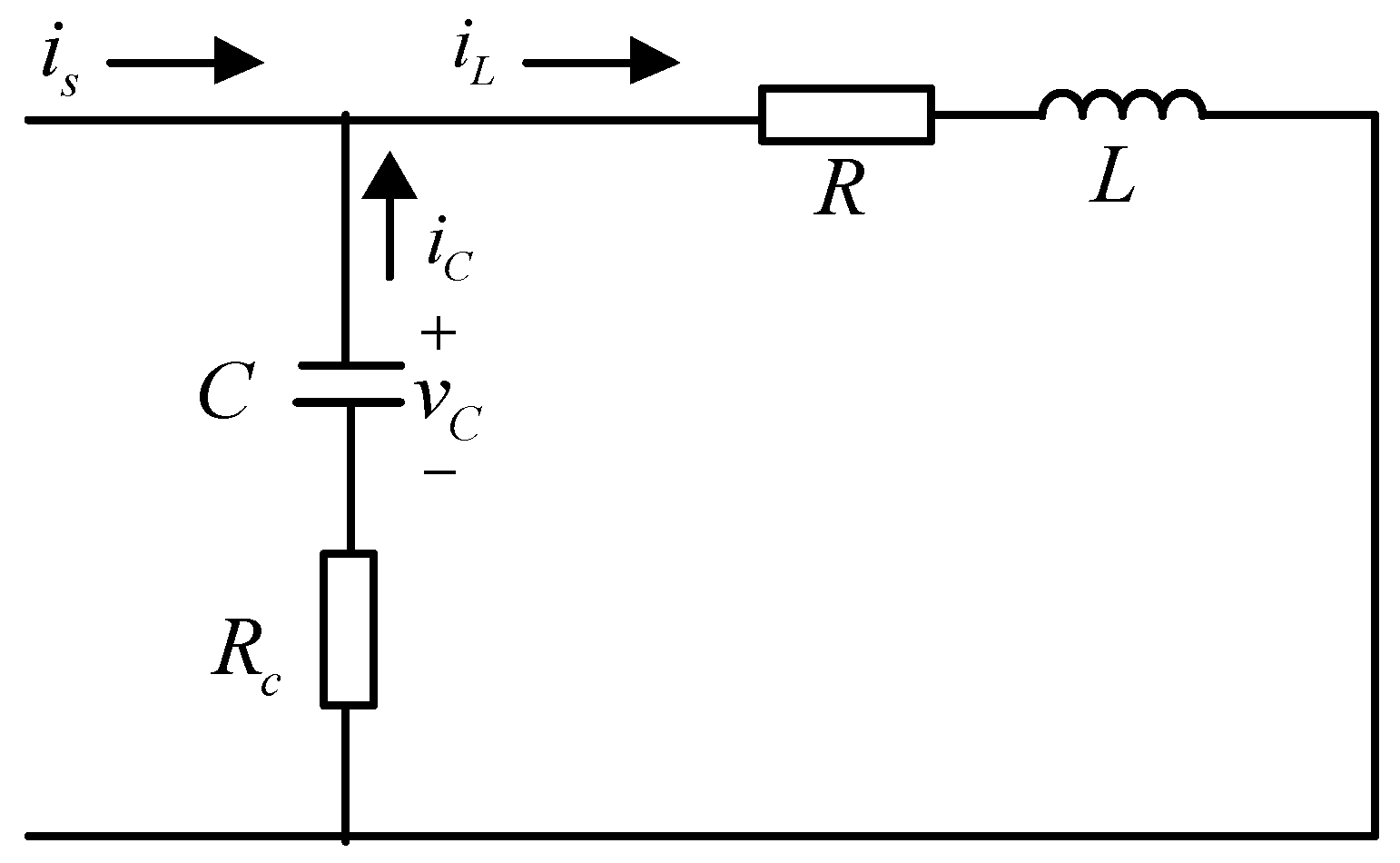
4.1. Stage of Resistance-Inductance-Capacitor (RLC) Second-Order Response
In this stage, the DC short-circuit fault occurs instantly, the capacitor
C discharges quickly, and the DC voltage drops quickly from the initial value to zero. The DC fault current correspondingly rises rapidly. During this period, (
R +
Rc),
L and
C constitute an Resistance-Inductance-Capacitor (RLC) series second-order circuit. The
C and
L have initial values when the DC short-circuit fault occurs. Due to the presence of the AC inductor
Lr, the three-phase AC current cannot be mutated, but flows through the six anti-parallel diodes, so there is an external excitation current to the second-order RLC circuit. As shown in
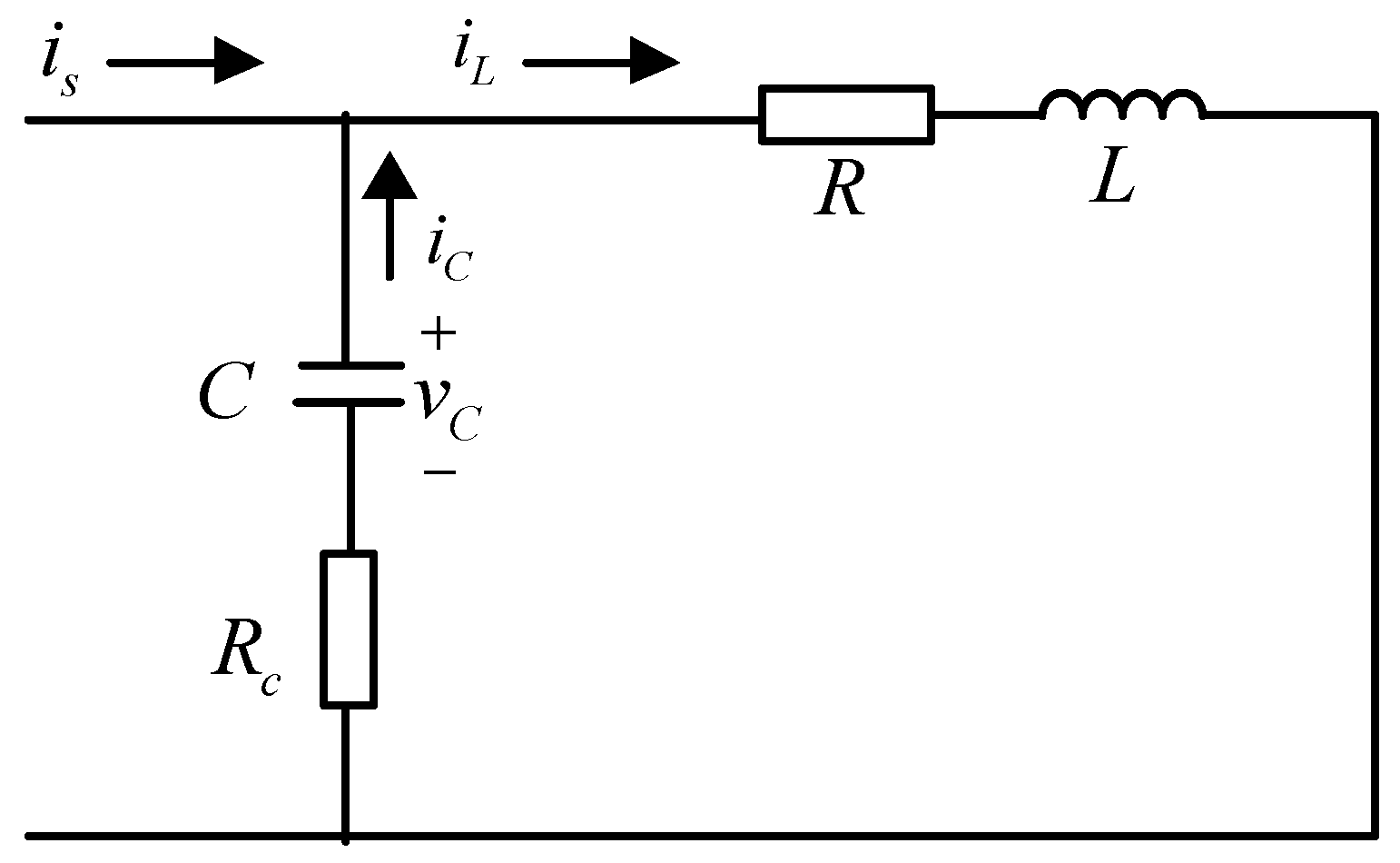
Figure 7, this stage can be seen as a full response (including zero-input response and zero-state response) process of the RLC series circuit.
Zero input response process: Regardless of the influence of the AC system (without considering the
is), it is the zero-input response process of the RLC second-order circuit. From Kirchhoff Voltage Laws (KVL):
According to the relationship of (R + Rc) and , Equation (6) may have different solutions, considering R and Rc are small, this paper only analyses .
Assume that the short circuit fault occurs at moment
t0, the initial condition is
vc(
t0) =
V0,
iL(
t0) =
I0. The circuit is in the oscillation discharge process and, from Equation (6), the zero-input response components of the DC side voltage and current after fault are as follows:
From Equation (7), when
C discharges to zero, that is,
vc = 0, the instant time is
Substituting Equation (9) into Equation (8):
Generally, when a metal short-circuit fault occurs in the DC line,
is far smaller than 1/
LC, It can be assumed that
, that is, the zero-input response component of the DC inductor current can be reduced to
Making
; then Equation (11) becomes
Zero state response process: As shown in
Figure 7, assume that there is no initial value on
C and
L. The current supplied to the DC side by the AC system is regarded as a constant value
is. At this moment, it can be considered that the RLC second-order circuit is in the process of zero-state response, and from Kirchhoff Current Laws (KCL),
Equation (13) can be solved the same way as calculating the zero-state response. The zero-state response of the DC inductor current can be obtained as
where the
,
,
is the same as in Equation (8).
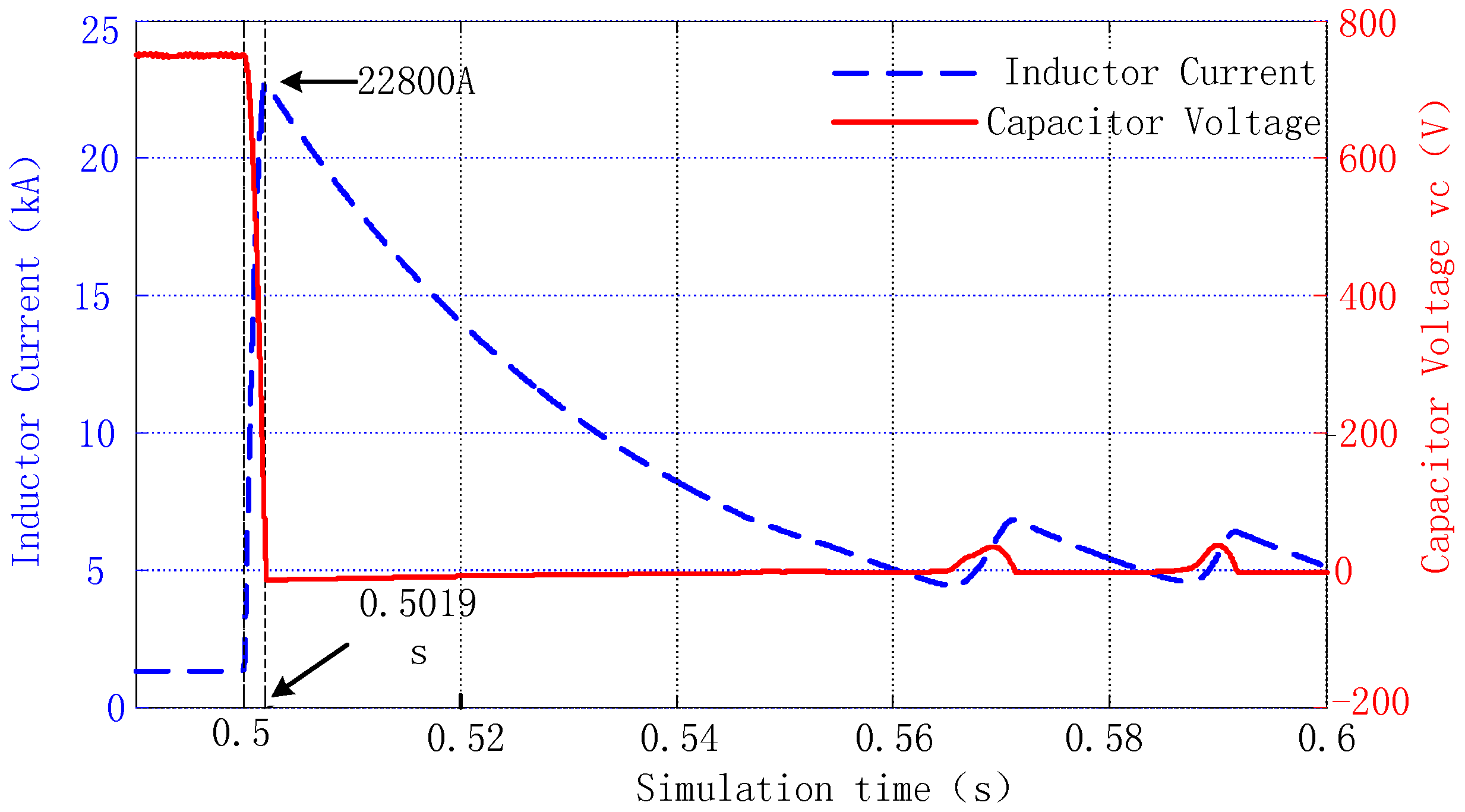
The DC inductor current in this stage is the sum of the zero-input response component and the zero-state response component from Equations (12) and (14), that is
From Equations (12), (14) and (15), it can be seen that the DC inductor current iL is composed of two parts in this stage. Since the zero-input response component is of a large proportion, when the zero-input response component reaches its peak value, the total DC inductor current also reaches the peak value, and the following conclusions can be obtained: When a DC short-circuit fault occurs, the larger the initial DC voltage V0 of C and the initial current I0 of L are, the higher the peak value of the DC inductor will be. When the initial values of DC voltage and DC inductor current are constant, the peak current of the DC inductor will increase with the increase of DC capacity C, but decrease with the decrease of DC line inductance L. This is because, under a certain DC voltage, the larger the capacitance value is, the more electric field energy can be released by the capacitor C after the short-circuit fault, and the more electromagnetic energy stored in the inductor, the larger the DC inductor current peak value can reach. The smaller the inductance value is, the greater the current required to store the same energy, and the larger the current is, the greater the total inductor current peak value will be.
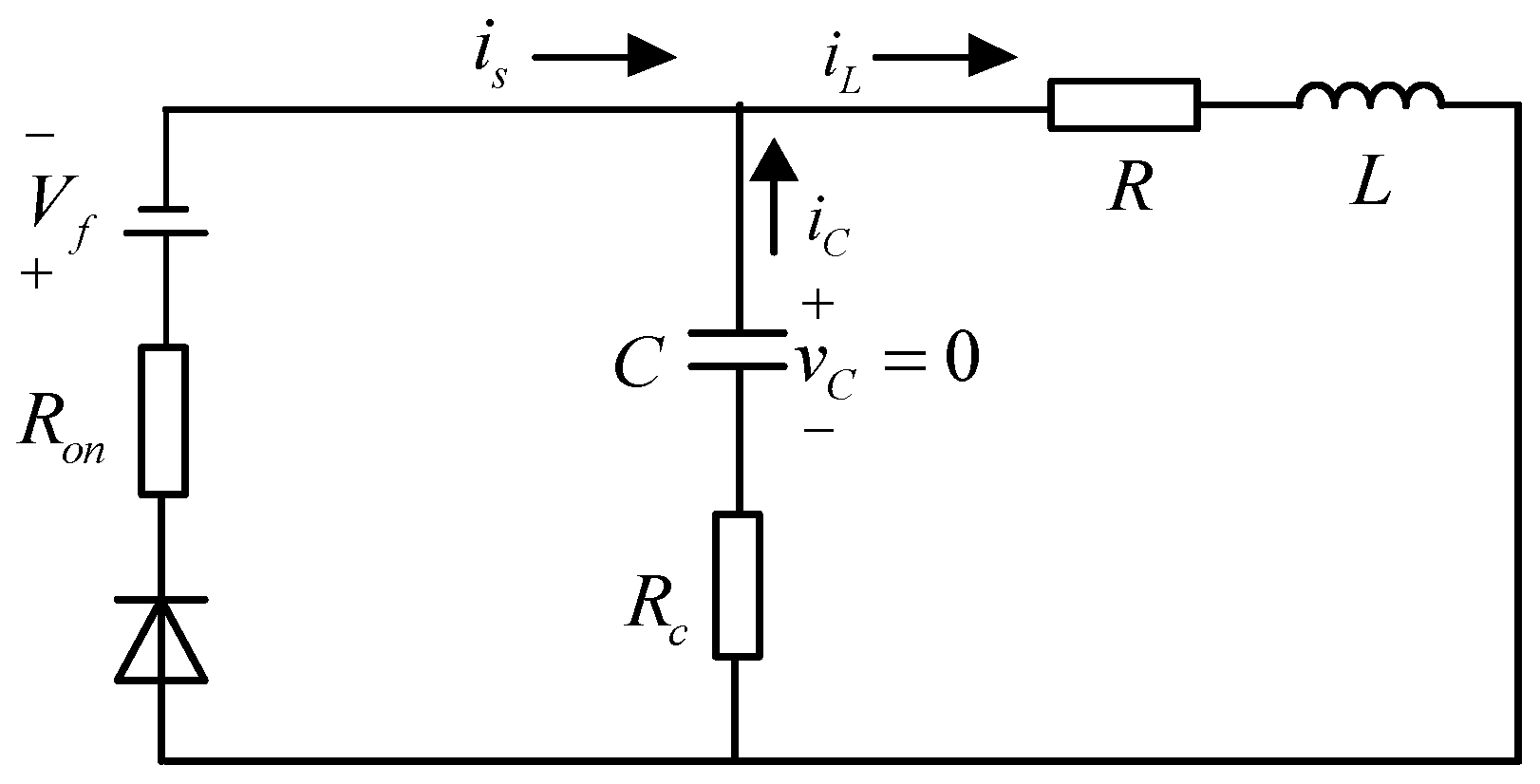
4.2. Stage of Resistance-Inductance-Diode (RLD) First-Order Response
This stage begins with the capacitor DC voltage falling to zero, and continues until the capacitor is recharged. When
vc > 0, the capacitor discharges and the current flows through the line impedance. With the capacitor discharge, DC voltage
vc will decrease. When
vc drops to zero, that is moment
t1, the inductor begins to discharge, and the fault current will flow through the anti-parallel diodes of the three-phase bridge, assuming that the initial condition is
iL(
t1) =
I0′. The equivalent circuit is shown in
Figure 8, the
Ron is the total equivalent internal resistance of the six anti-parallel diodes, and
Vf is the their total turn-on voltage drop.
At this moment, the circuit becomes a first-order circuit and the DC inductor current decreases with the exponential law as follows:
This process is the most dangerous time for the diodes, because there is a large inductor discharge current suddenly flowing through the diodes in this period, and the diodes can be damaged instantly because of the large initial current. Therefore, the diode over-current capability should be considered in the selection of switching devices.
The time that capacitor
C discharges to zero, and the value of the short-circuit current at that time, can be simplified as
where
,
,
.
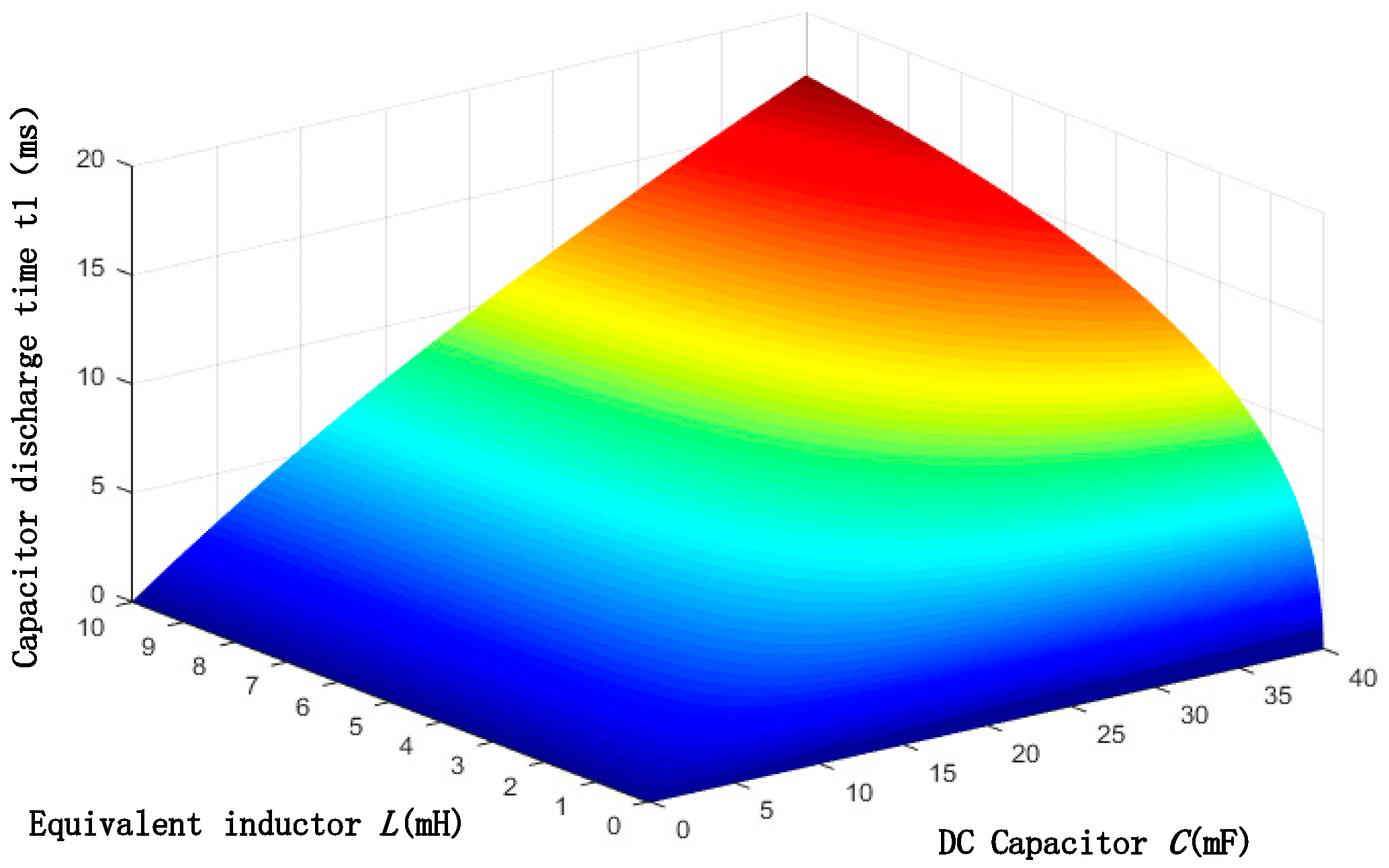
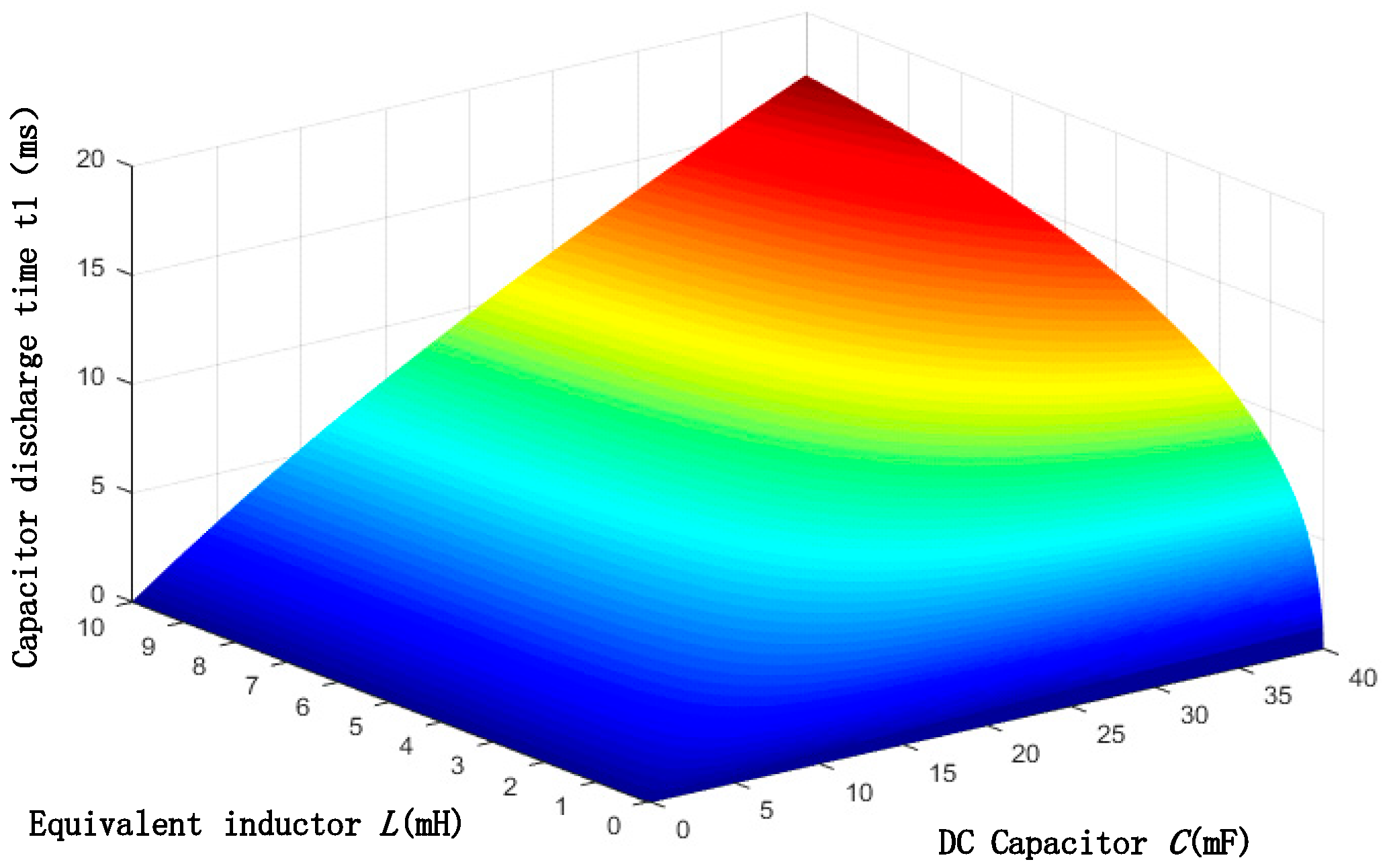
From Equation (17), the time of capacitor
C discharging to zero, that is, the maximum over-current time of the diode, is related to the value of
L and
C, as well as
V0 and
I0. The relationships among capacitance discharge time, inductance value, and capacitance value are shown in
Figure 9 when
V0 = 750 V, and
I0 = 1300 A. It can be seen that the capacitor discharge time will increase with the increase of the total inductance value and capacitance value.
It can be seen from Equation (18) that the inductor peak current is related to the value of
L and
C, as well as
V0,
I0 and
Is at the fault instant. The relationships among the inductor peak current, inductance value, and capacitance value are shown in
Figure 10, when
V0 = 750 V,
I0 = 1300 A, and
Is = 1800 A. It can be seen that the inductor peak current increases with the increase of the capacitance value, and decreases with the increase of the total inductance, which is in accordance with the analysis conclusions in
Section 4.1.
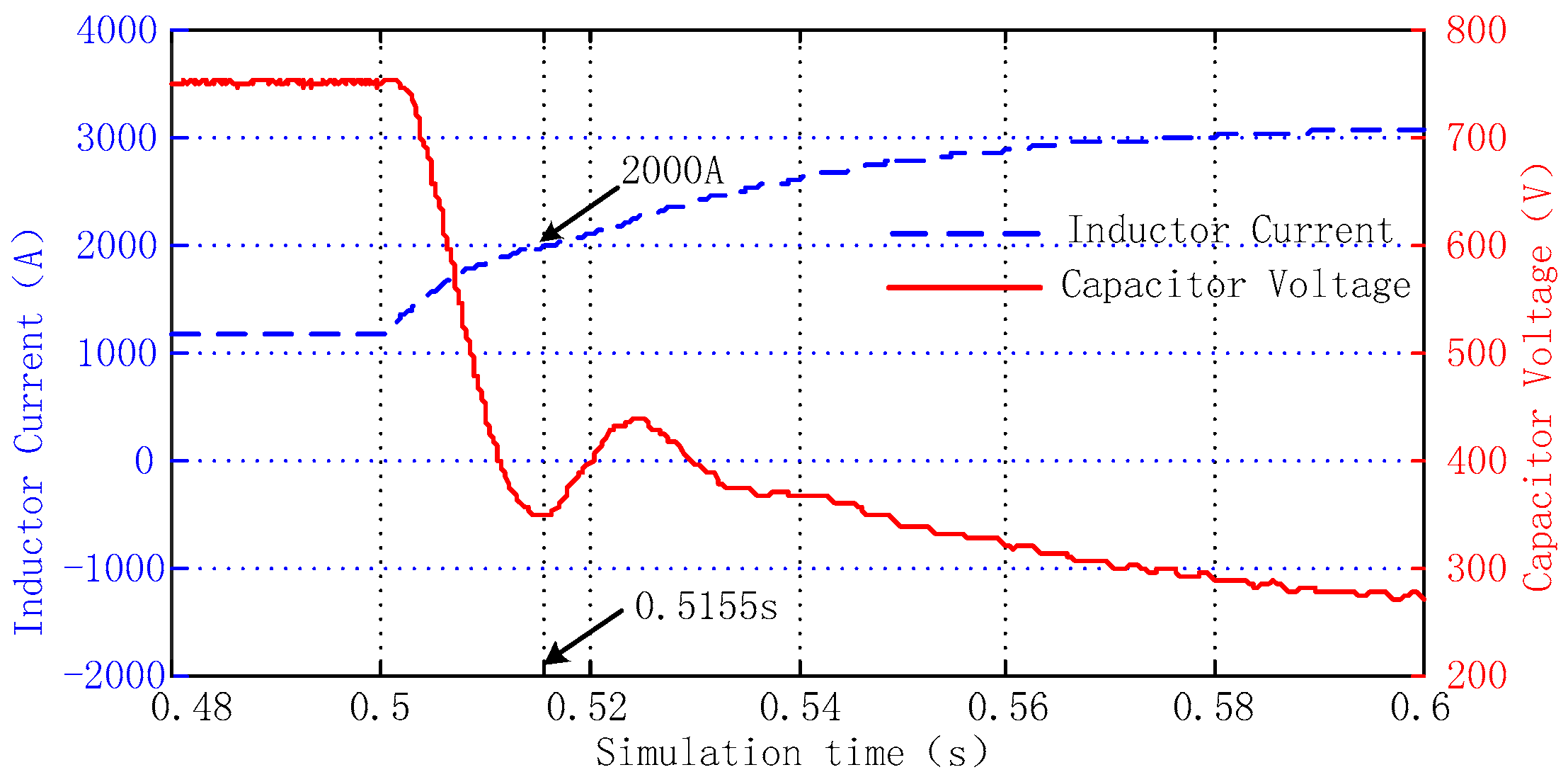
The discharge time of the DC capacitor and the inductor peak current are analyzed by the RLC second-order discharge circuit. It can be seen from Equation (16) that the peak current begins to discharge as the initial current in the RLD first-order response. The AC system provides current for the DC side through the diode in the actual first-order discharge process, so the actual DC inductor current should be the sum of the inductor discharge current and AC system supply current. As the DC inductor current decays and the AC grid current increases, the capacitor starts charging again and the DC voltage increases at the same time.
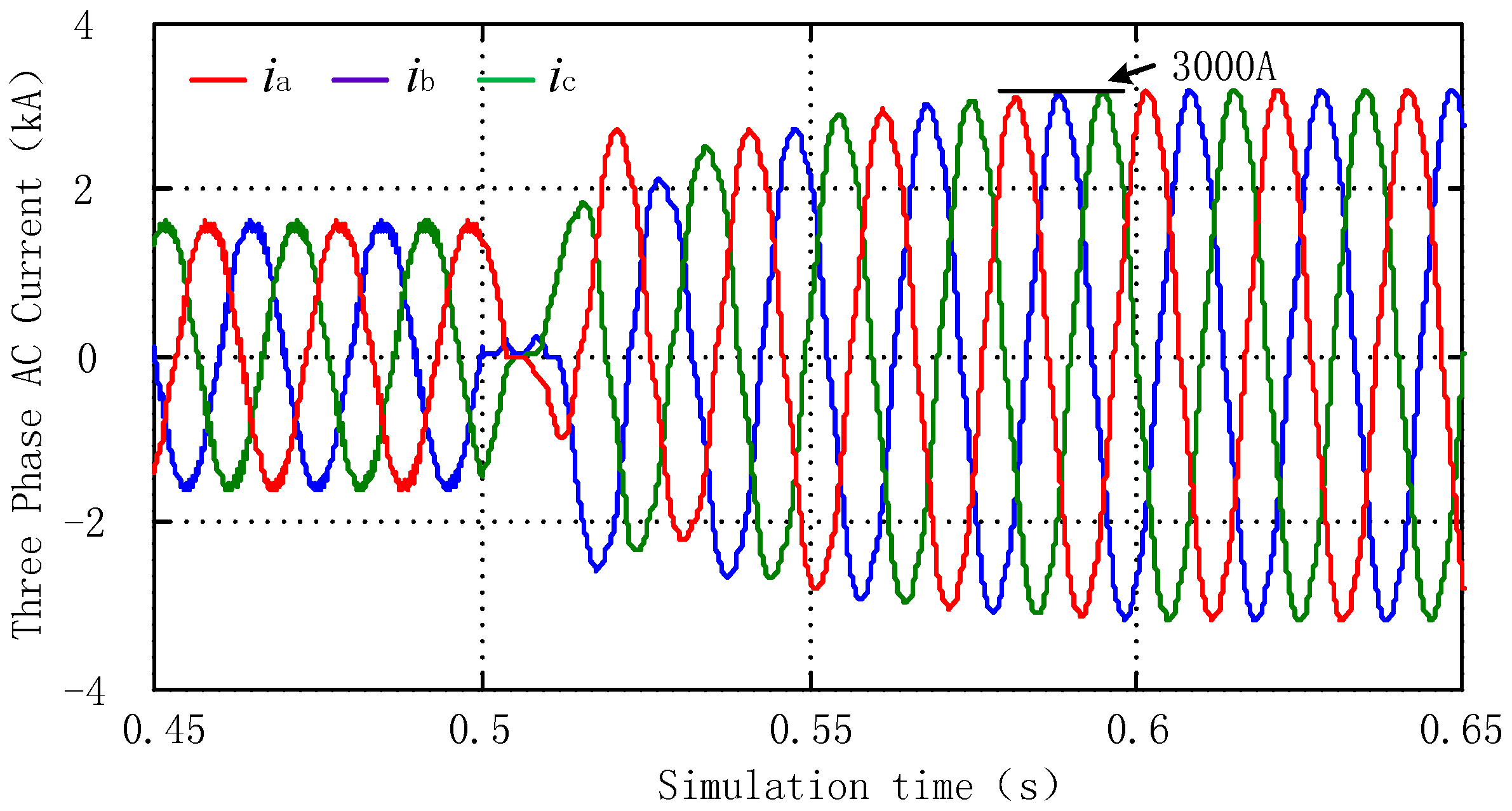
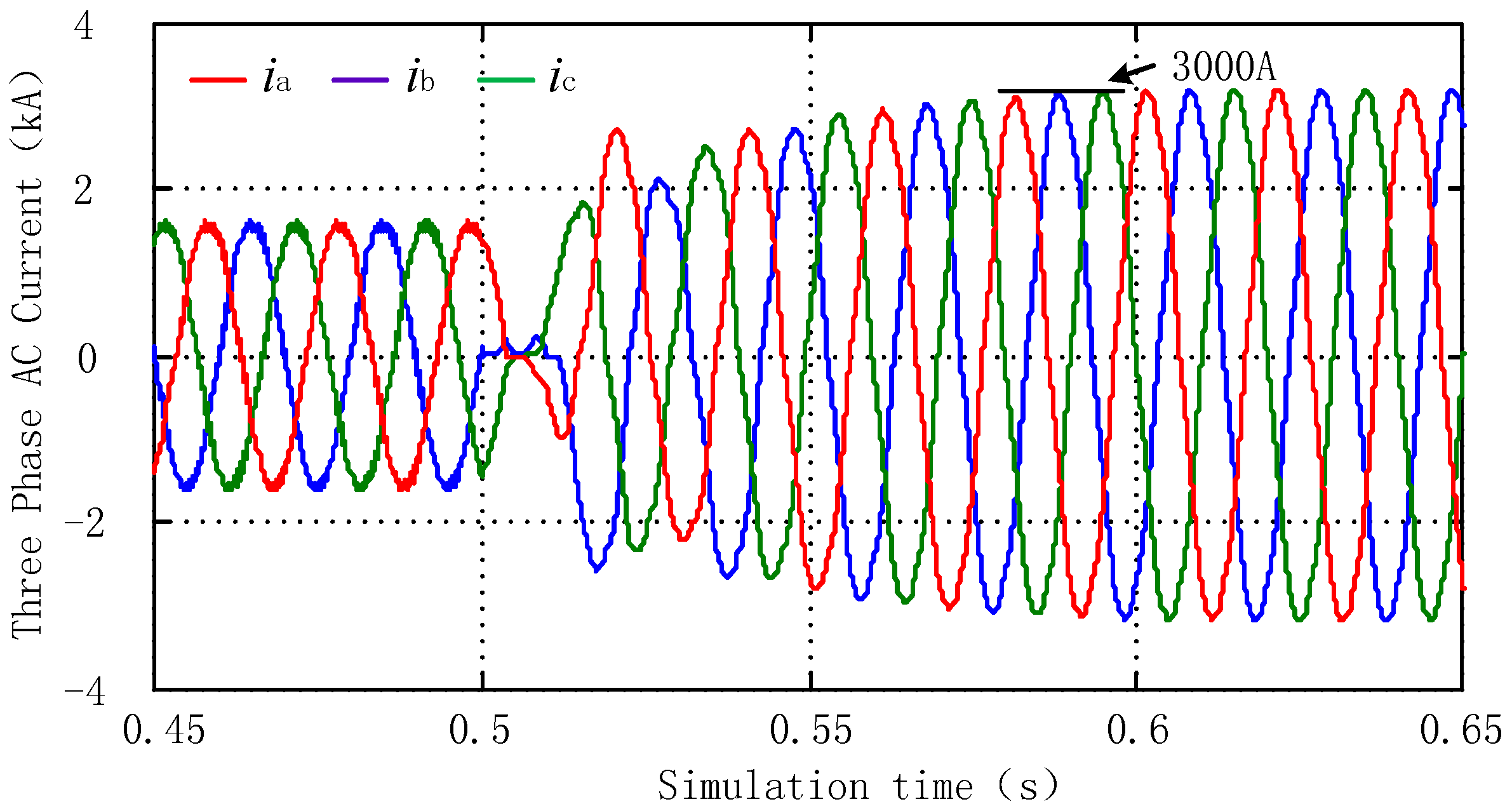
4.3. Stage of the Uncontrolled Rectification
When a short-circuit fault occurs, the reversible converter cannot be immediately separated from the AC and DC network by breakers. As a result, the anti-parallel diodes will form a three-phase bridge rectifier circuit, and the AC system will continue to deliver power to the DC side until the breakers open, as shown in
Figure 11.
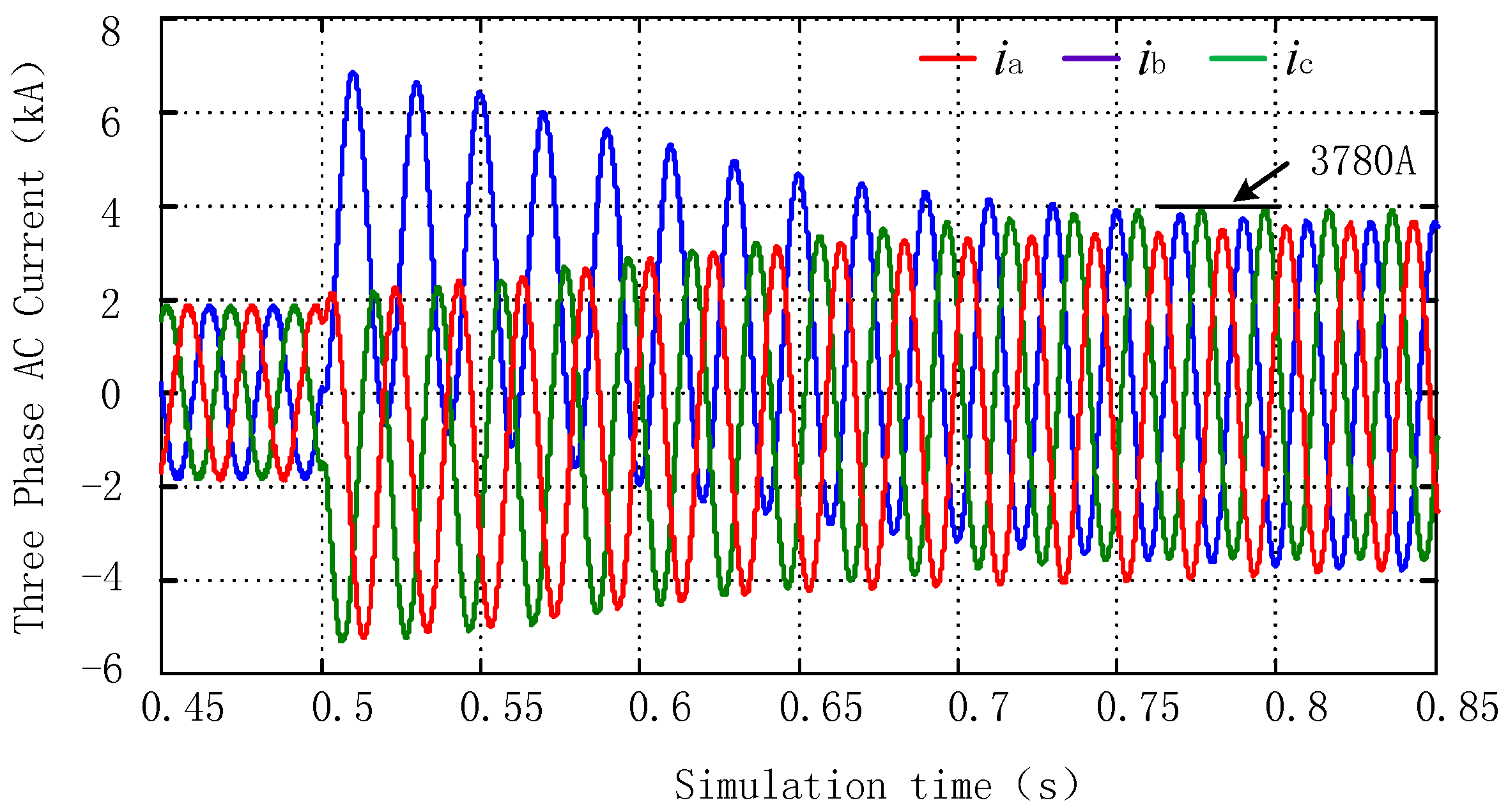
The system is equivalent to a three-phase uncontrolled rectifier working in the DC-side short-circuit state. The short-circuit current can be calculated by the transient analysis method. Assume that the phase current before short-circuit occurs is as follows:
where
is the current amplitude,
is the synchronous angular frequency,
is the phase angle, and
is the impedance angle.
Three-phase short-circuit current can be obtained:
where
Im is the short-circuit current period component amplitude,
is the impedance angle of the circuit loop,
Lr is the AC inductance, and
is the time constant of circuit loop.
where
Vn is the root-mean-square voltage of the transformer secondary.
From Equation (21), when the AC inductance Lr is constant, the short-circuit current period component amplitude Im is related to the line equivalent resistance R. The farther the location of the short-circuit point is from the reversible converter, the smaller the short-circuit current period component Im will be.
Three-phase uncontrolled rectifier transfers the short-circuit current, whose value is greater than zero, to the DC side. Thus, the short-circuit current on the DC side is as follows:















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}