
Towards a Hybrid Approach to Context Reasoning for Underwater Robots


Abstract
:
1. Introduction
2. Related Work
3. Overview of the SWARMs Context-Aware Framework for Underwater Robots
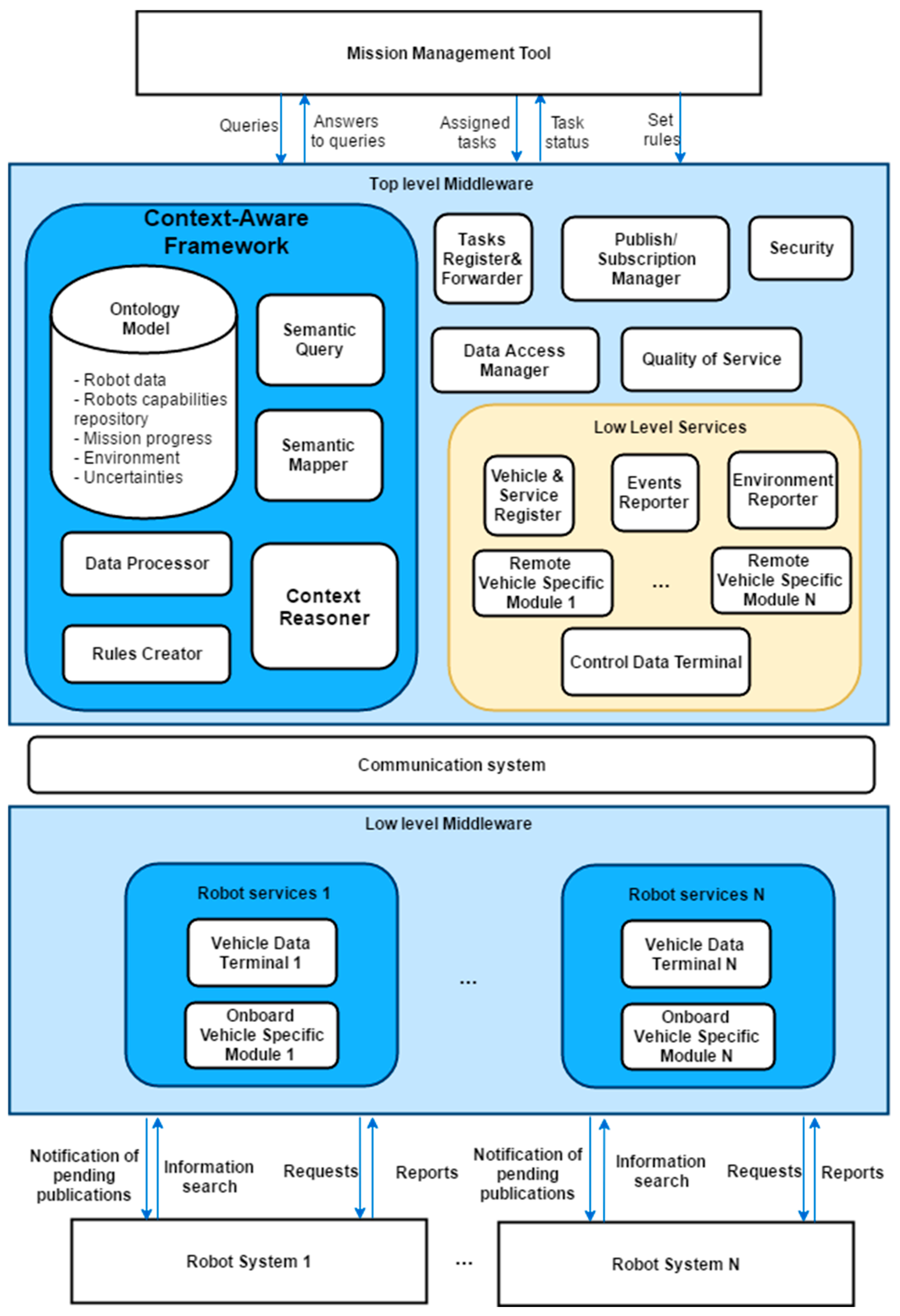
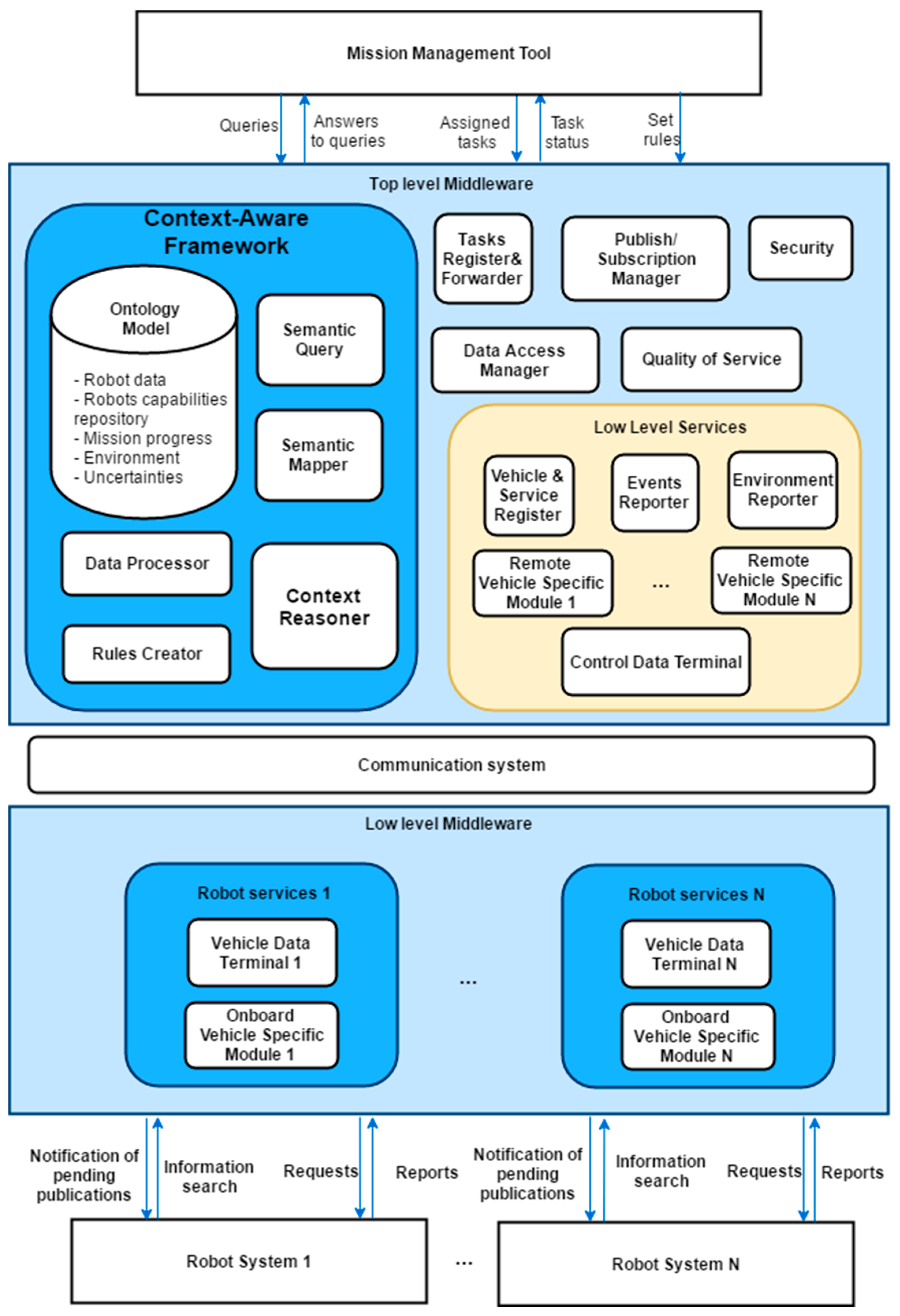
3.1. The Context-Aware Framework
- Data Processor. The extreme underwater conditions impose more challenges in the data acquisition phase. Thus, context data obtained from the environment could be uncertain. A preliminary treatment for uncertain data is needed and this treatment is provided by the data processor component. This component can pre-process the data obtained by sensors or other sensing instruments. Statistics, such as probability distribution, can be learned using machine learning algorithms in this component. Operations, such as validating values, checking inconsistencies, calculating uncertainty degrees, removing outliers, and filling in missing values, can be executed in this component.
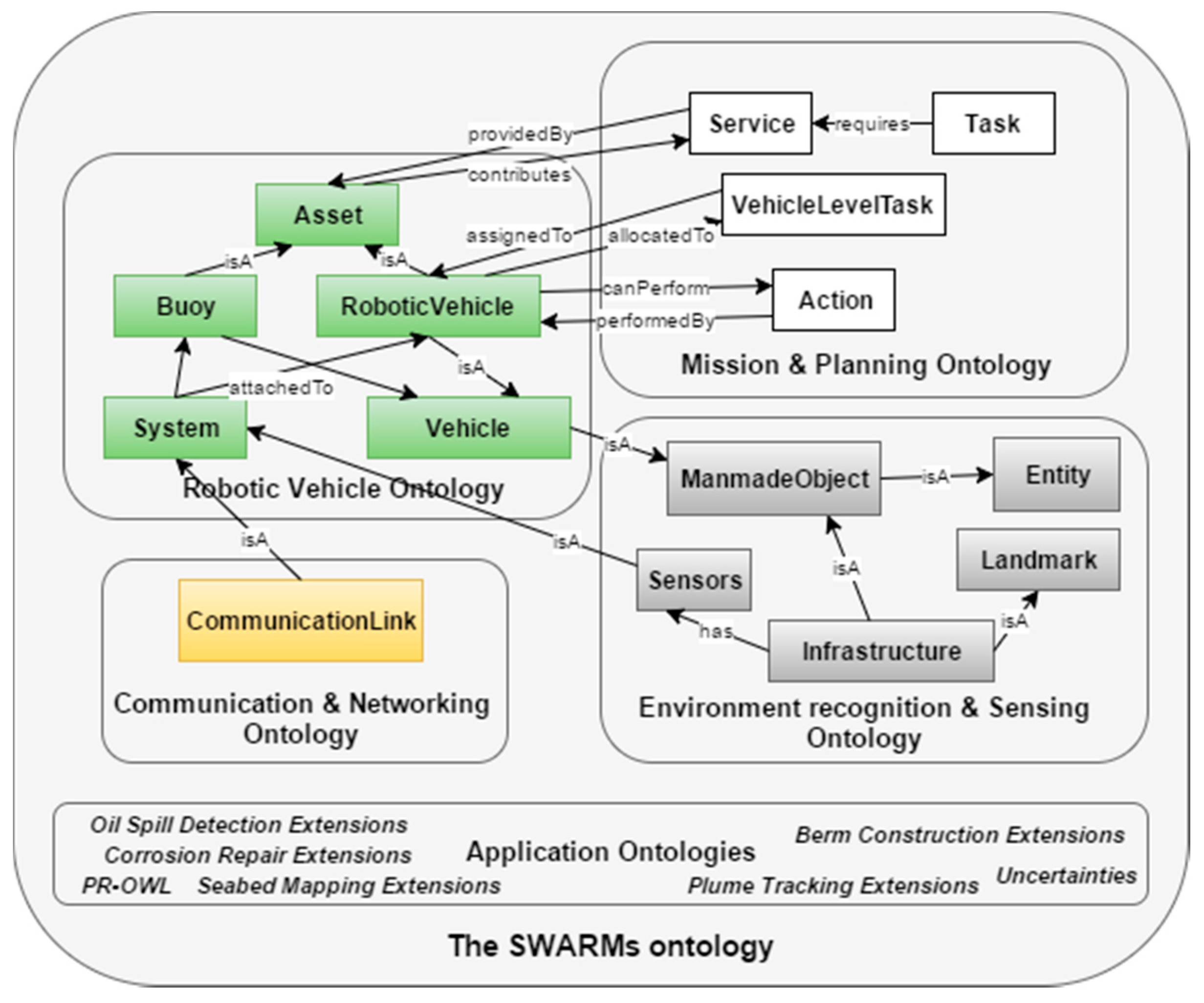
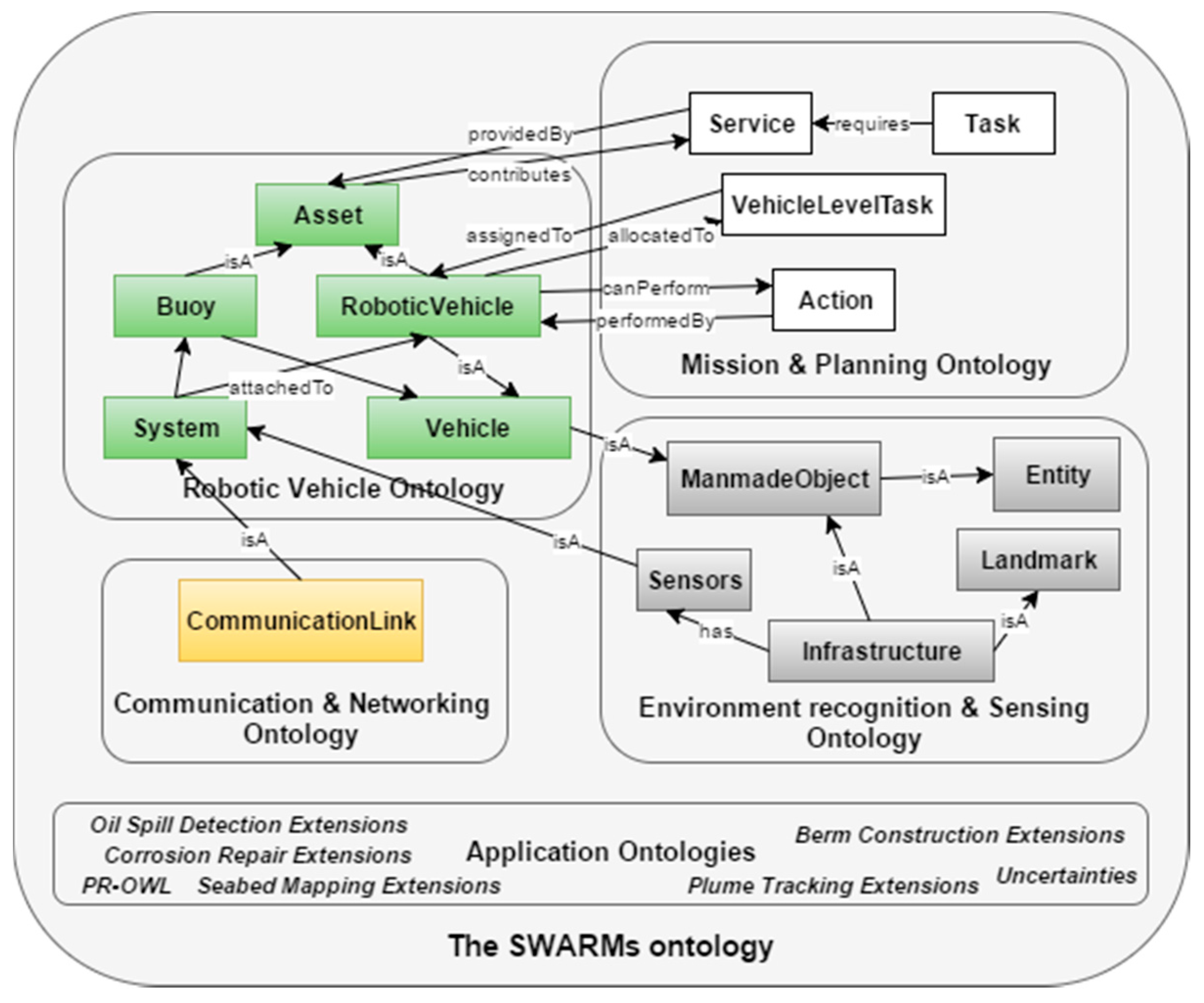
- Ontology Model. This component, acting as a semantic repository, keeps the SWARMs’ ontology and stores all data obtained as instances in the ontology model. Ontology is adopted to serve as a common information model to represent information and enable sharing, reuse, and integration of data between vehicles. The information model is structured in a hierarchical manner. The networked information model consists of three levels of ontologies: core ontology (acting as an upper-level ontology to glue all domain specific ontologies), domain-specific ontology (providing information models for different domains, e.g., mission planning, vehicles, environment, and communications), and application-specific ontology (describing information with a focus on particular applications, e.g., oil spill detection, plume tracking, berm construction). Therefore, data, including but not limited to contextual measurements, vehicle-related data, data from external sources (Global Positioning System, oceanic weather forecast, etc.), and marine experts’ knowledge, can be abstracted and formalized in an ontological format. All data can be displayed with a homogeneous view associated with the semantic content. The ontology model could annotate context uncertainties based on MEBN theories. Specifically, probability information about uncertain context can be modeled using ontology constructs defined in the PR-OWL [39] ontology. With PR-OWL classes and properties, ontology engineers could fully specify an MEBN model while maintaining compatibility with the OWL ontology language. The SWARMs ontology will be briefly introduced in Section 3.2.
- Semantic Mapper. This component plays a vital role in facilitating the transparent sharing of information. As data might be formatted in different manners pertaining to different data sources, this component aims to parse and formalize them in an ontology-compliant format. Translations from different standards, such as XML, JSON, or binary files, to ontological formations, such as Resource Description Framework (RDF) [40] or OWL, can be enabled in this component. For differently formatted data that do not comply with the SWARMs ontology, corresponding mapping files should be predefined in order to parse and map them into the common information model.
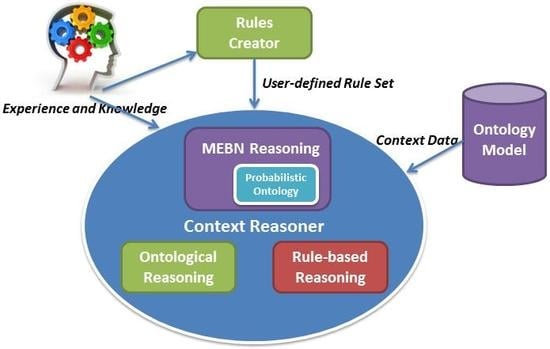
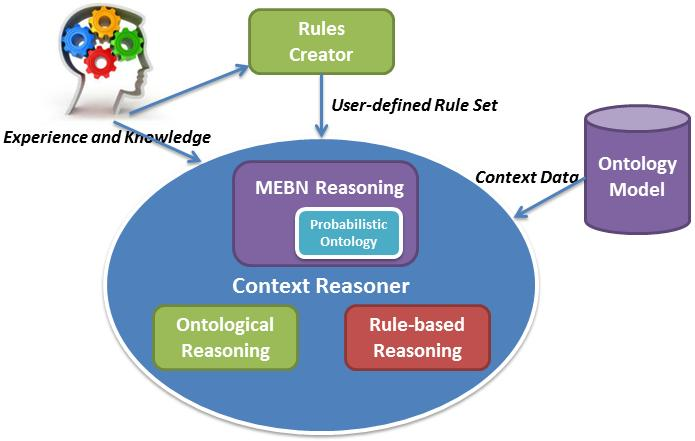
- Rules Creator. Operators or marine experts are able to define rules based on their knowledge before or during missions through this component. A set of user-defined rules can be translated into the SWRL format and inserted into the ontology model. Rules can be diverse, including restrictions or definitions for entities, regulations for evaluating data values, or specifications for relationships between entities. The rule set is very important for the context reasoner to consider when making inferences.
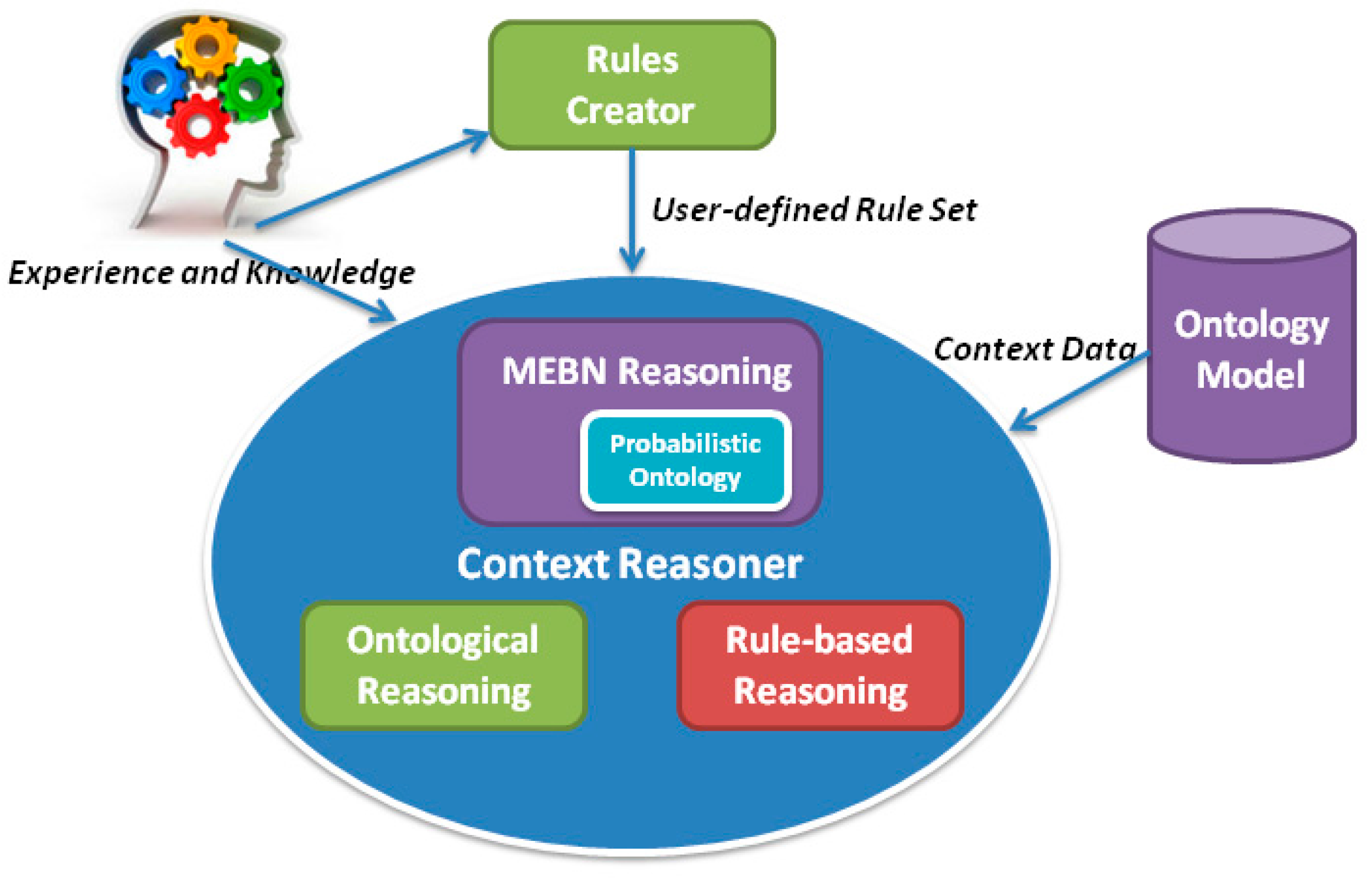
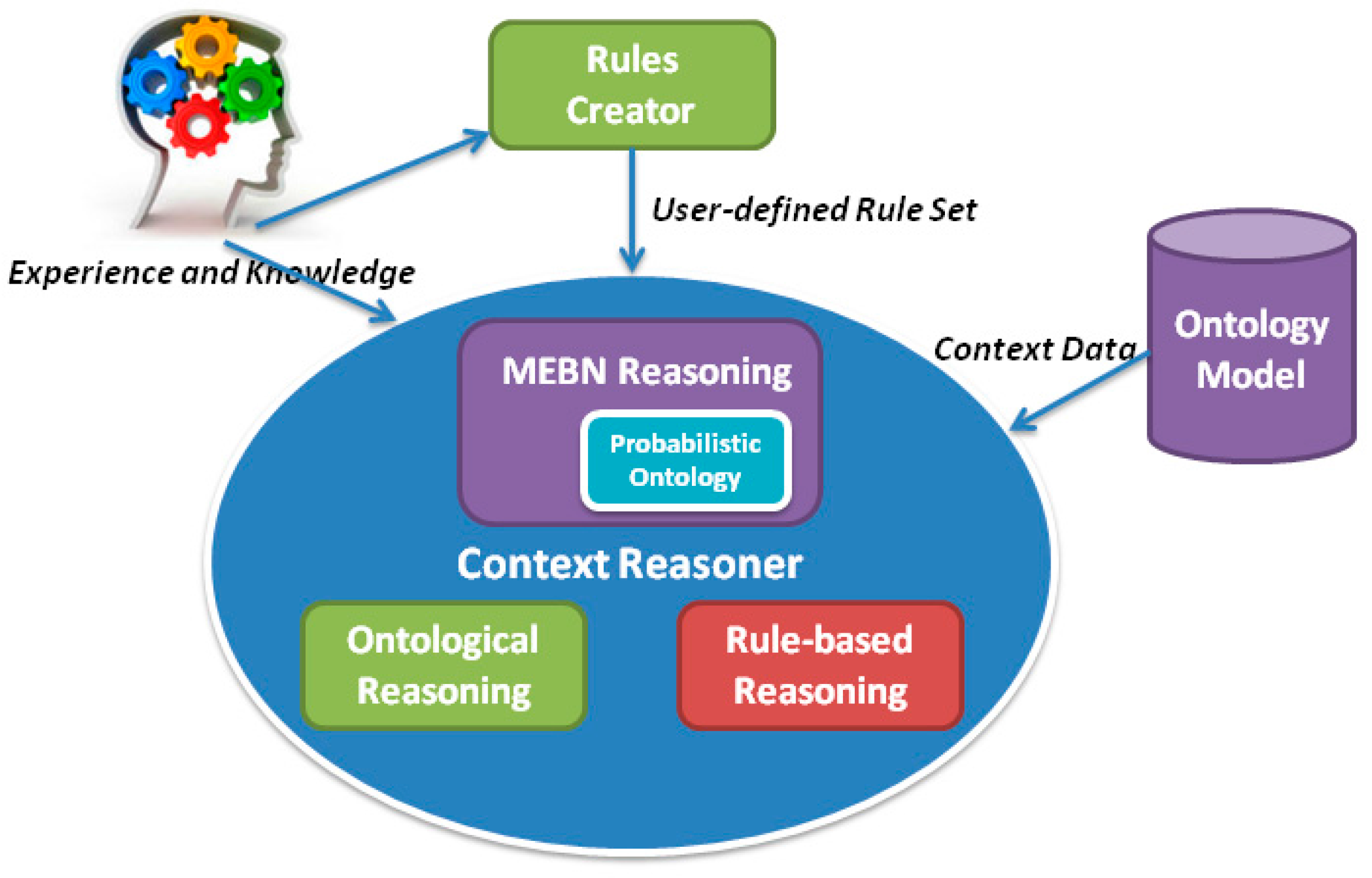
- Context Reasoner. The essential capability of this component is to derive new knowledge from available contexts stored in the ontology model. Basically, it will consult information stored in the ontology model and also take experiences and knowledge from marine experts into account. A hybrid reasoning mechanism, including the ontological, rule-based, and MEBN reasoning, is intended to be employed in this context reasoner. Specifically, the ontological reasoning enables several kinds of operations, including concept satisfiability, consistency check, class subsumption, and logic inference. The rule-based reasoning could augment the ontological reasoning in terms of logicality and human readability. The MEBN reasoning is dedicated to reasoning under uncertainties.
- Semantic Query. This component deals with any semantic query made by operators. It receives queries, calls corresponding reasoning services, and finally outputs answers. This is one of the context dissemination strategies defined in the SWARMs project. Apart from this, the SWARMs project also follows a subscribe/publish paradigm to distribute context information.
3.2. The SWARMs Ontology
4. The Hybrid Context Reasoning Mechanism
4.1. Principles of the Different Reasoning Methods
4.1.1. Ontological Reasoning
4.1.2. Rule-Based Reasoning
4.1.3. Multi-Entity Bayesian Network (MEBN) Reasoning
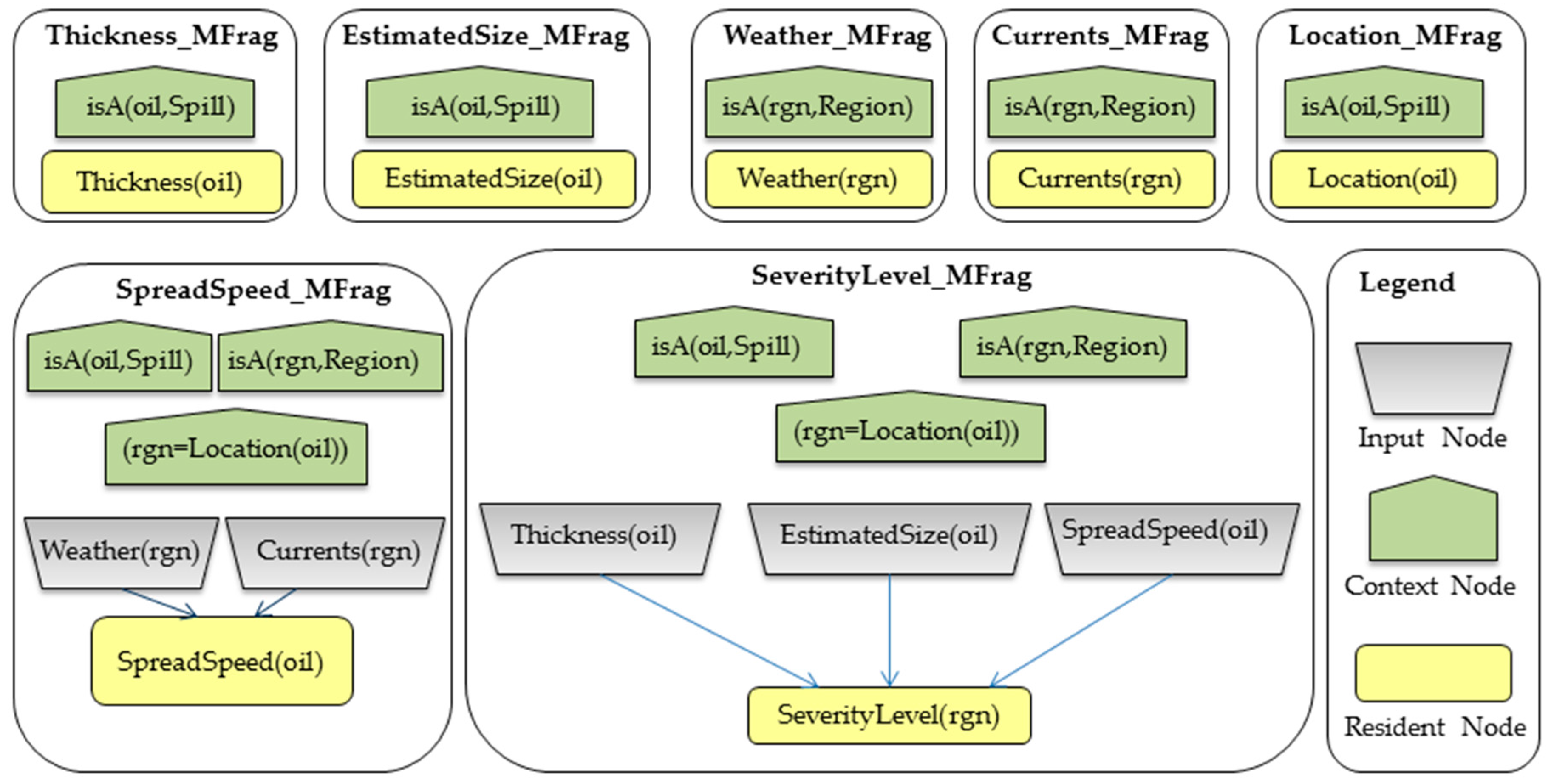
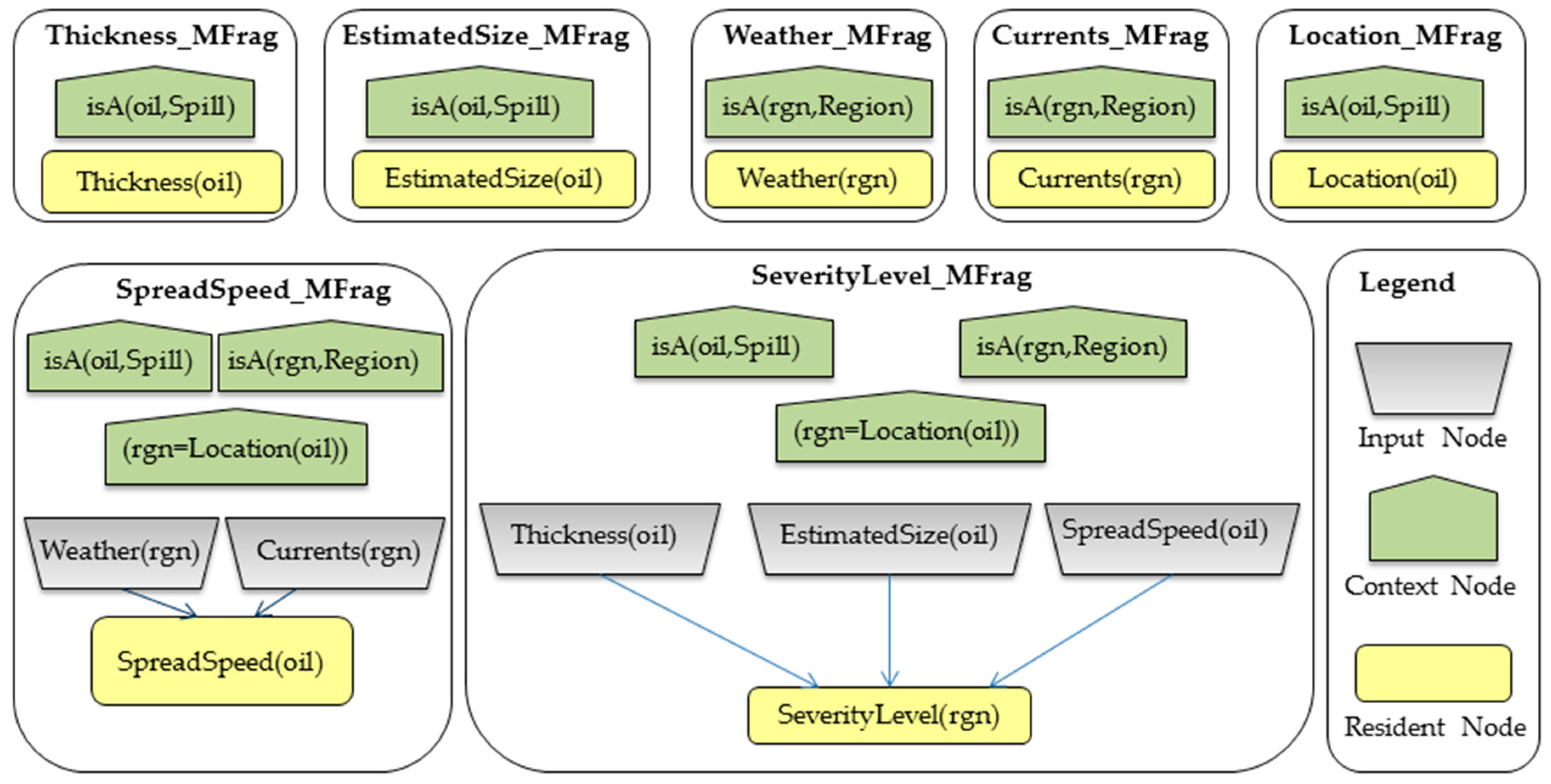
- Resident nodes. In an MFrag graph, resident nodes represent variables that have local probability distributions dependent on the values of their parents. Exactly one home MFrag is assigned to contain the complete expression of a resident node.
- Context nodes. Context nodes are Boolean nodes, including value True, False, and Absurd. The MFrag must satisfy the conditions expressed by context nodes in order to be valid.
- Input nodes. Input nodes have their distributions defined in other MFrags and they are important inputs for the definition of resident nodes.
4.2. Specifications for the Reasoning Workflow
4.2.1. Use of the Ontological Reasoning
4.2.2. Use of the Rule-Based Reasoning
4.2.3. Use of MEBN Reasoning
5. The Proof of Concept: A Case Study on Oil Spill Detection
5.1. Description of the Scenario
5.2. Application Ontology Extensions for Modeling the Scenario
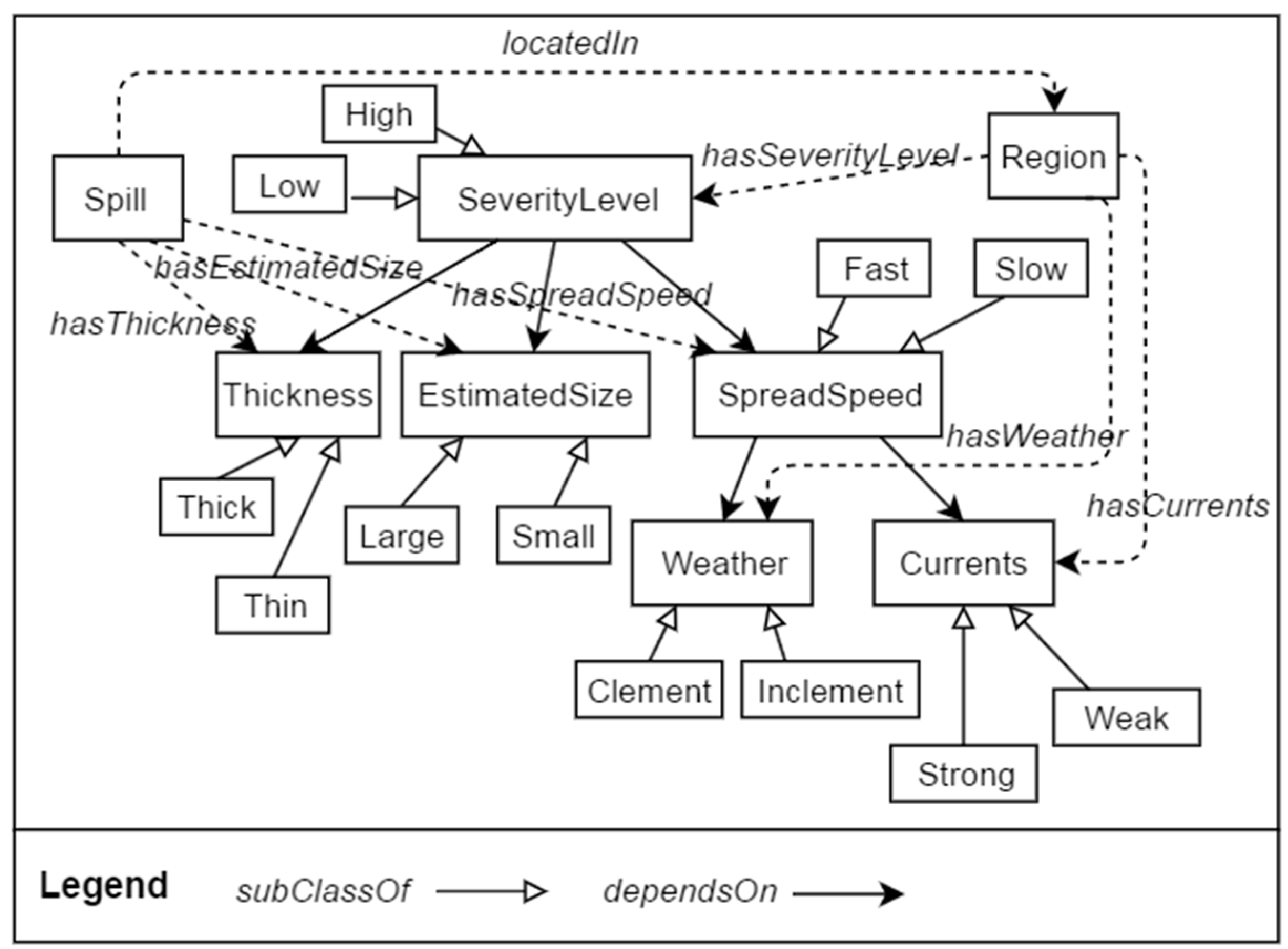
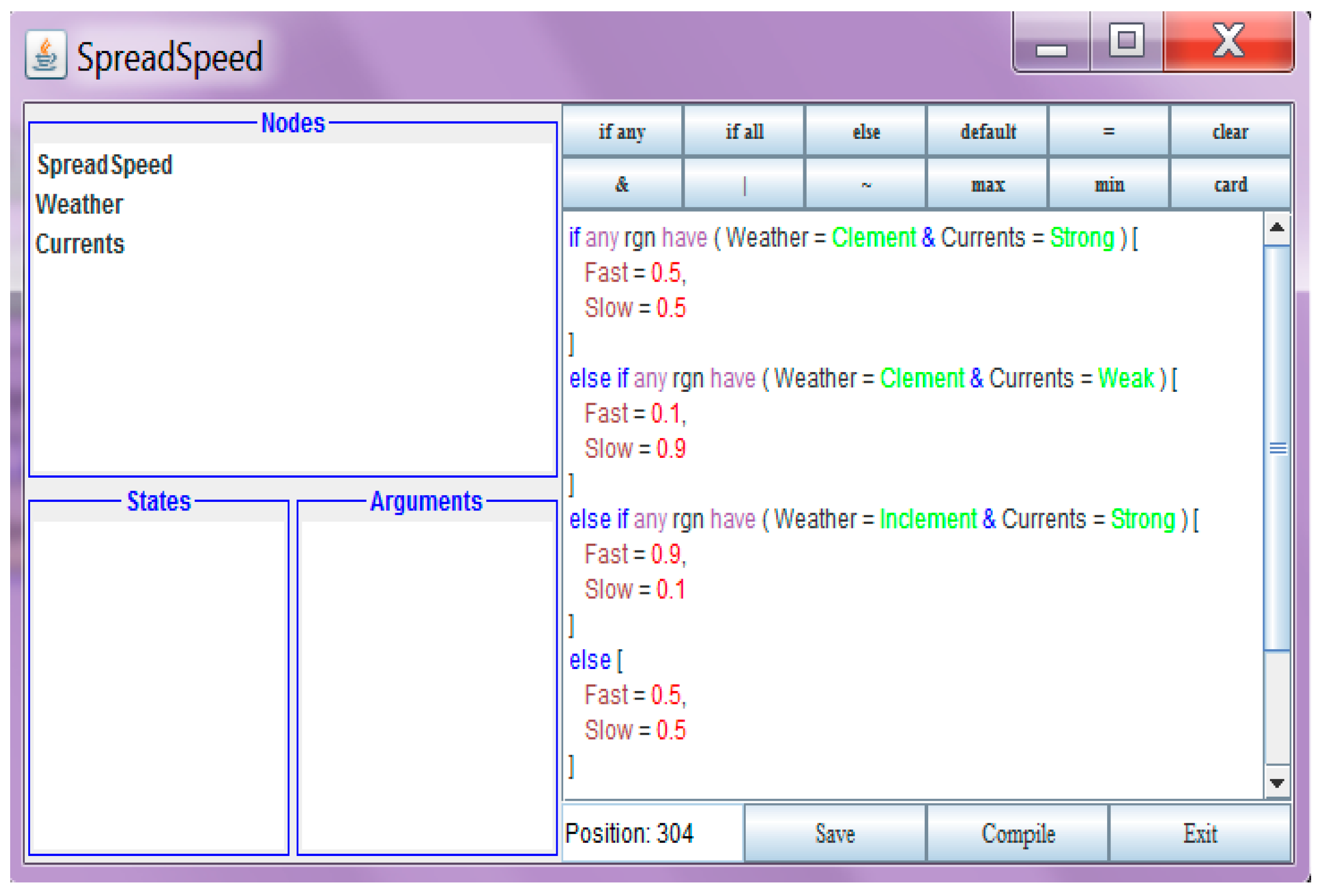
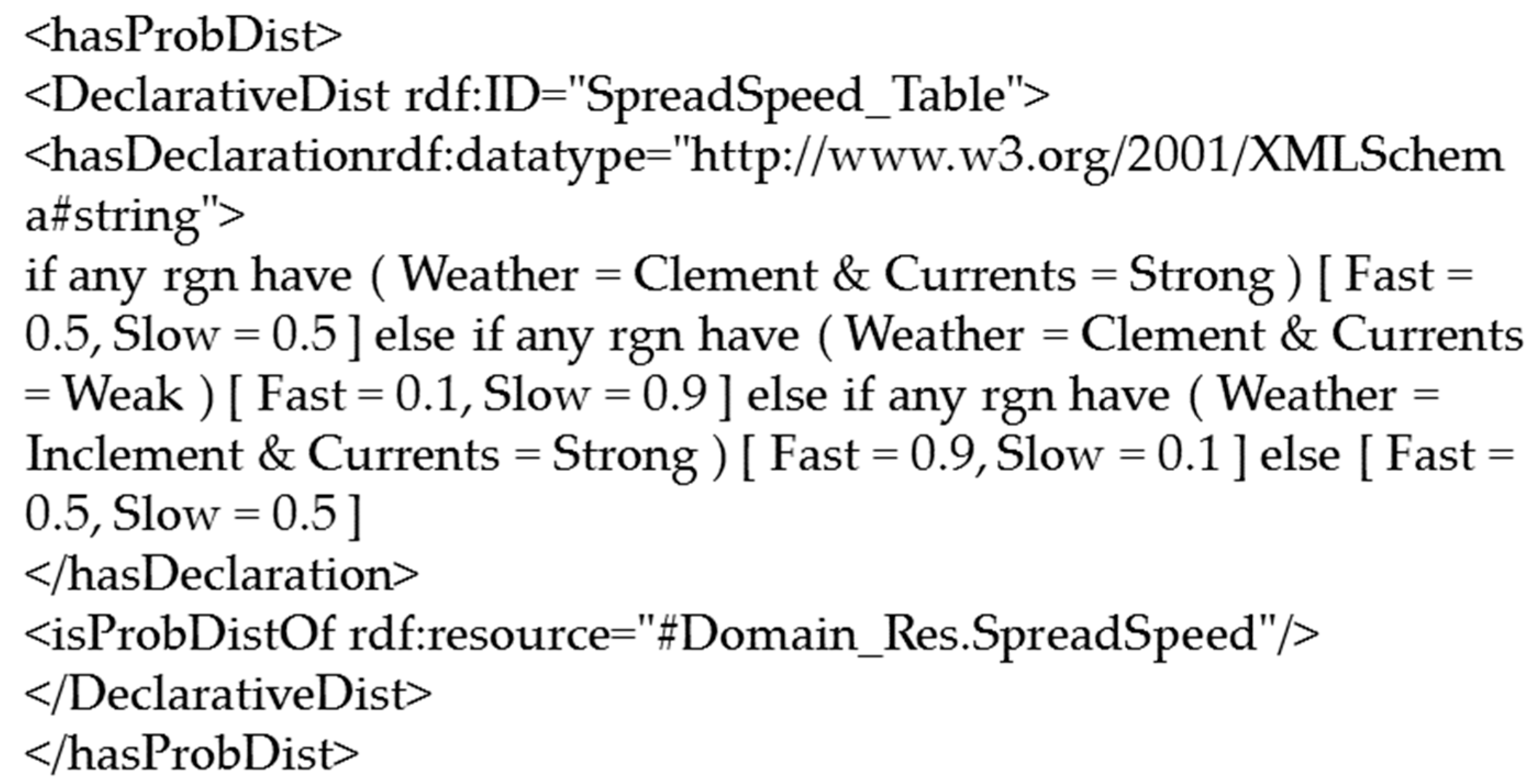
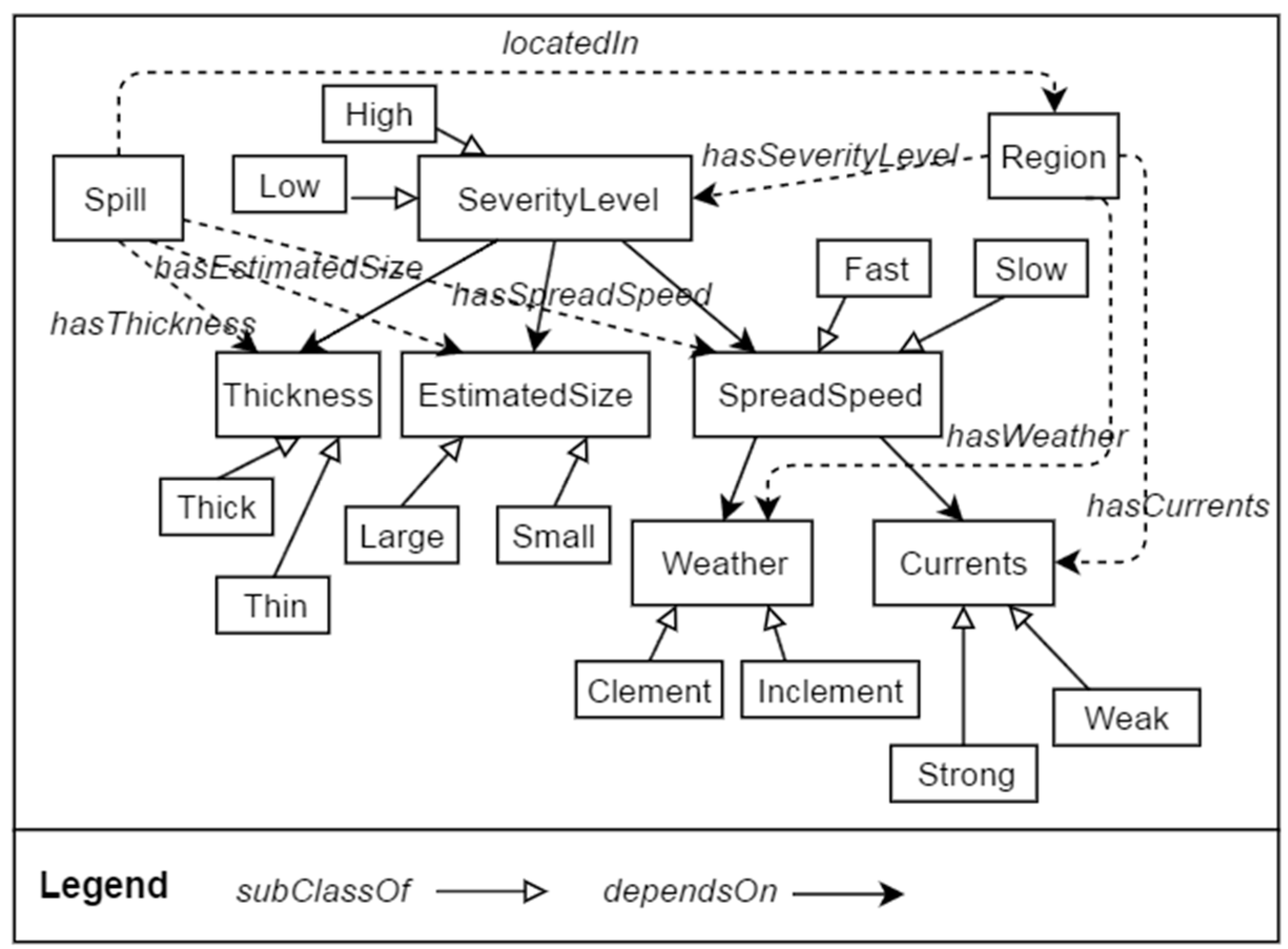
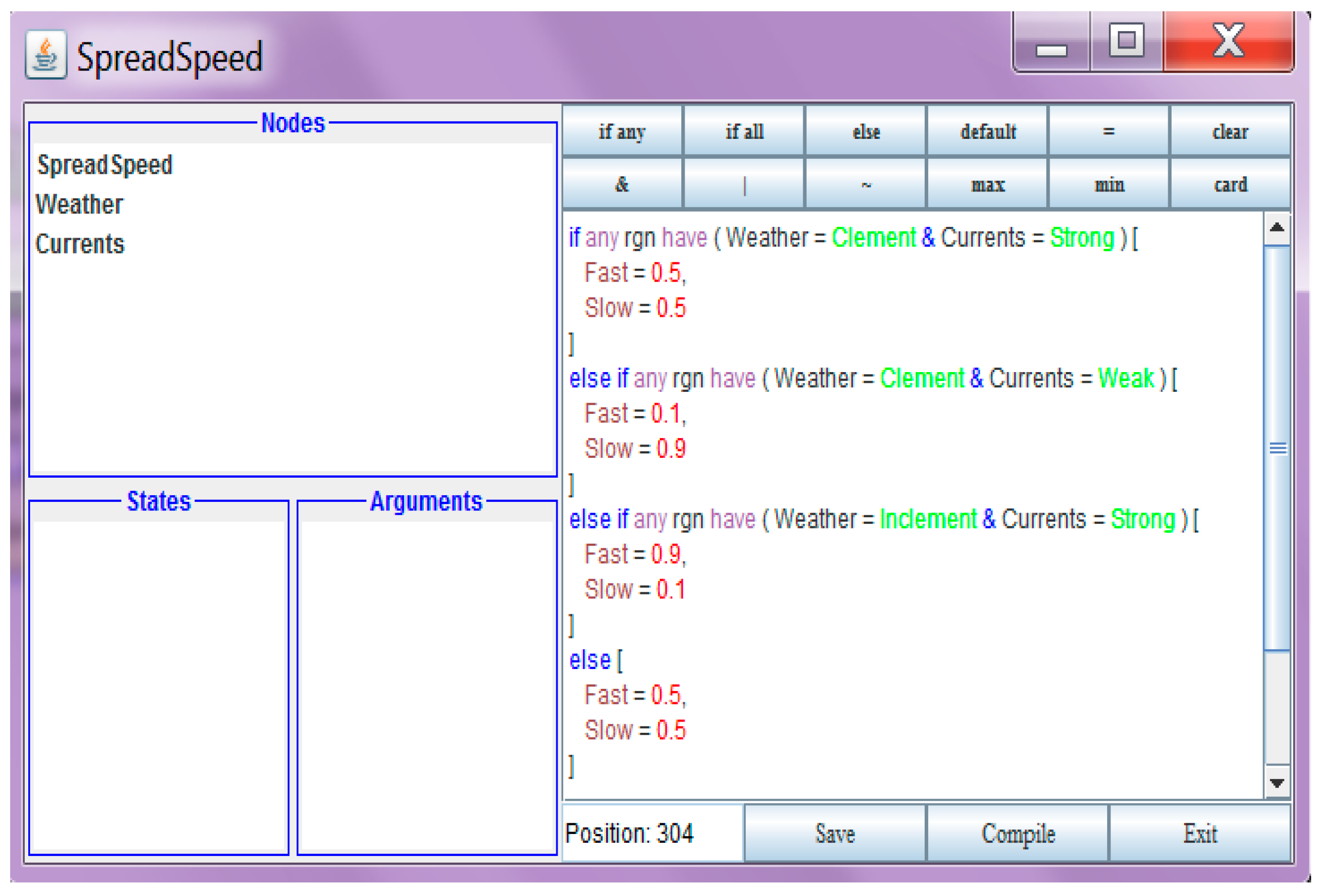
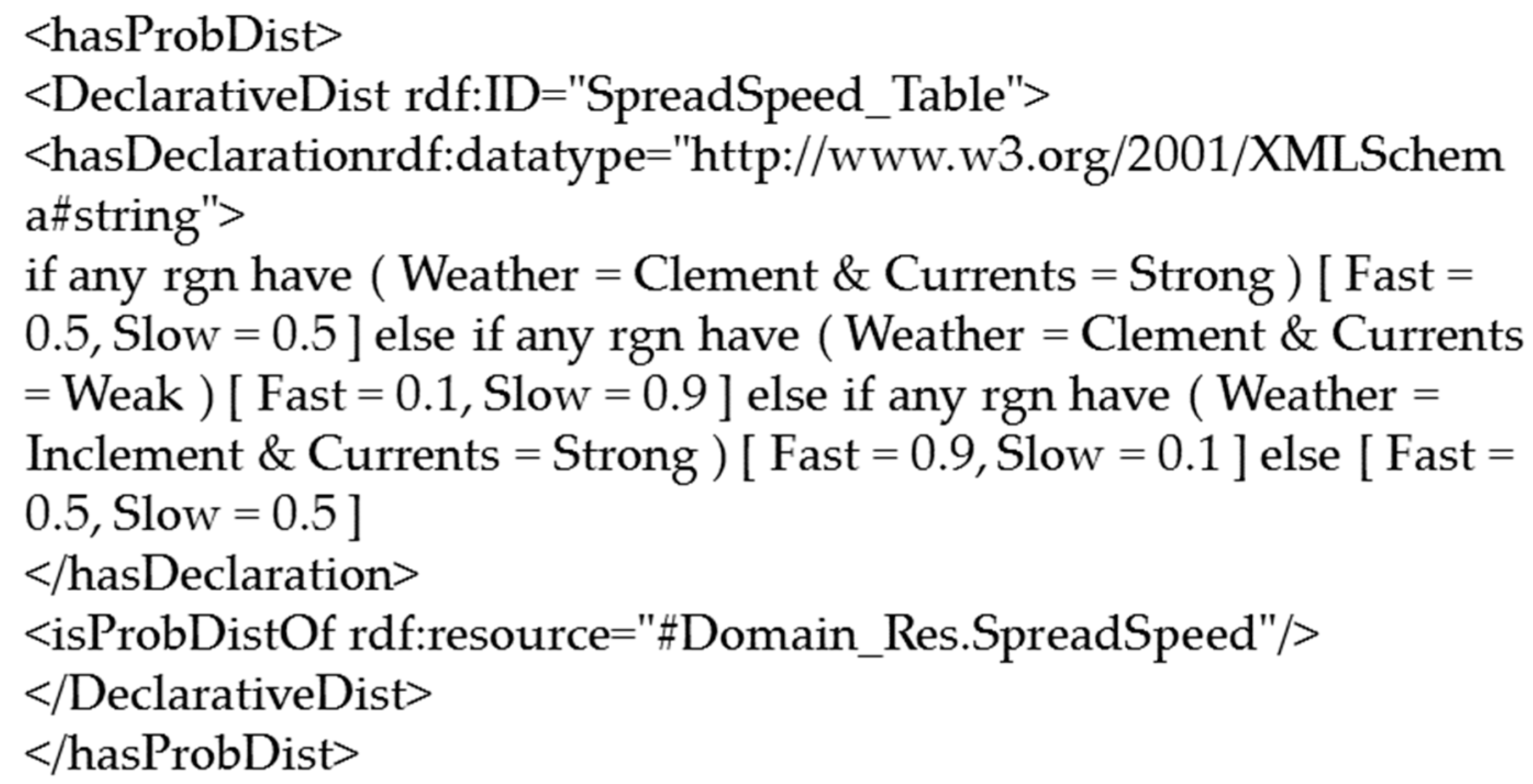
- SpreadSpeed. This concept includes two types of velocity, namely, Fast and Slow, to describe the possible spreading speed of the detected oil spill. It is asserted that the spreading speed depends on two features: Weather and Currents.
- Weather. It conceptualizes two kinds of weather conditions: Clement and Inclement. Spills often occur in inclement weather and spread more widely in such weather.
- Currents. It describes whether currents in the spilled region fluctuate strongly or weakly.
- EstimatedSize. It is a characteristic of spills and represents the estimated coverage range of spills. Specifically, it is divided into two kinds, Large and Small.
- Thickness. It defines a measuring unit to estimate the quantity of spilled oil, such as Thick and Thin.
5.3. Context Reasoning in the Case Study
5.3.1. Ontological Reasoning
5.3.2. Rule-Based Reasoning
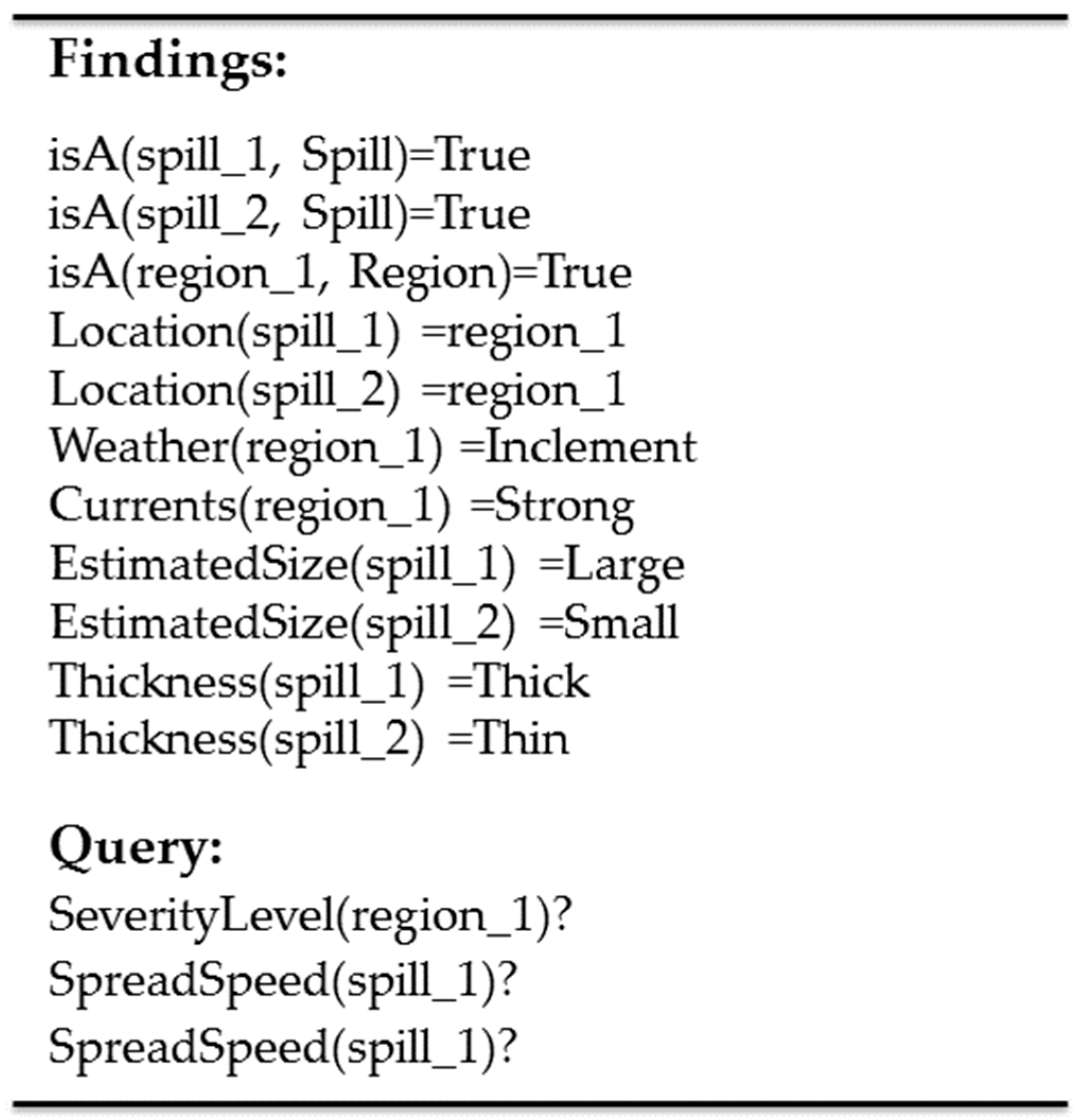
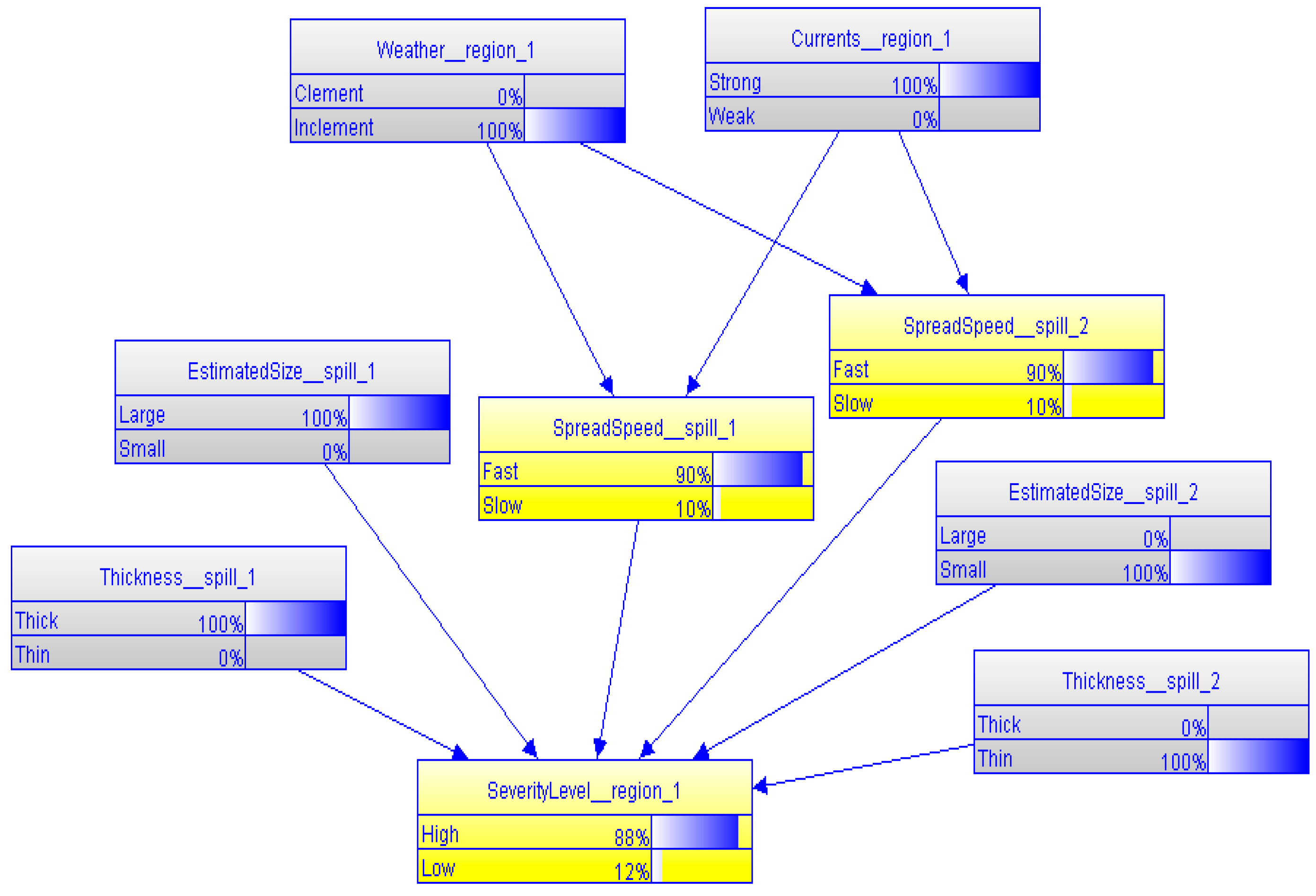
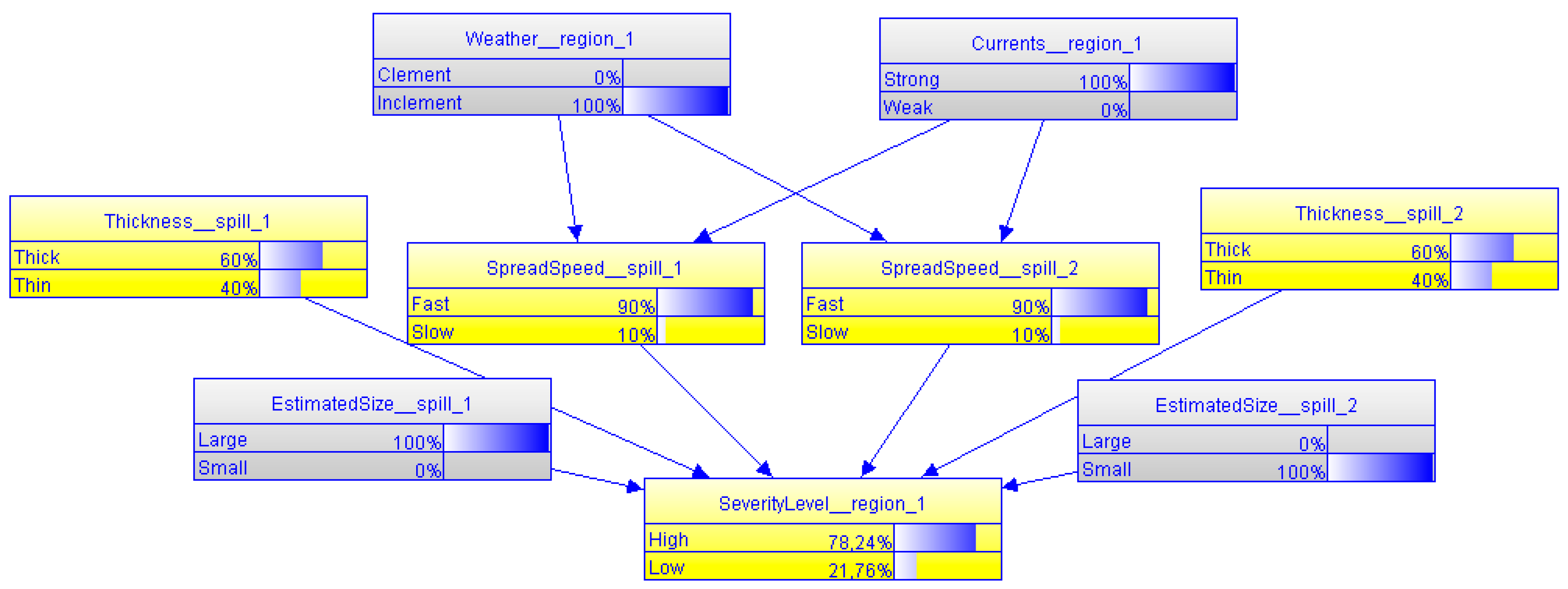
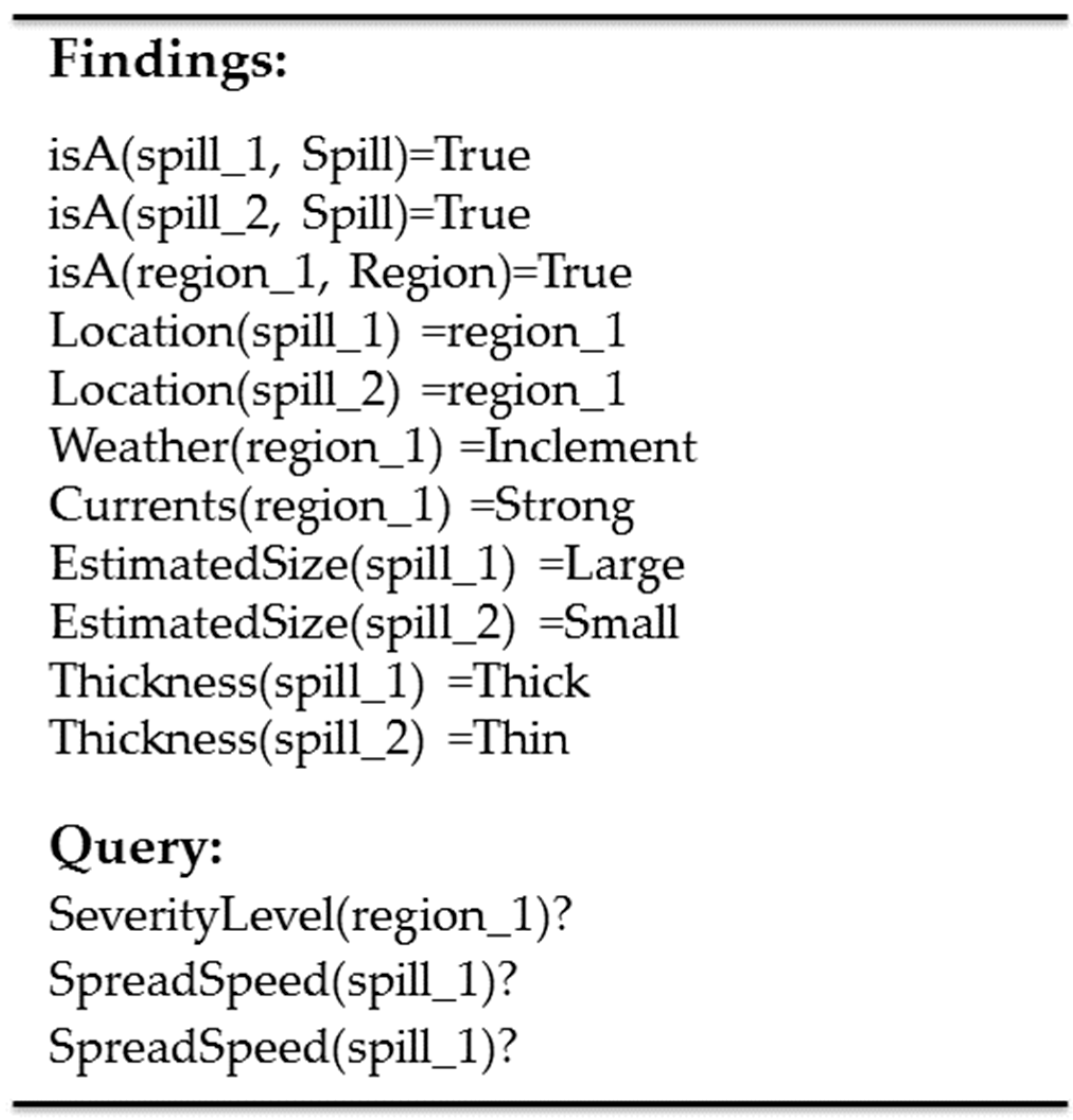
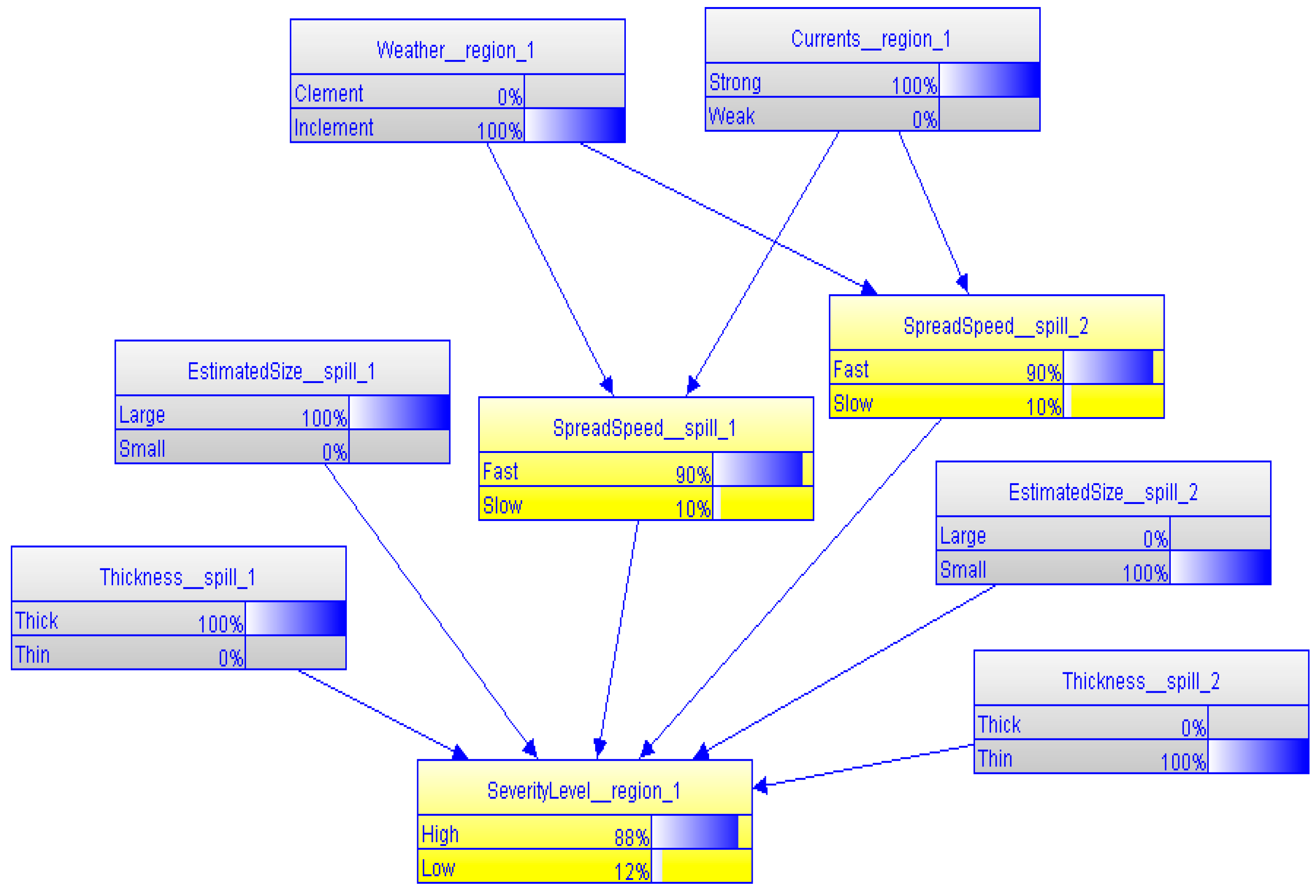
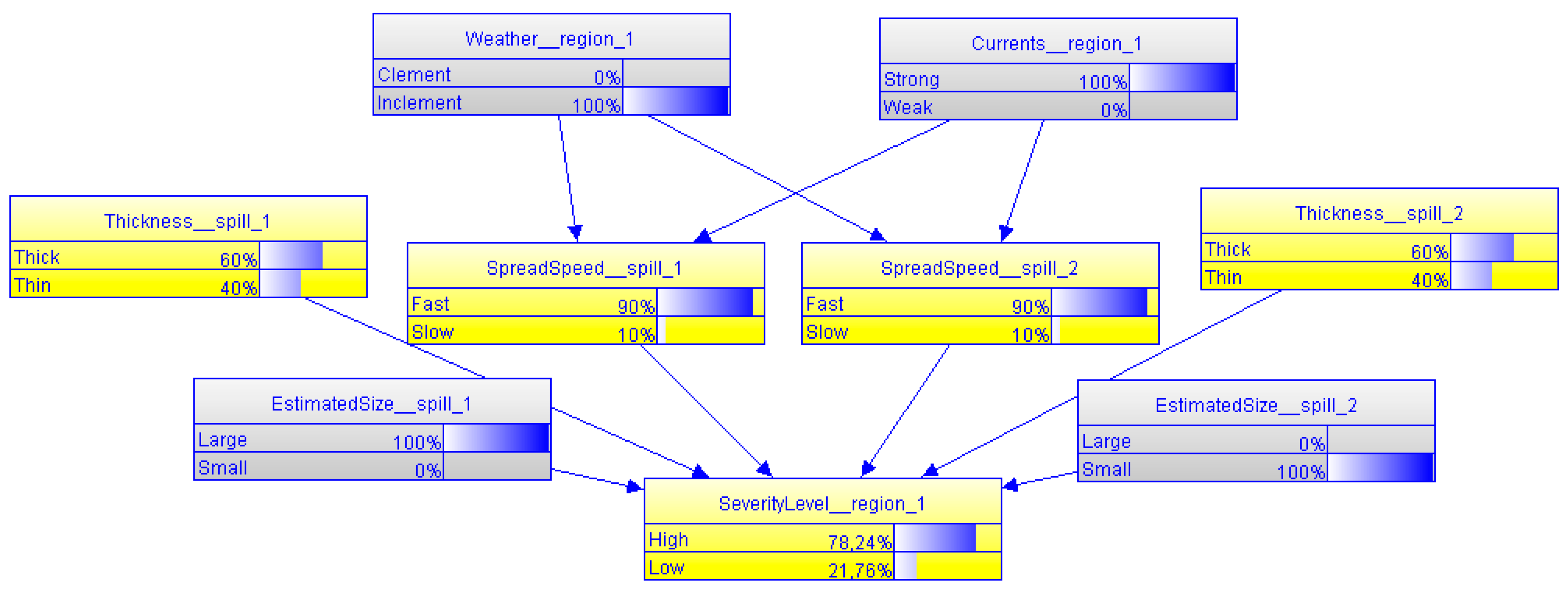
5.3.3. MEBN Reasoning
5.3.4. Discussion
6. Conclusions and Future Work
- The presented context-aware framework is still at the prototype level. Completing its implementation and testing it in real scenarios will be the next step.
- Though the proposed context-aware framework is designed specifically for underwater robotics, it does present a generic solution for managing context and providing context awareness. Therefore, applying it to other robotic domains (e.g., on land and air) and application fields (e.g., smart homes and smart agriculture) could be a potential extension of its usage.
- Other uncertainty reasoning algorithms, such as fuzzy logic and the Markov logic network, will be thoroughly studied. The possibilities of integrating them into the proposed reasoning mechanism for enhancement will be explored.
- Context processing and reasoning are normally time-consuming and resource-intensive. How to achieve a trade-off between the load on managing context data and the actual benefit obtained from high-level context needs to be determined.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Abowd, G.D.; Dey, A.K.; Brown, P.J.; Davies, N.; Smith, M.; Steggles, P. Towards a Better Understanding of Context and Context-Awareness. In Proceedings of the 1st International Symposium on Handheld and Ubiquitous Computing (HUC’99), Karlsruhe, Germany, 27–29 September 1999.
- Curran, K. (Ed.) Ubiquitous Developments in Ambient Computing and Intelligence: Human-Centered Applications; IGI Global: Hershey, PA, USA, 2011.
- Khan, M.; Din, S.; Jabbar, S.; Gohar, M.; Ghayvat, H.; Mukhopadhyay, S.C. Context-aware low power intelligent SmartHome based on the Internet of things. Comput. Electr. Eng. 2016, 52, 208–222. [Google Scholar] [CrossRef]
- Forkan, A.; Khalil, I.; Tari, Z. CoCaMAAL: A cloud-oriented context-aware middleware in ambient assisted living. Future Gener. Comput. Syst. 2014, 35, 114–127. [Google Scholar] [CrossRef]
- Donohoe, M.; Jennings, B.; Balasubramaniam, S. Context-awareness and the smart grid: Requirements and challenges. Comput. Netw. 2015, 79, 263–282. [Google Scholar] [CrossRef]
- Hu, P.; Indulska, J.; Robinson, R. An Autonomic Context Management System for Pervasive Computing. In Proceedings of the Sixth Annual IEEE International Conference on Pervasive Computing and Communications (PerCom 2008), Hong Kong, China, 17–21 March 2008; pp. 213–223.
- Li, X.; Eckert, M.; Martinez, J.-F.; Rubio, G. Context Aware Middleware Architectures: Survey and Challenges. Sensors 2015, 15, 20570–20607. [Google Scholar] [CrossRef] [PubMed]
- The Smart and Networking Underwater Robots in Cooperation Meshes (SWARMs) Project. Available online: http://www.swarms.eu/ (accessed on 14 February 2017).
- Perera, C.; Zaslavsky, A.; Christen, P.; Georgakopoulos, D. Context Aware Computing for The Internet of Things: A Survey. IEEE Commun. Surv. Tutor. 2014, 16, 414–454. [Google Scholar] [CrossRef]
- Strang, T.; Linnhoff-Popien, C. A Context Modeling Survey. In Proceedings of the Sixth International Conference on Ubiquitous Computing, Nottingham, UK, 7–10 September 2004.
- Martín-Wanton, T.; Muelas, E.; de la Cámara, S.; Rodríguez-Molina, J.; Li, X.; Martínez, J.-F. Modelado de vehículos autónomos y la incertidumbre de su entorno para la seguridad de operaciones marítimas. In Proceedings of the IV Congreso Nacional de I+D en Defensa y Seguridad, San Javier, Murcia, Spain, 16–18 November 2016.
- Li, X.; Martínez, J.-F.; Rodríguez-Molina, J.; Martínez, N. A Survey on Intermediation Architectures for Underwater Robotics. Sensors 2016, 16, 190. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bettini, C.; Brdiczka, O.; Henricksen, K.; Indulska, J.; Nicklas, D.; Ranganathan, A.; Riboni, D. A survey of context modelling and reasoning techniques. Pervasive Mob. Comput. 2010, 6, 161–180. [Google Scholar] [CrossRef]
- Bikakis, A.; Patkos, T.; Antoniou, G.; Plexousakis, D. A Survey of Semantics-Based Approaches for Context Reasoning in Ambient Intelligence. In Constructing Ambient Intelligence; Mühlhäuser, M., Ferscha, A., Aitenbichler, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 11, pp. 14–23. [Google Scholar]
- Villalonga, C.; Razzaq, M.; Khan, W.; Pomares, H.; Rojas, I.; Lee, S.; Banos, O. Ontology-Based High-Level Context Inference for Human Behavior Identification. Sensors 2016, 16, 1617. [Google Scholar] [CrossRef] [PubMed]
- The Semantic Web Rule Language (SWRL). Available online: https://www.w3.org/Submission/SWRL/ (accessed on 13 February 2017).
- Bikakis, A.; Antoniou, G. Rule-Based Contextual Reasoning in Ambient Intelligence. In Semantic Web Rules; Dean, M., Hall, J., Rotolo, A., Tabet, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6403, pp. 74–88. [Google Scholar]
- Laskey, K.B. MEBN: A language for first-order Bayesian knowledge bases. Artif. Intell. 2008, 172, 140–178. [Google Scholar] [CrossRef]
- Want, R.; Hopper, A.; Falcão, V.; Gibbons, J. The active badge location system. ACM Trans. Inf. Syst. 1992, 10, 91–102. [Google Scholar] [CrossRef]
- Baldauf, M.; Dustdar, S.; Rosenberg, F. A survey on context-aware systems. Int. J. Ad Hoc Ubiquitous Comput. 2007, 2, 263. [Google Scholar] [CrossRef]
- Saeed, A.; Waheed, T. An extensive survey of context-aware middleware architectures. In Proceedings of the 2010 IEEE International Conference on Electro/Information Technology (EIT), Normal, IL, USA, 20–22 May 2010; pp. 1–6.
- Miguelanez, E.; Patron, P.; Brown, K.E.; Petillot, Y.R.; Lane, D.M. Semantic Knowledge-Based Framework to Improve the Situation Awareness of Autonomous Underwater Vehicles. IEEE Trans. Knowl. Data Eng. 2011, 23, 759–773. [Google Scholar] [CrossRef]
- Insaurralde, C.C.; Cartwright, J.J.; Petillot, Y.R. Cognitive Control Architecture for autonomous marine vehicles. In Proceedings of the 2012 IEEE International Systems Conference (SysCon), Vancouver, BC, Canada, 19–22 March 2012; pp. 1–8.
- Schmickl, T.; Thenius, R.; Moslinger, C.; Timmis, J.; Tyrrell, A.; Read, M.; Hilder, J.; Halloy, J.; Campo, A.; Stefanini, C.; et al. CoCoRo—The Self-Aware Underwater Swarm. In Proceedings of the Fifth Conference on Self-Adaptive and Self-Organizing Systems Workshops (SASOW), Ann Arbor, MI, USA, 3–7 October 2011; pp. 120–126.
- Lukasiewicz, T.; Straccia, U. Managing uncertainty and vagueness in description logics for the Semantic Web. J. Web Semant. 2008, 6, 291–308. [Google Scholar] [CrossRef]
- Ding, Z.; Peng, Y.; Pan, R. BayesOWL: Uncertainty Modeling in Semantic Web Ontologies. In Soft Computing in Ontologies and Semantic Web; Springer: Berlin/Heidelberg, Germany, 2006; Volume 204, pp. 3–29. [Google Scholar]
- Yang, Y.; Calmet, J. OntoBayes: An Ontology-Driven Uncertainty Model. In Proceedings of the CIMCA’05 International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce, Vienna, Austria, 28–30 November 2005; Volume 1.
- Aitor, A.; López-de-lpiña, D. Assessing ambiguity of context data in intelligent environments: Towards a more reliable context managing system. Sensors 2012, 12, 4934–4951. [Google Scholar] [CrossRef]
- Web Ontology Language (OWL). Available online: https://www.w3.org/OWL/ (accessed on 13 February 2017).
- Nottelmann, H.; Fuhr, N. Adding probabilities and rules to OWL Lite subsets based on probabilistic datalog. Int. J. Uncertain. Fuzz. Knowl. Based Syst. 2006, 14, 17–41. [Google Scholar] [CrossRef]
- Ko, K.E.; Sim, K.B. Development of context aware system based on Bayesian network driven context reasoning method and ontology context modeling. In Proceedings of the International Conference on Control, Automation and Systems (ICCAS), Seoul, Korea, 14–17 October 2008; pp. 2309–2313.
- Pilato, G.; Augello, A.; Missikoff, M.; Taglino, F. Integration of Ontologies and Bayesian Networks for Maritime Situation Awareness. In Proceedings of the 2012 IEEE Sixth International Conference on Semantic Computing (ICSC), Palermo, Italy, 19–21 September 2012; pp. 170–177.
- Rho, S.; Song, S.; Hwang, E.; Kim, M. COMUS: Ontological and Rule-Based Reasoning for Music Recommendation System. In Advances in Knowledge Discovery and Data Mining; Theeramunkong, T., Kijsirikul, B., Cercone, N., Ho, T.-B., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5476, pp. 859–866. [Google Scholar]
- Bobillo, F.; Straccia, U. Fuzzy ontology representation using OWL 2. Int. J. Approx. Reason. 2011, 52, 1073–1094. [Google Scholar] [CrossRef]
- Carvalho, R.N.; Laskey, K.B.; Costa, P.C.G.; Ladeira, M.; Santos, L.L.; Matsumoto, S. Probabilistic Ontology and Knowledge Fusion for Procurement Fraud Detection in Brazil. In Proceedings of the Fifth International Conference on Uncertainty Reasoning for the Semantic Web (URSW’09), Washington, DC, USA, 26 October 2009.
- Fischer, Y.; Beyerer, J. Ontologies for probabilistic situation assessment in the maritime domain. In Proceedings of the 2013 IEEE International Multi-Disciplinary Conference on Cognitive Methods in Situation Awareness and Decision Support (CogSIMA), San Diego, CA, USA, 25–28 February 2013; pp. 102–105.
- Chantas, G.; Kitsikidis, A.; Nikolopoulos, S.; Dimitropoulos, K.; Douka, S.; Kompatsiaris, I.; Grammalidis, N. Multi-Entity Bayesian Networks for Knowledge-Driven Analysis of ICH Content. In Computer Vision—ECCV 2014 Workshops; Agapito, L., Bronstein, M.M., Rother, C., Eds.; Springer: Cham, Switzerland, 2015; Volume 8926, pp. 355–369. [Google Scholar]
- Raza, S.; Haider, S.; Wiliams, M.A. Robot reasoning using first order Bayesian networks. In Integrated Uncertainty in Knowledge Modelling and Decision Making; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8032, pp. 1–12. [Google Scholar]
- Da Costa, P.C.G.; Laskey, K.B.; Laskey, K.J. PR-OWL: A Bayesian Ontology Language for the Semantic Web. In Uncertainty Reasoning for the Semantic Web I; Da Costa, P.C.G., d’Amato, C., Fanizzi, N., Laskey, K.B., Laskey, K.J., Lukasiewicz, T., Nickles, M., Pool, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 5327, pp. 88–107. [Google Scholar]
- Resource Description Framework (RDF). Available online: https://www.w3.org/RDF/ (accessed on 13 February 2017).
- The SWARMs Ontology. Available online: https://archive.org/download/ontology_model (accessed on 13 February 2017).
- The OWL Entailment. Available online: https://www.w3.org/TR/owl2-profiles/ (accessed on 13 February 2017).
- The Pellet Reasoner. Available online: https://www.w3.org/2001/sw/wiki/Pellet (accessed on 13 February 2017).
- The HermiT Reasoner. Available online: http://www.hermit-reasoner.com/ (accessed on 13 February 2017).
- The FaCT++ Reasoner. Available online: http://owl.cs.manchester.ac.uk/tools/fact/ (accessed on 13 February 2017).
- The Rule Markup Language (RuleML). Available online: http://wiki.ruleml.org/index.php/RuleML_Home (accessed on 13 February 2017).
- The Protégé. Available online: http://protege.stanford.edu/ (accessed on 13 February 2017).
- The UnBBayes. Available online: http://unbbayes.sourceforge.net/ (accessed on 13 February 2017).
- The SPARQL Query Language for RDF (SPARQL). Available online: https://www.w3.org/TR/rdf-sparql-query/ (accessed on 13 February 2017).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ontological Reasoning Constructs | Specifications | Examples |
|---|---|---|
| subClassOf | Indicating that concepts are sub-concepts of a super class and are transitive. | (?A rdfs:subClassOf ?B) (?B rdfs:subClassOf ?C) (?A rdfs:subClassOf ?C) |
| subPropertyOf | Specifying that properties are sub-properties of a super property and are transitive. | (?A rdfs:subPropertyOf ?B) (?B rdfs:subPropertyOf ?C) (?A rdfs:subPropertyOf ?C) |
| TransitiveProperty | Specifying that the characteristic of properties is transitive. | (?p rdf:type owl:TransitiveProperty) (?A ?p ?B) (?B ?p ?C) (?A ?p ?C) |
| SymmetricProperty | Specifying that properties are symmetric. | (?p rdf:type owl:SymmetricProperty) (?A ?p ?B) (?B ?p ?A) |
| DisjointWith | A member of one class cannot simultaneously be an individual of other classes that are tagged as disjointWith. | (?A owl:differentFrom ?B) (?C rdf:type ?A) (?D rdf:type ?B) (?C owl:differentFrom ?D) |
| inverseOf | Indicating that knowing one of two properties allow us to imply the other. | (?p owl:inverseOf ?r) (?A ?p ?B) (?B ?r ?A) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Martínez, J.-F.; Rubio, G. Towards a Hybrid Approach to Context Reasoning for Underwater Robots. Appl. Sci. 2017, 7, 183. https://doi.org/10.3390/app7020183
Li X, Martínez J-F, Rubio G. Towards a Hybrid Approach to Context Reasoning for Underwater Robots. Applied Sciences. 2017; 7(2):183. https://doi.org/10.3390/app7020183
Chicago/Turabian StyleLi, Xin, José-Fernán Martínez, and Gregorio Rubio. 2017. "Towards a Hybrid Approach to Context Reasoning for Underwater Robots" Applied Sciences 7, no. 2: 183. https://doi.org/10.3390/app7020183