Numerical Simulation of an Oscillatory-Type Tidal Current Powered Generator Based on Robotic Fish Technology


Abstract
:
1. Introduction
2. Study on an Airfoil-Type Oscillator
3. The Optimum Shape of a Reciprocating Oscillator for Self-Induced Oscillation
3.1. The Pre-Test in 2D
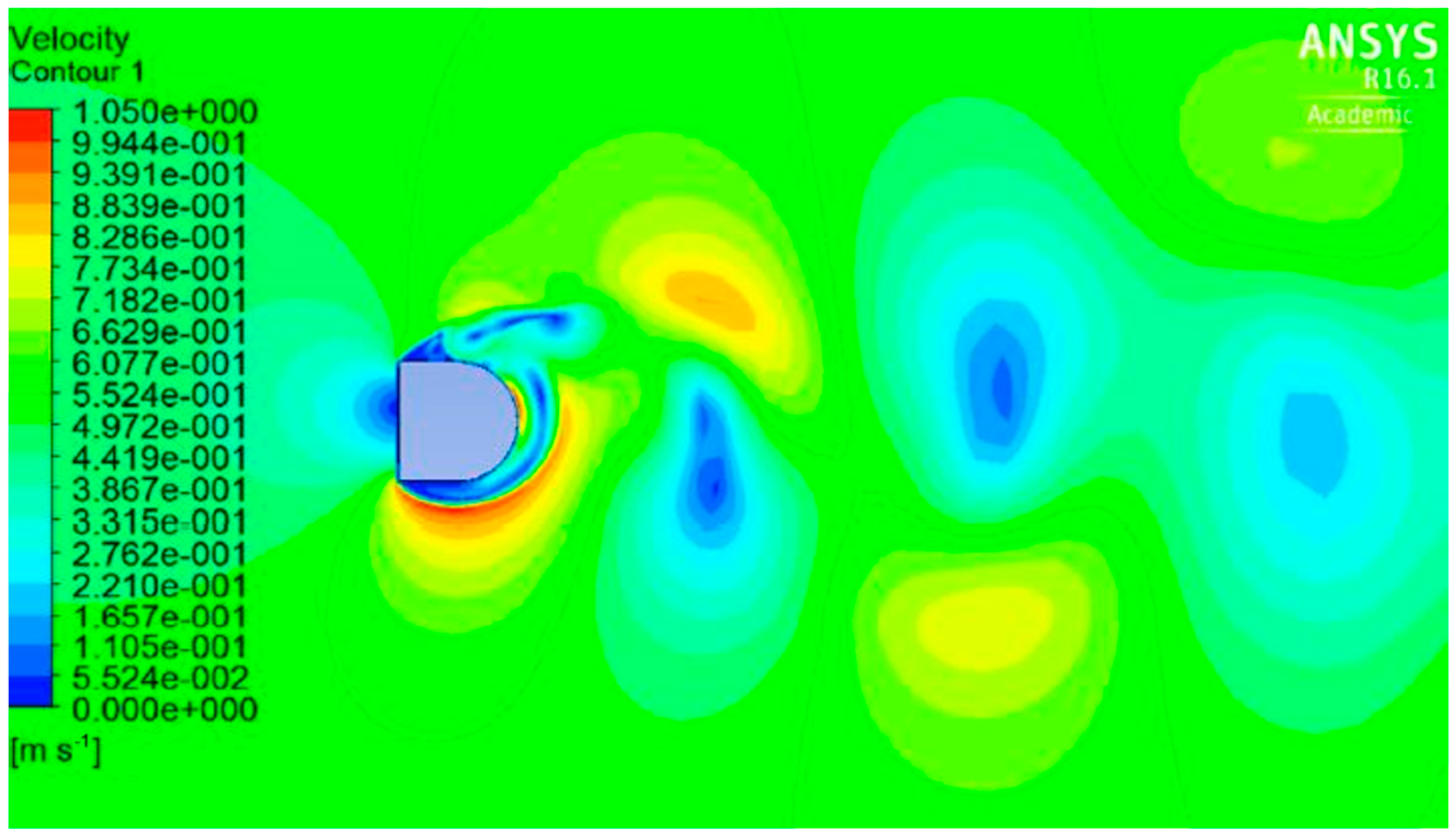
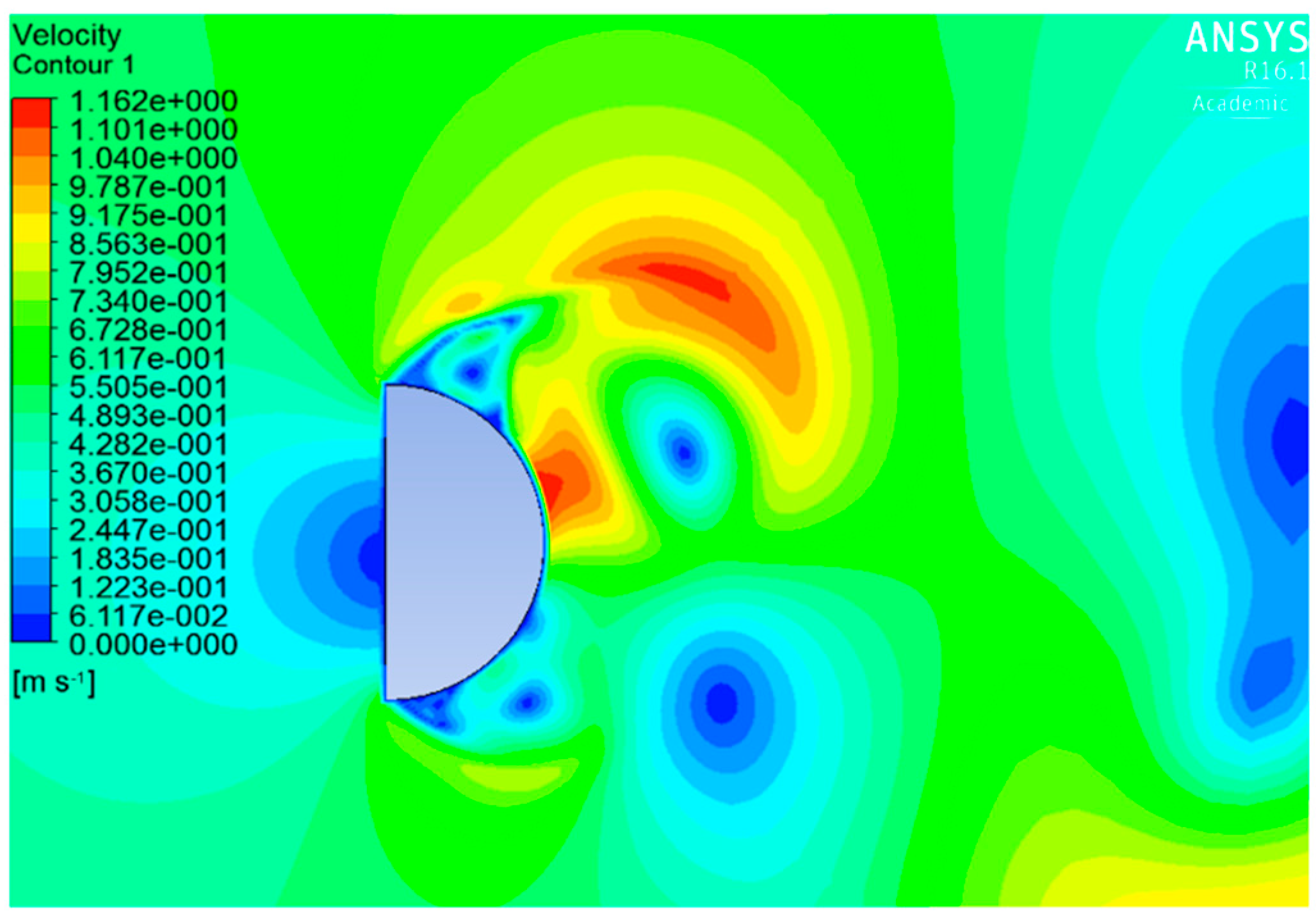
3.1.1. Reason for a Higher Value in the Case of a Semicircle
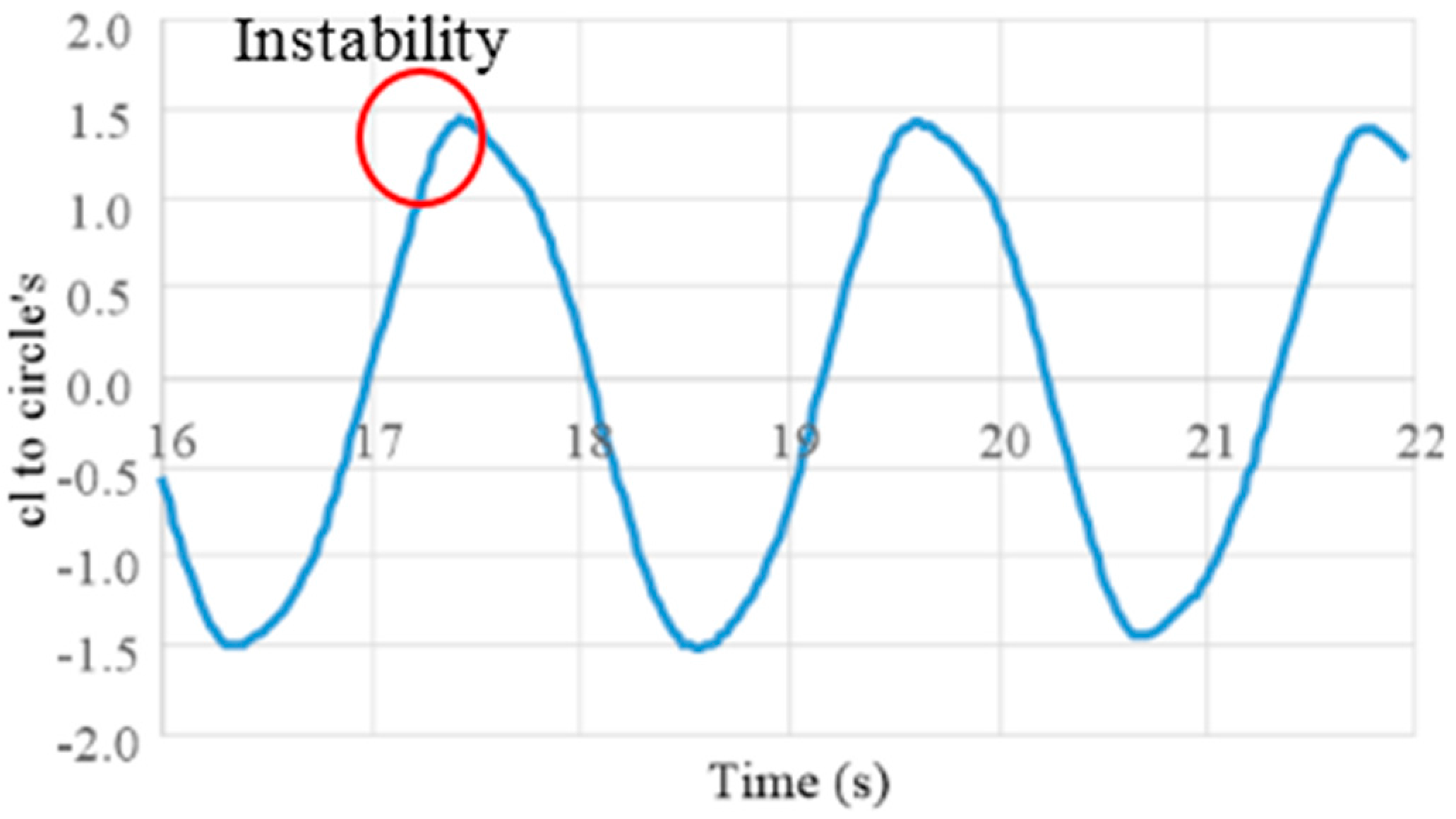
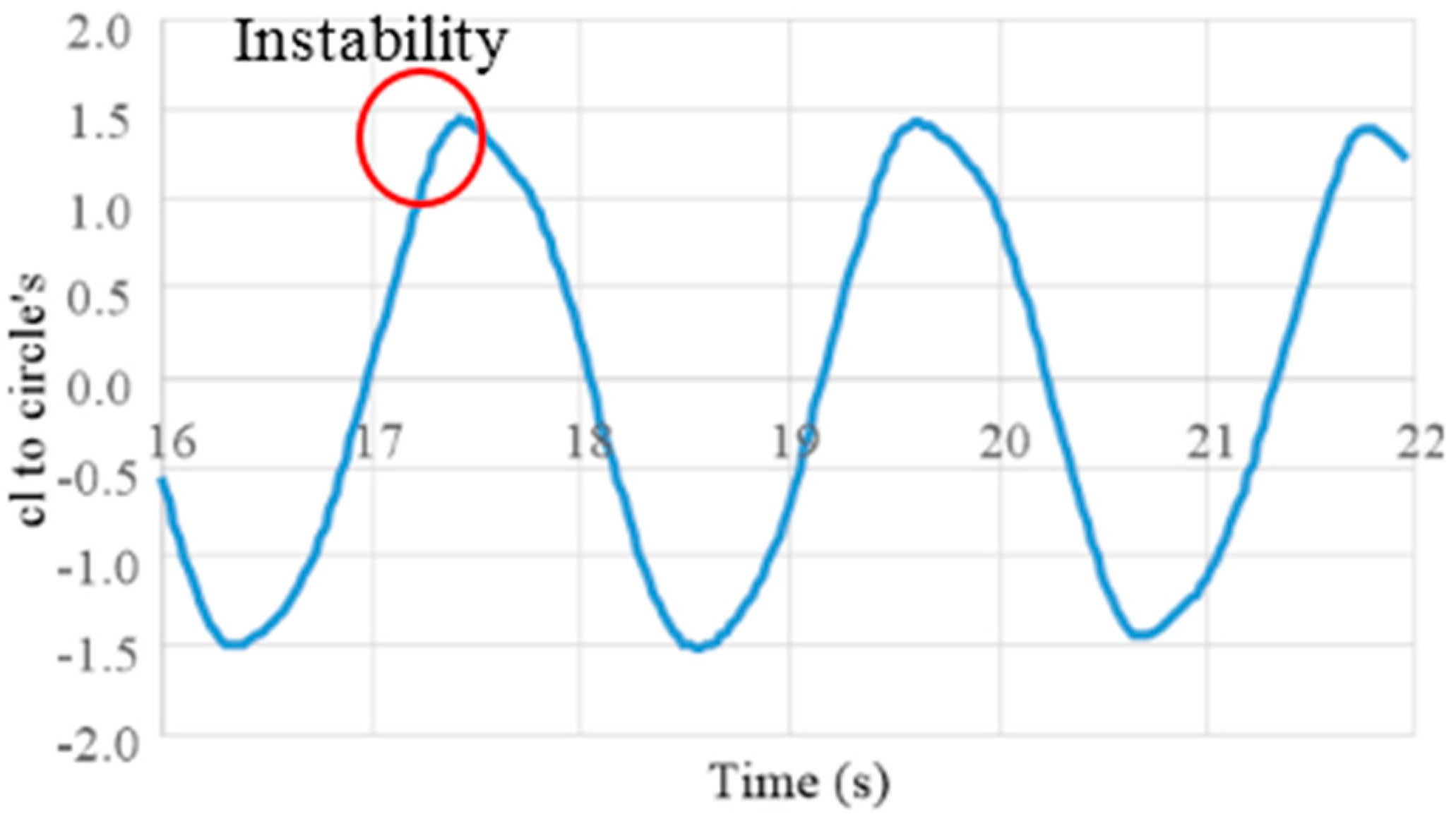
3.1.2. Reason for Increasing Instability with Elongation
3.1.3. Finding a Model with Optimal Length in the x-Direction
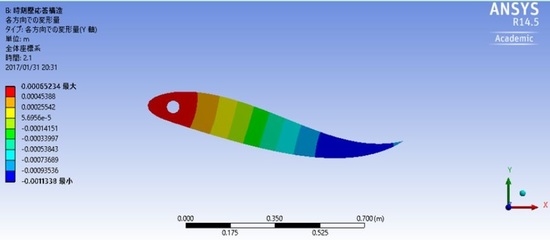
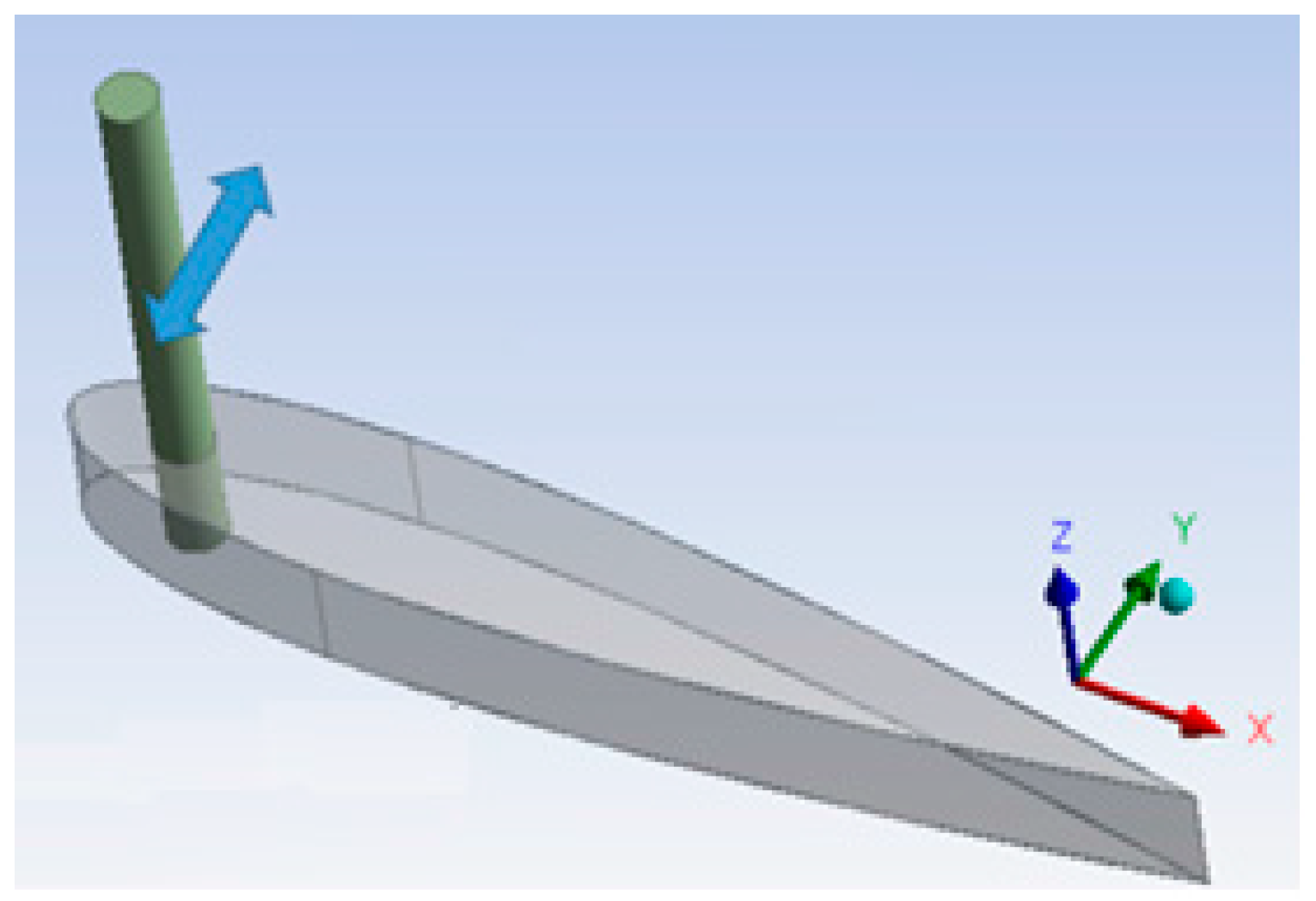
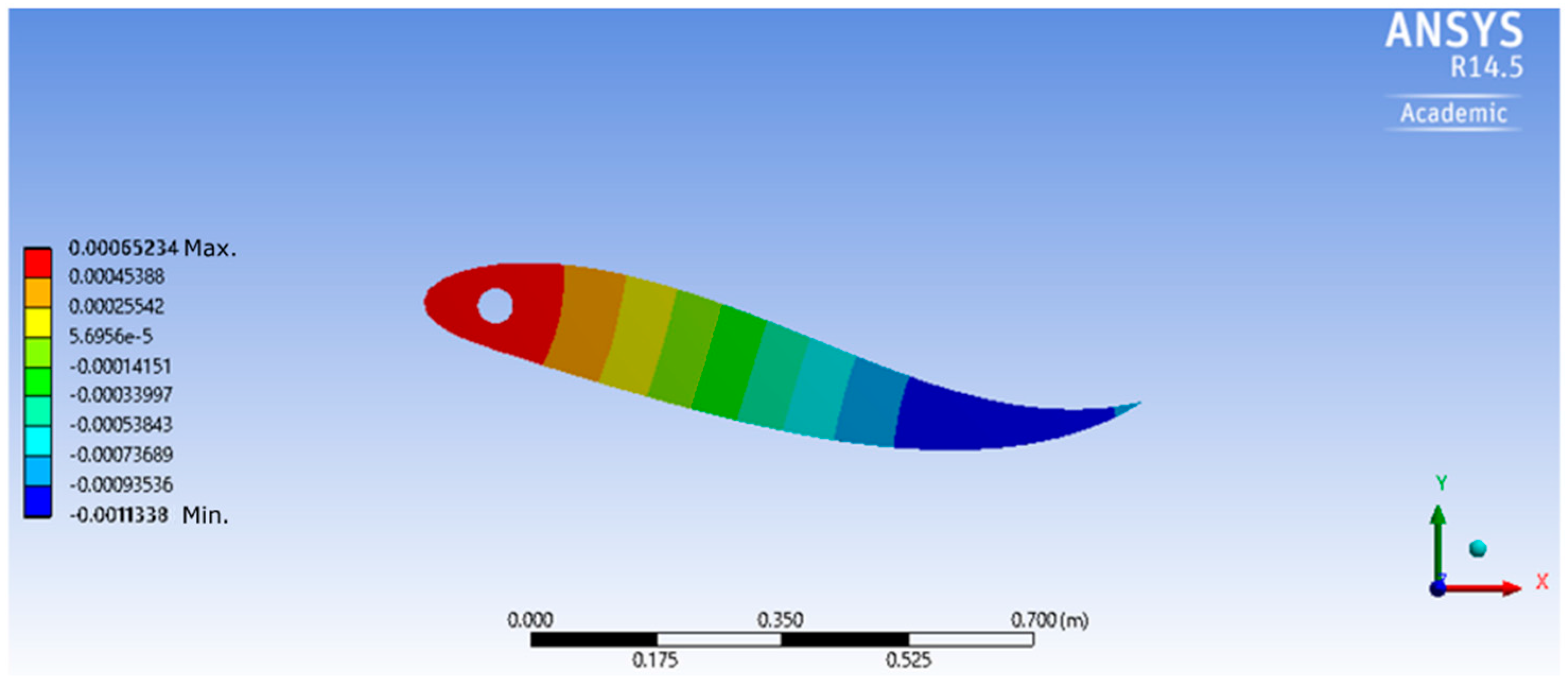
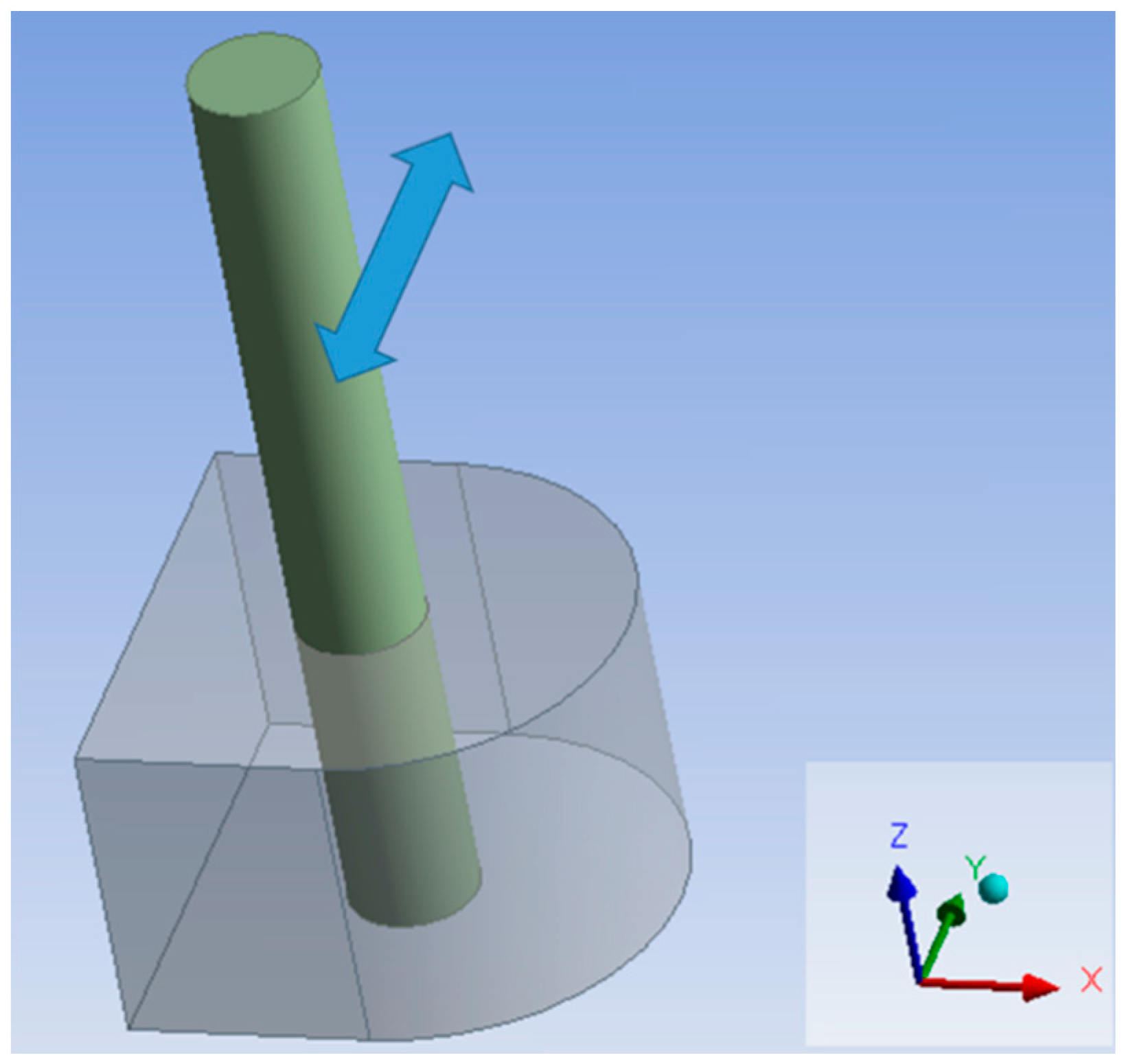
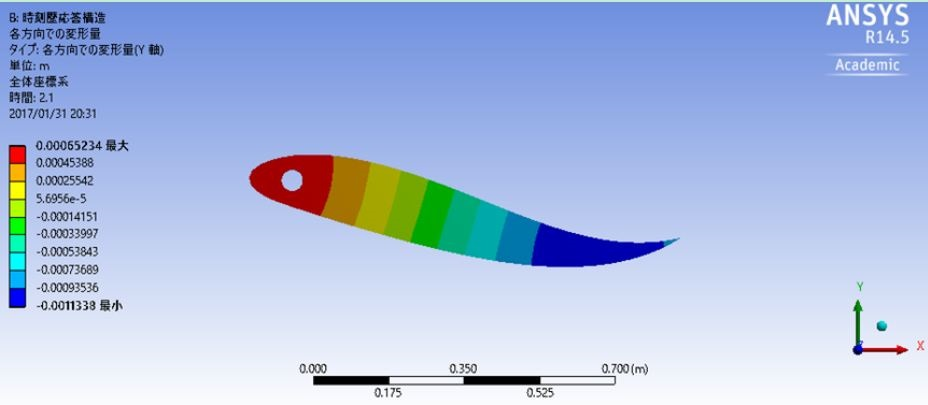
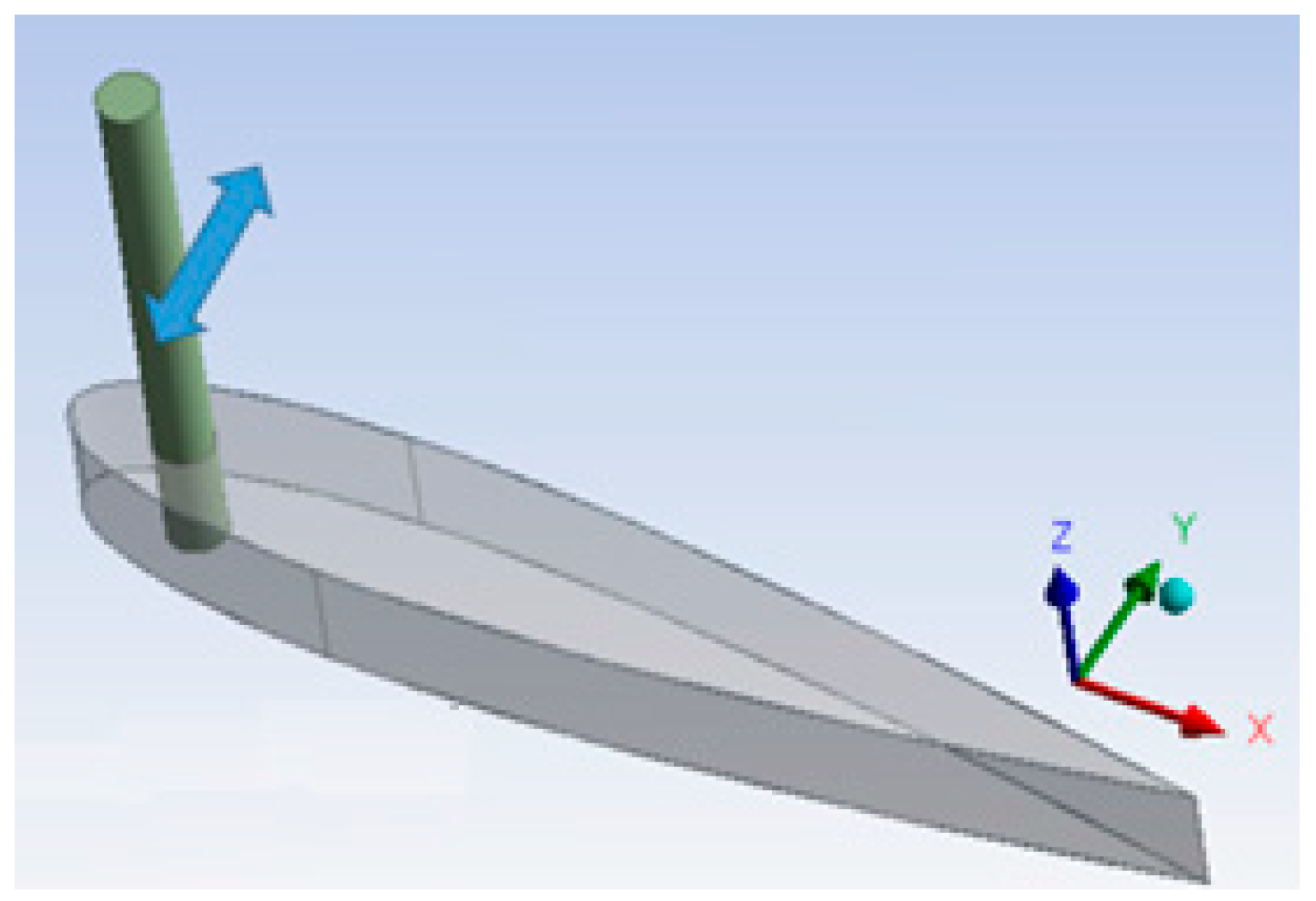
3.1.4. 3D Fluid-Structure Coupled Analysis
4. Conclusions
- (1)
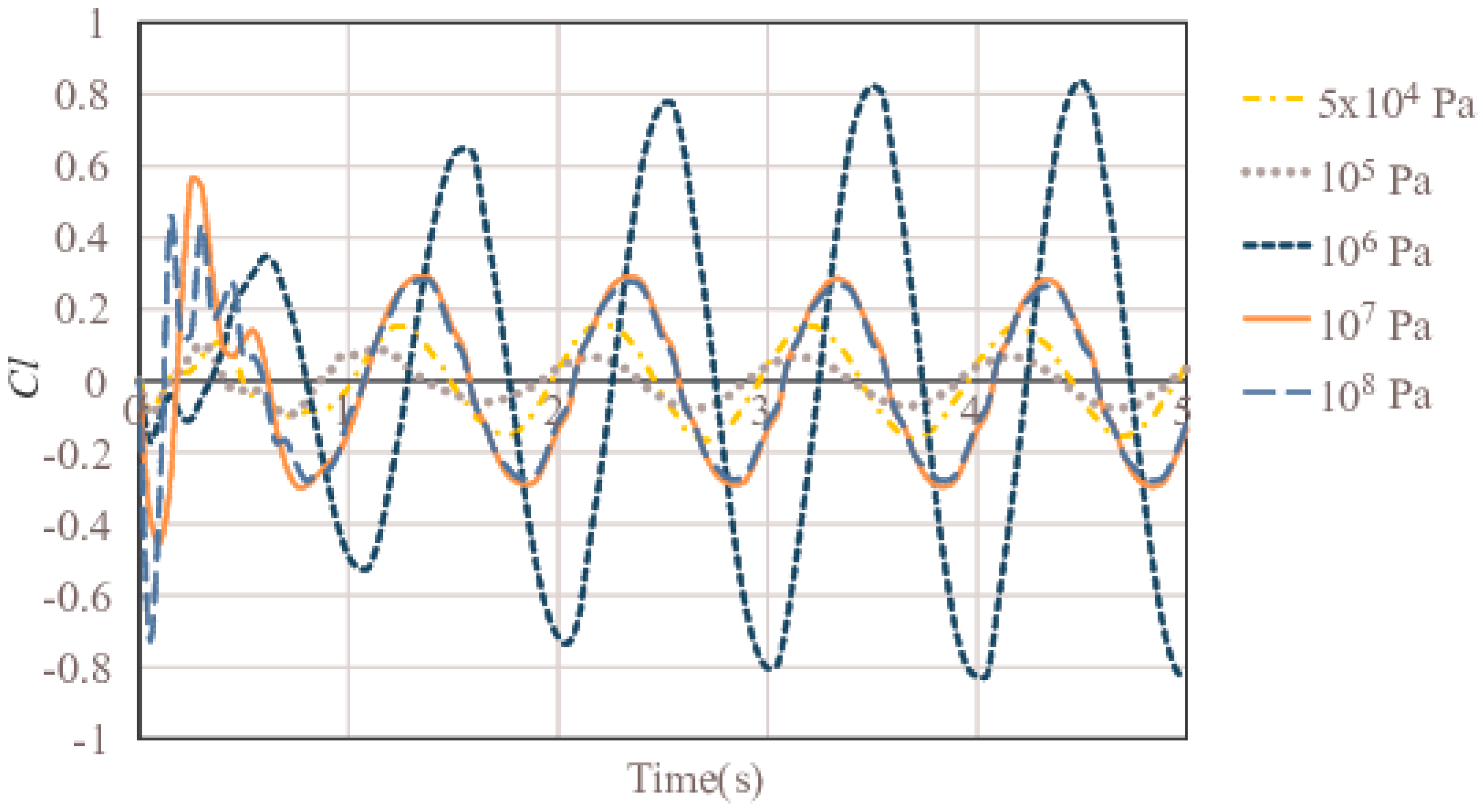
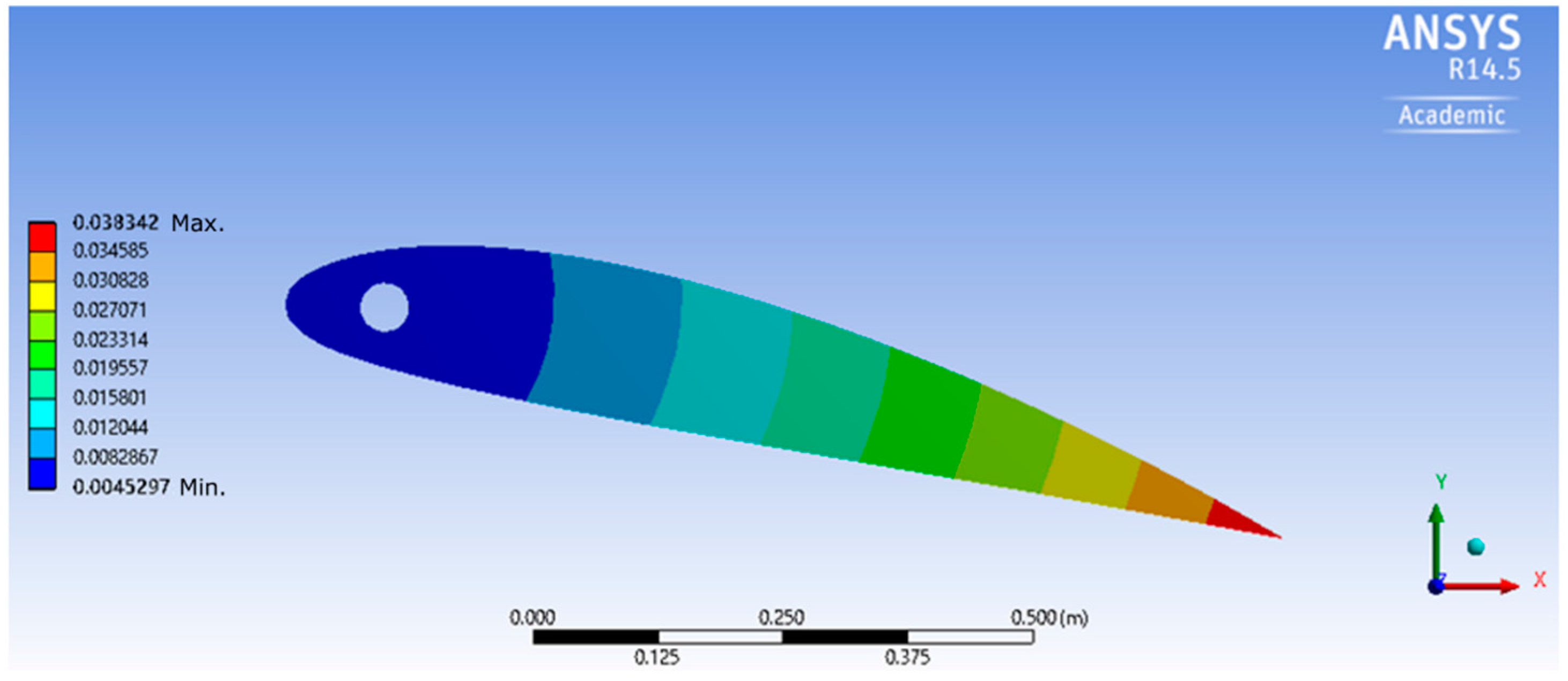
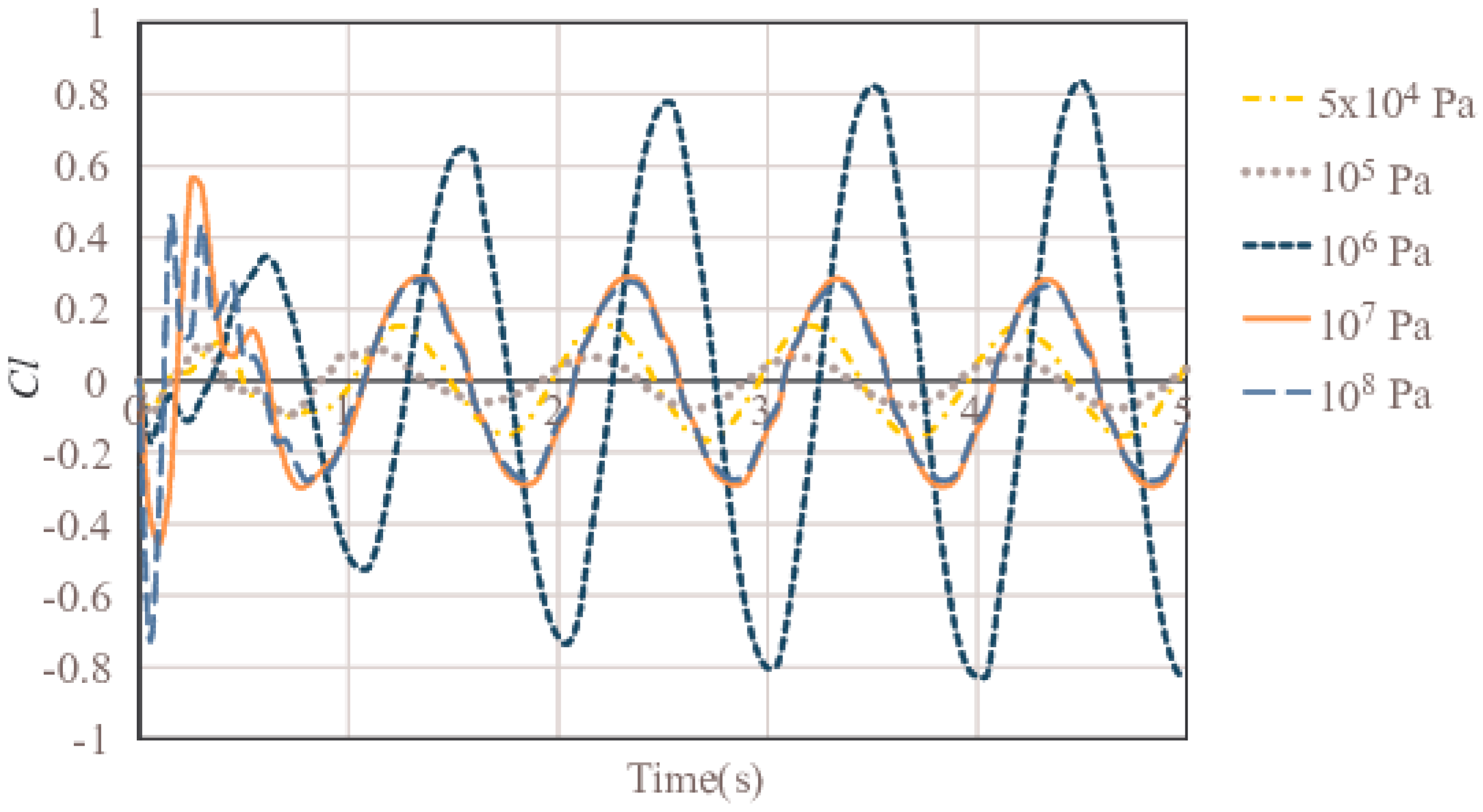
- An airfoil-shaped oscillator with optimal elasticity effectively increases lift, and we found that the elastic modulus E = 106 Pa is the best for a NACA0015 model foil.
- (2)
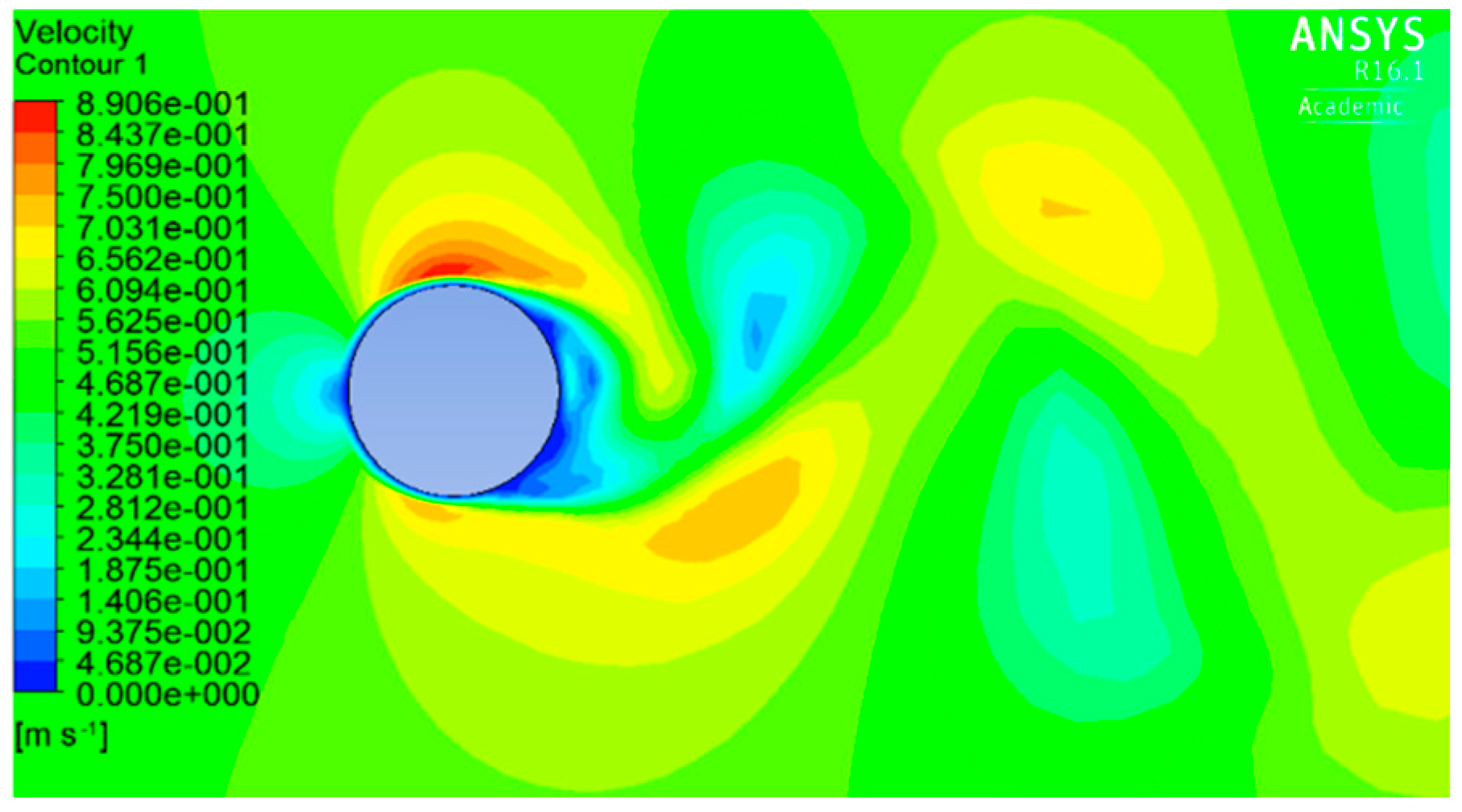
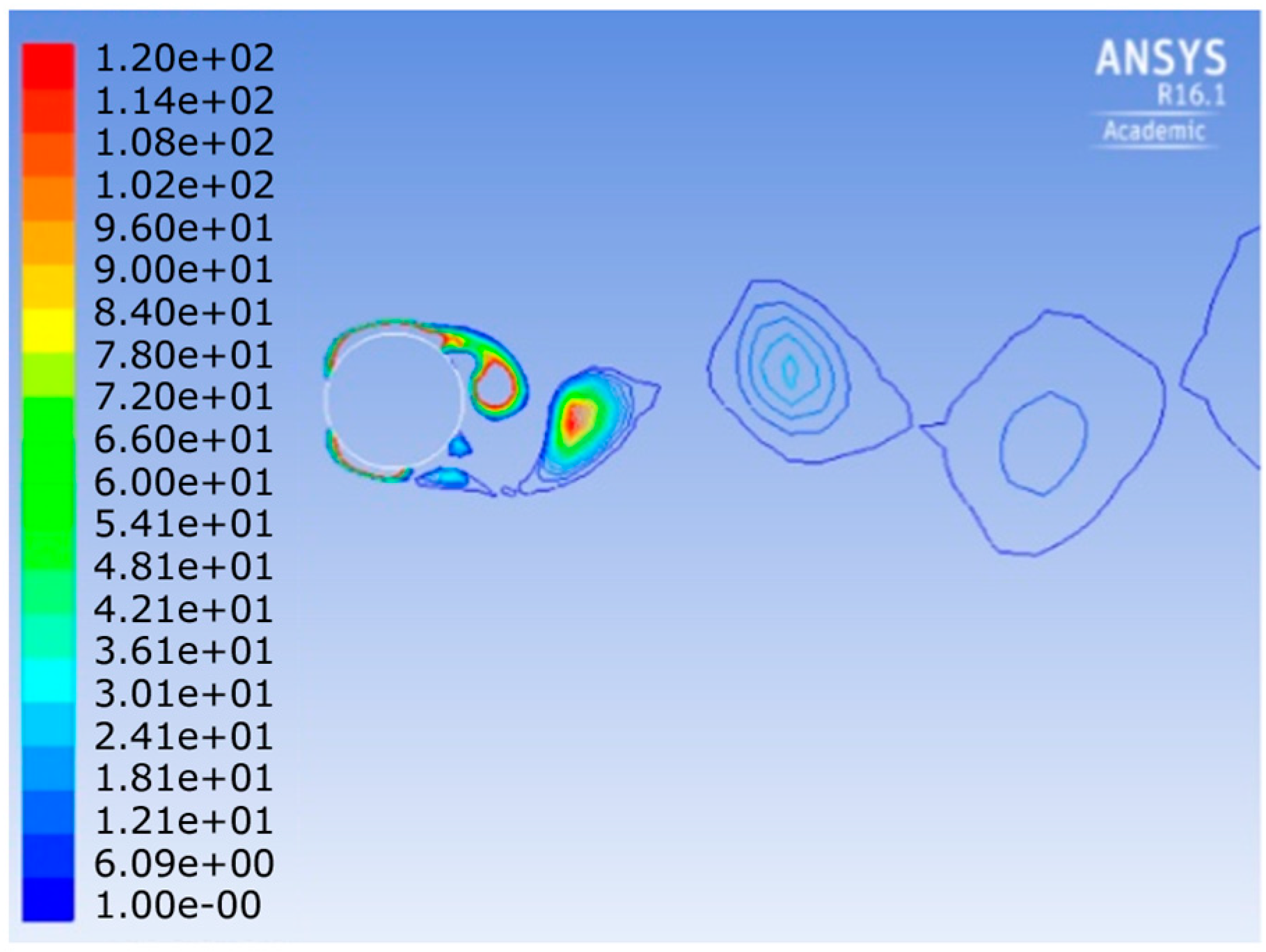
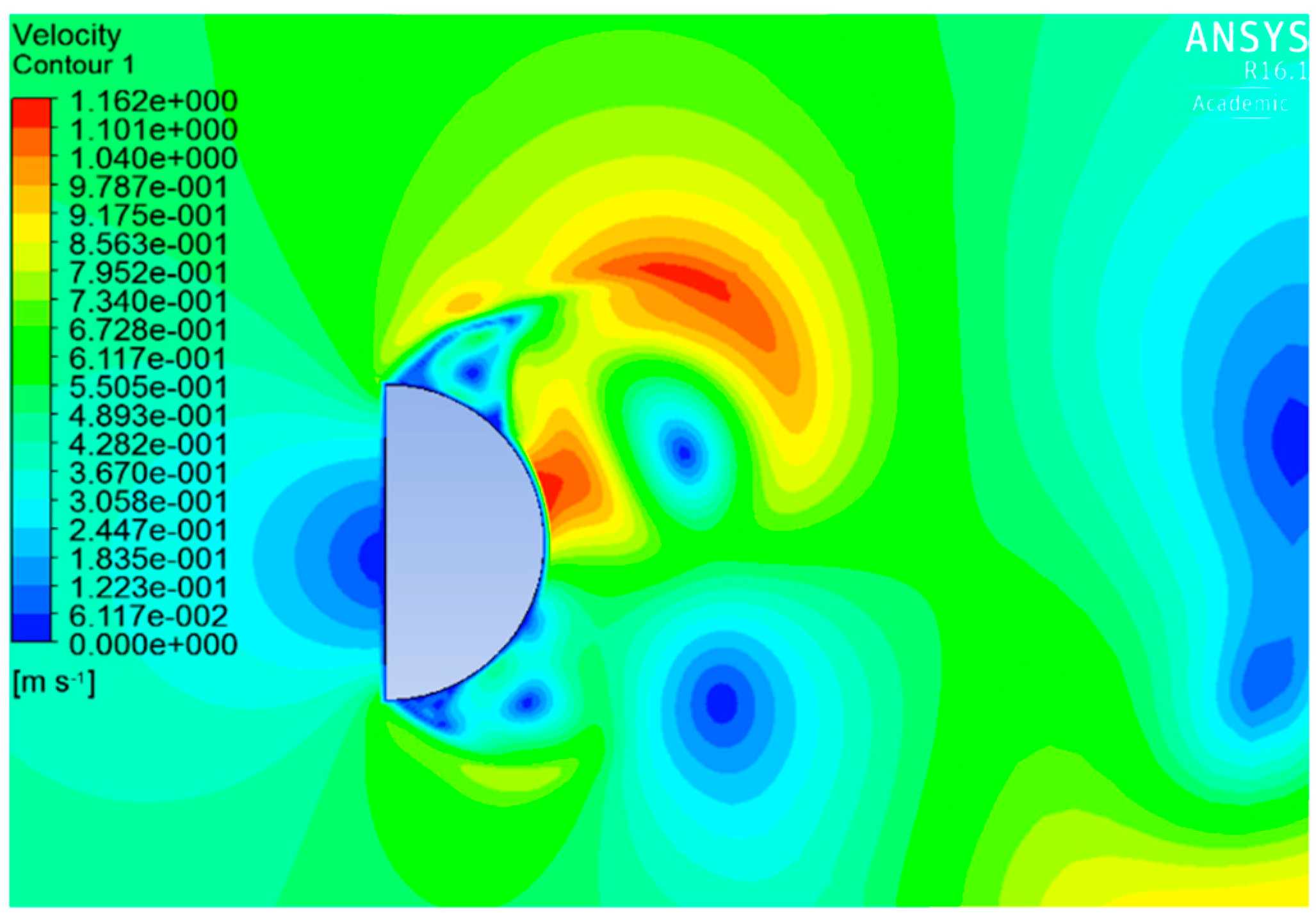
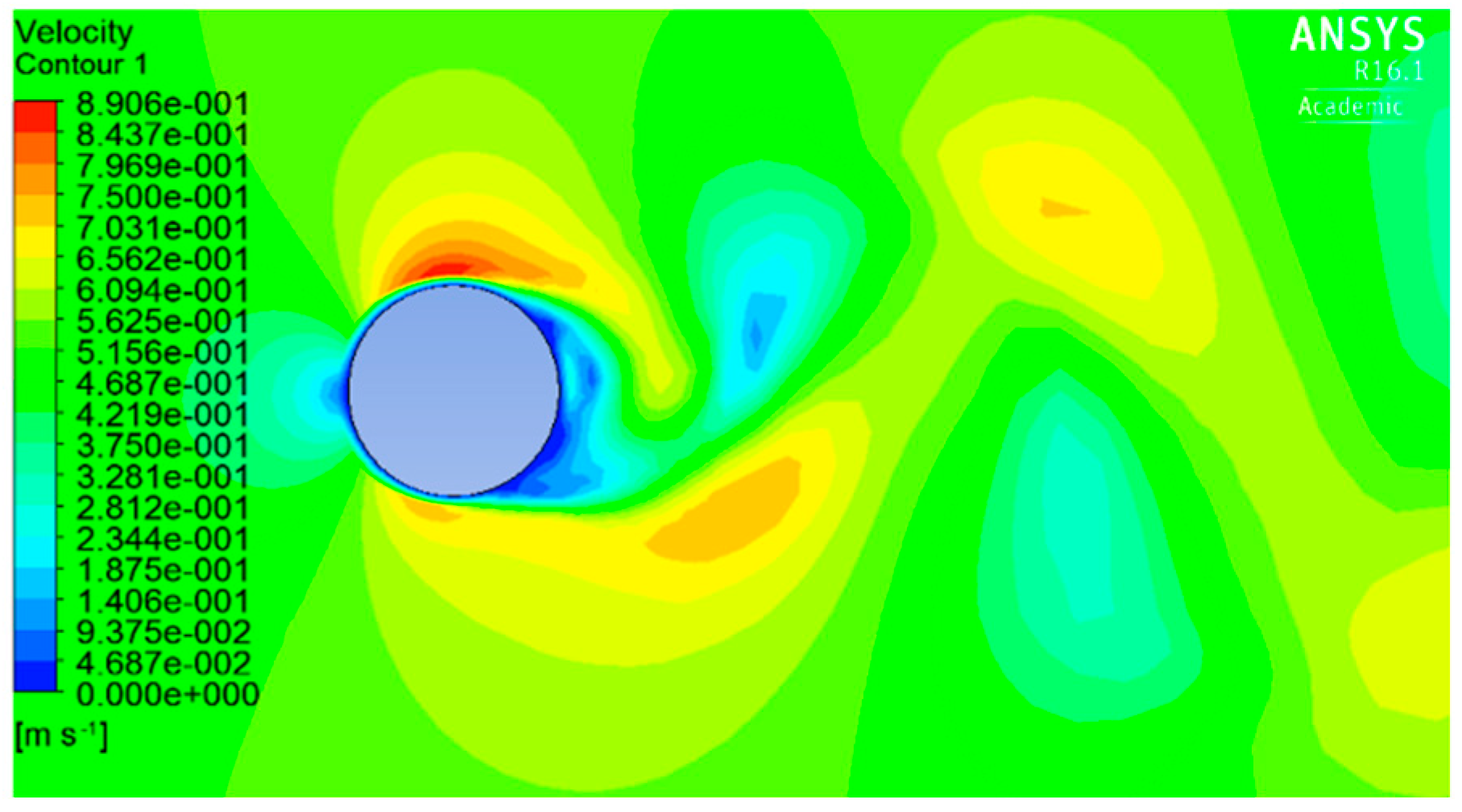
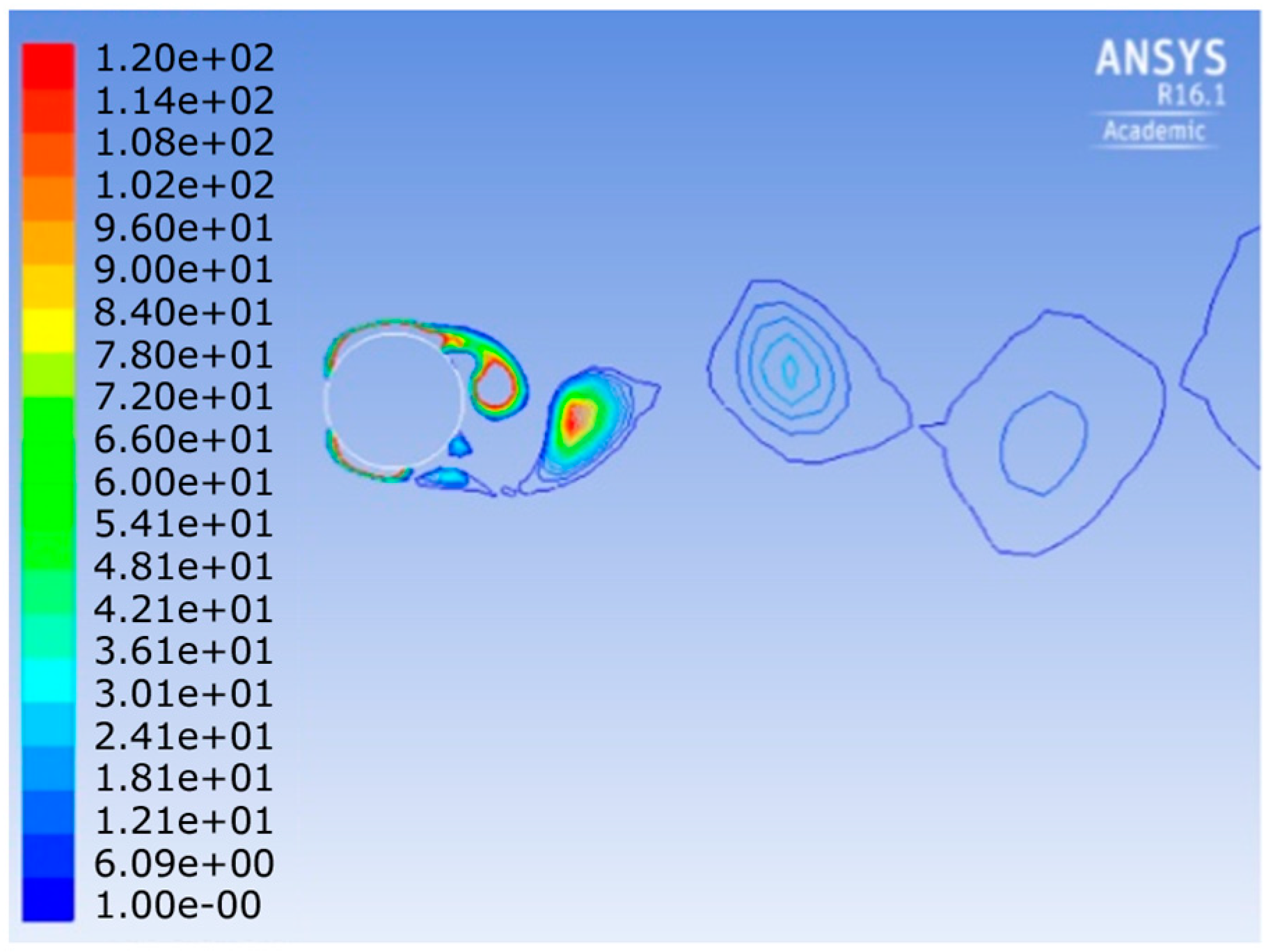
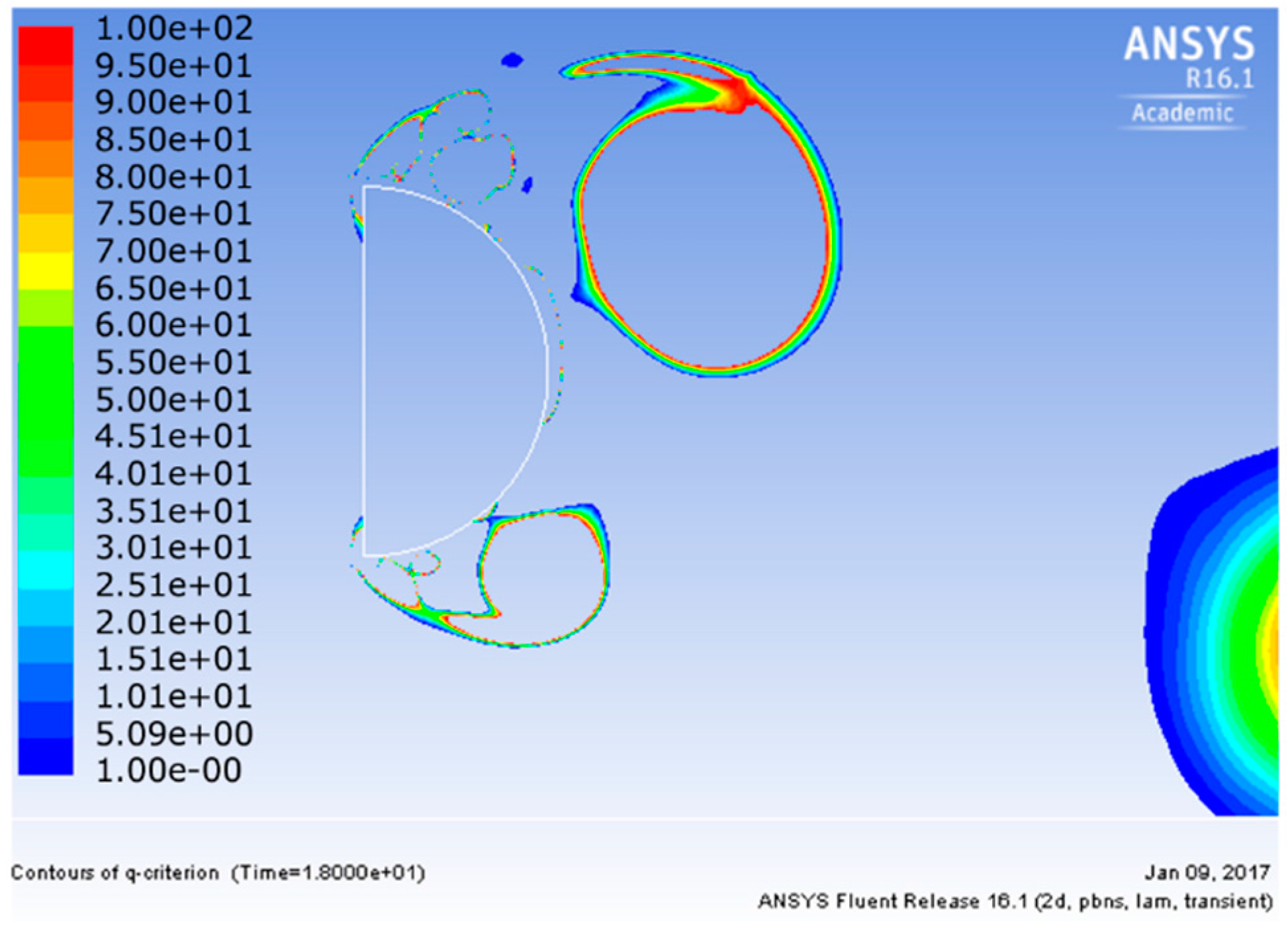
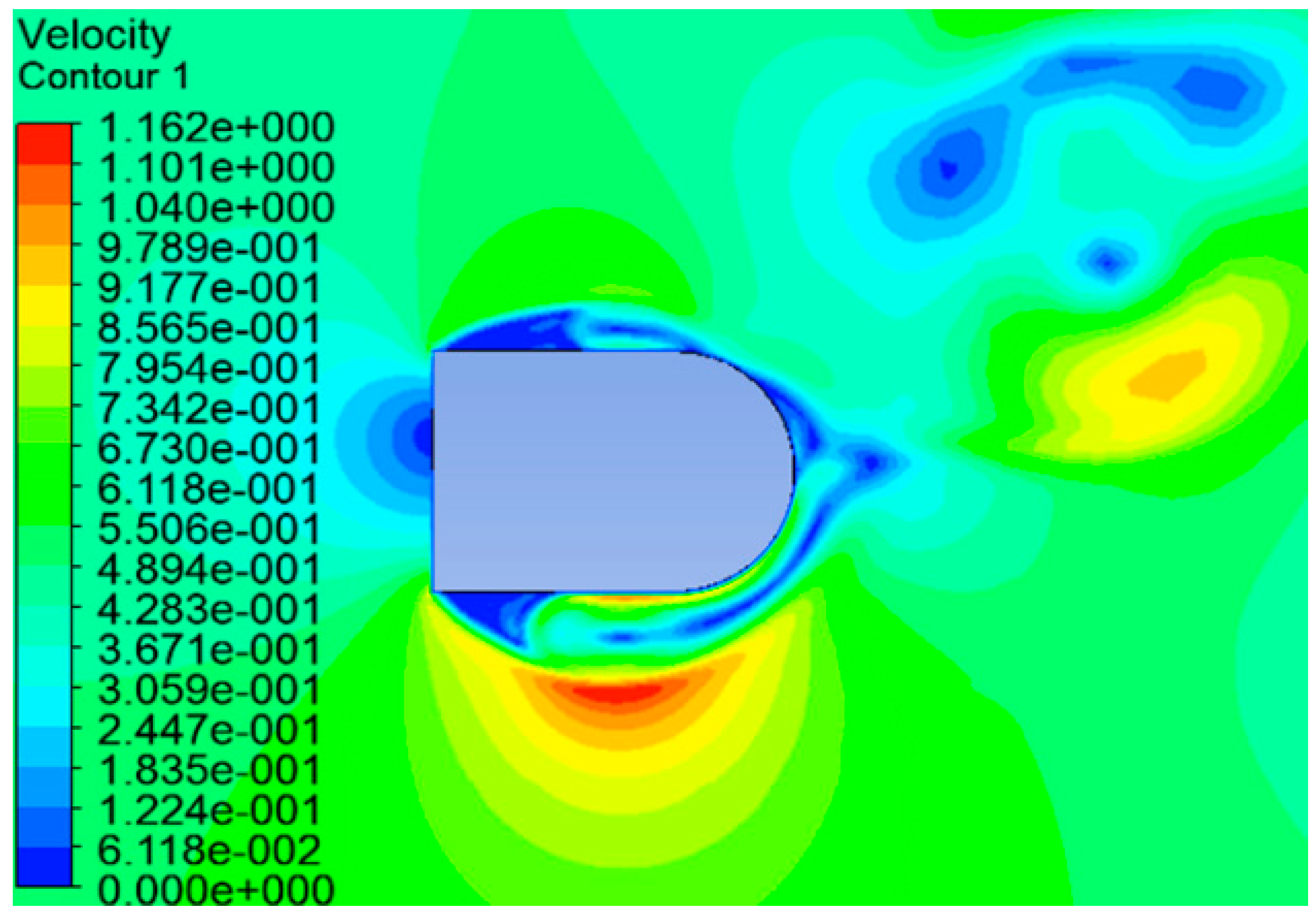
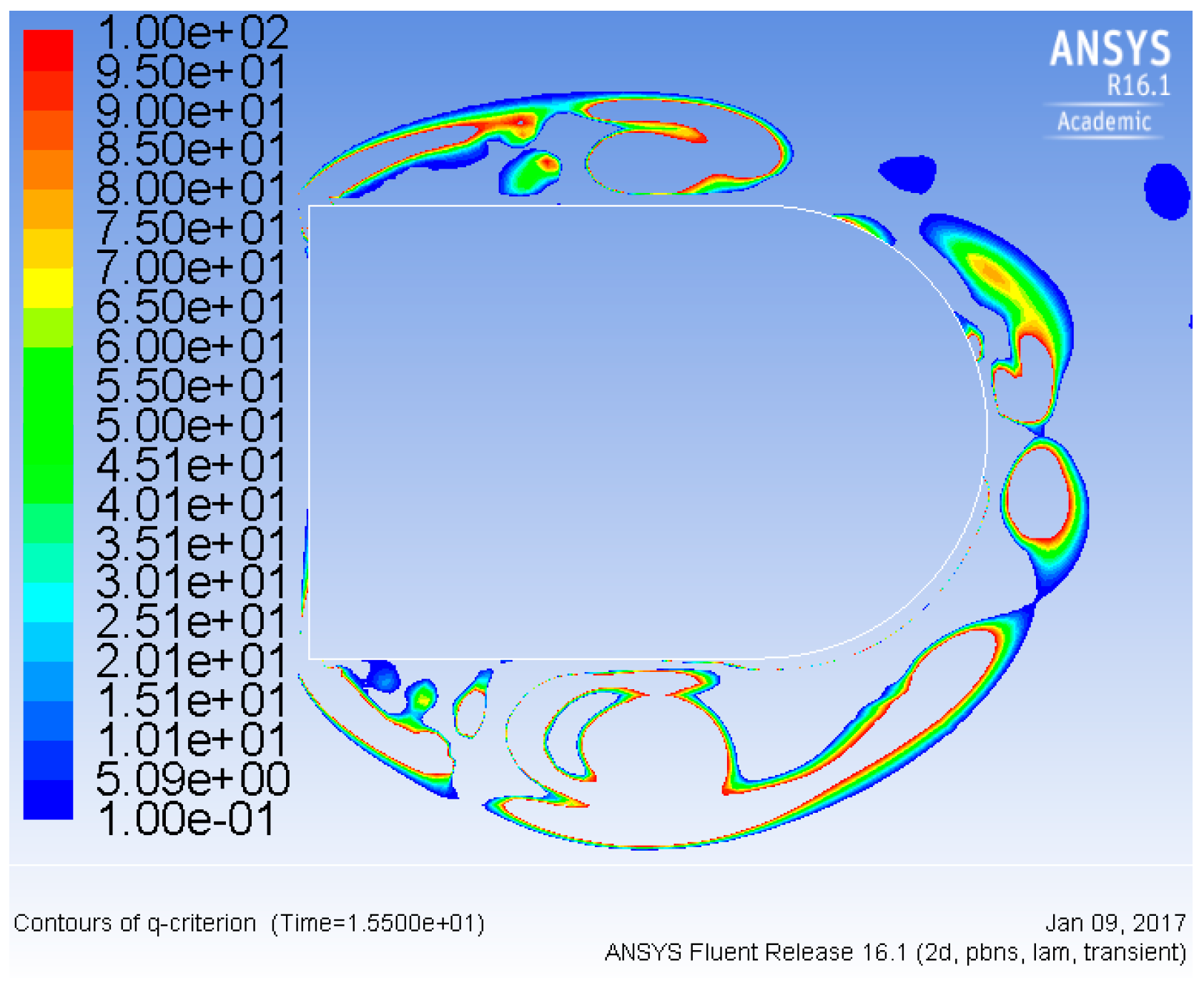
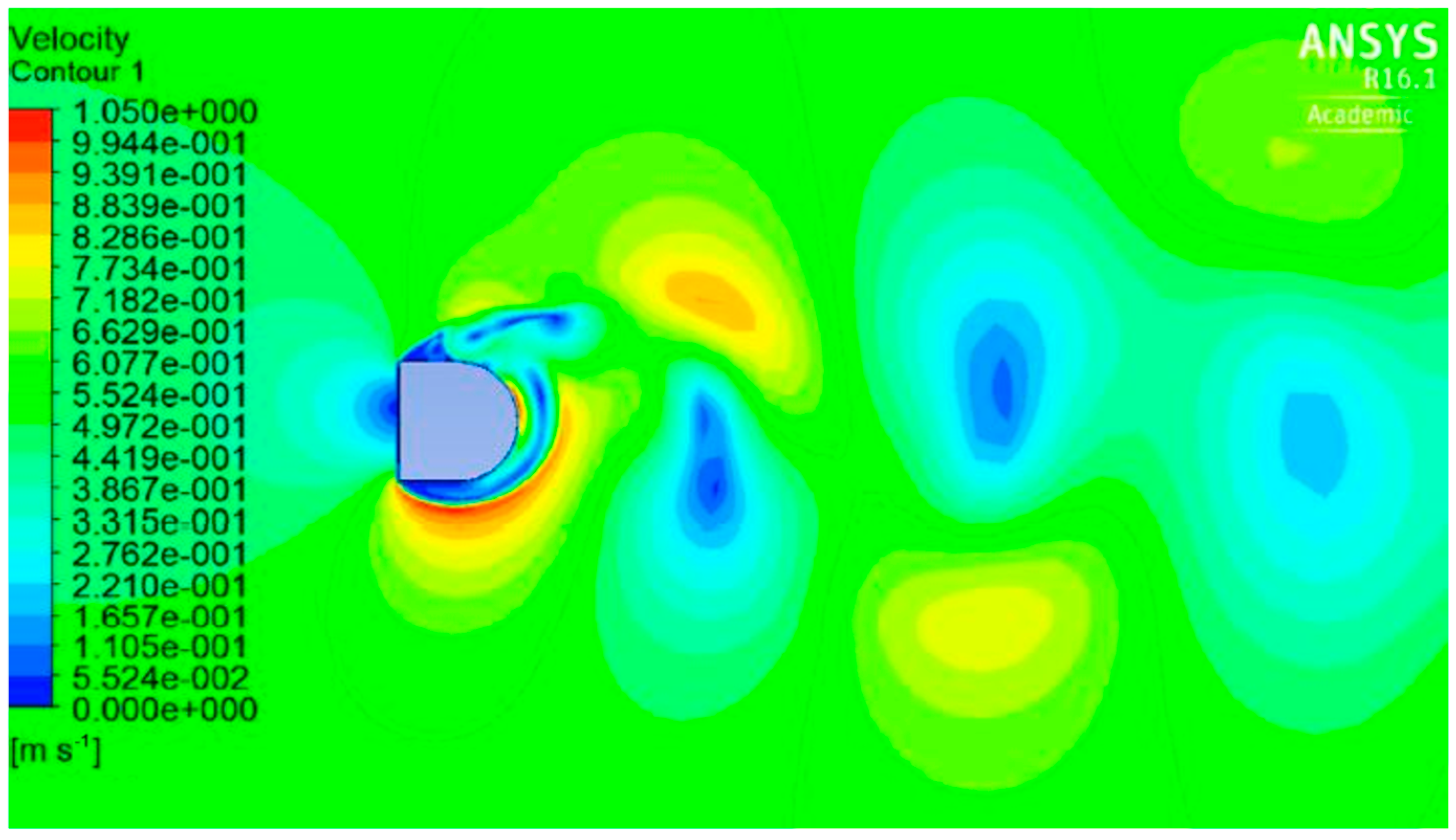
- Analysis of the flow field for six common head shapes clearly showed that the discontinuous flow caused by a square-headed oscillator results in higher Cl due to intense vortex shedding. Stable operation can be achieved by selecting the optimum length to width ratio, and this ratio is confirmed to be one (square) by our simulation.
- (3)
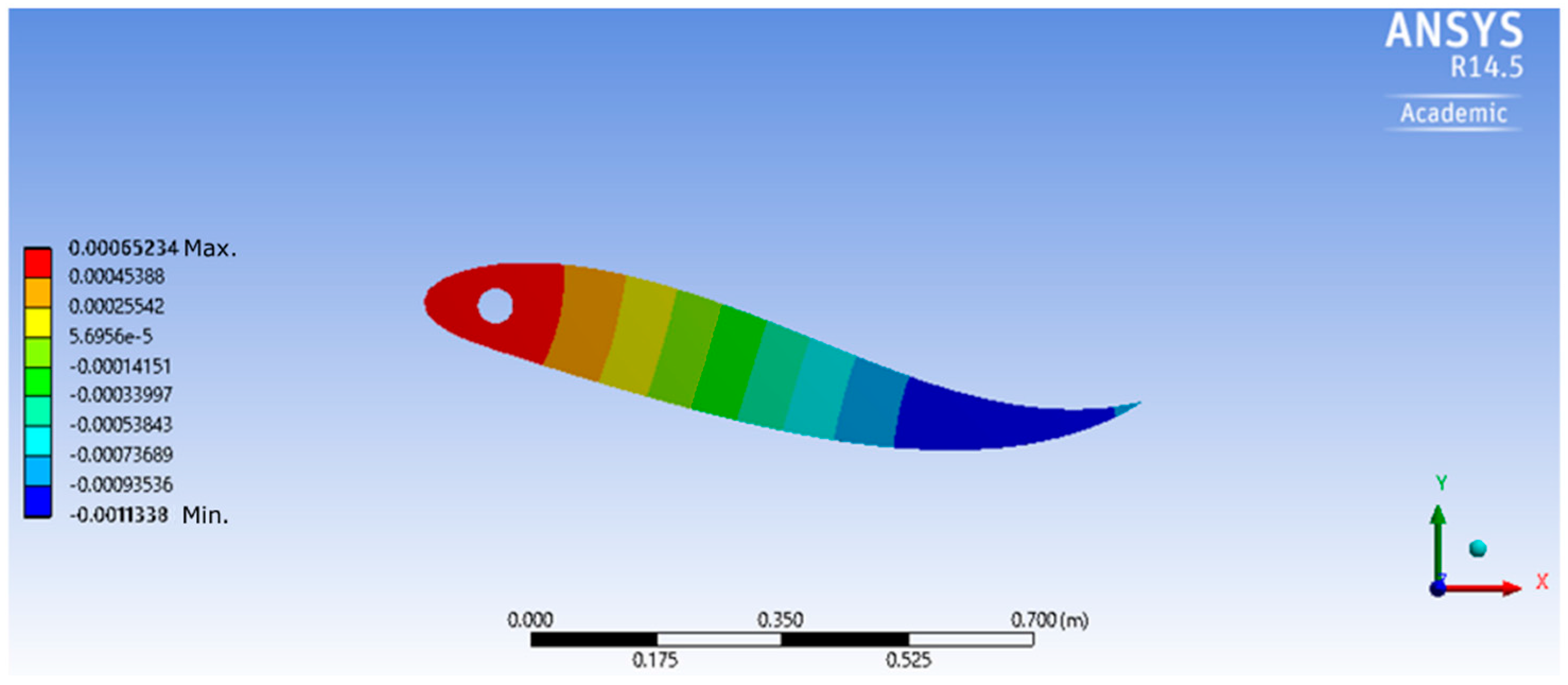
- A shape with a higher Cl than the semicircle has been identified, and the efficacy of this shape was confirmed in the fluid-structure coupled analysis.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yamamoto, I. Practical Robotics and Mechatronics: Marine, Space and Medical Applications; IET: Croydon, UK, 2016; pp. 1–192. [Google Scholar]
- Yamamoto, I. Propulsion system with flexible/rigid oscillating fin. IEEE J. Ocean. Eng. 1995, 20, 23–30. [Google Scholar] [CrossRef]
- Yamamoto, I.; Terada, Y.; Nagamatu, T.; Imaizumi, Y. Research on an oscillating fin propulsion control system. In Proceedings of the OCEANS ‘93: Engineering in Harmony with Ocean, Victoria, BC, Canada, 18–21 October 1993. [Google Scholar] [CrossRef]
- University of Michigan. Available online: http://www.vortexhydroenergy.com/ (accessed on 30 November 2016).
- Abiru, H.; Yoshitake, A. Experimental Study on a Cascade Flapping Wing Hydroelectric Power Generator. J. Energy Power Eng. 2012, 6, 1429–1436. [Google Scholar]
- Hiejima, S.; Nakano, S. Experimental study on control parameters for aerodynamic vibration-based power generation using feedback amplification. J. Jpn. Soc. Civ. Eng. 2012, 68, 88–97. [Google Scholar] [CrossRef]
- Hiejima, S.; Hiyoshi, Y. Vibrational amplification technique for power generation using wind-induced vibration. Wind Energy 2010, 34, 135–141. [Google Scholar]
- Annual Report on the Environment in Japan 2016. Available online: http://www.env.go.jp/en/wpaper/2016/pdf/2016_all.pdf (accessed on 14 October 2017).
- Rodríguez, I.; Lehmkuhl, O.; Chiva, J.; Borrell, R.; Oliva, A. On the flow past a circular cylinder from critical to super-critical Reynolds numbers: Wake topology and vortex shedding. Int. J. Heat Fluid Flow 2015, 55, 91–103. [Google Scholar] [CrossRef] [Green Version]
- Hu, W. Hydrodynamic study on a pectoral fin rowing model of a fish. J. Hydrodyn. 2009, 21, 463–472. [Google Scholar] [CrossRef]
- Xu, Y.; Wan, D. Numerical simulations of fish swimming with rigid pectoral fins. J. Hydrodyn. 2012, 24, 263–272. [Google Scholar] [CrossRef]
- ANSYS (Flunet, Mechanical) User’s Manual in Japanese. Available online: http://tsubame.gsic.titech.ac.jp/docs/guides/isv-apps/fluent/pdf/Fluent.pdf (accessed on 14 October 2017).
- Sun, X.; Kato, N.; Li, H. Effects of cross section and flexibility of pectoral fins on the swimming performance of biomimetic underwater vehicles. J. Jpn. Soc. Nav. Archit. Ocean Eng. 2012, 15, 175–189. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Step Size for Flow Calc. (s) | 0.005 |
| Scale of flow domain (m) | 6 × 3 × 0.1 |
| Type of mesh | prism |
| Min. size of mesh (m) | 0.007 |
| Density of structure (kg/m3) | 1000 |
| Length of structure (m) | 1 |
| Depth of structure (m) | 0.1 |
| Shape | x/y | Max to Circle’s | Periodic | Stability | Cd * to Circle | |
|---|---|---|---|---|---|---|
| 1 |  | 0.5 | 1.53 | good | not good | 1.67 |
| 2 |  | 1 | 1.92 | good | not good | 1.67 |
| 3 |  | 1.4 | 3.2 | detected | Very poor | 1.67 |
| 4 |  | 2.5 | 1.3 | excellent | excellent | 0.5 |
| 5 |  | 1 | 1.53 | excellent | good | 1.67 |
| 6 |  | 1 | 1.97 | excellent | excellent | 1.67 |
| Flow time step size (s) | 0.005 |
| Flow domain scale (m) | 3 × 2 × 0.1 |
| Flow domain mesh type | prism |
| Min. size of mesh (m) | 0.017 |
| Weight of struc. model (kg) | 1.62 |
| Size of model 1 (m) | 0.075 × 0.15 × 0.1 |
| Size of model 2 (m) | 0.15 × 0.15 × 0.1 |
| Size of model 3 (m) | 0.18 × 0.15 × 0.1 |
| Dia. of hole in models (m) | 0.04 |
| Elastic base (N/m3) | 48,000 |
| Model | Size in x-direc. (m) | Max | Max Disp. (m) |
|---|---|---|---|
| No.1 | 0.075 | 7 | 0.0120 |
| No.2 | 0.15 | 8.8 | 0.0213 |
| No.3 | 0.18 | 10 | 0.0198 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamamoto, I.; Rong, G.; Shimomoto, Y.; Lawn, M. Numerical Simulation of an Oscillatory-Type Tidal Current Powered Generator Based on Robotic Fish Technology. Appl. Sci. 2017, 7, 1070. https://doi.org/10.3390/app7101070
Yamamoto I, Rong G, Shimomoto Y, Lawn M. Numerical Simulation of an Oscillatory-Type Tidal Current Powered Generator Based on Robotic Fish Technology. Applied Sciences. 2017; 7(10):1070. https://doi.org/10.3390/app7101070
Chicago/Turabian StyleYamamoto, Ikuo, Guiming Rong, Yoichi Shimomoto, and Murray Lawn. 2017. "Numerical Simulation of an Oscillatory-Type Tidal Current Powered Generator Based on Robotic Fish Technology" Applied Sciences 7, no. 10: 1070. https://doi.org/10.3390/app7101070