
Discrete-Time Sliding Mode Filter with Adaptive Gain


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Overview of Related Works
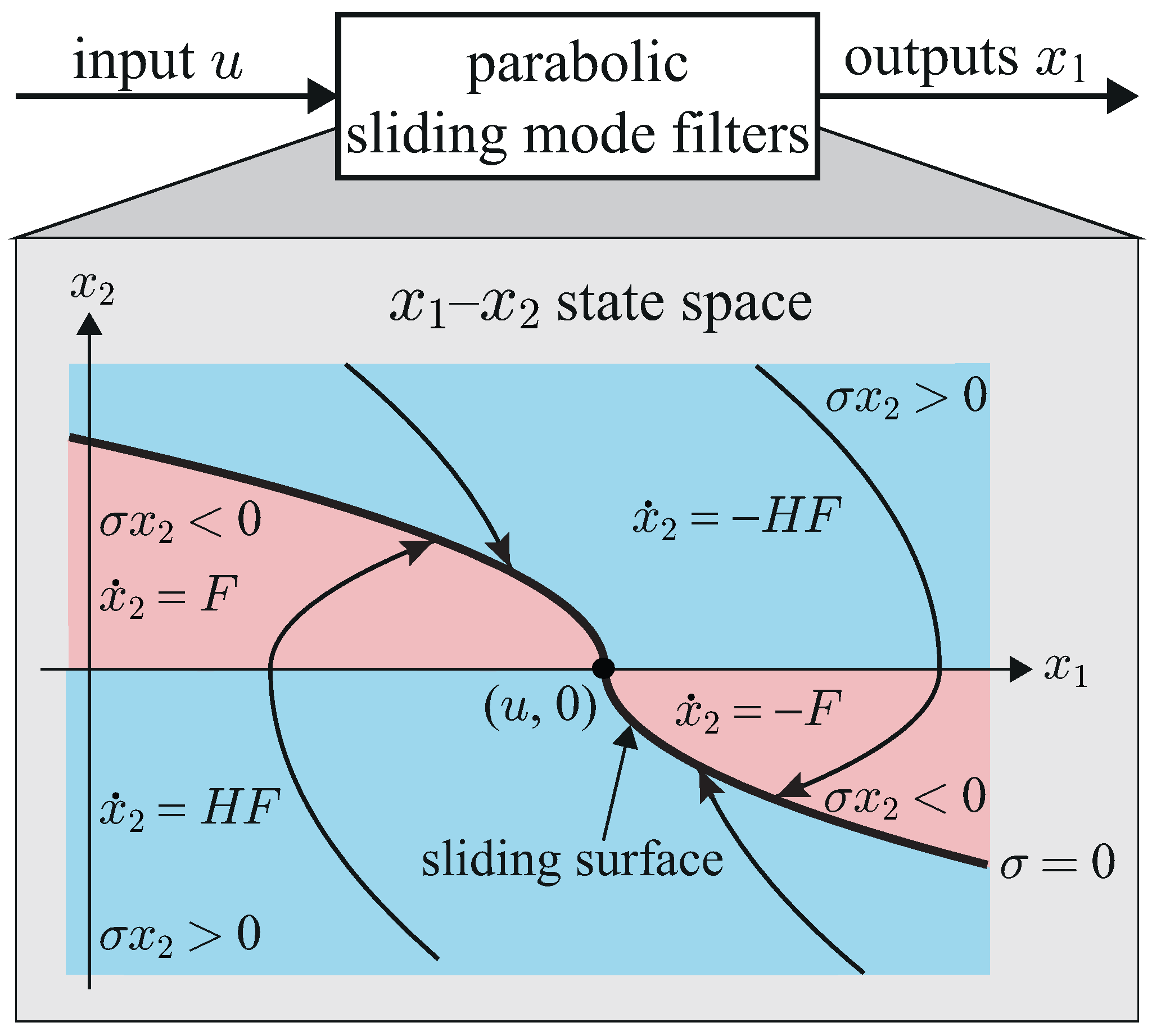
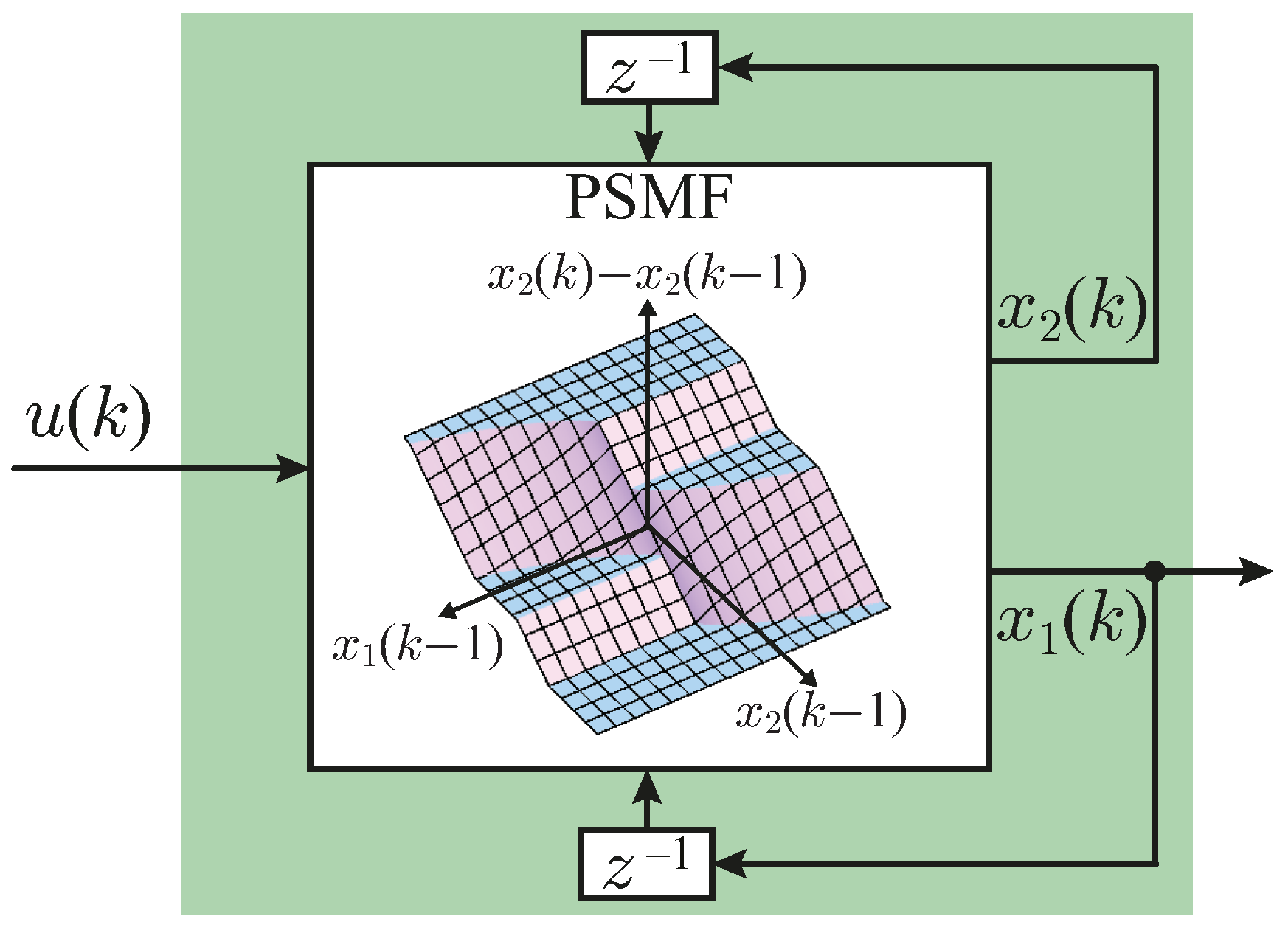
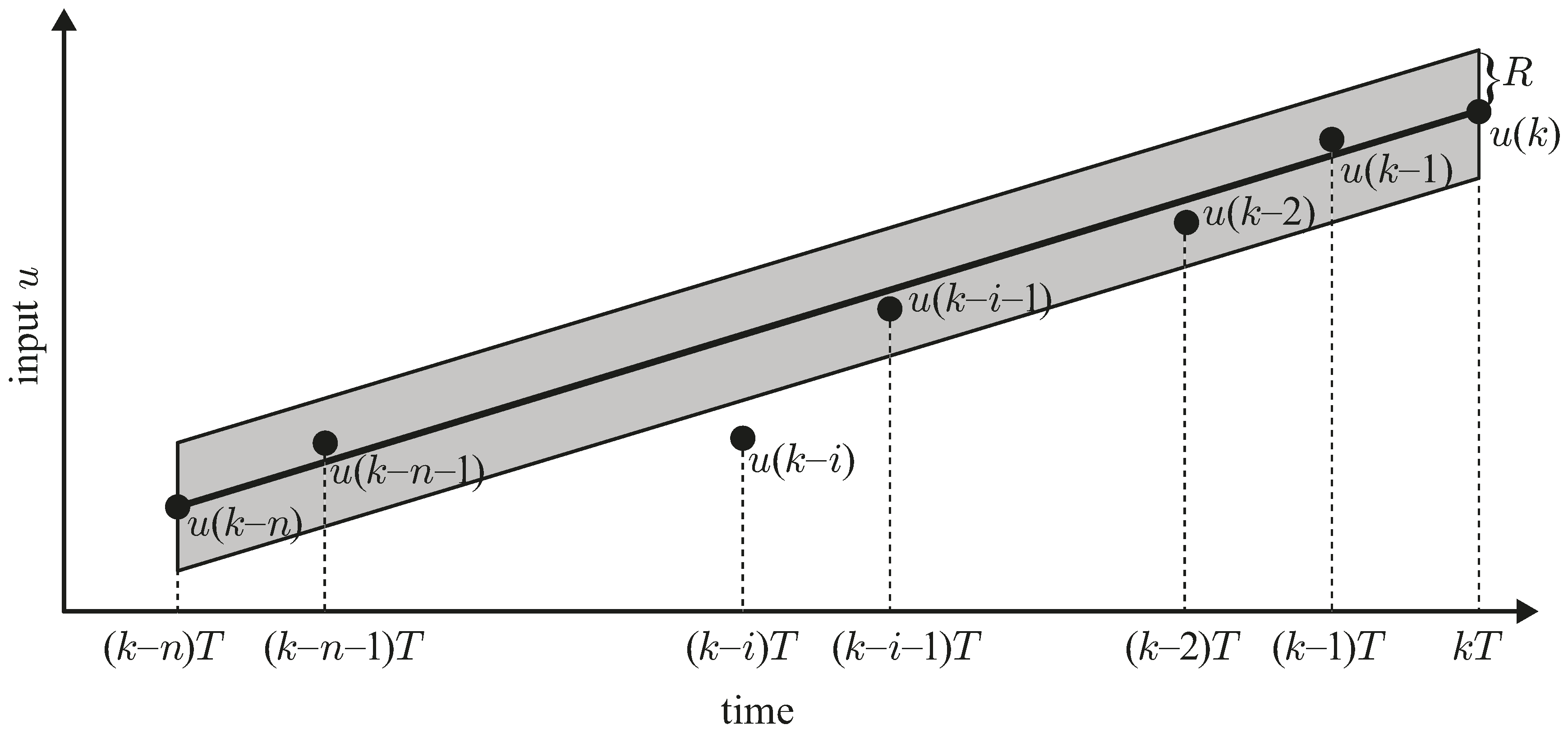
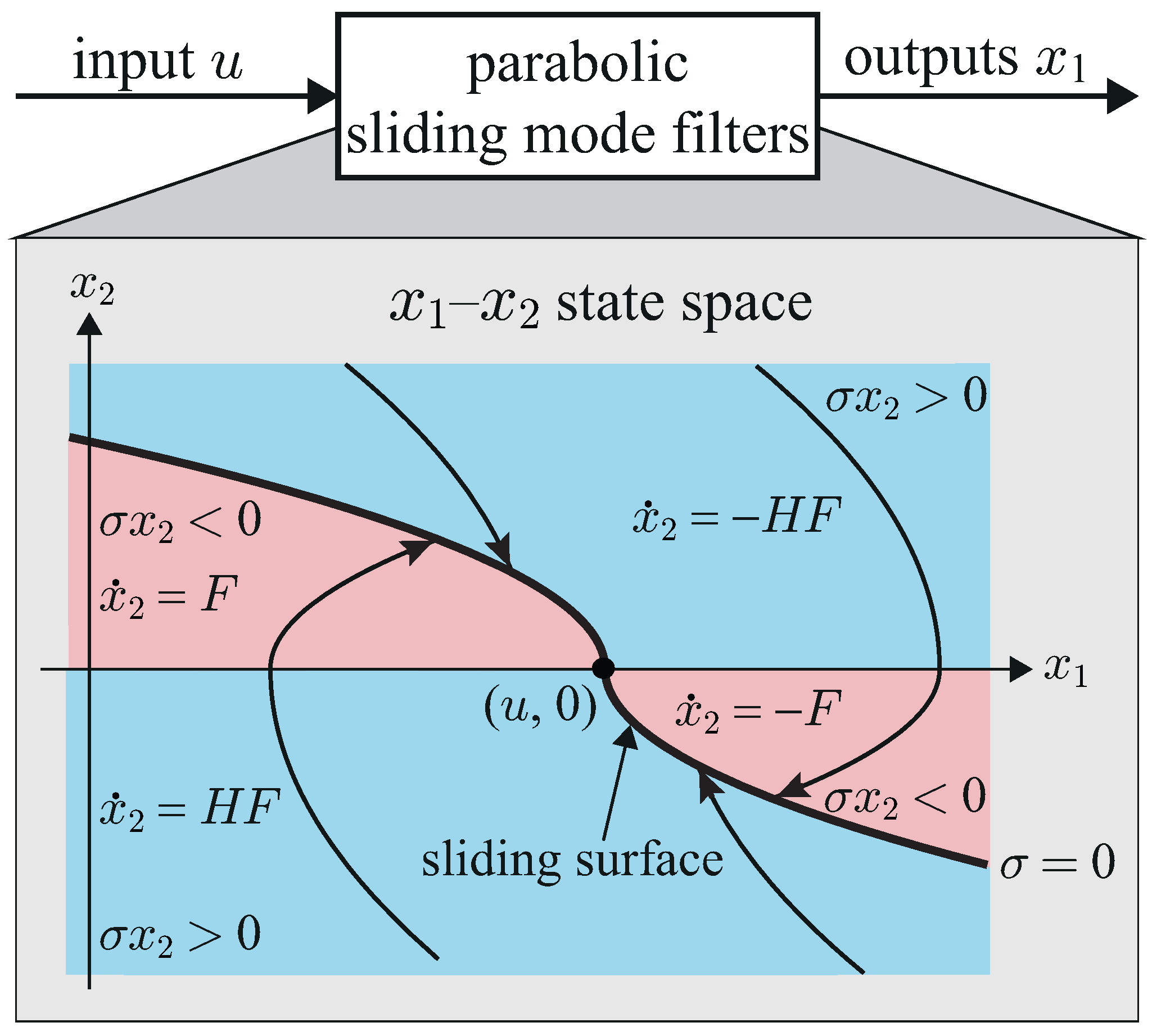
2.1. Parabolic Sliding Mode Filters
| Algorithm 1 PSMF |
|
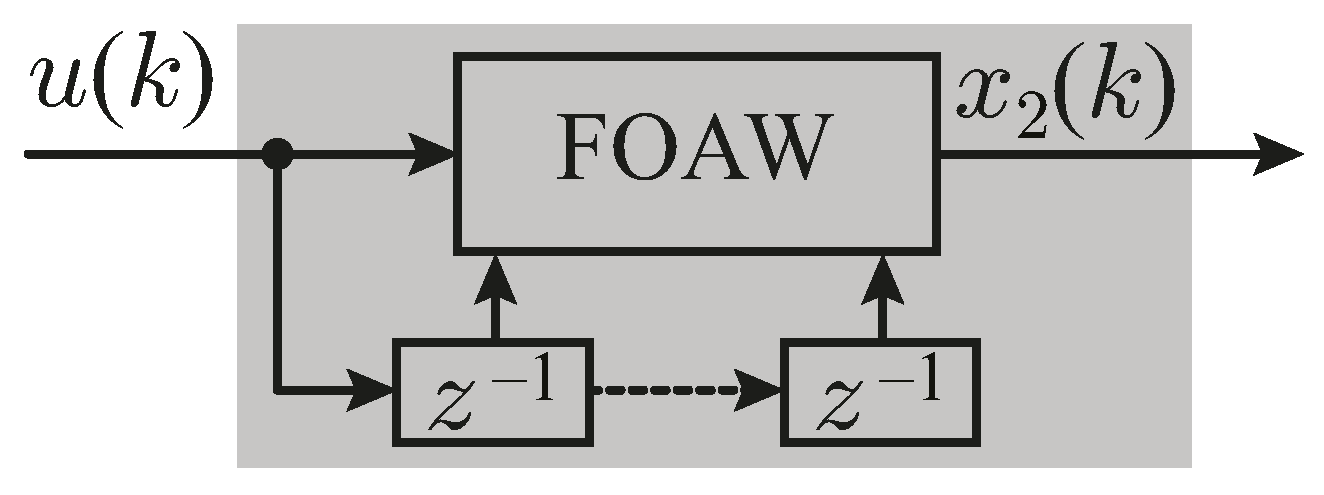
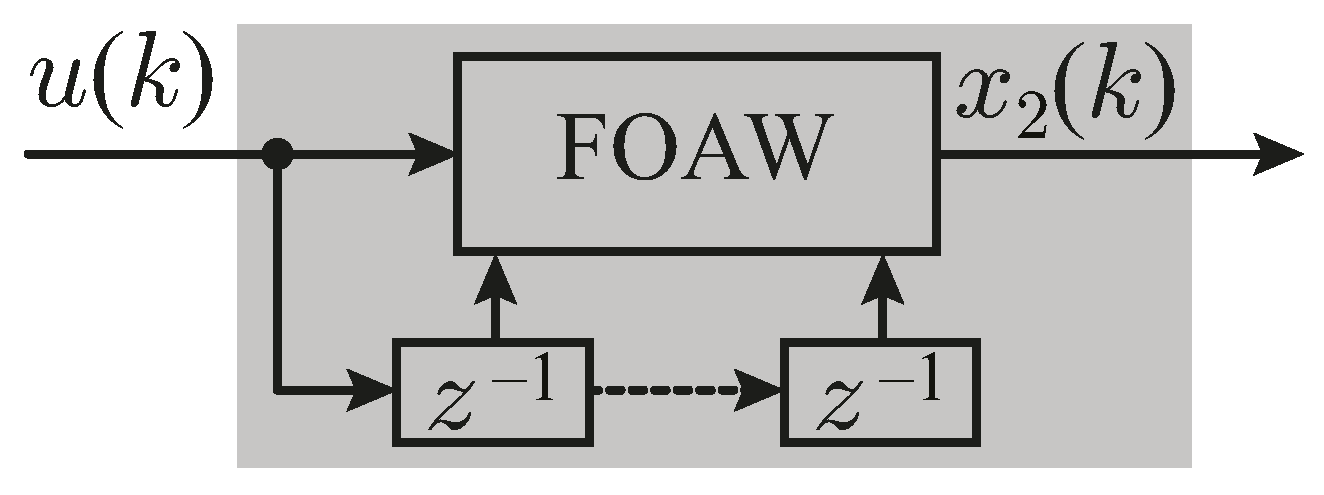
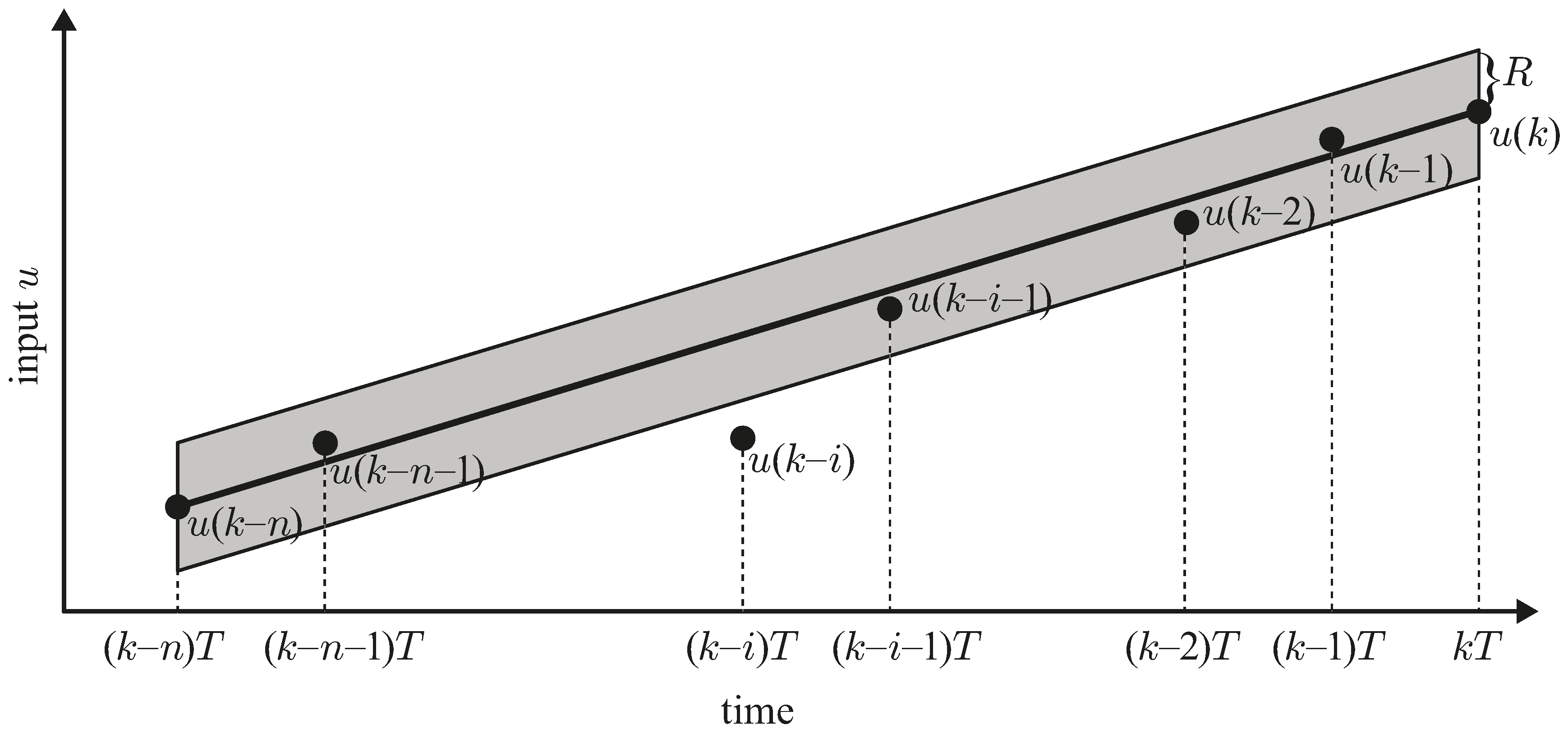
2.2. First-Order Adaptive Windowing
| Algorithm 2 FOAW |
|
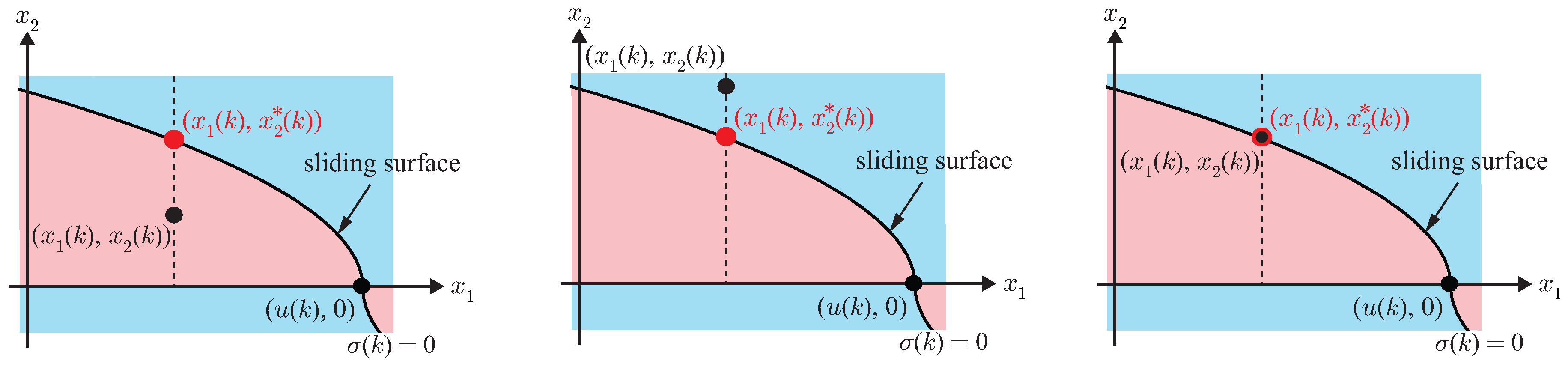
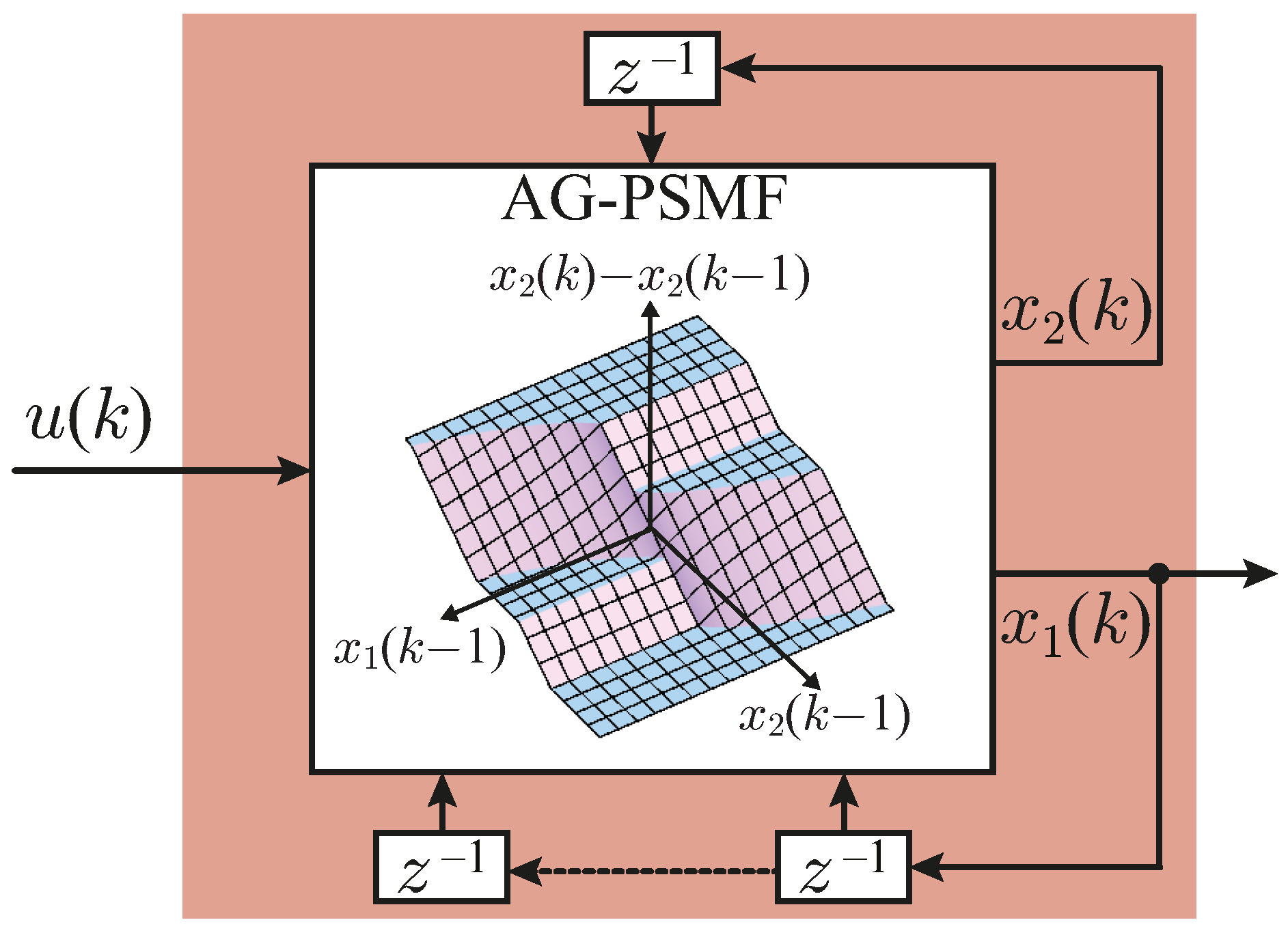
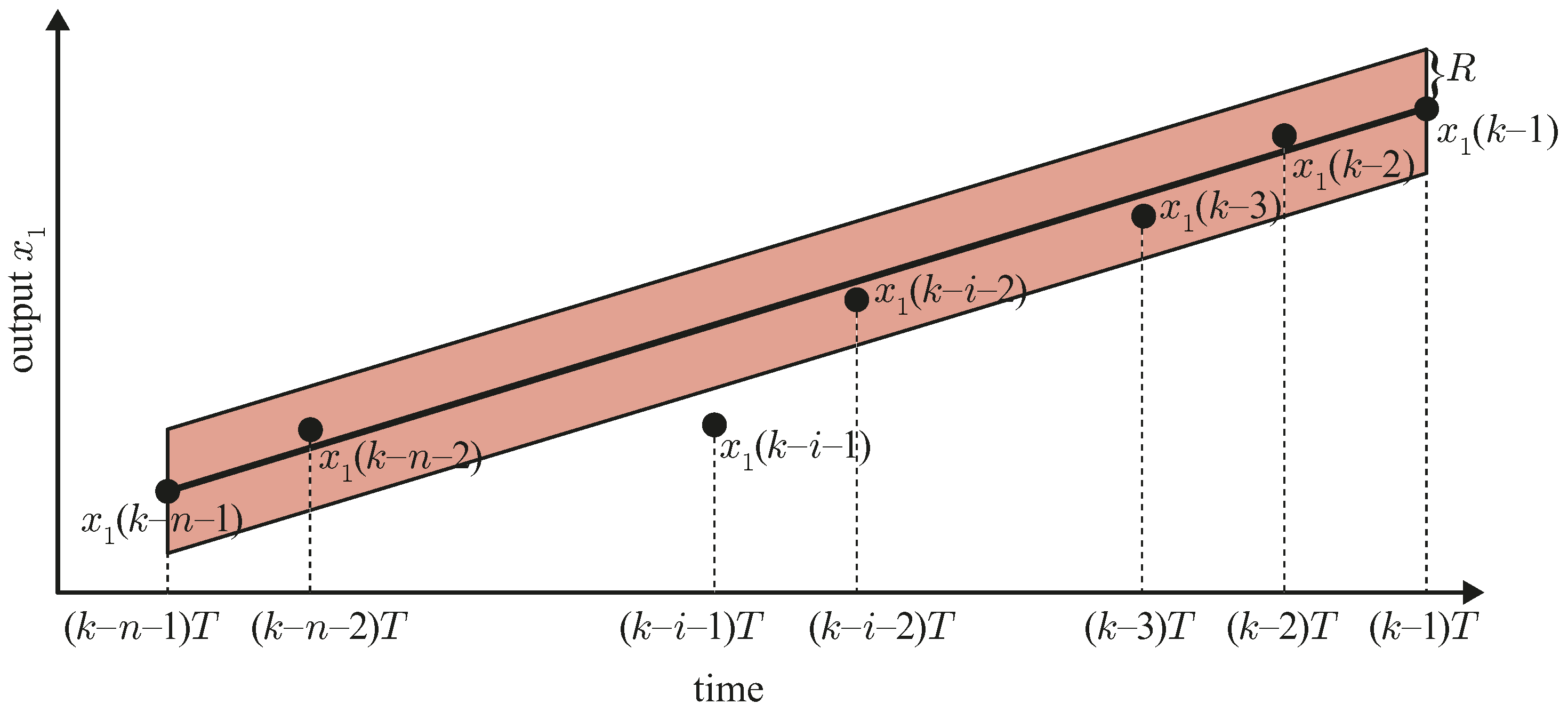
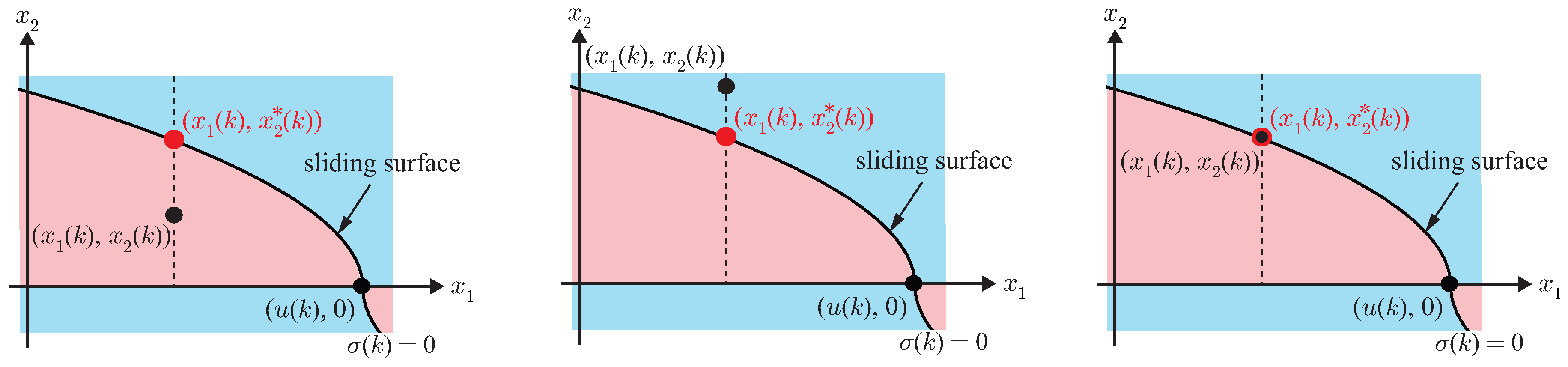
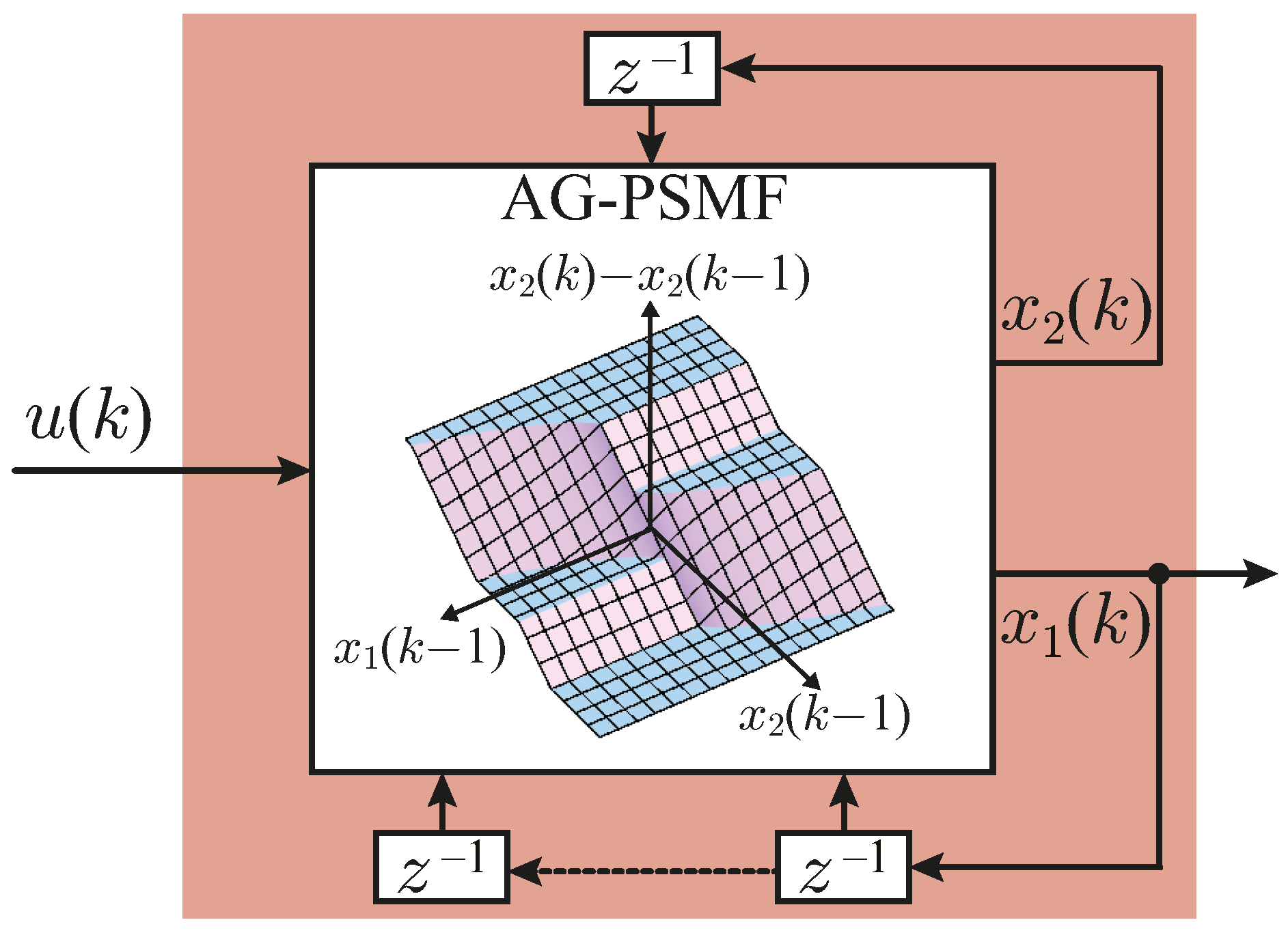
3. Discrete-Time Sliding Mode Filter with Adaptive Gain
| Algorithm 3 AG-PSMF | |
| 1: | |
| 2: | |
| 3: | |
| 4: | |
| 5: | |
| 6: | |
| 7: | |
| 8: | |
| 9: | |
| 10: | |
| 11: | |
| 12: | |
| 13: | , |
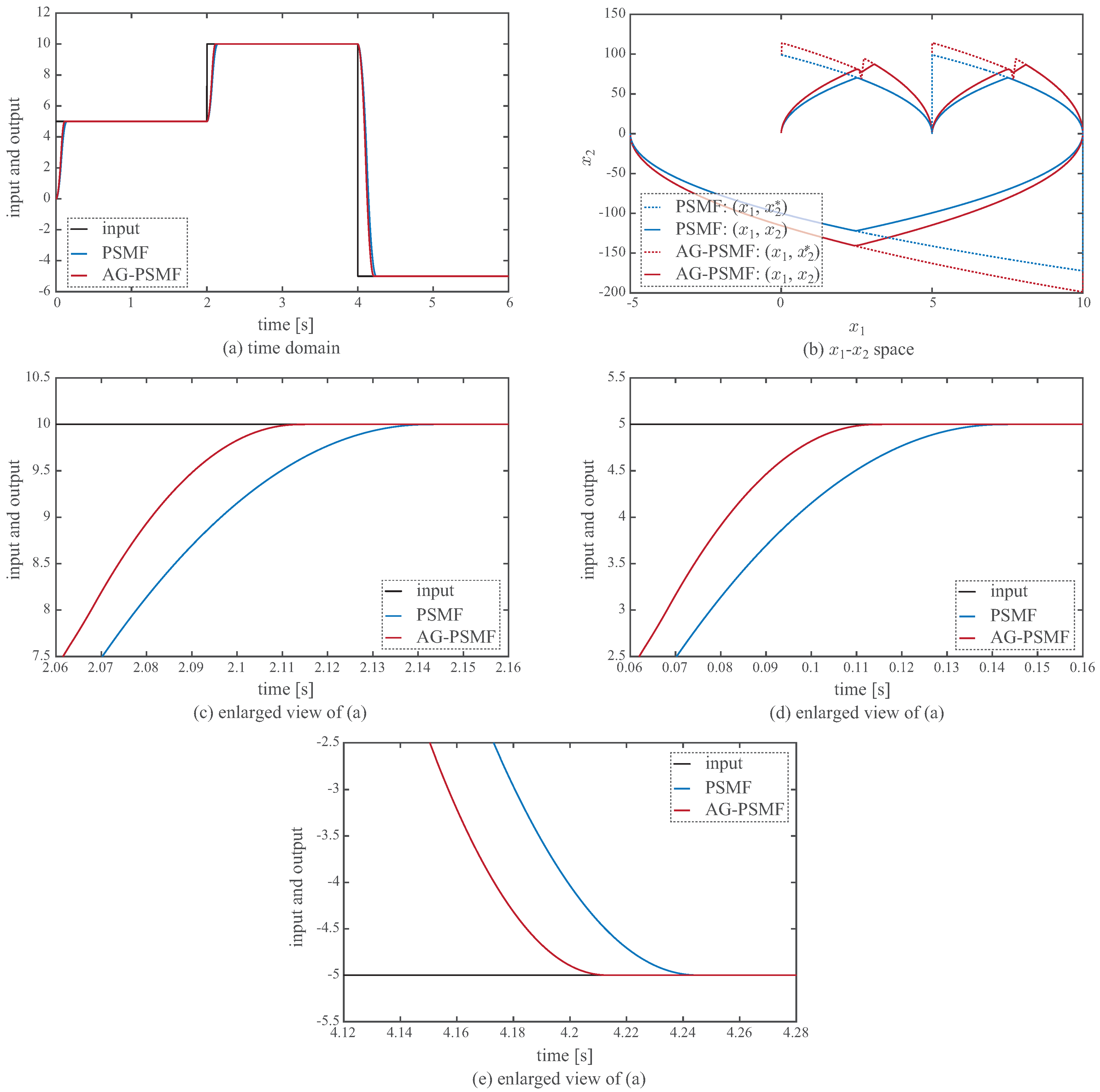
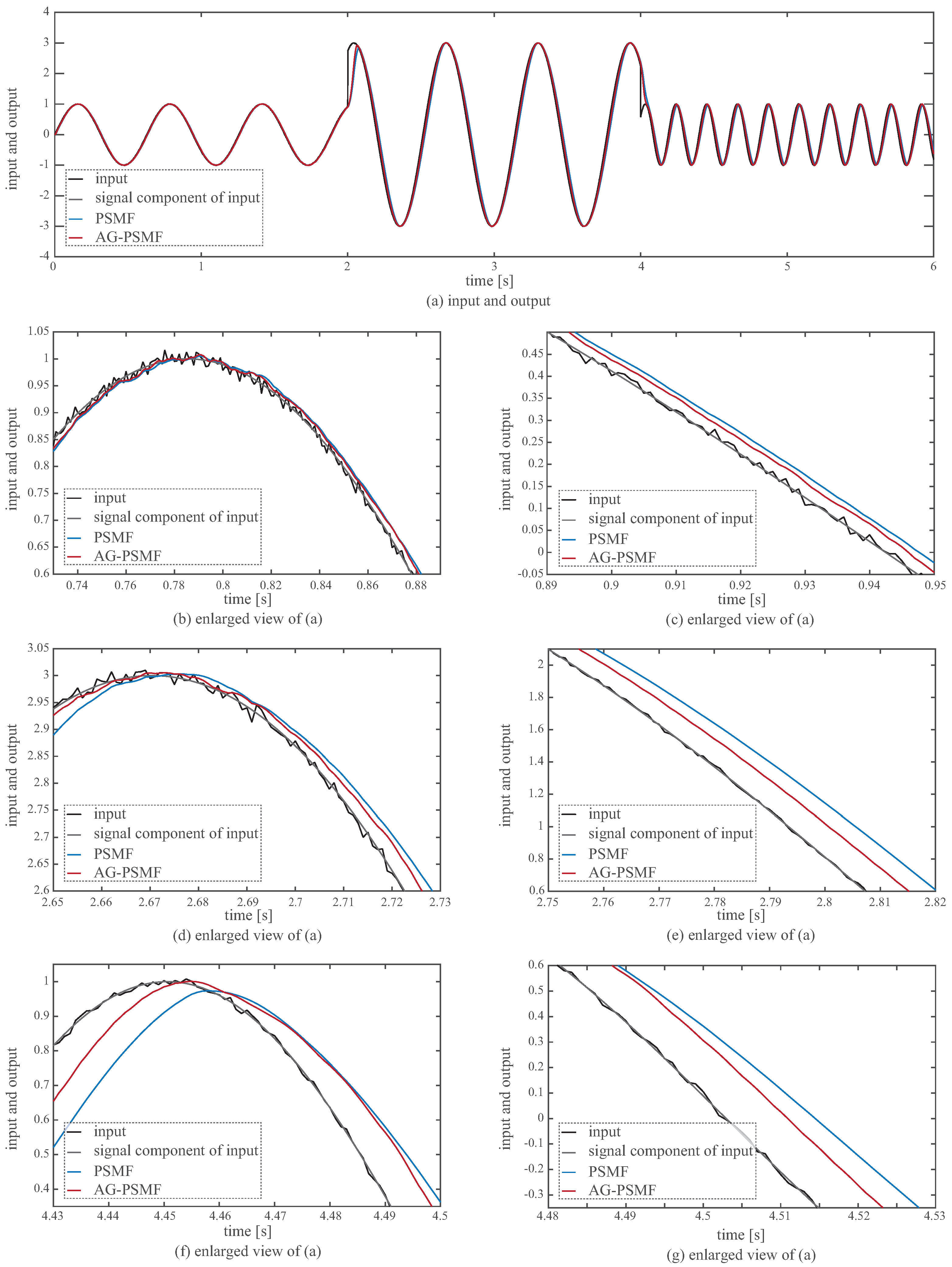
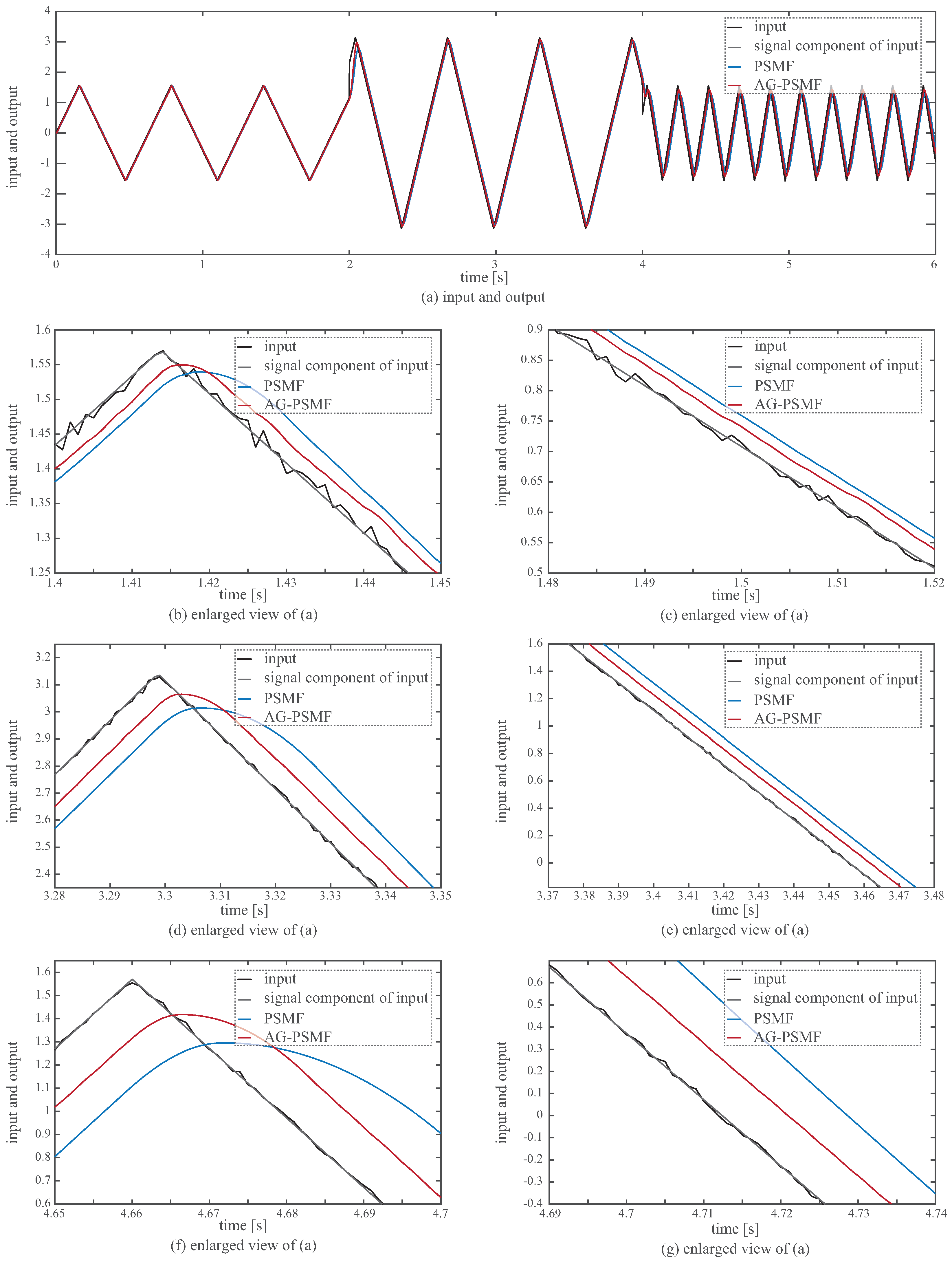
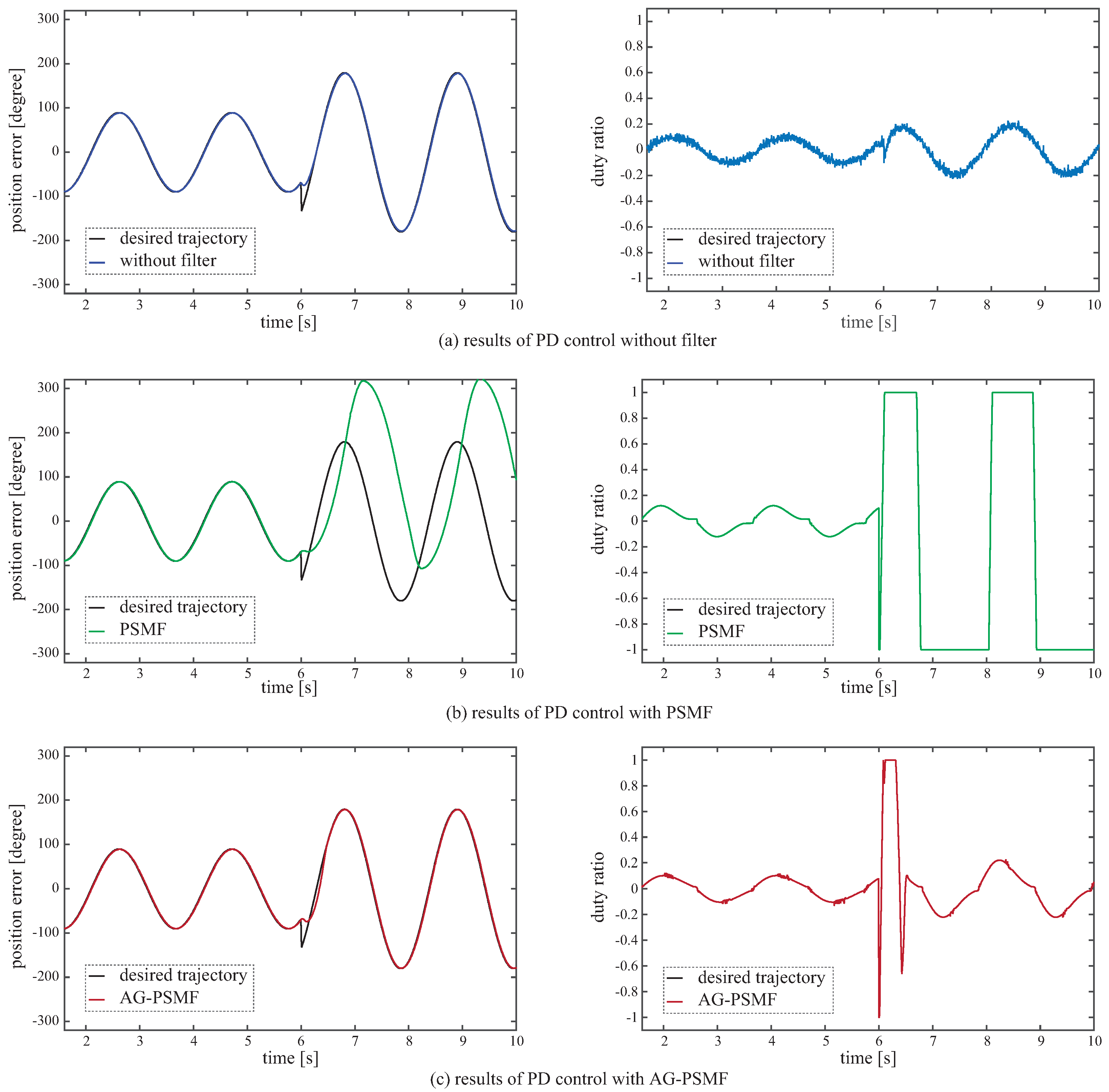
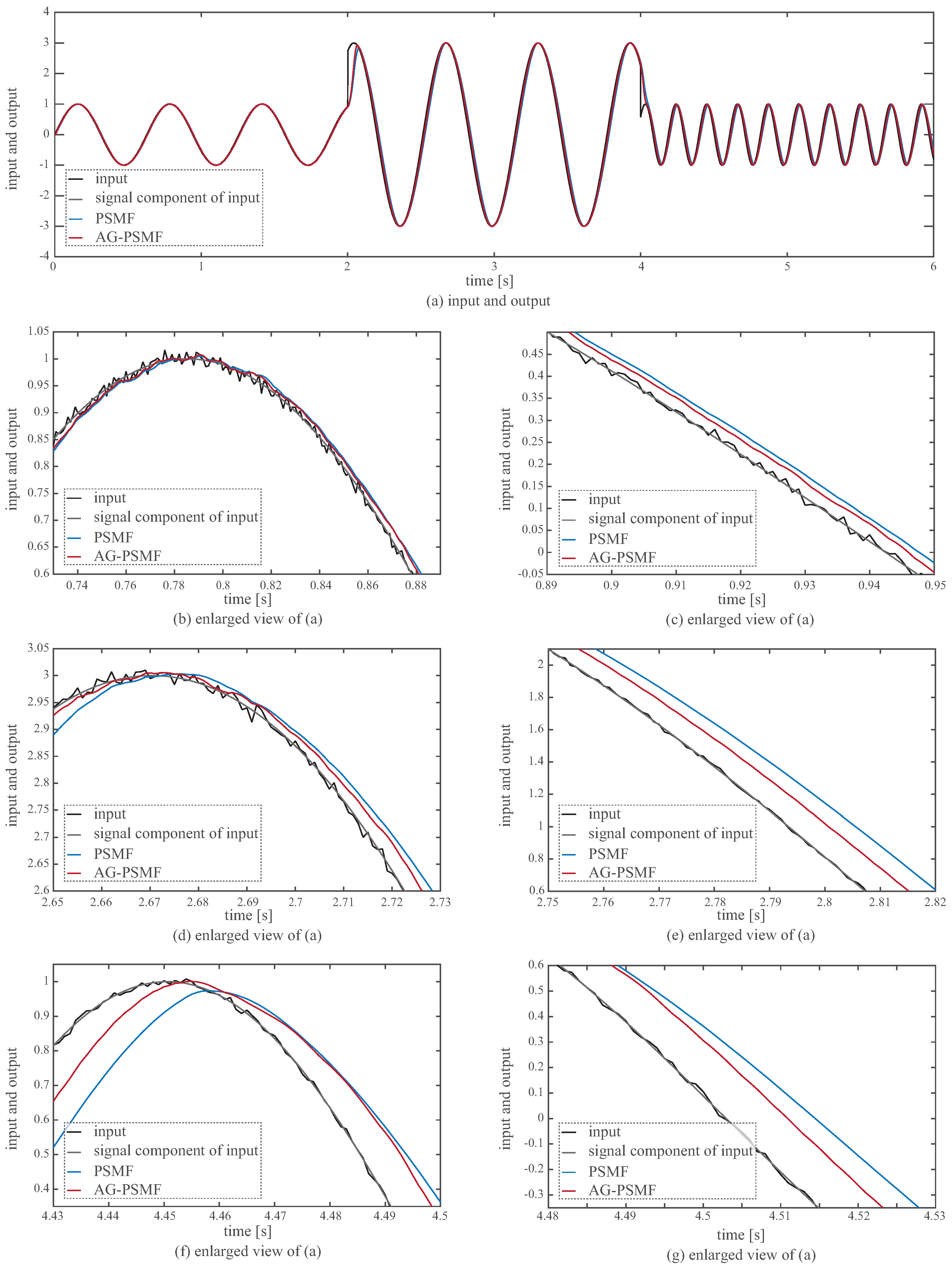
4. Numerical Examples
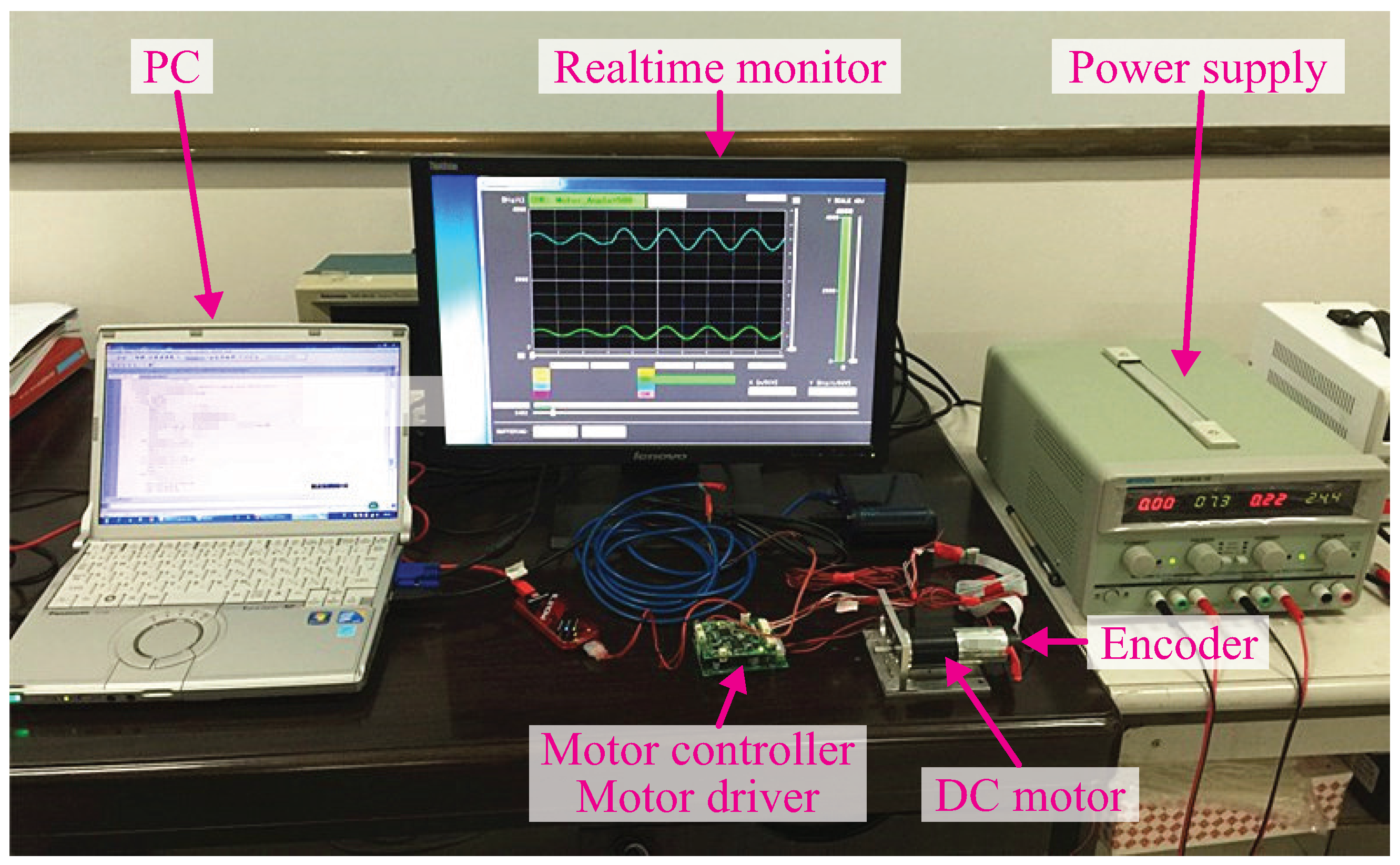
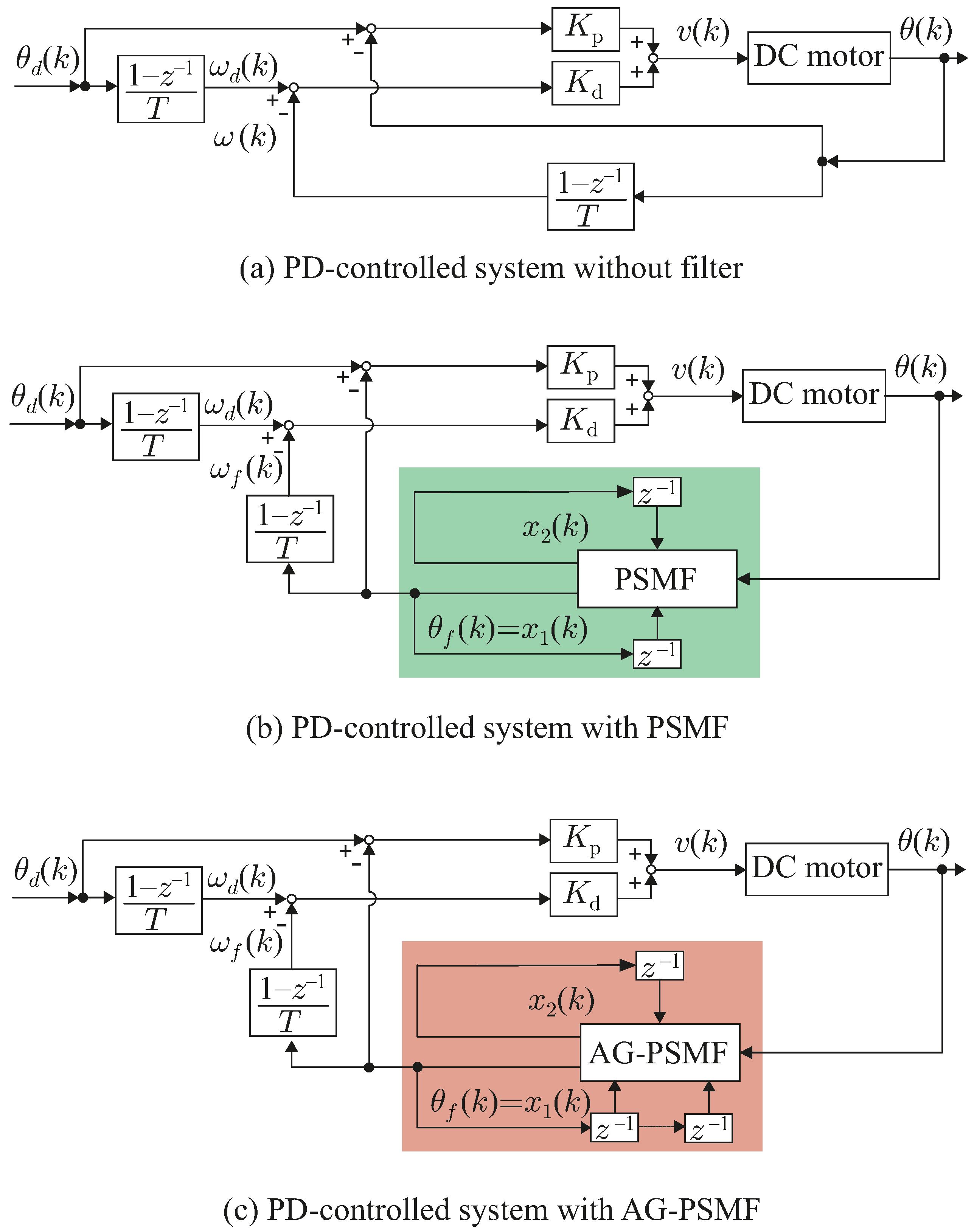
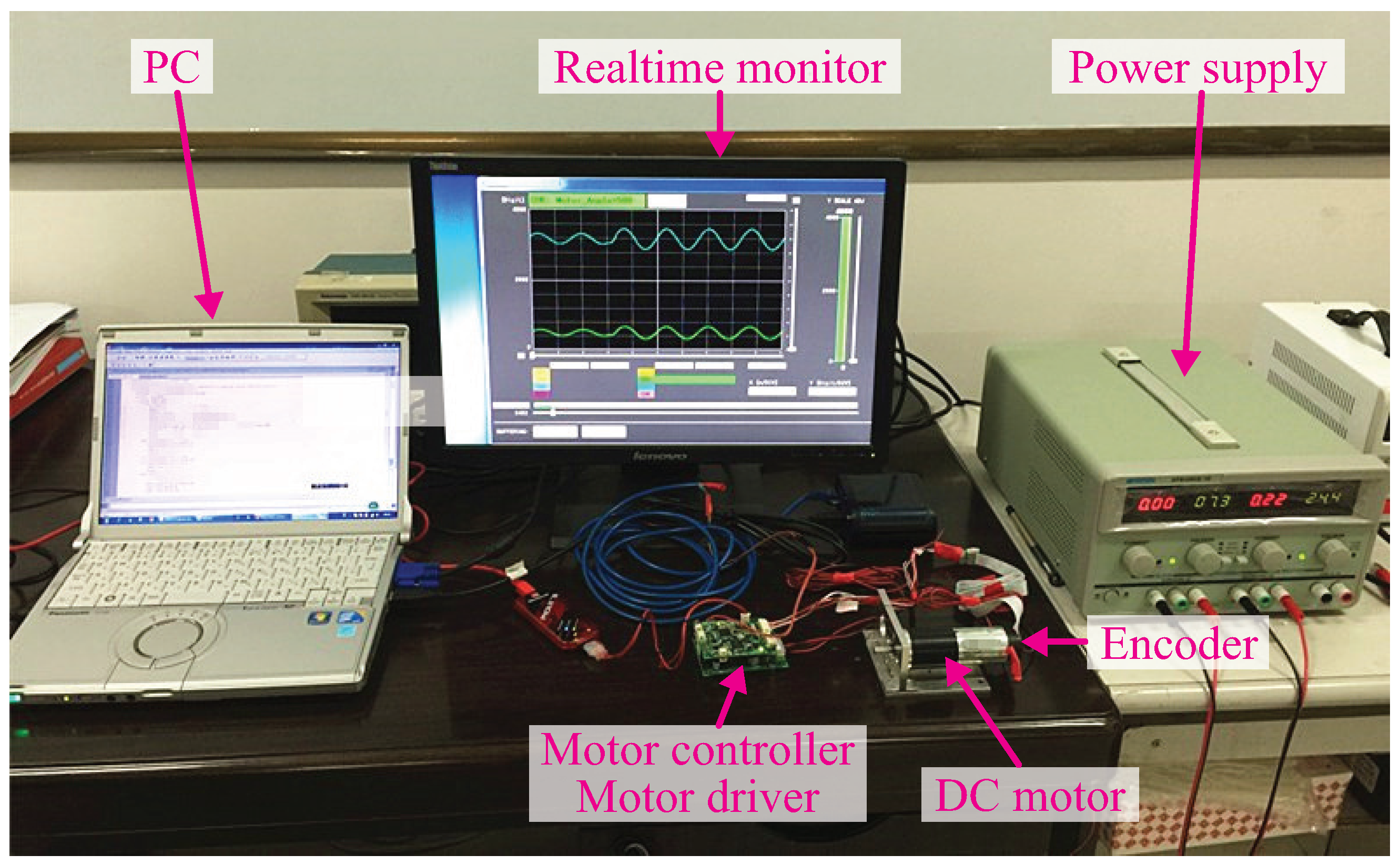
5. Experimental Evaluation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| 2-LPF | Second-order Butterworth low-pass filter |
| PSMF | Parabolic sliding mode filter |
| FOAW | First-order adaptive windowing |
| AG-PSMF | Parabolic sliding mode filter with adaptive gain |
| u | Input of PSMF and AG-PSMF |
| Output of PSMF and AG-PSMF | |
| and | Derivatives of and , respectively |
| F | Acceleration gain of PSMF and AG-PSMF |
| d | Duty ratio |
| Desired trajectory | |
| θ | Current position |
| Desired velocity | |
| ω | Current velocity |
| Estimated position | |
| Estimated velocity | |
| v | Control voltage |
| Proportional gain | |
| Derivative gain | |
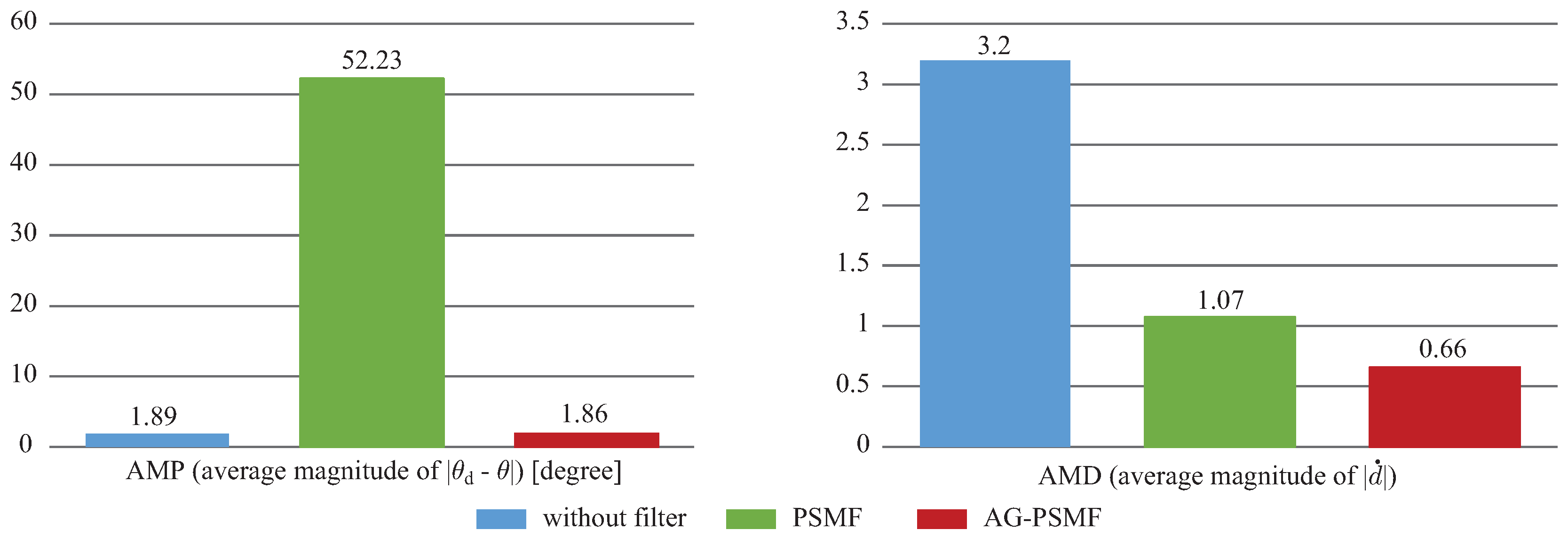
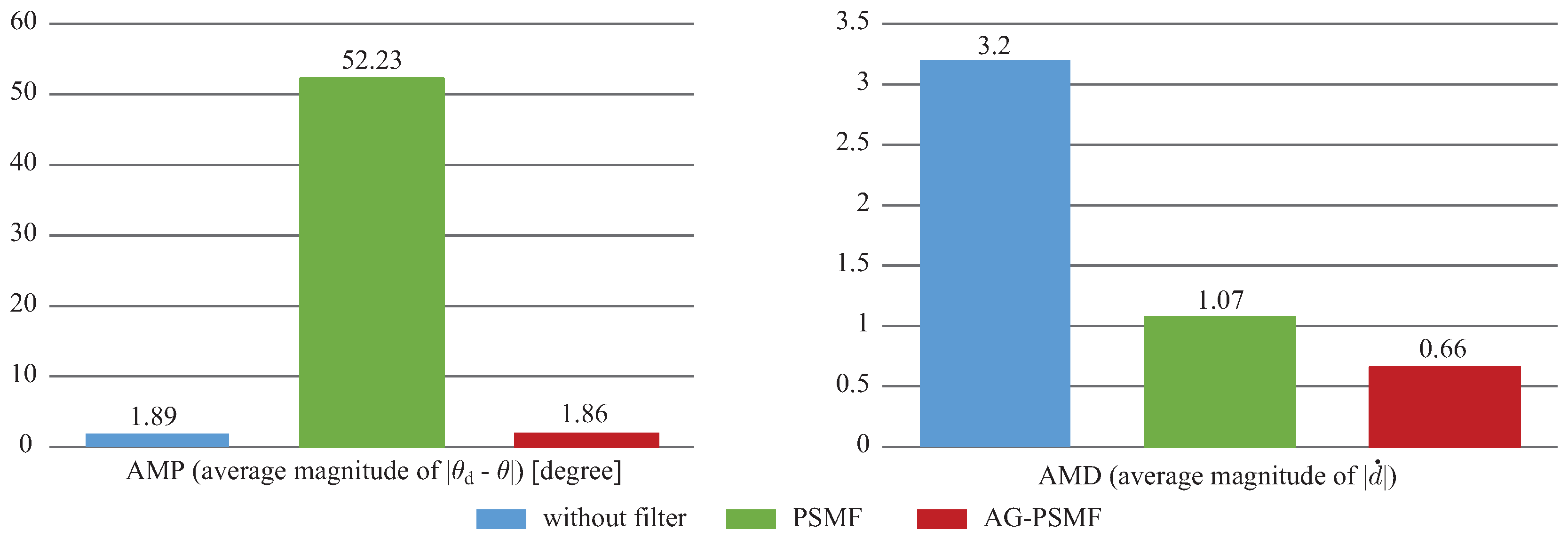
| AMP | Average magnitude of position error |
| AMD | Average magnitude of the duty-ratio (normalized control voltage v) change rate |
References
- Gallagher, N.; Gary, L. A theoretical analysis of the properties of median filters. IEEE Trans. Acoust. Speech Signal Proc. 1981, 29, 1136–1141. [Google Scholar] [CrossRef]
- Moshnyaga, V.; Hashimoto, K. An efficient implementation of 1-D median filter. In Proceedings of the 52nd IEEE International Midwest Symposium on Circuits and Systems, Cancun, Mexico, 2–5 August 2009; pp. 451–454.
- Hargrave, P. A tutorial introduction to Kalman filtering. In Proceedings of the IEE Colloquium on Kalman Filters: Introduction, Applications and Future Developments, London, UK, 21 February 1989; pp. 1–6.
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; Department of Computer Science, Technical Report TR; University of North Carolina: Chapel Hill, NC, USA, 1995. [Google Scholar]
- Levant, A. Robust exact differentiation via sliding mode technique. Automatica 1998, 34, 379–384. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Davila, J.; Fridman, L.; Levant, A. Second-order sliding-mode observer for mechanical systems. IEEE Trans. Autom. Control 2005, 50, 1785–1789. [Google Scholar] [CrossRef]
- M’Sirdi, N.; Rabhi, A.; Fridman, L.; Davila, J.; Dalanne, Y. Second order sliding mode observer for estimation of velocities, wheel sleep, radius and stiffness. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 3316–3321.
- Moreno, J.; Osorio, M. A Lyapunov approach to second-order sliding mode controllers and observers. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861.
- Solvar, S.; Le, V.; Ghanes, M.; Barbot, J.; Santomenna, G. Sensorless second order sliding mode observer for induction motor. In Proceedings of the 2010 IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010; pp. 1933–1938.
- M’Sirdi, N.; Rabhi, A.J.; Fridman, L.; Davila, J.; Delanne, Y. Second-order sliding-mode observer for estimation of vehicle dynamic parameters. Int. J. Veh. Des. 2008, 48, 190–207. [Google Scholar] [CrossRef]
- Han, J.; Wang, W. Nonlinear tracking-differentiator. J. Syst. Sci.d Math. Sci. 1994, 14, 177–183. (In Chinese) [Google Scholar]
- Emaru, T.; Tsuchiya, T. Research on estimating smoothed value and differential value by using sliding mode system. IEEE Trans. Robot. Autom. 2003, 19, 391–402. [Google Scholar] [CrossRef]
- Han, J.; Huang, Y. Frequency characteristic of second-order tracking-differentiator. Math. Pract. Theory 2003, 33, 71–74. (In Chinese) [Google Scholar]
- Emaru, T.; Tsuchiya, T. Research on signal tracking performance of nonlinear digital filter ESDS. Trans. Japan Soc. Mech. Eng. Ser. C 2004, 70, 2352–2359. (In Japanese) [Google Scholar] [CrossRef]
- Guo, B.; Zhao, Z. On convergence of tracking differentiator. International Journal of Control 2011, 84, 693–701. [Google Scholar] [CrossRef]
- Su, Y.; Duan, B.; Zheng, C. Nonlinear PID control of a six-DOF parallel manipulator. IEE Proc. Control Theory Appl. 2004, 151, 95–102. [Google Scholar] [CrossRef]
- Su, Y.; Sun, D.; Duan, B. Design of an enhanced nonlinear PID controller. Mechatronics 2005, 15, 1005–1024. [Google Scholar]
- Peng, X.; Cheng, S.; Wen, J. Application of nonlinear PID controller in superconducting magnetic energy storage. Int. J. Control Autom. Syst. 2005, 3, 296–301. [Google Scholar]
- Jin, S.; Kikuuwe, R.; Yamamoto, M. Real-time quadratic sliding mode filter for removing noise. Adv. Robot. 2012, 26, 877–896. [Google Scholar]
- Jin, S.; Kikuuwe, R.; Yamamoto, M. Parameter selection guidelines for a parabolic sliding mode filter based on frequency and time domain characteristics. J. Control Sci. Eng. 2012, 2012, 923679. [Google Scholar] [CrossRef]
- Jin, S.; Kikuuwe, R.; Yamamoto, M. Improved velocity feedback for position control by using a quadratic sliding mode filter. In Proceedings of 11th International Conference on Control, Automation and Systems, Gyeonggi-do, Korea, 26–29 October 2011; pp. 1207–1212.
- Janabi-Sharifi, F.; Hayward, V.; Chen, C. Discrete-time adaptive windowing for velocity estimation. IEEE Trans. Control Syst. Technol. 2000, 8, 1003–1009. [Google Scholar] [CrossRef]
- Acary, V.; Brogliato, B. Implicit euler numerical scheme and chattering-free implementation of sliding mode systems. Syst. Control Lett. 2010, 59, 284–293. [Google Scholar] [CrossRef]
- Kikuuwe, R.; Yasukouchi, S.; Fujimoto, H.; Yamamoto, M. Proxy-based sliding mode control: A safer extension of PID position control. IEEE Trans. Robot. 2010, 26, 860–873. [Google Scholar] [CrossRef]
- Acary, V.; Brogliato, B.; Orlov, Y. Chattering-free digital sliding-mode control with state observer and disturbance rejection. IEEE Trans. Autom. Control 2012, 57, 1087–1101. [Google Scholar] [CrossRef]





© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, S.; Jin, Y.; Wang, X.; Xiong, X. Discrete-Time Sliding Mode Filter with Adaptive Gain. Appl. Sci. 2016, 6, 400. https://doi.org/10.3390/app6120400
Jin S, Jin Y, Wang X, Xiong X. Discrete-Time Sliding Mode Filter with Adaptive Gain. Applied Sciences. 2016; 6(12):400. https://doi.org/10.3390/app6120400
Chicago/Turabian StyleJin, Shanhai, Yonggao Jin, Xiaodan Wang, and Xiaogang Xiong. 2016. "Discrete-Time Sliding Mode Filter with Adaptive Gain" Applied Sciences 6, no. 12: 400. https://doi.org/10.3390/app6120400