
Probability of Interference-Optimal and Energy-Efficient Analysis for Topology Control in Wireless Sensor Networks




Abstract
:
1. Introduction
- What is the probability that the network interference is reduced when adjusting the transmission range?
- What are the properties of this probability, such as how this probability varies when the network topology or the transmission range changes?
- If the network topology is fixed, which transmission range has the highest probability of interference-optimality?
- What is the relationship between the interference-optimal and the energy-efficient, i.e., the probability that the interference-optimality and energy-efficiency can be achieved at the same time?
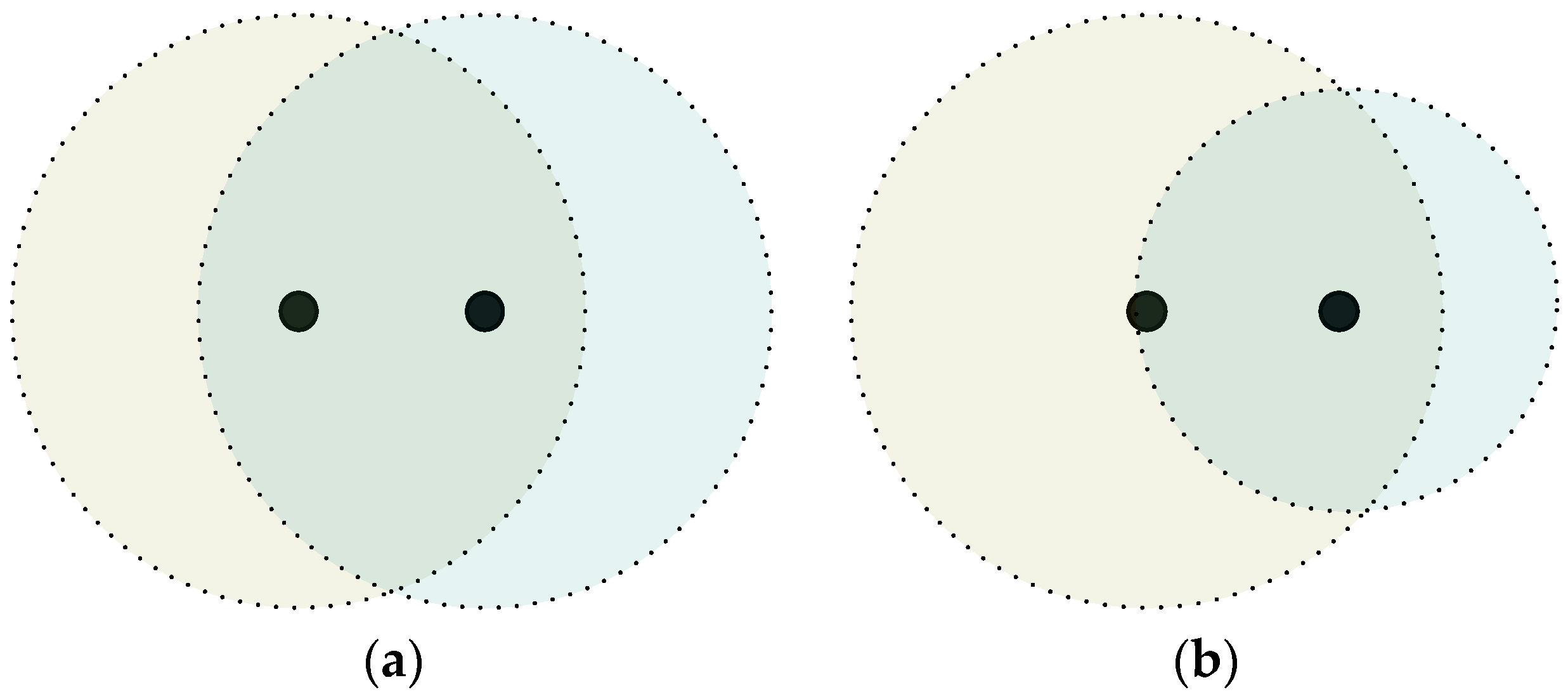
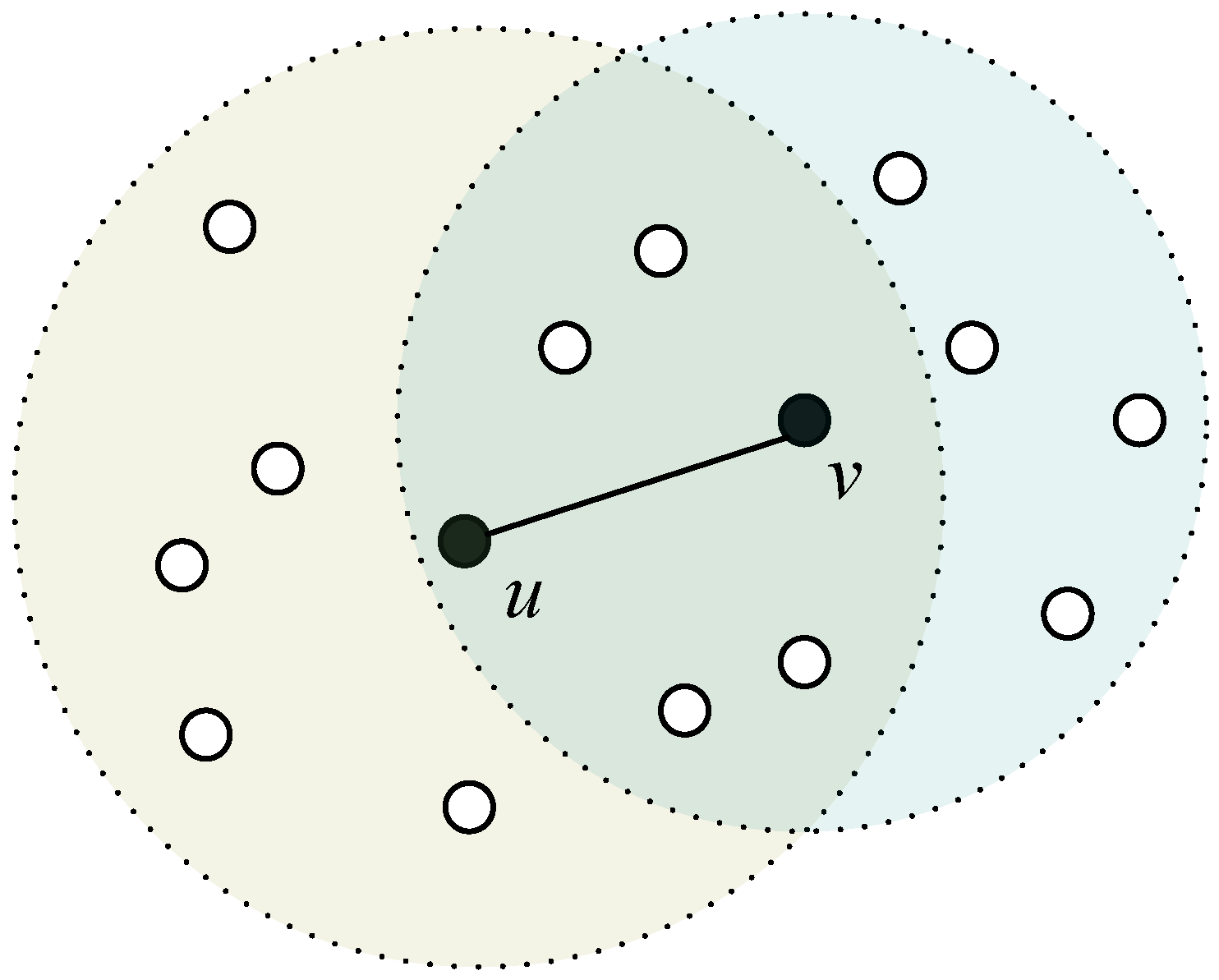
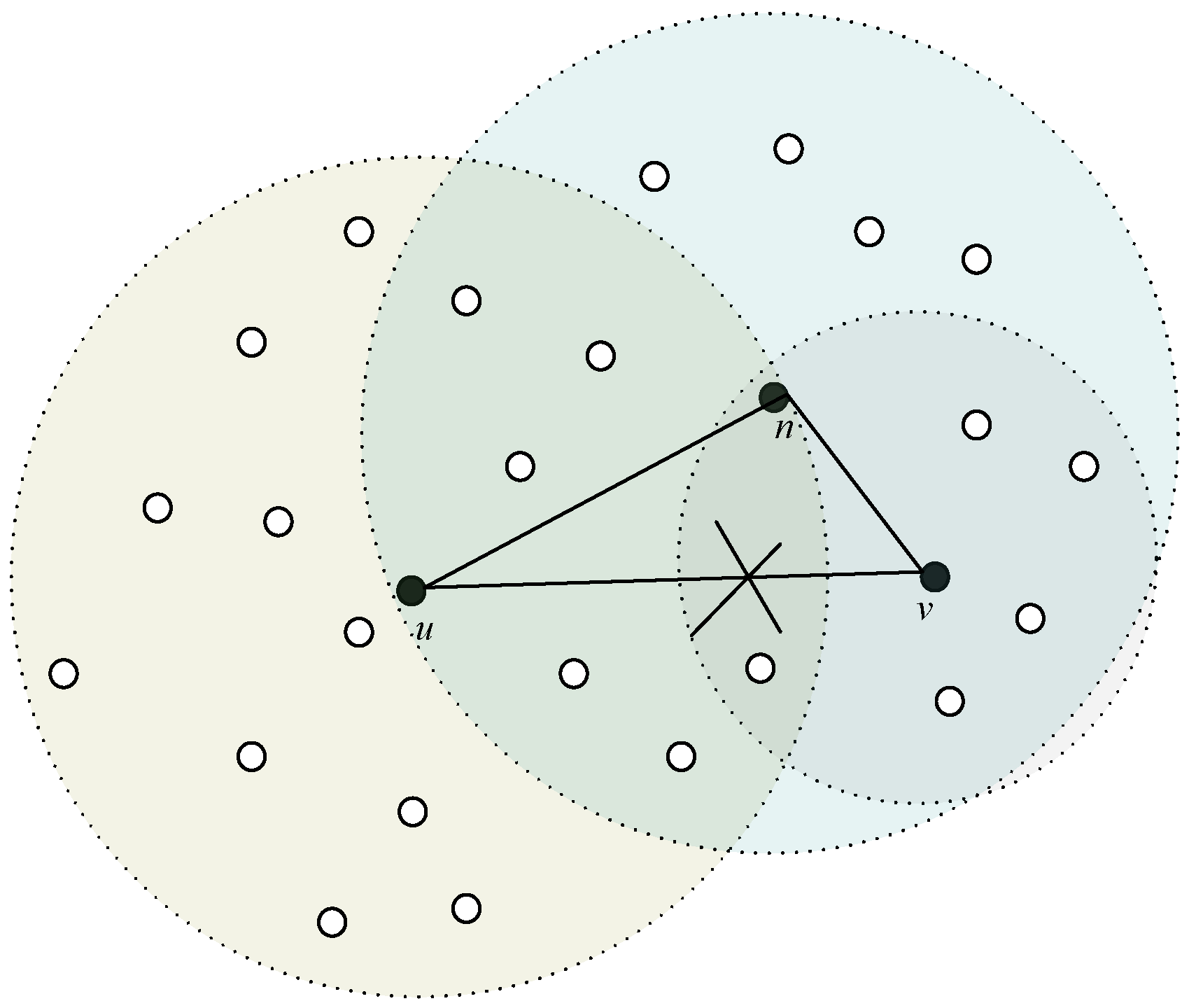
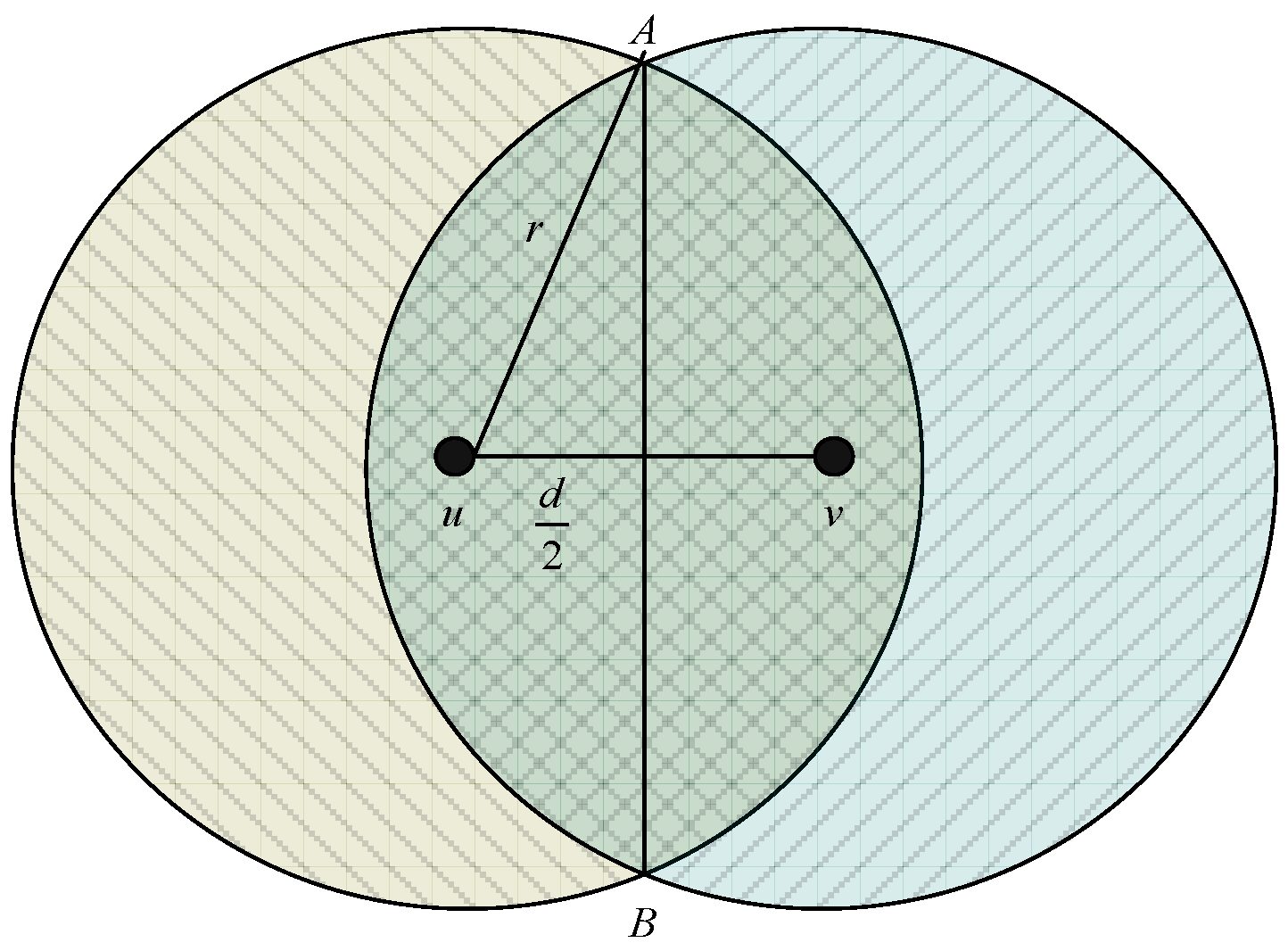
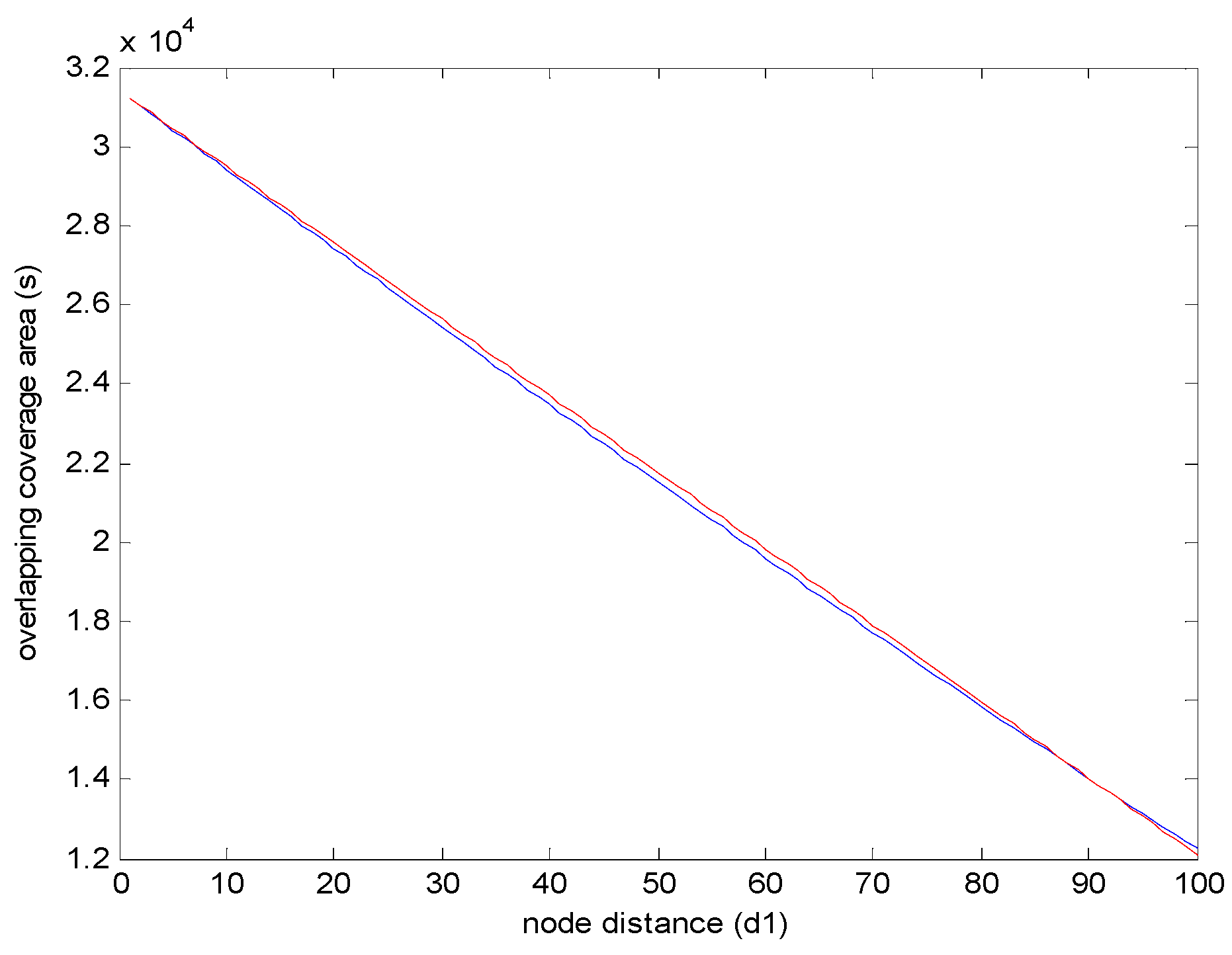
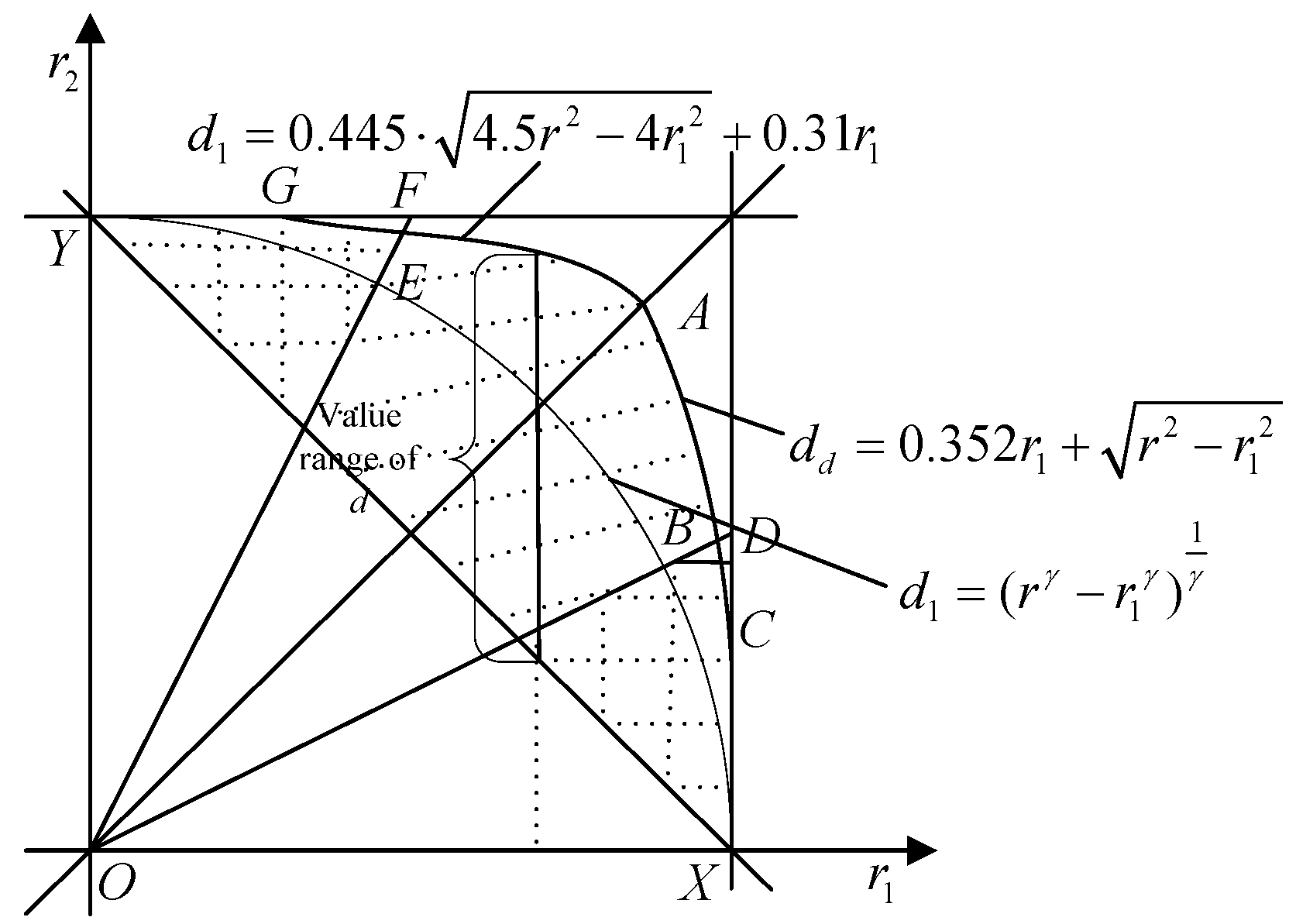
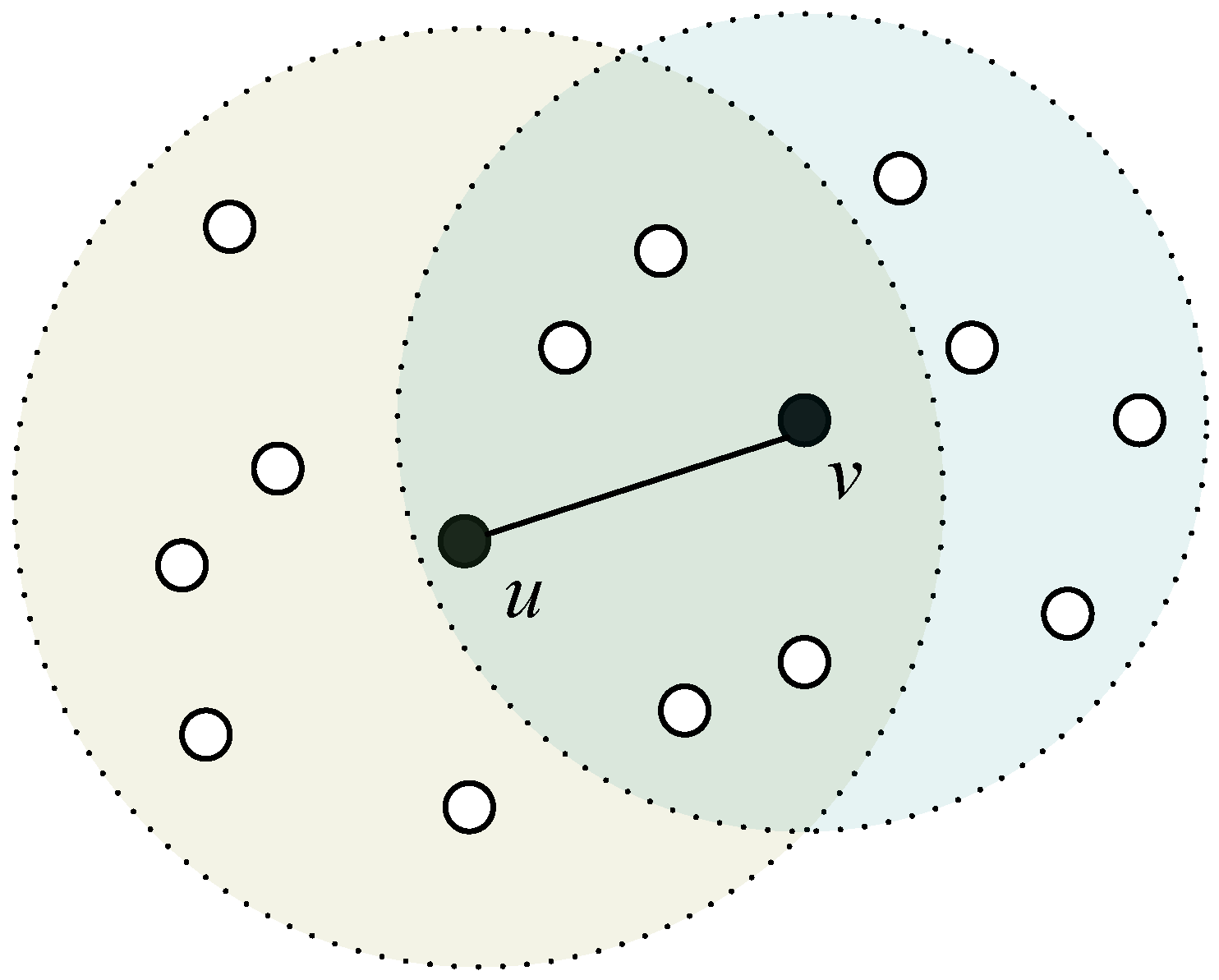
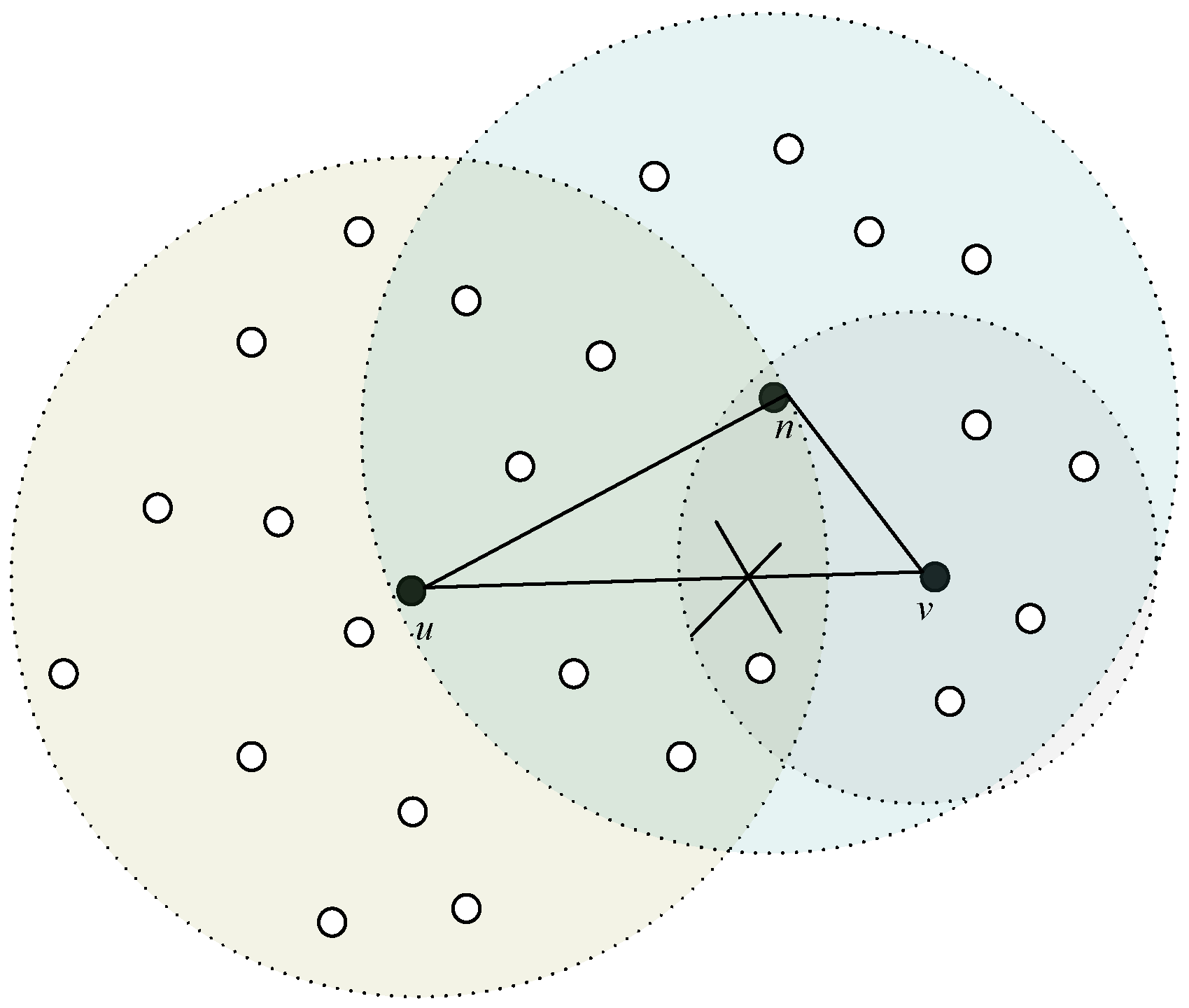
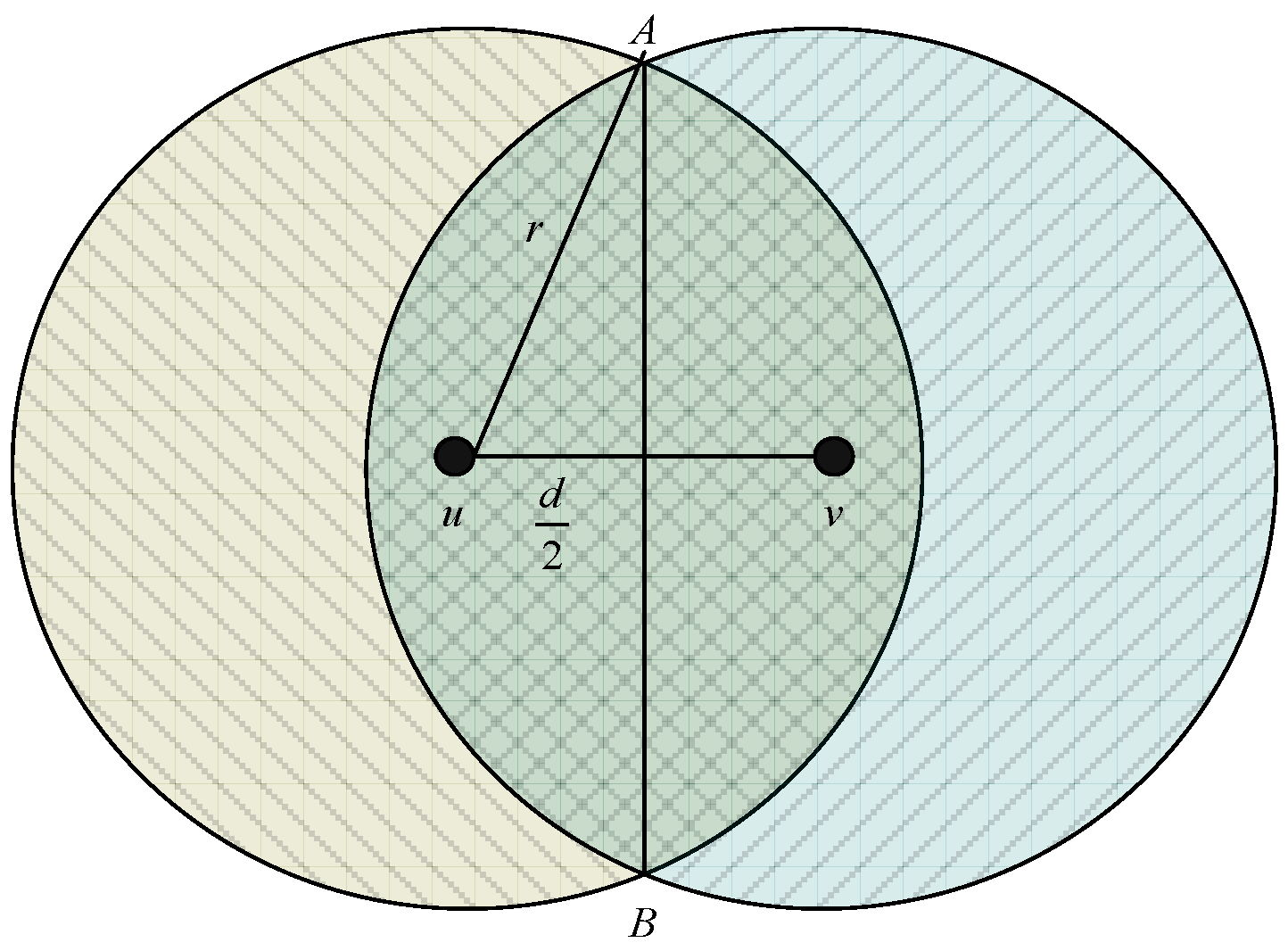
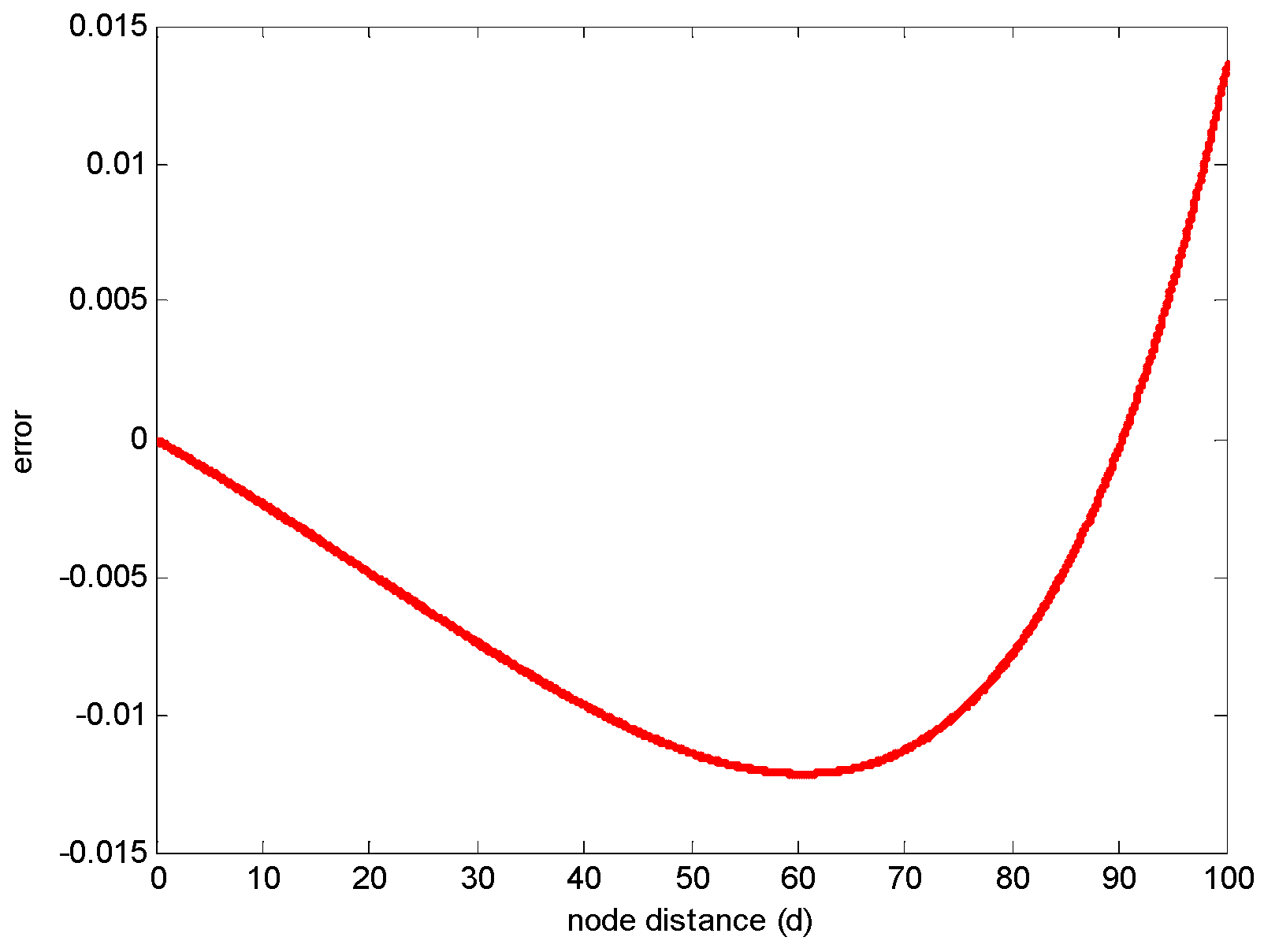
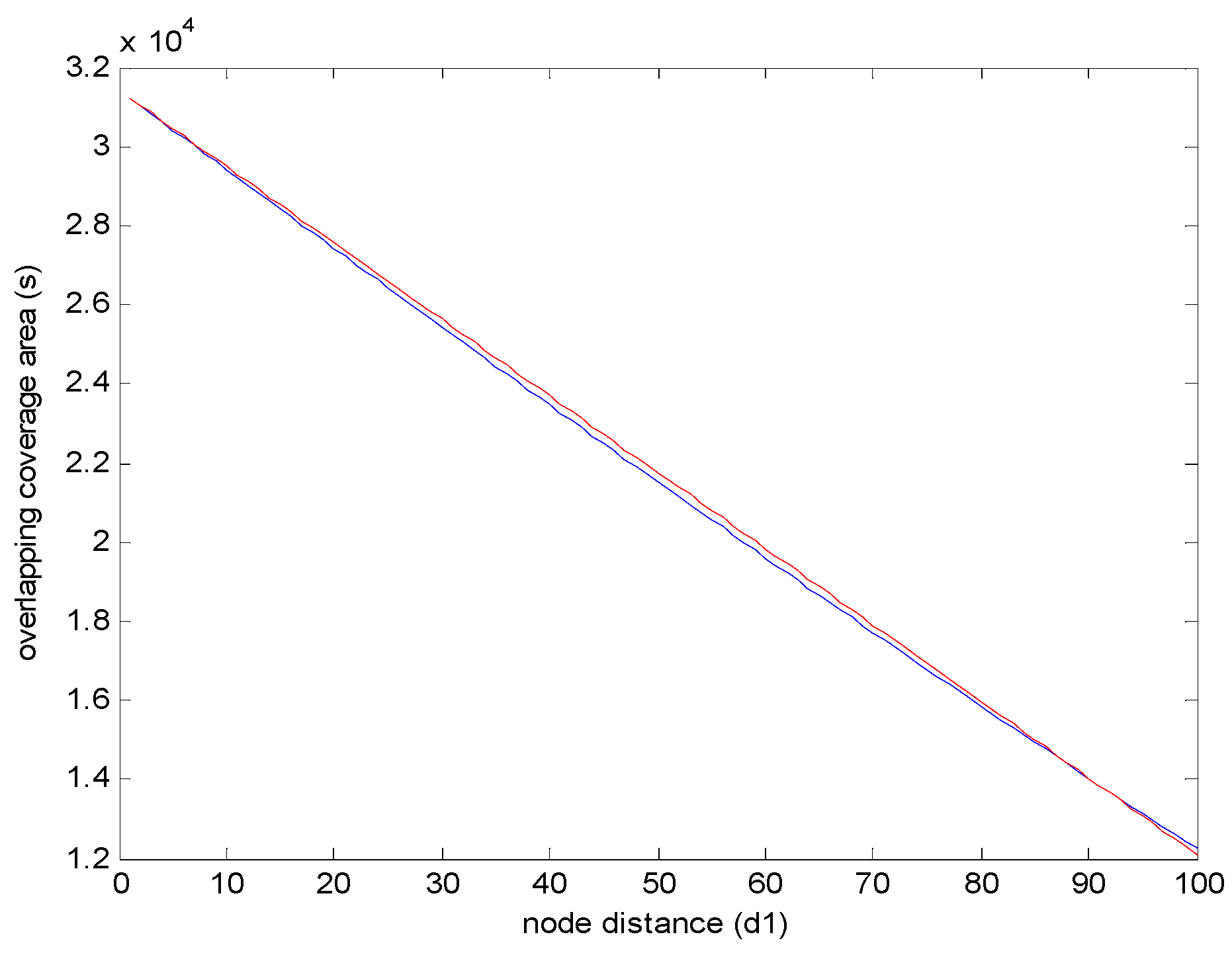
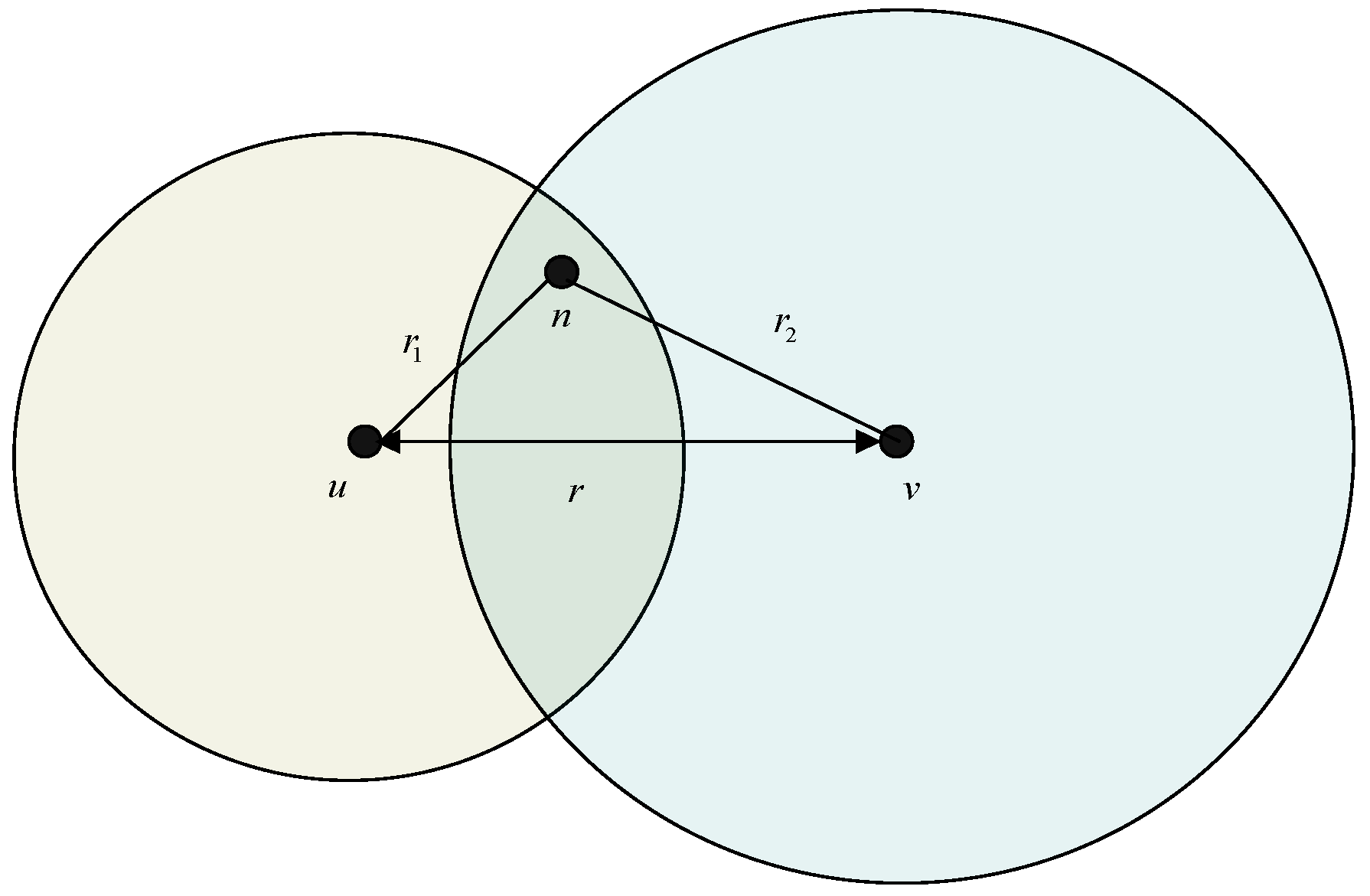
- We explore the relationship between the node distance and the overlapping coverage area of two nodes;
- We analyze the probability of interference-optimality when adjusting the transmission range;
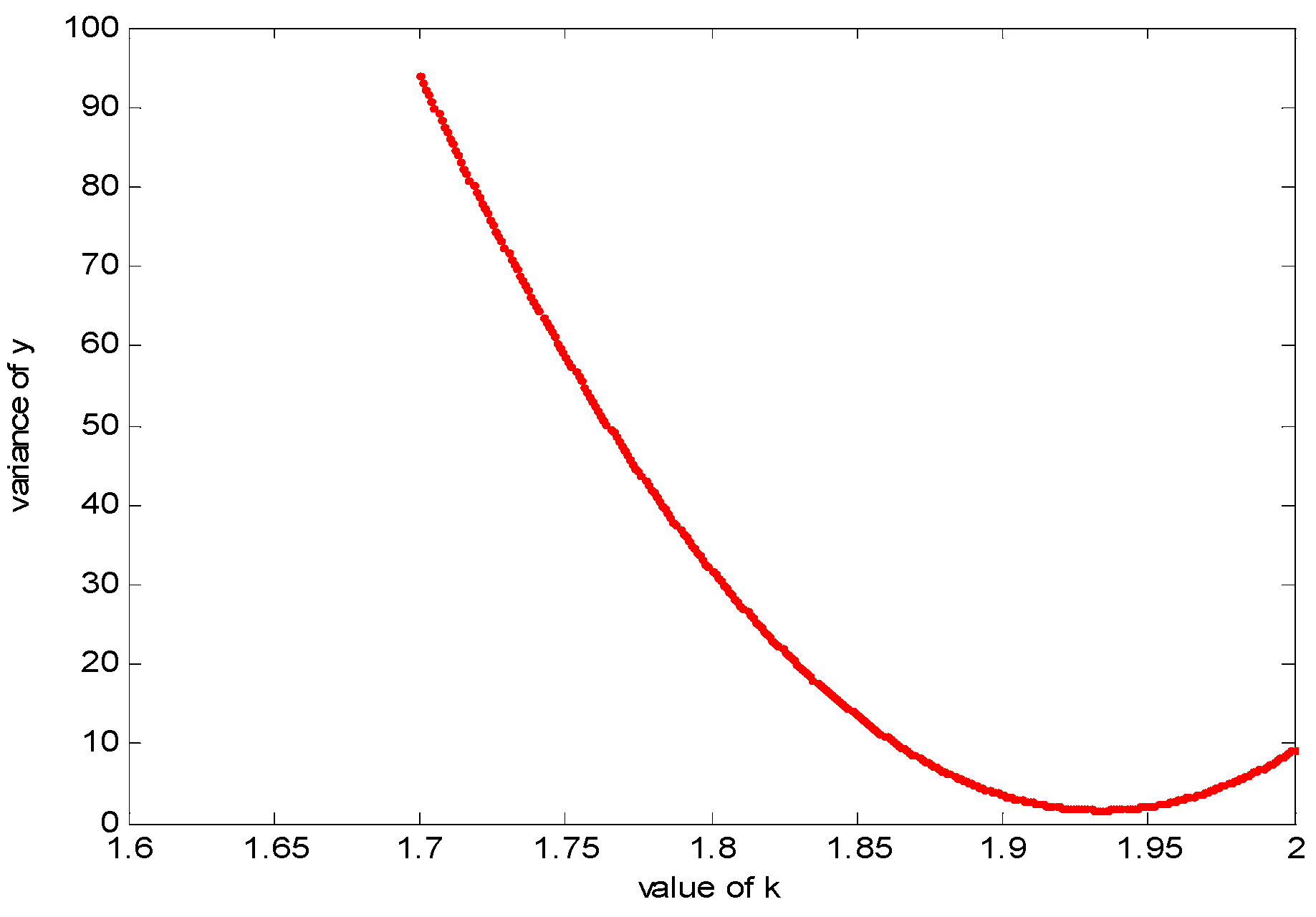
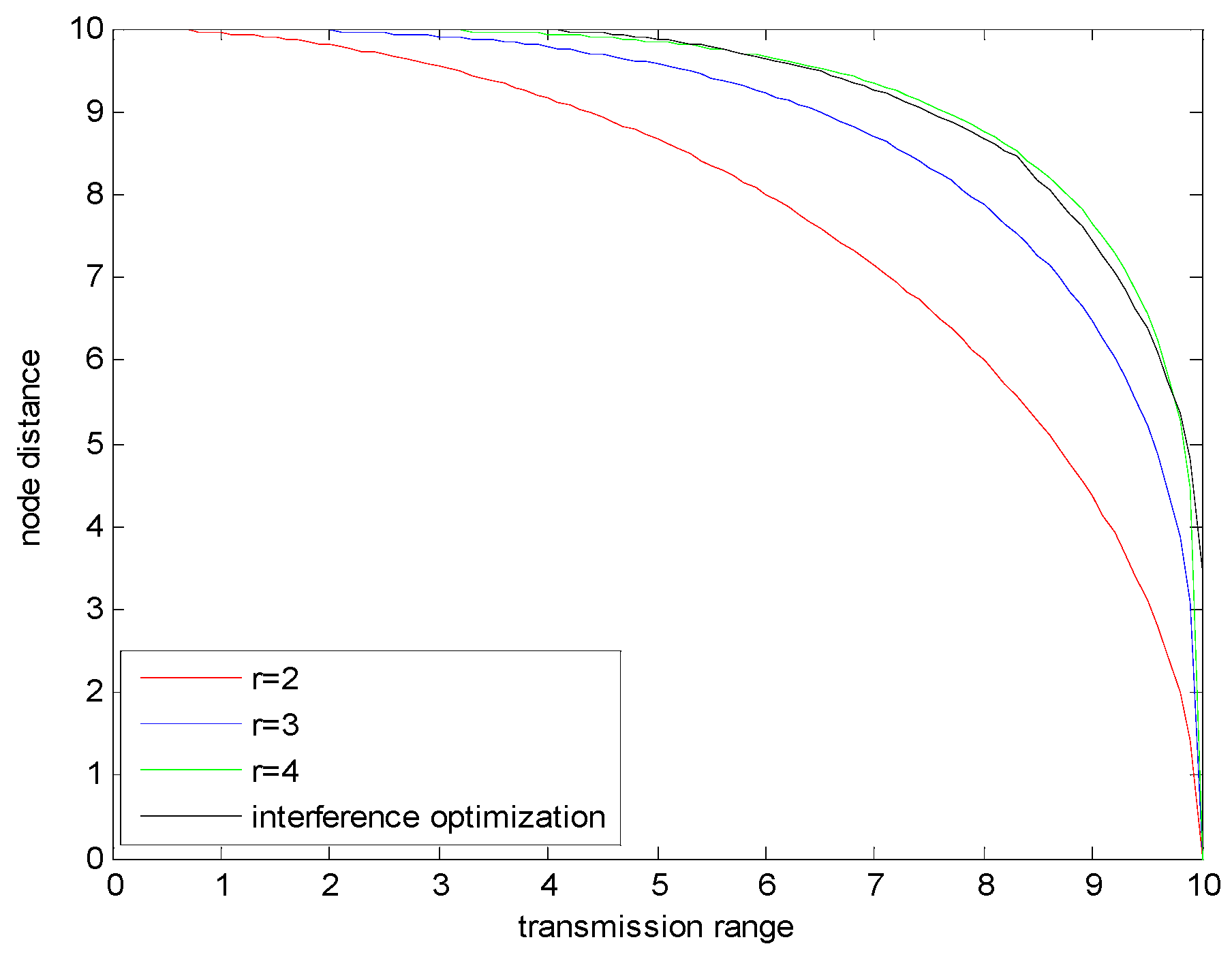
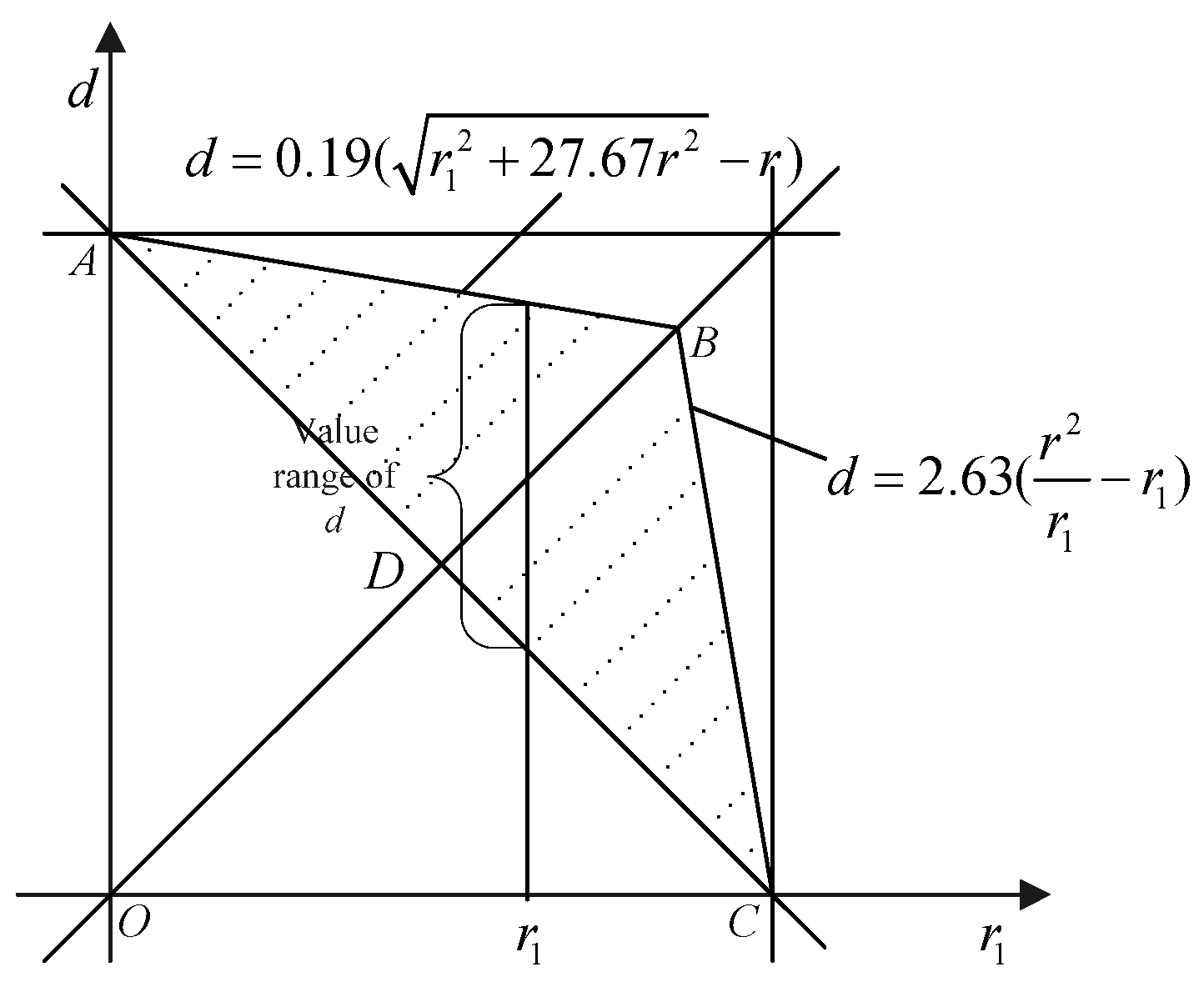
- We calculate the probability of interference-optimality under specific transmission range and find out the optimal transmission range which has maximum probability of interference-optimality;
- We investigate the relationship between energy-efficiency and interference-optimality.
2. Related Works
3. Network Model
4. Network Interference Probability Analysis
4.1. Homogenous Node Deployment Probability Analysis
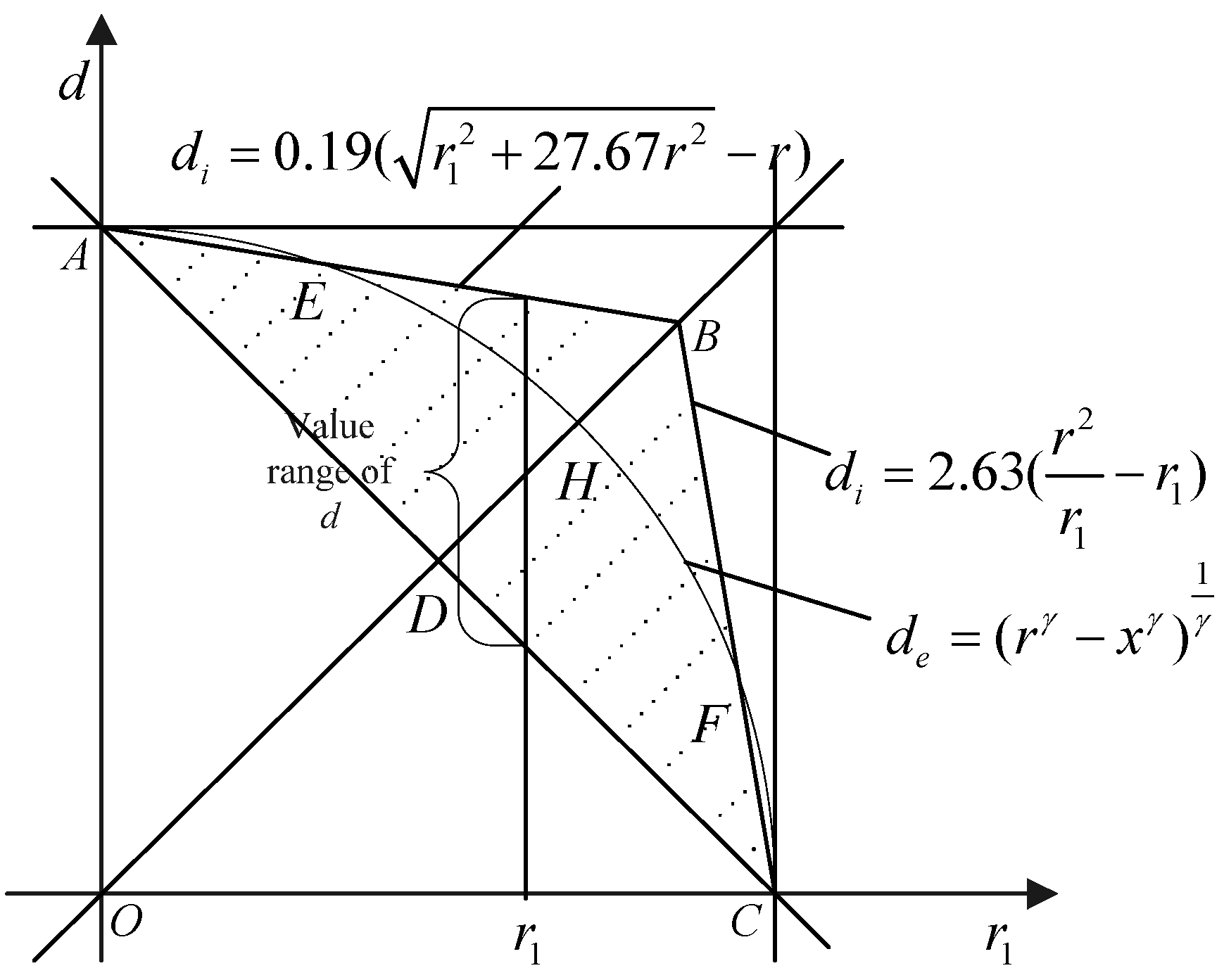
4.2. Heterogeneous Node Deployment Probability Analysis
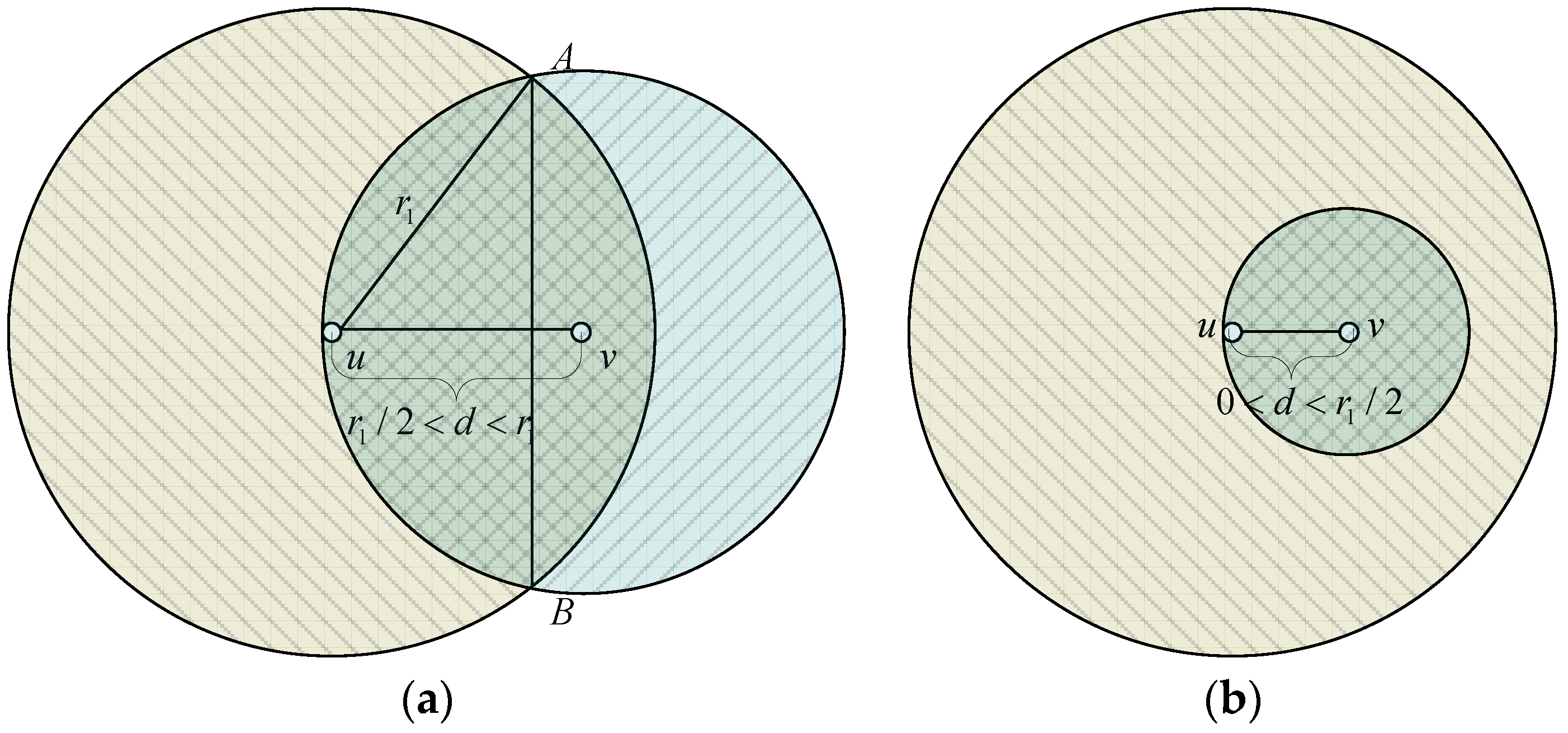
4.2.1. The Node Distance is
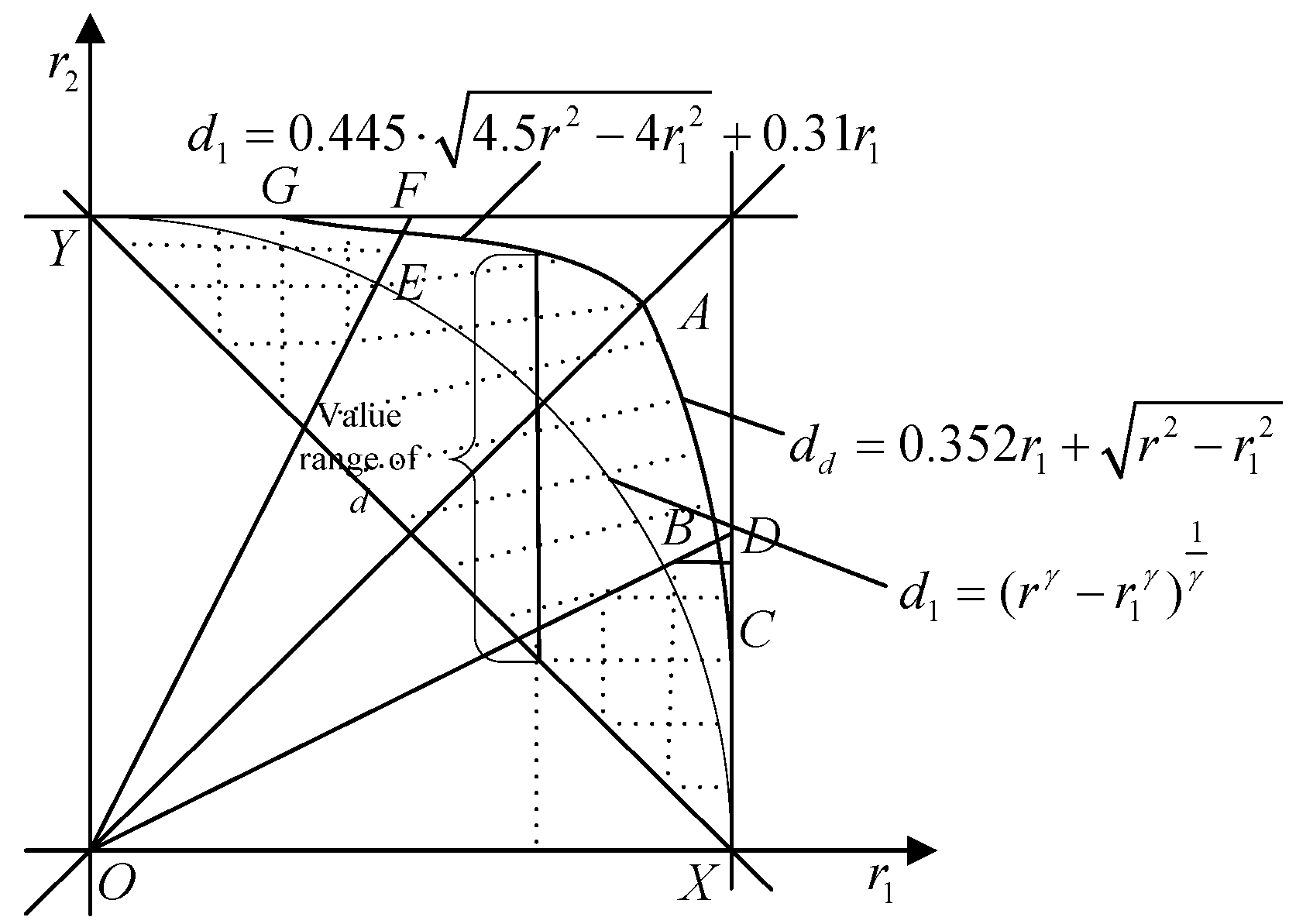
4.2.2. The Node Distance is
5. The Relationship between Energy-Efficiency and Interference-Optimality
5.1. Homogenous Node Deployment Mode
- (1)
- The minimum probability can be calculated when :
- (2)
- The maximum probability can be calculated when :
5.2. Heterogeneous Node Deployment Mode
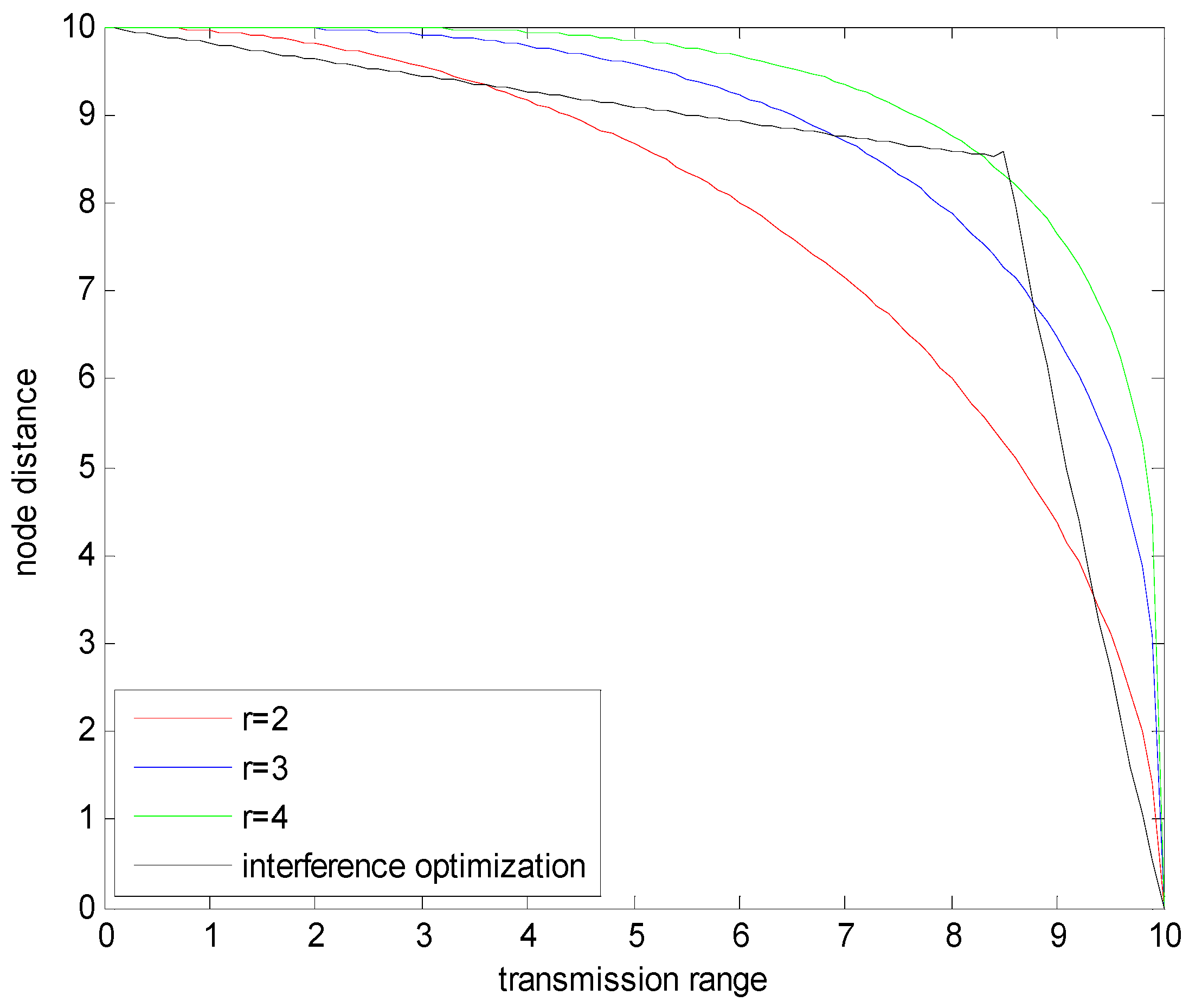
6. Simulation and Discussion
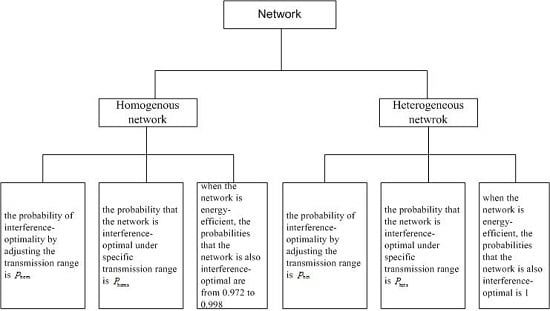
6.1. Probability Analysis in Homogenous Network
6.2. Probability Analysis in Heterogeneous Networks
6.3. The Relationship between Interference-Optimality and Energy Efficiency
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor networks survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networkss: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Rawat, P.; Singh, K.D.; Chaouchhi, H.; Bonnin, J.M. Wireless sensor networkss: A survey on recent development and potential synergies. J. Supercomput. 2013, 68, 1–48. [Google Scholar] [CrossRef]
- Huang, Y.; Martinez, J.F.; Sendra, J.; Lopez, L. Resilient wireless sensor networks using topology control: A review. Sensors 2015, 15, 24735–24770. [Google Scholar] [CrossRef] [PubMed]
- Burkhart, M.; von Rickenbach, P.; Wattenhofer, R.; Zollinger, A. Does topology control reduce interference? In Proceedings of the 5th ACM International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc’04), Tokyo, Japan, 24–26 May 2004; pp. 9–19.
- Von Rickenbach, P.; Wattenhofer, R.; Zollinger, A. Algorithm models of interference in wireless ad hoc and sensor networks. IEEE/ACM Trans. Netw. 2009, 17, 172–185. [Google Scholar] [CrossRef]
- Aziz, A.A.; Sekercioglu, Y.A.; Fitzpatrick, P.; Ivanovich, M. A Survey on distributed topology control techniques for extending the lifetime of battery power wireless sensor networks. IEEE Commun. Surv. Tutor. 2013, 15, 121–144. [Google Scholar] [CrossRef]
- Li, M.; Li, Z.; Vasilakos, A.V. A survey on topology control in wireless sensor networkss: Taxonomy, comparative study, and open issues. Proc. IEEE Brows. J. Mag. 2013, 101, 2538–2557. [Google Scholar] [CrossRef]
- Johansson, T.; Carr-Motyckova, L. Reducing interference in ad hoc networks through topology control. In Proceedings of the 2005 Joint Workshop on Foundations of Mobile Computing (DIALM-POMC’05), Cologne, Germany, 2 September 2005; pp. 17–23.
- Moaveni-Nejad, K.; Li, X. Low interference topology control for wireless ad hoc networks. Ad Hoc Sens. Wirel. Netw. 2005, 1, 41–64. [Google Scholar]
- Chiwewe, T.M.; Hancke, G.P. A distributed topology control technique for low interference and energy efficiency in wireless sensor networks. IEEE Trans. Ind. Inform. 2012, 8, 11–19. [Google Scholar] [CrossRef]
- Zhang, X.M.; Zhang, Y.; Yan, F.; Vasilakos, A.V. Interference Based topology control algorithm for delay constrained mobile ad hoc networks. IEEE Trans. Mob. Comput. 2015, 14, 742–754. [Google Scholar] [CrossRef]
- Sun, G.; Zhao, L.; Chen, Z.; Qiao, G. Effective link interference model in topology control of wireless ad hoc and sensor network. J. Netw. Comput. Appl. 2015, 52, 69–78. [Google Scholar] [CrossRef]
- Von Rickenbach, P.; Wattenhofer, R.; Zollinger, A. A robust interference model for wireless ad hoc networks. In Proceedings of the 19th IEEE International Parallel and Distributed Processing Symposium (IPDP’05), Denver, CO, USA, 4–8 April 2005; pp. 1–8.
- Lou, T.; Tan, H.; Wang, Y.; Lau, F.C.M. Minimizing average interference through topology control. In Proceedings of the 7th International Symposium on Algorithms for Sensor Systems, Wireless Ad Hoc Networks and Autonomous Mobile Entities (ALGOSENSORS 2011), Saarbrucken, Germany, 8–9 September 2011; pp. 115–129.
- Huang, J.; Liu, S.; Xing, G.; Zhang, H.; Wang, J.; Huang, L. Accuracy-aware interference modeling and measurement in wireless sensor networks. In Proceedings of the 31th International Conference on Distributed Computing Systems, Minneapolos, MN, USA, 20–24 June 2011; pp. 172–181.
- De Heide, F.M.A.; Schindelhauer, C.; Volbert, K.; Grunewald, M. Energy, congestion and dilation in ratio networks. In Proceedings of the Fourteenth Annual ACM Symposium on Parallel Algorithms and Architectures (SPAA’02), Winnipeg, MB, Canada, 11–13 August 2002; pp. 230–237.
- Halldorsson, M.M.; Tokuyama, T. Minimizing interference of a wireless ad hoc network in a plane. Theor. Comput. Sci. 2008, 402, 29–42. [Google Scholar] [CrossRef]
- Cardieri, P. Modeling Interference in Wireless Ad Hoc Network. IEEE Commun. Surv. Tutor. 2007, 12, 551–572. [Google Scholar] [CrossRef]
- Blough, D.M.; Leoncini, M.; Resta, G.; Santi, P. Topology control with better radio models: Implications for energy and multi-hop interference. Perform. Eval. 2007, 64, 379–398. [Google Scholar] [CrossRef]
- Liu, S.; Xing, G.; Zhang, H.; Wang, J. Passive interference measurement in wireless sensor networks. In Proceedings of the 18th IEEE International Conference on Network Protocols (ICNP), Kyoto, Japan, 5–8 October 2010; pp. 52–61.
- Hermans, F.; Rensferl, O.; Voigt, T.; Ngai, E.; Norden, L.; Gunningverg, P. Sonic: Classifying interference in 802.15.4 sensor networks. In Proceedings of the 12th International Conference on Information Processing in Sensor Networks (IPSN’13), Philadelphia, PA, USA, 8–11 April 2013; pp. 55–66.
- Cong, Y.; Zhou, X.; Kennedy, R.A. Interference Prediction in Mobile Ad Hoc Networks with a General Mobility Model. IEEE Trans. Wirel. Commun. 2015, 14, 4277–4290. [Google Scholar] [CrossRef]
- Huang, Y.; Martinez, J.F.; Sendra, J.; Lopez, L. The influence of communication range on connectivity for resilient wireless sensor networks using a probabilistic approach. Int. J. Distrib. Sens. Netw. 2013. [Google Scholar] [CrossRef]
- Bettstetter, C. On the minimum node degree and connectivity of a wireless multihop network. In Proceedings of the 3rd ACM International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc’02), Lausanne, Switzerland, 9–11 June 2002; pp. 80–91.
- Mekikis, V.; Antonopoulos, A.; Kartsakli, E.; Lalos, A.; Alonso, L.; Verikoukis, C. Information Exchange in Randomly Deployed Dense WSNs with Wireless Energy Harvesting Capabilities. IEEE Trans. Wirel. Commun. 2016, 15, 3008–3018. [Google Scholar] [CrossRef]
- Cressie, N.A.C. Statistics for Spatial Data; Wiley-Interscience Publication: New York, NY, USA, 1990; pp. 577–725. [Google Scholar]
- Zhu, Y.; Huang, M.; Chen, S.; Wang, Y. Energy-efficient topology control in cooperative ad hoc network. IEEE Trans. Parallel Distrib. Syst. 2012, 23, 1480–1491. [Google Scholar] [CrossRef]
- Rappaport, T.S. Wireless Communication: Principles and Practive; Prentice-Hall: Englewood Cliffs, NJ, USA, 1996; pp. 69–122, 139–196. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Meaning of the Parameters |
|---|---|
| r | the original transmission range of node |
| r1 | the transmission range of node |
| d | the distance between node u and node v |
| d1 | the distance between node u and node |
| s | the coverage area of nodes |
| p | the probability of interference-optimality under different original transmission range r |
| ps | the probability of interference-optimality under different transmission range r1 |
| the energy needed before reducing the transmission range | |
| the energy needed after reducing the transmission range | |
| the interference of edge (u, v) |
| Points | A | B | C | D | E | F | G |
|---|---|---|---|---|---|---|---|
| Coordinate | (0.84r, 0.84r) | (0.99r, 0.495r) | (r, 0.343r) | (r, 0.5r) | (0.495r, 0.99r) | (0.5r, r) | (0.343r, r) |
| Coordinates | F | E | H |
|---|---|---|---|
| (0.94r, 0.36r) | (0.36r, 0.94r) | (0.71r, 0.71r) | |
| (0.88r, 0.68r) | (0.68r, 0.88r) | (0.79r, 0.79r) | |
| (0.86r, 0.83r) | (0.83r, 0.86r) | (0.84r, 0.84r) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Martínez-Ortega, J.-F.; Diaz, V.H.; Meneses Chaus, J.M. Probability of Interference-Optimal and Energy-Efficient Analysis for Topology Control in Wireless Sensor Networks. Appl. Sci. 2016, 6, 396. https://doi.org/10.3390/app6120396
Li N, Martínez-Ortega J-F, Diaz VH, Meneses Chaus JM. Probability of Interference-Optimal and Energy-Efficient Analysis for Topology Control in Wireless Sensor Networks. Applied Sciences. 2016; 6(12):396. https://doi.org/10.3390/app6120396
Chicago/Turabian StyleLi, Ning, José-Fernán Martínez-Ortega, Vicente Hernández Diaz, and Juan Manuel Meneses Chaus. 2016. "Probability of Interference-Optimal and Energy-Efficient Analysis for Topology Control in Wireless Sensor Networks" Applied Sciences 6, no. 12: 396. https://doi.org/10.3390/app6120396
APA StyleLi, N., Martínez-Ortega, J.-F., Diaz, V. H., & Meneses Chaus, J. M. (2016). Probability of Interference-Optimal and Energy-Efficient Analysis for Topology Control in Wireless Sensor Networks. Applied Sciences, 6(12), 396. https://doi.org/10.3390/app6120396