A Novel MPPT Control Method of Thermoelectric Power Generation with Single Sensor

 ,
,
Abstract
:1. Introduction
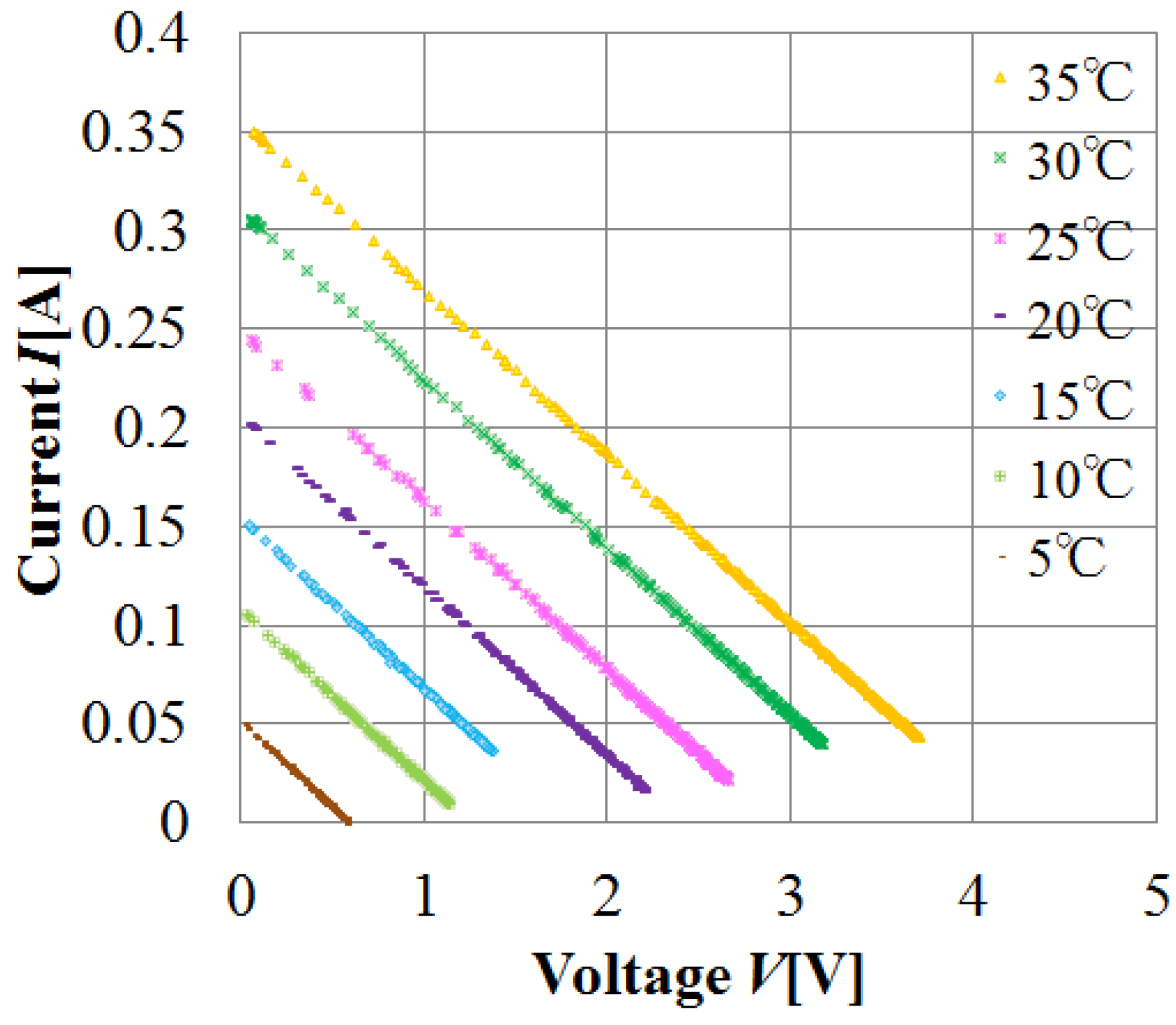
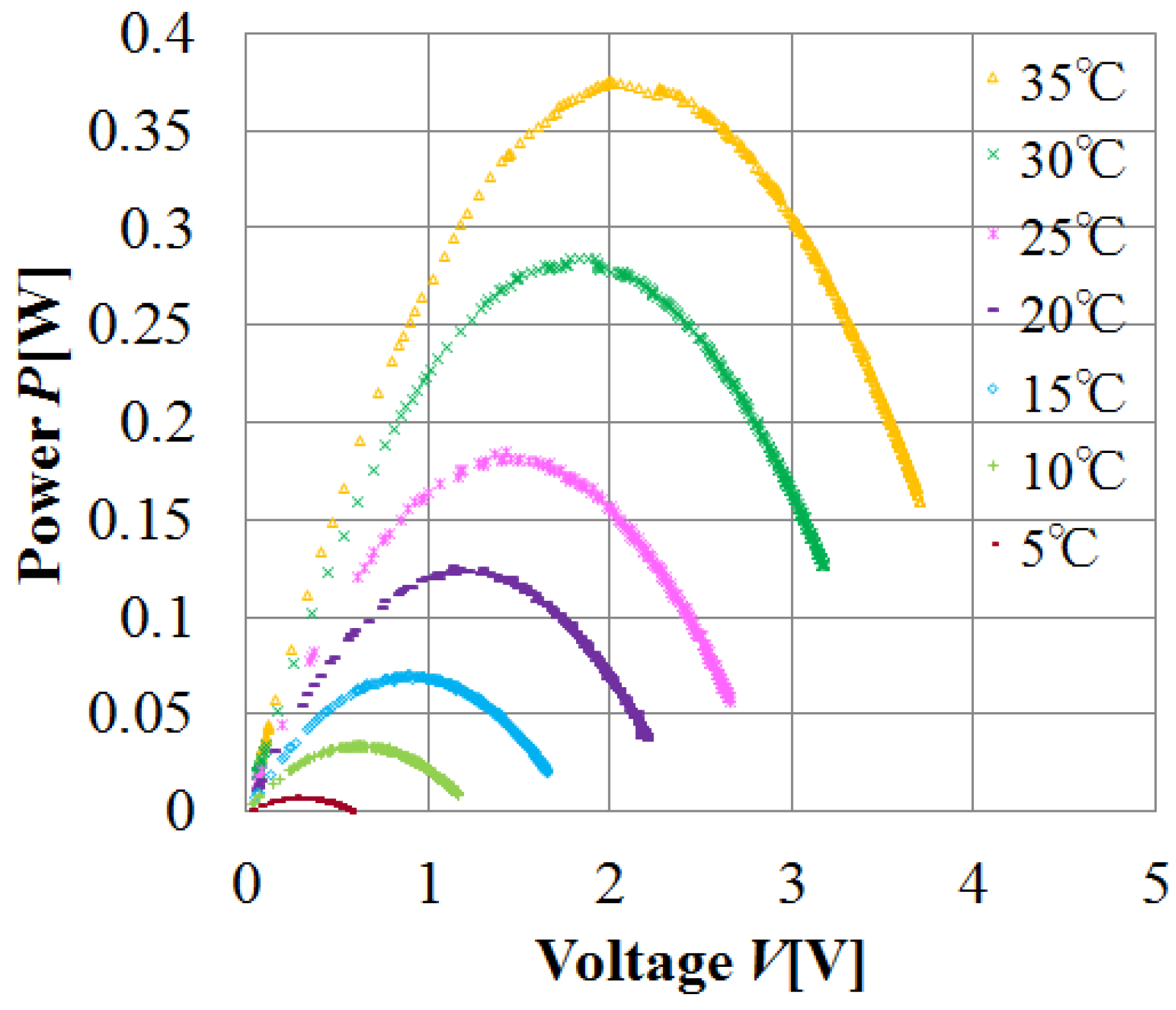
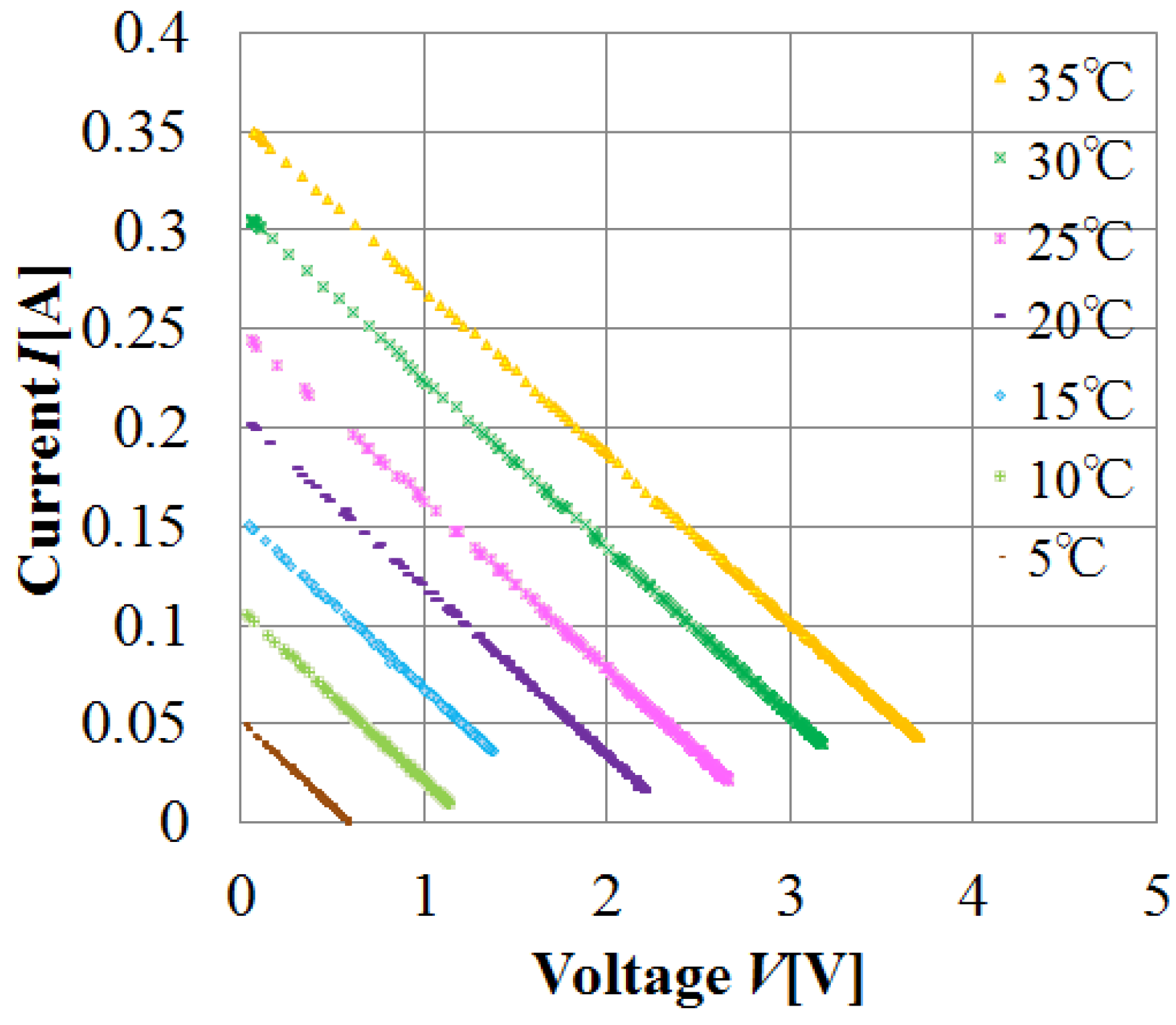
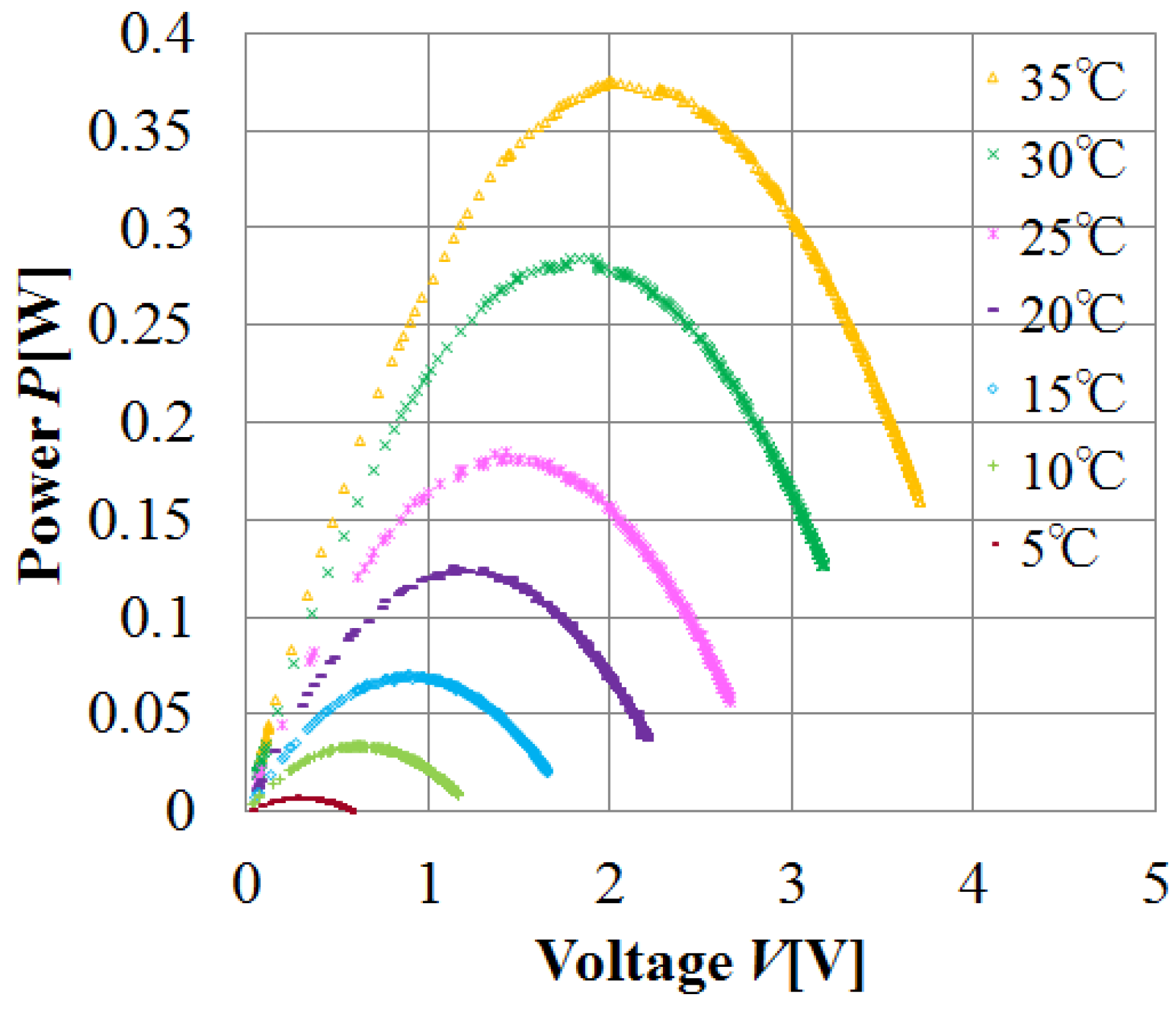
2. Characteristic of the Thermoelectric Power Module




3. Proposed MPPT Control Method

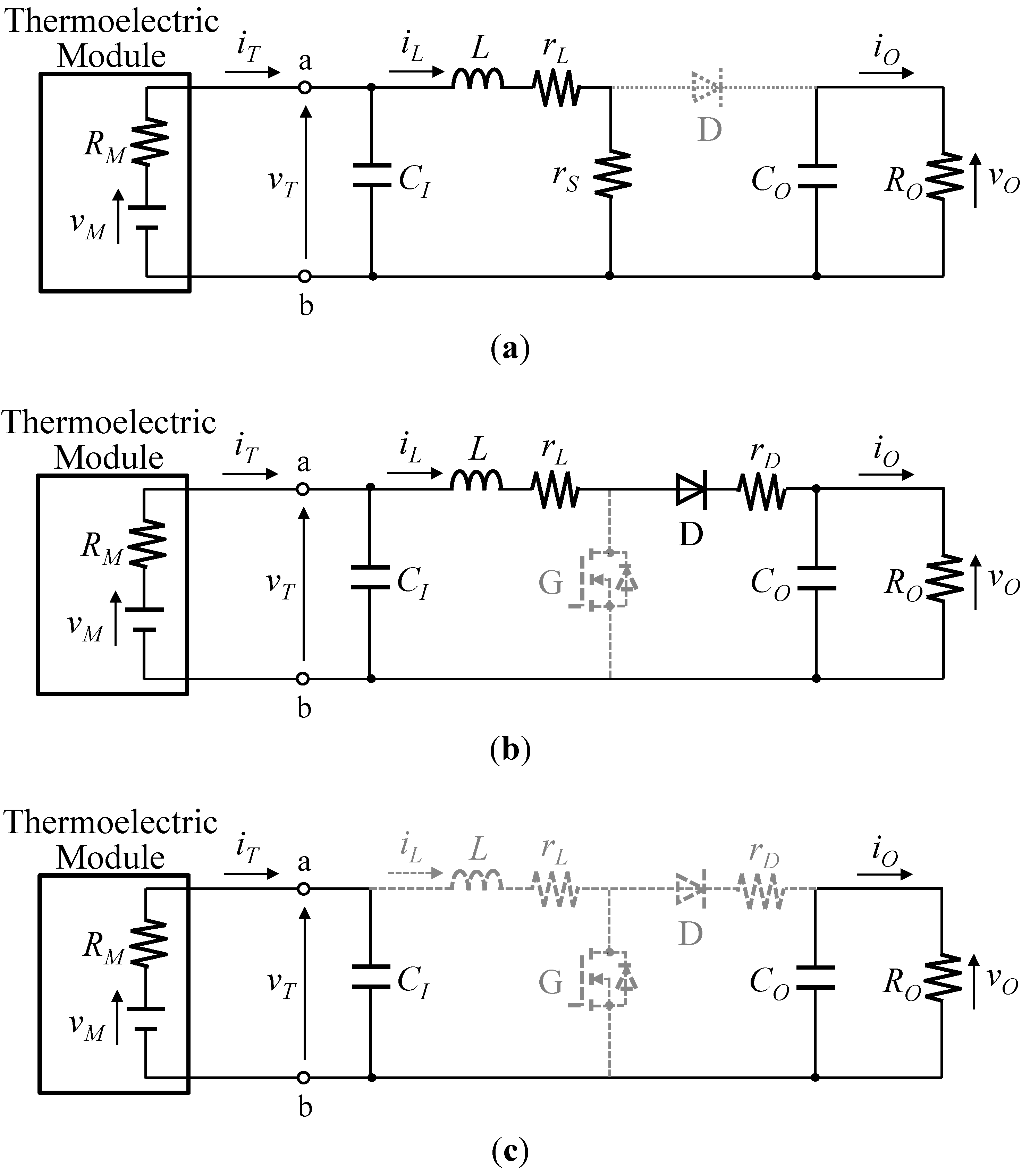
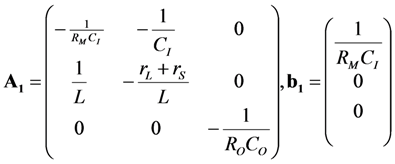
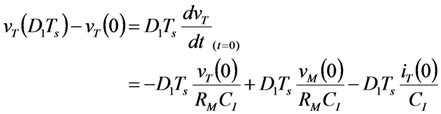
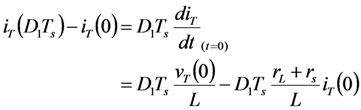
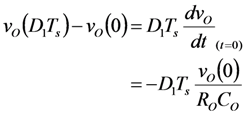
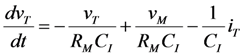
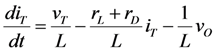
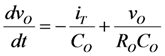
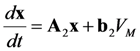
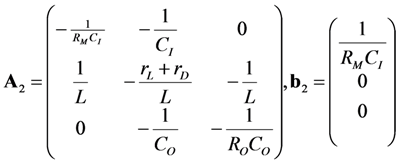
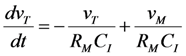
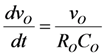
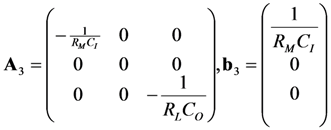
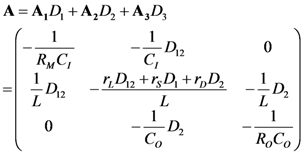
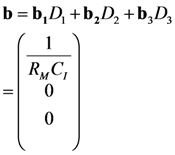
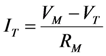
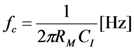
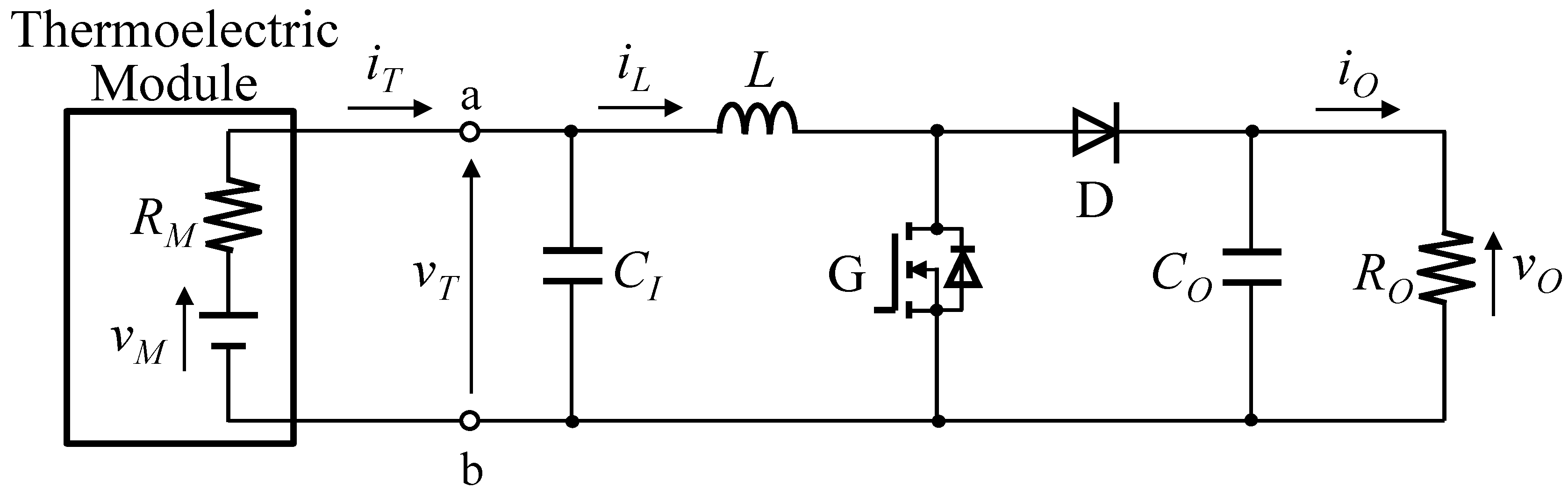
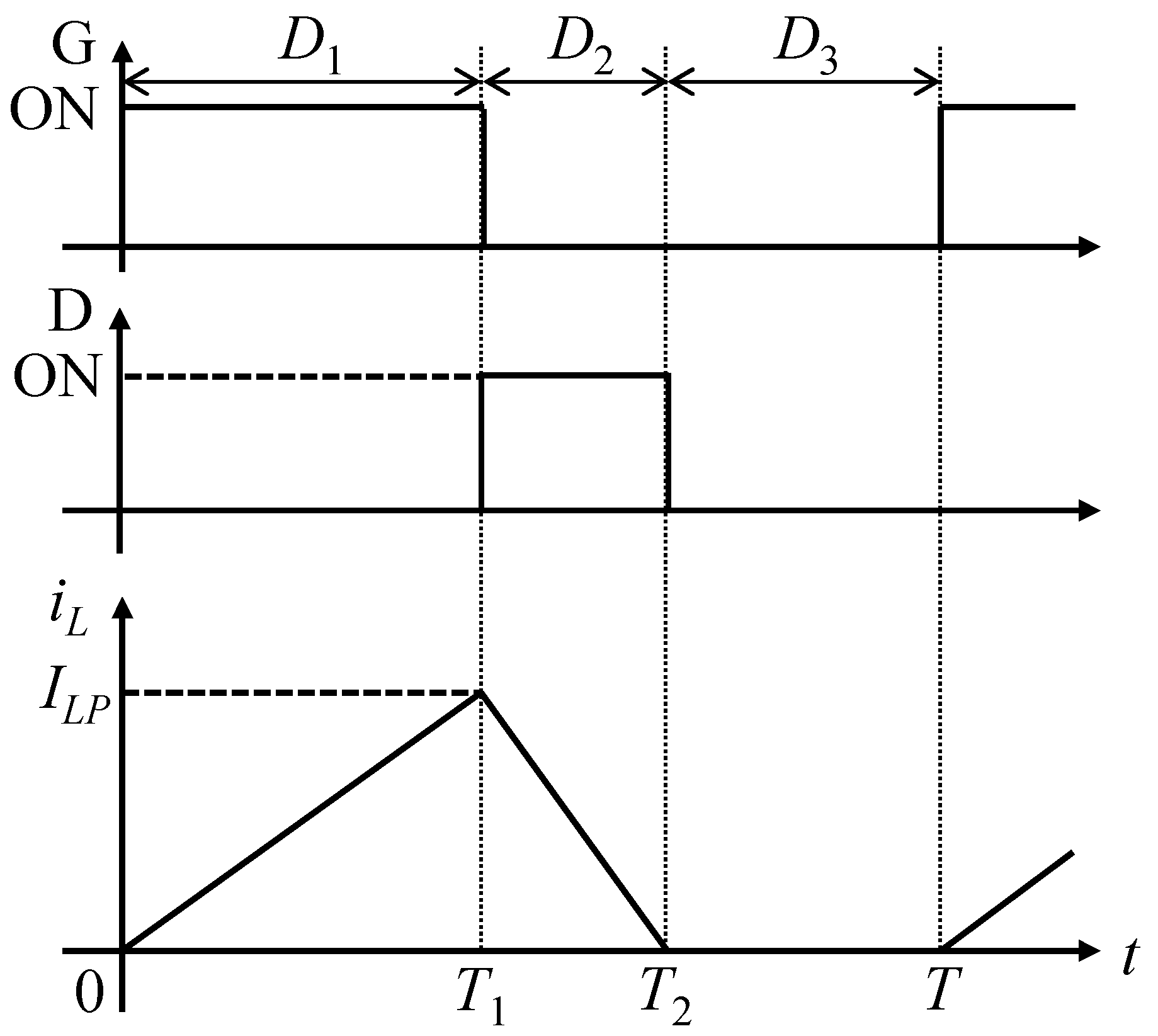
3.1. Analyzing the Thermoelectric Power Generation System


















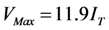
3.2. Proposed MPPT Control Method


4. Simulation Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Input capacitor | CI | 100 μF |
| Inductor | L | 150 μH |
| Output capacitor | CO | 1000 μF |
| Load resistor | R | 1 kΩ |
| Winding resistor of the inductor L | rL | 0.26 Ω |
| Conduction resistance of the diode D | rD | 0.1 Ω |
| ON-resistance of the MOSFET | rS | 8.5 mΩ |


5. Conclusions
References
- Singh, B.; Tan, L.; Date, A.; Akbarzadeh, A. Power Generation from Salinity Gradient Solar Pond Using Thermoelectric Generators for Renewable Energy Application. In Proceeding of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 89–92.
- Ishiyama, T.; Takahashi, T.; Yamada, H. Energy Harvesting Technology for Self-contained Wireless Telemetry Using Thermoelectric Generators. In Proceeding of the 16th International Conference on Electrical Engineering, Busan, Korea, 11–14 July 2010.
- Ishiyama, T.; Yamada, H. Effect of Heat Pipes to Suppress Heat Leakage for Thermoelectric Generator of Energy Harvesting. In Proceeding of the 2012 International Conference on Renewable Energy Research and Applications (ICRERA), Nagasaki, Japan, 11–14 November 2012; pp. 1–4.
- He, H.; Nagayoshi, H.; Kajikawa, T. A Method of Maximum Power Point Tracking of Thermoelectric Power Generation. In Proceeding of the IEEJ Power and Energy National Conference, Tokyo, Japan, 6–8 August 2003; pp. 465–466.
- Yamada, H.; Hanamoto, T.; Ishiyama, T.; Sakaguchi, T.; Takahashi, T. A novel MPPT control method for thermoelectric generation by temperature detection. J. Jpn Inst. Power Electron. 2011, 36, 151–157. [Google Scholar] [CrossRef]
- Noguchi, T.; Matsumoto, H. Maximum-Power-Point Tracking Method of Photovoltaic Power System. IEEJ Trans. IA. 2005, 125, 54–59. [Google Scholar] [CrossRef]
- Harada, K.; Ninomiya, T.; Gu, B. The fundamentals of switched-mode converters. Corona Publ. 1992, 65–71. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Yamada, H.; Kimura, K.; Hanamoto, T.; Ishiyama, T.; Sakaguchi, T.; Takahashi, T. A Novel MPPT Control Method of Thermoelectric Power Generation with Single Sensor. Appl. Sci. 2013, 3, 545-558. https://doi.org/10.3390/app3020545
Yamada H, Kimura K, Hanamoto T, Ishiyama T, Sakaguchi T, Takahashi T. A Novel MPPT Control Method of Thermoelectric Power Generation with Single Sensor. Applied Sciences. 2013; 3(2):545-558. https://doi.org/10.3390/app3020545
Chicago/Turabian StyleYamada, Hiroaki, Koji Kimura, Tsuyoshi Hanamoto, Toshihiko Ishiyama, Tadashi Sakaguchi, and Tsuyoshi Takahashi. 2013. "A Novel MPPT Control Method of Thermoelectric Power Generation with Single Sensor" Applied Sciences 3, no. 2: 545-558. https://doi.org/10.3390/app3020545