
Evaluation of Bone Consolidation in External Fixation with an Electromechanical System






Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
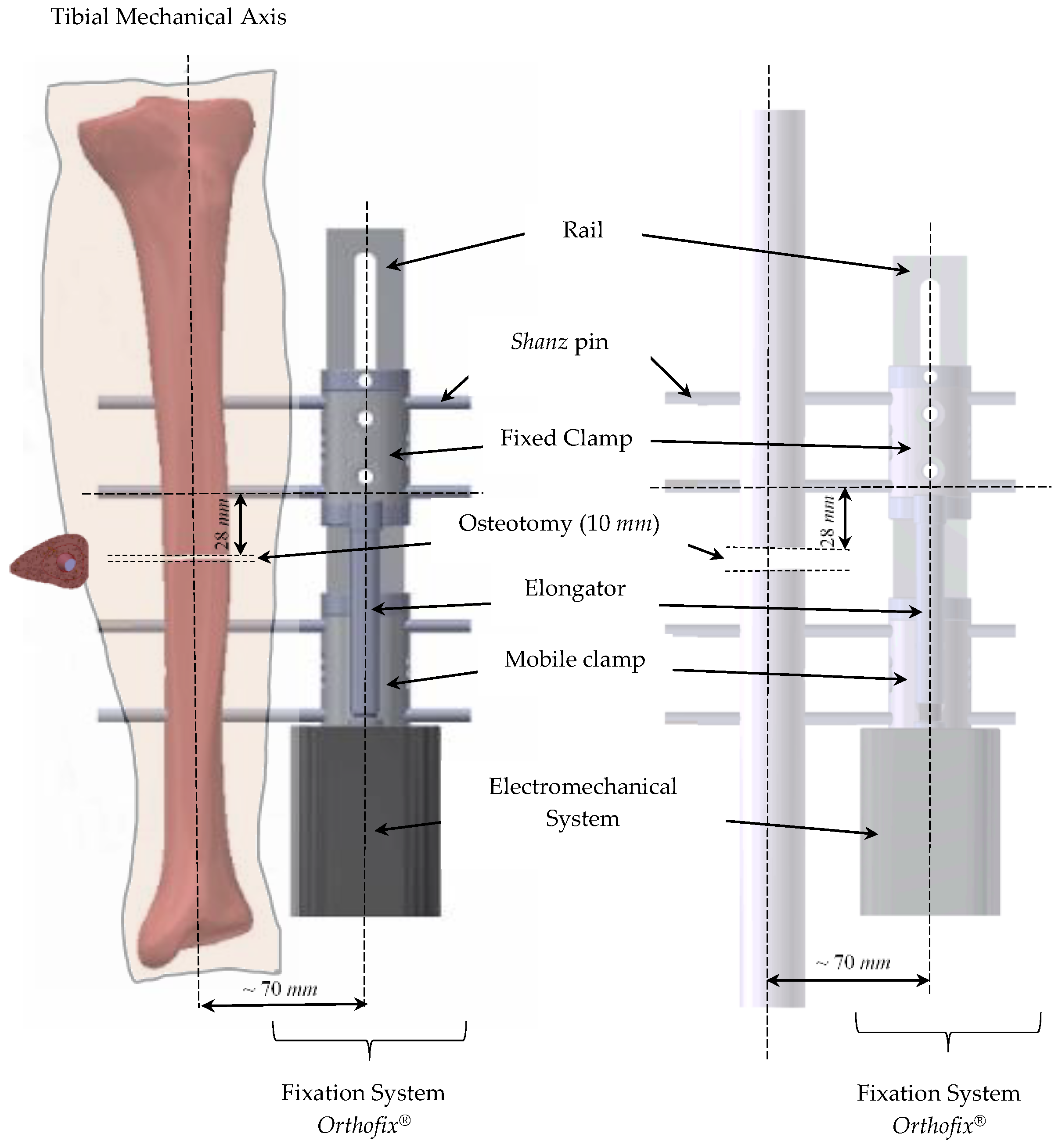
2.1. Experimental Models
2.2. Numerical Models
3. Results
3.1. Experimental Results
3.2. Numerical Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Perren, S.M. Evolution of the internal fixation of long bone fractures. The scientific basis of biological internal fixation: Choosing a new balance between stability and biology. J. Bone Joint Surg. Br. 2002, 84, 1093–1110. [Google Scholar] [CrossRef] [PubMed]
- Cunningham, J. The biomechanics of frature fixation. Curr. Orthop. 2001, 15, 457–464. [Google Scholar] [CrossRef]
- Hente, R.; Füchtmeier, B.; Schlegel, U.; Ernstberger, A.; Perren, S.M. The influence of cyclic compression and distraction on the healing of experimental tibial fractures. J. Orthop. Res. 2004, 22, 709–715. [Google Scholar] [CrossRef] [PubMed]
- Abulaiti, A.; Yilihamu, Y.; Yasheng, T.; Alike, Y.; Yusufu, A. The psychological impact of external fixation using the Ilizarov or Orthofix LRS method to treat tibial osteomyelitis with a bone defect. Injury 2017, 48, 2842–2846. [Google Scholar] [CrossRef] [PubMed]
- Yilihamu, Y.; Keremu, A.; Abulaiti, A.; Maimaiti, X.; Ren, P.; Yusufu, A. Outcomes of post-traumatic tibial osteomyelitis treated with an Orthofix LRS versus an Ilizarov external fixator. Injury 2017, 48, 1636–1643. [Google Scholar] [CrossRef] [PubMed]
- Chavoshnejad, P.; Ayati, M.; Abbasspour, A.; Karimpur, M.; George, D.; Rémond, Y.; Heidary Rouchi, A.; Baniassadi, M. Optimization of Taylor spatial frame half-pins diameter for bone deformity correction: Application to femur. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2018, 232, 673–681. [Google Scholar] [CrossRef] [PubMed]
- Kalinowski, A.; Linessio, R.P.; Mendonca, C.J.A.; Antunes, P.; Ramos, A.; Silva, J.C.C. Da Noninvasive Optical Instrumentation for Bone Healing Process Analysis. IEEE Sens. J. 2021, 21, 14060–14068. [Google Scholar] [CrossRef]
- Barcik, J.; Epari, D.R.; Ibrahim, T.; Mercatali, L.; Maria Donati, D. Can Optimizing the Mechanical Environment Deliver a Clinically Significant Reduction in Fracture Healing Time? Biomedicines 2021, 9, 691. [Google Scholar] [CrossRef]
- Ernst, M.; Richards, R.G.; Windolf, M. Smart implants in fracture care—Only buzzword or real opportunity? Injury 2021, 52 (Suppl. 2), S101–S105. [Google Scholar] [CrossRef]
- Ledet, E.H.; Liddle, B.; Kradinova, K.; Harper, S. Smart implants in orthopedic surgery, improving patient outcomes: A review. Innov. Entrep. Health 2018, 5, 41. [Google Scholar] [CrossRef]
- Andreu-Perez, J.; Leff, D.R.; Ip, H.M.D.; Yang, G.Z. From Wearable Sensors to Smart Implants–Toward Pervasive and Personalized Healthcare. IEEE Trans. Biomed. Eng. 2015, 62, 2750–2762. [Google Scholar] [CrossRef] [PubMed]
- Lange, H.E.; Arbeiter, N.; Bader, R.; Kluess, D. Performance of a Piezoelectric Energy Harvesting System for an Energy-Autonomous Instrumented Total Hip Replacement: Experimental and Numerical Evaluation. Materials 2021, 14, 5151. [Google Scholar] [CrossRef] [PubMed]
- Duda, G.N.; Mandruzzato, F.; Heller, M.; Goldhahn, J.; Moser, R.; Hehli, M.; Claes, L.; Haas, N.P. Mechanical boundary conditions of fracture healing: Borderline indications in the treatment of unreamed tibial nailing. J. Biomech. 2001, 34, 639–650. [Google Scholar] [CrossRef]
- ASM International Handbook Committee. Properties and Selection: Nonferrous Alloys and Special-Purpose Materials. ASM Int. 1998, 2, 1143–1144. [Google Scholar]
- Silva, R. Estudo Experimental Comparativo do Posicionamento dos Componentes Estruturais de um Fixador Externo; University of Coimbra: Coimbra, Portugal, 2017. [Google Scholar]
- Martins Amaro, A.; Paulino, M.F.; Roseiro, L.M.; Neto, M.A.; Fátima Paulino, M.; Manuel Roseiro, L.; Augusta Neto, M. The Effect of External Fixator Configurations on the Dynamic Compression Load: An Experimental and Numerical Study. Appl. Sci. 2020, 10, 3. [Google Scholar] [CrossRef]
- Tan, E.S.; Mat Jais, I.S.; Rahim, S.A.; Tay, S.C. Effect of interfragmentary gap on compression force in a headless compression screw used for scaphoid fixation. J. Hand Surg. Eur. Vol. 2018, 43, 93–96. [Google Scholar] [CrossRef]
- Sawbones®. Biomechanical Products Catalog; Sawbones®: Limhamn, Sweden, 2019. [Google Scholar]
- Ghiasi, M.S.; Chen, J.E.; Rodriguez, E.K.; Vaziri, A.; Nazarian, A. Computational modeling of human bone fracture healing affected by different conditions of initial healing stage. BMC Musculoskelet. Disord. 2019, 20, 562. [Google Scholar] [CrossRef]
- Zhao, X.; Li, J.; Chen, Y.; Tao, C.; Ji, R. Investigation of load transfer process between external fixator and bone model by experimental and finite element methods. J. Appl. Biomater. Funct. Mater. 2019, 17, 2280800019826512. [Google Scholar] [CrossRef]
- Isaksson, H.; Wilson, W.; van Donkelaar, C.C.; Huiskes, R.; Ito, K. Comparison of biophysical stimuli for mechano-regulation of tissue differentiation during fracture healing. J. Biomech. 2006, 39, 1507–1516. [Google Scholar] [CrossRef]
- Lacroix, D.; Prendergast, P.J. A mechano-regulation model for tissue differentiation during fracture healing: Analysis of gap size and loading. J. Biomech. 2002, 35, 1163–1171. [Google Scholar] [CrossRef]
- Lopes, V.M.M.; Neto, M.A.; Amaro, A.M.; Roseiro, L.M.; Paulino, M.F. FE and experimental study on how the cortex material properties of synthetic femurs affect strain levels. Med. Eng. Phys. 2017, 46, 96–109. [Google Scholar] [CrossRef] [PubMed]
- Kenwright, J.; Richardson, J.B.; Cunningham, J.L.; White, S.H.; Goodship, A.E.; Adams, M.A.; Magnussen, P.A.; Newman, J.H. Axial movement and tibial fractures. A controlled randomised trial of treatment. J. Bone Joint Surg. Br. 1991, 73, 654–659. [Google Scholar] [CrossRef] [PubMed]
- Wehner, T.; Claes, L.; Niemeyer, F.; Nolte, D.; Simon, U. Influence of the fixation stability on the healing time--a numerical study of a patient-specific fracture healing process. Clin. Biomech. 2010, 25, 606–612. [Google Scholar] [CrossRef] [PubMed]
- Sigurdsen, U.; Reikeras, O.; Utvag, S.E. The influence of compression on the healing of experimental tibial fractures. Injury 2011, 42, 1152–1156. [Google Scholar] [CrossRef] [PubMed]
- Claes, L.; Augat, P.; Suger, G.; Wilke, H.J. Influence of size and stability of the osteotomy gap on the success of fracture healing. J. Orthop. Res. 1997, 15, 577–584. [Google Scholar] [CrossRef] [PubMed]
- Miramini, S.; Zhang, L.; Richardson, M.; Mendis, P.; Ebeling, P.R. Influence of fracture geometry on bone healing under locking plate fixations: A comparison between oblique and transverse tibial fractures. Med. Eng. Phys. 2016, 38, 1100–1108. [Google Scholar] [CrossRef]
- Gardner, T.N.; Evans, M.; Kenwright, J. The influence of external fixators on fracture motion during simulated walking. Med. Eng. Phys. 1996, 18, 305–313. [Google Scholar] [CrossRef]
- Glatt, V.; Bartnikowski, N.; Quirk, N.; Schuetz, M.; Evans, C. Reverse Dynamization: Influence of Fixator Stiffness on the Mode and Efficiency of Large-Bone-Defect Healing at Different Doses of rhBMP-2. J. Bone Joint Surg. Am. 2016, 98, 677. [Google Scholar] [CrossRef]
- Glatt, V.; Evans, C.H.; Tetsworth, K. A Concert between Biology and Biomechanics: The Influence of the Mechanical Environment on Bone Healing. Front. Physiol. 2017, 7, 678. [Google Scholar] [CrossRef]
- Li, J.; Zhao, X.; Hu, X.; Tao, C.; Ji, R. A theoretical analysis and finite element simulation of fixator–bone system stiffness on healing progression. J. Appl. Biomater. Funct. Mater. 2018, 16, 115–125. [Google Scholar] [CrossRef]
- Betts, D.C.; Müller, R. Mechanical Regulation of Bone Regeneration: Theories, Models, and Experiments. Front. Endocrinol. 2014, 5, 211. [Google Scholar] [CrossRef] [PubMed]
- Hente, R.; Cordey, J.; Perren, S.M. In vivo measurement of bending stiffness in fracture healing. Biomed. Eng. Online 2003, 2, 8. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Wehner, T.; Gruchenberg, K.; Bindl, R.; Recknagel, S.; Steiner, M.; Ignatius, A.; Claes, L. Temporal delimitation of the healing phases via monitoring of fracture callus stiffness in rats. J. Orthop. Res. 2014, 32, 1589–1595. [Google Scholar] [CrossRef] [PubMed]
- McGilvray, K.C.; Unal, E.; Troyer, K.L.; Santoni, B.G.; Palmer, R.H.; Easley, J.T.; Demir, H.V.; Puttlitz, C.M. Implantable microelectromechanical sensors for diagnostic monitoring and post-surgical prediction of bone fracture healing. J. Orthop. Res. 2015, 33, 1439–1446. [Google Scholar] [CrossRef]
- Wolynski, J.G.; Labus, K.M.; Easley, J.T.; Notaroš, B.M.; Ilić, M.M.; Puttlitz, C.M.; McGilvray, K.C. Diagnostic prediction of ovine fracture healing outcomes via a novel multi-location direct electromagnetic coupling antenna. Ann. Transl. Med. 2021, 9, 1223. [Google Scholar] [CrossRef]
- Gadomski, B.C.; McGilvray, K.C.; Easley, J.T.; Palmer, R.H.; Santoni, B.G.; Puttlitz, C.M. Partial gravity unloading inhibits bone healing responses in a large animal model. J. Biomech. 2014, 47, 2836–2842. [Google Scholar] [CrossRef]
- Tan, Y.; Hu, J.; Ren, L.; Zhu, J.; Yang, J.; Liu, D. A Passive and Wireless Sensor for Bone Plate Strain Monitoring. Sensors 2017, 17, 2635. [Google Scholar] [CrossRef]
- Seide, K.; Weinrich, N.; Wenzl, M.E.; Wolter, D.; Jürgens, C. Three-dimensional load measurements in an external fixator. J. Biomech. 2004, 37, 1361–1369. [Google Scholar] [CrossRef]
- Claes, L.E.; Cunningham, J.L. Monitoring the Mechanical Properties of Healing Bone. Clin. Orthop. Relat. Res. 2009, 467, 1964. [Google Scholar] [CrossRef]
- Seide, K.; Aljudaibi, M.; Weinrich, N.; Kowald, B.; Jürgens, C.; Müller, J.; Faschingbauer, M. Telemetric assessment of bone healing with an instrumented internal fixator: A preliminary study. J. Bone Jt. Surg.-Ser. B 2012, 94-B, 398–404. [Google Scholar] [CrossRef]
- Grasa, J.; Gómez-Benito, M.J.; González-Torres, L.A.; Asiaín, D.; Quero, F.; García-Aznar, J.M. Monitoring in vivo load transmission through an external fixator. Ann. Biomed. Eng. 2010, 38, 605–612. [Google Scholar] [CrossRef] [PubMed]
- Goodship, A.E.; Kenwright, J. The influence of induced micromovement upon the healing of experimental tibial fractures. J. Bone Joint Surg. Br. 1985, 67, 650–655. [Google Scholar] [CrossRef] [PubMed]
- Tufekci, P.; Tavakoli, A.; Dlaska, C.; Neumann, M.; Shanker, M.; Saifzadeh, S.; Steck, R.; Schuetz, M.; Epari, D. Early mechanical stimulation only permits timely bone healing in sheep. J. Orthop. Res. 2018, 36, 1790–1796. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation | Density [kg/m3] | Young Modulus [GPa] | Coefficient of Poisson |
|---|---|---|---|
| Trabecular Bone, [13] | 300 | 0.7 | 0.20 |
| Cortical Bone, [13] | 1800 | 17.0 | 0.30 |
| External fixator Orthofix® LRS (AISI 7075 T6), [14] | 2810 | 72.0 | 0.33 |
| Schanz pin (AISI 316L), [14] | 8027 | 200.0 | 0.27 |
| Solid Foam | 10 PCF | 15 PCF | 20 PCF | 30 PCF | 40 PCF | 50 PCF |
|---|---|---|---|---|---|---|
| Density [g/cm3] | 0.16 | 0.24 | 0.32 | 0.48 | 0.64 | 0.80 |
| Tensile Strength [MPa] | 2.1 | 3.7 | 5.6 | 12.0 | 19.0 | 27.0 |
| Young Modulus (traction) [GPa] | 0.086 | 0.173 | 0.284 | 0.592 | 1.0 | 1.469 |
| Compressive Strength [MPa] | 2.2 | 4.9 | 8.4 | 18.0 | 31.0 | 48.0 |
| Young Modulus (Comp.) [GPa] | 0.058 | 0.123 | 0.210 | 0.445 | 0.759 | 1.148 |
| Coefficient of Poisson | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 |
| Stiffness [MPa] | ||
|---|---|---|
| Fibrous Tissue | 0.2 | |
| Sawbones® 10 | 58 | →Stimulation |
| Sawbones® 15 | 123 | |
| Sawbones® 20 | 210 | |
| Sawbones® 30 | 445 | |
| Sawbones® 40 | 759 | |
| Immature Bone | 1000 | |
| Sawbones® 50 | 1148 | |
| Mature Bone | 6000 | |
| Cortical Bone | 20,000 |
| Simplified | Anatomic | |
|---|---|---|
| Elements | 272075 | 373624 |
| Nodes |
| Prescribed [mm] | PA6 Model | AN Model | ||
|---|---|---|---|---|
| Osteotomy [mm] | Ratio [%] | Osteotomy [mm] | Ratio [%] | |
| 2 | 0.33 | 17% | 0.37 | 19% |
| 1.5 | 0.19 | 13% | 0.21 | 14% |
| 1 | 0.1 | 10% | 0.16 | 16% |
| Osteotomy Material | PA6 Model [mm] | AN Model [mm] | ||
|---|---|---|---|---|
| Average | Maximum | Average | Maximum | |
| S10 | 0.35 | 0.49 | 0.55 | 0.59 |
| S15 | 0.30 | 0.43 | 0.48 | 0.52 |
| S20 | 0.29 | 0.38 | 0.42 | 0.46 |
| S30 | 0.20 | 0.29 | 0.30 | 0.34 |
| S40 | 0.12 | 0.18 | 0.14 | 0.17 |
| S50 | 0.11 | 0.16 | 0.11 | 0.14 |
| Osteotomy Material | Maximum Contact Force [N] | |
|---|---|---|
| PA6 Model | AN Model | |
| S10 | 0.671 | 0.388 |
| S15 | 0.735 | 0.437 |
| S20 | 0.798 | 0.482 |
| S30 | 0.886 | 0.570 |
| S40 | 0.961 | 0.684 |
| S50 | 0.945 | 0.691 |
| Osteotomy Material | PA6 Model [mm] | AN Model [mm] | ||
|---|---|---|---|---|
| Experimental | Error [%] |(Exp-Num)/Exp| | Experimental | Error [%] |(Exp-Num)/Exp| | |
| S10 | 0.36 | 3 | 0.49 | 13 |
| S15 | 0.34 | 12 | 0.44 | 10 |
| S20 | 0.33 | 13 | 0.37 | 12 |
| S30 | 0.23 | 11 | 0.26 | 18 |
| S40 | 0.12 | 3 | 0.12 | 17 |
| S50 | 0.11 | 0.0 | 0.10 | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paulino, M.F.; Roseiro, L.M.; Balacó, I.; Neto, M.A.; Amaro, A.M. Evaluation of Bone Consolidation in External Fixation with an Electromechanical System. Appl. Sci. 2022, 12, 2328. https://doi.org/10.3390/app12052328
Paulino MF, Roseiro LM, Balacó I, Neto MA, Amaro AM. Evaluation of Bone Consolidation in External Fixation with an Electromechanical System. Applied Sciences. 2022; 12(5):2328. https://doi.org/10.3390/app12052328
Chicago/Turabian StylePaulino, Maria F., Luis M. Roseiro, Inês Balacó, Maria A. Neto, and Ana M. Amaro. 2022. "Evaluation of Bone Consolidation in External Fixation with an Electromechanical System" Applied Sciences 12, no. 5: 2328. https://doi.org/10.3390/app12052328
APA StylePaulino, M. F., Roseiro, L. M., Balacó, I., Neto, M. A., & Amaro, A. M. (2022). Evaluation of Bone Consolidation in External Fixation with an Electromechanical System. Applied Sciences, 12(5), 2328. https://doi.org/10.3390/app12052328