Modeling the Static Force of a Festo Pneumatic Muscle Actuator: A New Approach and a Comparison to Existing Models


Abstract
:1. Introduction
2. The Static Force Characteristic
3. A New Model of the Static Force Characteristic
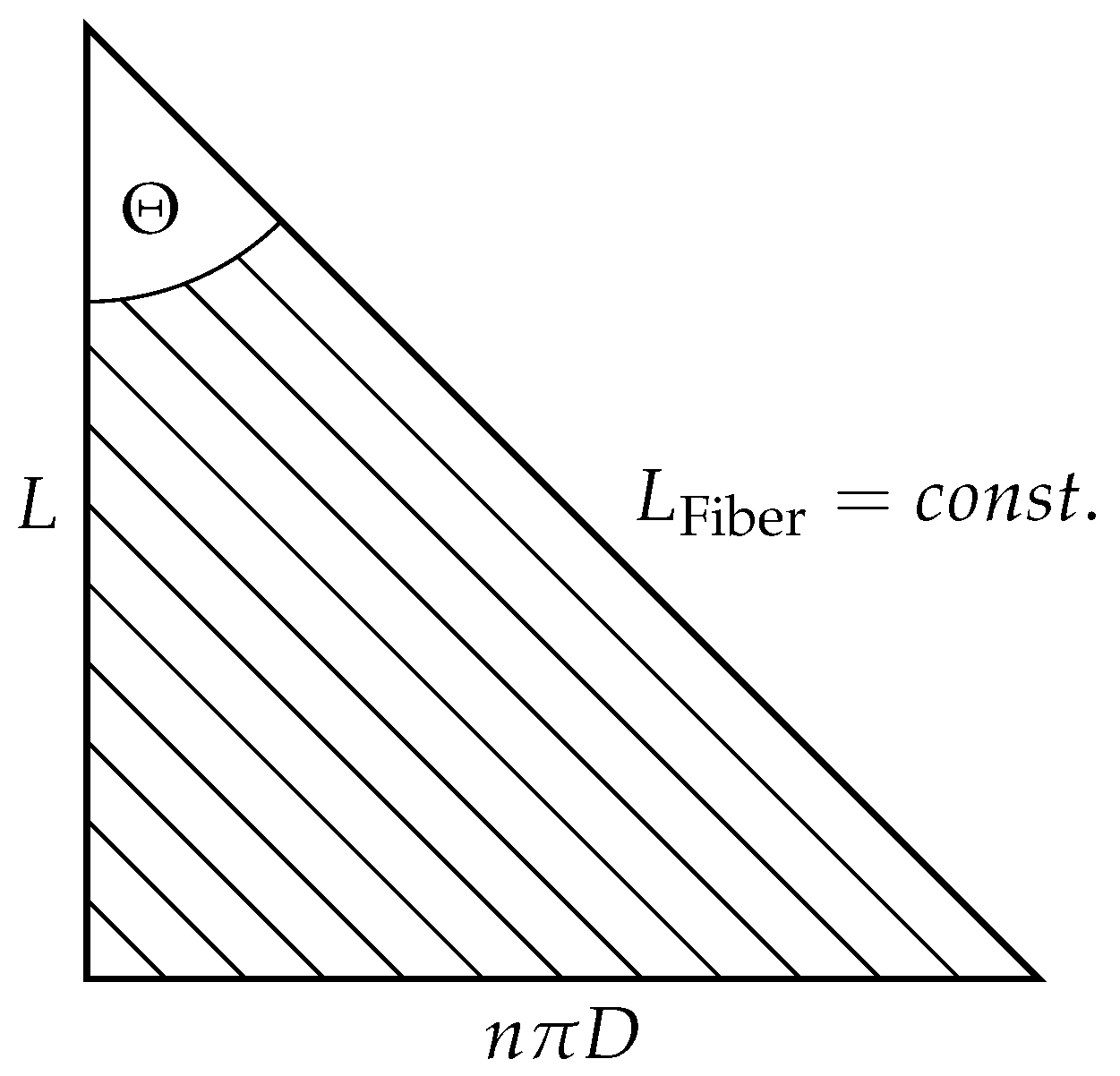
3.1. PMA Volume
3.2. Energy-Based Modeling
3.2.1. Virtual Work of the Changing Air Volume
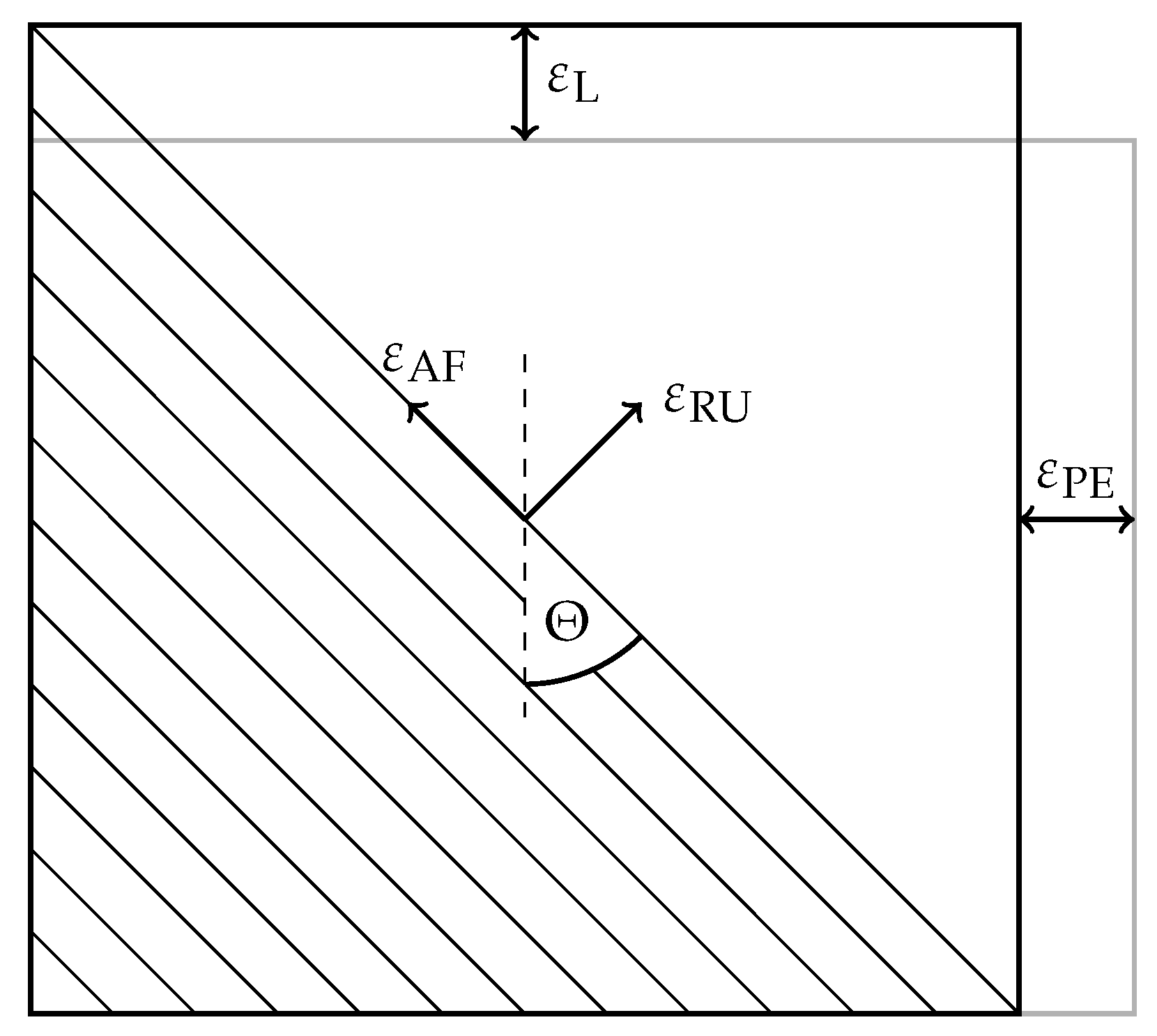
3.2.2. Elastic Energy of the Membrane
3.2.3. Summarizing the Energy
4. Validation and Comparison to Existing Models
4.1. Existing Models
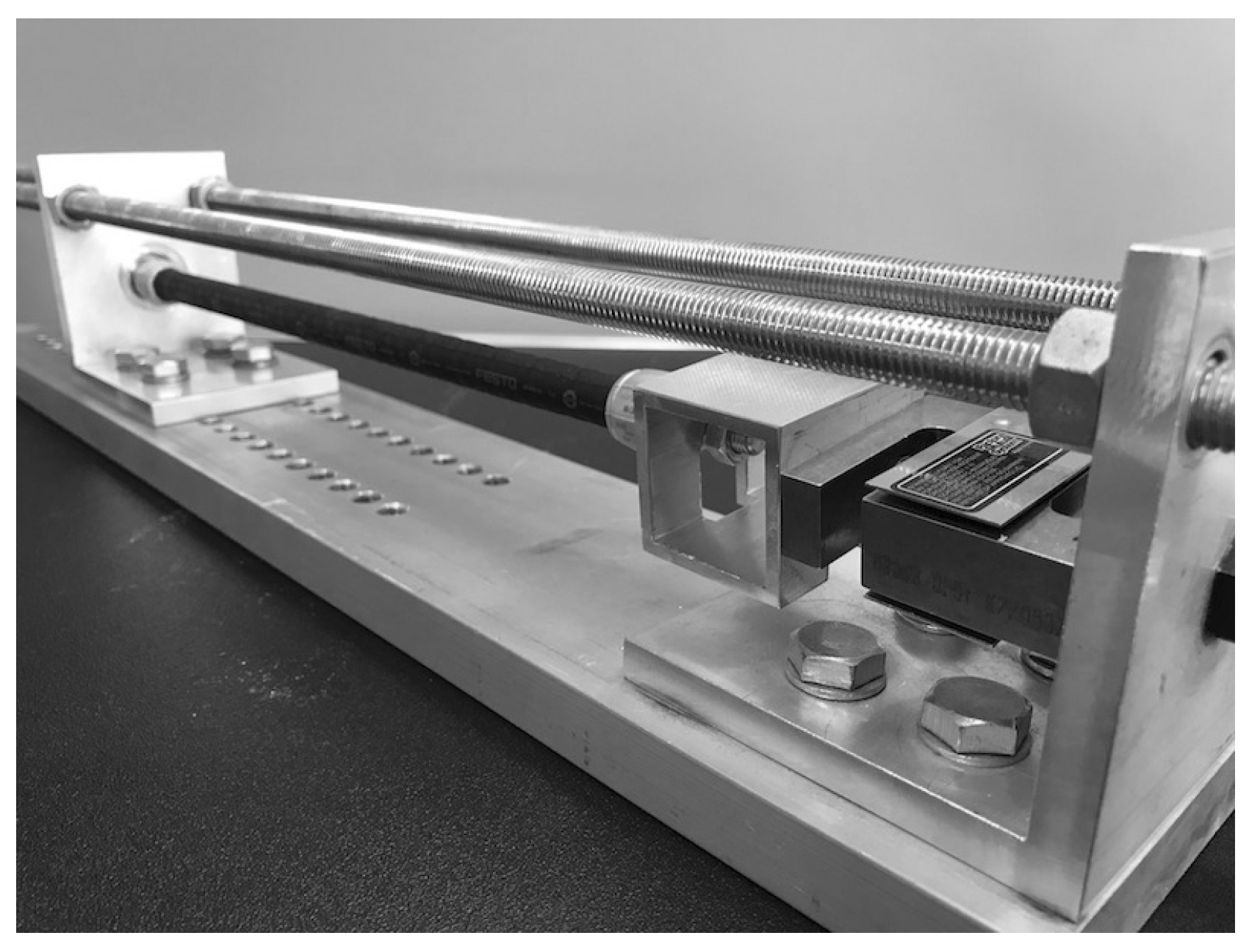
4.2. Test Rig
4.3. Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Measurement Data
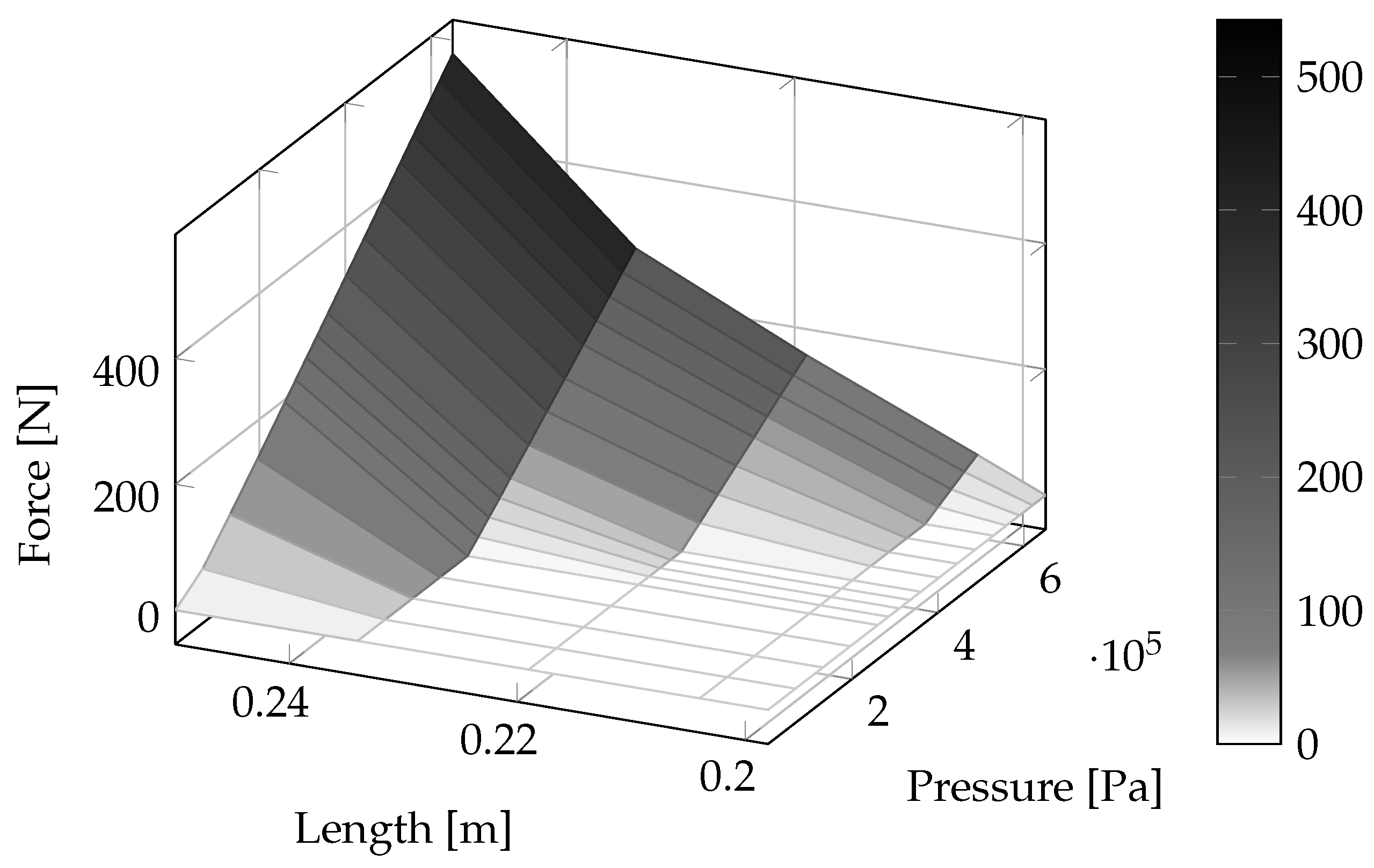
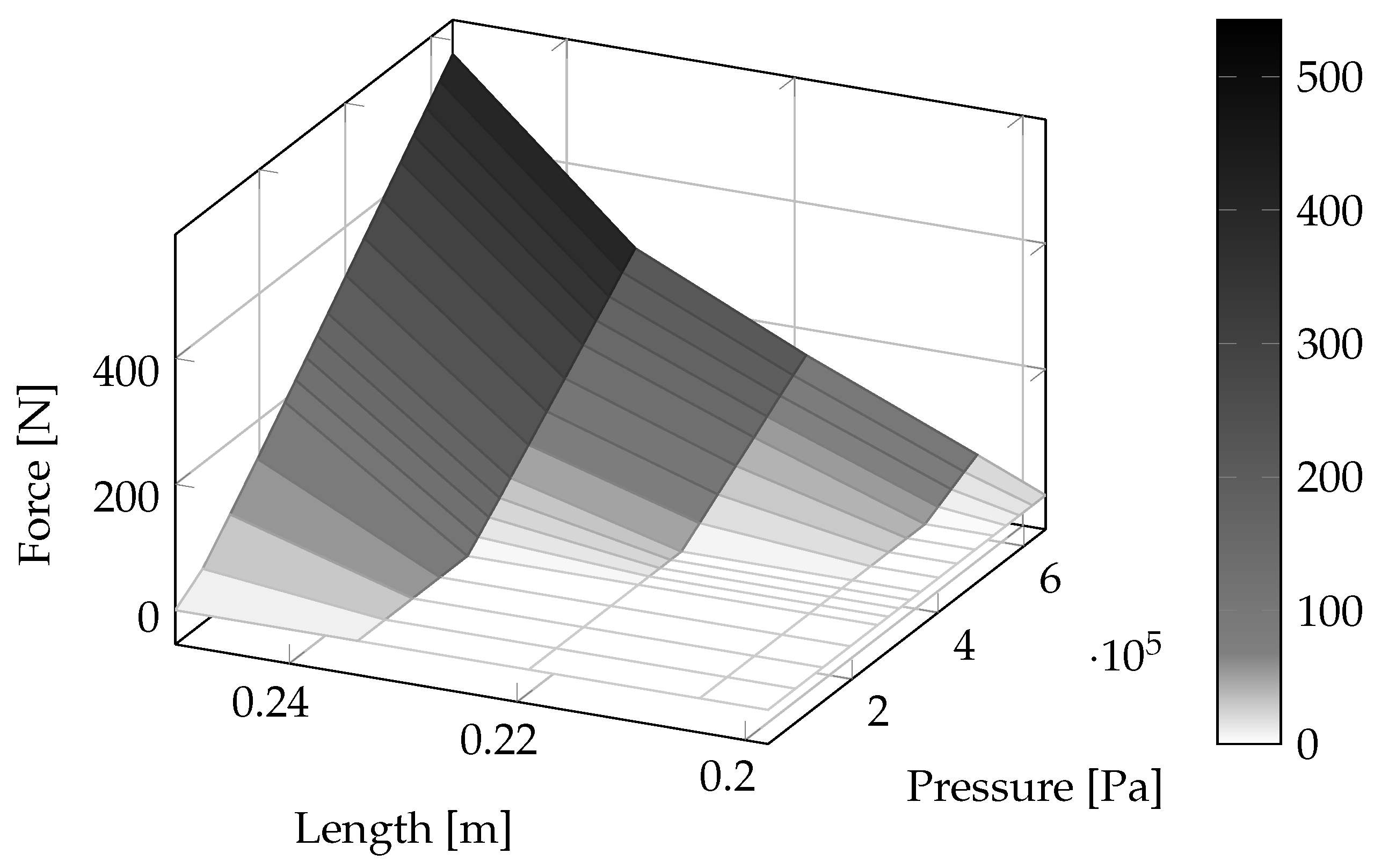
Appendix A.1. Force Map of DMSP-20-300

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length [m] | 0.296 | 0.282 | 0.267 | 0.25 | 0.237 | 0.222 | |
|---|---|---|---|---|---|---|---|
| Pressure [Pa] | |||||||
| 35,000 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 60,000 | 54.9 | 0 | 0 | 0 | 0 | 0 | |
| 85,000 | 113.4 | 0 | 0 | 0 | 0 | 0 | |
| 110,000 | 179 | 0 | 0 | 0 | 0 | 0 | |
| 135,000 | 241.8 | 0 | 0 | 0 | 0 | 0 | |
| 146,250 | 273.3 | 21.1 | 0 | 0 | 0 | 0 | |
| 157,500 | 300.2 | 42.9 | 0 | 0 | 0 | 0 | |
| 168,750 | 331 | 70.3 | 0 | 0 | 0 | 0 | |
| 180,000 | 355.6 | 93.7 | 0 | 0 | 0 | 0 | |
| 197,500 | 402.5 | 131 | 27.7 | 0 | 0 | 0 | |
| 215,000 | 446.5 | 165.2 | 61.6 | 0 | 0 | 0 | |
| 232,500 | 495.9 | 204.1 | 92.7 | 0 | 0 | 0 | |
| 250,000 | 543.4 | 244.7 | 122 | 0 | 0 | 0 | |
| 281,250 | 623.5 | 309.7 | 170.2 | 42.8 | 0 | 0 | |
| 312,500 | 708.8 | 380.4 | 221 | 80.6 | 0 | 0 | |
| 343,750 | 787.9 | 443.7 | 277.4 | 118.7 | 0 | 0 | |
| 375,000 | 870.9 | 518.9 | 328 | 157.6 | 0 | 0 | |
| 450,000 | 1065.2 | 676.4 | 462.3 | 252.1 | 65.5 | 0 | |
| 525,000 | 1268.9 | 837.5 | 587.8 | 352.3 | 124.7 | 0 | |
| 600,000 | 1460.1 | 1004 | 714.8 | 443.5 | 188.1 | 0 | |
| 675,000 | 1653.5 | 1164.3 | 840.7 | 535.8 | 253.3 | 0 | |
Appendix A.2. Force Map of DMSP-10-250
| Length [m] | 0.25 | 0.234 | 0.219 | 0.204 | 0.198 | |
|---|---|---|---|---|---|---|
| Pressure [Pa] | ||||||
| 5000 | 0 | 0 | 0 | 0 | 0 | |
| 68,750 | 32.1667 | 0 | 0 | 0 | 0 | |
| 132,500 | 84.8333 | 0 | 0 | 0 | 0 | |
| 196,250 | 139.5 | 0 | 0 | 0 | 0 | |
| 260,000 | 195.6667 | 0 | 0 | 0 | 0 | |
| 285,000 | 217.6667 | 17 | 0 | 0 | 0 | |
| 310,000 | 239.6667 | 35.1667 | 0 | 0 | 0 | |
| 335,000 | 261.6667 | 52.6667 | 0 | 0 | 0 | |
| 360,000 | 283.8333 | 71.3333 | 0 | 0 | 0 | |
| 402,187 | 321.5 | 101.5 | 22.8333 | 0 | 0 | |
| 444,375 | 359 | 132.3333 | 46.1667 | 0 | 0 | |
| 486,562 | 396.6667 | 162.5 | 69.3333 | 0 | 0 | |
| 528,750 | 434.3333 | 193.6667 | 92.1667 | 0 | 0 | |
| 559,062 | 461.6667 | 216.3333 | 109.3333 | 11.5 | 0 | |
| 589,375 | 488.3333 | 238.1667 | 126.3333 | 23.3333 | 0 | |
| 619,688 | 515.8333 | 261 | 142.6667 | 35 | 0 | |
| 650,000 | 542.5 | 282.8333 | 158.6667 | 46 | 0 | |
References
- Boblan, I.; Maschuw, J.; Engelhardt, D.; Schulz, A.; Schwenk, H.; Bannasch, R.; Rechenberg, I. A human-like robot hand and arm with fluidic muscles: Modelling of a muscle driven joint with an antagonistic setup. In Proceedings of the 3rd International Symposium on Adaptive Motion in Animals and Machines, Ilmenau, Germany, 25–30 September 2005. [Google Scholar]
- Caldwell, D.G.; Tsagarakis, N.G.; Kousidou, S.; Costa, N.; Sarakoglou, I. “Soft” exoskeletons for upper and lower body rehabilitation—Design, control and testing. Int. J. Humanoid Robot. 2007, 4, 549–573. [Google Scholar] [CrossRef]
- Balasubramanian, S.; Wei, R.; Perez, M.; Shepard, B.; Koeneman, E.; Koeneman, J.; He, J. RUPERT: An exoskeleton robot for assisting rehabilitation of arm functions. In Proceedings of the 2008 Virtual Rehabilitation, Vancouver, BC, Canada, 25–27 August 2008. [Google Scholar]
- Noritsugu, T.; Tanaka, T. Application of rubber artificial muscle manipulator as a rehabilitation robot. IEEE/ASME Trans. Mechatron. 1997, 2, 259–267. [Google Scholar] [CrossRef] [Green Version]
- Festo AG. Datasheet—Fluidic Muscle DMSP/MAS; Festo AG: Esslingen am Neckar, Germany, 2016. [Google Scholar]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Motion Control. In Robotics: Modelling, Planning and Control; Springer: London, UK, 2009; pp. 303–361. [Google Scholar]
- Lin, C.J.; Lin, C.R.; Yu, S.K.; Chen, C.T. Hysteresis modeling and tracking control for a dual pneumatic artificial muscle system using Prandtl-Ishlinskii model. Mechatronics 2015, 28, 35–45. [Google Scholar] [CrossRef]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Incorporation of thermal expansion in static force modeling of pneumatic artificial muscles. In Proceedings of the 2015 23rd Mediterranean Conference on Control and Automation (MED), Torremolinos, Spain, 16–19 June 2015; pp. 414–420. [Google Scholar]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Novel Considerations on static force modeling of pneumatic muscle actuators. IEEE/ASME Trans. Mechatron. 2016, 21, 2647–2659. [Google Scholar] [CrossRef]
- Kerscher, T.; Albiez, J.; Zollner, J.M.; Dillmann, R. Evaluation of the dynamic model of fluidic muscles using quick-release. In Proceedings of the First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, 20–22 February 2006; pp. 637–642. [Google Scholar]
- Hildebrandt, A.; Sawodny, O.; Neumann, R.; Hartmann, A. A cascaded tracking control concept for pneumatic muscle actuators. In Proceedings of the 2003 European Control Conference (ECC), Cambridge, UK, 1–4 September 2003; pp. 2517–2522. [Google Scholar]
- Hildebrandt, A.; Sawodny, O.; Neumann, R.; Hartmann, A. Cascaded control concept of a robot with two degrees of freedom driven by four artificial pneumatic muscle actuators. In Proceedings of the 2005 American Control Conference, Portland, OR, USA, 8–10 June 2005. [Google Scholar]
- Martens, M.; Passon, A.; Boblan, I. A sensor-less approach of a torque controller for pneumatic muscle actuator driven joints. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 22–24 April 2017; pp. 477–482. [Google Scholar]
- Boblan, I. Modellbildung und Regelung Eines Fluidischen Muskelpaares. Ph.D. Thesis, Technical University of Berlin, Berlin, Germany, 2010. [Google Scholar]
- Tóthová, M.; Pitel, J. Simulation of actuator dynamics based on geometric model of pneumatic artificial muscle. In Proceedings of the 2013 IEEE 11th International Symposium on Intelligent Systems and Informatics (SISY), Subotica, Serbia, 26–28 September 2013; pp. 233–237. [Google Scholar]
- Schulte, H. The Characteristics of the McKibben Artificial Muscle. In The Application of External Power in Prosthetics and Orthotics; National Academy of Sciences—National Research Council: Washington, DC, USA, 1961. [Google Scholar]
- Chou, C.P.; Hannaford, B. Static and dynamic characteristics of McKibben pneumatic artificial muscles. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 281–286. [Google Scholar]
- Sárosi, J.; Biro, I.; Nemeth, J.; Cveticanin, L. Dynamic modeling of a pneumatic muscle actuator with two-direction motion. Mech. Mach. Theory 2015, 85, 25–34. [Google Scholar] [CrossRef]
- Wickramatunge, K.C.; Leephakpreeda, T. Study on mechanical behaviors of pneumatic artificial muscle. Int. J. Eng. Sci. 2010, 48, 188–198. [Google Scholar] [CrossRef]
- Kelasidi, E.; Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. A survey on pneumatic muscle actuators modeling. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Subotica, Serbia, 8–10 September 2011; pp. 1263–1269. [Google Scholar]
- Tsagarakis, N.; Caldwell, D.G. Improved modelling and assessment of pneumatic muscle actuators. In Proceedings of the 2000 ICRA IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000. [Google Scholar]



| - | - | - | - | - | - | - | |||
| 1 | 1 | - | - | - | - | - | |||
| - | 1 | 1 | 1 | 1 | 1 | ||||
| 1 | 1 | - | 1 | - | - | ||||
| 0 | - | - | - | - |
| DMSP-10-250 | |||||
| DMSP-20-300 |
| of | ||||||
|---|---|---|---|---|---|---|
| DMSP-10-250 | 46.1% | 20.05% | 13.49% | 10.12% | 5.1% | 4.4% |
| DMSP-20-300 | 30% | 13.04% | 8.2% | 5.75% | 3.59% | 2.35% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martens, M.; Boblan, I. Modeling the Static Force of a Festo Pneumatic Muscle Actuator: A New Approach and a Comparison to Existing Models. Actuators 2017, 6, 33. https://doi.org/10.3390/act6040033
Martens M, Boblan I. Modeling the Static Force of a Festo Pneumatic Muscle Actuator: A New Approach and a Comparison to Existing Models. Actuators. 2017; 6(4):33. https://doi.org/10.3390/act6040033
Chicago/Turabian StyleMartens, Mirco, and Ivo Boblan. 2017. "Modeling the Static Force of a Festo Pneumatic Muscle Actuator: A New Approach and a Comparison to Existing Models" Actuators 6, no. 4: 33. https://doi.org/10.3390/act6040033