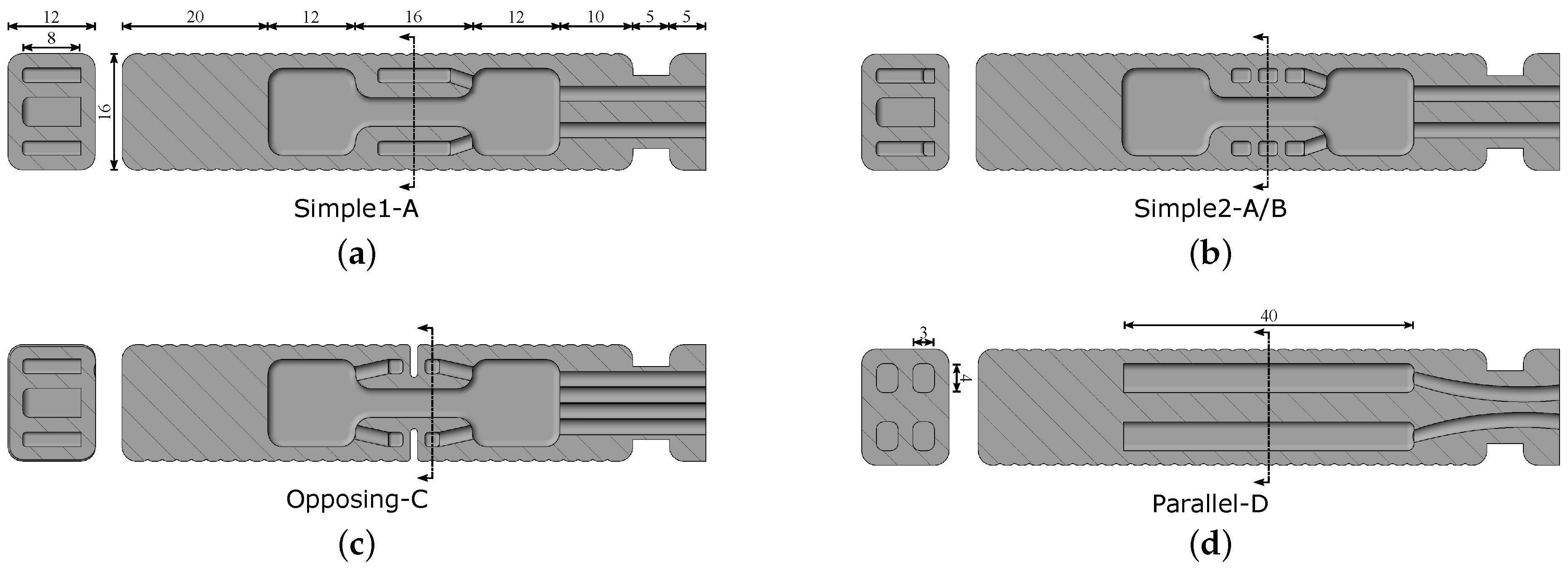
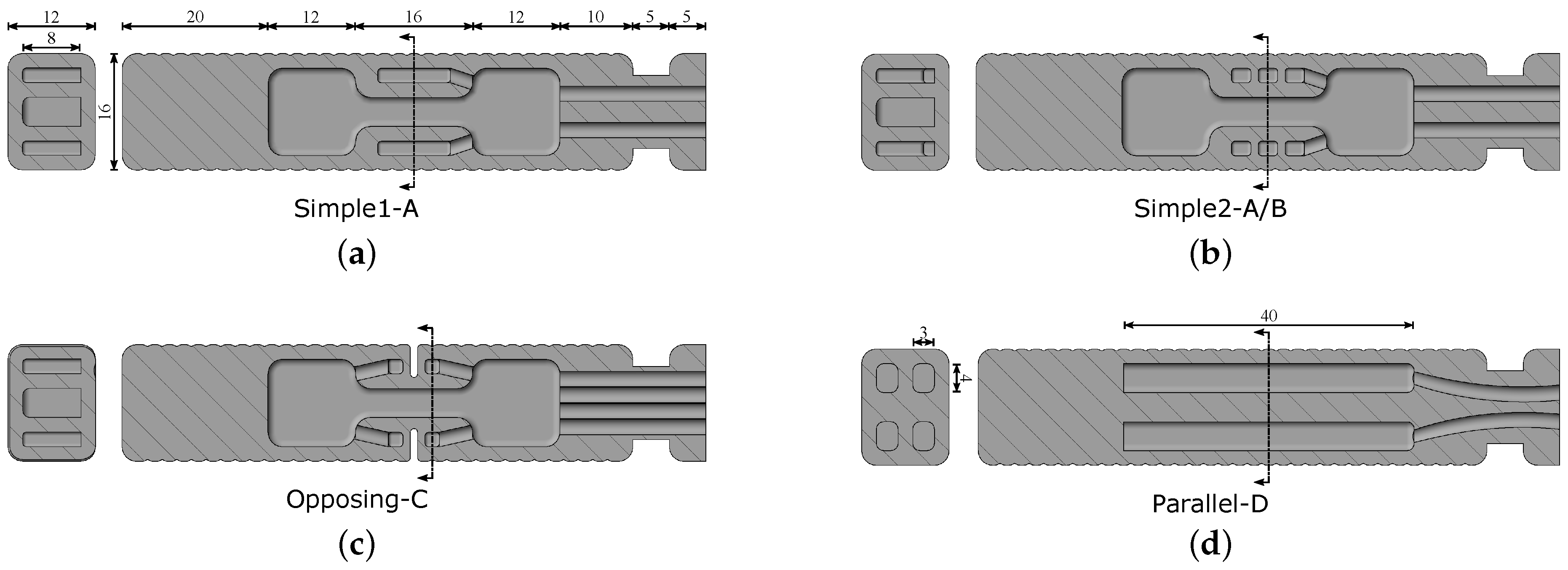
Figure 1.
Transverse (left) and longitudinal (right) cross-sections of the four internal geometries used in the fabricated prototypes, showing insertion routes for the input tubing. (a) Simple1, simple side-pockets without supporting internal walls; (b) Simple2, simple side-pockets with two supporting internal walls; (c) Opposing, opposing side-pockets; (d) Parallel, four parallel pockets.
Figure 1.
Transverse (left) and longitudinal (right) cross-sections of the four internal geometries used in the fabricated prototypes, showing insertion routes for the input tubing. (a) Simple1, simple side-pockets without supporting internal walls; (b) Simple2, simple side-pockets with two supporting internal walls; (c) Opposing, opposing side-pockets; (d) Parallel, four parallel pockets.
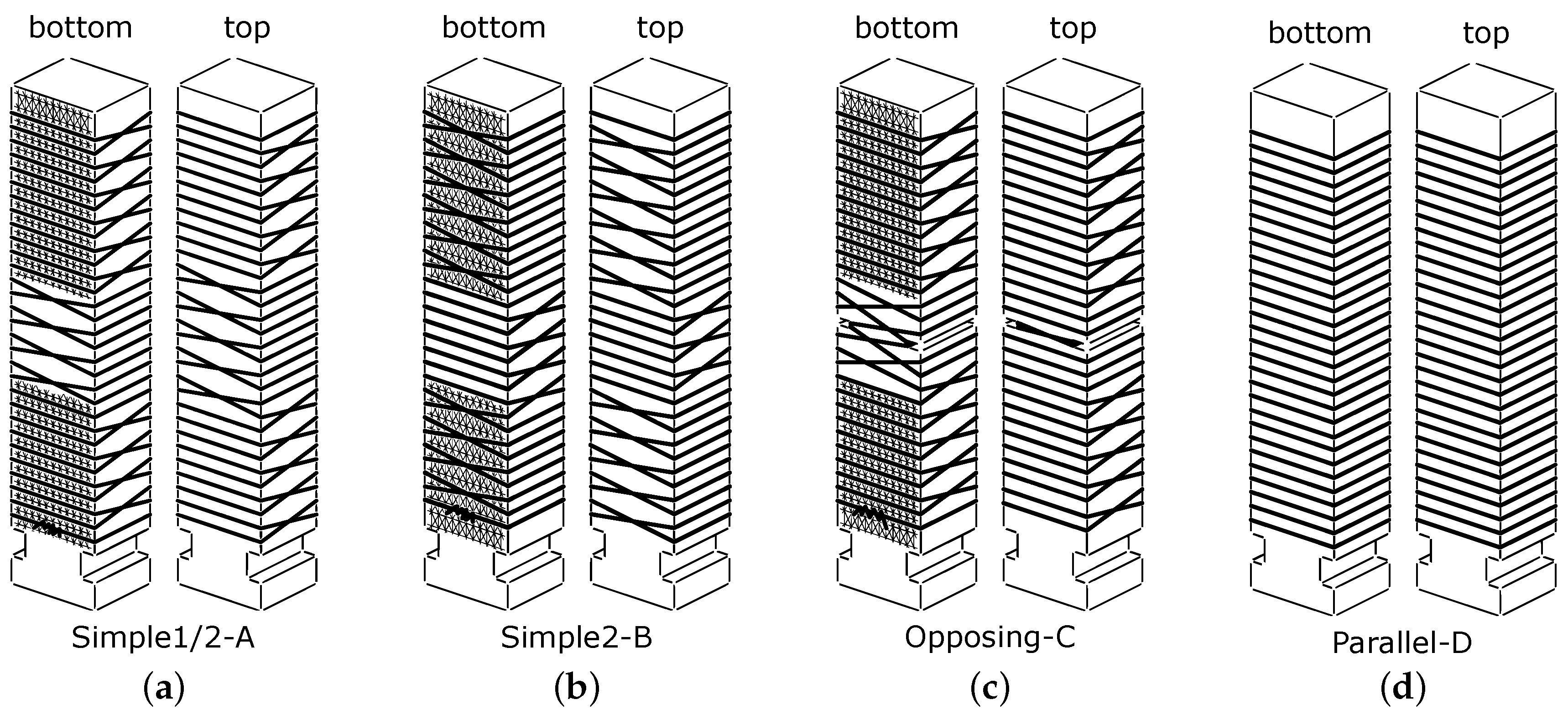
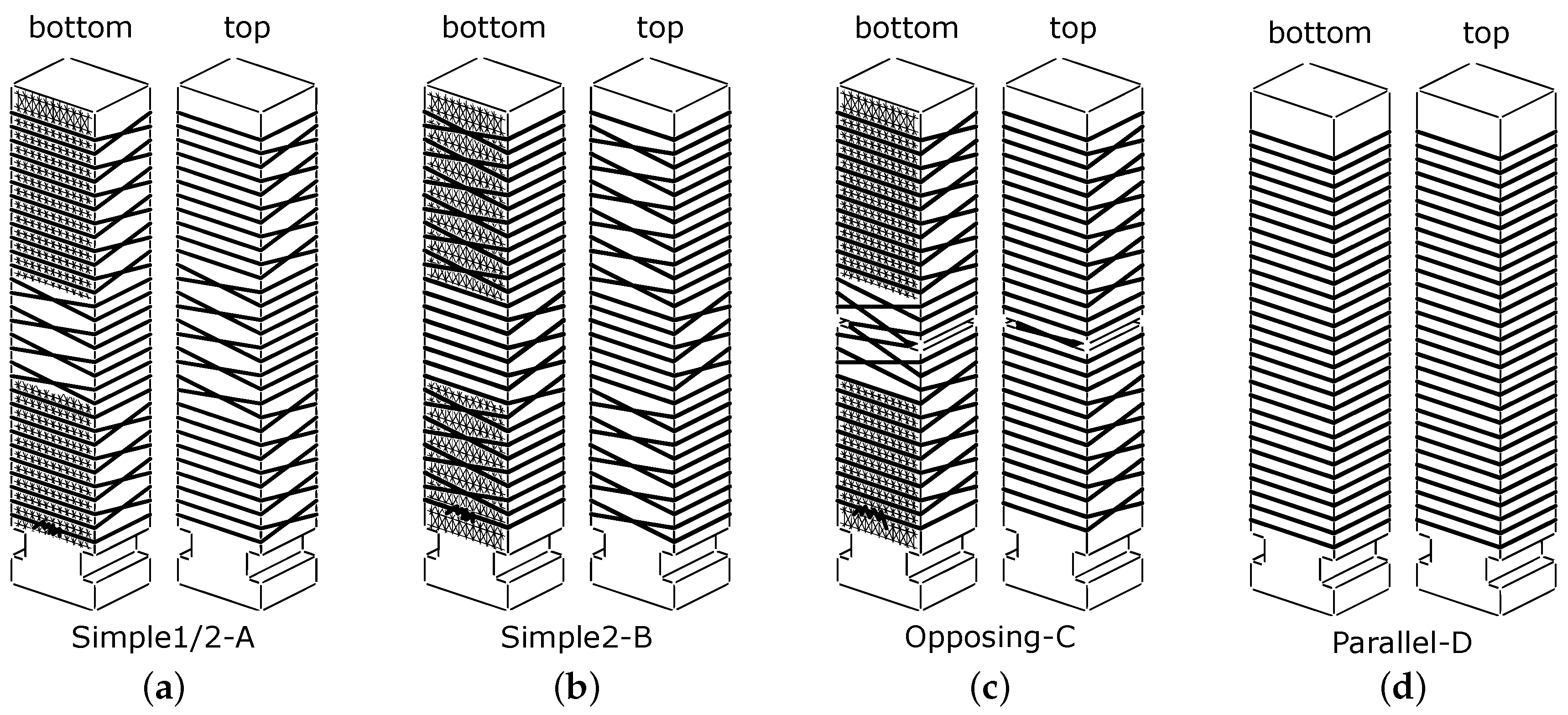
Figure 2.
The four different reinforcement layouts used in the fabricated prototypes. (a) A, two-directional thread winding, crossing itself on the bottom and top in the middle and on the sides otherwise; (b) B, two-directional winding, crossing in the opposite manner from A; (c) C, two-directional winding, crossing itself mainly on the bottom and once on the top in the middle; (d) D, single loops. A, B, and C had a strain-limiting layer under them, excluded from middle, while D had only the radial reinforcement thread.
Figure 2.
The four different reinforcement layouts used in the fabricated prototypes. (a) A, two-directional thread winding, crossing itself on the bottom and top in the middle and on the sides otherwise; (b) B, two-directional winding, crossing in the opposite manner from A; (c) C, two-directional winding, crossing itself mainly on the bottom and once on the top in the middle; (d) D, single loops. A, B, and C had a strain-limiting layer under them, excluded from middle, while D had only the radial reinforcement thread.
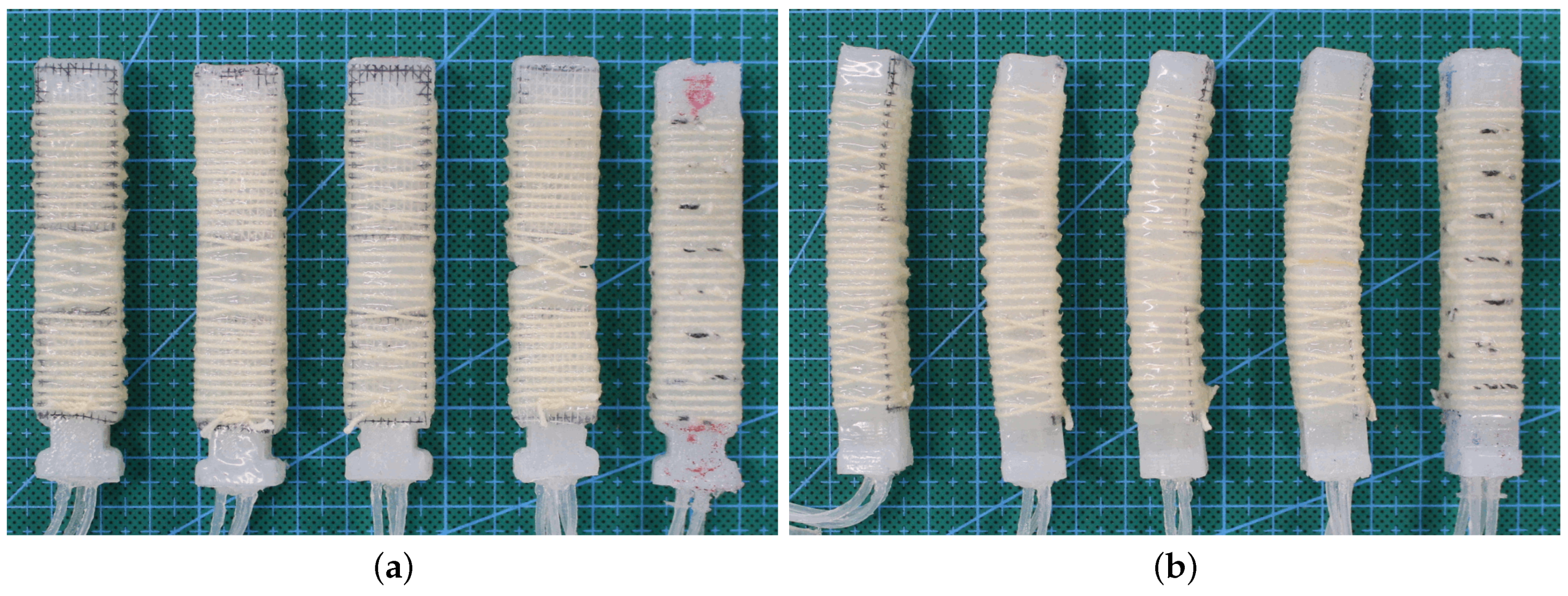
Figure 3.
The five prototypes shown from the (a) bottom and (b) right. From left to right: Simple1-A, Simple2-A, Simple2-B, Opposing-C, Parallel-D.
Figure 3.
The five prototypes shown from the (a) bottom and (b) right. From left to right: Simple1-A, Simple2-A, Simple2-B, Opposing-C, Parallel-D.
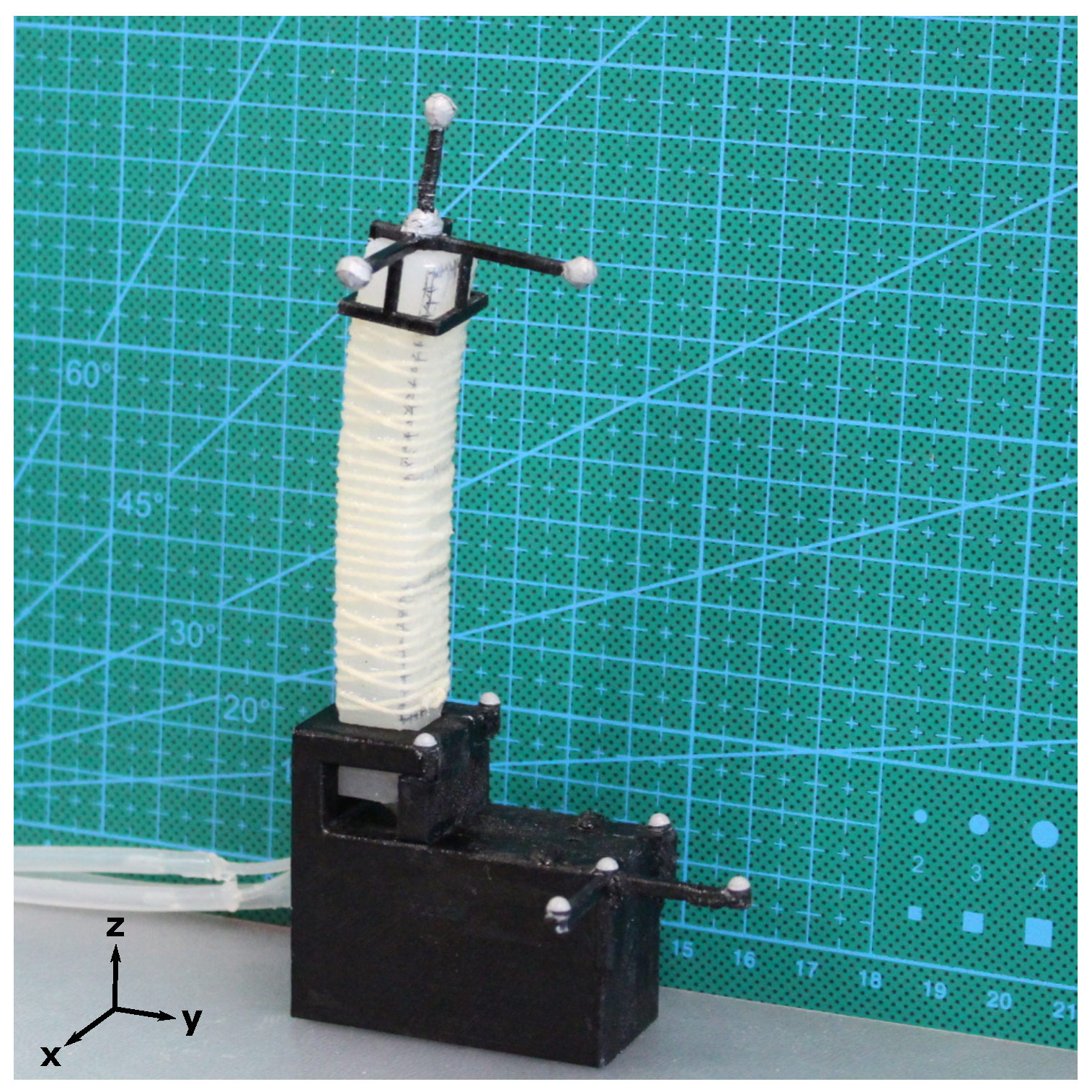
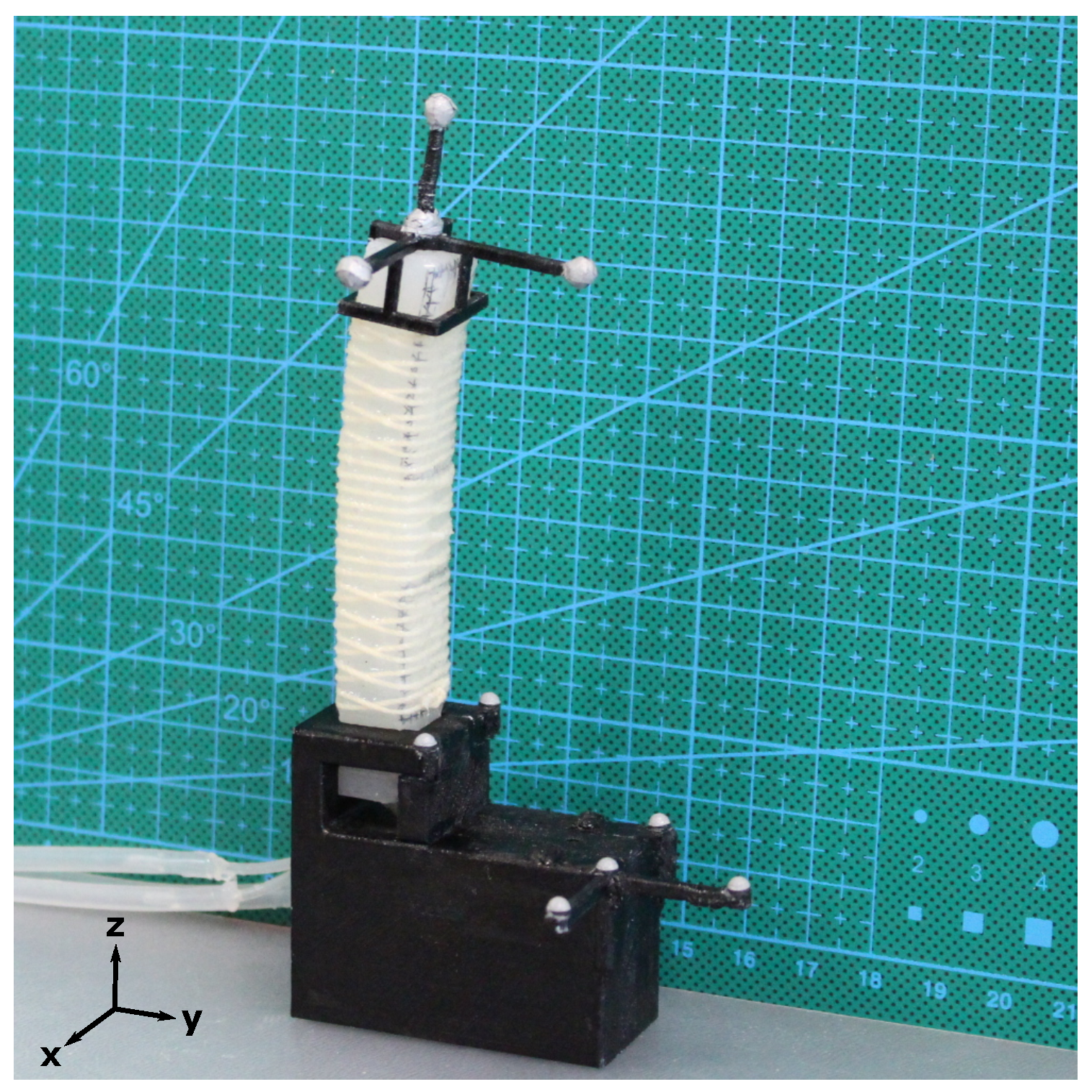
Figure 4.
Motion capture marker setup for trajectory measurements. The two center markers on the tip of the actuator formed its tip vector. Other markers were used as a reference.
Figure 4.
Motion capture marker setup for trajectory measurements. The two center markers on the tip of the actuator formed its tip vector. Other markers were used as a reference.
Figure 5.
Torque measurement setup with the dummy MCP joint. The joint angle was set to 0, 30 and 60 for flexion and 0 and 20 for abduction-adduction, keeping the distal bone perpendicular to the force gauge (above). Joint torque was then calculated from the measured force. (a) Parallel-D flexion, 60, 175 kPa; (b) Parallel-D abduction-adduction to the right, 0, 0 kPa.
Figure 5.
Torque measurement setup with the dummy MCP joint. The joint angle was set to 0, 30 and 60 for flexion and 0 and 20 for abduction-adduction, keeping the distal bone perpendicular to the force gauge (above). Joint torque was then calculated from the measured force. (a) Parallel-D flexion, 60, 175 kPa; (b) Parallel-D abduction-adduction to the right, 0, 0 kPa.
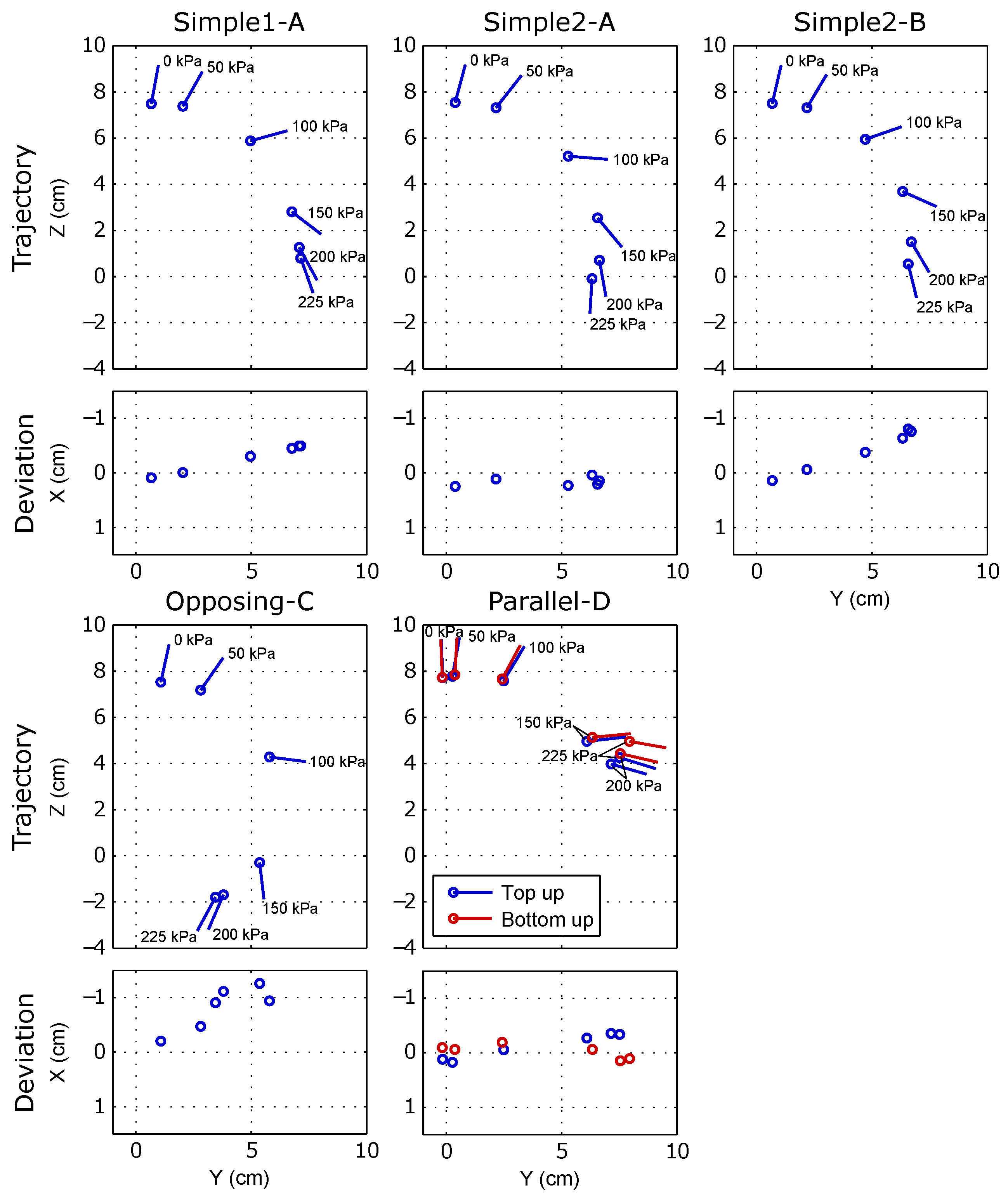
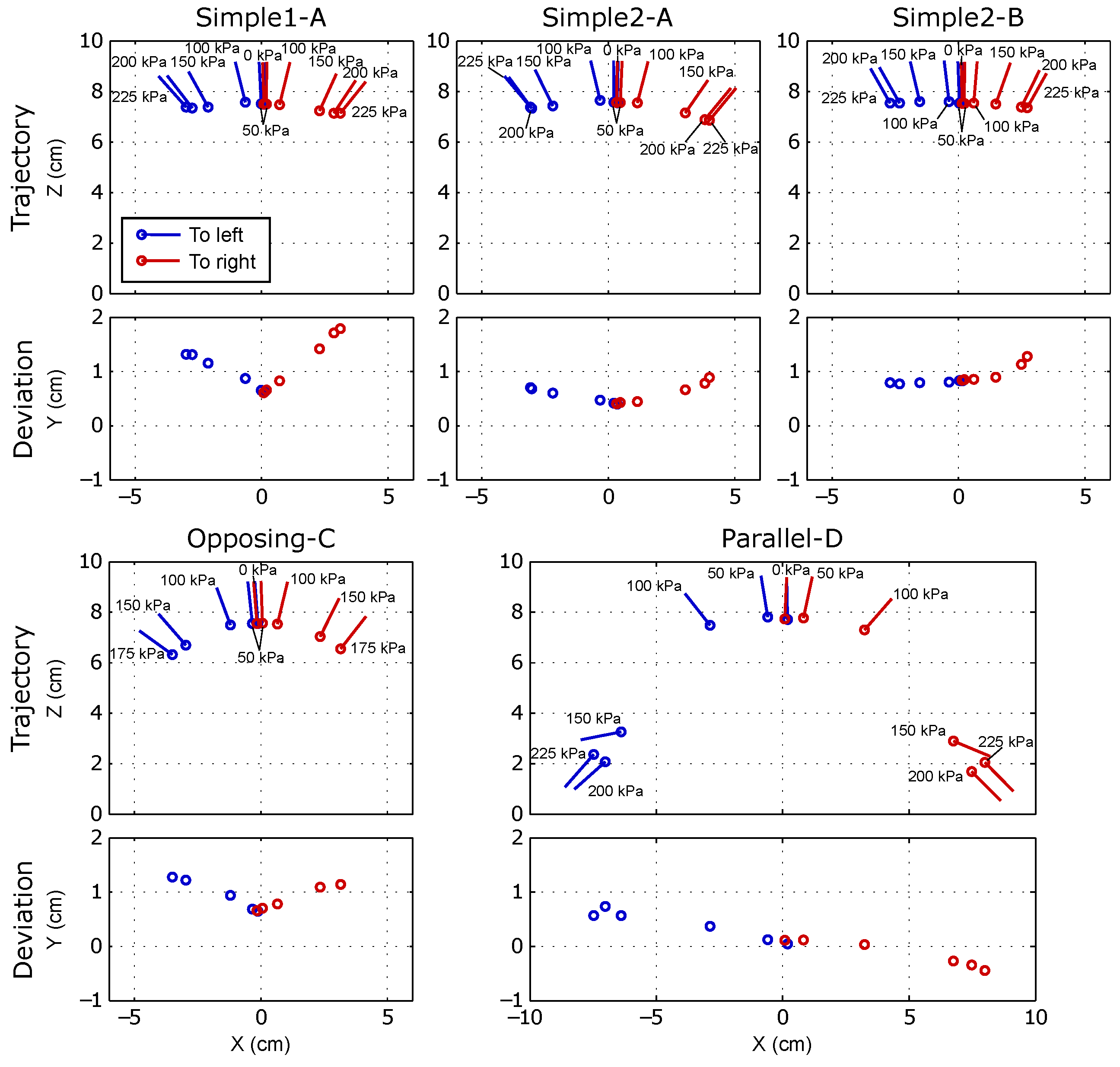
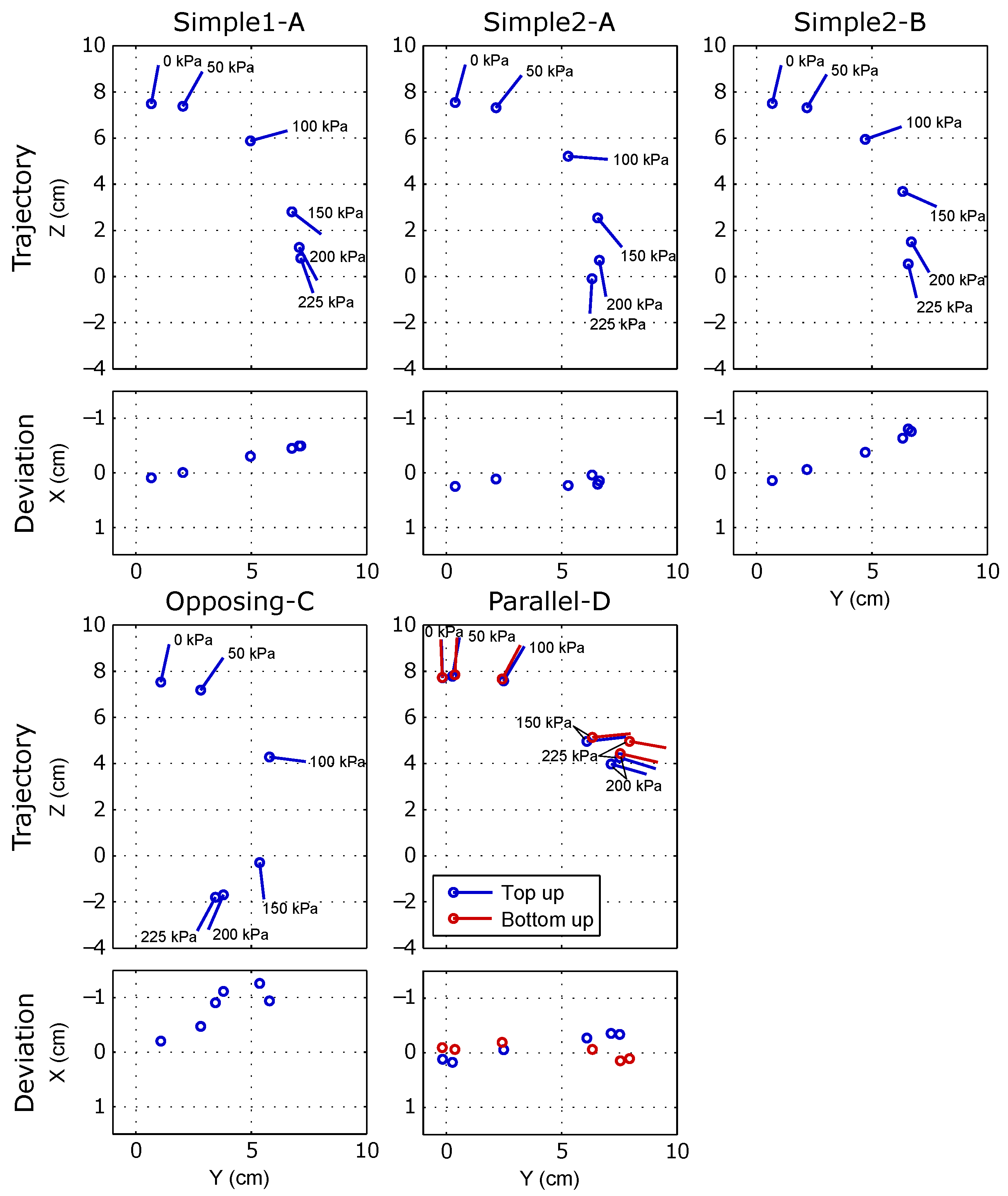
Figure 6.
Flexion trajectory results, showing the motion of the actuator tip vector formed by two markers. Only the Simple2-A and Parallel-D prototypes stayed in a relatively straight trajectory. The others tended to turn to the left. Lengthwise extension is visible as the tip marker’s deviation from a round trajectory. For Parallel-D, it is possible to see an end of the flexion motion, after which only lengthwise extension occurred.
Figure 6.
Flexion trajectory results, showing the motion of the actuator tip vector formed by two markers. Only the Simple2-A and Parallel-D prototypes stayed in a relatively straight trajectory. The others tended to turn to the left. Lengthwise extension is visible as the tip marker’s deviation from a round trajectory. For Parallel-D, it is possible to see an end of the flexion motion, after which only lengthwise extension occurred.
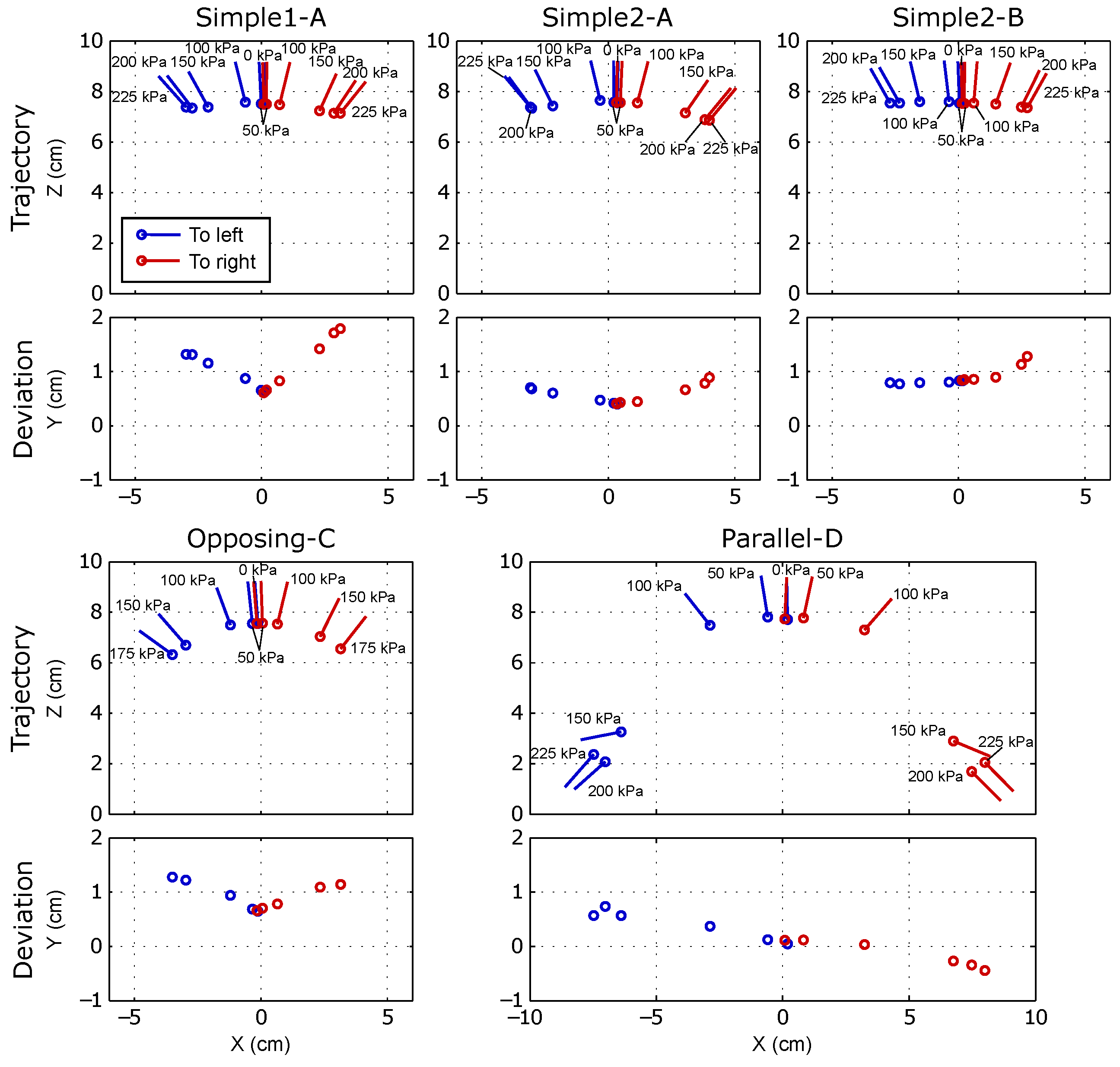
Figure 7.
Abduction-adduction trajectory results. Lengthwise extension can be seen as straight motion of the tip to the sides, instead of a round curve. Opposing-C had the roundest motion and least lengthwise extension, and it behaved most like a pivot joint. Parallel-D had a wider motion than the others due to its different structure and had the largest lengthwise extension. It is also possible to see the actuators’ nonlinear motion pattern, similar to the flexion measurements.
Figure 7.
Abduction-adduction trajectory results. Lengthwise extension can be seen as straight motion of the tip to the sides, instead of a round curve. Opposing-C had the roundest motion and least lengthwise extension, and it behaved most like a pivot joint. Parallel-D had a wider motion than the others due to its different structure and had the largest lengthwise extension. It is also possible to see the actuators’ nonlinear motion pattern, similar to the flexion measurements.
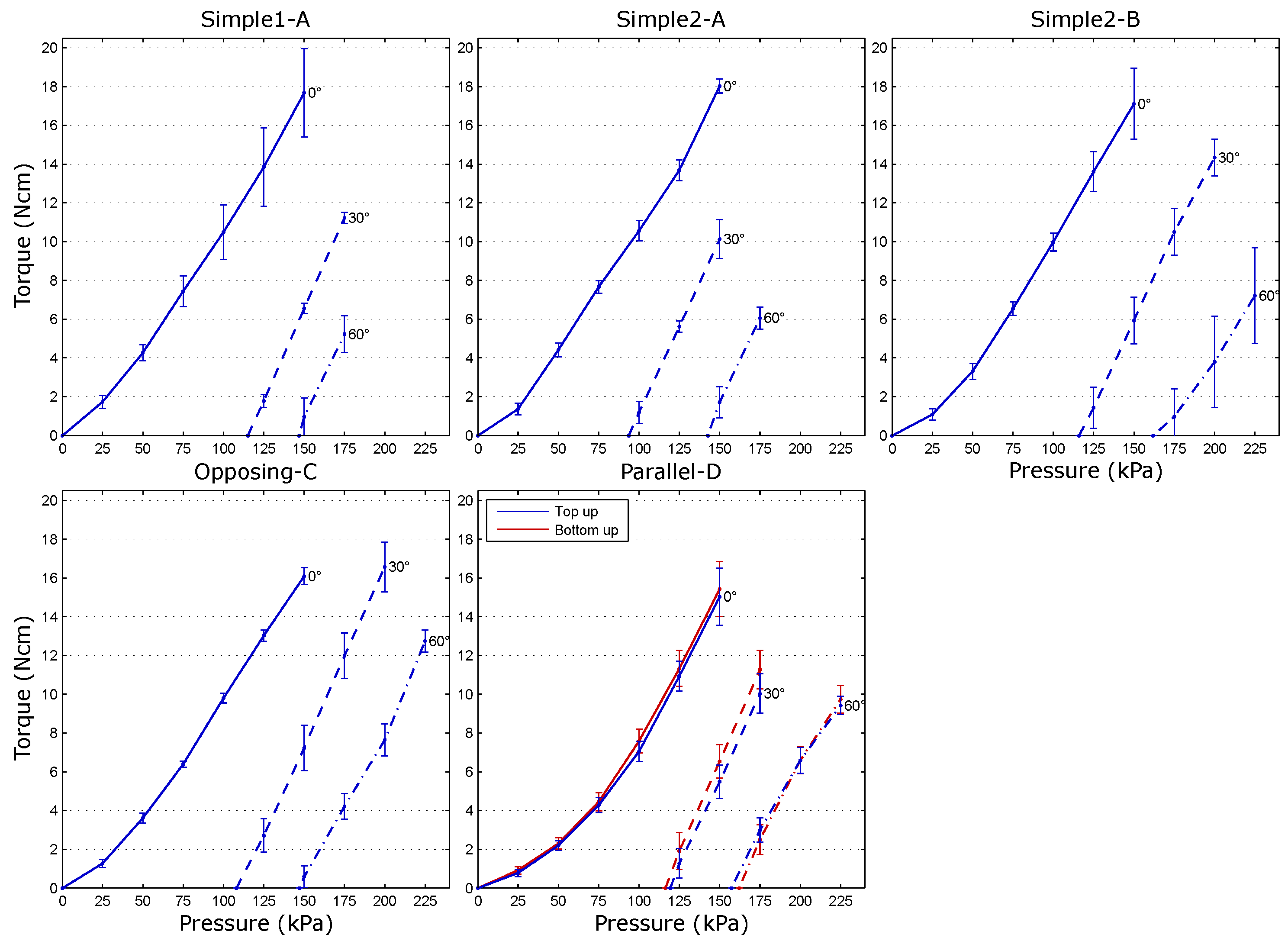
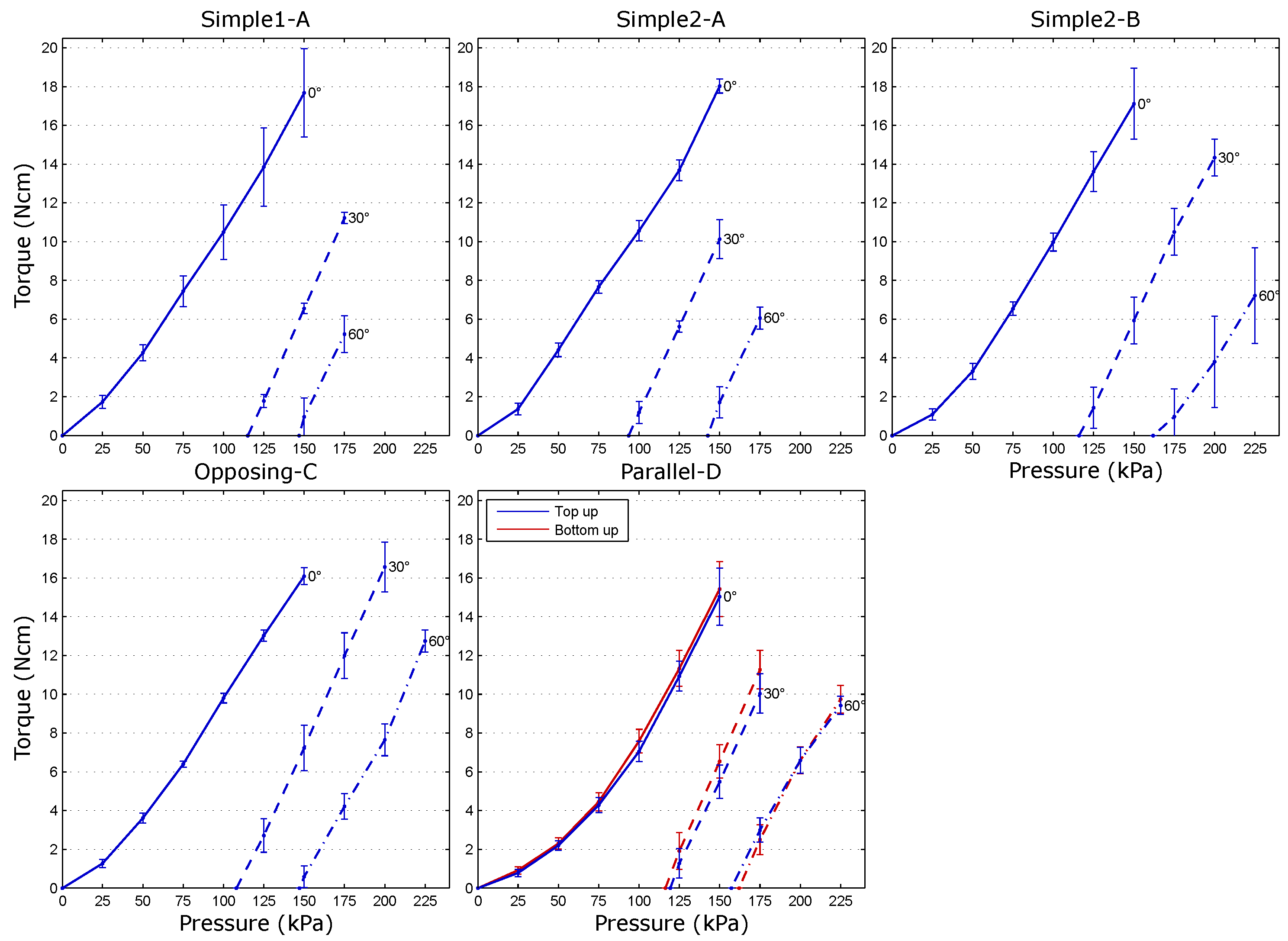
Figure 8.
Torque measurement results for flexion at 0, 30 and 60 flexion angles, with sample standard deviations. The maximum pressures for Simple1-A and Simple2-A were limited to avoid ballooning of silicone between the reinforcement helix on the back of the actuators.
Figure 8.
Torque measurement results for flexion at 0, 30 and 60 flexion angles, with sample standard deviations. The maximum pressures for Simple1-A and Simple2-A were limited to avoid ballooning of silicone between the reinforcement helix on the back of the actuators.
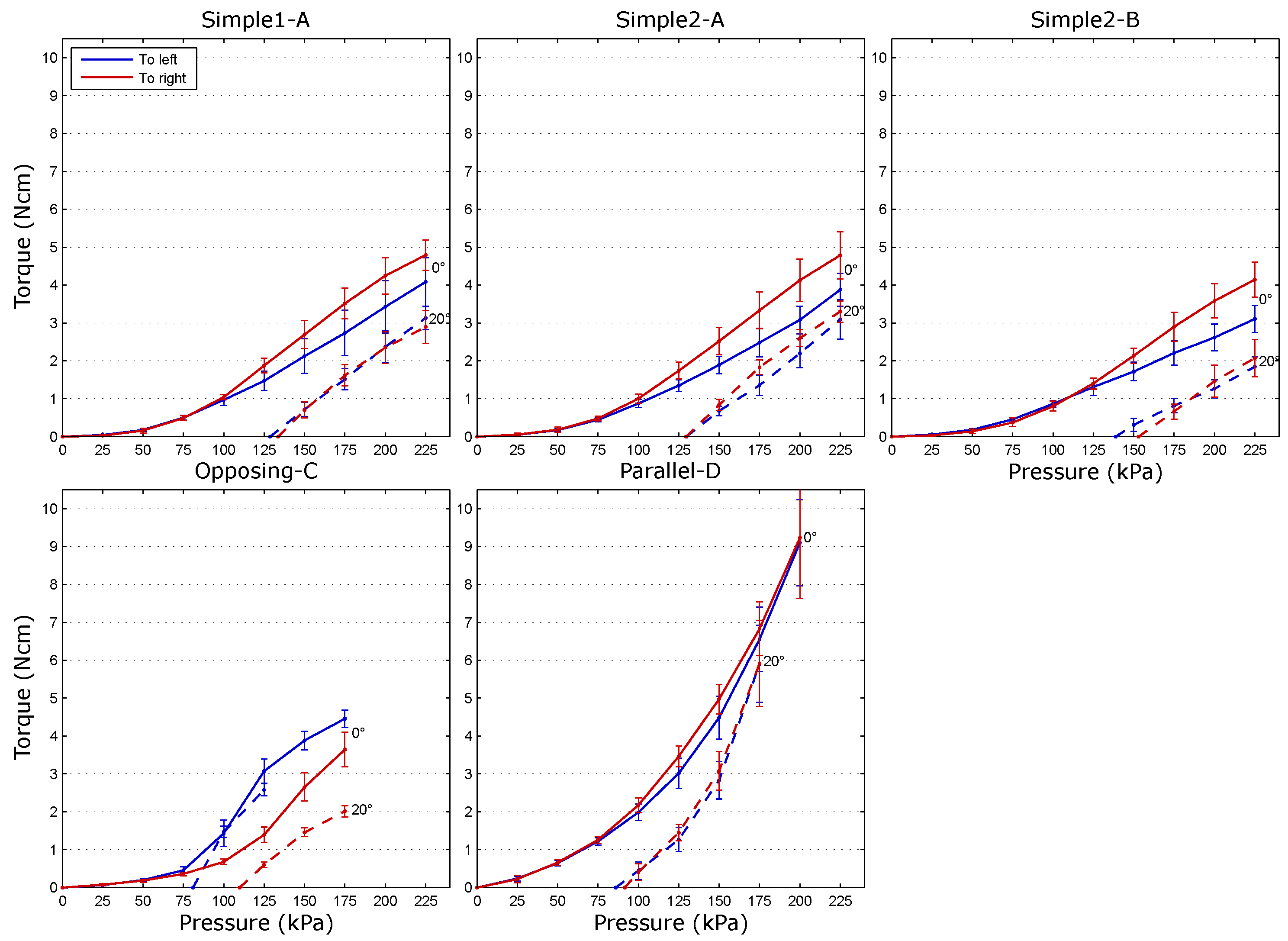
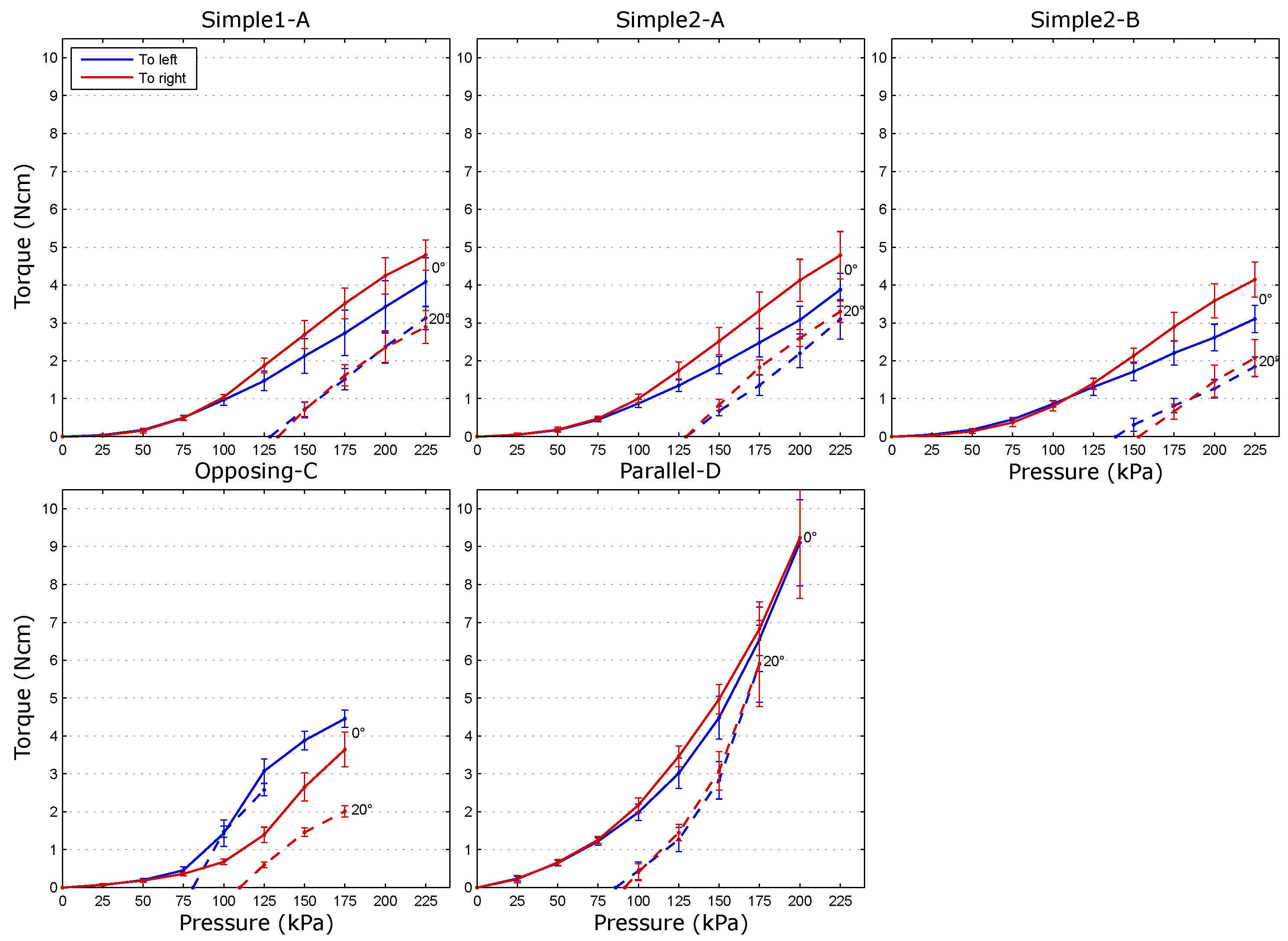
Figure 9.
Torque measurement results for abduction-adduction at 0 and 20 angles, with sample standard deviations. Maximum pressure for Opposing-C was limited to reduce the ballooning of the pockets and in the end, because of the right side pockets’ excessive ballooning. For Parallel-D, the limitation was due to the actuator starting to twist in unwanted directions, which can be seen also as a notable increase in the standard deviation.
Figure 9.
Torque measurement results for abduction-adduction at 0 and 20 angles, with sample standard deviations. Maximum pressure for Opposing-C was limited to reduce the ballooning of the pockets and in the end, because of the right side pockets’ excessive ballooning. For Parallel-D, the limitation was due to the actuator starting to twist in unwanted directions, which can be seen also as a notable increase in the standard deviation.
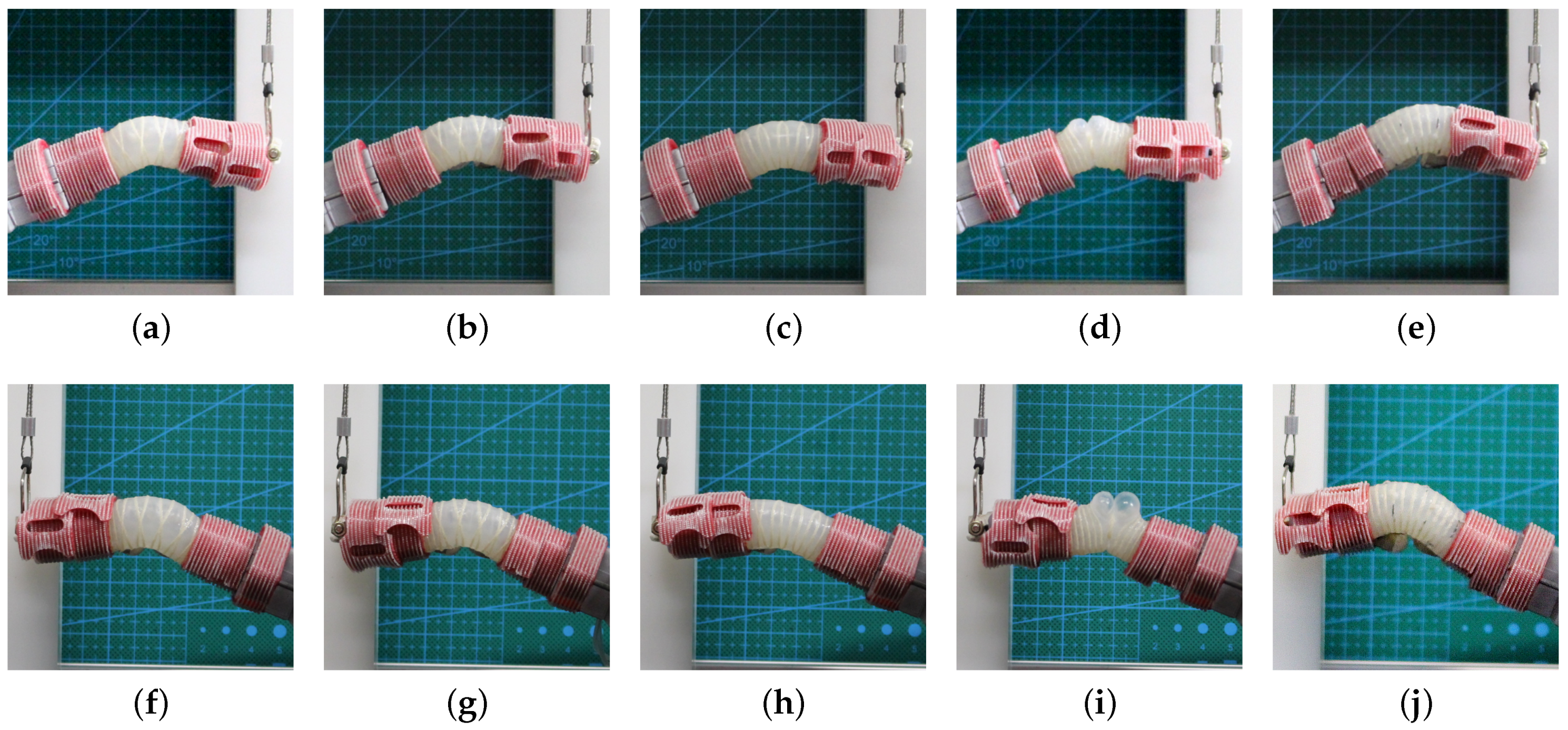
Figure 10.
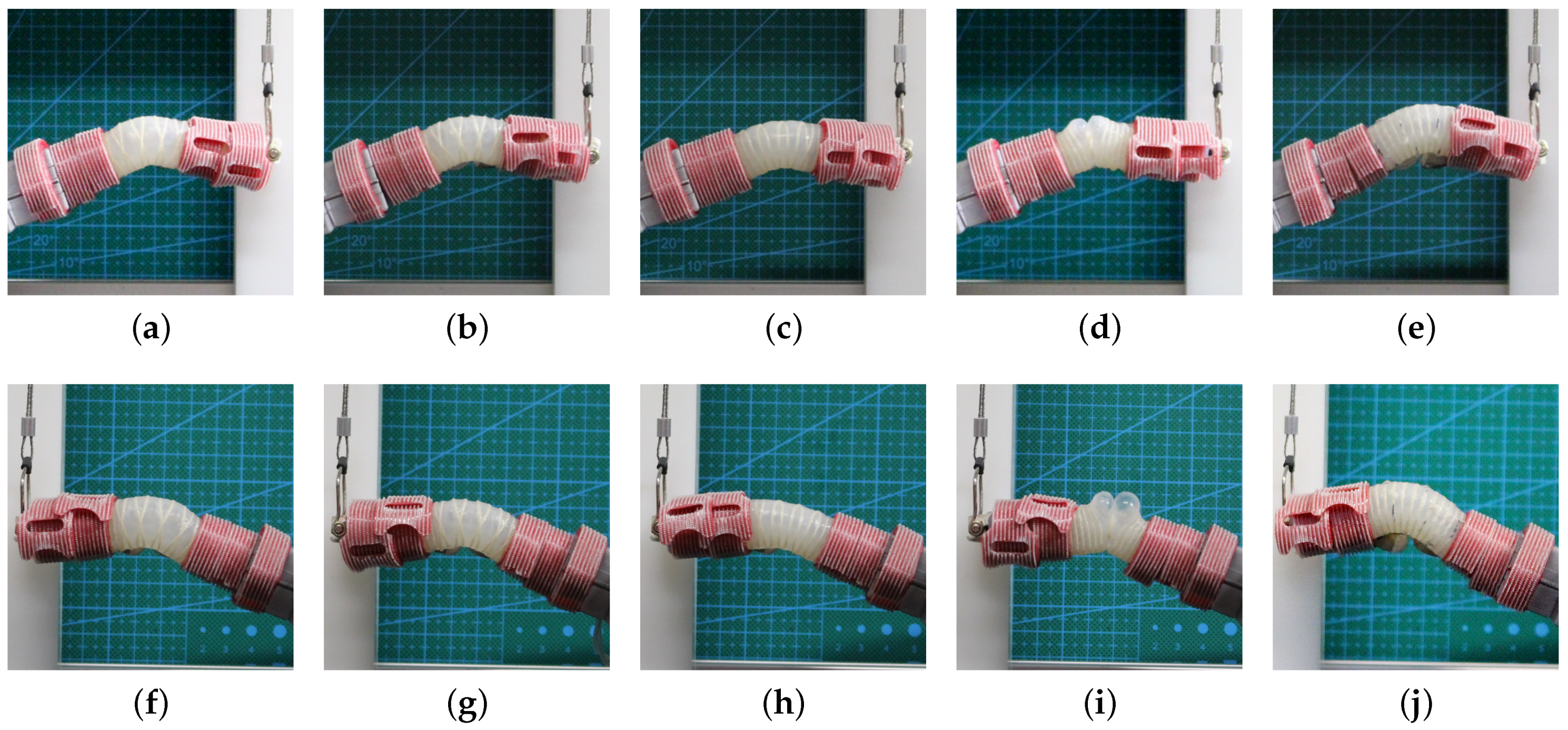
Prototype maximum deformation in 20 abduction-adduction torque measurement to the right (a–e) and to the left (f–j); (a,f) Simple1-A, 225 kPa; (b,g) Simple2-A, 225 kPa; (c,h) Simple2-B, 225 kPa; (d,i) Opposing-C, 175 kPa/125 kPa. Photos were taken at the end of the measurements, when the right side pockets’ ballooning had become excessive; (e,j) Parallel-D, 175 kPa.
Figure 10.
Prototype maximum deformation in 20 abduction-adduction torque measurement to the right (a–e) and to the left (f–j); (a,f) Simple1-A, 225 kPa; (b,g) Simple2-A, 225 kPa; (c,h) Simple2-B, 225 kPa; (d,i) Opposing-C, 175 kPa/125 kPa. Photos were taken at the end of the measurements, when the right side pockets’ ballooning had become excessive; (e,j) Parallel-D, 175 kPa.
Table 1.
Maximum actuator tip angles for flexion trajectory measurements.
Table 1.
Maximum actuator tip angles for flexion trajectory measurements.
| | Simple1-A | Simple2-A | Simple2-B | Opposing-C | Parallel-D |
|---|
| | Top Up/Bottom Up |
|---|
| Flexion RoM | 160 | 184 | 166 | 208 | /103 |
Table 2.
Maximum actuator tip angles for abduction-adduction trajectory measurements.
Table 2.
Maximum actuator tip angles for abduction-adduction trajectory measurements.
| | Simple1-A | Simple2-A | Simple2-B | Opposing-C | Parallel-D |
|---|
| Abd-Add RoM to left | 42 | 40 | 30 | 54 | 139 |
| Abd-Add RoM to right | 39 | 40 | 30 | 38 | 135 |
Table 3.
Maximum average joint torques for flexion.
Table 3.
Maximum average joint torques for flexion.
| | Simple1-A | Simple2-A | Simple2-B | Opposing-C | Parallel-D | |
|---|
| | Top Up/Bottom Up | |
|---|
| Flexion 0 | 17.68 | 18.04 | 17.12 | 16.10 | 15.03/15.43 | (Ncm) |
| Flexion 30 | 11.23 | 10.13 | 14.34 | 16.57 | 10.04/11.26 | (Ncm) |
| Flexion 60 | 5.23 | 6.06 | 7.22 | 7.64 | 9.42/9.75 | (Ncm) |
Table 4.
Maximum average joint torques for abduction-adduction.
Table 4.
Maximum average joint torques for abduction-adduction.
| | Simple1-A | Simple2-A | Simple2-B | Opposing-C | Parallel-D | |
|---|
| | Left/Right | Left/Right | Left/Right | Left/Right | Left/Right | |
|---|
| Abd-Add 0 | 4.08/4.79 | 3.87/4.79 | 3.11/4.14 | 4.46/3.64 | 9.10/9.23 | (Ncm) |
| Abd-Add 20 | 3.13/2.89 | 3.09/3.30 | 1.85/2.07 | 2.58/2.01 | 5.90/5.91 | (Ncm) |
Table 5.
Comparison of tested prototypes; advantages and disadvantages of each approach and relative level of coupling between the two functions.
Table 5.
Comparison of tested prototypes; advantages and disadvantages of each approach and relative level of coupling between the two functions.
| Prototype | Advantages | Disadvantages | Coupling between Functions |
|---|
| Simple1-A | N/A | Gaps in reinforcements cause ballooning; wide radial expansion | High |
| Simple2-A | Strong structure; limited radial expansion | Gaps in reinforcements cause ballooning | Medium |
| Simple2-B | N/A | Reinforcement alignment weakens output and causes deviation to left in flexion | High |
| Opposing-C | Pivot-like sideways response; strong flexion | Excessive ballooning of side-pockets; sideways flexibility; asymmetric response | High |
| Parallel-D | 360 control; potential to adapt to thumb support | Excessive length extension | Low |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}