
Review of Electromagnetic-Based Crack Sensors for Metallic Materials (Recent Research and Future Perspectives)



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- The probe need not be in contact with the surface under examination.
- The methods are applicable in high-temperature environments.
- Cracks may be filled with dielectric materials, such as dirt, paint or rust.
- The surface of the metal may be covered with paint or a similar compound, and the crack may still be detected because microwaves penetrate dielectric materials.
- The methods are applicable to both non-ferromagnetic and ferromagnetic metals or alloys and coarse-grained materials, because microwaves do not penetrate metal and depend on perturbations in the surface current.
- The dimensions of a crack can be accurately estimated.
- The polarization properties of microwaves can provide information regarding relative crack orientation.
- Crack tip location can be determined.
2. Background
3. Band-Pass Filters Based on DBRs
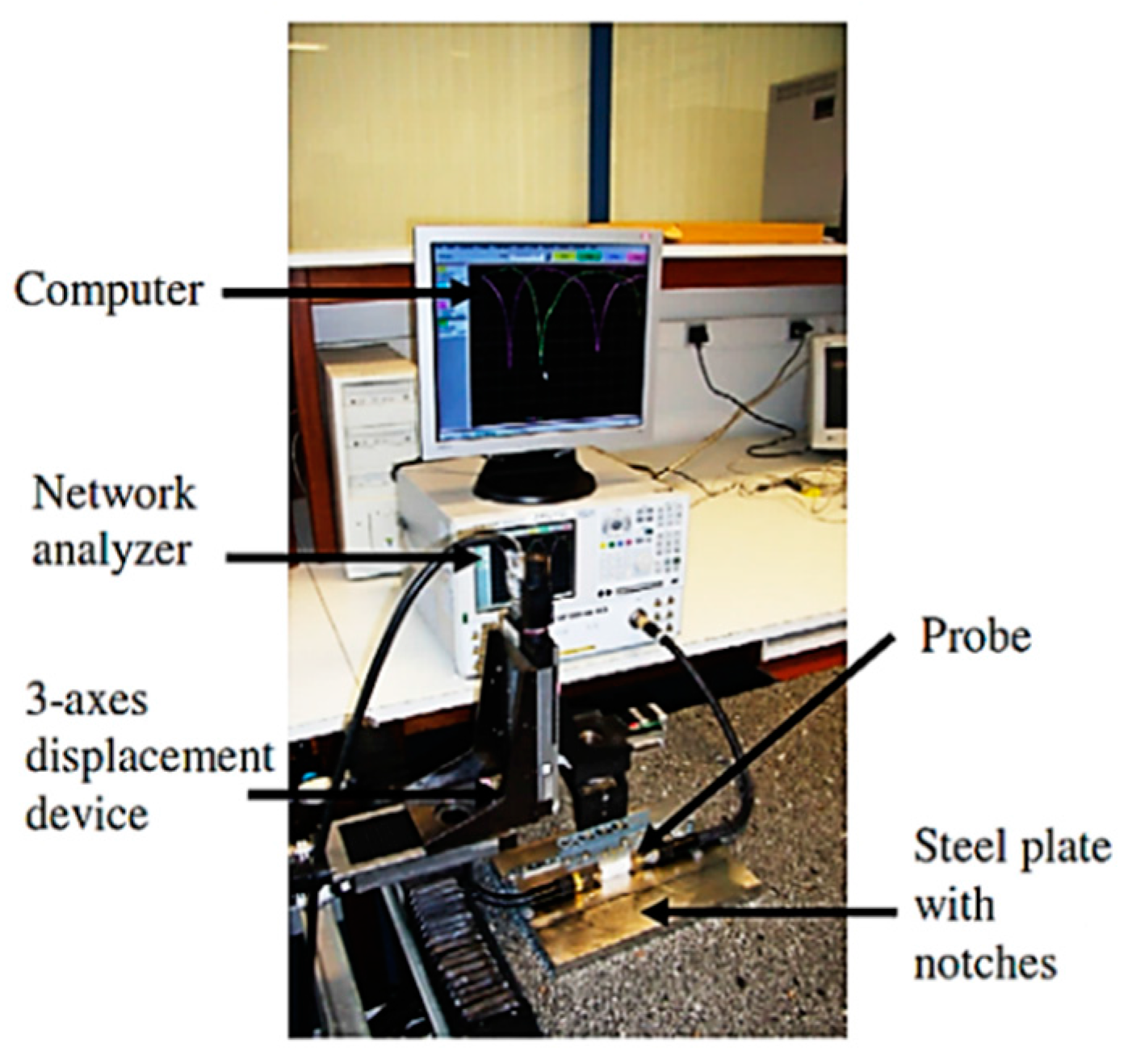
3.1. Feasibility and Relevance of Crack Detection Using an Available Microwave-Based Technique
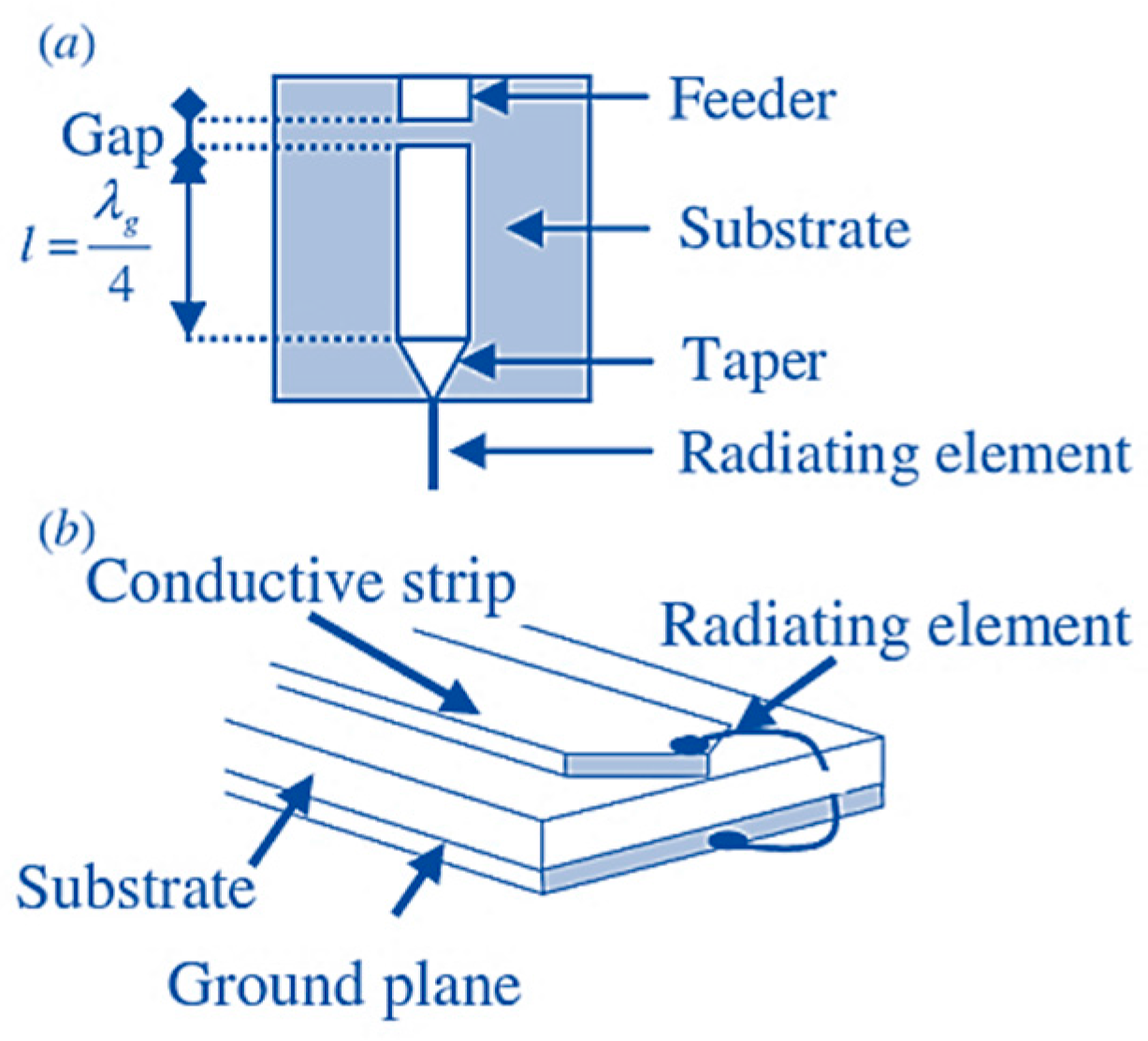
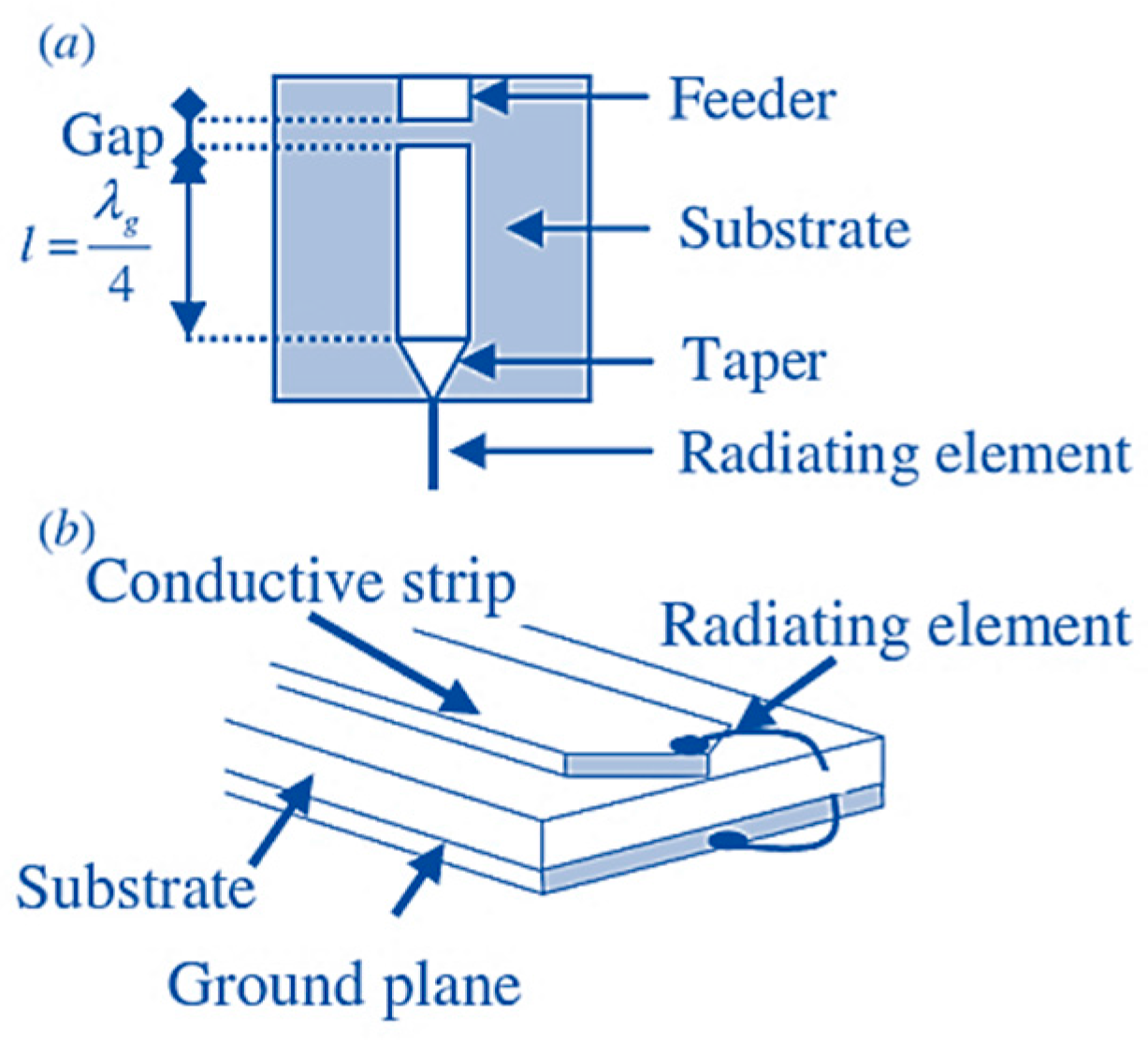
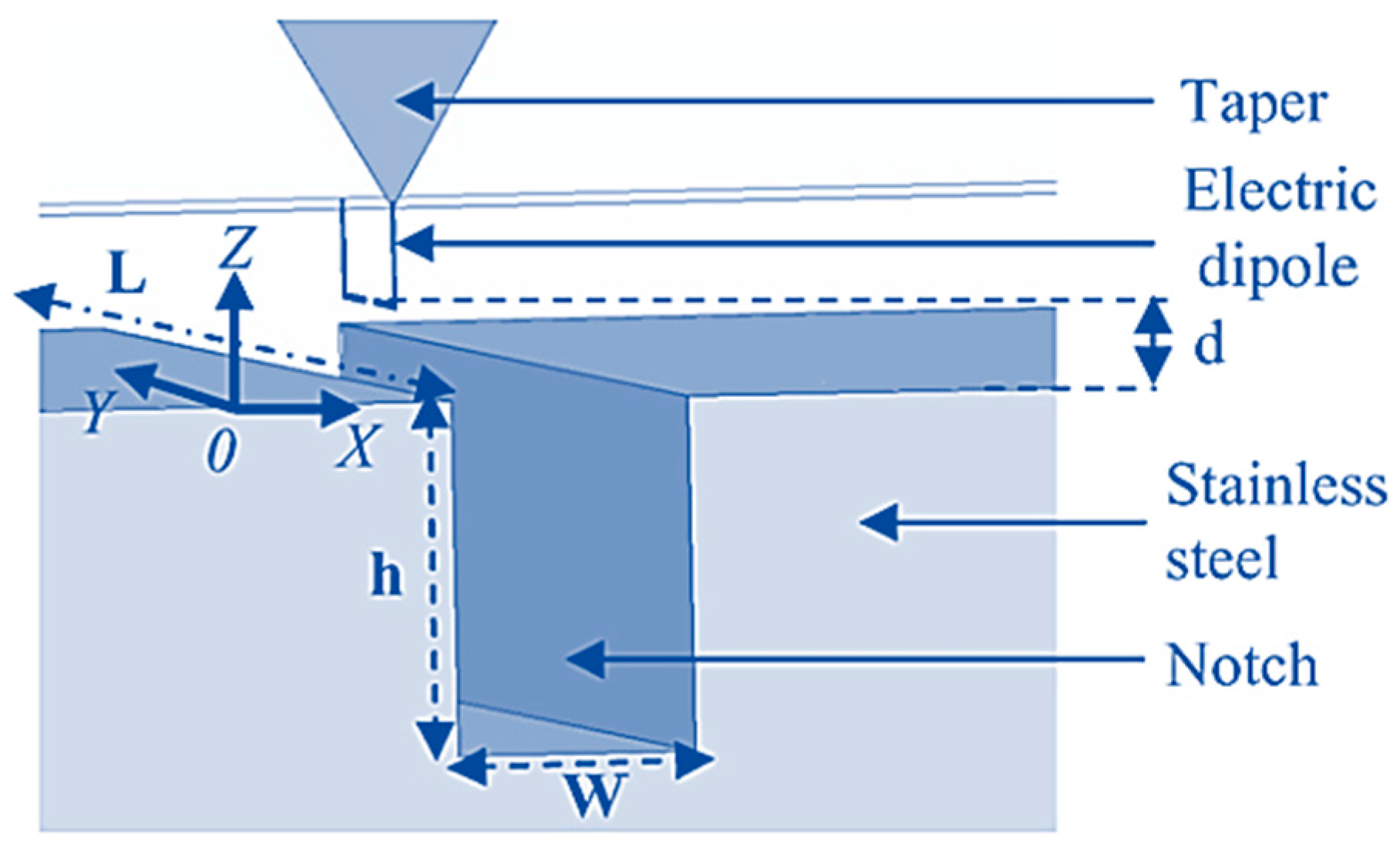
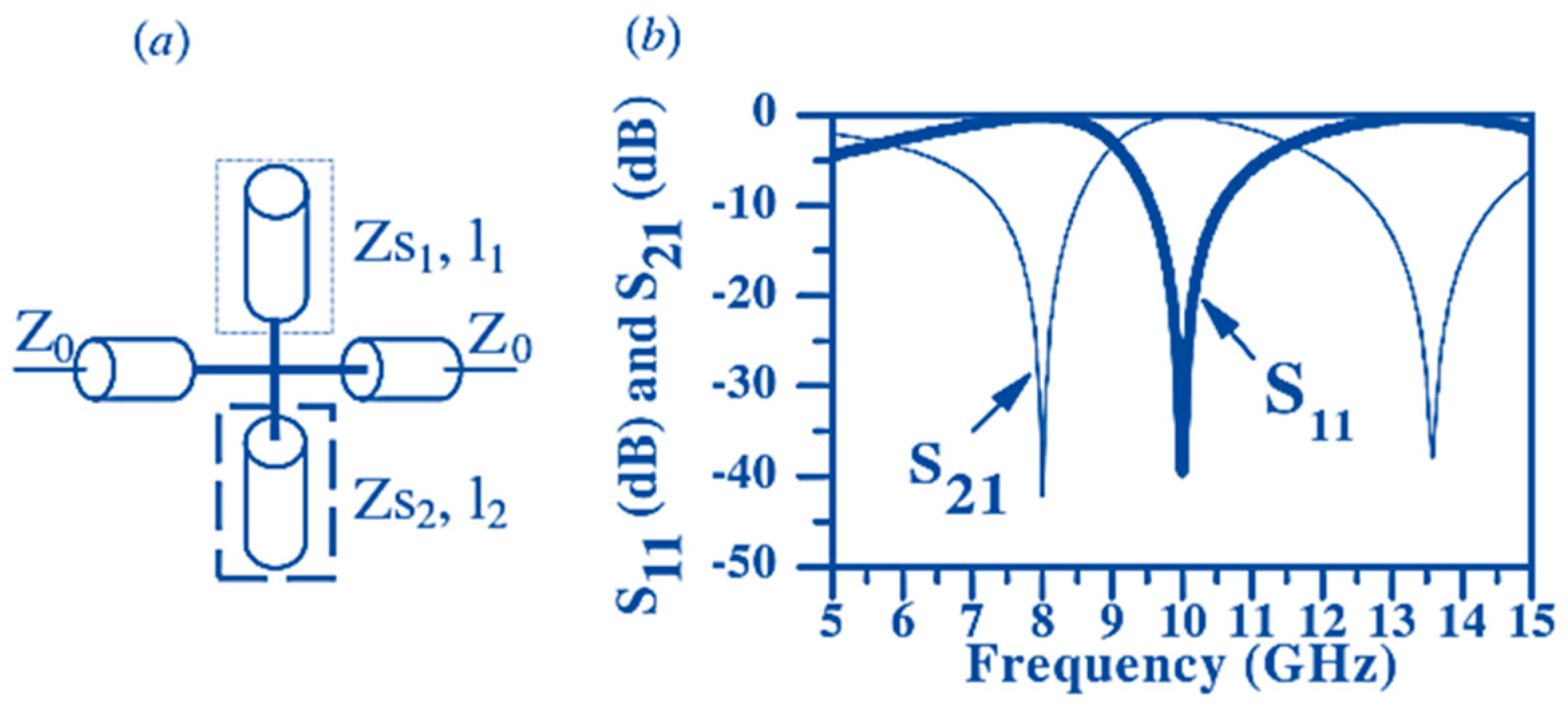
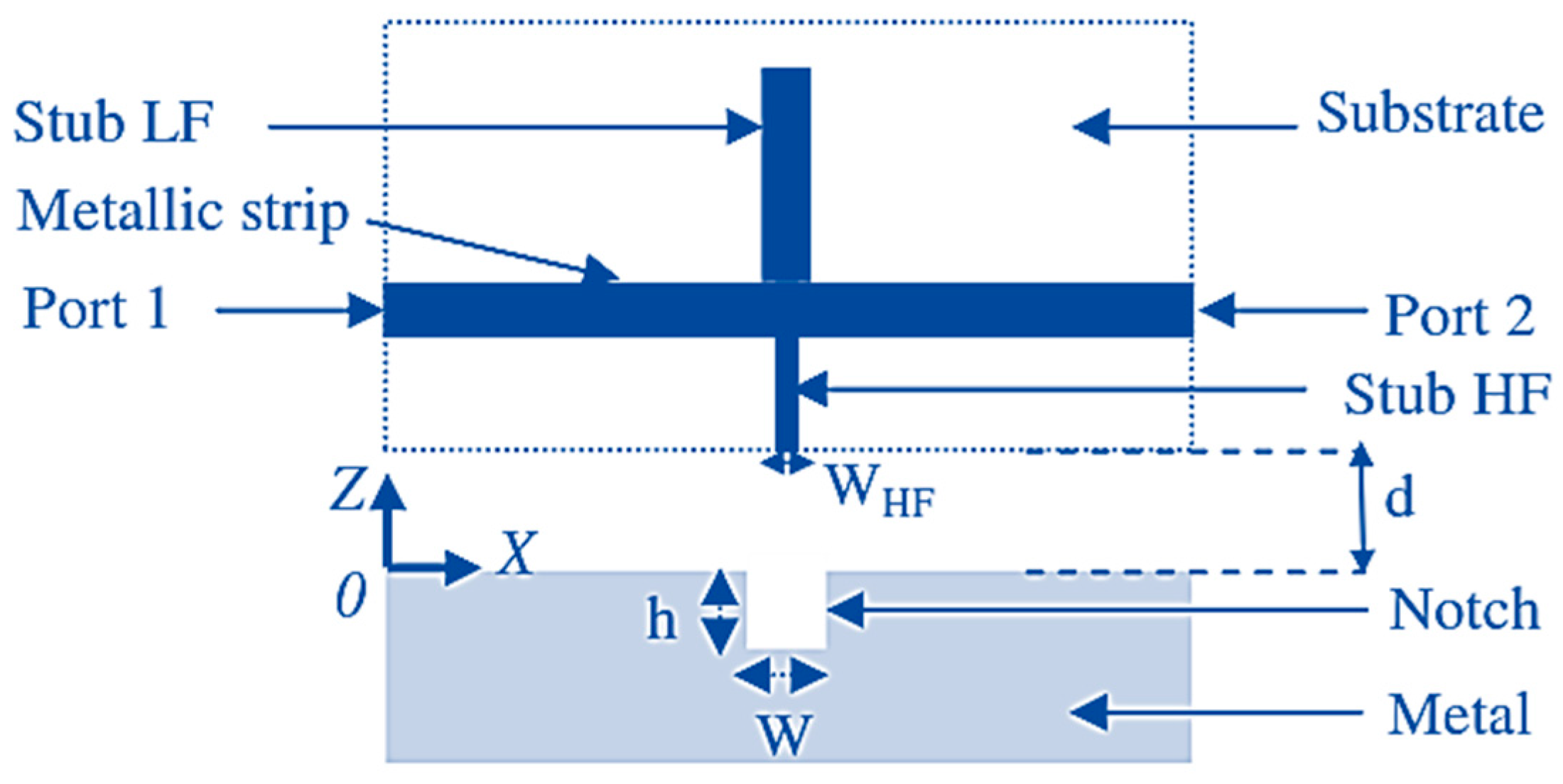
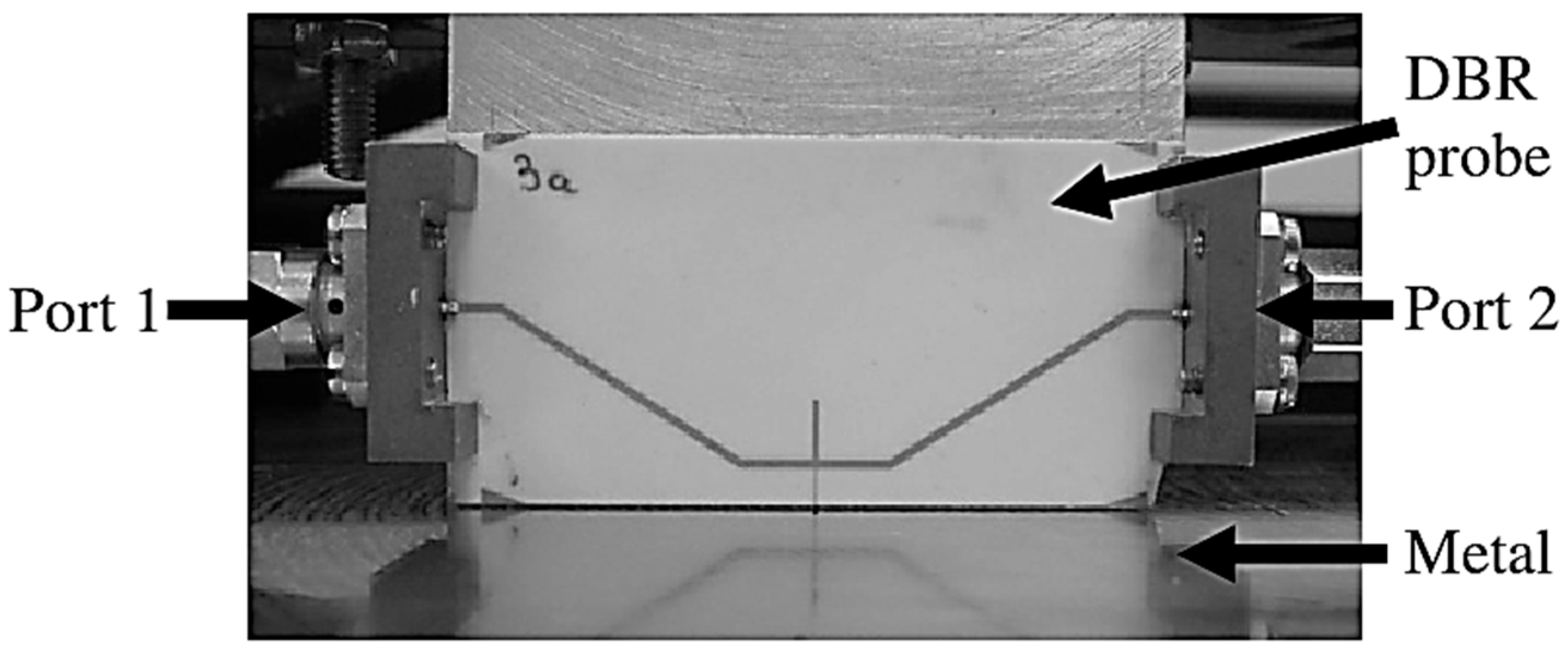
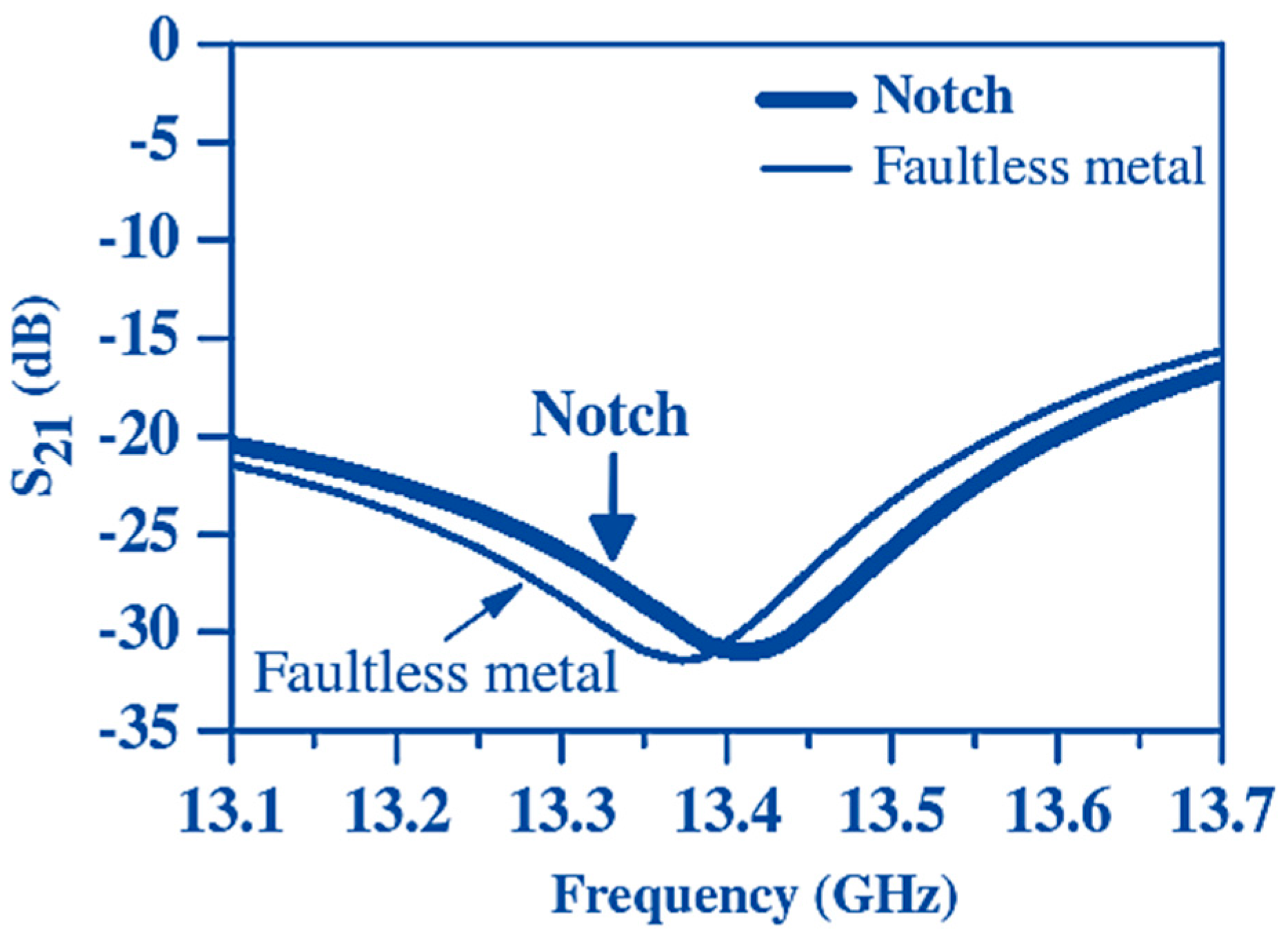
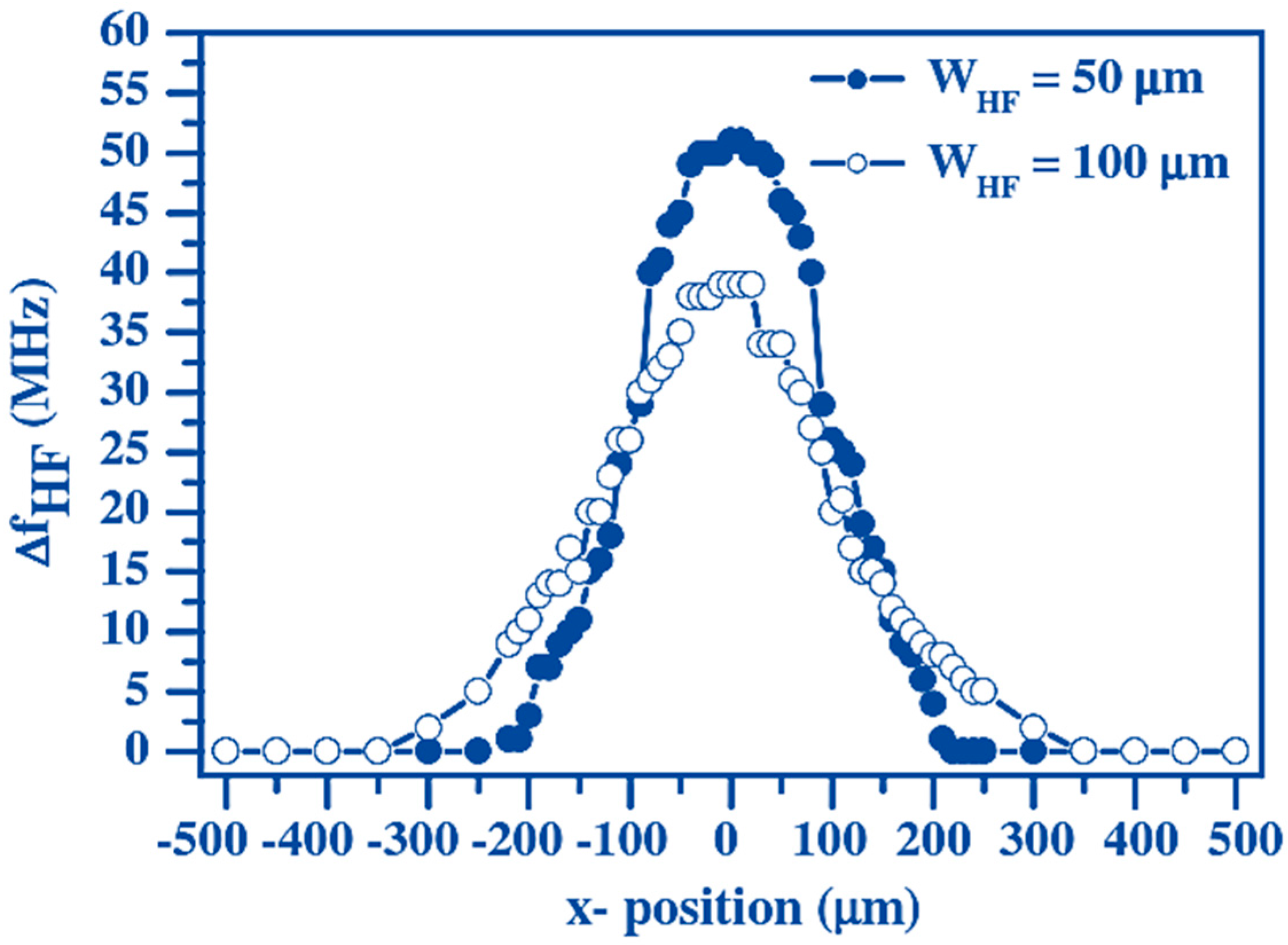
3.2. DBR Filter Probe
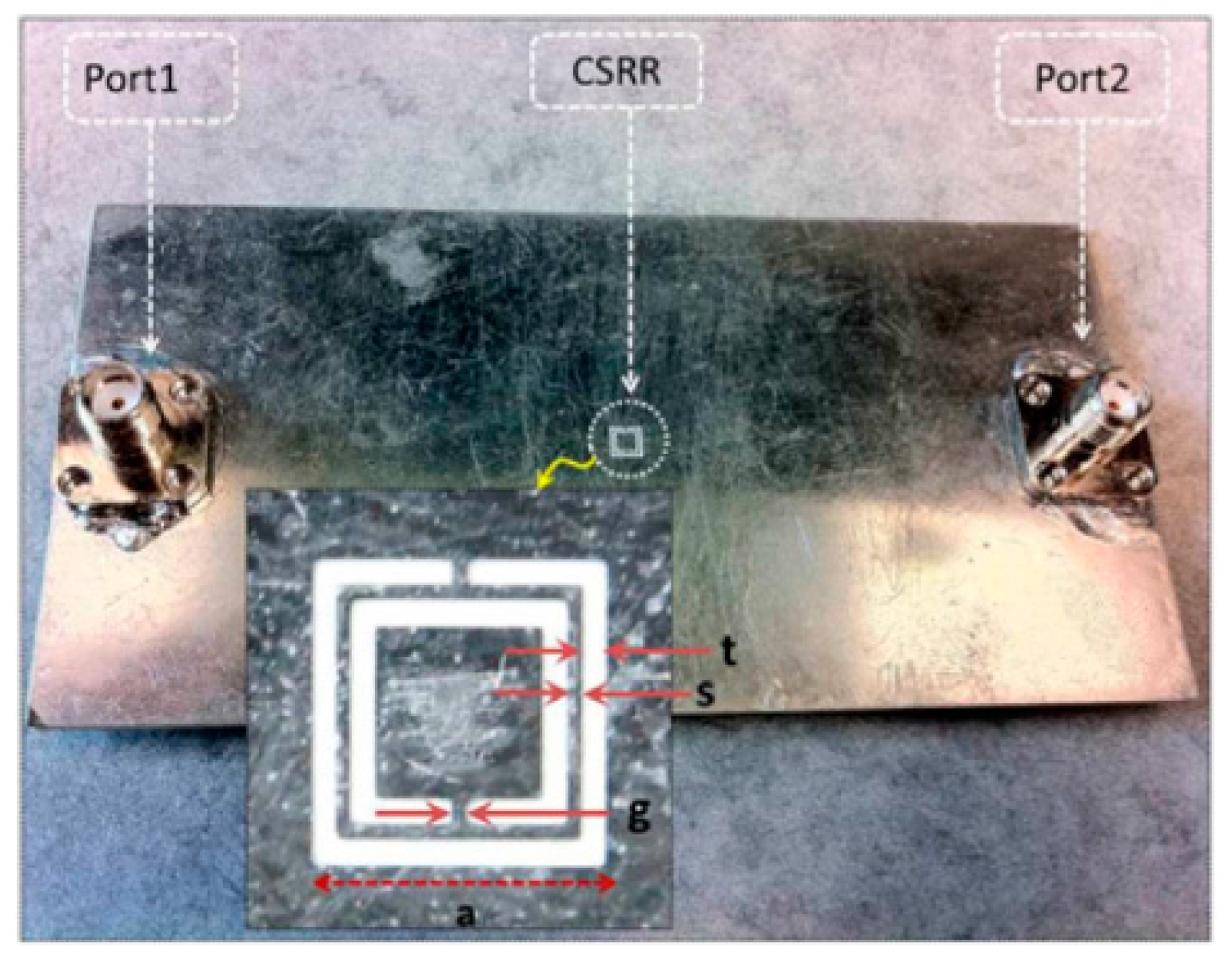
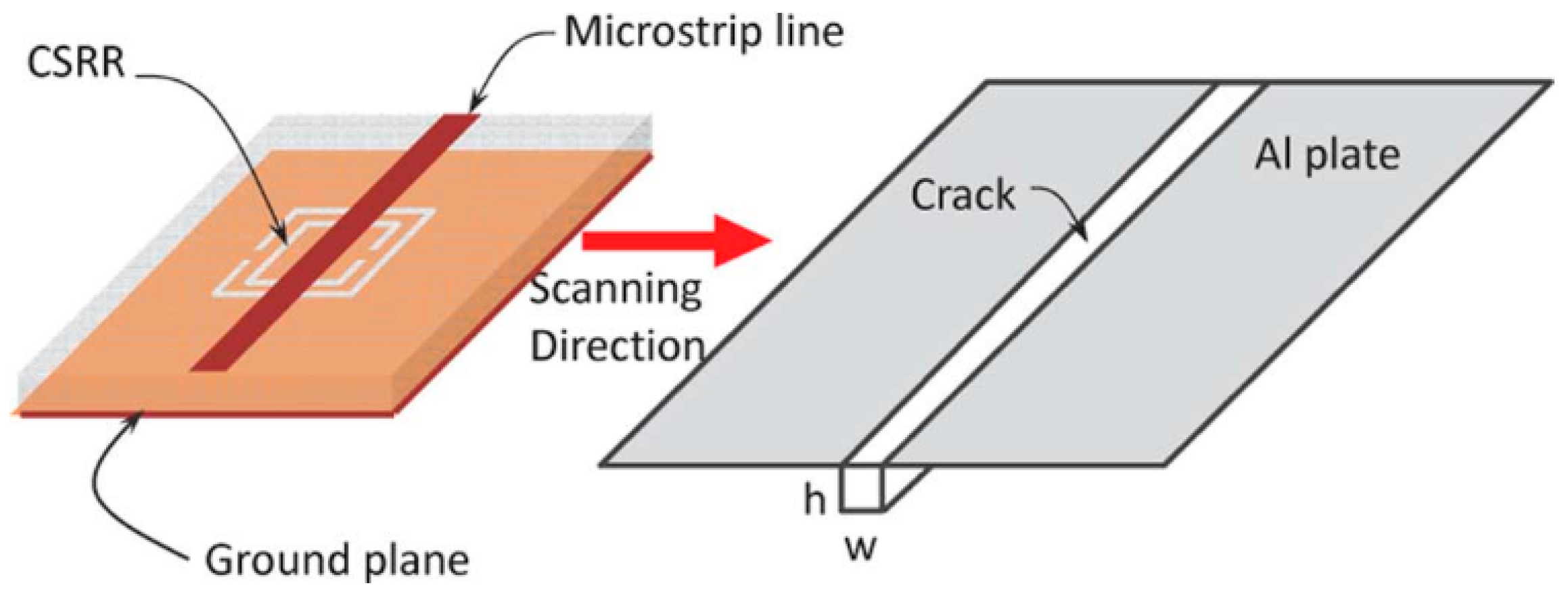
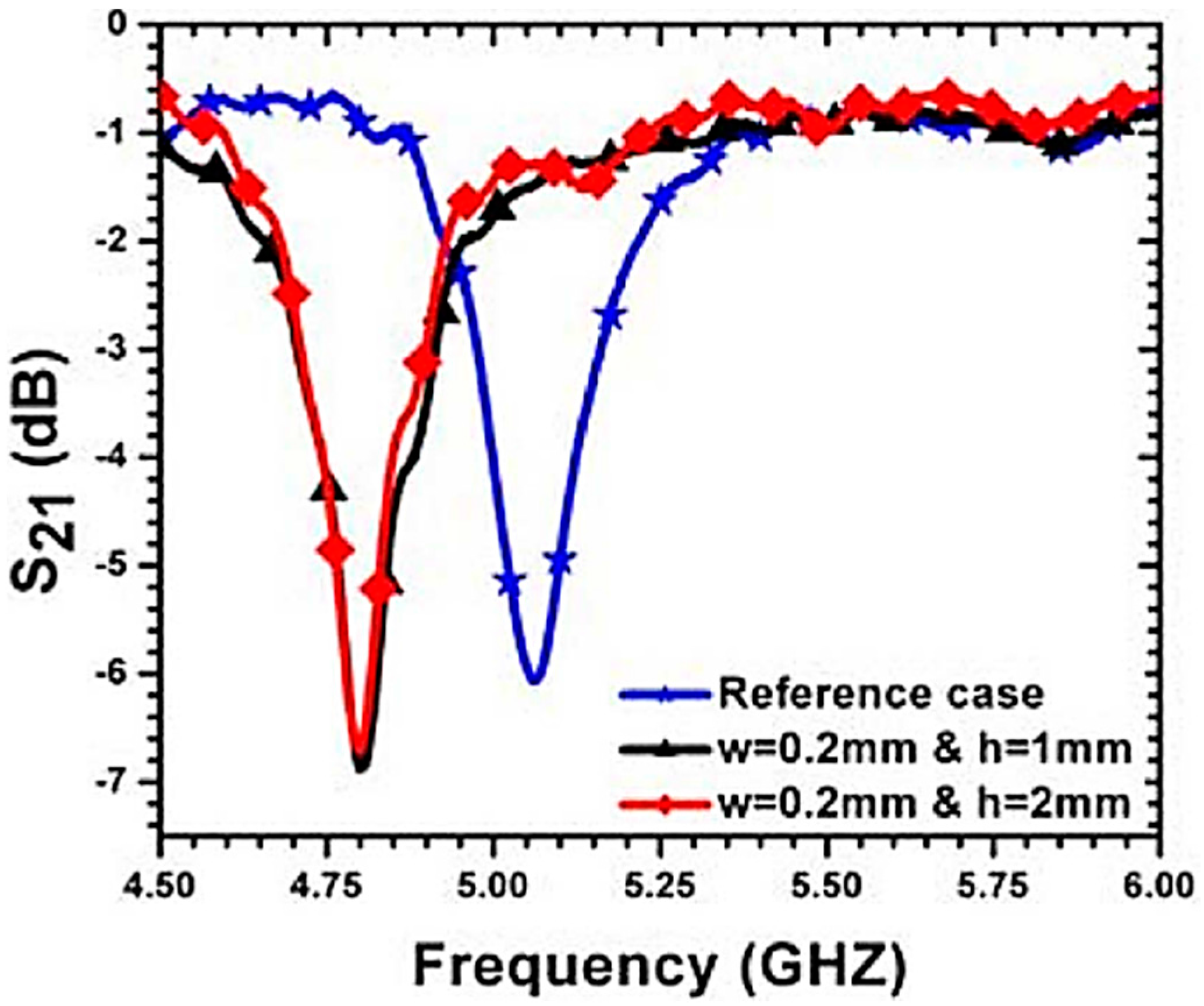
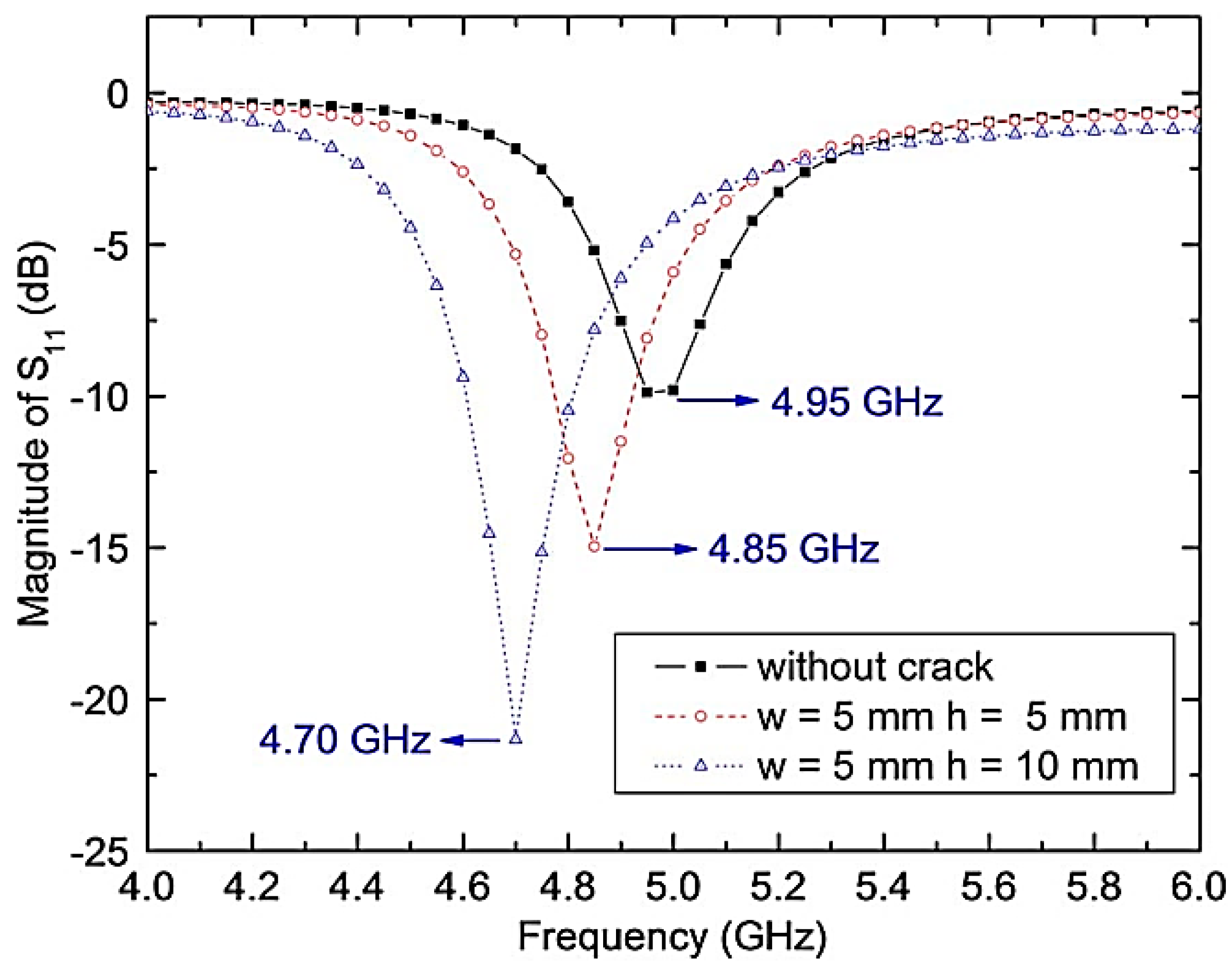
4. CSRR for Crack Detection in Metallic Surfaces
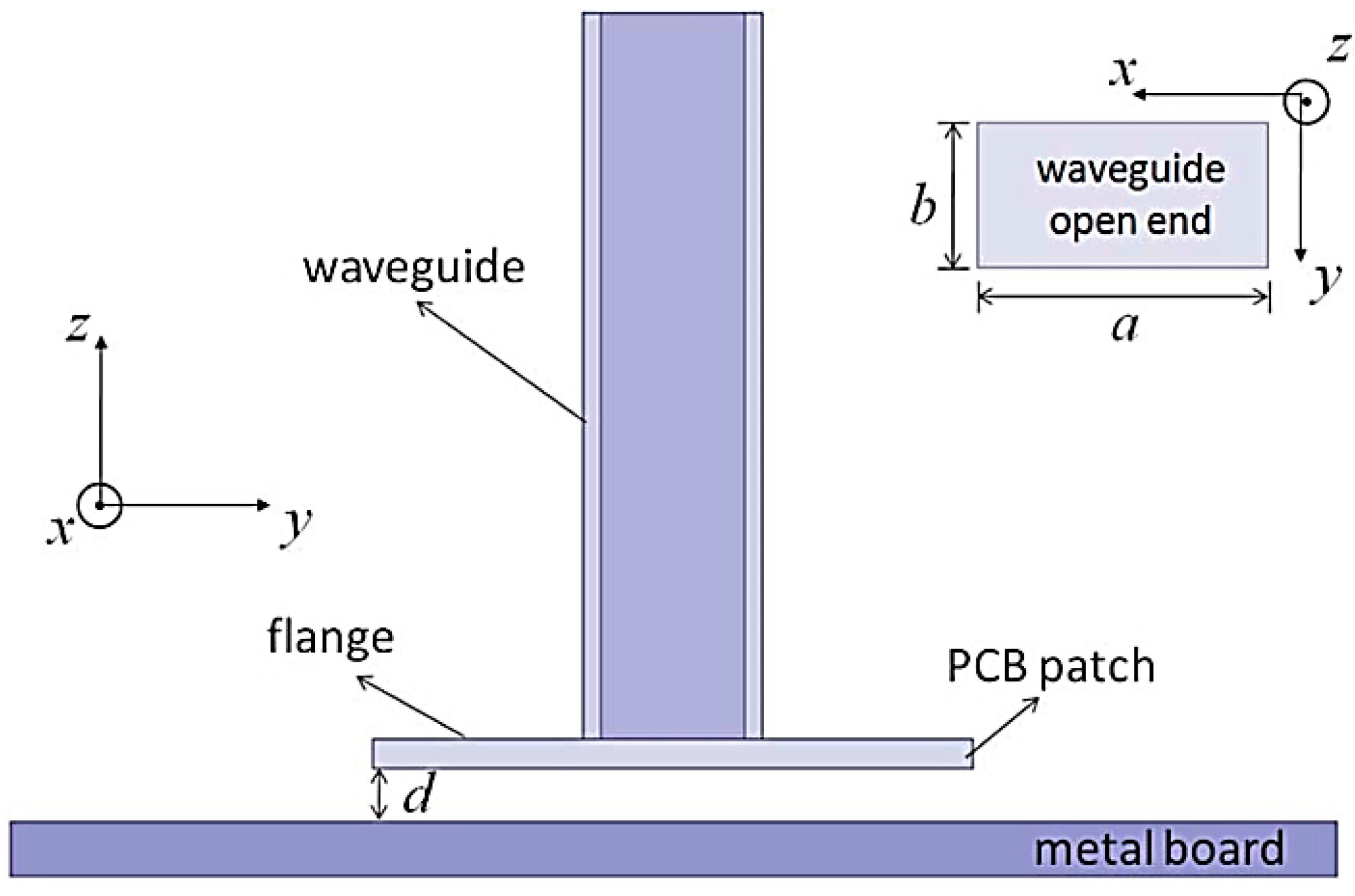
5. Waveguide Probe Using Split-Ring Resonators for Crack Detection in Metallic Surfaces
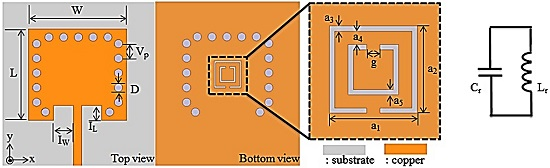
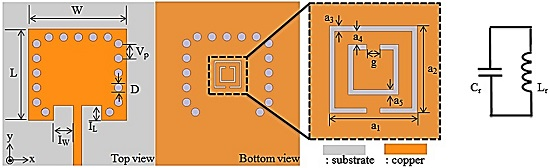
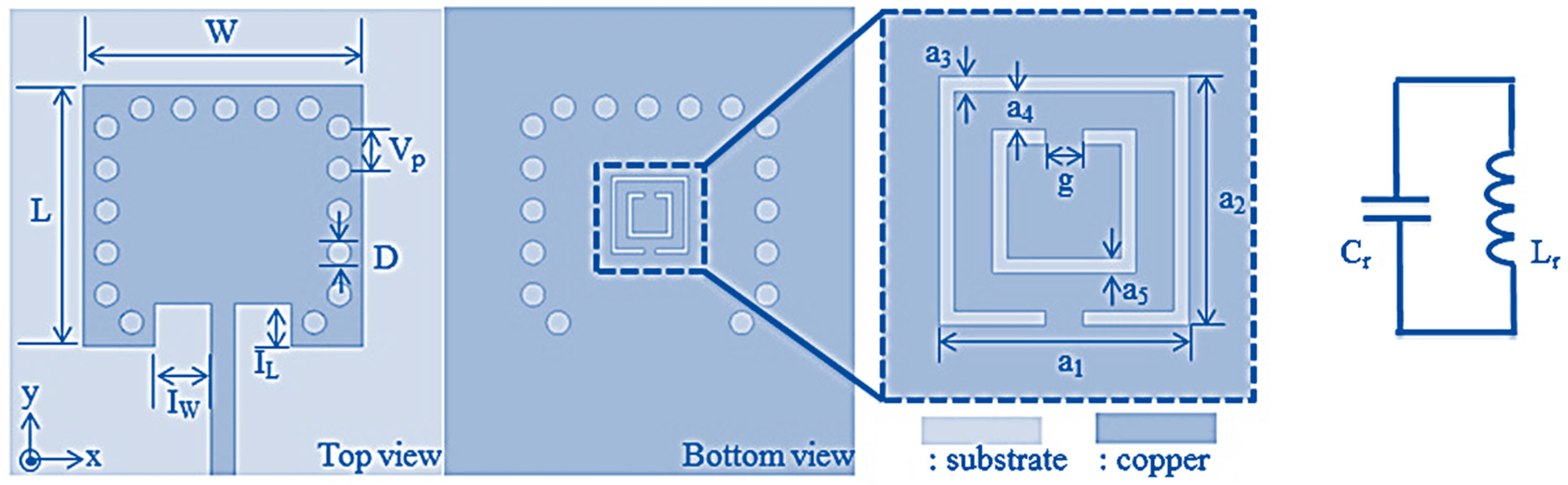
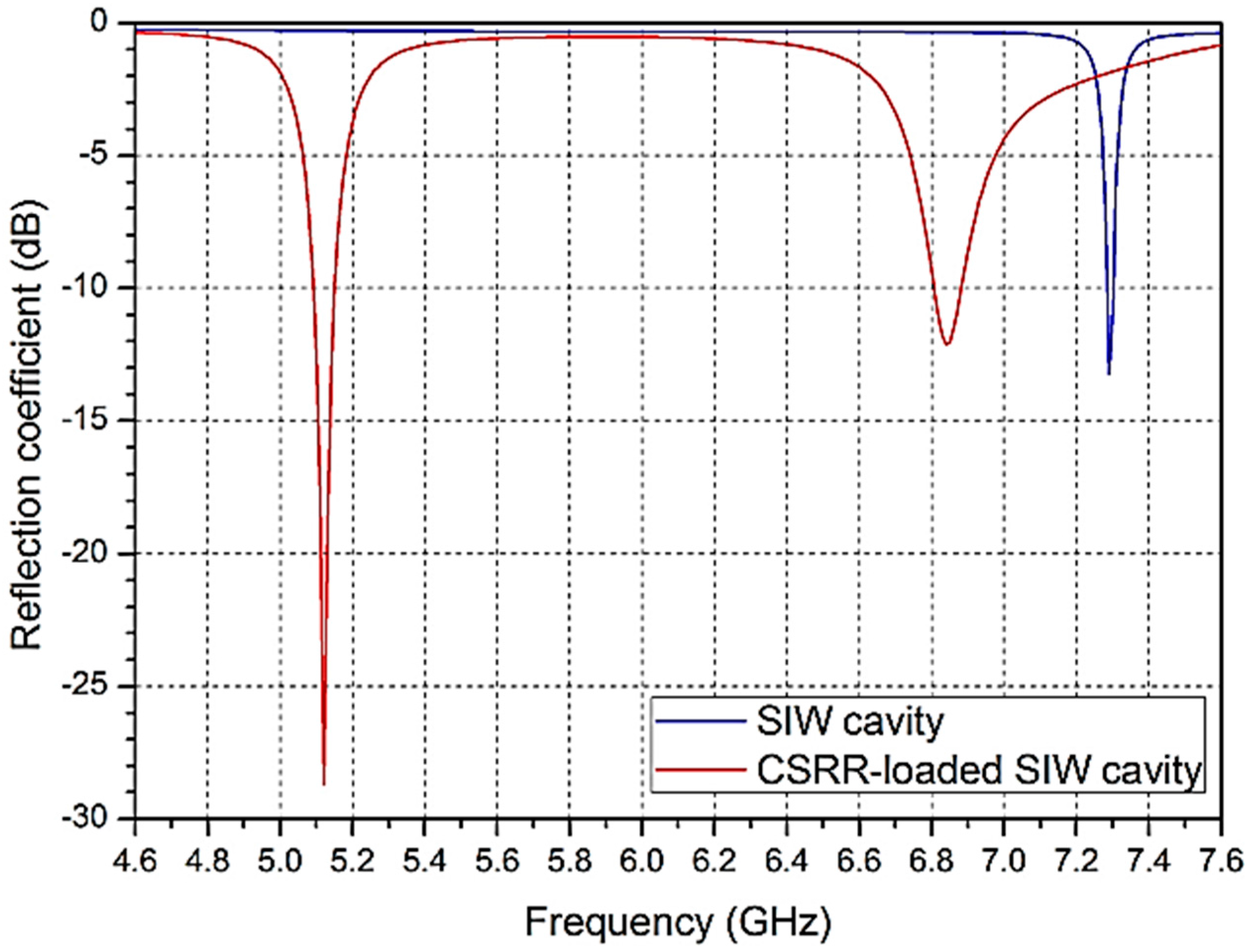
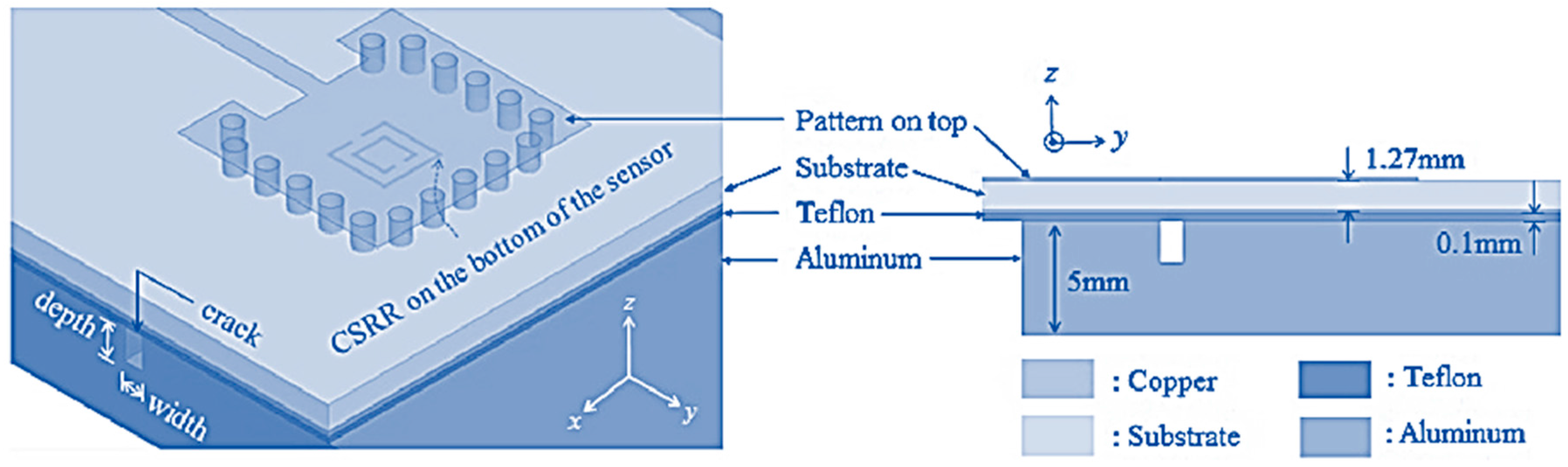
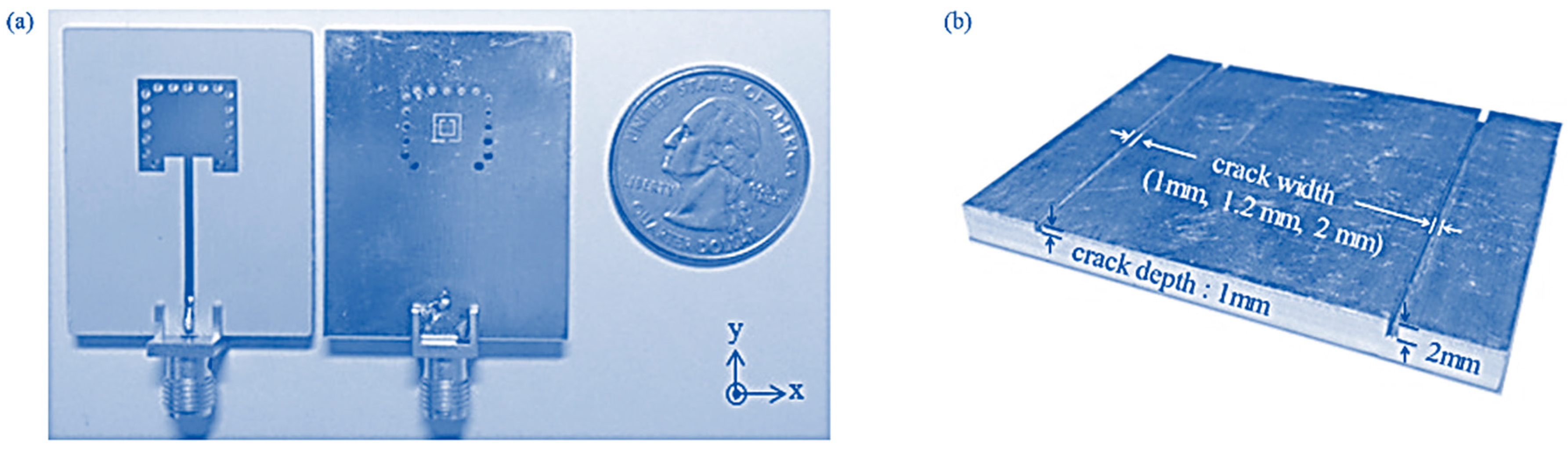
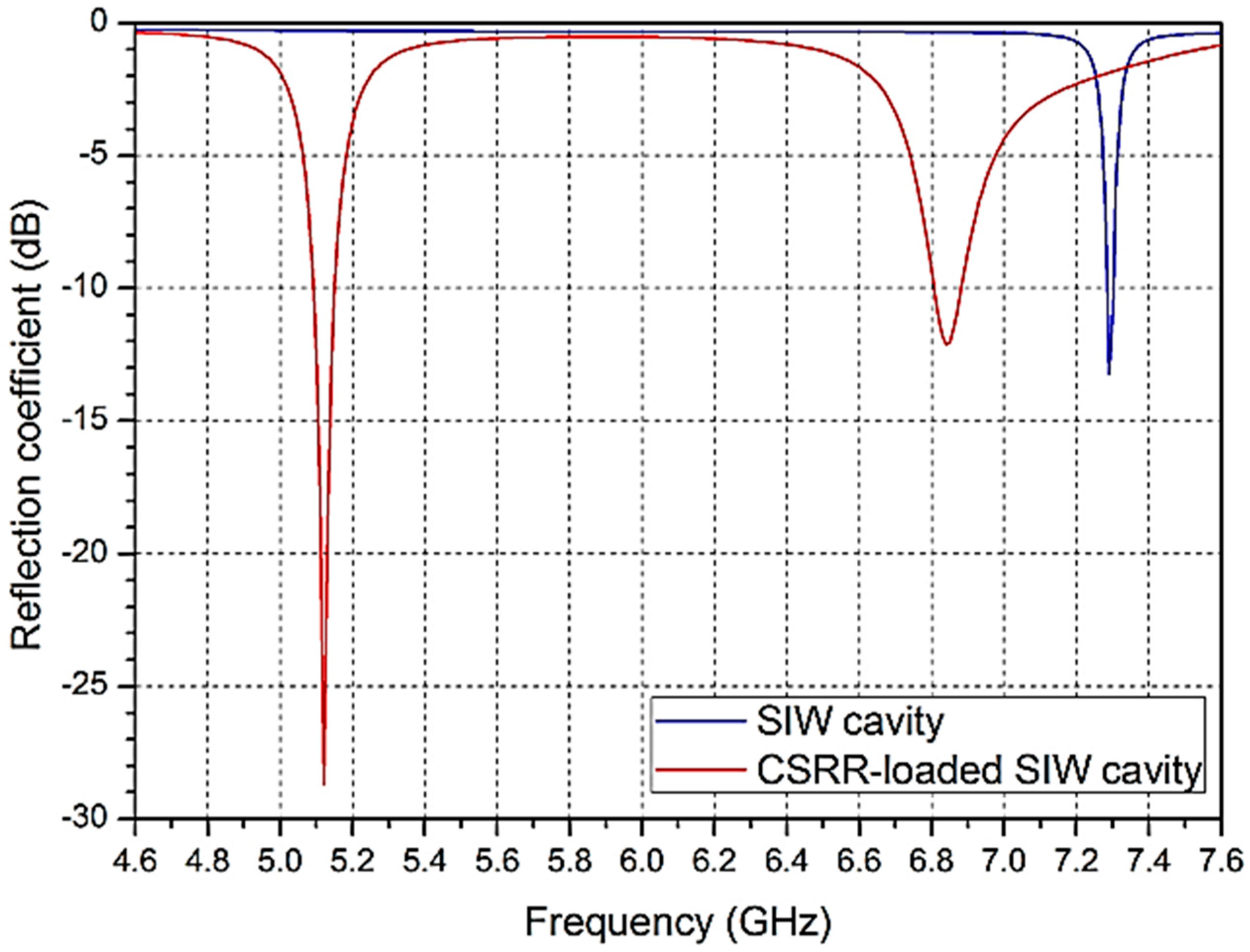
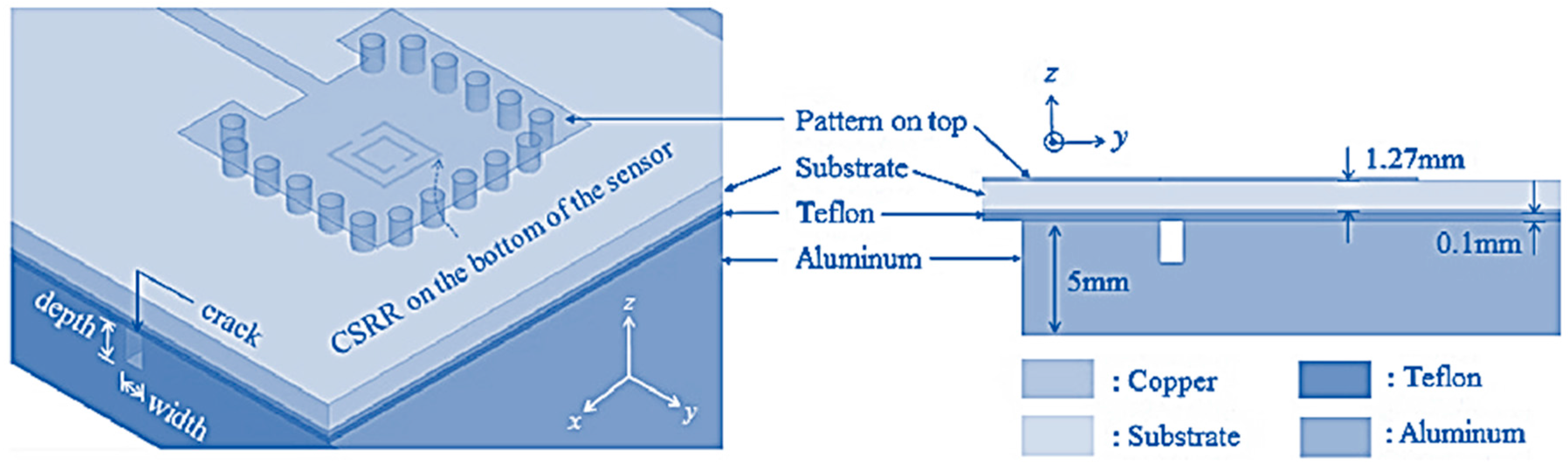
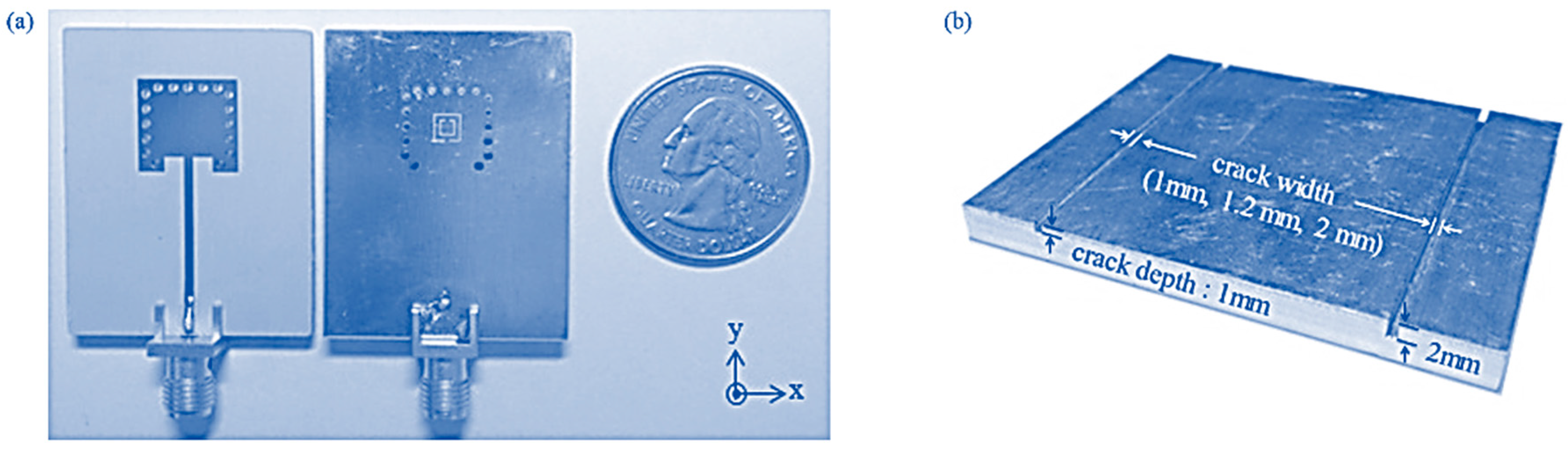
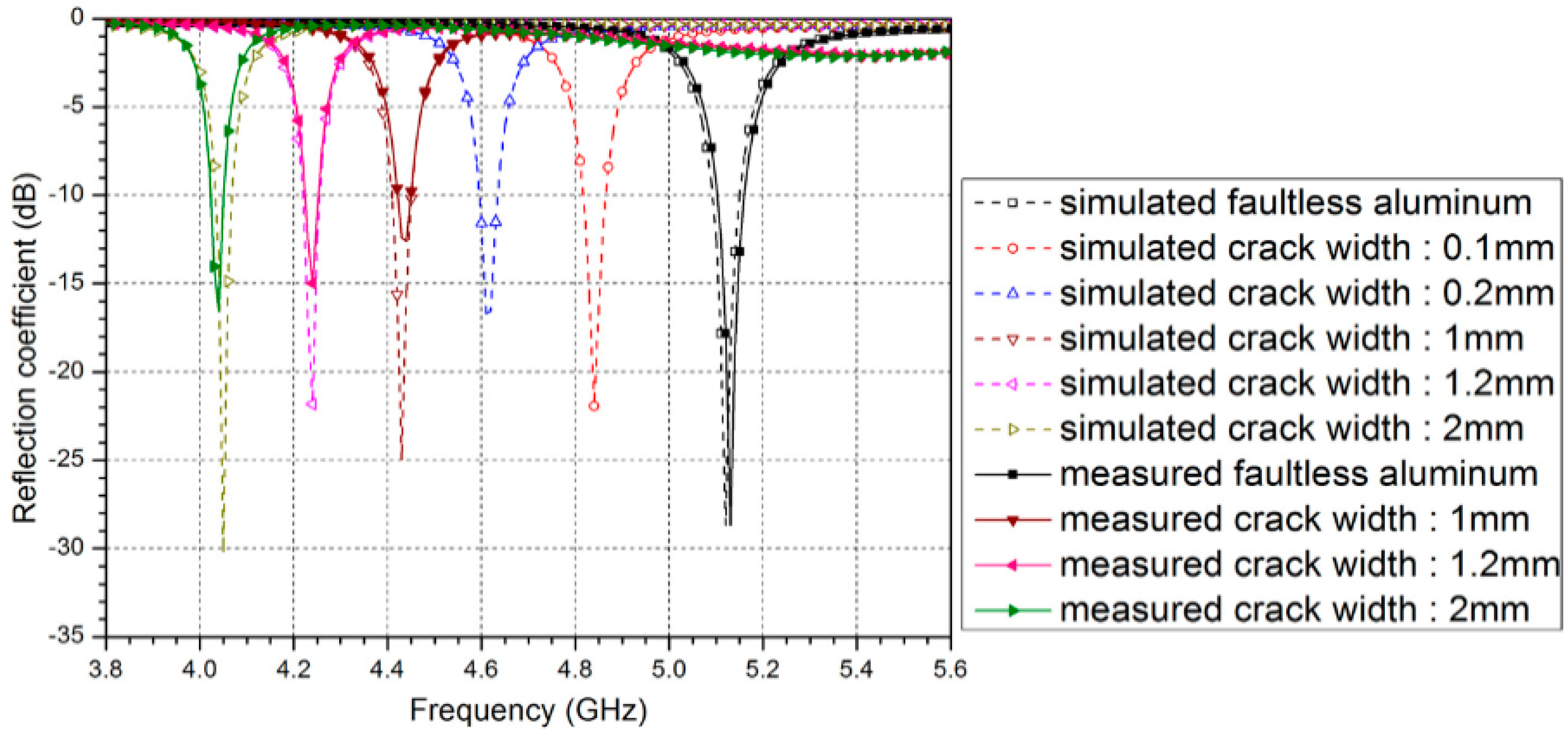
6. Complementary Split-Ring-Resonator-Loaded Substrate Integrated Waveguide Microwave Sensor for Crack Detection in Metallic Materials
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Prosser, W. Acoustic Emission. In Nondestructive Evaluation; CRC Press: Cleveland, OH, USA, 2002. [Google Scholar]
- Shull, P. Eddy Current. In Nondestructive Evaluation; CRC Press: Cleveland, OH, USA, 2002. [Google Scholar]
- Shull, P.; Joseph, K.; Lindgren, A.; Hagemaier, D. Magnetic Particle. In Nondestructive Evaluation; CRC Press: Cleveland, OH, USA, 2002. [Google Scholar]
- Shull, P.; Tittmann, B. Ultrasound. In Nondestructive Evaluation; CRC Press: Cleveland, OH, USA, 2002. [Google Scholar]
- Hruby, R.J.; Feinstein, L. A Novel Nondestructive, Noncontacting Method of Measuring the Depth of Thin Slits and Cracks in Metals. Rev. Sci. Instrum. 1970, 41, 679. [Google Scholar] [CrossRef]
- Husain, A.; Ash, E.A. Microwave Scanning Microscopy for Non-Destructive Testing. In Proceedings of the 5th European Microwave Conference, Hamburg, Germany, 1–4 September 1975; pp. 213–217.
- Bahr, A. Microwave Eddy-Current Techniques for Quantitative Nondestructive Evaluation. In Eddy-Current Characterization of Materials and Structures; ASTM International: West Conshohocken, PA, USA, 1981; pp. 311–331. [Google Scholar]
- Bahr, A.J. Microwave Nondestructive Testing Methods. In Nondestructive Testing Monographs and Tracts; Gordon and Breach Science Publishers: New York, NY, USA, 1982. [Google Scholar]
- Yeh, C. Detection and sizing of surface cracks in metals using open-ended rectangular waveguides. Master’s Thesis, Colorado State University, Fort Collins, CO, USA, July 1994. [Google Scholar]
- Yeh, C.Y.; Zoughi, R. A Novel Microwave Method for Detection of Long Surface Cracks in Metals. IEEE Trans. Instrum. Meas. 1994, 43, 719–725. [Google Scholar]
- Yeh, C.; Zoughi, R. Microwave detection of finite surface cracks in metals using rectangular waveguides. Res. Nondestruct. Eval. 1994, 6, 35–55. [Google Scholar] [CrossRef]
- Yeh, C.-Y.; Ranu, E.; Zoughi, R. A novel microwave method for surface crack detection using higher order waveguide modes. Mater. Eval. 1994, 52, 676–681. [Google Scholar]
- Huber, C. Electromagnetic modeling of exposed and covered surface crack detection using open-ended waveguides. Master’s Thesis, Colorado State University, Fort Collins, CO, USA, July 1996. [Google Scholar]
- Huber, C.; Abiri, H.; Ganchev, S.I.; Zoughi, R. Analysis of the “crack characteristic signal” using a generalized scattering matrix representation. IEEE Trans. Microw. Theory Tech. 1997, 45, 477–484. [Google Scholar] [CrossRef]
- Huber, C.; Abiri, H.; Ganchev, S.I.; Zoughi, R. Modeling of surface hairline-crack detection in metals under coatings using an open-ended rectangular waveguide. IEEE Trans. Microw. Theory Tech. 1997, 45, 2049–2057. [Google Scholar] [CrossRef]
- Qaddoumi, N.; Ranu, E.; McColskey, J.D.; Mirshahi, R.; Zoughi, R. Microwave Detection of Stress-Induced Fatigue Cracks in Steel and Potential for Crack Opening Determination. Res. Nondestruct. Eval. 2000, 12, 87–103. [Google Scholar] [CrossRef]
- Zoughi, R. Microwave Non-Destructive Testing and Evaluation Principles; Springer: Heidelberg, Germany, 2000. [Google Scholar]
- Park, H.H.; Cho, Y.H.; Eom, H.J. Surface crack detection using flanged parallel-plate waveguide. Electron. Lett. 2001, 37, 1526–1527. [Google Scholar] [CrossRef]
- Mazlumi, F.; Sadeghi, S.H.H.; Moini, R. Interaction of Rectangular Open-Ended Waveguides With Surface Tilted Long Cracks in Metals. IEEE Trans. Instrum. Meas. 2006, 55, 2191–2197. [Google Scholar] [CrossRef]
- Campbell, H.; Bastidas, F.R.; Hughes, D.; Zoughi, R. Laboratory statistical analysis of new microwave dominant mode and higher-order mode probe designs. Master’s Thesis, Colorado State University, Fort Collins, CO, USA, July 2000. [Google Scholar]
- Campbell, H. Optimal open-ended waveguide probe design for surface crack detection in metals at microwave frequencies. Master’s Thesis, Colorado State University, Fort Collins, CO, USA, July 2001. [Google Scholar]
- Wang, Y. Modeling of surface crack detection using open-ended coaxial probes. Master’s Thesis, Colorado State University, Fort Collins, CO, USA, July 1999. [Google Scholar]
- Wang, Y.; Zoughi, R. Interaction of surface cracks in metals with open-ended coaxial probes at microwave frequencies. Mater. Eval. 2000, 58, 1228–1234. [Google Scholar]
- Wang, N. Open-ended coaxial probes for covered surface crack detection and evaluation in metals at microwave frequencies. Master’s Thesis, Colorado State University, Fort Collins, CO, USA, July 2001. [Google Scholar]
- Wang, N.; Zoughi, R. Moment method solution for modeling the interaction of open ended coaxial probes and surface cracks in metals. Mater. Eval. 2002, 60, 1253–1258. [Google Scholar]
- Ghasr, M.T.; Ying, K.P.; Zoughi, R. SAR imaging for inspection of metallic surfaces at millimeter wave frequencies. In Proceedings of the 2014 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Montevideo, Uruguay, 12–15 May 2014; pp. 1202–1206.
- Pozar, D. Microwave Engineering, 4th ed.; Addison Wesley: New York, NY, USA, 1990. [Google Scholar]
- Zoughi, R.; Kharkovsky, S. Microwave and millimetre wave sensors for crack detection. Fatigue Fract. Eng. Mater. Struct. 2008, 31, 695–713. [Google Scholar] [CrossRef]
- Kerouedan, J.; Qu, P.; Talbot, P.; de Blasi, S.; le Brun, A. Detection of micro-cracks on metal surfaces using near-field microwave dual-behavior resonator filters. Meas. Sci. Technol. 2008, 19, 10. [Google Scholar] [CrossRef]
- Tabib-Azar, M.; Shoemaker, N.S.; Harris, S. Non-destructive characterization of materials by evanescent microwaves. Meas. Sci. Technol. 1993, 4, 583–590. [Google Scholar] [CrossRef]
- Wang, R.; Li, F.; Tabib-Azar, M. Calibration methods of a 2 GHz evanescent microwave magnetic probe for noncontact and nondestructive metal characterization for corrosion, defects, conductivity, and thickness nonuniformities. Rev. Sci. Instrum. 2005, 76, 054701. [Google Scholar] [CrossRef]
- Quendo, C.; Rius, E.; Person, C. Narrow bandpass filters using dual-behavior resonators. IEEE Trans. Microw. Theory Tech. 2003, 51, 734–743. [Google Scholar] [CrossRef]
- Quendo, C.; Rius, E.; Person, C. Narrow bandpass filters using dual-behavior resonators based on stepped-impedance stubs and different-length stubs. IEEE Trans. Microw. Theory Tech. 2004, 52, 1034–1044. [Google Scholar] [CrossRef]
- Wei, T.; Xiang, X.-D.; Wallace-Freedman, W.G.; Schultz, P.G. Scanning tip microwave near-field microscope. Appl. Phys. Lett. 1996, 68, 3506. [Google Scholar] [CrossRef]
- Imtiaz, A.; Anlage, S.M. Effect of tip geometry on contrast and spatial resolution of the near-field microwave microscope. J. Appl. Phys. 2006, 100, 044304. [Google Scholar] [CrossRef]
- Talanov, V.V.; Scherz, A.; Schwartz, A.R. A Microfabricated Near-Field Scanned Microwave Probe for Noncontact Dielectric Constant Metrology of Low-k Films. In Proceedings of the 2006 IEEE MTT-S International Microwave Symposium Digest, San Francisco, CA, USA, 11–16 June 2006; pp. 1618–1621.
- Kleismit, R.A.; Kazimierczuk, M.K.; Kozlowski, G. Sensitivity and resolution of evanescent microwave microscope. IEEE Trans. Microw. Theory Tech. 2006, 54, 639–647. [Google Scholar] [CrossRef]
- Albishi, A.M.; Boybay, M.S.; Ramahi, O.M. Complementary Split-Ring Resonator for Crack Detection in Metallic Surfaces. IEEE Microw. Wirel. Compon. Lett. 2012, 22, 330–332. [Google Scholar] [CrossRef]
- Albishi, A.; Ramahi, O.M. Detection of surface and subsurface cracks in metallic and non-metallic materials using a complementary split-ring resonator. Sensors 2014, 14, 19354–19370. [Google Scholar] [CrossRef] [PubMed]
- Hu, B.; Ren, Z.; Boybay, M.S.; Ramahi, O.M. Waveguide probe loaded with split-ring resonators for crack detection in metallic surfaces. IEEE Trans. Microw. Theory Tech. 2014, 62, 871–878. [Google Scholar] [CrossRef]
- Yun, T.; Lim, S. Sensors and Actuators A: Physical High-Q and miniaturized complementary split ring resonator-loaded substrate integrated waveguide microwave sensor for crack detection in metallic materials. Sens. Actuators A. Phys. 2014, 214, 25–30. [Google Scholar] [CrossRef]
- Dong, Y.D.; Yang, T.; Itoh, T. Substrate integrated waveguide loaded by complementary split-ring resonators and its applications to miniaturized waveguide filters. IEEE Trans. Microw. Theory Tech. 2009, 57, 2211–2223. [Google Scholar] [CrossRef]
- Ge, Z.-C.; Zhang, W.-X.; Liu, Z.-G.; Gu, Y.-Y. Broadband and high-gain printed antennas constructed from Fabry-Perot resonator structure using EBG or FSS cover. Microw. Opt. Technol. Lett. 2006, 48, 1272–1274. [Google Scholar] [CrossRef]
- Zhang, Q.-L.; Yin, W.-Y.; He, S.; Wu, L.-S. Evanescent-Mode Substrate Integrated Waveguide (SIW) Filters Implemented with Complementary Split Ring Resonators. Prog. Electromagn. Res. 2011, 111, 419–432. [Google Scholar] [CrossRef]
- Deslandes, D.; Wu, K. Single-substrate integration technique of planar circuits and waveguide filters. IEEE Trans. Microw. Theory Tech. 2003, 51, 593–596. [Google Scholar] [CrossRef]








© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Memon, M.U.; Lim, S. Review of Electromagnetic-Based Crack Sensors for Metallic Materials (Recent Research and Future Perspectives). Metals 2016, 6, 172. https://doi.org/10.3390/met6080172
Memon MU, Lim S. Review of Electromagnetic-Based Crack Sensors for Metallic Materials (Recent Research and Future Perspectives). Metals. 2016; 6(8):172. https://doi.org/10.3390/met6080172
Chicago/Turabian StyleMemon, Muhammad Usman, and Sungjoon Lim. 2016. "Review of Electromagnetic-Based Crack Sensors for Metallic Materials (Recent Research and Future Perspectives)" Metals 6, no. 8: 172. https://doi.org/10.3390/met6080172
APA StyleMemon, M. U., & Lim, S. (2016). Review of Electromagnetic-Based Crack Sensors for Metallic Materials (Recent Research and Future Perspectives). Metals, 6(8), 172. https://doi.org/10.3390/met6080172