MPC Control and LQ Optimal Control of A Two-Link Robot Arm: A Comparative Study †



Abstract
:1. Introduction
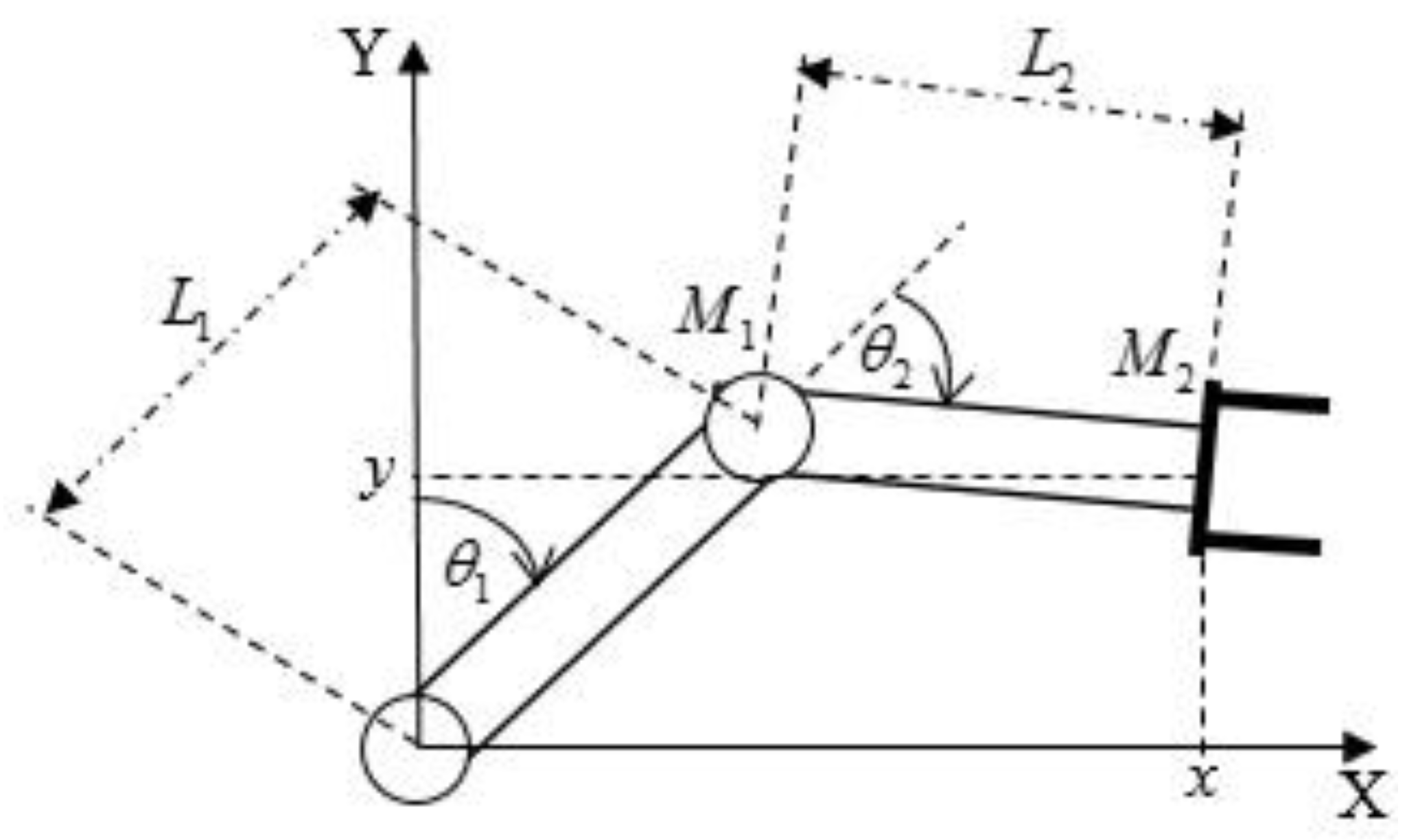
2. Dynamic Model
- is the vector of joint variables;
- is the vector of applied torques (control input);
- is the output vector;
- is a vector of gravity torques;
- represents the vector of Coriolis and centrifugal forces;
- is the inertia matrix with the following elements:
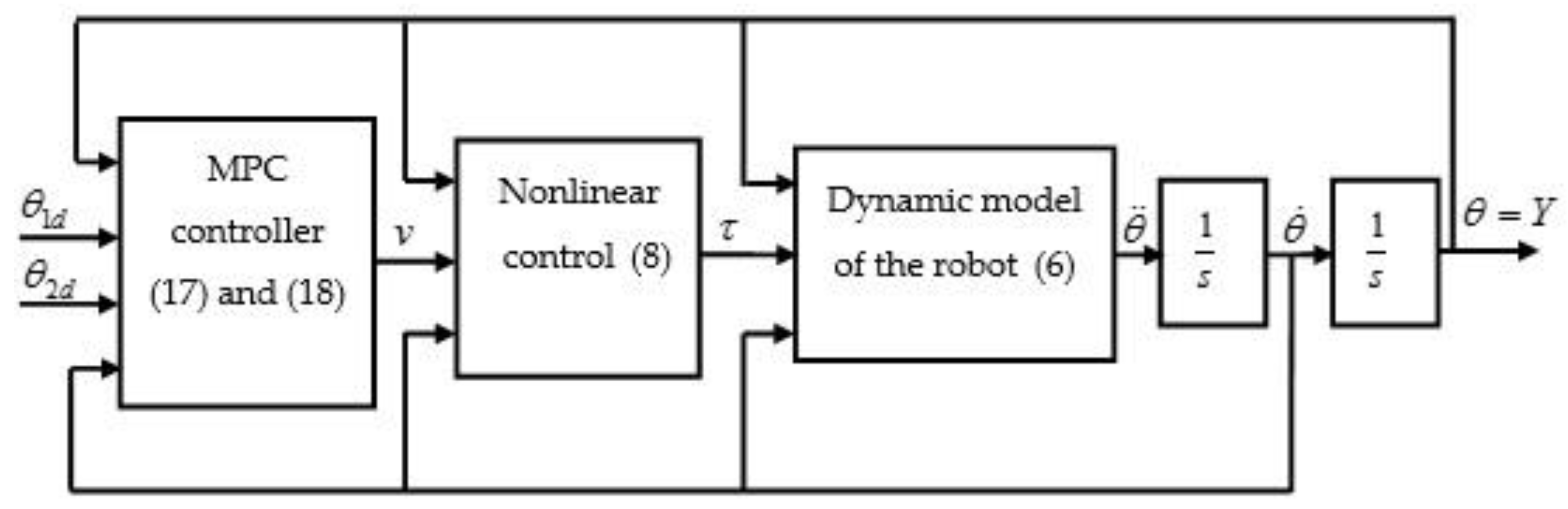
3. Controller Design
3.1. Feedback Linearization Control
3.2. Model Predictive Control
- the natural frequency is the chosen design parameter;
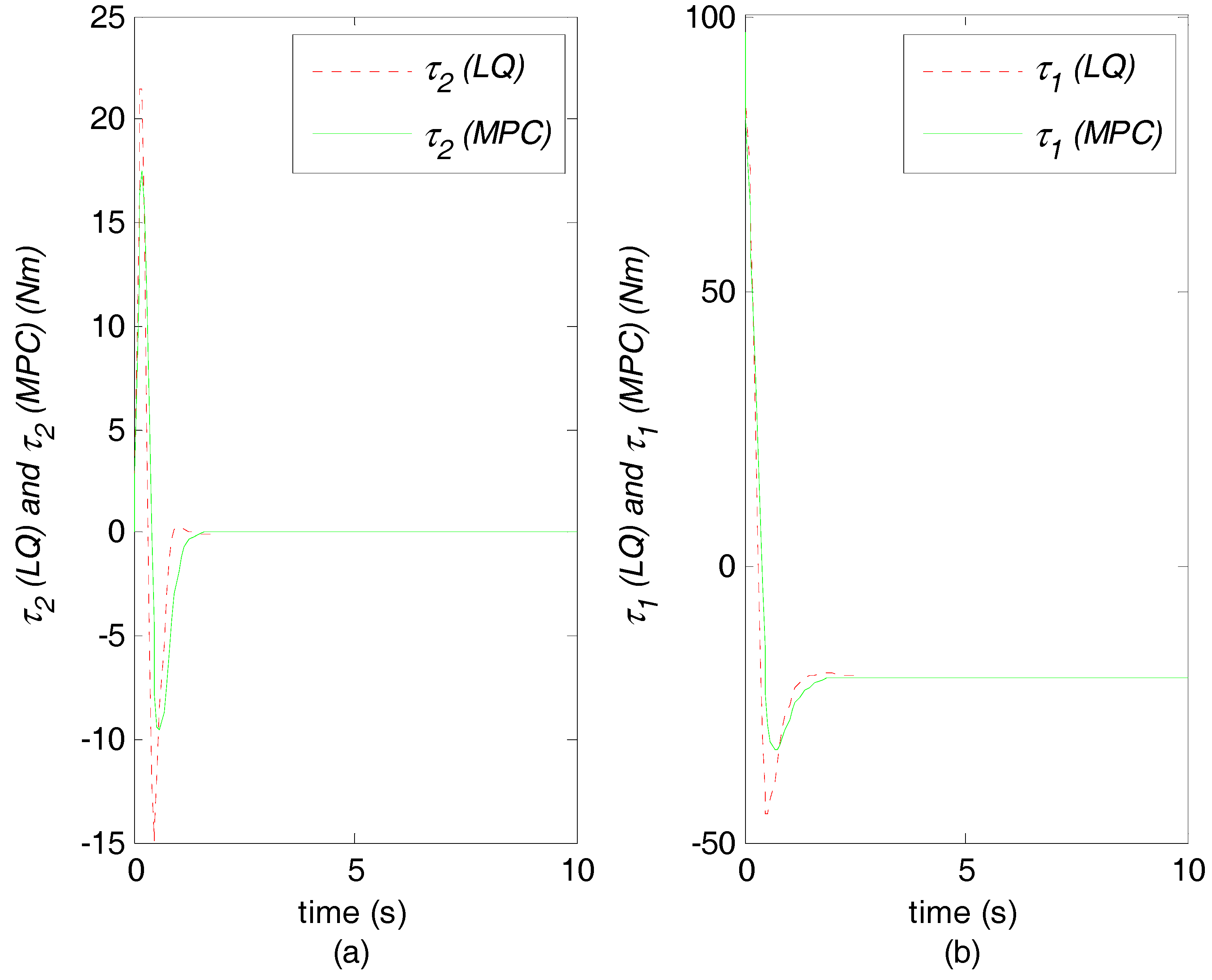
- the horizon time h and the weight factor are obtained using the above described procedure; and are the minimum and the maximum of the respective applied torques; the settling time corresponds to the times needed for the joint angles to settle within the band (±5%) of the final value;
- are the overshoots of the joint angles (in %) when a step change is applied to its reference;
- and is the index of the joint.
4. Linear Quadratic Optimal Control
- is a state vector;
- is the output vector;
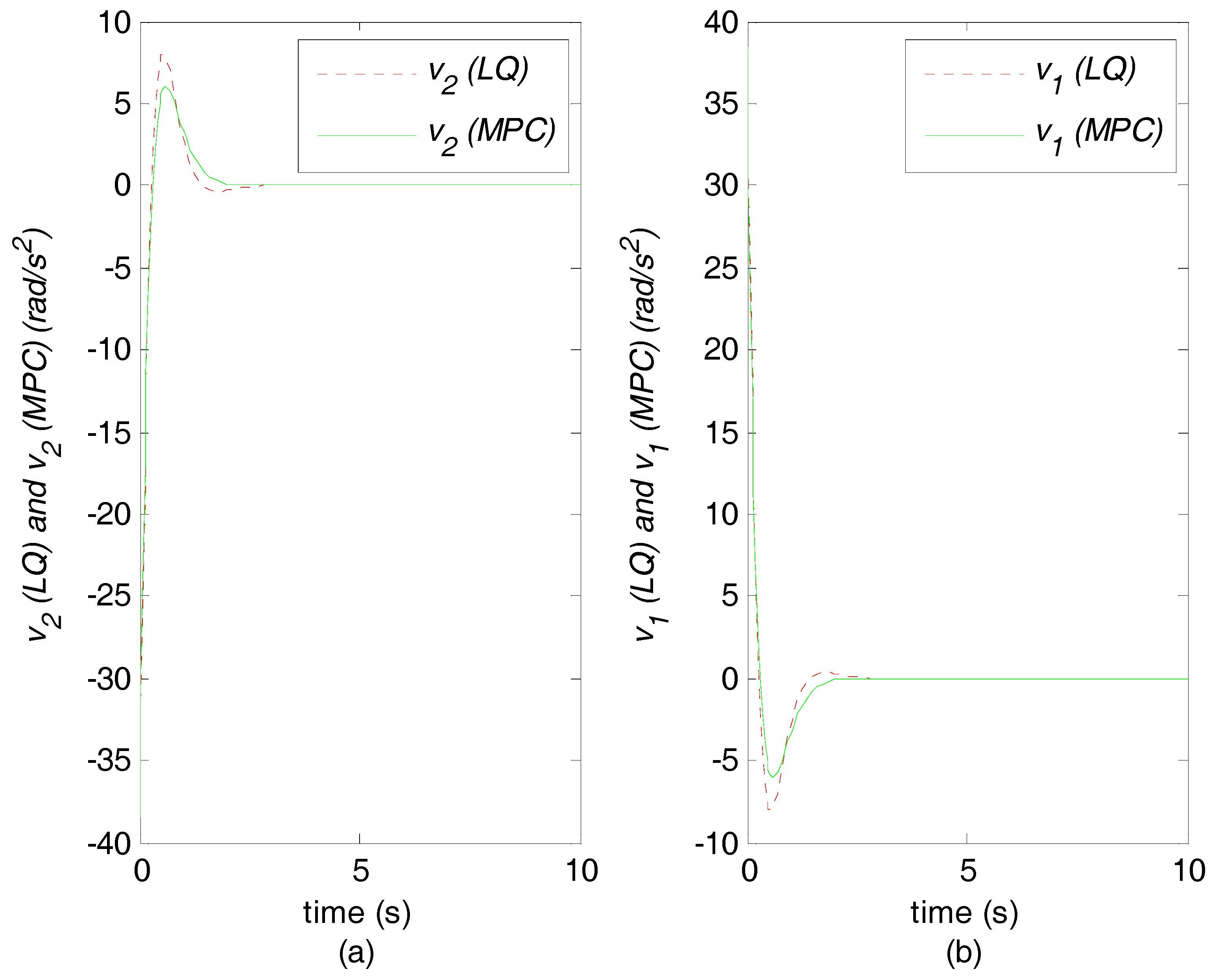
- is the synthetic control of the first joint of the robot;
- .
- is a symmetric positive semi-definite matrix,
- and is a positive constant.
5. Simulation Results
6. Conclusion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chaudhary, H.; Panwar, V.; Prasad, R.; Sukavanam, N. Adaptive neuro fuzzy based hybrid force/position control for an industrial robot manipulator. J. Intell. Manuf. 2016, 27, 1299–1308. [Google Scholar] [CrossRef]
- Zanotto, V.; Gasparetto, A.; Lanzutti, A.; Boscariol, P.; Vidoni, R. Experimental Validation of Minimum Time-jerk Algorithms for Industrial Robots. J. Intell. Robot. Syst. 2011, 64, 197–219. [Google Scholar] [CrossRef]
- Guoa, Q.; Yub, T.; Jiangc, D. Robust H∞ positional control of 2-DOF robotic arm driven by electro-hydraulic servo system. ISA Trans. 2015, 59, 55–94. [Google Scholar] [CrossRef] [PubMed]
- Plooij, M.; Wolfslag, W.; Wisse, M. Robust feedforward control of robotic arms with friction model uncertainty. Robot. Autom. Syst. 2015, 70, 83–91. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, C.; Zhang, Y.; Chen, C.L.P. Coordinated fuzzy control of robotic arms with actuator nonlinearities and motion constraints. Inf. Sci. 2015, 296, 1–13. [Google Scholar] [CrossRef]
- Duka, A.-V. Neural Network based Inverse Kinematics Solution for Trajectory Tracking of a Robotic Arm. Procedia Technol. 2014, 12, 20–27. [Google Scholar] [CrossRef]
- Uzunovic, T.; Baranb, E.-A.; Golubovicc, E.; Sabanovicd, A. A novel hybrid contouring control method for 3-DOF robotic manipulators. Mechatronics 2016, 40, 178–193. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Rocco, P. Motion planning for robotic manipulators using robust constrained control. Control Eng. Pract. 2017, 59, 127–136. [Google Scholar] [CrossRef]
- Özgüra, E.; Mezouarb, Y. Kinematic modeling and control of a robot arm using unit dual quaternions. Robot. Autom. Syst. 2016, 77, 66–73. [Google Scholar] [CrossRef]
- Markusa, E.D.; Ageeb, J.T.; Jimohc, A.A. Flat control of industrial robotic manipulators. Robot. Autom. Syst. 2017, 87, 226–236. [Google Scholar] [CrossRef]
- Verscheure, D.; Demeulenaere, B.; Swevers, J.; De Schutter, J.; Diehl, M. Practical Time-Optimal Trajectory Planning for Robots: A Convex Optimization Approach. IEEE Trans. Autom. Control 2009, 54, 2318–2327. [Google Scholar] [CrossRef]
- Boone, G. Minimum-time Control of the Acrobot. In Proceedings of the IEEE Intemational Conference on Robotics and Automation, New Mexico, NM, USA, 20–25 April 1997; pp. 3281–3287. [Google Scholar]
- Kai, C.-Y.; Huang, A.-C. Adaptive LQ control of robot manipulators. In Proceedings of the 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014. [Google Scholar] [CrossRef]
- Chen, K.-Y. Robust Optimal Adaptive Sliding Mode Control with the Disturbance Observer for a Manipulator Robot System. Int. J. Control Autom. Syst. 2018, 1–15. [Google Scholar] [CrossRef]
- Wilson, J.; Charest, M.; Dubay, R. Non-linear model predictive control schemes with application on a 2 link vertical robot manipulator. Robot. Comput. Integr. Manuf. 2016, 41, 23–30. [Google Scholar] [CrossRef]
- Rybus, T.; Seweryn, K.; Sasiadek, J.Z. Control system for free-floating space manipulator based on nonlinear model predictive control (NMPC). J. Intell. Robot. Syst. 2017, 85, 491–509. [Google Scholar] [CrossRef]
- Boucetta, R. Generalized Predictive Control for a Flexible Single-Link Manipulator. Comput. Inf. Syst. Ind. Manag. 2013, 499–510. [Google Scholar] [CrossRef]
- Boscariol, P.; Gasparetto, A.; Zanotto, V. Model Predictive Control of a Flexible Links Mechanism. J. Intell. Robot. Syst. 2010, 58, 125–147. [Google Scholar] [CrossRef]
- Kayastha, S.; Shi, L.; Katupitiya, J.; Pearce, G. Nonlinear model predictive control of a planar three-link space manipulator. In Proceedings of the 11th Asian Control Conference (ASCC), Gold Coast, QLD, Australia, 17–20 December 2017. [Google Scholar] [CrossRef]
- Avanzini, G.-B.; Zanchettin, A.-M.; Rocco, P. Reactive constrained model predictive control for redundant mobile manipulators. Intell. Autom. Syst. 2015, 1301–1314. [Google Scholar] [CrossRef]
- Burlacu, A.; Copot, C.; Lazar, C. Predictive control architecture for real-time image moments based servoing of robot manipulators. J. Intell. Manuf. 2014, 25, 1125–1134. [Google Scholar] [CrossRef]
- Durmuş, B.; Temurtaş, H.; Yumuşak, N.; Temurtaş, F. A study on industrial robotic manipulator model using model based predictive controls. J. Intell. Manuf. 2009, 20, 233–241. [Google Scholar] [CrossRef]
- Boscariol, P.; Gasparetto, A.; Zanotto, V. Model predictive control of a flexible links mechanism. J. Intell. Robot. Sys. 2010, 58, 125–147. [Google Scholar] [CrossRef]
- David, I.; Robles, G. PID Control Dynamics of A Robotics Arm Manipulator with Two Degrees of Freedom. Control De Procesos y Robótica. 2012, pp. 1–7. Available online: https://fr.slideshare.net/popochis/pid-control-dynamics-of-a-robotic-arm-manipulator-with-two-degrees-of-freedom (accessed on 4 April 2017).
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall Inc.: Upper Saddle River, NJ, USA, 2002; ISBN 13: 978-0130673893. [Google Scholar]
- Farzin, P.; Yarmahmoudi, M.H.; Mirzaie, M.; Emamzadeh, S.; Hivand, Z. Design novel fuzzy robust feedback linearization control with application to robot manipulator. J. Intell. Syst. Appl. 2013, 5, 1–10. [Google Scholar] [CrossRef]
- Magni, L.; Scattolini, R.; Aström, K. Global stabilization of the inverted pendulum using model predictive control. In Proceedings of the 15th IFAC World Congress, Barcelona, Spain, 21–26 July 2002; pp. 141–146. [Google Scholar]
- Gawthrop, P.J.; Wang, L. Intermittent predictive control of an inverted pendulum. Control Eng. Pract. 2006, 14, 1347–1356. [Google Scholar] [CrossRef] [Green Version]
- Mills, A.; Wills, A.; Ninness, B. Nonlinear model predictive control of an inverted pendulum. In Proceedings of the American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 2335–2340. [Google Scholar]
- Guechi, E.-H.; Bouzoualegh, S.; Messikh, L.; Blažic, S. Model predictive control of a two-link robot arm. In Proceedings of the 2nd International Conference on Advanced Systems and Electric Technologies, Hammamet, Tunisia, 22–25 March 2018; pp. 409–414. [Google Scholar] [CrossRef]
- Bauer, P.; Bokor, J. Development and performance evaluation of an infinite horizon LQ optimal tracker. Eur. J. Control 2018, 39, 8–20. [Google Scholar] [CrossRef] [Green Version]
- Ntogramatzidis, L.; Ferrante, A. On the solution of the Riccati differential equation arising from the LQ optimal control problem. Syst. Control Lett. 2010, 59, 114–121. [Google Scholar] [CrossRef]
- Precup, R.-E.; Angelov, P.; Costa, B.S.J.; Sayed-Mouchaweh, M. An overview on fault diagnosis and nature-inspired optimal control of industrial process applications. Comput. Ind. 2015, 74, 75–94. [Google Scholar] [CrossRef]
- Precup, R.-E.; Sabau, M.-C.; Petriu, E.M. Nature-inspired optimal tuning of input membership functions of Takagi-Sugeno-Kang fuzzy models for anti-lock braking systems. Appl. Soft Comput. 2015, 27, 575–589. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
(rad/s) | h (s) | ρ | Min τ1 (Nm) | Max τ1 (Nm) | Min τ2 (Nm) | Max τ2 (Nm) | (s) | (s) | Dθ1 (%) | Dθ2 (%) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.6864 | 0.3822 | −20.21 | 26.28 | −0.78 | 1.43 | 4.86 | 4.86 | 0.5 | 0.5 |
| 2 | 0.3432 | 0.0955 | −22.20 | 45.14 | −3.13 | 5.64 | 2.42 | 2.42 | 0.5 | 0.5 |
| 3.5 | 0.1961 | 0.0312 | −33.33 | 96.97 | −9.57 | 17.54 | 1.4 | 1.4 | 0.5 | 0.5 |
| 4 | 0.1716 | 0.0239 | −39.46 | 120.49 | −12.56 | 22.92 | 1.22 | 1.22 | 0.5 | 0.5 |
| R | Min τ1 (Nm) | Max τ1 (Nm) | Min τ2 (Nm) | Max τ2 (Nm) | (s) | (s) | Dθ1 (%) | Dθ2 (%) |
|---|---|---|---|---|---|---|---|---|
| 1 | −21.15 | 26.28 | −1.21 | 1.76 | 6.19 | 6.19 | 13.56 | 13.56 |
| 1/100 | −39.46 | 82.83 | −12.21 | 17.80 | 1.96 | 1.96 | 13.56 | 13.56 |
| 1/150 | −44.88 | 96.95 | −14.75 | 21.48 | 1.78 | 1.78 | 13.56 | 13.56 |
| 1/200 | −49.19 | 108.85 | −17.09 | 25.03 | 1.64 | 1.64 | 13.56 | 13.56 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guechi, E.-H.; Bouzoualegh, S.; Zennir, Y.; Blažič, S. MPC Control and LQ Optimal Control of A Two-Link Robot Arm: A Comparative Study. Machines 2018, 6, 37. https://doi.org/10.3390/machines6030037
Guechi E-H, Bouzoualegh S, Zennir Y, Blažič S. MPC Control and LQ Optimal Control of A Two-Link Robot Arm: A Comparative Study. Machines. 2018; 6(3):37. https://doi.org/10.3390/machines6030037
Chicago/Turabian StyleGuechi, El-Hadi, Samir Bouzoualegh, Youcef Zennir, and Sašo Blažič. 2018. "MPC Control and LQ Optimal Control of A Two-Link Robot Arm: A Comparative Study" Machines 6, no. 3: 37. https://doi.org/10.3390/machines6030037