Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Localization and Quantification of Emission Rate

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Datasets and Procedures
3. Algorithm Development
3.1. Localization Algorithms
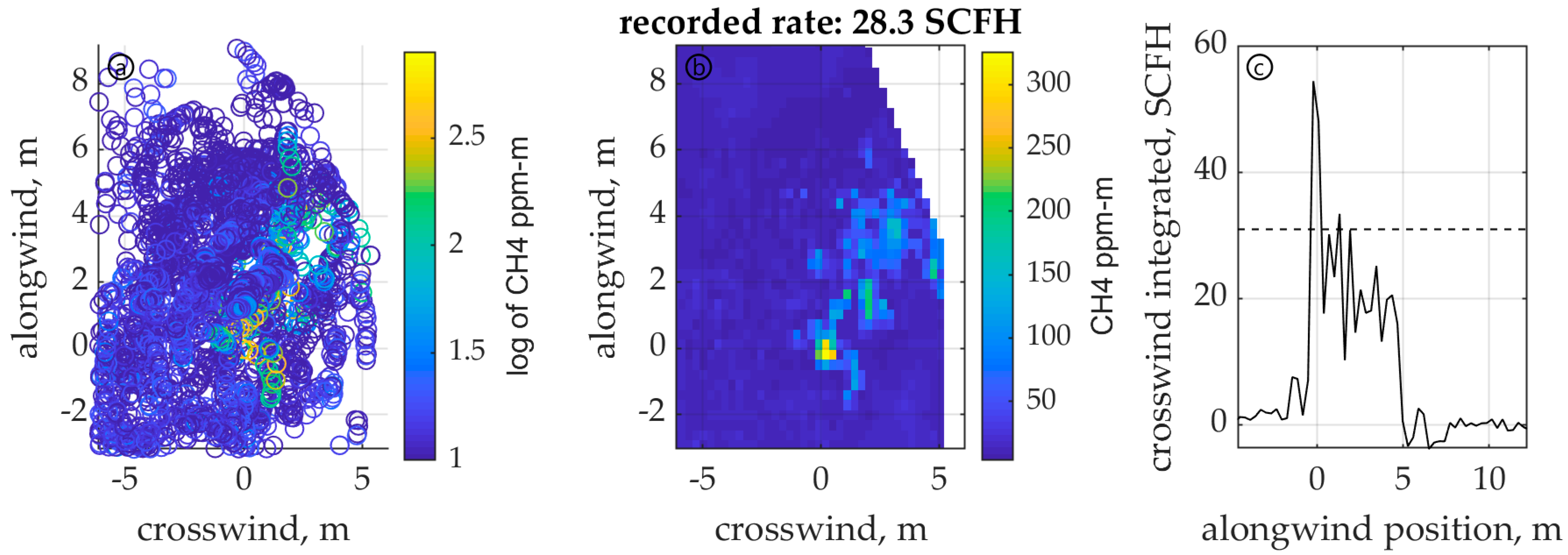
3.2. Quantification Algorithms
3.3. Detection Algorithm
4. Algorithm Performance
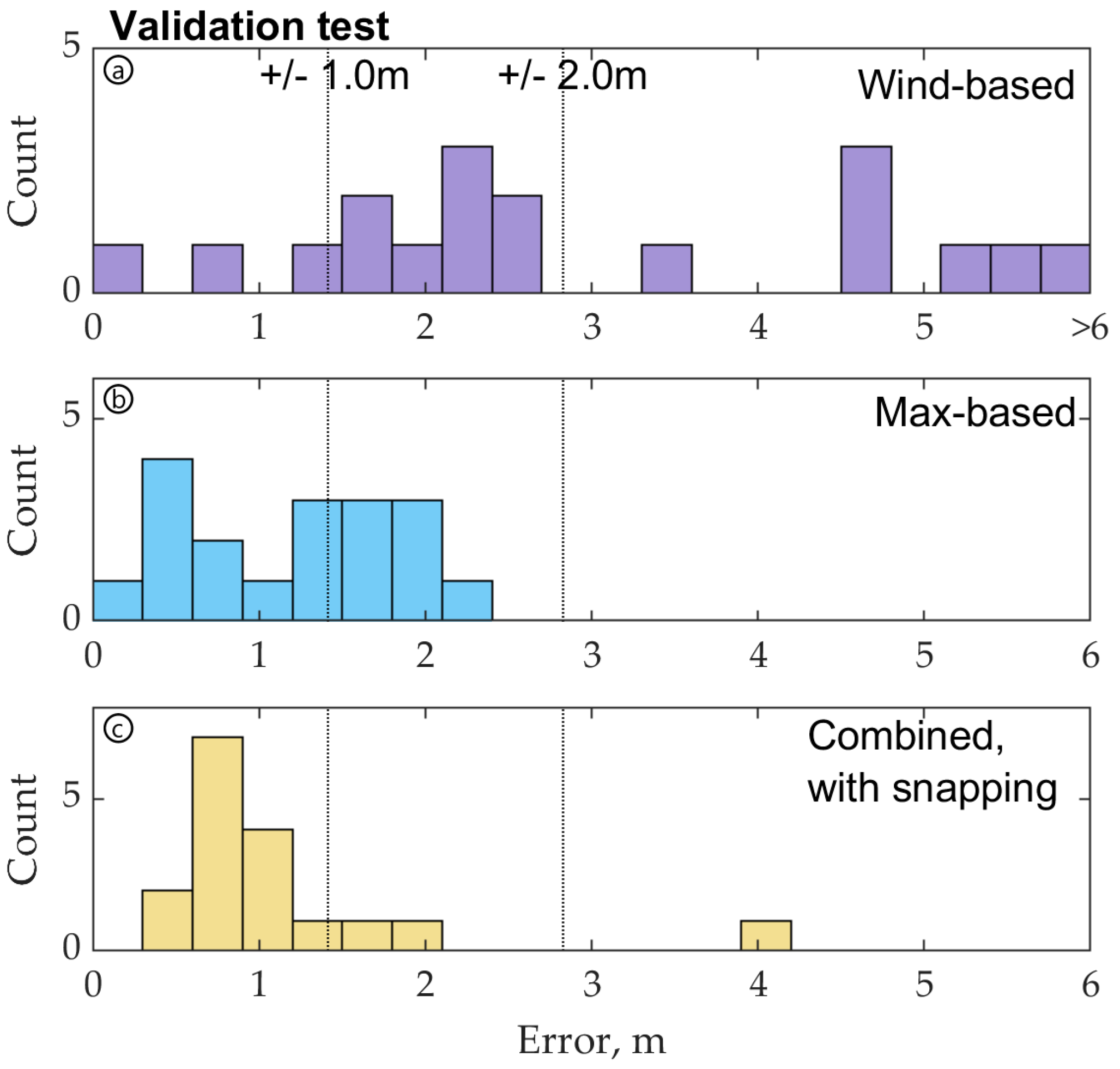
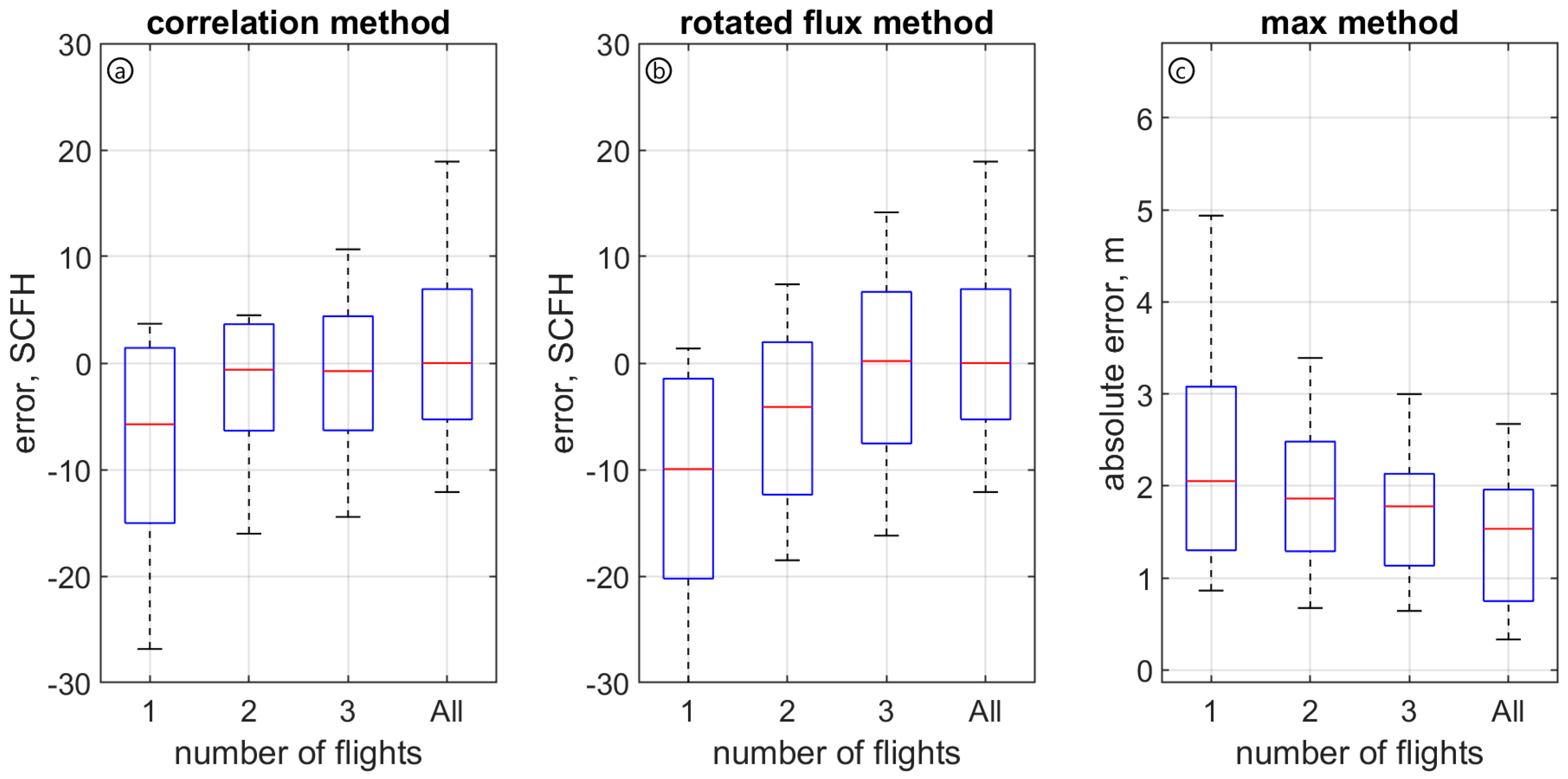
4.1. Leak Localization
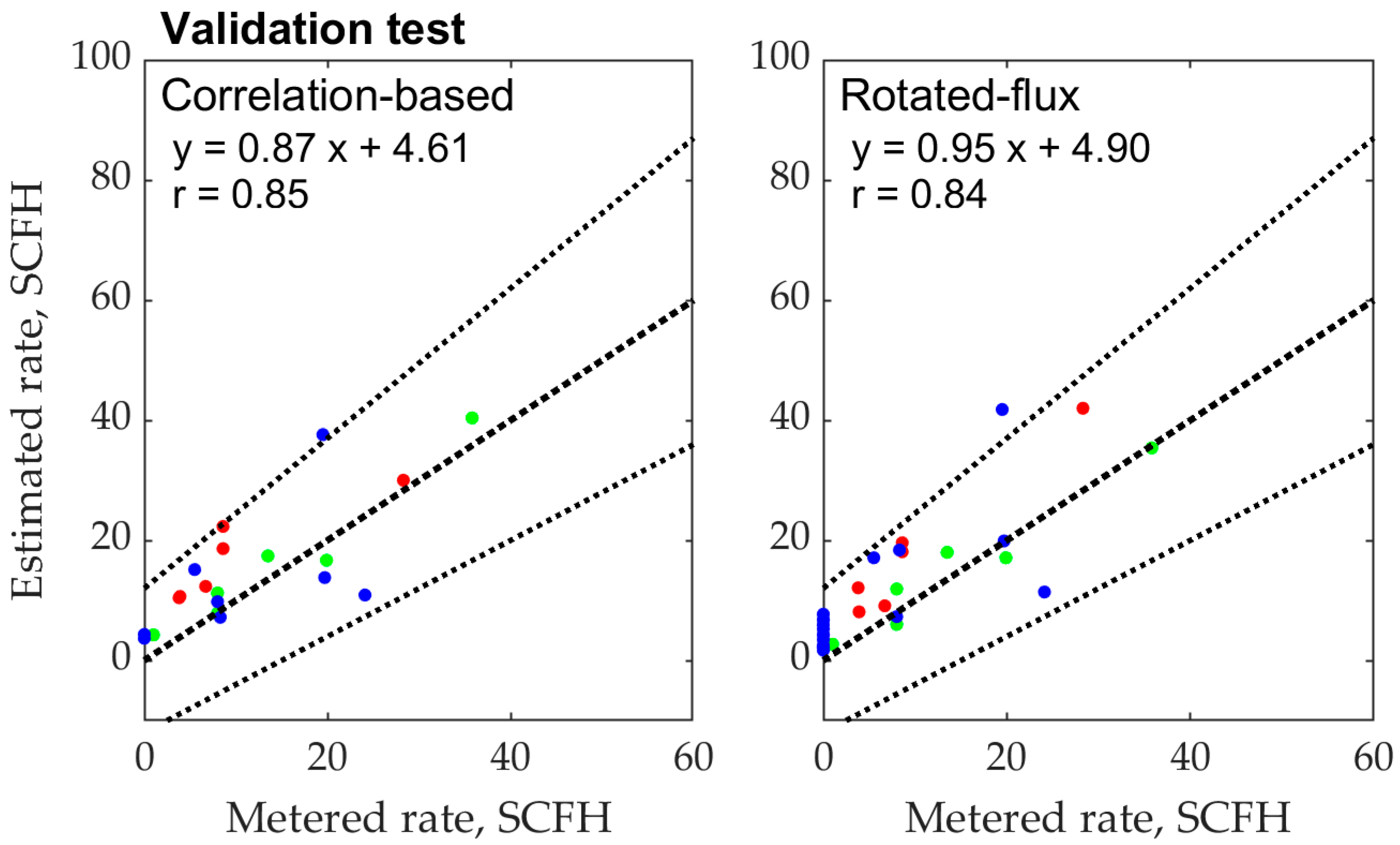
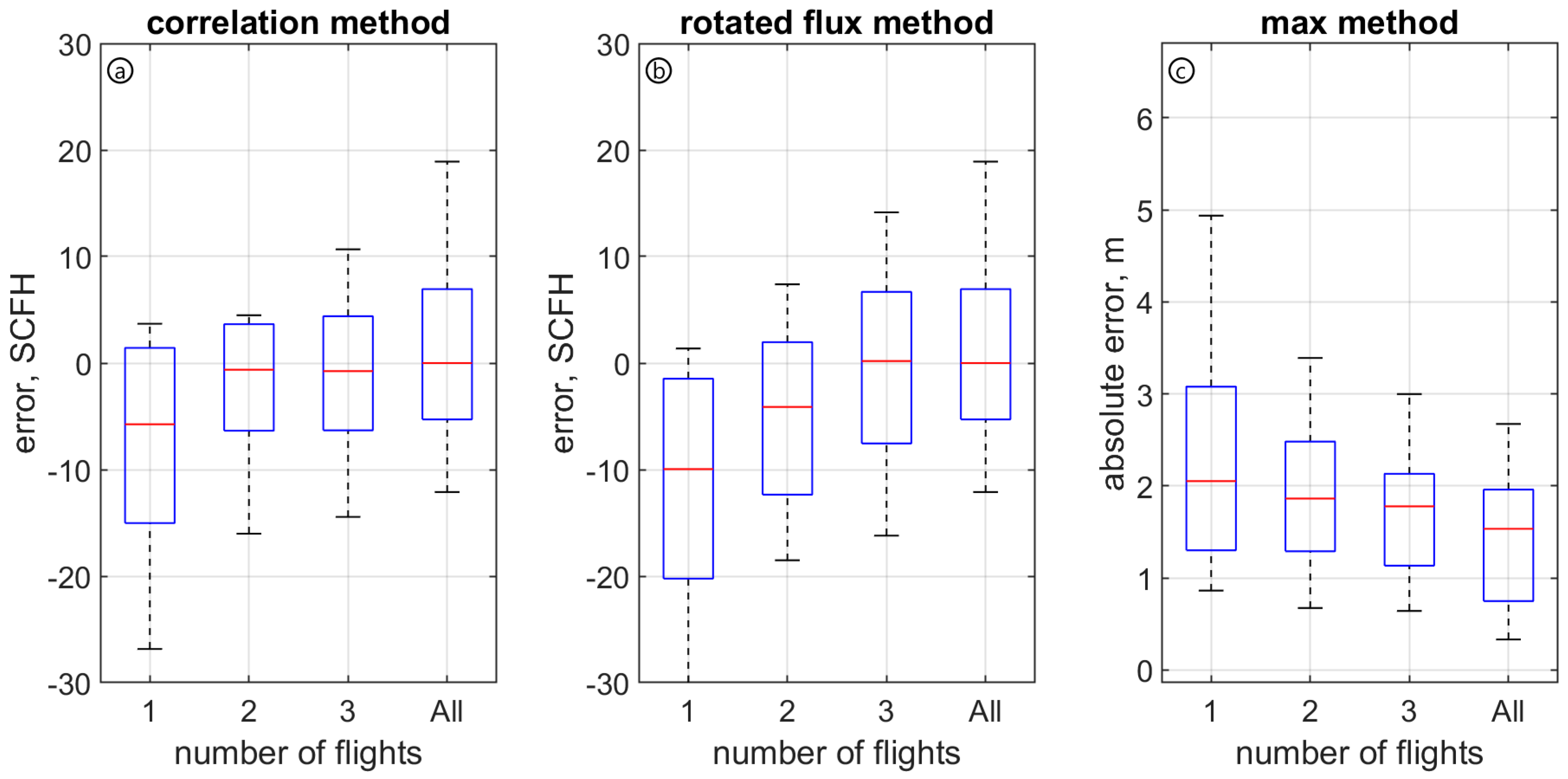
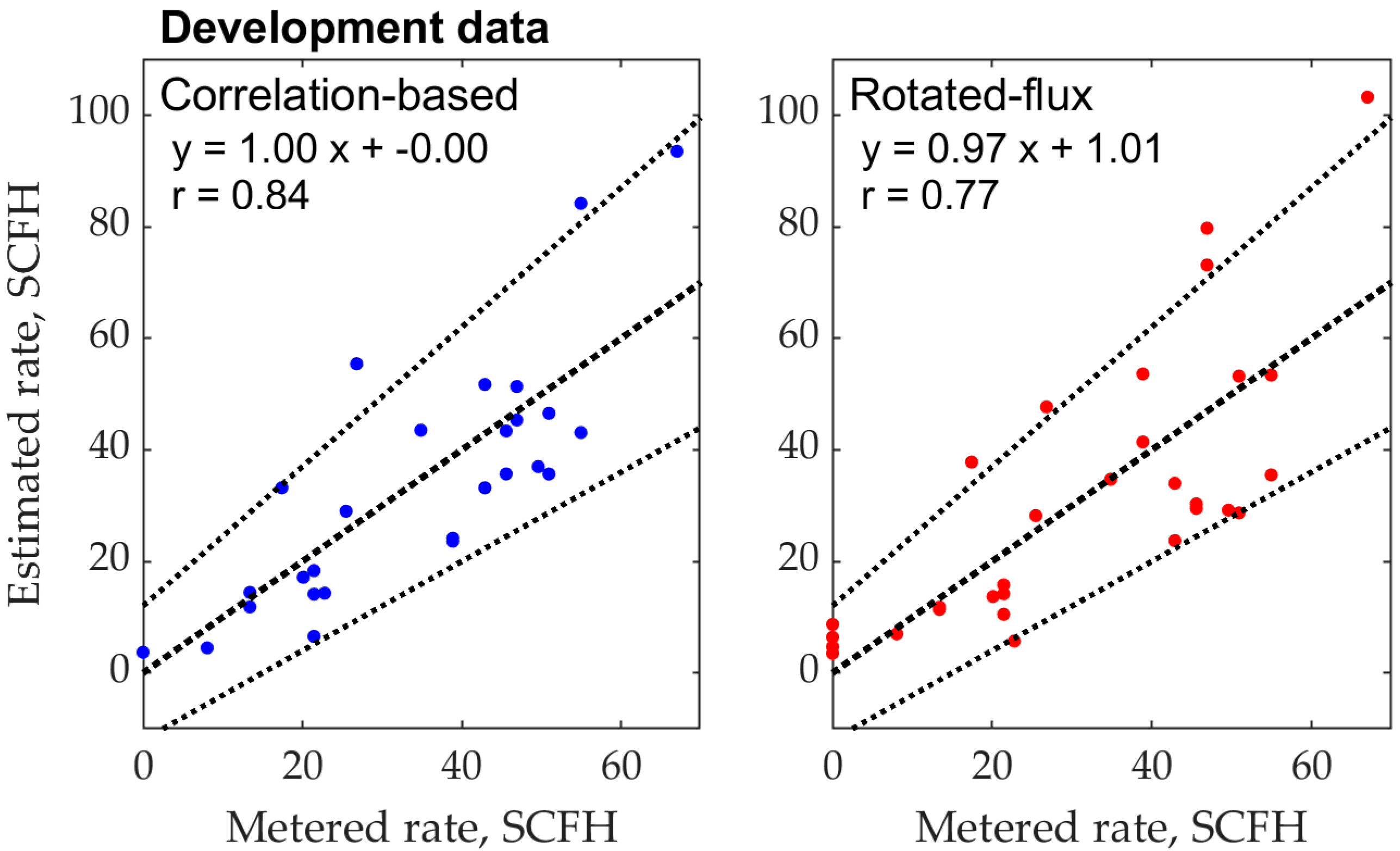
4.2. Leak Detection and Quantification
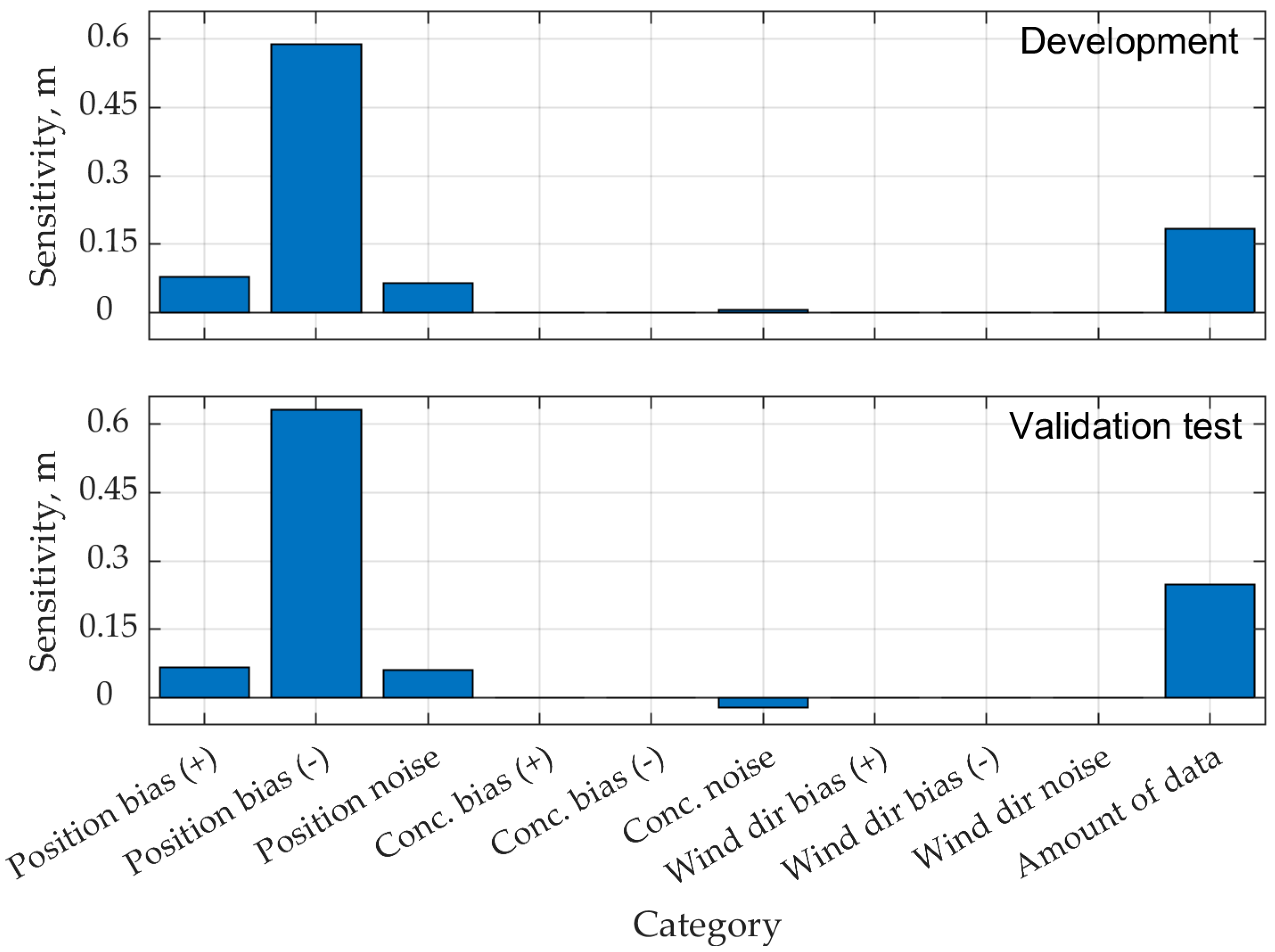
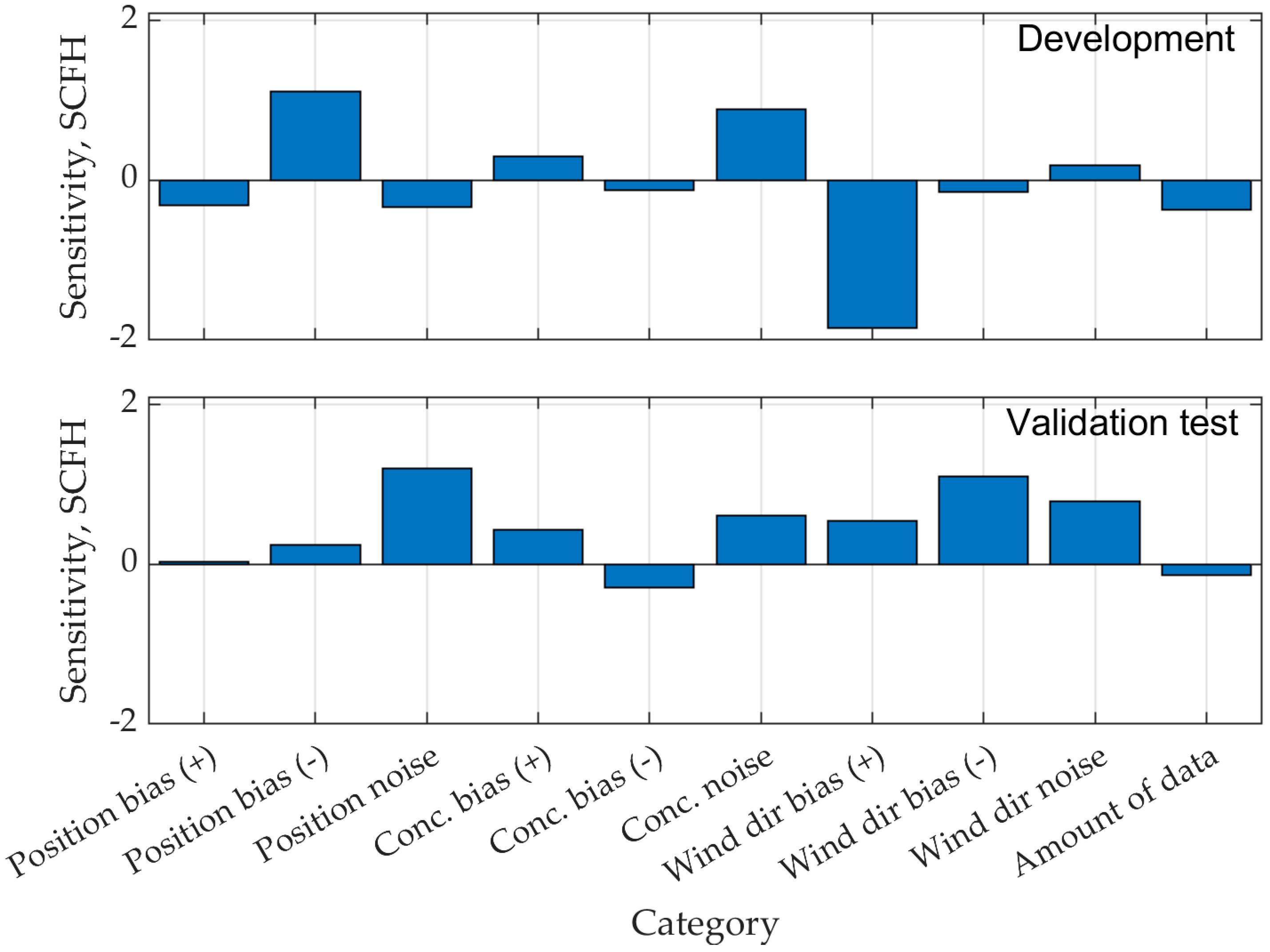
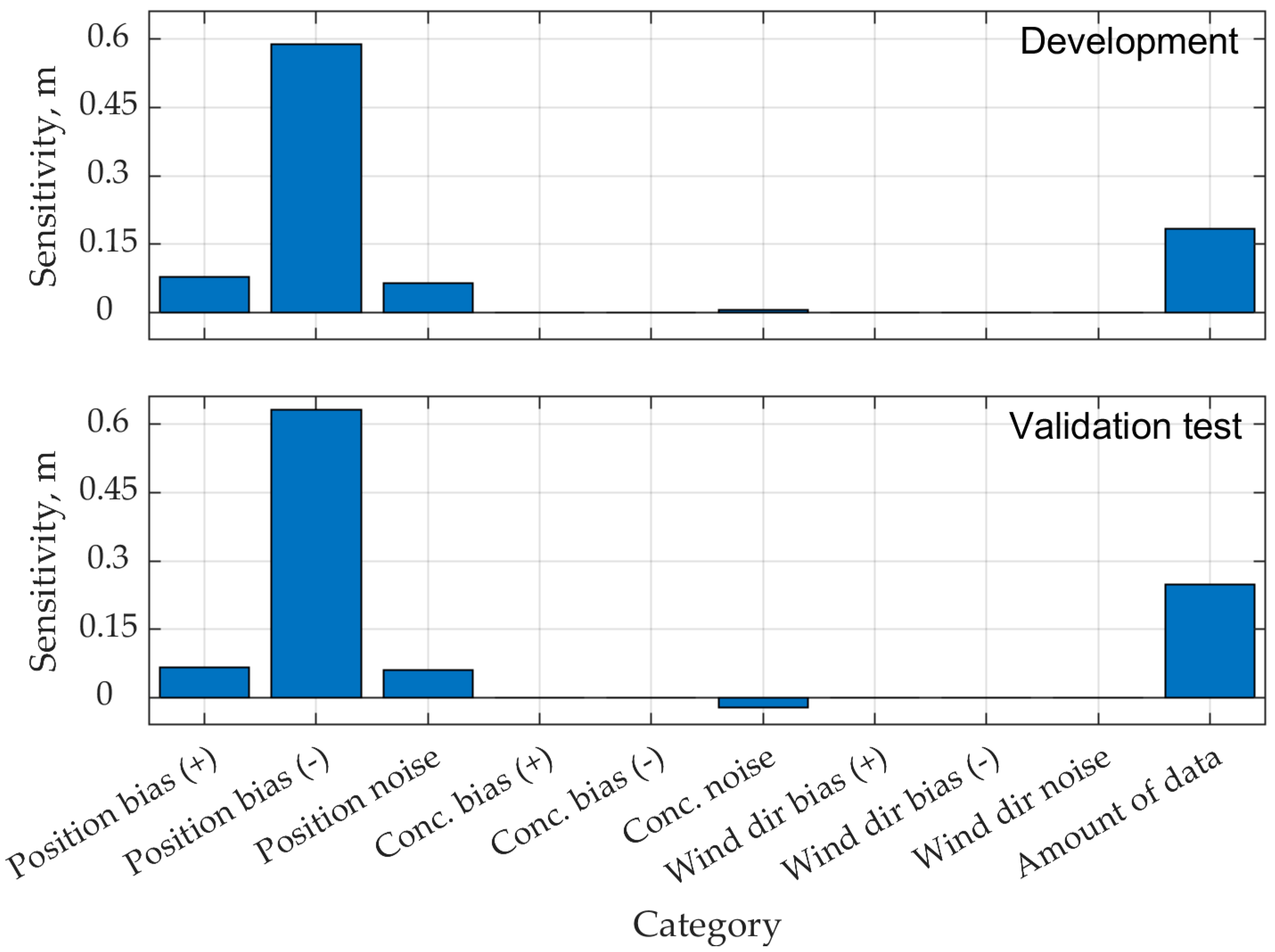
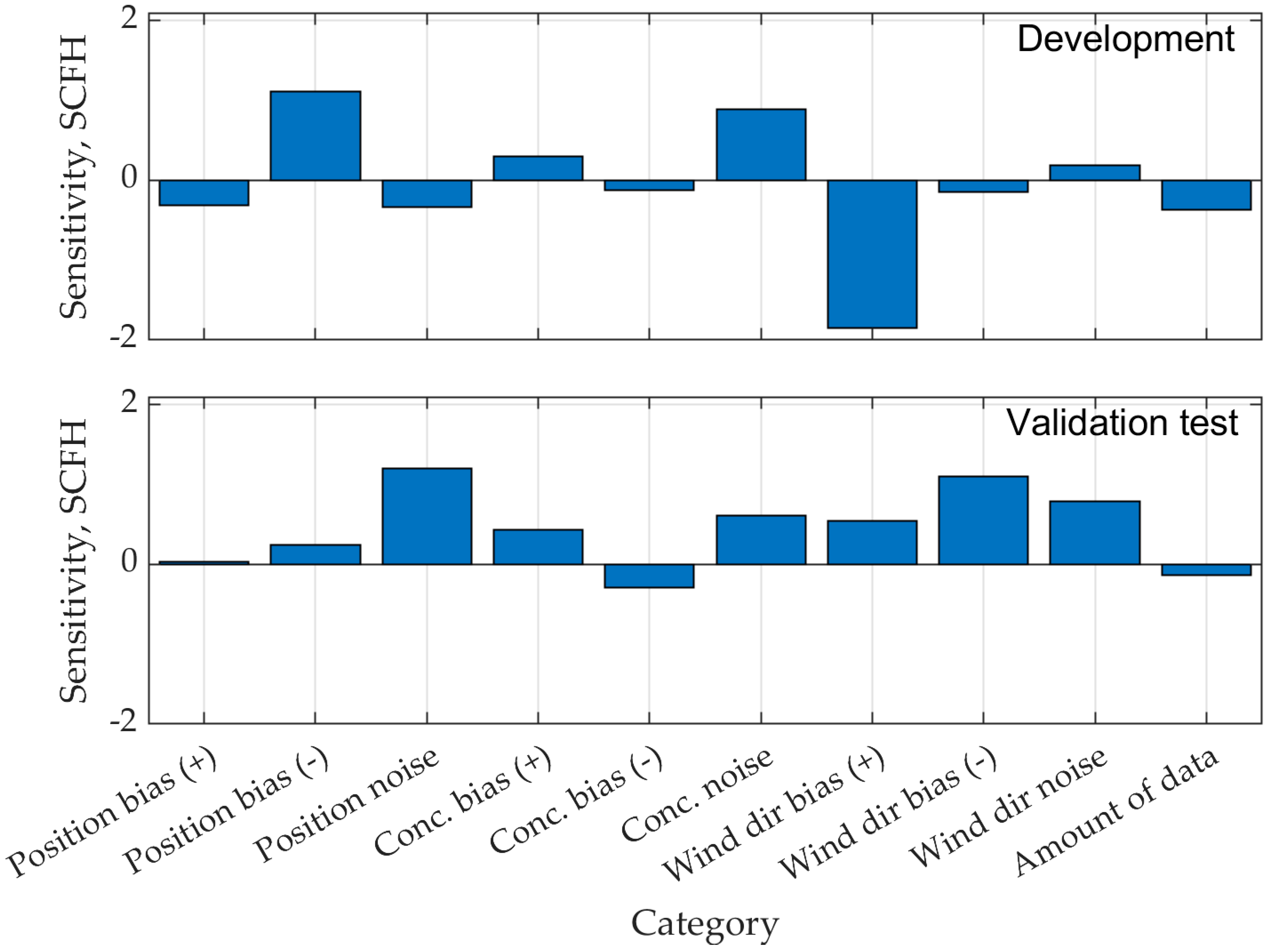
4.3. Component Sensitivity and Uncertainty Analyses
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Saunois, M.; Bousquet, P.; Poulter, B.; Peregon, A.; Ciais, P.; Canadell, J.G.; Dlugokencky, E.J.; Etiope, G.; Bastviken, D.; Houweling, S.; et al. The global methane budget 2000–2012. Earth Syst. Sci. Data 2016, 8, 697–751. [Google Scholar] [CrossRef] [Green Version]
- Turner, A.J.; Jacob, D.J.; Benmergui, J.; Wofsy, S.C.; Maasakkers, J.D.; Butz, A.; Hasekamp, O.; Biraud, S.C. A large increase in U.S. methane emissions over the past decade inferred from satellite data and surface observations. Geophys. Res. Lett. 2016, 43, 2218–2224. [Google Scholar] [CrossRef] [Green Version]
- Zavala-Araiza, D.; Alvarez, R.A.; Lyon, D.R.; Allen, D.T.; Marchese, A.J.; Zimmerle, D.J.; Hamburg, S.P. Super-emitters in natural gas infrastructure are caused by abnormal process conditions. Nat. Commun. 2017, 8, 14012. [Google Scholar] [CrossRef] [PubMed]
- Mayfield, E.N.; Robinson, A.L.; Cohon, J.L. System-wide and Superemitter Policy Options for the Abatement of Methane Emissions from the U.S. Natural Gas System. Environ. Sci. Technol. 2017, 51, 4772–4780. [Google Scholar] [CrossRef] [PubMed]
- Alvarez, R.A.; Zavala-Araiza, D.; Lyon, D.R.; Allen, D.T.; Barkley, Z.R.; Brandt, A.R.; Davis, K.J.; Herndon, S.C.; Jacob, D.J.; Karion, A.; et al. Assessment of methane emissions from the U.S. oil and gas supply chain. Science 2018, eaar7204. [Google Scholar] [CrossRef] [PubMed]
- Melvin, A.M.; Sarofim, M.C.; Crimmins, A.R. Climate Benefits of U.S. EPA Programs and Policies that Reduced Methane Emissions 1993–2013. Environ. Sci. Technol. 2016, 50, 6873–6881. [Google Scholar] [CrossRef] [PubMed]
- Ravikumar, A.P.; Wang, J.; Brandt, A.R. Are Optical Gas Imaging Technologies Effective For Methane Leak Detection? Environ. Sci. Technol. 2017, 51, 718–724. [Google Scholar] [CrossRef] [PubMed]
- Hanna, S.R.; Young, G.S. The need for harmonization of methods for finding locations and magnitudes of air pollution sources using observations of concentrations and wind fields. Atmos. Environ. 2017, 148, 361–363. [Google Scholar] [CrossRef]
- Hirst, B.; Jonathan, P.; González del Cueto, F.; Randell, D.; Kosut, O. Locating and quantifying gas emission sources using remotely obtained concentration data. Atmos. Environ. 2013, 74, 141–158. [Google Scholar] [CrossRef] [Green Version]
- Yacovitch, T.I.; Herndon, S.C.; Pétron, G.; Kofler, J.; Lyon, D.; Zahniser, M.S.; Kolb, C.E. Mobile Laboratory Observations of Methane Emissions in the Barnett Shale Region. Environ. Sci. Technol. 2015, 49, 7889–7895. [Google Scholar] [CrossRef] [PubMed]
- Rella, C.W.; Tsai, T.R.; Botkin, C.G.; Crosson, E.R.; Steele, D. Measuring Emissions from Oil and Natural Gas Well Pads Using the Mobile Flux Plane Technique. Environ. Sci. Technol. 2015, 49, 4742–4748. [Google Scholar] [CrossRef] [PubMed]
- Nathan, B.J.; Golston, L.M.; O’Brien, A.S.; Ross, K.; Harrison, W.A.; Tao, L.; Lary, D.J.; Johnson, D.R.; Covington, A.N.; Clark, N.N.; et al. Near-Field Characterization of Methane Emission Variability from a Compressor Station Using a Model Aircraft. Environ. Sci. Technol. 2015, 49, 7896–7903. [Google Scholar] [CrossRef] [PubMed]
- Chambers, A.K.; Strosher, M.; Wootton, T.; Moncrieff, J.; McCready, P. Direct Measurement of Fugitive Emissions of Hydrocarbons from a Refinery. J. Air Waste Manag. Assoc. 2008, 58, 1047–1056. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kemp, C.E.; Ravikumar, A.P.; Brandt, A.R. Comparing Natural Gas Leakage Detection Technologies Using an Open-Source “Virtual Gas Field” Simulator. Environ. Sci. Technol. 2016, 50, 4546–4553. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Talbot, R.W.; Frish, M.B.; Golston, L.M.; Aubut, N.F.; Zondlo, M.A.; Gretencord, C.; McSpiritt, J. Detection and Quantification of Fugitive Natural Gas Leaks Using an Unmanned Aerial System. 2018; submitted. [Google Scholar]
- Frish, M.B.; Wainner, R.T.; Stafford-Evans, J.; Green, B.D.; Allen, M.G.; Chancey, S.; Rutherford, J.; Midgley, G.; Wehnert, P. Standoff sensing of natural gas leaks: Evolution of the remote methane leak detector (RMLD). In Proceedings of the 2005 IEEE Quantum Electronics and Laser Science Conference, Baltimore, MD, USA, 22–27 May 2005; Volume 3, pp. 1941–1943. [Google Scholar]
- Wainner, R.T.; Green, B.D.; Allen, M.G.; White, M.A.; Stafford-Evans, J.; Naper, R. Handheld, battery-powered near-IR TDL sensor for stand-off detection of gas and vapor plumes. Appl. Phys. B Lasers Opt. 2002, 75, 249–254. [Google Scholar] [CrossRef]
- Schuyler, T.; Guzman, M. Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases. Atmosphere 2017, 8, 206. [Google Scholar] [CrossRef]
- Amanatides, J.; Woo, A. A Fast Voxel Traversal Algorithm for Ray Tracing. In Proceedings of the Eurographics ‘87; 1987. Available online: http://www.cse.chalmers.se/edu/year/2012/course/_courses_2011/TDA361/grid.pdf (accessed on 7 July 2018).
- Hashmonay, R.A.; Yost, M.G. Localizing Gaseous Fugitive Emission Sources by Combining Real-Time Optical Remote Sensing and Wind Data. J. Air Waste Manag. Assoc. 1999, 49, 1374–1379. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Foster-Wittig, T.A.; Thoma, E.D.; Albertson, J.D. Estimation of point source fugitive emission rates from a single sensor time series: A conditionally-sampled Gaussian plume reconstruction. Atmos. Environ. 2015, 115, 101–109. [Google Scholar] [CrossRef]
- Krings, T.; Neininger, B.; Gerilowski, K.; Krautwurst, S.; Buchwitz, M.; Burrows, J.P.; Lindemann, C.; Ruhtz, T.; Schüttemeyer, D.; Bovensmann, H. Airborne remote sensing and in situ measurements of atmospheric CO2 to quantify point source emissions. Atmos. Meas. Tech. 2018, 11, 721–739. [Google Scholar] [CrossRef]
- Conley, S.; Faloona, I.; Mehrotra, S.; Suard, M.; Lenschow, D.H.; Sweeney, C.; Herndon, S.; Schwietzke, S.; Pétron, G.; Pifer, J.; et al. Application of Gauss’s theorem to quantify localized surface emissions from airborne measurements of wind and trace gases. Atmos. Meas. Tech. 2017, 10, 3345–3358. [Google Scholar] [CrossRef]
- Albertson, J.D.; Harvey, T.; Foderaro, G.; Zhu, P.; Zhou, X.; Ferrari, S.; Amin, M.S.; Modrak, M.; Brantley, H.; Thoma, E.D. A Mobile Sensing Approach for Regional Surveillance of Fugitive Methane Emissions in Oil and Gas Production. Environ. Sci. Technol. 2016, 50, 2487–2497. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Frish, M.B. Systems and Methods for Sensitive Open-Path Gas Leak and Detection Alarm. U.S. Patent 9797798B2, 24 October 2017. [Google Scholar]
- Parkinson, B.W. GPS Error Analysis. In Global Positioning System: Theory and Applications, Volume 1; Parkinson, B.W., Spilker, J.J., Jr., Axelrad, P., Enge, P., Eds.; American Institute of Aeronautics and Astronautics: Reston, VI, USA, 1996; pp. 469–483. [Google Scholar]
- Conley, R.; Cosentino, R.; Hegarty, C.J.; Kaplan, E.D.; Leva, J.L.; de Haag, M.U.; Dyke, K. Van Performance of Stand-Alone GPS. In Understanding GPS: Principles and Applications, 2nd ed.; Kaplan, E.D., Hegarty, C.J., Eds.; Artech House: Norwood, MA, USA, 2006. [Google Scholar]
- Hutchinson, M.; Oh, H.; Chen, W.-H. A review of source term estimation methods for atmospheric dispersion events using static or mobile sensors. Inf. Fusion 2017, 36, 130–148. [Google Scholar] [CrossRef]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Golston, L.M.; Aubut, N.F.; Frish, M.B.; Yang, S.; Talbot, R.W.; Gretencord, C.; McSpiritt, J.; Zondlo, M.A. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Localization and Quantification of Emission Rate. Atmosphere 2018, 9, 333. https://doi.org/10.3390/atmos9090333
Golston LM, Aubut NF, Frish MB, Yang S, Talbot RW, Gretencord C, McSpiritt J, Zondlo MA. Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Localization and Quantification of Emission Rate. Atmosphere. 2018; 9(9):333. https://doi.org/10.3390/atmos9090333
Chicago/Turabian StyleGolston, Levi M., Nicholas F. Aubut, Michael B. Frish, Shuting Yang, Robert W. Talbot, Christopher Gretencord, James McSpiritt, and Mark A. Zondlo. 2018. "Natural Gas Fugitive Leak Detection Using an Unmanned Aerial Vehicle: Localization and Quantification of Emission Rate" Atmosphere 9, no. 9: 333. https://doi.org/10.3390/atmos9090333